Способ относится к контрольно-измерительной технике, а именно к области контроля и диагностики трубопроводов, и предназначен для оценки величин вертикальных и горизонтальных смещений их осей.
Уровень техники в данной области характеризуется следующими изобретениями. В универсальном диагностическом снаряде -дефектоскопе для контроля за состоянием трубопровода (патент 2111453, МКИ G 01 B 17/00, БИ 14, 1998) введена секция навигационных и высотно-плановых отметок, представляющая собой герметичный корпус, внутри которого размещен навигационный модуль, включающий командный прибор с трехосным гиростабилизатором, цифровой вычислительный комплекс и блок регистрирующей аппаратуры. В изобретении предлагается определять положение трубопровода в пространстве, его изменение по сравнению с предыдущими замерами и выявлять опасные участки напряжения и деформации от внешних и внутренних воздействий на трубопровод по энергетической теории прочности.
В этом техническом решении точность определения координат опасного сечения недостаточна из-за отсутствия информации о положении снаряда относительно трубопровода (в общем случае ось снаряда и трубопровода не совпадают из-за износа и деформации опорных элементов снаряда) и накопления во времени автономной инерциальной навигационной системой погрешностей определения координат.
Известна инерциальная мониторинговая система трубопроводов (патент США 4945775, МКИ G 01 C 9/06, 1990), в которой реализуется следующий способ:
1) система проходит по трубопроводу и измеряет динамические характеристики несущих снарядов внутри трубопровода относительно инерциальной системы координат в пространстве данного трубопровода;
2) записываются внутри несущих средств цифровые сигналы измерений динамических характеристик.
В качестве динамических характеристик измеряются: акселерометрами и гироскопами - кажущиеся ускорения и углы ориентации несущих средств по трем ортогональным направлениям; системой ультразвуковых датчиков - скорость и относительная ориентация несущих средств в трубопроводе. Обнаруживаются швы с помощью микрофона, аналоговые сигналы фильтруются, преобразуются в цифровые и калибруются динамические характеристики по швам трубопровода.
Недостатком этого способа является низкая точность определения локальных смещений трубопроводов из-за ухода гироскопов.
Наиболее близким аналогом предлагаемого изобретения является способ в устройстве для определения и регистрации геометрических параметров трубопроводов (патент RU 2102704, МКИ G 01 B 17/02, БИ 2, 1998). В этом патенте реализуется следующий способ:
1) внутритрубный инспектирующий снаряд пропускают внутри трубопровода;
2) трехкомпонентным измерителем угловой скорости и трехкомпонентным измерителем кажущегося ускорения измеряются в системе координат, связанной с внутритрубным снарядом, три компонента абсолютной угловой скорости и три компонента кажущегося ускорения;
3) одометром измеряются приращения пути снаряда, ультразвуковыми датчиками - его положение относительно стенок трубопровода;
4) результаты измерений записываются в памяти устройства вычислений и регистрации, а затем пересчитываются в текущие географические координаты местоположения снаряда и углы его ориентации, а также радиусы кривизны продольной оси трубопровода в вертикальной и горизонтальной плоскостях.
Недостатком этого технического решения является отсутствие методики определения воздействия внешних и внутренних факторов на точность определения локальных смещений газопроводов, выявления и прогнозирования опасных участков трубопроводов, а также компенсации накапливающихся во времени погрешностей навигационной системы за счет коррекции от других систем.
Задачей данного изобретения является повышение точности определения локальных смещений магистральных трубопроводов и выявление участков опасных напряжений и деформаций от внешних и внутренних воздействий на трубопровод.
Новым в предлагаемом способе является "n" пропусков снаряда в интервалы времени, характеризующиеся различными температурными, погодными условиями, определение температур по окружности трубы, давления газа на передней и задней стенках снаряда, определение сварных швов по сигналам гироскопов и акселерометров, нахождение критических точек с помощью GPS и инерциальной системы.
Техническим результатом предлагаемого способа является обеспечение возможности определения локальных смещений участков газопровода в географических или геодезических координатах для определения и прогнозирования на них стресс-коррозии и опасных механических напряжений. Это достигается тем, что в способе определения локальных смещений магистральных трубопроводов с помощью внутритрубных инспектирующих снарядов, включающем определение с помощью бесплатформенной системы ориентации и навигации трех компонентов вектора абсолютной угловой скорости и кажущегося ускорения внутритрубного инспектирующего снаряда, а с помощью одометра приращений его пути, с помощью ультразвуковых датчиков - его положения относительно трубопровода с записью в память бортового компьютера, внутритрубный инспектирующий снаряд пропускают n раз по одному и тому же участку трубопровода в интервалы времени, характеризующиеся различными установившимися температурными и погодными условиями, и при каждом пропуске определяют и записывают в память бортового компьютера в функции текущего времени и пройденного расстояния, мгновенную температуру и профиль по окружности трубы не менее чем в 8 равноудаленных точках, давление газа на передней и задней стенках внутритрубного инспектирующего снаряда, а затем после "n" пропусков внутритрубного инспектирующего снаряда с помощью стационарного компьютера определяют приращения всех измеренных параметров по отношению к соответствующим параметрам первого пропуска, а также градиенты температуры в горизонтальной и вертикальной плоскостях для одноименных точек сварных швов, привязанных к плоскости горизонта. Кроме того, по вышеназванному способу строят семейство графиков смещений трех координат продольной оси трубопровода, углов и радиусов ее искривлений в вертикальной и горизонтальной плоскостях в функции одноименных точек трубопровода в зависимости от номера пропуска внутритрубного инспектирующего снаряда, являющегося параметром семейства, находят места пучностей и узлов графиков смещений, по которым устанавливают критические точки механических напряжений, вызывающих стресс-коррозию трубопровода. Для реперных точек трубопровода с помощью стационарного компьютера определяют географические координаты по сигналам датчиков глобальной системы позиционирования и инерциальной системы ориентации и навигации с учетом сигналов одометров снаряда и сварных швов трубопровода и по выявленной разнице трех координат соответствующих реперных точек определяют параметры дрейфа инерциальной системы, по которым вносится коррекция в ее алгоритмы функционирования и вычисления локальных смещений трубопровода. При этом в вышеназванном способе семейство графиков выполняется в виде функции (уравнения) регрессии для одноименных критических точек, в которых измеряется температурный режим трубопровода
где к - номер измерения; Δхк, Δxко - приращения измеряемых параметров; ΔTг, ΔTв - градиенты температур в противоположных точках трубы в горизонтальной и вертикальной плоскостях; Т - средняя температура сечения трубы для измерений, лежащих в одной окружности; a11 к a12 к a13 к - коэффициенты уравнения регрессии; ΔР - градиент давления между передней и задней стенками снаряда; Р - давление в трубопроводе; a14 к a15 к - коэффициенты влияния давления и его перепада на смещение; и в промежутках времени между пропусками снарядов прогнозируют по статистическому уравнению регрессии возможные смещения оси трубопровода от грунтовой и ветровой нагрузок.
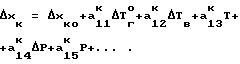
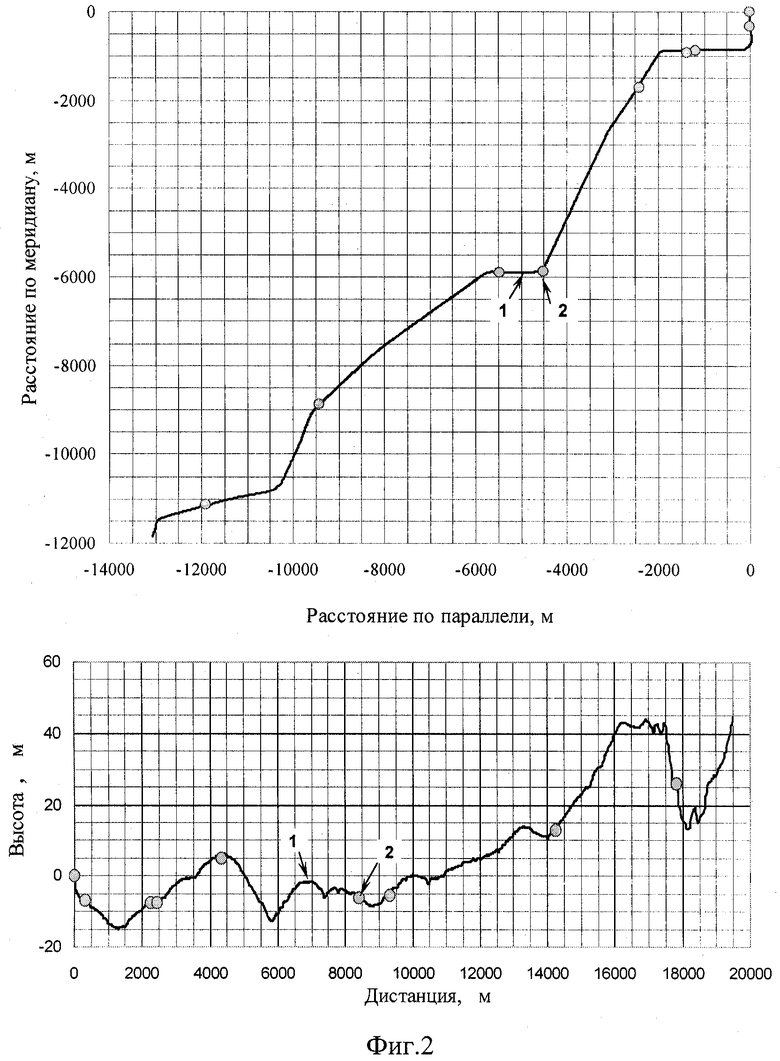
Изобретение поясняется чертежами устройства для реализации предложенного способа (фиг. 1); графиками траектории трассы трубопровода, построенной по сигналам БИСОН (фиг. 2); графиками продольных и поперечных ускорений при движении снаряда в трубопроводе (фиг.3).
Устройство для определения и регистрации геометрических параметров трубопроводов состоит из герметичного контейнера 1, выполненного со смещенным к боковой поверхности центром тяжести, эластичных манжет 2, жестко закрепленных в носовой и хвостовой частях контейнера 1, датчика пути 3, блока 4 вычислений и управления и регистратора 5, размещенных внутри контейнера 1, три ультразвуковых измерителей радиальных расстояний, состоящих из трех поясов по "n" каждый ультразвуковых приемопередающих преобразователей 6, 7, 8, размещенных на контейнере 1 в его носовой, средней и хвостовой частях и измерительных модулей, причем каждый пояс содержит соответственно приемопередающие преобразователи 6I, 6II, 6III, 7I, 7II, 7III, 8I, 8II, 8III, при этом номерами 6I, 7I, 8I; 6II, 7II, 8II, 6III, 7III, 8III и т.д. обозначены приемопередающие преобразователи, лежащие в рядах I, II, III и т.д. на образующих, параллельных продольной оси контейнера 1.
Чувствительные элементы приемопередающих преобразователей обращены в сторону внутренней поверхности трубопровода и в каждом из поясов они расположены попарно и диаметрально противоположно.
Выходы ультразвуковых измерителей 6, 7, 8 радиальных расстояний соединены с входом блока 4 вычислений и управления; жестко закреплены внутри контейнера 1 трехкомпонентный гироскопический измеритель 9 угловой скорости, трехкомпонентный измеритель 10 кажущегося ускорения, выходы которых соединены с входом блока 4 вычислений и управления, причем в состав ультразвуковых измерителей приемопередающих преобразователей входят измерительные модули 11. Герметичный контейнер 1 следует рассматривать в жесткой связи с системой координат OX1; ОХ2; ОХ3, причем OX1, OХ2 и ОХ3 - соответственно продольная, нормальная и поперечная оси устройства, ωx1, ωx2, ωx3- компоненты вектора абсолютной угловой скорости контейнера 1 и Wx1, Wx2, Wx3 - компоненты вектора кажущегося ускорения герметичного контейнера 1, измеряемые соответственно трехкомпонентным гироскопическим измерителем 9 угловой скорости и трехкомпонентным измерителем 10 кажущегося ускорения.
На фиг.1 показаны также колеса 12 герметичного контейнера 1 и трубопровод 13, с которым связана система координат Оξηζ, причем в начальный момент времени системы координат Оξηζ и ОХ1ОХ2ОХ3 совпадают. Устройство имеет аккумуляторную батарею 14 и датчики давления газа 15, датчики температуры трубы 16.
Для осуществления способа с помощью предлагаемого устройства производится определение координат маркерных точек в виде камер запуска приема, охранных кранов воздушных переходов на трассе газопровода аэрокосмическими методами или приемниками GPS. Герметичный контейнер 1 с манжетами 2, колесами 12 и включенным питанием от аккумулятора 14 к элементам, блокам устройства 3-11 вводится в трубопровод 13. При подаче давления газа контейнер 1 начинает двигаться относительно трубы 13. При этом записываются в блок вычислений и управления 4, регистратор 5 показания датчика пути 3, ультразвуковых измерителей радиальных расстояний между контейнером и трубами 6, 7, 8, трехкомпонентных измерителей угловой скорости 9 и кажущегося ускорения 10, а также датчика давления газа 15 и температур в сечении трубы 16. После извлечения контейнера из камеры приема информация переносится в стационарный компьютер и строится трасса в виде графиков расстояний по меридиану, параллели и высоте. При этом определяется по показаниям датчиков ускорений 10 количество сварных швов и учитываются известные расстояния между соответствующих реперных точек определяют параметры дрейфа инерциальной системы, а затем вносится коррекция в алгоритм вычисления координат трубопровода. Затем при других температурных и погодных условиях трубопровода повторяются вышеуказанные операции, строятся графики изменений координат, находят места пучностей и узлов графиков смещений, по которым устанавливают критические точки механических напряжений.
При получении информации от "n" пропусков инспектирующего снаряда результаты приращений координат получают в виде уравнения регрессии для части одноименных критических точек от градиентов и средних значений температуры трубы, давления в ней, т.е.
Статистическое уравнение регрессии локальных смещений магистральных трубопроводов позволяет прогнозировать возможные величины и их допускаемые границы.
Сказанное иллюстрируется графиками геодезических координат точек трубопровода (см. фиг.2, где 1 - траектория трассы трубопровода, построенная по сигналам БИСОН; 2 - реперные точки на трассе обследуемого трубопровода), полученных в результате пропуска внутритрубного инспектирующего снаряда с БИСОН (n=1) по трассе газопровода Екатериновка-Балашов. Планируется еще несколько пропусков снаряда по этой трассе. При первом пропуске в соответствии с п.3 формулы изобретения был определен дрейф БИСОН, после чего введена коррекция, за счет чего удалось повысить точность определения координат в четыре раза и снизить абсолютные погрешности до величин, определяемых погрешностями GPS.
Алгоритмы изменения кривизны оси трубопроводов от параметров внутреннего давления газа изложены в книге "Расчет и конструирование трубопроводов". Спр. пособие, - Л. "Машиностроение", 1979, с. 246, а глубин оттаивания грунтов основания под трубопроводами от температуры в "Справочнике по строительству на вечнозеленых грунтах"/Под.ред. Ю.Г.Велли и др., "Стройиздат", 1977, с. 552, а характер температурного поля вокруг трубы представлен в докладе на МК С.А. Тимашева "Остаточный ресурс, целостность и оптимизация технического обслуживания магистральных трубопроводов". Екатеринбург, 2000, с. 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| Способ измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода | 2017 |
|
RU2655614C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
Изобретение относится к области контроля и диагностики трубопроводов и предназначено для оценки величин вертикальных и горизонтальных смещений их осей с помощью внутритрубных инспектирующих снарядов. Способ включает определение с помощью бесплатформенной системы ориентации и навигации трех компонентов вектора абсолютной угловой скорости и кажущегося ускорения внутритрубного инспектирующего снаряда, а с помощью одометра - приращений его пути, с помощью ультразвуковых датчиков - его положения относительно трубопровода с записью в память бортового компьютера. Внутритрубный инспектирующий снаряд пропускают n раз по одному и тому же участку трубопровода в интервалы времени, характеризующиеся различными установившимися температурными и погодными условиями. При каждом пропуске определяют и записывают в память бортового компьютера в функции текущего времени и пройденного расстояния мгновенную температуру и профиль по окружности трубы не менее, чем в 8 равноудаленных точках, давление газа на передней и задней стенках внутритрубного инспектирующего снаряда. Затем после n пропусков внутритрубного инспектирующего снаряда с помощью стационарного компьютера определяют приращения всех измеренных параметров по отношению к соответствующим параметрам первого пропуска, а также градиенты температуры в горизонтальной и вертикальной плоскостях для одноименных точек сварных швов, привязанных к плоскости горизонта. Для реперных точек трубопровода с помощью стационарного компьютера определяют географические координаты по сигналам датчиков глобальной системы позиционирования и инерциальной системы ориентации и навигации с учетом сигналов одометров снаряда и сварных швов трубопровода и по выявленной разнице трех координат соответствующих реперных точек определяют параметры дрейфа инерциальной системы, по которым вносится коррекция в ее алгоритмы функционирования и вычисления локальных смещений трубопровода. Технический результат: обеспечение возможности определения локальных смещений участков газопровода в географических или геодезических координатах для определения и прогнозирования на них стресс-коррозии и опасных механических напряжений. 3 з.п. ф-лы, 3 ил.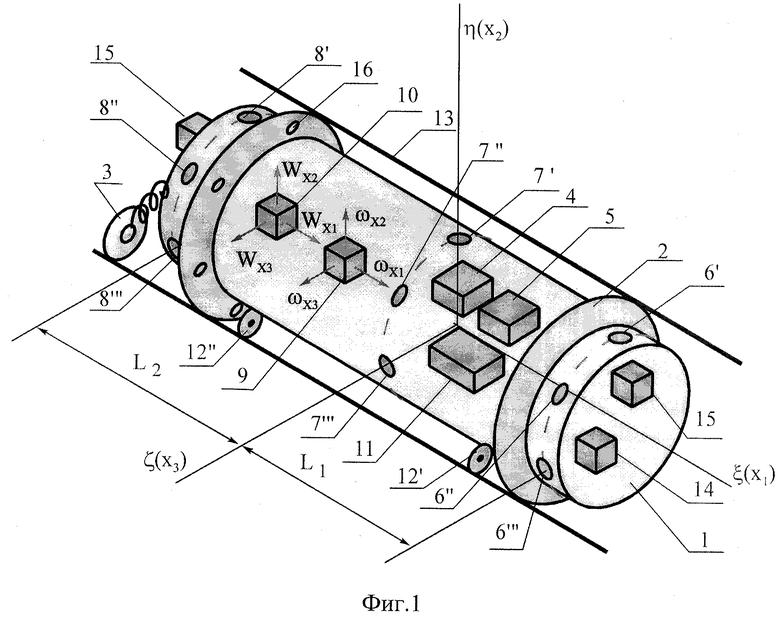
где к - номер измерения;
Δхк, Δхко - приращения измеряемых параметров;
ΔТг, ΔТв - градиенты температур в противоположных точках сечения трубы в горизонтальной и вертикальной плоскостях;
Т - средняя температура сечения трубы для измерений, лежащих в одной окружности;
а11 к, а12 к, а13 13 - коэффициенты уравнения регрессии;
ΔР - градиент давления между передней и задней стенками;
Р - давление в трубопроводе;
а14 к, а15 к - коэффициенты влияния давления и его перепада на смещение,
и в промежутках времени между пропусками снарядов прогнозируют по указанным функциям регрессии возможные смещения оси трубопровода.

