УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее раскрытие изобретения относится к оцениванию поверхностных данных.
[0002] Геодезические измерения предоставляют информацию о поверхности Земли. Например, измерения Системы глобального позиционирования (GPS) могут предоставить трехмерные координаты (например, долготу, широту и высоту) для местоположений на поверхности Земли, Интерференционный радиолокатор с синтезированной апертурой (InSAR) может предоставить изменение в данных положения для местоположений на поверхности Земли, и измерения уклономера могут предоставить данные наклона (например, указывающие изменение в градиенте высоты) для местоположений на поверхности Земли. В некоторых случаях геодезические измерения во времени могут использоваться для обнаружения временных изменений на поверхности Земли. Анализ временных изменений на поверхности Земли может предоставить информацию о подземных структурах, ресурсах и событиях, возникающих под поверхностью Земли.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Данное описание изобретения описывает технологии, относящиеся к оцениванию поверхностных данных.
[0004] В общем виде геодезические данные используются для идентификации временных изменений в высотах поверхности и/или градиентах поверхности. В некоторых случаях идентифицированные изменения в высоте поверхности и/или идентифицированные изменения в градиенте поверхности могут использоваться вместе с геодезическими данными для формирования модели поверхностной деформации некой географической области.
[0005] В некоторых особенностях способы, системы, устройство и компьютерные программы, кодированные на запоминающих устройствах компьютера, конфигурируются для выполнения операций для оценивания поверхностных данных. Принимаются геодезические данные для множества местоположений на поверхности. Геодезические данные могут включать в себя информацию о градиенте поверхности и/или информацию о высоте поверхности для нескольких местоположений на поверхности. На основе геодезических данных формируется набор ограничивающих соотношений. Набор ограничивающих соотношений соотносит неопределенные значения перемещения высоты поверхности и/или неопределенные значения перемещения градиента поверхности с измеренными изменениями высоты поверхности и/или измеренными изменениями градиента поверхности. Некоторые или все ограничивающие соотношения включают в себя несколько неопределенных значений. Конкретные значения для перемещений высоты поверхности и/или конкретные значения для перемещений градиента поверхности вычисляются для нескольких местоположений на поверхности на основе определения решения набора ограничивающих соотношений. В некоторых реализациях поверхность минимальной кривизны может формироваться детерминировано на основе геодезических данных и конкретных значений, идентифицированных с использованием ограничивающих соотношений.
[0006] Реализации могут включать в себя один или несколько следующих признаков. Геодезические данные включают в себя информацию о высоте поверхности для первого подмножества местоположений на поверхности и информацию о градиенте поверхности для второго подмножества местоположений на поверхности. Набор ограничивающих соотношений соотносит неопределенные значения для временных изменений в градиентах поверхности в первом подмножестве местоположений на поверхности и неопределенные значения для временных изменений в высотах поверхности во втором подмножестве местоположений на поверхности с информацией о высоте поверхности и информацией о градиенте поверхности, включенных в геодезические данные. Идентификация конкретных значений для временных изменений в высоте поверхности в каждом местоположении на поверхности в подмножестве включает в себя идентификацию конкретных значений для временных изменений в градиенте поверхности в каждом из первого подмножества местоположений и конкретных значений для временных изменений в высоте поверхности в каждом из второго подмножества местоположений на поверхности. Геодезические данные включают в себя информацию о градиенте поверхности и информацию о высоте поверхности для третьего подмножества местоположений на поверхности, и набор ограничивающих соотношений включает в себя информацию о градиенте поверхности и информацию о высоте поверхности для третьего подмножества местоположений на поверхности. Каждое из нескольких неопределенных значений включается в несколько разных ограничивающих соотношений. Каждое из ограничивающих соотношений, которое включает в себя несколько неопределенных значений, взятое отдельно, ограничивает без определения неопределенных значений в соотношении.
[0007] Дополнительно или в качестве альтернативы реализации могут включать в себя один или несколько следующих признаков. Набор ограничивающих соотношений включает в себя систему линейных соотношений. Идентификация конкретных значений градиента поверхности (то есть конкретных значений для временных изменений в градиенте поверхности) для первого подмножества местоположений и конкретных значений высоты поверхности (то есть конкретных значений для временных изменений в высоте поверхности) для второго подмножества местоположений включает в себя решение системы линейных соотношений для конкретных значений градиента поверхности и конкретных значений высоты поверхности. Формирование набора ограничивающих соотношений включает в себя формирование одной или нескольких матриц. Решение набора ограничивающих соотношений включает в себя обращение одной или нескольких матриц. Идентификация конкретных значений высоты поверхности и конкретных значений градиента поверхности включает в себя решение набора ограничивающих соотношений на основе исключения по Гауссу или исключения по Гауссу-Жордану.
[0008] Дополнительно или в качестве альтернативы реализации могут включать в себя один или несколько следующих признаков. Геодезические данные включают в себя информацию о координатах поверхности для каждого из местоположений на поверхности. Соседние пары местоположений на поверхности идентифицируются на основе координат поверхности. Соседние пары местоположений на поверхности идентифицируются на основе формирования триангуляции Делоне местоположений на поверхности. Триангуляция Делоне включает в себя соединительные линии Делоне между каждой из соседних пар местоположений на поверхности. Каждое из ограничивающих соотношений основывается на геодезических данных для соседней пары местоположений на поверхности.
[0009] Дополнительно или в качестве альтернативы реализации могут включать в себя один или несколько следующих признаков. Ограничивающее соотношение ограничивает значения изменений в градиентах поверхности в соседней паре местоположений на поверхности значениями, которые приводят к минимальной кривизне поверхности между соседней парой местоположений. Ограничивающее соотношение ограничивает значения изменений в высотах поверхности в соседней паре местоположений на поверхности изменением в высоте низшего порядка. Расстояние между парой местоположений на поверхности можно представить в виде l на основе координат поверхности у местоположений на поверхности. Для каждой соседней пары местоположений на поверхности, где геодезические данные включают в себя значение t1 для временного изменения в градиенте поверхности в первой точке в соседней паре и значение t2 для временного изменения в градиенте поверхности во второй точке в соседней паре, набор ограничивающих соотношений ограничивает неопределенное значение h1 для временного изменения в высоте поверхности в первой точке и неопределенное значение h2 для временного изменения в высоте поверхности во второй точке с помощью соотношения вида  . Для каждой соседней пары, где геодезические данные включают в себя значение h1 для временного изменения в высоте поверхности в первой точке в соседней паре и значение t2 для временного изменения в градиенте поверхности во второй точке в соседней паре, набор ограничивающих соотношений ограничивает неопределенное значение t1 для временного изменения в градиенте поверхности в первой точке и неопределенное значение h2 для временного изменения в высоте поверхности во второй точке с помощью соотношения вида
. Для каждой соседней пары, где геодезические данные включают в себя значение h1 для временного изменения в высоте поверхности в первой точке в соседней паре и значение t2 для временного изменения в градиенте поверхности во второй точке в соседней паре, набор ограничивающих соотношений ограничивает неопределенное значение t1 для временного изменения в градиенте поверхности в первой точке и неопределенное значение h2 для временного изменения в высоте поверхности во второй точке с помощью соотношения вида  . Для каждой соседней пары, где геодезические данные включают в себя значение h1 для временного изменения в высоте поверхности в первой точке в соседней паре и значение h2 для временного изменения в высоте поверхности во второй точке в соседней паре, набор ограничивающих соотношений ограничивает неопределенное значение t1 для временного изменения в градиенте поверхности в первой точке и неопределенное значение t2 для временного изменения в градиенте поверхности во второй точке с помощью соотношения вида
. Для каждой соседней пары, где геодезические данные включают в себя значение h1 для временного изменения в высоте поверхности в первой точке в соседней паре и значение h2 для временного изменения в высоте поверхности во второй точке в соседней паре, набор ограничивающих соотношений ограничивает неопределенное значение t1 для временного изменения в градиенте поверхности в первой точке и неопределенное значение t2 для временного изменения в градиенте поверхности во второй точке с помощью соотношения вида  .
.
[0010] Дополнительно или в качестве альтернативы реализации могут включать в себя один или несколько следующих признаков. Параметры кривых высот между соседними парами местоположений на поверхности определяются на основе принятых геодезических данных, конкретных значений градиента поверхности (то есть конкретных значений для временных изменений в градиенте поверхности в первом подмножестве местоположений на поверхности) и конкретных значений высоты поверхности (то есть конкретных значений для временных изменений в высоте поверхности во втором подмножестве местоположений на поверхности). Каждая кривая высоты представляет поверхностную деформацию между соседней парой местоположений на поверхности. Местоположения на поверхности соответствуют области на поверхности Земли, и способ дополнительно включает в себя вычисление временных изменений в высоте для других местоположений на поверхности в той области на основе параметров одной или нескольких кривых высот. Определение параметров кривых высот включает в себя формирование конкретных значений коэффициентов для членов полиномиальных кривых высот. Полиномиальные кривые высот могут включать в себя полиномы третьего порядка. Конкретные значения коэффициентов для членов полиномиальных кривых высот соответствуют поверхности минимальной кривизны. Конкретные значения коэффициентов соответствуют единственной поверхности минимальной кривизны для конкретных значений градиента поверхности, конкретных значений высоты поверхности и измеренных значений высоты и градиента в геодезических данных. Графическое представление географической поверхностной деформации может формироваться на основе полиномиальных кривых высот. Географическая поверхностная деформация может представлять изменение в форме географической поверхности за заданный период времени. Географическую поверхностную деформацию можно сопоставить с полевыми работами, ассоциированными с географической областью и периодом времени.
[0011] Дополнительно или в качестве альтернативы реализации могут включать в себя один или несколько следующих признаков. Геодезические данные могут храниться в базе данных, и одна или несколько операций могут выполняться с помощью устройства обработки данных. Измерительная подсистема может получать геодезические данные для нескольких местоположений измерения, которые соответствуют местоположениям на поверхности, представленным в геодезических данных. Измерительная подсистема включает в себя массив уклономеров, который формирует информацию о градиенте поверхности. Измерительная подсистема включает в себя систему GPS и/или InSAR, которая формирует информацию о высоте поверхности. Одно или несколько местоположений на поверхности соответствуют местоположению измерения у станции-уклономера. Одно или несколько местоположений на поверхности соответствуют местоположению измерения у приемника GPS и/или местоположению измерения у системы InSAR. Измерения градиента поверхности могут включать в себя данные уклономера от массива уклономеров на некой площади в географической области, а измерения высоты поверхности могут включать в себя данные InSAR для другой площади за периметром массива уклономеров.
[0012] Дополнительно или в качестве альтернативы реализации могут включать в себя один или несколько следующих признаков. Геодезические данные включают в себя геодезические данные для множества периодов времени. Набор ограничивающих соотношений формируется для каждого из множества периодов времени. Ограничивающее соотношение для каждого периода времени решается для идентификации временных изменений в высоте поверхности и/или временных изменений в градиенте поверхности за период времени. Модели географической поверхностной деформации формируются для каждого периода времени.
[0013] Одна или несколько реализаций предмета изобретения, описанных в данном описании изобретения, могут быть реализованы для осуществления одного или нескольких следующих преимуществ. Модель поверхности может формироваться за меньшее время и детерминированным способом. Например, одна или несколько методик, описанных в этом документе, могут использоваться для формирования поверхности минимальной кривизны быстрее, чем она была бы сформирована с использованием некоторых традиционных методик, которые опираются на стохастические алгоритмы. Увеличенная скорость вычисления может позволить выполнять вычисления с более мелким масштабом времени, так что решения можно представлять ближе к реальному масштабу времени и с большей временной детализацией. По существу, увеличенная скорость вычисления может позволить более точное сопоставление поверхностной деформации с полевыми работами. Модель поверхности может формироваться на основе геодезических данных, которые включают в себя только информацию о высоте поверхности или только информацию о градиенте поверхности для нескольких местоположений на поверхности. Например, одна или несколько раскрытых методик могут использоваться для формирования поверхности минимальной кривизны на основе геодезических данных, которые включают в себя данные InSAR для местоположений на поверхности вне географической области, охваченной массивом уклономеров. Интеграция данных уклономера с данными InSAR вне массива уклономеров может позволить более полный анализ поверхностной деформации без сравнения решения с уклономером с полученными из InSAR измерениями.
[0014] Подробности одного или нескольких вариантов осуществления предмета изобретения, описанных в этом описании изобретения, излагаются в прилагаемых чертежах и описании ниже. Другие признаки, особенности и преимущества предмета изобретения станут очевидными из описания, чертежей и формулы изобретения.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Фиг.1A - схематическое представление, показывающее примерную систему оценки поверхности.
[0016] Фиг.1B - схематическое представление, показывающее примерные точки геодезических данных и соединительные линии, сформированные системой 100 оценки поверхности, показанной на Фиг.1A.
[0017] Фиг.2 - схематическое представление, показывающее примерные точки геодезических данных и соединительные линии.
[0018] Фиг.3 - блок-схема алгоритма, показывающая примерный процесс для оценивания поверхностных данных.
[0019] Фиг. 4A и 4B - схемы, показывающие примерные модели поверхностной деформации.
[0020] Фиг.5 - схематическое представление, показывающее особенности примерной вычислительной системы.
[0021] Одинаковые символы ссылок на различных чертежах указывают одинаковые элементы.
ПОДРОБНОЕ ОПИСАНИЕ
[0022] Фиг.1A - схематическое представление, показывающее примерную систему 100 оценки поверхности. Примерная система 100 оценки поверхности на Фиг.1A включает в себя измерительную подсистему 101 и вычислительную подсистему 103. В некоторых реализациях система оценки поверхности может включать в себя дополнительные и/или другие признаки, компоненты и/или подсистемы. На верхнем уровне измерительная подсистема 101 выполняет измерения для получения информации о географической поверхности 111 в географической области 102, и информация, полученная измерительной подсистемой 101, обрабатывается вычислительной подсистемой 103 для оценки, анализа и/или моделирования особенностей географической области 102. В некоторых случаях компоненты и подсистемы системы 100 оценки поверхности могут выполнять дополнительные и/или другие типы функций.
[0023] В некоторых реализациях вычислительная подсистема 103 может вычислять как можно более ровную поверхность из измерений высоты поверхности, измерений градиента поверхности и/или измерений высоты поверхности и градиента поверхности в каждом местоположении на поверхности. Некоторые традиционные методики требуют информацию о высоте и градиенте в каждом местоположении на поверхности. Такие традиционные методики обычно не применяют данные InSAR из областей поверхности значительно за пределами массива уклономеров. Такие традиционные методики используют стохастические алгоритмы, которые могут быть продолжительными и неопределенными в том, что последующие итерации могут давать разные результаты. Вычислительная подсистема 103 может детерминировано формировать поверхность минимальной кривизны на основе данных InSAR, данных уклономера и данных GPS для нескольких местоположений на поверхности в любом сочетании, которая может включать в себя точки данных, содержащие только данные о высоте поверхности, только данные о градиенте поверхности или данные о высоте и градиенте. Вычислительная подсистема 103 может формировать решение быстрее некоторых традиционных систем. В некоторых случаях бесконечное количество разных поверхностей можно было бы теоретически подобрать для набора измерений высоты поверхности и градиента поверхности, и может быть желательно сформировать соответствие, имеющее практически минимальную кривизну. Например, может быть желательно сформировать поверхность, которая показывает наименьшую кривизну и соответствует наименее сложной поверхности, которая удовлетворяет измерениям. В некоторых случаях кривизна поверхности может оцениваться путем суммирования кривизны кривых высот, определяющих поверхность.
[0024] Географическая область 102 включает в себя географическую поверхность 111 и подземную область 104 под поверхностью 111. Подземная область 104 может включать в себя различные слои горной породы и/или другие структуры. С целью иллюстрации на Фиг.1A показаны два примерных слоя 106, 108. Как правило, подземная область 104 может включать в себя любое количество слоев и/или других типов геологических структур, которые могут иметь любую топографическую форму, толщину и/или геометрию. Например, подземная область 104 может включать в себя один или несколько слоев горной породы, обладающих различными степенями пористости, проницаемости и/или проводимости, и подземные структуры могут включать в себя сдвиги, разломы, трещины и/или другие типы естественных или искусственно образованных неоднородностей. В некоторых реализациях подземная область 104 может содержать углеводородные ресурсы (например, природный газ, нефть, уголь и т.п.), пластовую воду и/или другие типы ресурсов в пласте. Например, подземный пласт может включать в себя традиционные и/или нетрадиционные пласты.
[0025] В некоторых реализациях географическая область 102 включает в себя всю или часть одной или нескольких скважин (не показаны). Например, система скважин в географической области 102 может включать в себя одну или несколько из скважин-открывательниц, контрольных скважин, нагнетательных скважин, эксплуатационных скважин и/или других типов скважин. Система скважин может включать в себя одиночный ствол скважины или несколько стволов скважины, которые могут включать в себя стволы скважины, имеющие вертикальную, горизонтальную, наклонную, искривленную и/или другие типы геометрии. Подземная область 104 может включать в себя жидкости, введенные через одну или несколько нагнетательных скважин и/или искусственно образованных трещин, сформированных путем нагнетания жидкости. В некоторых случаях в стволе скважины могут устанавливаться один или несколько датчиков или других измерительных устройств. По существу, измерительная подсистема 101 может включать в себя один или несколько скважинных компонентов, расположенных в стволе скважины под поверхностью 111.
[0026] Измерительная подсистема 101 включает в себя станции-уклономеры 112 в массиве уклономеров на географической поверхности 111, приемники 114 GPS в сети GPS на географической поверхности 111 и спутники 120 телеметрии InSAR. Измерительная подсистема 101 может включать в себя дополнительные и/или другие компоненты, измерительные устройства, подсистемы и/или другие признаки. Например, измерительная подсистема 101 может включать в себя другие типы измерительных систем, например, воздушный InSAR, лазерную локацию, лазерное нивелирование, геодезическую съемку и/или другие типы систем. Компоненты измерительной подсистемы 101 могут располагаться и/или конфигурироваться показанным способом или иным способом. Например, измерительная подсистема обычно может включать в себя любое количество станций-уклономеров 112, любое количество приемников 114 GPS и/или другие типы измерительных устройств в любом типе геометрического или схематического расположения.
[0027] Каждый из приемников 114 GPS принимает сигналы от спутников GPS и получает измерения пространственных координат поверхности. Например, каждый из приемников 114 GPS может получать измерение положения периодически, на основе заранее установленных событий, на основе команд и/или на основе других критериев. Измерения GPS могут указывать высоту поверхности в местоположениях приемников 114 GPS. Измерения положения, предоставленные приемниками 114 GPS, могут включать в себя три независимые пространственные координаты, временную координату и/или другую информацию. Например, измерения положения могут указывать высоты поверхности и координаты поверхности (например, продольные и поперечные координаты) для каждого из местоположений приемников 114 GPS на поверхности. Измерения GPS для двух разных моментов времени могут указывать измеренное временное изменение по высоте в данном местоположении на поверхности.
[0028] Спутники 120 InSAR и/или самолетная система InSAR используют телеметрию прямой видимости для получения трехмерных измерений поверхности. Например, данные InSAR из одного или нескольких направлений визирования могут использоваться для формирования трехмерных измерений поверхности. Спутники 120 InSAR передают электромагнитные сигналы, которые взаимодействуют с поверхностью 111. По меньшей мере часть сигналов отражается от поверхности 111 и принимается спутниками 120, и принятые сигналы могут использоваться для формирования измерений изменений высоты поверхности со временем для одного или нескольких местоположений на поверхности 111. Измерения InSAR можно получать периодически, на основе заранее установленных событий, на основе команд и/или на основе других критериев. Измерения InSAR могут указывать изменения высот поверхности со временем в любом местоположении на поверхности, для которого спутники InSAR или самолетные системы InSAR могут получить измерение прямой видимости. Измерения, предоставленные системами InSAR, могут включать в себя три независимые пространственные координаты, одну или несколько координат и/или другую информацию. Например, измерения положения могут указывать временные изменения в высотах поверхности и координатах поверхности (например, продольных и поперечных координатах) для различных местоположений на поверхности 111.
[0029] Станции-уклономеры 112 получают измерения градиента поверхности. Измерения градиента поверхности соответствуют временному изменению в уклоне или "наклоне" географической поверхности 111 в местоположении станции-уклономера 112. Градиент поверхности можно представить как безразмерную величину, которая указывает вертикальное изменение высоты с боковым расстоянием, и/или градиент поверхности можно представить как угловую величину, которая указывает угол поверхности относительно одного или нескольких опорных направлений. Градиент поверхности может быть векторной величиной, которая включает в себя направленную составляющую. Например, станция-уклономер может измерить градиент поверхности в "северном" направлении, градиент поверхности в "восточном" направлении и/или градиент поверхности в одном или нескольких других направлениях. Каждая из станций-уклономеров 112 может получать измерение градиента периодически, на основе заранее установленных событий, на основе команд и/или на основе других критериев. Измерения градиента, предоставленные станциями-уклономерами 112, могут включать в себя координаты местоположения на поверхности, одно или несколько значений градиента поверхности и идентификацию направлений градиента, одну или несколько временных координат и/или другую информацию. Например, измерения градиента могут указывать величины градиента поверхности, направления градиента поверхности, период времени для измерения и координаты поверхности (например, продольные и поперечные координаты) для местоположений станций-уклономеров 112 на поверхности. Измерения уклономера могут указывать измеренное временное изменение в градиенте поверхности в данном местоположении на поверхности.
[0030] В показанном на Фиг.1A примере станции-уклономеры 112 и приемники 114 GPS находятся в области 110 на географической поверхности 111. Приемники 114 GPS могут быть разбросаны между станциями-уклономерами 112. Таким образом, приемники 114 GPS могут получать данные о высоте поверхности для первого набора местоположений на поверхности, а станции-уклономеры 112 могут получать данные о градиенте поверхности для второго, отличного набора местоположений на поверхности. В некоторых реализациях один или несколько приемников 114 GPS могут находиться практически в одном местоположении со станцией-уклономером 112. Таким образом, приемник 114 GPS и станция-уклономер могут получать данные о высоте поверхности и данные о градиенте поверхности для практически одинакового местоположения на поверхности. В некоторых реализациях один или несколько приемников 114 GPS могут находиться на значительном удалении от массива уклономеров, например, вне области 110. Область 110 может быть областью любого размера, формы или геометрии. В некоторых случаях станции-уклономеры 112 и/или приемники 114 GPS простираются на площади от 0,1 до 0,3 квадратных миль, и в некоторых случаях область может быть меньше (например, меньше 0,1 квадратной мили) или больше (например, вплоть до двух квадратных миль или больше).
[0031] Обычно измерительная подсистема 101 может включать в себя любое количество станций-уклономеров 112 и приемников 114 GPS. В некоторых примерных реализациях область 110 на географической поверхности 111 может включать в себя от двадцати (20) до двухсот (200) станций-уклономеров 112 и от двух (2) до пяти (5) приемников 114 GPS. В некоторых реализациях приемники 114 GPS не используются. В некоторых реализациях измерительная система 100 включает в себя большее количество станций-уклономеров 112 и/или большее количество приемников 114 GPS. В некоторых реализациях станции-уклономеры 112 и/или приемники 114 GPS обычно организованы в сеточном расположении на поверхности 111. В некоторых реализациях станции-уклономеры 112 и/или приемники 114 GPS размещаются иным образом (например, по радиальному, линейному, случайному и/или другим типам шаблонов). Местоположения станций-уклономеров 112 и/или приемников 114 GPS могут выбираться на основе местоположений географических особенностей, местоположений подземных особенностей, местоположений другой инфраструктуры и оборудования связи и/или других факторов. Данные могут собираться из некоторых или всех местоположений на поверхности одновременно или в несколько разных моментов.
[0032] В некоторых случаях спутники 120 InSAR могут собирать данные о высоте практически на всей географической поверхности 111. Например, спутники 120 InSAR могут собирать данные о высоте в местоположениях на поверхности внутри области 110, и спутники 120 InSAR могут собирать данные о высоте в дополнительных местоположениях на поверхности вне периметра массива уклономеров. По существу, данные о высоте, сформированные измерительной подсистемой 101, могут включать в себя информацию о высоте поверхности для большого количества точек данных внутри и вне массива уклономеров. Таким образом, геодезические данные, сформированные измерительной подсистемой 101, могут включать в себя информацию о высоте поверхности без информации о градиенте поверхности для одного или нескольких местоположений на поверхности 111, информацию о градиенте поверхности без информации о высоте поверхности для одного или нескольких местоположений на поверхности 111, информацию о высоте поверхности и информацию о градиенте поверхности для одного или нескольких местоположений на поверхности 111, включая любое сочетание.
[0033] Измерительная подсистема 101 измеряет временные изменения географической поверхности 111. Например, информация о высоте поверхности, предоставленная измерительной подсистемой 101, может включать в себя измерения временных изменений в высоте поверхности (например, на основе измерений приемниками 114 GPS, спутниками 120 InSAR и/или другими измерительными устройствами), и информация о градиенте поверхности, предоставленная измерительной подсистемой 101, может включать в себя измерения временных изменений в градиенте поверхности (например, на основе измерений станциями-уклономерами 112 и/или другими измерительными устройствами). Временные изменения могут измеряться за любой период времени. В некоторых случаях каждое измерительное устройство измеряет временные изменения географической поверхности 111 за периоды из секунд, минут, часов, дней, недель, месяцев, лет или сочетание этих периодов. Временные изменения могут отслеживаться в течение периода времени, ассоциированного с полевыми работами (например, до, во время и/или после полевых работ), чтобы наблюдать воздействия полевых работ на географическую поверхность 111, если это имеет место. Временное изменение в высоте поверхности указывает соотношение между высотой поверхности для двух разных моментов времени и не обязательно указывает разность в высоте поверхности в двух моментах времени. Другими словами, в некоторых случаях измеренное временное изменение в высоте поверхности может быть нулем. Аналогичным образом временное изменение в градиенте поверхности указывает соотношение между градиентом поверхности для двух разных моментов времени и не обязательно указывает разность в градиенте поверхности в двух моментах времени. Другими словами, в некоторых случаях измеренное временное изменение в градиенте поверхности может быть нулем.
[0034] Вычислительная подсистема 103 включает в себя системы, устройства и/или компоненты обработки данных, которые могут хранить и обрабатывать информацию, полученную измерительной подсистемой 101. Например, вычислительная подсистема 103 может включать в себя примерную вычислительную систему 500, показанную на Фиг.5, и/или дополнительные или другие типы систем и устройств. Структура и работа примерной вычислительной системы 500 подробнее обсуждается по отношению к Фиг.5 ниже. Вычислительная подсистема 103 может включать в себя несколько компонентов в одном местоположении и/или в нескольких разных местоположениях. Некоторые или все компоненты вычислительной подсистемы 103 могут располагаться удаленно от географической области 102, и/или вычислительная подсистема 103 может включать в себя компоненты, расположенные в измерительной системе 102 или вблизи нее в географической области 102.
[0035] Вычислительная подсистема 103 может включать в себя и/или взаимодействовать с системами и инфраструктурой связи. Например, вычислительная подсистема 103 может взаимодействовать с одной или несколькими сетями передачи данных (например, Интернет, частная сеть передачи данных и т.п.), телекоммуникационными сетями, проводными или беспроводными линиями связи и/или другими типами интерфейсов для приема данных измерений от измерительной подсистемы 101. В некоторых реализациях часть или все данные измерений и/или связанная информация могут доставляться в вычислительную подсистему 103 на машиночитаемом носителе, например диске, накопителе на дисках, портативном запоминающем устройстве и/или другом типе устройства.
[0036] Вычислительная подсистема 103 может включать в себя компьютерное программное обеспечение, приложения, модули, коды, функции и/или другие типы компьютерных программ, которые оценивают поверхностные данные, предоставленные измерительной подсистемой 101. Например, вычислительная подсистема 103 может анализировать поверхностные данные путем выполнения одной или нескольких операций в процессе 300, показанном на Фиг.3. В некоторых примерных реализациях вычислительная подсистема 103 обрабатывает геодезические данные и формирует кривые высот по соединительным линиям между точками данных, соответствующими местоположениям измерений поверхности.
[0037] Фиг.1B - схематическое представление 150, показывающее примерные точки геодезических данных и соединительные линии, которые могут формироваться системой 100 оценки поверхности, показанной на Фиг.1A. Квадраты на схеме 150 представляют примерные точки данных о высоте поверхности, которые соответствуют местоположениям на поверхности, для которых информация о высоте поверхности получается измерительной подсистемой 101 (например, приемниками 114 GPS, спутниками 120 InSAR и т. п.). Окружности на схеме 150 представляют примерные точки данных о градиенте поверхности, которые соответствуют местоположениям, для которых информация о градиенте поверхности получается измерительной подсистемой 101. На схеме 150 отмечены три из точек 152a, 152b, 152c данных о высоте поверхности и две из точек 154a, 154b данных о градиенте поверхности. Точки геодезических данных могут соответствовать местоположениям измерения на географической поверхности 111, для которых информация о градиенте поверхности и/или информация о высоте поверхности получена измерительной подсистемой 101.
[0038] Вычислительная подсистема 103 может принимать точки геодезических данных в качестве входных данных и формировать соединительные линии между парами точек данных. В некоторых реализациях соединительные линии могут соответствовать линиям Делоне, сформированным с помощью триангуляции точек данных по Делоне. Соединительные линии могут формироваться с помощью дополнительных и/или других методик. На схеме 150 показаны три примерные соединительные линии 156a, 156b и 156c. Вычислительная подсистема 103 может формировать кривую высоты поверхности для каждой из соединительных линий на схеме 150. Кривая высоты поверхности представляет поверхностную деформацию со временем в местоположениях на поверхности по соединительной линии. Кривая высоты поверхности между двумя точками данных может формироваться частично на основе значений временных изменений высоты поверхности и временных изменений градиента поверхности в двух точках данных.
[0039] Так как по меньшей мере в некоторых случаях (которые показаны, например, на Фиг.1B) геодезические данные, принятые от измерительной подсистемы 101, не включают в себя информацию о высоте и градиенте для всех местоположений на поверхности, вычислительная подсистема 103 может вычислить значения высоты поверхности (то есть временные изменения в высоте поверхности) для местоположений на поверхности, где измерительная подсистема 101 не измеряла высоту поверхности (например, точки 154a, 154b данных о градиенте поверхности и т.д.), и/или вычислительная подсистема 103 может вычислить значения градиента поверхности (то есть временные изменения в градиенте поверхности) для местоположений на поверхности, где измерительная подсистема 101 не измеряла градиент поверхности (например, точки 156a, 156b, 156c данных о высоте поверхности и т. д.). Неизмеренные значения могут вычисляться путем решения системы ограничивающих уравнений, где ограничивающие уравнения формируются на основе соотношений между соседними парами местоположений на поверхности. Система ограничивающих уравнений может включать в себя неопределенные переменные для высоты поверхности или градиента поверхности в некоторых или всех местоположениях на поверхности. Ограничивающие уравнения могут быть предназначены для формирования значений, которые приводят к поверхности минимальной кривизны на основе заданного набора входных данных. Примерные ограничивающие уравнения подробнее обсуждаются ниже в отношении Фиг.2 и 3.
[0040] После того, как значения высоты и градиента идентифицированы для местоположений на поверхности, вычислительная подсистема 103 может использовать значения высоты и градиента в каждой паре точек данных, чтобы вычислить параметры кривой высоты по соединительной линии между точками данных. Например, значения высоты и градиента могут использоваться для формирования коэффициентов для членов полинома третьего порядка по каждой соединительной линии. В некоторых случаях решение является набором кривых высот, соответствующим поверхности минимальной кривизны. Примеры вычисления параметров кривых высот между точками данных подробнее обсуждаются ниже в отношении Фиг.2 и 3. Кривые высот могут использоваться для вычисления высоты, кривизны поверхности и/или других свойств в дополнительных местоположениях на поверхности. Например, кривые высот можно интерполировать до декартовой сетки или другого предопределенного набора точек, чтобы сформировать модель поверхности. Модель поверхности представляет деформацию поверхности за некий период времени. Временные изменения, представленные на поверхности, могут использоваться для анализа подземных ресурсов и структур. Например, перемещение поверхности Земли может указывать перемещение жидкостей, сейсмические действия и/или другие типы событий в слоях 106, 108 под поверхностью Земли.
[0041] Фиг.2 - схематическое представление, показывающее примерные точки 201, 202, 203 геодезических данных и соединительные линии 210a, 210b, 210c. Точки 201, 202, 203 данных могут соответствовать измерениям, сформированным измерительной подсистемой 101 для трех местоположений на географической поверхности 111. Соединительные линии 210a, 210b, 210c могут соответствовать линиям Делоне, сформированным с помощью триангуляции местоположений на поверхности по Делоне. С целью объяснения ниже обсуждаются два примерных сценария со ссылкой на Фиг.2. Методики, описанные для анализа двух примерных сценариев, можно расширить на дополнительные и/или другие сценарии, которые могут включать в себя практически любое количество местоположений на поверхности и практически любое количество соединительных линий. Например, методики, описанные для анализа двух примерных сценариев, можно расширить для нахождения поверхности минимальной кривизны (то есть самой ровной поверхности) при некотором количестве точек данных на площади, где некоторые точки имеют входное измерение градиента поверхности, некоторые точки имеют входное измерение высоты поверхности, и некоторые точки имеют входные измерения высоты и градиента.
[0042] В первом сценарии все три точки 201, 202, 203 геодезических данных имеют измеренный градиент (то есть измерения временных изменений в градиентах поверхности за данный период времени). В этом сценарии точка 203 данных может использоваться в качестве реперной высоты. Для подбора с помощью сплайна, имеющего непрерывную вторую производную, кривую вида
можно назначить каждой из соединительных линий 210a, 210b, 210c, где переменная h представляет временное изменение высоты по соединительной линии за данный период времени, а переменная x представляет расстояние по линии между х=0 в одной из точек данных и х=1 в другой точке данных. Измеренные временные изменения в градиенте поверхности (представленном переменными t1, t2 и t3 для точек 201, 202, 203 данных соответственно) на концах каждой линии относятся к коэффициентам a, b и c из Уравнения 1 в соответствии с первой производной изменения h высоты относительно x:
[0043] Для начальной оценки в первом сценарии недостаточно информации для определения всех трех коэффициентов, поэтому может использоваться сплайн низшего порядка, допуская а=0. В некоторых случаях могут быть полезны другие допущения. Оценивание Уравнения 2 на граничных значениях x приводит к:
и
Из Уравнений 3 и 4 можно выразить кривую высоты из Уравнения 1
[0044] По каждой из соединительных линий Уравнение 5 предоставляет вычисление высоты низшего порядка. Разность высоты низшего порядка для соединительной линии 210c между точками 201 и 202 данных предоставляется с помощью ограничивающего уравнения
которое эквивалентно среднему измерений градиента, умноженному на длину соединительной линии. Ограничивающие уравнения могут формироваться для других соединительных линий 210a, 210b, и ограничивающие уравнения для каждой соединительной линии могут выражаться в матричной форме, где каждый столбец матрицы представляет одну из точек измерения, а каждая строка представляет одну из соединительных линий:
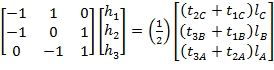
В Уравнении 7 выше переменные h1, h2 и h3 представляют неопределенные значения для временных изменений в высотах поверхности в точках 201, 202, 203 данных соответственно; переменные lA, lB и lC представляют длины соединительных линий 210a, 210b, 210c соответственно; переменная t1C представляет временное изменение в градиенте поверхности в точке 201 данных по направлению соединительной линии 210c; переменная t1B представляет временное изменение в градиенте поверхности в точке 201 данных по направлению соединительной линии 210b; переменная t2A представляет временное изменение в градиенте поверхности в точке 202 данных по направлению соединительной линии 210a; переменная t2C представляет временное изменение в градиенте поверхности в точке 202 данных по направлению соединительной линии 210c; переменная t3A представляет временное изменение в градиенте поверхности в точке 203 данных по направлению соединительной линии 210a; переменная t3B представляет временное изменение в градиенте поверхности в точке 203 данных по направлению соединительной линии 210b. В Уравнении 7 переменные с правой стороны имеют известные значения, указанные измеренными геодезическими данными. Поскольку матрица левой стороны имеет ранг 2, матрицу нельзя обратить. В этом сценарии включение измеренного значения или предполагаемого опорного значения высоты для точки 203 данных преобразует матрицу три-на-три в Уравнении 7 в матрицу, которая имеет ранг 2. Например, допущение h3=0 устраняет третий столбец матрицы левой стороны, и Уравнение 7 сокращается до:
[0045] Изменения в высоте (h1 и h2) в точках 201 и 202 могут вычисляться путем решения Уравнения 8. Например, (h1 и h2) можно вычислить в виде
где '\' в Уравнении 9 представляет псевдообратный оператор, который использует исключение по Гауссу для нахождения решения методом наименьших квадратов. Как правило, матричное уравнение, такое как Уравнение 8, можно решить на основе обращения крайней левой матрицы в уравнении. Исключение по Гауссу и исключение по Гауссу-Жордану являются примерами общеизвестных методик, которые формируют решение методом наименьших квадратов для матричного уравнения. Эти методики и/или другие методики могут использоваться для решения Уравнения 8.
[0046] Как только изменения высоты в местоположениях уклономеров оцениваются с использованием решения методом наименьших квадратов, неопределенные коэффициенты (a, b, c, d) в Уравнении 1 можно вычислить, например, на основе Уравнений 2, 3, 4 и 5 выше. Для соединительной линии 210a Уравнение 1 становится
 …
…

Уравнение 1 можно преобразовать в аналогичное уравнение кривой высоты для соединительных линий 210b и 210c в первом сценарии.
[0047] Переходя ко второму сценарию, вместо использования допущения h3=0, второй сценарий предполагает, что точка 203 данных имеет измеренное значение для временного изменения в высоте и неопределенное значение градиента. Другими словами, во втором сценарии только две из точек 201, 202 геодезических данных имеют измеренное перемещение градиента поверхности, и только одна из точек 203 данных имеет измеренное перемещение высоты поверхности. В примерном анализе для этого второго сценария вычисления аналогичны вычислениям в первом сценарии за исключением того, что градиент не измеряется в точке 203 данных, а измеряется высота точки 203. Временное изменение в градиенте поверхности в точке 203 представляется неопределенными значениями t3E и t3N, соответствующими градиенту поверхности в восточном и северном направлениях соответственно. В показанном на Фиг.2 примере только две соединительные линии 210a, 210b сходятся в точке 203, поэтому градиенты двух соединительных линий 210a, 201b нельзя считать независимыми. Во многих практических случаях будет иметь место большее количество линий, сходящихся во многих точках данных о высоте. Начиная с уравнений:
матричное уравнение можно расширить для учета измеренного значения изменения h3 высоты и неопределенных значений t3E и t3N для градиента:

[0048] В Уравнении 12 θ3A представляет угол соединительной линии 210a в точке 203 относительно севера, и θ3B представляет угол соединительной линии 210b в точке 203 относительно севера. Матрица левой стороны имеет ранг меньше 4, поэтому решение нельзя вычислить однозначно. Однако во многих ситуациях матрица будет иметь достаточно линейно-независимых строк, чтобы сделать возможным вычисление единственной подгонки методом наименьших квадратов. Для ситуаций, где это не так, как и здесь, один вариант состоит в дополнительном упрощении градиента в точке измеренного изменения высоты, например, путем допущения t3A=t2A и t3B=t1B. Это упрощает матричное уравнение до:
[0049] Это упрощение подтверждает, что входные данные не имеют единственного решения, поэтому градиент по месту высоты возвращается к наименее возможной кривизне, и оставшаяся часть решения вычисляется исходя из этого. Дополнительные и/или другие упрощения можно сделать в этой ситуации и/или в аналогичных или других ситуациях.
[0050] Методики, описанные по отношению к Фиг.2 для этих двух примерных сценариев, можно расширить для обработки практически любого набора точек данных. Например, вышеприведенные матрицы можно расширить дополнительными строками и столбцами, чтобы вместить десятки, сотни или тысячи местоположений на поверхности и соединительных линий, и любые соответствующие неопределенные переменные.
[0051] Фиг.3 - блок-схема алгоритма, показывающая примерный процесс 300 для оценивания поверхностных данных. Например, процесс 300 может использоваться для оценивания геодезических данных, собранных измерительной подсистемой 101 на Фиг.1. В некоторых реализациях процесс 300 может включать в себя больше, меньше и/или другие операции, выполненные в показанном порядке или в другом порядке. Кроме того, одна или несколько отдельных операций и/или подмножества операций в процессе 300 могут выполняться отдельно и/или в других контекстах для достижения аналогичного или другого результата. В некоторых реализациях одна или несколько операций в процессе 300 могут повторяться, пропускаться, изменяться и/или выполняться с помощью нескольких подопераций. Некоторые или все особенности процесса 300 можно реализовать с помощью устройства обработки данных, исполняющего машиночитаемые команды, которые могут включаться в одну или несколько компьютерных программ, модулей или приложений, сконфигурированных для предоставления описанных функциональных возможностей. Хотя процесс 300 обсуждается касательно определения значений временных изменений в высоте и/или временных изменений в градиенте за некий период времени на основе измерений временных изменений в высоте и/или временных изменений в градиенте за тот период времени, процесс 300 может использоваться для вычисления высот поверхности и/или градиентов поверхности для данного момента времени на основе измерений высоты и/или измерений градиента для данного момента времени.
[0052] В некоторых реализациях процесс 300 предоставляет детерминированное вычисление поверхности минимальной кривизны. Например, процесс 300 может быть реализован так, что всегда формируется один и тот же выход при одном и том же наборе входных геодезических измерений. Детерминированный подход может выполняться быстрее, например, по сравнению с некоторыми стохастическими подходами, которые формируют статистически значимое количество отдельных решений и усредняют их. Хотя детерминированный подход может обладать некоторыми преимуществами в некоторых реализациях, стохастические методики также могут быть полезны. В некоторых реализациях процесс 300 использует подгонку методом наименьших квадратов и/или родственные математические методики для вычисления высот поверхности и/или градиентов поверхности. По существу, процесс 300 может предоставлять оценки неопределенности на основе того, насколько хорошо решение методом наименьших квадратов подбирает вычисленные оценки кривизны низшего порядка.
[0053] На этапе 302 принимаются геодезические данные. Например, входные данные могут приниматься из локального запоминающего устройства, от удаленного устройства и/или иным образом. Геодезические данные могут включать в себя информацию о высоте поверхности, информацию о градиенте поверхности или сочетание информации о высоте поверхности и информации о градиенте поверхности в каждом из нескольких местоположений на поверхности. Каждое из местоположений на поверхности может соответствовать местоположению измерения, где было получено измерение. Например, геодезические данные могут включать в себя данные уклономера, данные InSAR, данные GPS и/или другие типы данных. Геодезические данные могут включать в себя измерения временных изменений в высотах поверхности и/или измерения временных изменений в градиентах поверхности за конкретный период времени (например, час, неделю, месяц, год и/или другой период времени) и/или за несколько периодов времени.
[0054] На этапе 304 идентифицируются пары точек данных. Соседние пары точек данных можно идентифицировать путем отыскания набора линий Делоне, связывающих каждое из мест измерений. Линии Делоне можно идентифицировать с помощью любой методики триангуляции. Триангуляция Делоне является примером традиционной методики триангуляции, которая при наличии дискретного набора координат поверхности формирует соединительные линии между соседними парами координат поверхности. Набор соединительных линий образует треугольники, имеющие вершины в координатах поверхности. Методика триангуляции Делоне в некоторых случаях максимизирует минимальный угол из всех углов треугольников в триангуляции. Пары точек данных можно идентифицировать путем формирования триангуляции, которая удовлетворяет так называемому "условию Делоне", при котором никакой треугольник не задает описанную окружность, которая окружает другую точку данных в триангуляции. Триангуляция Делоне может формироваться на основе двумерного набора компланарных точек данных. Двумерная триангуляция Делоне может формироваться на основе точек данных на разных высотах путем проецирования точек данных на плоскость (или другую двумерную поверхность), например, на основе координат долготы и широты. В некоторых случаях триангуляция Делоне может формироваться в трех измерениях на основе трехмерного набора некомпланарных точек данных. В некоторых случаях одна или несколько линий Делоне могут выборочно игнорироваться или отбрасываться, например, на основе угловой плотности или близости линий Делоне. Дополнительные и/или другие методики могут использоваться для идентификации пар точек данных.
[0055] Функцию высоты можно назначить каждой паре точек данных. Функция высоты между парой точек данных может представлять временную деформацию поверхности между точками данных в течение периода времени, в котором изменение в высоте и/или изменение в градиенте измерялось в одной или обеих из двух точек данных. Например, функция высоты может быть полиномом h=ax 3 +bx 2 +cx+d третьего порядка, где переменная h представляет временное изменение в высоте в каждой точке на пути между точками данных, переменная x представляет расстояние на пути между точками данных. Коэффициенты a, b, c, и d для функции высоты, назначенной каждой паре точек данных, сначала могут быть неопределенными. Полином третьего порядка описывает сплайн, который может обеспечить непрерывную первую и вторую производные высоты поверхности. Могут использоваться дополнительные и/или другие типы функций высоты.
[0056] На этапе 306 формируются ограничивающие уравнения для кривых высоты поверхности между парами точек данных. Например, ограничивающие уравнения могут быть представлены в матричной форме и/или в виде другого типа объекта данных. Набор ограничивающих уравнений может соотносить неопределенные значения для градиентов поверхности (то есть временные изменения в градиентах поверхности) и/или неопределенные значения для высот поверхности (то есть временные изменения в высотах поверхности) с измерениями перемещения высоты поверхности и/или измерениями перемещения градиента поверхности в принятых геодезических данных. Вышеприведенные Уравнения 8 и 12 предоставляют два примерных набора ограничивающих соотношений для трех примерных местоположений на поверхности. Некоторые или все ограничивающие уравнения могут включать в себя несколько неопределенных значений. Вышеприведенное Уравнение 6 является примером отдельного ограничивающего уравнения с несколькими неопределенными значениями высоты (h1 и h2) и несколькими измеренными значениями (t1 и t2). Ограничивающее уравнение дополнительно или в качестве альтернативы может включать в себя неопределенные значения градиента и/или измеренные значения высоты в любом сочетании. Для ограничивающего уравнения, которое включает в себя несколько неопределенных значений, уравнение ограничивает значения каждой переменной относительно значений других переменных без независимого представления переменных определенными. Другими словами, ограничивающее уравнение может ограничивать без определения неизмеренных значений. Каждое из ограничивающих уравнений обычно формируется на основе пары точек данных. По существу набор ограничивающих уравнений может включать в себя отдельное ограничивающее уравнение для каждой пары точек данных. В некоторых случаях ограничивающие уравнения формируются не для всех пар.
[0057] Ограничивающее уравнение для пары местоположений на поверхности может соотносить неопределенные значения для высот поверхности (то есть неопределенные временные изменения в высотах поверхности) в местоположениях на поверхности с измеренными значениями градиента поверхности (то есть измеренными временными изменениями в градиентах поверхности) в местоположениях на поверхности. В некоторых реализациях для пар точек данных, где градиент поверхности известен в обоих концах, известные значения градиента поверхности могут использоваться для формирования изменения низшего порядка в высоте по линии, соединяющей точки данных. Например, для соседней пары местоположений на поверхности, имеющих координаты поверхности, разделенные расстоянием l, где геодезические данные включают в себя значение t1 градиента поверхности для первой точки в соседней паре и значение t2 градиента поверхности для второй точки в соседней паре, ограничивающее уравнение может ограничивать неопределенное значение h1 высоты поверхности для первой точки и неопределенное значение h2 высоты поверхности для второй точки с помощью уравнения вида 
[0058] Ограничивающее уравнение для пары местоположений на поверхности может соотносить неопределенные значения для градиентов поверхности (то есть неопределенные временные изменения в градиентах поверхности) в местоположениях на поверхности с измеренными значениями высоты поверхности (то есть измеренными временными изменениями в высотах поверхности) в местоположениях на поверхности. В некоторых реализациях для пар точек данных, где высота поверхности известна в обоих концах, известные значения высоты поверхности могут использоваться для формирования локального градиента поверхности, который приводит к поверхности минимальной кривизны. Например, для соседней пары местоположений на поверхности, имеющих координаты поверхности, разделенные расстоянием l, где геодезические данные включают в себя значение h1 высоты поверхности для первой точки в соседней паре и значение h2 высоты поверхности для второй точки в соседней паре, ограничивающее уравнение может ограничивать неопределенное значение t1 градиента поверхности для первой точки и неопределенное значение t2 градиента поверхности для второй точки с помощью уравнения вида 
[0059] Ограничивающее уравнение для пары местоположений на поверхности может соотносить неопределенное значение для градиента поверхности (то есть неопределенные временные изменения в градиенте поверхности) в первом местоположении на поверхности и неопределенное значение для высоты поверхности (то есть неопределенное временное изменение в высоте поверхности) во втором местоположении на поверхности с измеренным значением высоты поверхности (то есть измеренным временным изменением в высоте поверхности) в первом местоположении на поверхности и измеренным значением градиента поверхности (то есть измеренным временным изменением в градиенте поверхности) во втором местоположении на поверхности. В некоторых реализациях для пар точек данных, где высота поверхности известна в одном конце, а градиент поверхности известен в другом конце, известное значение градиента поверхности и известное значение высоты поверхности могут использоваться для формирования ограничивающего уравнения вида 

[0060] В этих и других сценариях могут использоваться дополнительные и/или другие типы ограничивающего уравнения. Значения градиента в ограничивающем уравнении могут разделяться на несколько разных членов, имеющих угловые зависимости, которые представляют направленный характер градиента. Например, значения градиента могут разделяться на несколько компонентов, представляющих градиент поверхности по конкретной соединительной линии, на основе геометрических или тригонометрических соотношений между соединительными линиями. Пример предоставляется в вышеприведенном Уравнении 12. Уравнение для пары точек данных в некоторых случаях может иметь только одно неопределенное значение.
[0061] На этапе 308 ограничивающие уравнения решаются для идентификации значений высоты поверхности (то есть временных изменений в высоте поверхности) и/или значений градиента поверхности (то есть временных изменений в градиенте поверхности) в точках данных, где высота поверхности и/или градиент поверхности были неизвестны. Например, набор ограничивающих уравнений, созданный на этапе 306, можно решить с использованием метода наименьших квадратов, который формирует конкретные значения высоты поверхности для каждого местоположения измерения, где высота поверхности не измерялась, и/или конкретные значения градиента поверхности для каждого местоположения измерения, где градиент поверхности не измерялся. Когда набор ограничивающих уравнений представляется в матричной форме, решение методом наименьших квадратов может формироваться, например, с помощью исключения по Гауссу, с помощью методики Гаусса-Жордана и/или других методик для решения системы линейных уравнений.
[0062] На этапе 310 определяются параметры кривых высоты поверхности между парами точек данных. Например, при конкретных изменениях высоты и конкретных изменениях градиента, сформированных на основе ограничивающих уравнений, коэффициенты (a, b, c, d) полинома третьего порядка можно однозначно определить для соединительных линий между некоторыми или всеми парами точек данных. При конкретных значениях для коэффициентов каждой кривой высоты можно вычислить временное изменение в высоте в любой точке по любой соединительной линии. Результирующие кривые высот могут однозначно определяться значениями высоты и градиента, определенными на этапе 308. Другими словами, значения высоты и градиента, определенные на этапе 308, могут соответствовать одной поверхности минимальной кривизны для линий высоты между соседними парами точек данных. Кривизна поверхности может оцениваться путем суммирования кривизны каждой из линий триангуляции между парами точек данных.
[0063] На этапе 312 интерполируются данные о высоте. Коэффициенты, сформированные на этапе 310, могут использоваться для интерполяции высоты по соединительным линиям, например, до нужной сетки и/или других местоположений. Высоты в местоположениях сетки могут представлять численную модель поверхностной деформации. На этапе 314 формируется график поверхности. Например, модель поверхности, сформированную на этапе 312, можно визуализировать на устройстве отображения, графопостроителе, печатающем устройстве и/или некотором другом носителе. Фиг.4A и 4B - схемы, показывающие примерные модели поверхности, которые указывают деформацию примерной географической поверхности за период времени в один день. Могут использоваться дополнительные и/или другие периоды времени. Фиг.4A показывает примерную модель 400 поверхности, которая представляет географическую поверхность, сформированную в соответствии с описанным выше примерным процессом 300. Фиг.4B показывает другую примерную модель 450 поверхности, которая представляет географическую поверхность. В модели 450 поверхности на Фиг.4B удалены внешние треугольники Делоне, имеющие угол меньше заданного предела. Это делает возможным вогнутые наружные формы в массивах и удаляет области, где интерполяция высоты может быть неверной.
[0064] В некоторых реализациях модели поверхности, сформированные для каждого периода времени, можно анализировать для идентификации перемещения и/или деформации географической поверхности. Перемещение и/или деформация географической поверхности и/или других наблюдаемых событий может быть сопоставленной во времени с полевыми работами. Например, поверхностная деформация может быть сопоставлена с гидроразрывными работами, производственными работами, буровыми работами и/или другими работами в географической области или близи нее. В других примерах поверхностная деформация может использоваться для анализа сейсмических событий и/или перемещения геологических структур в подземной области или возле нее под поверхностью. Процесс 300 может выполняться за относительно короткое количество времени, чтобы модели поверхности можно было представлять и/или анализировать ближе к реальному масштабу времени и с большей временной детализацией. По существу, увеличенная скорость вычисления может позволить более точное сопоставление поверхностной деформации с полевыми работами, более точный анализ подземных событий и/или другие преимущества.
[0065] Фиг.5 - схема, показывающая особенности примерной вычислительной системы 500. Одну или несколько структурных или функциональных особенностей вычислительной подсистемы 103 на Фиг.1A можно реализовать с помощью примерной вычислительной системы 500, которая может работать согласованно с одной или несколькими другими вычислительными системами в дополнительных и/или других местоположениях. В некоторых случаях примерная вычислительная система 500 может выполнять одну или несколько операций примерного процесса 300, показанного на Фиг.3. В некоторых случаях вычислительная подсистема 500 может формировать одну или несколько графических моделей, показанных на Фиг.4A и 4B. Вычислительная подсистема 500 может включать в себя дополнительные и/или другие компоненты и может конфигурироваться для работы иным образом.
[0066] Примерная вычислительная система 500 включает в себя процессор 512, запоминающее устройство 510 и контроллеры 514 ввода/вывода, совместимо соединенные с помощью шины 511. Запоминающее устройство 510 может включать в себя, например, оперативное запоминающее устройство (RAM), запоминающее устройство (например, записываемое постоянное запоминающее устройство (ROM) и/или другие), жесткий диск и/или другой тип носителя информации. Вычислительная система 500 может предварительно программироваться и/или может программироваться (и перепрограммироваться) путем загрузки программы из другого источника (например, с CD-ROM, с другого вычислительного устройства по сети передачи данных и/или другим способом). Контроллер 514 ввода/вывода соединяется с устройствами ввода/вывода (например, монитором 518, мышью, клавиатурой и/или другими устройствами ввода/вывода) и с сетью 516. Устройства ввода/вывода принимают и передают данные в аналоговом или цифровом виде по линиям связи, например последовательной линии связи, беспроводной линии связи (например, инфракрасной, радиочастотной и/или другим), параллельной линии связи и/или другому типу линии связи.
[0067] Сеть 516 может включать в себя любой тип сети передачи данных. Например, сеть 516 может включать в себя беспроводную и/или проводную сеть, локальную сеть (LAN), глобальную сеть (WAN), частную сеть, сеть общего пользования (например Интернет), сеть WiFi, сеть, которая включает в себя спутниковую линию связи, и/или другой тип сети передачи данных.
[0068] Запоминающее устройство 510 может хранить команды (например, машинный код), ассоциированные с операционной системой, компьютерными приложениями и/или другими ресурсами. Запоминающее устройство 510 также может хранить данные приложения и объекты данных, которые могут интерпретироваться одним или несколькими приложениями и/или виртуальными машинами, работающими на вычислительной системе 500. Как показано на Фиг.5, примерное запоминающее устройство 510 включает в себя данные 530 и программы 540. В некоторых реализациях запоминающее устройство в вычислительном устройстве может включать в себя часть или всю информацию, показанную в примерном запоминающем устройстве 510. Запоминающее устройство 510 может хранить дополнительную информацию, например файлы и команды, ассоциированные с операционной системой, драйверами устройств, архивными данными, и/или другие типы информации.
[0069] Файлы и данные в запоминающем устройстве 510 включают в себя информацию, относящуюся к оценке поверхности, например геодезические данные, которые включают в себя информацию о высоте поверхности и/или информацию о градиенте поверхности для нескольких местоположений на поверхности в географической области. Информация, сохраненная в запоминающем устройстве 510, может включать в себя и/или может выводиться из данных, собранных системой дистанционных измерений, например, массивом уклономеров, приемниками GPS, системой InSAR и/или другими. В показанном примере запоминающее устройство 510 хранит данные 532 уклономера, данные 534 GPS, данные 536 InSAR и данные 538 о кривизне. Запоминающее устройство 510 может хранить дополнительные и/или другие типы информации, относящейся к высоте поверхности.
[0070] Данные 532 уклономера, данные 534 GPS и данные 536 InSAR могут включать в себя геодезические данные, принятые от измерительной подсистемы 101 на Фиг.1 и/или сформированные на основе выполненных ей измерений. Например, данные 532 уклономера могут включать в себя информацию о градиенте поверхности, сформированную одной или несколькими станциями-уклономерами 112; данные 534 GPS могут включать в себя данные о высоте поверхности, сформированные одним или несколькими приемниками 114 GPS; и данные 536 InSAR могут включать в себя информацию о высоте поверхности, сформированную спутниками 120 InSAR. Геодезические данные могут включать в себя геодезические данные для нескольких разных географических областей, а также геодезические данные для нескольких разных периодов времени и/или нескольких разных местоположений на поверхности в данной географической области. Например, данные 532 уклономера могут включать в себя двумерные координаты поверхности (например, координаты долготы и широты), указывающие местоположения на поверхности уклономеров, которые получали точки данных, включенные в данные 532 уклономера, и/или данные 532 уклономера могут включать в себя временные данные (например, относительные или абсолютные временные координаты) для каждой точки данных, указывающие моменты, когда были получены данные, и/или указывающие периоды времени, за которые наблюдалось временное изменение. Аналогичным образом данные 534 GPS, данные 536 InSAR и/или другие типы геодезических данных могут включать в себя данные о координатах поверхности и/или временные данные для каждой точки данных. Геодезические данные могут включать в себя дополнительную и/или другую информацию. В некоторых случаях геодезические данные включают в себя информацию о неопределенности измерения или величинах ошибки для каждого измерения. В некоторых случаях геодезические данные включают в себя порядковый номер, идентификатор и/или другую информацию об измерительном устройстве, которое получало данные. Например, геодезические данные могут включать в себя информацию, которая идентифицирует конкретную станцию-уклономер или приемник GPS, которые формировали данные.
[0071] Данные 538 о кривизне могут включать в себя информацию о поверхности, сформированную программой 542 анализа поверхности на основе геодезических измерений. Например, данные 538 о кривизне могут включать в себя соединительные линии для соседних местоположений на поверхности, значения высоты поверхности и/или значения градиента поверхности, сформированные программой 542 анализа поверхности на основе данных 532 уклономера, данных 534 GPS, данных 536 InSAR и/или других данных. Данные 538 о кривизне могут включать в себя параметры кривых поверхности, например, по соединительным линиям между соседними местоположениями на поверхности. В некоторых случаях данные 538 о кривизне могут включать в себя параметры полиномиальной кривой (например, второго порядка, третьего порядка и т. п.) между соседними парами точек данных. Данные 538 о кривизне могут включать в себя модели, схемы, карты, графики и/или другие типы данных, которые можно визуализировать для формирования визуального представления географической поверхности. Например, данные 538 о кривизне могут включать в себя одну или несколько моделей 400, 450 поверхности, показанных на Фиг.4A и 4B соответственно. Данные 538 о кривизне могут включать в себя информацию о нескольких разных географических областях, информацию о нескольких разных площадях в заданной географической области, информацию о нескольких разных моментах времени и/или другие типы информации.
[0072] Программы 540 могут включать в себя программные приложения, сценарии, программы, функции, исполняемые файлы и/или другие модули, которые интерпретируются и/или исполняются процессором 512. В показанном примере программы 540 включают в себя программу 542 анализа поверхности, которая может включать в себя программные приложения, сценарии, программы, функции, исполняемые файлы и/или другие модули, которые работают самостоятельно или в сочетании в виде инструмента оценки поверхности. Программа 542 анализа поверхности может включать в себя машиночитаемые команды для выполнения одной или нескольких операций, показанных на Фиг.3. Программы 540, включающие в себя программу 542 анализа поверхности, могут получать входные данные, например информацию о высоте поверхности, информацию о градиенте поверхности, информацию о координатах поверхности и/или другие типы входных данных, из запоминающего устройства 510, из другого локального источника и/или из одного или нескольких удаленных источников (например, по сети 516). Программы 540, включающие в себя программу 542 анализа поверхности, могут формировать выходные данные, например данные 538 о кривизне и/или другие типы выходных данных, и сохранять выходные данные в запоминающем устройстве 510, на другом локальном носителе и/или в одном или нескольких удаленных устройствах (например, путем отправки выходных данных по сети 516).
[0073] Процессор 512 может исполнять команды, например, для формирования выходных данных на основе входных данных. Например, процессор 512 может выполнять программы 540 путем исполнения и/или интерпретации программного обеспечения, сценариев, функций, исполняемых файлов и/или других модулей, содержащихся в программах 540. Процессор 512 может выполнять одну или несколько операций, показанных на Фиг.3. Входные данные, принятые процессором 512, и/или выходные данные, сформированные процессором 512, могут включать в себя любые из данных 532 уклономера, данных 534 GPS, данных 536 InSAR, данных 538 о кривизне и/или других типов данных.
[0074] Как правило, программа 542 анализа поверхности может включать в себя высокоуровневый код, низкоуровневый код, исходный код, объектный код, машинный код или сочетание этих и/или других типов кода. Программа 542 анализа поверхности может быть написана на C, C++, Perl и/или других типах транслируемых, интерпретируемых или исполняемых языков программирования. В некоторых примерных реализациях программа 542 анализа поверхности может включать в себя одну или несколько функций или файлов (например, файл ".m"), которые могут интерпретироваться и/или исполняться вычислительным программным обеспечением MATLAB®, доступным от компании MATHWORKS®. Ниже приведены некоторые примерные функции MATLAB®, которые могут включаться в файл ".m" и/или в несколько связанных файлов ".m". Примерные функции MATLAB® могут исполняться с использованием MATLAB® версии 7.7. Одна или несколько команд могут вызывать или иным образом использовать заданную в MATLAB® функцию и/или другие традиционные функции. В некоторых реализациях одно или несколько из команд, функций и/или алгоритмов могут изменяться, и в некоторых случаях могут подставляться дополнительные и/или другие команды, функции или алгоритмы. По существу, нижеследующие функции MATLAB® предоставляют пример кода компьютерной программы, который может использоваться для реализации особенностей одной или нескольких методик, раскрытых в этом документе. Например, одна или несколько из следующих функций MATLAB® могут использоваться для выполнения одной или нескольких операций процесса 300, показанного на Фиг.3. Эти и другие особенности методик, раскрытых в этом документе, можно дополнительно или в качестве альтернативы реализовать с использованием разных типов команд, разных типов кодов, разных типов формул, разных типов алгоритмов и/или разных типов объектов данных. Примерные функции MATLAB® ниже могут использоваться вместе. Другими словами, некоторые команды в примерных функциях MATLAB® ниже вызывают одну из других примерных функций MATLAB®, предоставленных ниже. По существу, входы и выходы для каждой функции станут очевидны из контекста и сопровождающего описания ниже.
[0075] Следующая примерная функция MATLAB® может использоваться для формирования модели поверхностной деформации на основе геодезических данных. Эта примерная функция идентифицирует параметры подобранных кривых поверхности на основе измерений изменения в градиенте и/или измерений изменения в высоте для нескольких измеренных местоположений на поверхности за данный период времени, и примерная функция формирует результирующую матрицу ("elev"), которая включает в себя координаты поверхности и значения временного изменения в высоте для нескольких точек на поверхности. Выходные значения высоты соответствуют поверхности минимальной кривизны. Могут использоваться дополнительные и/или другие методики. Примерная функция может принимать следующие входные объекты данных: "tiltvalues" является матрицей, имеющей n строк и четыре столбца, где каждая строка включает в себя координаты восточной и северной поверхности от уклономера, значение градиента в восточном направлении и значение градиента в северном направлении; "elevvalues" является матрицей, имеющей m строк и три столбца, где каждая строка включает в себя координаты восточной и северной поверхности и значение изменения высоты; "zeropt" является необязательным индексом для строки матрицы "tiltvalues", который нужно использовать в качестве нулевой отсчетной высоты; "small_angle_lim" является значением, которое выбирает линии Делоне для удаления из анализа, где у треугольников Делоне с углом меньше small_angle_lim будет удалена наибольшая сторона. Входные данные "tiltvalues" и "elevvalues" могут включать в себя данные измерений из одной или нескольких геодезических измерительных систем.
function elev = splinefit(tiltvalues,elevvalues,zsite,small_angle_lim)
if nargin == 0
test_spline2;
return;
end
pointsperline = 10;
diagnostics = false;
points = organize_inputs(tiltvalues,elevvalues,zsite);
triangles = delaunay(points.x,points.y);
if diagnostics
openfigure('Delaunay');
triplot(triangles,points.x,points.y);
hold on;
plot(points.x,points.y,'or')
end
line.ind = [triangles(:,1:2);triangles(:,2:3);[triangles(:,1) triangles(:,3)]];
line.ind = unique(sort(line.ind,2),'rows');
removeline = findsmallangles(triangles,points,small_angle_lim);
line.ind = setdiff(line.ind,removeline,'rows');
if diagnostics
for k = 1:size(removeline,1)
x = points.x(removeline(k,:));
y = points.y(removeline(k,:));
plot(x,y,'r-')
end
end
line = get_line_param(points,line);
xypts = getxypts(line,points,pointsperline);
ideal_delta_h = low_order_spline(line);
[A,x] = elev_matrix(points,line);
i = ~all(A == 0,2);
A = A(i,:);
ideal_delta_h = ideal_delta_h(i);
[A,x,points,ideal_delta_h] = check_rank(A,x,points,ideal_delta_h,line);
solution = A\ideal_delta_h;
i = strcmp(x.source,'elev');
points.elev(x.ind(i)) = solution(i);
i = strcmp(x.source,'etilt');
points.etilt(x.ind(i)) = solution(i);
i = strcmp(x.source,'ntilt');
points.ntilt(x.ind(i)) = solution(i);
line.tilt = resolve_tilt(points,line);
xypts.elev = fit_curve(points,line,pointsperline);
elev = [xypts.x(:) xypts.y(:) xypts.elev(:)];
[temp,nonrepeat] = unique(elev(:,1:2),'rows');
elev = elev(nonrepeat,:);
[0076] Следующая примерная функция MATLAB® может использоваться для организации входных геодезических данных для дополнительной обработки. Могут использоваться дополнительные и/или другие методики.
function points = organize_inputs(tiltvalues,elevvalues,zsite)
dist_lim = .1;
tiltvalues = tiltvalues(~any(isnan(tiltvalues),2),:);
elevvalues = elevvalues(~any(isnan(elevvalues),2),:);
points.x = tiltvalues(:,1);
points.y = tiltvalues(:,2);
points.elev = NaN*zeros(size(points.x));
points.etilt = tiltvalues(:,3)/1e6;
points.ntilt = tiltvalues(:,4)/1e6;
points.elev(zsite) = 0;
if size(elevvalues,1) < 1
return
end
for k = 1:numel(points.x)
dist = trilength(tiltvalues(k,1:2),elevvalues(:,1:2));
i = find(dist <= dist_lim);
if numel(i) > 1
showwarn('Multiple elevation points found close to a tilt point');
[temp,i] = min(dist);
end
if numel(i) == 1
points.elev(k) = elevvalues(i,3);
elevvalues(i,:) = [];
end
end
if size(elevvalues,1) < 1
return
end
points.x = [points.x;elevvalues(:,1)];
points.y = [points.y;elevvalues(:,2)];
points.elev = [points.elev;elevvalues(:,3)];
points.etilt = [points.etilt;NaN*zeros(size(elevvalues,1),1)];
points.ntilt = [points.ntilt;NaN*zeros(size(elevvalues,1),1)];
[0077] Следующая примерная функция MATLAB® может использоваться для удаления одной или нескольких соединительных линий на основе углов между соединительными линиями. Могут использоваться дополнительные и/или другие методики.
function removeline = findsmallangles(triangles,points,anglelimit)
xy = [points.x points.y];
a = trilength(xy(triangles(:,1),:),xy(triangles(:,2),:));
b = trilength(xy(triangles(:,2),:),xy(triangles(:,3),:));
c = trilength(xy(triangles(:,3),:),xy(triangles(:,1),:));
anglea = 180/pi * findangle(a,b,c);
angleb = 180/pi * findangle(b,a,c);
anglec = 180 - (anglea + angleb);
smalltri = find(any([anglea angleb anglec] <= anglelimit,2));
[temp,longside] = max([a(smalltri) b(smalltri) c(smalltri)],[],2);
removeline = zeros(numel(longside),2);
for k = 1:numel(longside)
if longside(k) == 1,
removeline(k,:) = triangles(smalltri(k),[1 2]);
elseif longside(k) == 2,
removeline(k,:) = triangles(smalltri(k),[2 3]);
elseif longside(k) == 3,
removeline(k,:) = triangles(smalltri(k),[1 3]);
end
end
removeline = unique(sort(removeline,2),'rows');
[0078] Следующая примерная функция MATLAB® может использоваться для нахождения угла на основе теоремы косинусов. Могут использоваться дополнительные и/или другие методики.
function angle = findangle(a,b,c)
angle = acos((c.^2 + b.^2 - a.^2)./(2*b.*c));
[0079] Следующая примерная функция MATLAB® может использоваться для вычисления длины соединительной линии между двумя местоположениями на поверхности. Могут использоваться дополнительные и/или другие методики.
function lng = trilength(p1,p2)
p1 = p1';
p2 = p2';
lng = sqrt((p1(1,:)- p2(1,:)).^2 + (p1(2,:) - p2(2,:)).^2)';
[0080] Следующая примерная функция MATLAB® может использоваться для идентификации градиента, высоты, длины и/или ориентации для одной или нескольких точек на соединительной линии между двумя местоположениями на поверхности. Могут использоваться дополнительные и/или другие методики.
function line = get_line_param(points,line)
dx = diff(points.x(line.ind),1,2);
dy = diff(points.y(line.ind),1,2);
line.theta = pi/2 - atan2(dy,dx);
line.tilt = resolve_tilt(points,line);
line.elev = points.elev(line.ind);
p1 = [points.x(line.ind(:,1)) points.y(line.ind(:,1))];
p2 = [points.x(line.ind(:,2)) points.y(line.ind(:,2))];
line.lng = trilength(p1,p2);
[0081] Следующая примерная функция MATLAB® может использоваться для идентификации градиента по соединительной линии между двумя местоположениями на поверхности. Могут использоваться дополнительные и/или другие методики.
function tilt = resolve_tilt(points,line)
p1 = line.ind(:,1);
p2 = line.ind(:,2);
tilt_1 = …
points.etilt(p1).*sin(line.theta)+points.ntilt(p1).*cos(line.theta);
tilt_2 = …
points.etilt(p2).*sin(line.theta)+points.ntilt(p2).*cos(line.theta);
tilt = [tilt_1 tilt_2];
[0082] Следующая примерная функция MATLAB® может использоваться для формирования ограничивающего соотношения для пары соседних местоположений на поверхности. Могут использоваться дополнительные и/или другие методики.
function delta_h = low_order_spline(line)
delta_h = NaN*ones(size(line.lng));
i = all(isnan(line.elev),2);
delta_h(i) = -mean(line.tilt(i,:),2).*line.lng(i);
i = ~any(isnan(line.elev),2);
delta_h(i) = -diff(line.elev(i,:),1,2);
i = isnan(line.elev(:,1)) & …
~isnan(line.elev(:,2)) & isnan(line.tilt(:,2));
delta_h(i) = -line.tilt(i,1).*line.lng(i)/2 - line.elev(i,2);
i = isnan(line.elev(:,1)) & …
~isnan(line.elev(:,2)) & ~isnan(line.tilt(:,2));
delta_h(i) = -mean(line.tilt(i,:),2).*line.lng(i) - line.elev(i,2);
i = ~isnan(line.elev(:,1)) & …
isnan(line.tilt(:,1)) & isnan(line.elev(:,2));
delta_h(i) = -line.tilt(i,2).*line.lng(i)/2 + line.elev(i,1);
i = ~isnan(line.elev(:,1)) & …
~isnan(line.tilt(:,1)) & isnan(line.elev(:,2));
delta_h(i) = -mean(line.tilt(i,:),2).*line.lng(i);
[0083] Следующая примерная функция MATLAB® может использоваться для формирования набора ограничивающих соотношений на основе геодезических данных. Могут использоваться дополнительные и/или другие методики.
function [A,x] = elev_matrix(points,line)
A = zeros(size(line.ind,1),numel(points.x));
x.source(1:size(A,2)) = {'elev'};
x.ind(1:size(A,2)) = 1:numel(points.elev);
for k = 1:numel(line.lng)
A(k,line.ind(k,1)) = -1;
A(k,line.ind(k,2)) = 1;
end
i = isnan(points.elev);
A = A(:,i);
x.source = x.source(i);
x.ind = x.ind(i);
i = find(~isnan(points.elev) & isnan(points.etilt));
orig_col = size(A,2); % Active column of A;
A = [A zeros(size(A,1),2*numel(i))];
x.source = [x.source cell(1,2*numel(i))];
x.ind = [x.ind zeros(1,2*numel(i))];
for k = 1:numel(i)
rows = any(line.ind == i(k),2);
col = orig_col + 1 + 2*(k-1);
x.source(col:col+1) = {'etilt' 'ntilt'};
x.ind(col:col+1) = i(k);
A(rows,col) = line.lng(rows).*sin(line.theta(rows))/2;
A(rows,col+1) = line.lng(rows).*cos(line.theta(rows))/2;
end
i = ~all(A == 0,1);
A = A(:,i);
x.source = x.source(i);
x.ind = x.ind(i);
[0084] Следующая примерная функция MATLAB® может использоваться для определения, можно ли обратить матрицу, и/или интерполирования неопределенного градиента поверхности в одном или нескольких местоположениях на поверхности, например, для увеличения ранга матрицы. Могут использоваться дополнительные и/или другие методики.
function [A,x,points,ideal_delta_h] = …
check_rank(A,x,points,ideal_delta_h,line)
if rank(A) >= size(A,2)
return
end
reduce_count = 0;
while rank(A) < size(A,2)
reduce_count = reduce_count + 1;
col = find(strcmp(x.source,'etilt'),1);
i = x.ind(col);
conn_lines = any(line.ind == i,2);
conn_pts = line.ind(conn_lines,:);
conn_pts = conn_pts(conn_pts ~= i);
theta = line.theta(conn_lines);
Ap = [sin(theta) cos(theta)];
line_tilt = line.tilt(conn_lines,:);
line_lng = line.lng(conn_lines);
Bp = NaN*zeros(sum(conn_lines),1);
for k = 1:numel(Bp)
if any(~isnan(line_tilt(k,:)))
Bp(k) = line_tilt(k,~isnan(line_tilt(k,:)));
elseif ~isnan(points.elev(conn_pts(k)))
Bp(k) = (points.elev(i) - points.elev(conn_pts(k)))/line_lng(k);
end
end
Ap = Ap(~isnan(Bp),:);
Bp = Bp(~isnan(Bp));
if rank(Ap) == size(Ap,2)
tilt = Ap\Bp;
else
showwarn('Could not resolve tilt')
end
points.etilt(i) = tilt(1);
points.ntilt(i) = tilt(2);
ideal_delta_h = ideal_delta_h - A(:,col+[0 1])*tilt(:);
keepindex = setdiff(1:size(A,2),col+[0 1]);
A = A(:,keepindex);
x.source = x.source(keepindex);
x.ind = x.ind(keepindex);
line.tilt = resolve_tilt(points,line);
end
if reduce_count == 1
str = ['Interpolated tilt at ' num2str(reduce_count) ' location.'];
else
str = ['Interpolated tilt at ' num2str(reduce_count) ' locations.'];
end
disp(['Inversion matrix was rank deficient.' str])
[0085] Следующая примерная функция MATLAB® может использоваться для вычисления точек на кривой высоты между двумя местоположениями на поверхности. Могут использоваться дополнительные и/или другие методики.
function point_elev = fit_curve(points,line,pointsperline)
n = numel(line.lng);
end_elev = points.elev(line.ind);
alpha = zeros(n,4);
tilt = -line.tilt;
alpha(:,1) = (tilt(:,1) + tilt(:,2))./line.lng.^2 - …
2*diff(end_elev,1,2)./line.lng.^3;
alpha(:,2) = 3*diff(end_elev,1,2)./line.lng.^2 - …
(2*tilt(:,1) + tilt(:,2))./line.lng;
alpha(:,3) = tilt(:,1);
alpha(:,4) = end_elev(:,1);
point_elev = zeros(n,pointsperline);
for k = 1:n
xval = linspace(0,line.lng(k),pointsperline);
point_elev(k,:) = polyval3(alpha(k,:),xval);
end
[0086] Следующая примерная функция MATLAB® может использоваться для вычисления точек на полиномиальной кривой высоты третьего порядка между двумя местоположениями на поверхности. Могут использоваться дополнительные и/или другие методики.
function out = polyval3(coeff,value)
out = coeff(1).*(value.^3) + coeff(2).*(value.^2) + …
coeff(3).*value + coeff(4);
[0087] Следующая примерная функция MATLAB® может использоваться для вычисления координат поверхности по соединительной линии между двумя местоположениями на поверхности. Могут использоваться дополнительные и/или другие методики.
function xypts = getxypts(line,points,pointsperline)
numlines = size(line.ind,1);
xypts.x = zeros(numlines,pointsperline);
xypts.y = zeros(numlines,pointsperline);
xypts.elev = zeros(numlines,pointsperline);
for k = 1:numlines
xypts.x(k,:) = linspace(points.x(line.ind(k,1)), …
points.x(line.ind(k,2)),pointsperline);
xypts.y(k,:) = linspace(points.y(line.ind(k,1)), …
points.y(line.ind(k,2)),pointsperline);
end
[0088] Некоторые особенности предмета изобретения и операций, описанные в данном описании изобретения, могут быть реализованы в цифровых электронных схемах либо в компьютерном программном обеспечении, микропрограммном обеспечении или аппаратных средствах, включая структуры, раскрытые в данном описании изобретения и их структурные эквиваленты, либо в сочетаниях одного или нескольких из них. Некоторые особенности предмета изобретения, описанные в данном описании изобретения, могут быть реализованы в виде одной или нескольких компьютерных программ, то есть одного или нескольких модулей из команд компьютерной программы, кодированных на компьютерном носителе информации для исполнения устройством обработки данных или для управления его работой. В качестве альтернативы или дополнительно команды программы могут кодироваться в искусственно сформированном распространяемом сигнале, например, сформированном машиной электрическом, оптическом или электромагнитном сигнале, который формируется для кодирования информации для передачи подходящему приемному устройству для исполнения устройством обработки данных. Компьютерный носитель информации может быть или включаться в машиночитаемое запоминающее устройство, машиночитаемую подложку хранения, матрицу или устройство памяти с произвольным или последовательным доступом либо сочетание одного или нескольких из них. Кроме того, хотя компьютерный носитель информации не является распространяемым сигналом, компьютерный носитель информации может быть источником или назначением команд компьютерной программы, кодированных в искусственно сформированном распространяемом сигнале. Компьютерный носитель информации также может быть или включаться в один или несколько отдельных физических компонентов или носителей (например, несколько CD, дисков или других запоминающих устройств).
[0089] Операции, описанные в данном описании изобретения, могут быть реализованы как операции, выполняемые устройством обработки данных над данными, сохраненными в одном или нескольких машиночитаемых запоминающих устройствах или принятыми из других источников.
[0090] Термин "устройство обработки данных" включает в себя все виды устройств и машин для обработки данных, включая в качестве примера программируемый процессор, компьютер, систему на кристалле или несколько либо сочетания вышеупомянутого. Устройство может включать в себя специализированные логические схемы, например FPGA (программируемая пользователем вентильная матрица) или ASIC (специализированная интегральная схема). Устройство в дополнение к аппаратным средствам также может включать в себя код, который создает среду выполнения для компьютерной программы, о которой идет речь, например код, который составляет микропрограммное обеспечение процессора, стек протоколов, систему управления базами данных, операционную систему, межплатформенную среду исполнения, виртуальную машину или сочетание одного или нескольких из них. Устройство и среда выполнения могут реализовать различные инфраструктуры моделей вычислений, например инфраструктуры веб-служб, распределенных вычислений и коллективных вычислений.
[0091] Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, сценарий или код) может быть написана на любом виде языка программирования, включая транслируемые или интерпретируемые языки, декларативные или процедурные языки, и она может быть развернута в любом виде, включая автономную программу или модуль, компонент, подпрограмму, объект или другую единицу, подходящую для использования в вычислительной среде. Компьютерная программа может, но не должна, соответствовать файлу в файловой системе. Программа может храниться в части файла, который хранит другие программы или данные (например, один или несколько сценариев, сохраненных в документе на языке разметки), в одном файле, выделенном для программы, о которой идет речь, или в нескольких согласованных файлах (например, файлах, которые хранят один или несколько модулей, подпрограмм или частей кода). Компьютерная программа может быть развернута для выполнения на одном компьютере или на нескольких компьютерах, которые располагаются на одной площадке или распределены по нескольким площадкам и взаимосвязаны с помощью сети связи.
[0092] Особенности процессов и логических потоков, описанные в данном описании изобретения, могут выполняться одним или несколькими программируемыми процессорами, исполняющими одну или несколько компьютерных программ для выполнения действий путем воздействия на входные данные и формирования вывода. Процессы и логические потоки также могут выполняться специализированными логическими схемами, например FPGA (программируемая пользователем вентильная матрица) или ASIC (специализированная интегральная схема), и устройство также может быть реализовано в виде специализированных логических схем.
[0093] Процессоры, подходящие для исполнения компьютерной программы, в качестве примера включают в себя как универсальные, так и специализированные микропроцессоры и любой один или несколько процессоров в любом виде цифрового компьютера. Как правило, процессор будет принимать команды и данные из постоянного запоминающего устройства или оперативного запоминающего устройства, либо из обоих. Неотъемлемыми элементами компьютера являются процессор для выполнения действий в соответствии с командами и одно или несколько запоминающих устройств для хранения команд и данных. Как правило, компьютер также будет включать в себя или функционально соединяться для приема данных или передачи данных, либо того и другого, одно или несколько запоминающих устройств большой емкости для хранения данных, например, магнитные, магнитооптические диски или оптические диски. Однако компьютеру не нужно содержать такие устройства. Кроме того, компьютер может встраиваться в другое устройство, например приемник Системы глобального позиционирования (GPS) или портативное запоминающее устройство (например, флеш-накопитель к универсальной последовательной шине (USB)), и другие типы устройств. Устройства, подходящие для хранения команд компьютерной программы и данных, включают в себя все виды энергонезависимого запоминающего устройства, носителей и запоминающих устройств, в качестве примера включающих в себя полупроводниковые запоминающие устройства, например EPROM, EEPROM, и устройства на флэш-памяти; магнитные диски, например внутренние жесткие диски или съемные диски; магнитооптические диски; и диски CD-ROM и DVD-ROM. Процессор и запоминающее устройство могут дополняться специализированными логическими схемами или включаться в них.
[0094] Чтобы предусмотреть взаимодействие с пользователем, особенности предмета изобретения, описанные в данном описании изобретения, могут быть реализованы на компьютере, имеющем устройство отображения, например монитор CRT (электронно-лучевая трубка) или LCD (жидкокристаллический дисплей), для отображения информации пользователю и клавиатуру и указательное устройство, например мышь или шаровой манипулятор, с помощью которого пользователь может предоставить компьютеру входные данные. Другие виды устройств с тем же успехом могут использоваться для обеспечения взаимодействия с пользователем; например, обратная связь, предоставленная пользователю, может быть любым видом сенсорной обратной связи, например, визуальной обратной связью, слуховой обратной связью или тактильной обратной связью; и входные данные от пользователя могут приниматься в любом виде, включая звуковой, речевой или тактильный ввод. К тому же компьютер может взаимодействовать с пользователем путем отправки документов и приема документов от устройства, которое используется пользователем; например, путем отправки веб-страниц в веб-обозреватель на клиентском устройстве пользователя в ответ на запросы, принятые от веб-обозревателя.
[0095] Некоторые особенности предмета изобретения, описанные в данном описании изобретения, могут быть реализованы в вычислительной системе, которая включает в себя внутренний компонент, например, в виде сервера данных, либо которая включает в себя промежуточный компонент, например, сервер приложений, либо которая включает в себя внешний компонент, например, клиентский компьютер, имеющий графический интерфейс пользователя или веб-обозреватель, посредством которых пользователь может взаимодействовать с реализацией предмета изобретения, описанной в данном описании изобретения, либо любое сочетание одного или нескольких таких внутренних, промежуточных или внешних компонентов. Компоненты системы могут быть взаимосвязаны с помощью любой формы или носителя цифровой передачи данных, например, с помощью сети связи. Примеры сетей связи включают в себя локальную сеть ("LAN") и глобальную сеть ("WAN"), сетевой комплекс (например, Интернет) и одноранговые сети (например, произвольные одноранговые сети).
[0096] Вычислительная система может включать в себя клиенты и серверы. Клиент и сервер обычно удалены друг от друга и обычно взаимодействуют по сети связи. Отношение клиента и сервера возникает посредством компьютерных программ, работающих на соответствующих компьютерах и имеющих клиент-серверную связь друг с другом. В некоторых вариантах осуществления сервер передает данные (например, HTML-страницу) клиентскому устройству (например, с целью отображения данных и приема пользовательского ввода от пользователя, взаимодействующего с клиентским устройством). Данные, сформированные на клиентском устройстве (например, результат взаимодействия с пользователем), могут приниматься на сервере от клиентского устройства.
[0097] Хотя данное описание изобретения содержит многие специфические подробности реализации, эти подробности не следует толковать как ограничения объема любого, что может быть заявлено, а скорее как описания признаков, характерных для конкретных реализаций. Некоторые признаки, которые описываются в данном описании изобретения применительно к отдельным реализациям, также можно реализовать в сочетании в одной реализации. Наоборот, различные признаки, которые описываются применительно к одной реализации, также можно реализовать в нескольких реализациях, отдельно или в любой подходящей субкомбинации. Кроме того, хотя признаки могут описываться выше как действующие в некоторых сочетаниях и даже сначала заявляться как таковые, один или несколько признаков из заявленного сочетания в некоторых случаях могут исключаться из сочетания и заявленное сочетание может относиться к субкомбинации или разновидности субкомбинации.
[0098] Аналогичным образом, хотя операции изображаются на чертежах в конкретном порядке, это не следует понимать как требование того, что для достижения желаемых результатов такие операции должны выполняться в конкретном показанном порядке или в последовательном порядке, или что должны выполняться все проиллюстрированные операции. В некоторых обстоятельствах могут быть полезны многозадачность и параллельная обработка. Кроме того, разделение различных компонентов системы в описанных выше реализациях не следует понимать как требование такого разделения во всех реализациях, и следует понимать, что описанные компоненты и системы обычно можно объединять в единое изделие или упаковывать в несколько изделий.
[0099] В настоящем раскрытии изобретения "каждый" относится к каждому из нескольких элементов или операций в группе и может включать в себя подмножество элементов или операций в группе и/или все элементы или операции в группе. В настоящем раскрытии изобретения термин "на основе" указывает, что элемент или операция по меньшей мере частично основывается на одном или нескольких других элементах или операциях - и может основываться исключительно, частично, главным образом, второстепенно, непосредственно или косвенно на одном или нескольких других элементах или операциях.
[0100] Описано некоторое количество вариантов осуществления изобретения. Тем не менее, станет понятно, что могут быть сделаны различные модификации без отклонения от сущности и объема изобретения. Соответственно, другие варианты осуществления входят в объем нижеследующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| ОПРЕДЕЛЕНИЕ ДОВЕРИТЕЛЬНОГО ЗНАЧЕНИЯ ДЛЯ ПЛОСКОСТИ РАЗВИТИЯ ТРЕЩИНЫ | 2013 |
|
RU2602760C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ПЛОСКОСТЕЙ РАЗВИТИЯ ТРЕЩИН | 2013 |
|
RU2592751C1 |
| ИДЕНТИФИКАЦИЯ КЛАСТЕРОВ ОРИЕНТАЦИИ ПО МИКРОСЕЙСМИЧЕСКИМ ДАННЫМ | 2013 |
|
RU2601535C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ С ПОМОЩЬЮ ИЗМЕРЕНИЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОТЕХНИЧЕСКИМ СПОСОБОМ | 2003 |
|
RU2381520C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ С ПОМОЩЬЮ ИЗМЕРЕНИЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОТЕХНИЧЕСКИМ МЕТОДОМ | 2009 |
|
RU2494411C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| ПОДВИЖНЫЙ ОПОРНЫЙ ПРИЕМНИК ДЛЯ КИНЕМАТИЧЕСКОЙ НАВИГАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ (RTK), ОСНОВАННОЙ НА ПОПРАВКАХ, ВЫЧИСЛЕННЫХ В ОПОРНОМ ПРИЕМНИКЕ | 2005 |
|
RU2386980C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ СМЕЩЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2001 |
|
RU2206871C2 |
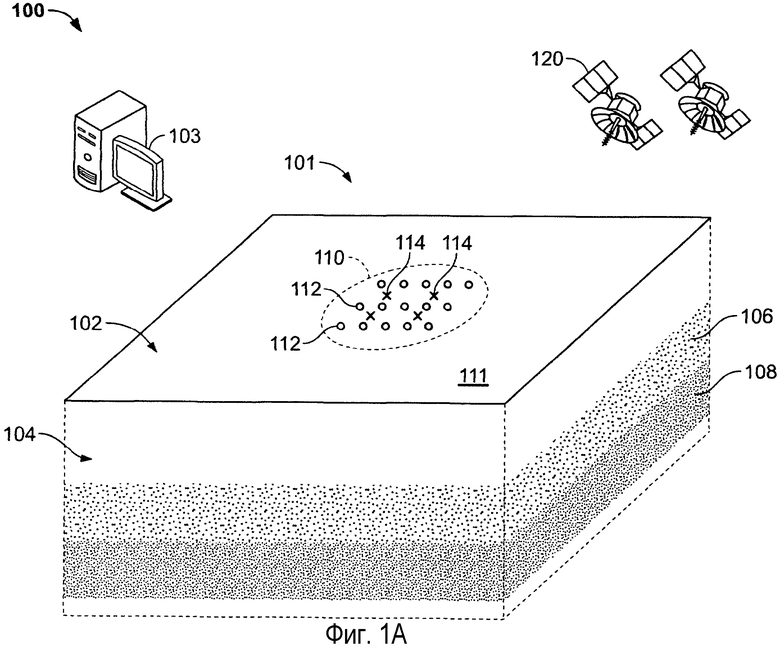
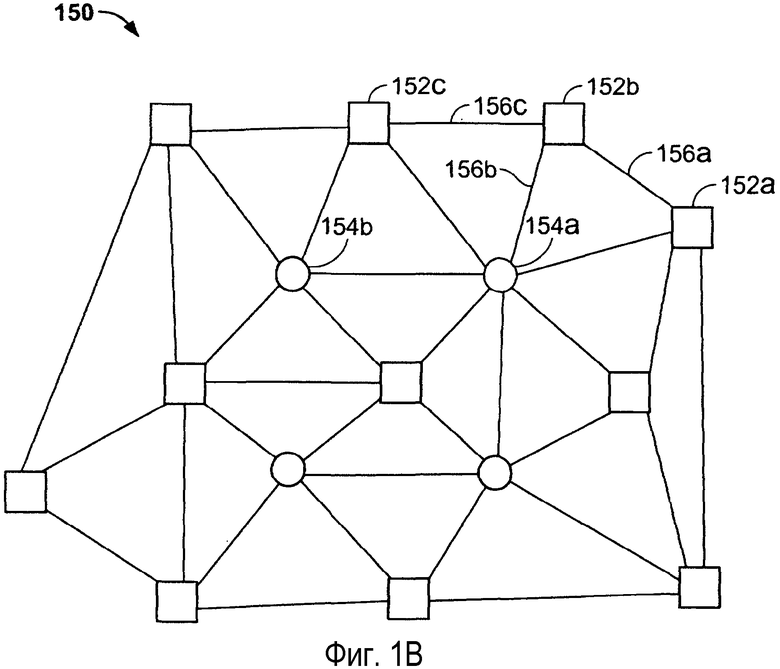
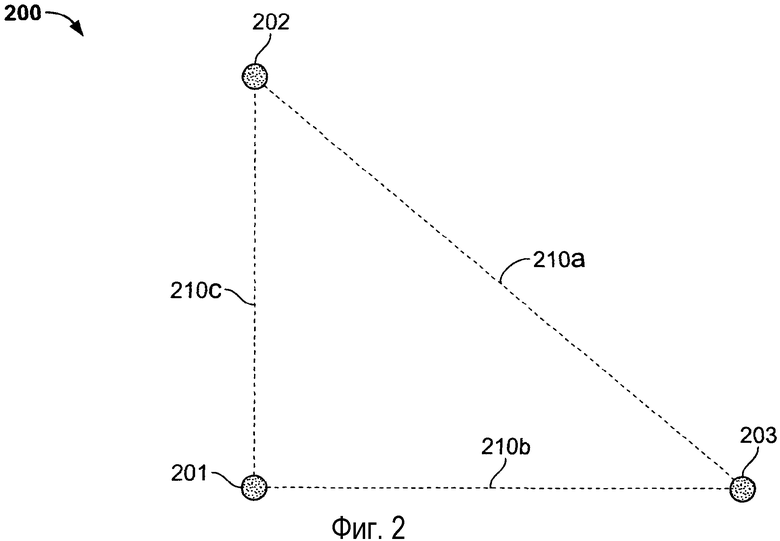
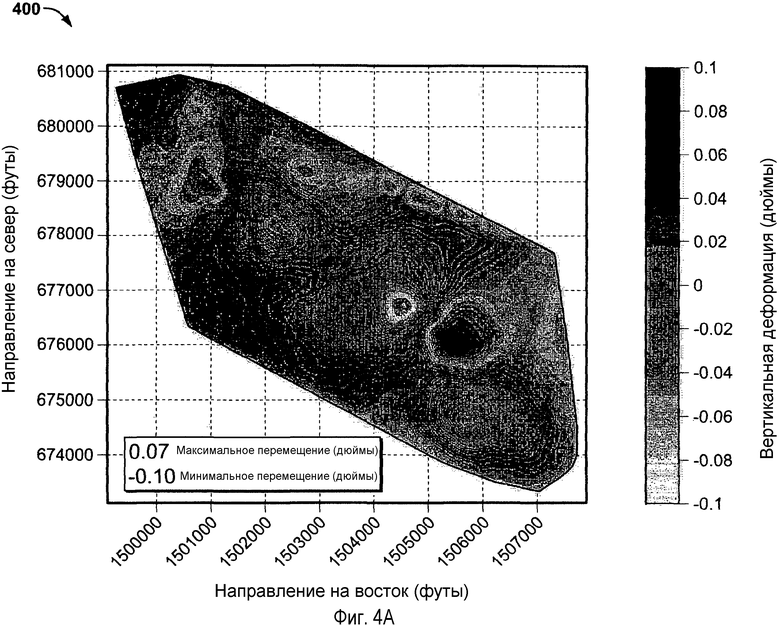
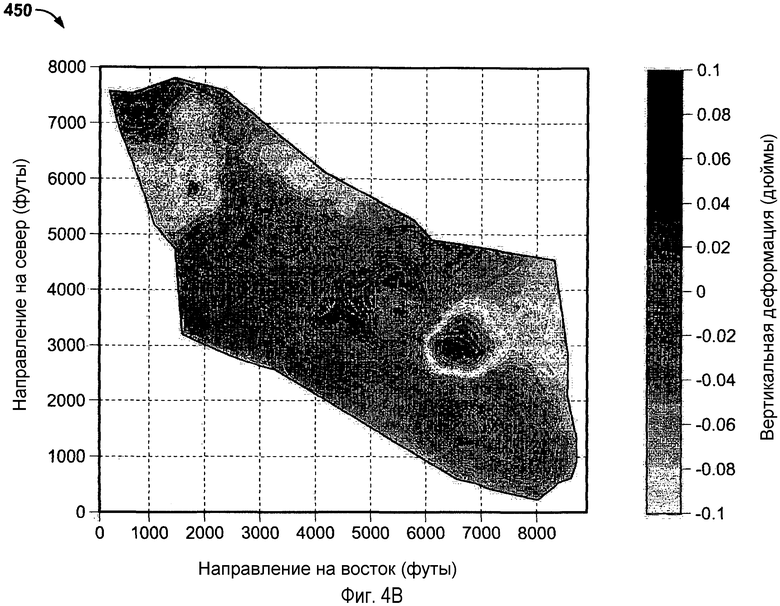
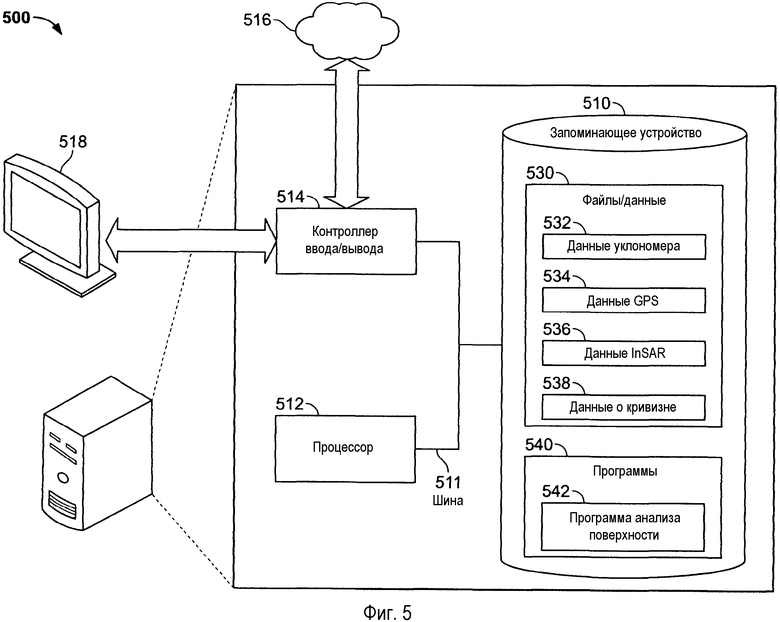
Изобретение относится к средствам оценки данных поверхности земли. Технический результат заключается в повышении точности модели географической области. Принимают геодезические данные для множества местоположений на поверхности, причем геодезические данные содержат информацию о градиенте поверхности по меньшей мере для подмножества местоположений на поверхности. Формируют набор ограничивающих соотношений на основе геодезических данных, при этом набор ограничивающих соотношений соотносит неопределенные значения для временных изменений в высотах поверхности в подмножестве местоположений на поверхности с информацией о градиенте поверхности, включенной в геодезические данные, множество ограничивающих соотношений включает в себя неопределенные значения для временных изменений в высоте поверхности в нескольких местоположениях на поверхности. Идентифицируют конкретные значения для временных изменений в высотах поверхности в каждом местоположении на поверхности в подмножестве на основе определения решения набора ограничивающих соотношений. 3 н. и 30 з.п. ф-лы, 7 ил.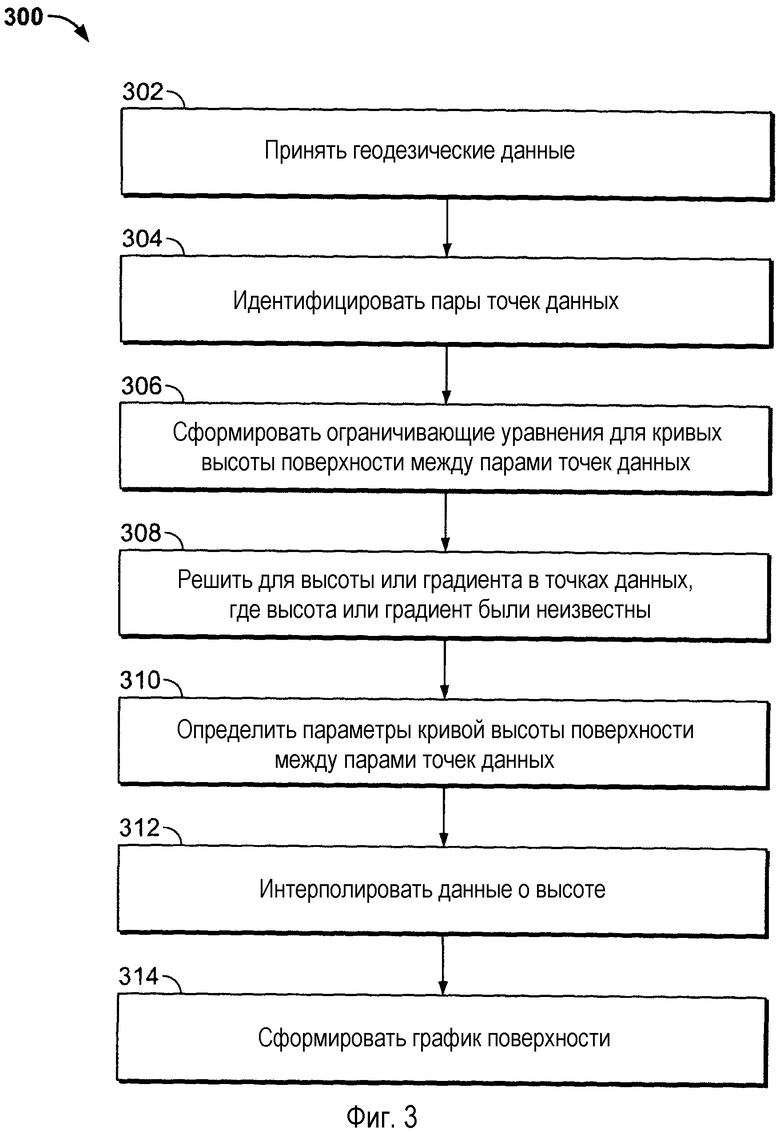
1. Система, содержащая:
базу данных, которая хранит геодезические данные, ассоциированные с географической областью, причем геодезические данные включают в себя информацию о градиенте поверхности по меньшей мере для подмножества местоположений на поверхности в географической области; и
процессор, работающий для выполнения операций, включающих:
формирование набора ограничивающих соотношений на основе геодезических данных, при этом набор ограничивающих соотношений соотносит неопределенные значения для временных изменений в высотах поверхности в подмножестве местоположений на поверхности с информацией о градиенте поверхности, включенной в геодезические данные, множество ограничивающих соотношений включает в себя неопределенные значения для нескольких высот поверхности; и
идентификацию конкретных значений для временных изменений в высотах поверхности в каждом местоположении на поверхности в подмножестве на основе определения решения набора ограничивающих соотношений.
2. Система по п.1, в которой геодезические данные содержат информацию о высоте поверхности для первого подмножества местоположений на поверхности и информацию о градиенте поверхности для второго подмножества местоположений на поверхности;
где набор ограничивающих соотношений соотносит неопределенные значения для временных изменений в градиентах поверхности в первом подмножестве местоположений на поверхности и неопределенные значения для временных изменений в высотах поверхности во втором подмножестве местоположений на поверхности с информацией о высоте поверхности и информацией о градиенте поверхности, включенных в геодезические данные, множество ограничивающих соотношений включает в себя несколько неопределенных значений; и
где идентификация конкретных значений для временных изменений в высотах поверхности в каждом местоположении на поверхности в подмножестве содержит идентификацию конкретных значений для временных изменений в градиентах поверхности для каждого из первого подмножества местоположений и конкретных значений для временных изменений в высоте поверхности для каждого из второго подмножества местоположений на поверхности на основе определения решения набора ограничивающих соотношений.
3. Система по п.2, дополнительно содержащая измерительную подсистему, которая получает геодезические данные для множества местоположений измерения, причем каждое из множества местоположений на поверхности соответствует одному из местоположений измерения.
4. Система по п.3, в котором измерительная подсистема содержит по меньшей мере одну из Системы глобального позиционирования (GPS) или системы Интерференционного радиолокатора с синтезированной апертурой (InSAR), которая формирует информацию о высоте поверхности, при этом информация о высоте поверхности включает в себя измерения временных изменений в высотах поверхности в первом подмножестве местоположений на поверхности.
5. Система по п.3 или 4, в которой измерительная подсистема содержит массив уклономеров, который формирует информацию о градиенте поверхности, при этом информация о градиенте поверхности включает в себя измерения временных изменений в градиентах поверхности в первом подмножестве местоположений на поверхности.
6. Система по п.1, в которой операции дополнительно содержат формирование модели географической поверхностной деформации в географической области на основе принятых геодезических данных и конкретных значений.
7. Система по п.1, в которой геодезические данные включают в себя измерения временных изменений в градиентах поверхности за множество периодов времени, где процессор работает для выполнений операций, дополнительно содержащих:
формирование набора ограничивающих соотношений для каждого из множества периодов времени; и
идентификацию конкретных значений для временных изменений в высотах поверхности для подмножества местоположений на поверхности для каждого периода времени на основе определения решения набора ограничивающих соотношений для каждого периода времени.
8. Система по п.7, в которой операции дополнительно включают в себя
формирование моделей географической поверхностной деформации для каждого периода времени; и
сопоставление временных изменений географической поверхности с полевыми работами, ассоциированными с географической областью.
9. Система по п.8, в которой операции дополнительно включают в себя анализ подземных геологических структур на основе временных изменений географической поверхности.
10. Реализуемый компьютером способ для оценивания поверхностных данных, содержащий этапы, на которых:
принимают геодезические данные для множества местоположений на поверхности в географической области, причем геодезические данные содержат:
измерения перемещения высоты поверхности для первого подмножества местоположений на поверхности на первой площади в географической области; и
измерения перемещения градиента поверхности для другого, второго, подмножества местоположений на поверхности на другой, второй, площади в географической области;
формируют набор ограничивающих соотношений на основе геодезических данных, при этом набор ограничивающих соотношений соотносит неопределенные значения для перемещений градиента поверхности в первом подмножестве местоположений на поверхности и неопределенные значения для перемещений высоты поверхности во втором подмножестве местоположений на поверхности с измерениями перемещения высоты поверхности и измерениями перемещения градиента поверхности, включенными в геодезические данные, множество ограничивающих соотношений включает в себя несколько неопределенных значений; и
идентифицируют конкретные значения для перемещения градиента поверхности в каждом из первого подмножества местоположений и конкретные значения для перемещения высоты поверхности в каждом из второго подмножества местоположений на поверхности на основе определения решения набора ограничивающих соотношений.
11. Способ по п.10, в котором измерения перемещения градиента поверхности включают в себя данные уклономера от массива уклономеров на второй площади в географической области, в котором измерения перемещения высоты поверхности включают в себя данные Интерференционного радиолокатора с синтезированной апертурой (InSAR) для первой площади практически вне периметра массива уклономеров.
12. Способ по п.10 или 11, дополнительно содержащий этап, на котором формируют конкретные значения коэффициентов для членов множества полиномиальных кривых высот на основе принятых геодезических данных, конкретных значений для перемещения градиента поверхности и конкретных значений для перемещения высоты поверхности, где каждая из множества полиномиальных кривых высот представляет временное изменение в высоте географической поверхности между соседними парами местоположений на поверхности.
13. Способ по п.12, в котором конкретные значения коэффициентов для членов множества полиномиальных кривых высот соответствуют поверхности минимальной кривизны.
14. Способ по п.12, дополнительно содержащий этап, на котором формируют графическое представление географической поверхностной деформации на первой площади и второй площади на основе полиномиальных кривых высот.
15. Способ по п.12, в котором конкретные значения коэффициентов соответствуют единственной поверхности минимальной кривизны для конкретных значений для перемещения градиента поверхности, конкретных значений для перемещения высоты поверхности и измерений в геодезических данных.
16. Способ по п.10, в котором этап, на котором формируют набор ограничивающих соотношений, содержит этап, на котором формируют одно или несколько уравнений, которые ограничивают неопределенные значения перемещения градиента поверхности в одной или нескольких парах из первого подмножества местоположений на поверхности значениями, которые приводят к минимальной кривизне поверхности.
17. Способ по п.10, в котором этап, на котором формируют набор ограничивающих соотношений, содержит этап, на котором формируют одно или несколько уравнений, которые ограничивают неопределенные значения перемещения высоты поверхности в одной или нескольких парах из второго подмножества местоположений на поверхности изменением в высоте низшего порядка.
18. Способ по п.10, дополнительно содержащий этапы, на которых:
формируют модель поверхностной деформации на основе принятых геодезических данных, конкретных значений для перемещения градиента поверхности и конкретных значений для перемещения высоты поверхности; и
идентифицируют временные изменения географической области на основе модели поверхностной деформации.
19. Способ по п.18, дополнительно содержащий по меньшей мере один из этапов, на которых:
сопоставляют временные изменения с полевыми работами, ассоциированными с географической областью; или
анализируют подземные геологические структуры на основе временных изменений.
20. Машиночитаемый носитель, кодированный с помощью команд, которые при исполнении выполняют операции, содержащие:
прием геодезических данных для множества местоположений на поверхности, причем геодезические данные содержат информацию о градиенте поверхности по меньшей мере для подмножества местоположений на поверхности;
формирование набора ограничивающих соотношений на основе геодезических данных, при этом набор ограничивающих соотношений соотносит неопределенные значения для временных изменений в высотах поверхности в подмножестве местоположений на поверхности с информацией о градиенте поверхности, включенной в геодезические данные, множество ограничивающих соотношений включает в себя неопределенные значения для временных изменений в высоте поверхности в нескольких местоположениях на поверхности; и
идентификацию конкретных значений для временных изменений в высотах поверхности в каждом местоположении на поверхности в подмножестве на основе определения решения набора ограничивающих соотношений.
21. Машиночитаемый носитель по п.20,
где геодезические данные содержат информацию о высоте поверхности для первого подмножества местоположений на поверхности и информацию о градиенте поверхности для второго подмножества местоположений на поверхности;
где набор ограничивающих соотношений соотносит неопределенные значения для временных изменений в градиентах поверхности в первом подмножестве местоположений на поверхности и неопределенные значения для временных изменений в высотах поверхности во втором подмножестве местоположений на поверхности с информацией о высоте поверхности и информацией о градиенте поверхности, включенных в геодезические данные, множество ограничивающих соотношений включает в себя несколько неопределенных значений; и
где идентификация конкретных значений для временных изменений в высотах поверхности в каждом местоположении на поверхности в подмножестве содержит идентификацию конкретных значений для временных изменений в градиентах поверхности в каждом из первого подмножества местоположений и конкретных значений для временных изменений в высотах поверхности в каждом из второго подмножества местоположений на поверхности на основе определения решения набора ограничивающих соотношений.
22. Машиночитаемый носитель по п.21, где геодезические данные содержат информацию о градиенте поверхности и информацию о высоте поверхности для третьего подмножества местоположений на поверхности и где набор ограничивающих соотношений включает в себя информацию о градиенте поверхности и информацию о высоте поверхности для третьего подмножества местоположений на поверхности.
23. Машиночитаемый носитель по п.21 или 22, где каждое из множества неопределенных значений включается в несколько ограничивающих соотношений и где каждое из ограничивающих соотношений, которое включает в себя несколько неопределенных значений, взятое отдельно, ограничивает без определения неопределенных значений в соотношении.
24. Машиночитаемый носитель по п.21, где набор ограничивающих соотношений содержит систему линейных уравнений и где идентификация конкретных значений для временных изменений в градиентах поверхности в первом подмножестве местоположений и конкретных значений для временных изменений в высотах поверхности во втором подмножестве местоположений содержит решение системы линейных уравнений.
25. Машиночитаемый носитель по п.21, где формирование набора ограничивающих соотношений содержит формирование одной или нескольких матриц и где решение набора ограничивающих соотношений содержит обращение одной или нескольких матриц.
26. Машиночитаемый носитель по п.21, в котором идентификация конкретных значений для временных изменений в градиентах поверхности и конкретных значений для временных изменений в высотах поверхности содержит решение набора ограничивающих соотношений на основе исключения по Гауссу или исключения по Гауссу-Жордану.
27. Машиночитаемый носитель по п.21, в котором геодезические данные дополнительно содержат информацию о координатах поверхности для каждого из местоположений на поверхности, при этом операции дополнительно содержат:
идентификацию соседних пар местоположений на поверхности на основе информации о координатах поверхности, где каждое из ограничивающих соотношений основывается на геодезических данных для соседней пары местоположений на поверхности; и
идентификацию параметров кривых высот между соседними парами местоположений на поверхности на основе принятых геодезических данных, конкретных значений для временных изменений в градиентах поверхности и конкретных значений для временных изменений в высотах поверхности, где кривая высоты между каждой соседней парой местоположений на поверхности представляет временное изменение в высоте поверхности между соседней парой местоположений на поверхности.
28. Машиночитаемый носитель по п.27, где местоположения на поверхности соответствуют области на поверхности Земли и операции дополнительно содержат вычисление временных изменений в высоте для других местоположений на поверхности в той области на основе параметров одной или нескольких кривых высот.
29. Машиночитаемый носитель по п.27, где идентификация соседних пар местоположений на поверхности содержит формирование триангуляции Делоне местоположений на поверхности на основе координат поверхности, при этом триангуляция Делоне содержит соединительные линии Делоне между каждой из соседних пар местоположений на поверхности.
30. Машиночитаемый носитель по п.27, где формирование набора ограничивающих соотношений содержит по меньшей мере одно из:
для каждой соседней пары местоположений на поверхности, где геодезические данные включают в себя значение t1 для временного изменения в градиенте поверхности в первой точке в соседней паре и значение t2 для временного изменения в градиенте поверхности во второй точке в соседней паре, ограничения неопределенного значения h1 для временного изменения в высоте поверхности в первой точке и неопределенного значения h2 для временного изменения в высоте поверхности во второй точке с помощью соотношения вида , где первая точка и вторая точка разделяются расстоянием l в соответствии с координатами поверхности;
для каждой соседней пары, где геодезические данные включают в себя значение h1 для временного изменения в высоте поверхности в первой точке в соседней паре и значение t2 для временного изменения в градиенте поверхности во второй точке в соседней паре, ограничения неопределенного значения t1 для временного изменения в градиенте поверхности в первой точке и неопределенного значения h2 для временного изменения в высоте поверхности во второй точке с помощью соотношения вида  , где первая точка и вторая точка разделяются расстоянием l в соответствии с координатами поверхности; или
, где первая точка и вторая точка разделяются расстоянием l в соответствии с координатами поверхности; или
для каждой соседней пары, где геодезические данные включают в себя значение h1 для временного изменения в высоте поверхности в первой точке в соседней паре и значение h2 для временного изменения в высоте поверхности во второй точке в соседней паре, ограничения неопределенного значения t1 для временного изменения в градиенте поверхности в первой точке и неопределенного значения t2 для временного изменения в градиенте поверхности во второй точке с помощью соотношения вида , где первая точка и вторая точка разделяются расстоянием l в соответствии с координатами поверхности.
31. Машиночитаемый носитель по п.21, где информация о высоте поверхности включает в себя данные, указывающие временные изменения в высотах поверхности на основе измерений по меньшей мере от одной из Системы глобального позиционирования (GPS) или системы Интерференционного радиолокатора с синтезированной апертурой (InSAR), и где информация о градиенте поверхности включает в себя данные, указывающие временные изменения в градиентах поверхности от массива уклономеров.
32. Машиночитаемый носитель по п.21, где каждое местоположение на поверхности во втором подмножестве соответствует местоположению измерения у станции-уклономера.
33. Машиночитаемый носитель по п.21, где каждое местоположение на поверхности в первом подмножестве соответствует по меньшей мере одному из местоположения измерения у приемника GPS или местоположения измерения у системы InSAR.
| US 7711532 B2, 04.05.2010 | |||
| US 7768441 B2, 03.08.201 | |||
| US 7660194 B2, 09.02.2010 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ И СИСТЕМА ДЛЯ ХРАНЕНИЯ И БЫСТРОГО ИЗВЛЕЧЕНИЯ ВЫСОТНЫХ ОТМЕТОК ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМАХ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2003 |
|
RU2326434C2 |

