Изобретение относится к области управления режимами и диагностики технического состояния электроприводного газоперекачивающего агрегата (ЭГПА) при транспортировке газа на основе нейросетевого диагностирования неисправностей для подсистем диагностирования агрегата (подсистемы смазки, нагнетателя, обмотки статора для двигателя, механических дефектов для двигателя) путем записи отклонений параметров для значений параметров ЭГПА в ходе эксплуатации от эталонных значений ЭГПА с помощью датчиков контролируемых параметров и системы управления, воздействующей на ЭГПА, с учетом оценки технического состояния по выявленным дефектам и коэффициента, учитывающего проявление неисправностей для определенного ЭГПА на основании проявление неисправностей для определенного ЭГПА на основании обработки данных с помощью искусственной нейронной сети (ИНС) типа Кохонена.
Известен способ диагностики неисправностей газоперекачивающих агрегатов (ГПА) с применением интеллектуальных систем (Антропов П.Г., Долинина О.Н. Использование интеллектуальных систем для диагностики неисправностей газоперекачивающих агрегатов/Вестник Самарского аэрокосмического университета №5 (47), часть 1, 2014, с. 75-84), согласно которому предложена интеллектуальная система для принятия решения по диагностике неисправностей ГПА, основанная на гибридной интеллектуальной системе, компонентами которой являются искусственная нейронная сеть (ИНС) и подсистема нечеткого вывода, где формируют базу нечетких правил с учетом входного вектора системы, содержащего числовые значения измеренных параметров ГПА; выходного вектора ИНС и входного вектора подсистемы нечеткого вывода, содержащего степени уверенности в наличии характерных неисправностей; выходного вектора системы, содержащего степени уверенности в наличии причин неисправностей. Полученные степени уверенности в совокупности с уже поданными на вход ИНС параметрами используются подсистемой нечеткого вывода для выявления возможных причин возникновения неисправностей.
Недостатком данного способа является то, что отсутствует классификация неисправностей ГПА, которая не позволяет производить оценку технического состояния с учетом отсутствия как внешних факторов, влияющих на процесс диагностирования, так и функции управления агрегатом и принятия решения диагностирования с учетом эксплуатации.
Известен способ диагностики прогнозирования технического состояния электроприводных газоперекачивающих агрегатов (Крюков О.В., Серебряков А.В. Анализ результатов прогнозирования технического состояния электроприводных газоперекачивающих агрегатов/ЭСиК, №1(30), 2016, с. 39-43), при котором выбирают диагностируемые параметры, подлежащие прогнозированию состояния обмотки статора для ЭГПА с учетом использования архитектуры встроенных систем мониторинга и прогнозирования технического состояния ЭГПА на базе искусственной нейронной сети, подбирают оптимальную конструкцию искусственной нейронной сети, выявляют типы неисправностей для обмотки статора с учетом кода искусственной нейронной сети, создают блок ИНС, формируют структуры классов по обучающей выборке, формируют выходные сигналы сети, определяют код ИНС, к которому относится тип неисправности обмотки статора, и делают вывод об изменении в техническом состоянии двигателя обмотки статора электроприводного газоперекачивающего агрегата.
Недостатками являются отсутствие оценки технического состояния ЭГПА только для одной подсистемы (двигатель-обмотка статора), то есть отсутствие классификации распознавания системы кластеров для выявления неисправностей (подсистем) и последующей оценки технического состояния для ЭГПА, которая учитывает влияние нейронных сетей на выявление неисправностей в процессе диагностирования. Данный способ не обеспечивает управление ЭГПА с учетом выявленных неисправностей, что не позволяет оценить эффективность функционирования ЭГПА в целом.
Известен способ диагностики технического состояния газотурбинного двигателя (патент РФ №2445598, опубл. 20.03.2012), который может быть использован для диагностики ЭГПА, при котором выбирают параметры, подлежащие диагностическому контролю, определяют исходные значения этих параметров, а также регистрируют параметры на диагностируемом газотурбинном двигателе с помощью датчиков и определяют отклонения значений зарегистрированных параметров от исходных значений. Затем формируют из этих отклонений векторы входных параметров, обрабатывают полученные данные с помощью НС Кохонена, которую предварительно обучают, формируют структуры классов по обучающей выборке, формируют выходные сигналы сети, выбирают нейрон с максимальным значением сигнала, определяют класс, к которому он относится, и делают вывод об изменении в техническом состоянии двигателя.
Недостатком данного способа является то, что отсутствует классификация распознавания системы кластеров для выявления неисправностей для определенных подсистем диагностирования на газотурбинном двигателе и последующей оценки технического состояния.
Известна система управления и мониторинга ЭГПА компрессорных станций в условиях стохастических возмущений (Рубцова И.Е. Управление и мониторинг электроприводов компрессорных станций в условиях стохастических возмущений/Известия Тульского государственного университета. С. 209-215), при которой производится прогнозирование технического состояния электродвигателя в режиме «online» на базе интеллектуальных датчиков и нечетких контроллеров для изоляции двигателя с учетом контроля и анализа температурных режимов, контроля состояния высоковольтной изоляции, контроля параметров питающего напряжения и потребляемого тока.
Основным недостатком данного способа является отсутствие подсистемы выявления классов неисправностей для всего ЭГПА, позволяющей диагностировать техническое состояние только для одной подсистемы (электродвигатель - обмотка статора) и осуществление дальнейшего управления и мониторинга, не позволяя оценить эффективность функционирования ЭГПА в целом с учетом оценки выявленных неисправностей.
Известна система диагностирования и управления ГПА (Зарицкий СП. Диагностика газоперекачивающих агрегатов с газотурбинным приводом. М.: Недра, 1987, с. 13-22), принятая за прототип, и может быть использована для ЭГПА, включающая измерение параметров для ГПА с помощью датчиков, установленных на ГПА, сбор информации как непосредственно, так и через регистратор наработки, проверку достоверности информации, фильтрацию измерений путем сравнения полученных значений с рабочими диапазонами датчиков с отбрасыванием выпадающих точек, проверку однородности наблюдений и оценки значимости изменения значений параметров с использованием статистических критериев, самопроверку путем отклонения различных параметров ГПА между собой с учетом матрицы эталонных отклонений параметров при изменении режима работы ГПА, корректировку показаний измерений, сверку с ограничениями, приведение параметров, усреднение измерений, вычисление признаков оперативного диагностирования по специальным алгоритмам, распознавание неисправностей, методом сравнения отклонений показаний с низшим пороговым значением и с предельно допустимым отклонением согласно диагностической модели по соответствующей неисправности, расчета относительных отклонений, поступающих в микропроцессор управления, с последующей оптимизацией режима функционирования и выбора режима диагностирования ГПА.
Недостатком является низкая точность диагностики для определения подсистем диагностирования и соответствующих им классов выявленных неисправностей ГПА для формирования и функционирования комплексной системы непрерывного технического обслуживания и ремонта ГПА, отсутствие выбора режима диагностирования, а также дальнейшего управления режимами ГПА с учетом выявленных неисправностей.
Техническим результатом способа является повышение точности диагностики технического состояния путем применения двух искусственных нейронных сетей типа Кохонена, позволяющих выявлять и прогнозировать неисправные состояния ЭГПА в динамике посредством выявления кластеров (подсистем диагностирования) и соответствующих им дефектов, а также дальнейшего управления режимами ЭГПА путем измерений параметров с помощью датчиков контролируемых параметров, сбора информации, фильтрации измерений с учетом сравнения полученных значений с рабочими диапазонами датчиков с отбрасыванием выпадающих точек, блока сверки с ограничениями и самопроверки микропроцессором, блоком приведения, усреднения, базой данных для эталонного ЭГПА и эксплуатируемого ЭГПА с учетом внешних факторов, нормирования данных, блока вычитания, учитывающего отклонения между значениями вектора измеренных параметров конкретного ЭГПА и вектора данных, рассчитанных с помощью НС Кохонена-1, тестирования НС Кохонена-2 и системой управления, воздействующей на ЭГПА, с учетом оценки технического состояния и дальнейшего изменение управления режимами ЭГПА.
Технический результат достигается тем, что вычисление признаков оперативного диагностирования и распознавание неисправностей осуществляют с учетом алгоритмов, основанных на работе двух искусственных нейронных сетей типа Кохонена, на основе которых рассчитывают и оценивают коэффициенты неисправностей для ЭГПА по подсистемам диагностирования, например подсистемы смазки, нагнетателя, обмотки статора для электродвигателя, механических дефектов для электродвигателя, после чего производят оценку технического состояния ЭГПА на основании полученных значений коэффициентов, учитывающих проявление неисправностей для ЭГПА, и производят выбор режима диагностирования и управления ЭГПА.
Способ поясняется следующей фигурой:
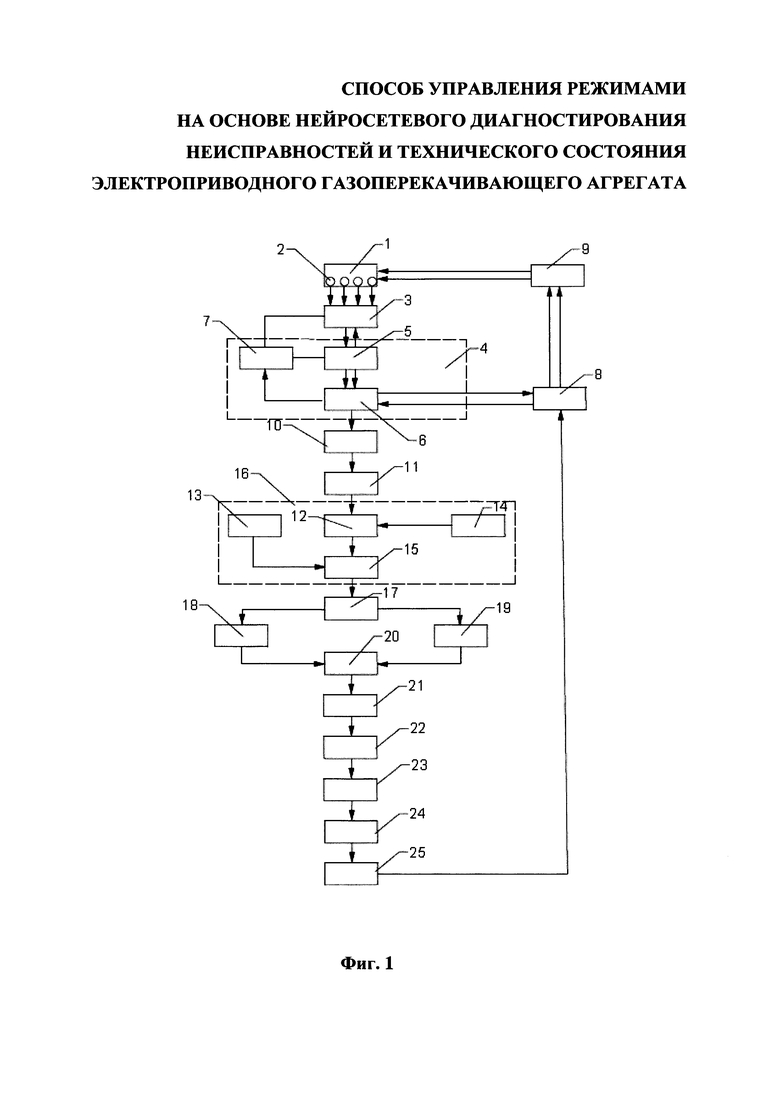
фиг. 1 - Структурная схема управления режимами на основе нейросетевого диагностирования неисправностей и технического состояния электроприводного газоперекачивающего агрегата;
фиг. 2 - Работа НС-Кохонена-2 по выявленным подсистемам диагностирования для ЭГПА, где
1 - электроприводной газоперекачивающий агрегат (ЭГПА);
2 - датчики контролируемых параметров;
3 - устройство сбора информации;
4 - блок подготовки данных;
5 - фильтр;
6 - блок сверки с ограничениями;
7 - блок самопроверки каналов измерений;
8 - микропроцессор;
9 - система управления ЭГПА;
10 - блок приведения параметров;
11 - блок усреднения измерений;
12 - база данных-1;
13 - база данных-2;
14 - база данных внешних факторов;
15 - общая база данных;
16 - постоянное запоминающее устройство (ПЗУ)
17 - блок нормировки;
18 - блок ИНС Кохонена-1;
19 - блок хранения нормированный данных ЭГПА 1;
20 - блок вычитания;
21 - блок ИНС Кохонена-2;
22 - блок тестирования;
23 - оценка технического состояния;
24 - блок прогнозирования;
25 - блок выбора режима диагностирования ЭГПА.
Способ осуществляется следующим образом. С помощью датчиков контролируемых параметров 2 (фиг. 1) в количестве Di, i=1…N, регистрируют параметры ЭГПА 1, которые поступают в устройство сбора информации 3 и далее поступают в блок подготовки данных 4, где осуществляется фильтрация измерений в фильтре 5, в котором происходит проверка однородности наблюдений с последующей оценкой значимости изменения значений параметров по статистическому r-критерию. При выполнении условия r>rкр сигналы поступают в блок сверки с ограничениями 6, иначе из фильтра 5 возвращаются в устройство сбора информации с 3 и поступают в блок самопроверки каналов измерений 7 для выявления причин изменения значений параметров, в котором происходит сравнение отклонения значений параметров эталонного ЭГПА, хранящиеся в базе данных-2 13, и ЭГПА 1 с составления массива данных, и возвращаются в блок фильтрации 5 при отсутствии аномальных изменений значений параметров, и далее поступают в блок сверки с ограничениями 6, в котором происходит сравнение параметров, включенных в систему защиты ЭГПА, с установленными ограничениями. При превышении 0,95 от заданного уровня параметра сигналы поступают на микропроцессор 8, который воздействует на систему управления 9, изменяя режим работы ЭГПА, исключая аварийную остановку агрегата, иначе сигналы из блока сверки с ограничениями 6 поступают в блок приведения параметров 10, в котором параметры приводятся к одним сопоставимым условиям, а затем к средним значениям в блоке усреднения измерений 11. После усреднения параметров в ПЗУ 16 формируют базу данных-1 12, где происходит сбор информации для дальнейшего составления общей базы данных 15, включающей базу данных-2 13, хранящей эталонные параметры ЭГПА 1, и базу данных внешних факторов 14. Затем в блоке нормировки 17 происходит процесс нормирования параметров ЭГПА из общей базы данных 15, переходя к безразмерным величинам, представленными числами в диапазоне [0…1], ввиду разнородности физических размерностей и диапазонов параметров. После нормирования данных в блоке нормировки 17 формируется массив данных для работы блока ИНС Кохонена-1 18, представленный базой данных-1. Далее происходит сравнение нормированных параметров ЭГПА, хранящихся в блоке хранения нормированных данных ЭГПА 1 19, с рассчитанными с помощью блока ИНС Кохонена-1 18, в блоке вычитания 20 и формируется сигнал о выявлении неисправностей ЭГПА с формированием массива данных для блока ИНС Кохонена-2 21, на выходе которой образуется бинарный вектор R={R1, R2…Rm}, компоненты которого определяет класс, к которому относится выявленная неисправность, с учетом измеренных параметров для ЭГПА. Далее производится тестирование результата в блоке тестирования 22. Оценка вероятности технического состояния ЭГПА производится в блоке тестирования 23, с учетом выявленных диагностируемых неисправностей производилась на основе анализа вектора R расчета расстояния Kd с дальнейшим расчетом прогнозного значения нагрузки для ЭГПА в блоке прогнозирования 24 и формирование в блоке выбора режима диагностирования ЭГПА 25 сигнала об изменении режима, который поступает на микропроцессор 8, воздействуя на систему управления 9, изменяя режим работы ЭГПА, исключая аварийную остановку агрегата. Выделяем типичные неисправности с учетом подсистем диагностирования, а также в составе обучающей выборки пять обобщенных классов состояний Si ЭГПА, соответствующие вектору R.
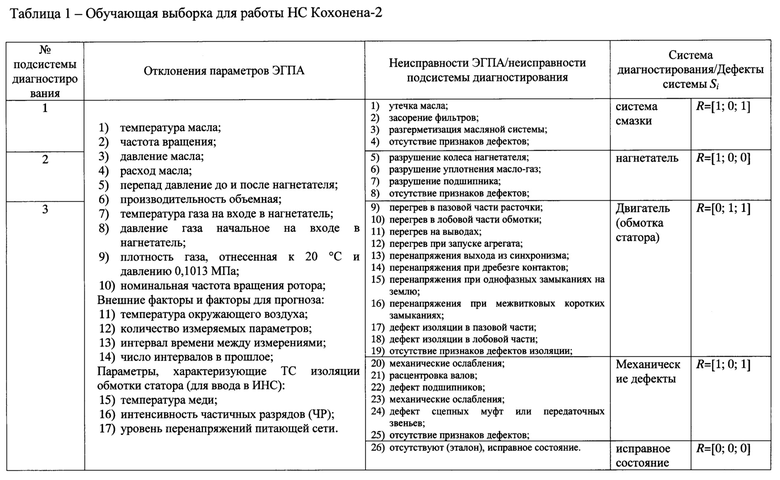
Основу обучения сети ИНС Кохонена-2 составляет конкуренция между нейронами. Сеть состояла из семнадцати входов (отклонения ΔYi) и выходов (по числу обобщенных классов состояний Si).
Обучение сети представляет процесс подбора значений весовых коэффициентов, которые минимизируют среднеквадратичные ошибки в результате от замены близких вектором весов. Входные векторы кодируются номерами нейронов-победителей (номера кластеров). Таким образом, все векторы из некоторой области входного пространства заменяются одним и тем же опорным вектором, являющимся их ближайшим соседом. Если максимум достигается одновременно на выходах нескольких сумматоров, то выходной сигнал, равный единице, соответствует одному из них, например первому.
Результаты процесса обучения ИНС Кохонена-2 показаны в таблице 2 и на фиг. 2 по выявленным классам (подсистемам диагностирования) для ЭГПА.

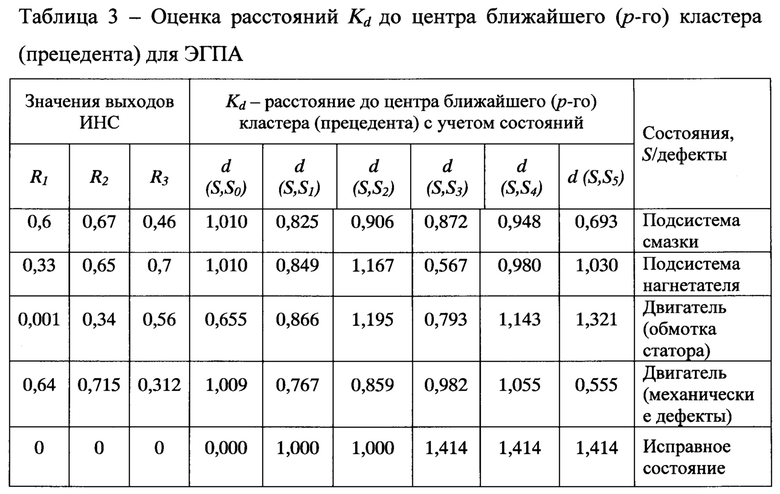
Определение управления режима работы с учетом нейросетевого диагностирования неисправностей и технического состояния для ЭГПА сводилось к нахождению Kd - расстояния до центра ближайшего (р-го) кластера (прецедента), образованного между координатами выявленного кластера Si (таблица 1) и координатами выхода ИНС Кохонена-2 («нейрона-победителя»), дальнейшего расчета прогнозного значения нагрузки для ЭГПА.
При этом расстояние вычисляется с использованием евклидовой метрики с учетом коэффициентов, учитывающих работу двух нейронных сетей Кохонена. По значениям компонент Ri можно оценить интенсивность дефекта (чем больше интенсивность дефекта, тем меньше расстояние до соответствующего прецедента).
Формула нахождения коэффициента, учитывающего проявление неисправностей для определенного ЭГПА или расстояния до центра ближайшего (р-го) кластера для выявления неисправностей ЭГПА и оценку технического состояния с учетом работы ИНС Кохонена-2, рассчитывается по следующей формуле:

где R1HC, R2HC, R3HC - значения координат для выявленного состояния Si ЭГПА с учетом появления неисправностей (результат ИНС Кохонена-2);
 - это значения координат для выявленных пяти состояний ЭГПА Si соответствующие вектору R, а также с учетом систем диагностирования и выявленных неисправностей;
- это значения координат для выявленных пяти состояний ЭГПА Si соответствующие вектору R, а также с учетом систем диагностирования и выявленных неисправностей;
 - коэффициент, учитывающий влияние ИНС Кохонена на выявленную неисправность в системе диагностирования ЭГПА.
- коэффициент, учитывающий влияние ИНС Кохонена на выявленную неисправность в системе диагностирования ЭГПА.
Оценка расстояний до центра ближайшего (р-го) кластера (прецедента) для ЭГПА представлена в таблице 3.
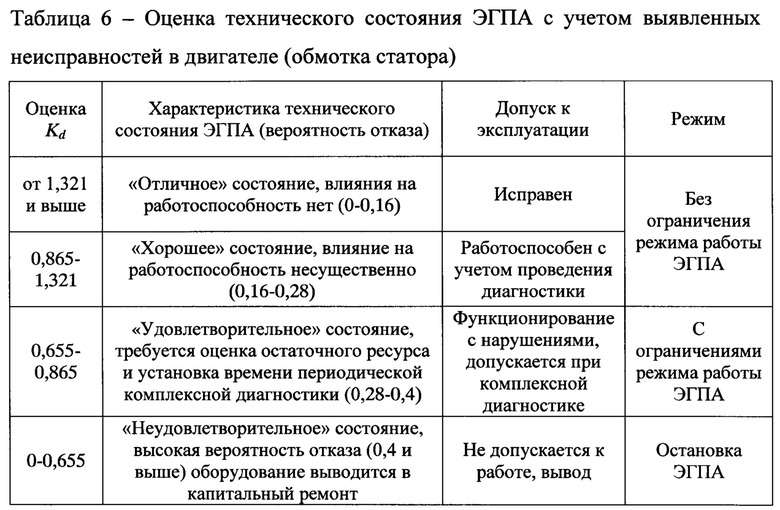
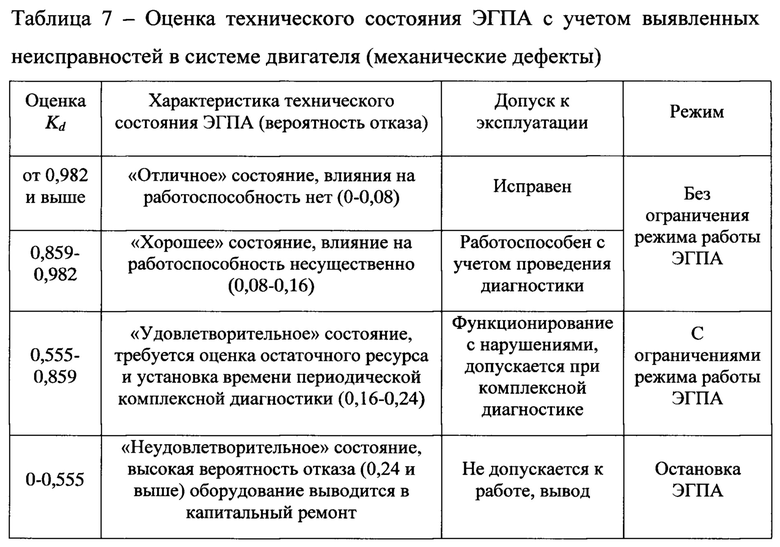
Оценка технического состояния ЭГПА возможна с учетом разработанной шкалы оценивания по каждой из подсистем диагностирования с учетом выявленных состояний (кластеров) Si для системы смазки, нагнетателя, двигателя (обмотка статора), механических дефектов, исправного состояния на основе выявленного общего количества возможного состояния дефектов с учетом ИНС Кохонена-2 и расчета расстояния Kd до центра ближайшего (р-го) кластера (прецедента).
Далее производилась оценка вероятности pi наступления события с учетом выявленных состояний ЭГПА (неблагоприятных) и количества возможных состояний (выигрышных). Были получены шкалы оценивания технического ЭГПА с учетом оценки вероятностей по кластерам (таблицы 4-7).
После оценки расстояния до центра ближайшего кластера, оценки вероятности отказа с учетом всех выявленных неисправных состояний для соответствующего класса (подсистемы диагностирования) ЭГПА и оценки вероятности отказа с учетом «выигрышных» состояний с помощью ИНС Кохонена-2, расчета нагрузки для ЭГПА принимается решение последующего допуска к эксплуатации, то есть соответствующий сигнал с блока 24 поступает в блок выбора режима диагностирования 25, который формирует информацию о наиболее целесообразном режиме диагностирования определенной подсистемы ЭГПА, далее сигнал поступает в микропроцессор 8, тем самым воздействуя на систему управления ЭГПА 9, устанавливая режим работы агрегата (без ограничения режима работы ЭГПА, с ограничениями режима работы ЭГПА, остановка ЭГПА) с учетом оценки технического состояния ЭГПА.



Изобретение относится к диагностике состояния электроприводных устройств. Способ управления режимами на основе нейросетевого диагностирования неисправностей и технического состояния электроприводного газоперекачивающего агрегата включает измерение параметров, сбор информации и проверку ее достоверности, фильтрацию измерений, проверку измерений, корректировку показаний измерений, сверку с ограничениями, вычисление признаков оперативного диагностирования, распознавание неисправностей и расчет отклонений. Вычисление признаков оперативного диагностирования и распознавание неисправностей осуществляют с учетом алгоритмов, основанных на работе двух нейронных сетей типа Кохонена, на основе которых рассчитывают и оценивают коэффициенты неисправностей по подсистемам: смазки, нагнетателя, обмотки статора и механических дефектов электродвигателя. Затем оценивают техническое состояние на основании полученных значений коэффициентов и выбирают режим диагностирования и управления. Повышается точность диагностики. 2 ил., 7 ил.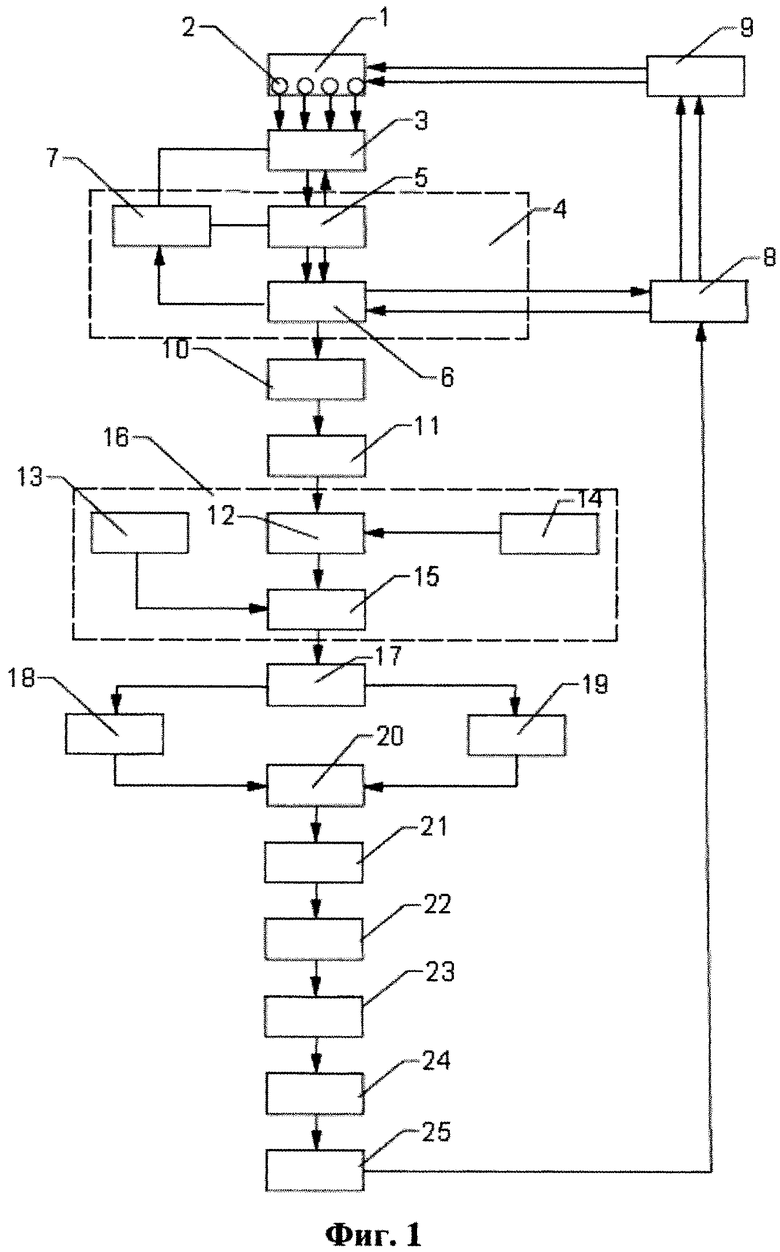
Способ управления режимами на основе нейросетевого диагностирования неисправностей и технического состояния электроприводного газоперекачивающего агрегата (ЭГПА), включающий измерение параметров с помощью датчиков контролируемых параметров, сбор информации как непосредственно, так и через регистратор наработки, проверку достоверности информации, фильтрацию измерений с отбрасыванием выпадающих точек, проверку однородности наблюдений и оценки значимости изменения значений параметров с использованием статистических критериев, самопроверку измерений при изменении режима работы агрегата, корректировку показаний измерений, сверку с ограничениями, приведение параметров, усреднение измерений, вычисление признаков оперативного диагностирования по специальным алгоритмам, распознавание неисправностей, представляющее методом сравнения отклонений показаний с низшим пороговым значением и с предельно допустимым отклонением согласно диагностической модели по соответствующей неисправности, расчета относительных отклонений, поступающих в микропроцессор управления, с последующей оптимизацией режима функционирования и выбора режима диагностирования агрегата, отличающийся тем, что вычисление признаков оперативного диагностирования и распознавание неисправностей осуществляют с учетом алгоритмов, основанных на работе двух искусственных нейронных сетей типа Кохонена, на основе которых рассчитывают и оценивают коэффициенты неисправностей для ЭГПА по подсистемам диагностирования, например подсистемы смазки, нагнетателя, обмотки статора для электродвигателя, механических дефектов для электродвигателя, после чего производят оценку технического состояния ЭГПА на основании полученных значений коэффициентов, учитывающих проявление неисправностей для ЭГПА, и производят выбор режима диагностирования и управления ЭГПА.
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2445598C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТЕХНОЛОГИЧЕСКИХ СОСТОЯНИЙ И НАРУШЕНИЙ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 2003 |
|
RU2242540C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОЙ УСТАНОВКИ, СОДЕРЖАЩЕЙ МНОЖЕСТВО СИСТЕМ, В ЧАСТНОСТИ УСТАНОВКИ ЭЛЕКТРОСТАНЦИИ | 2003 |
|
RU2313815C2 |
| US 6353815 B1, 05.03.2002. | |||

