Описание
Настоящее изобретение относится, в общем случае, к спутниковым технологиям определения местоположения, в частности к способу кинематического определения местоположения в реальном времени со стационарным или подвижным опорным приемником.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В глобальной системе определения местоположения (GPS) для определения местоположения объектов на Земле используют спутники, расположенные в космосе. В системе GPS сигналы со спутников приходят в приемник глобальной системы определения местоположения (GPS) и используются для определения местоположения приемника системы GPS. В настоящее время для приемников системы GPS гражданского применения возможны два типа измерений в системе GPS, соответствующих каждому каналу коррелятора с сигналом, принятым со спутника глобальной системы определения местоположения (GPS). Двумя типами измерений в системе GPS являются измерения псевдодальности и фазы несущей для двух сигналов L1 и L2 несущей частоты с частотами 1,5754 ГГц (гигагерц) и 1,2276 ГГц или соответственно с длинами волн 0,1903 м и 0,2442 м. Основным объектом измерения в системе GPS является измерение псевдодальности (или измерение кода), которое могут производить все типы приемников системы GPS. При этом используют коды гражданского доступа (C/A) или псевдокоды (P), которыми модулированы сигналы несущей частоты. При измерении регистрируют истинное время, необходимое для прохождения соответствующего кода со спутника в приемник, то есть время, когда сигнал достигает приемника согласно часам приемника, за вычетом того времени, когда сигнал вышел со спутника согласно часам спутника. Результат измерения фазы несущей получают путем интегрирования восстановленной несущей сигнала при ее приходе в приемник. Таким образом, результат измерения фазы несущей также является мерой разности времени на прохождение сигнала, определяемой моментом времени, когда сигнал вышел из спутника согласно часам спутника, и моментом времени, когда он доходит до приемника согласно часам приемника. Однако, поскольку тогда, когда приемник начинает отслеживать фазу несущей сигнала, начальное количество целых периодов при прохождении сигнала между спутником и приемником обычно является неизвестным, то разность времени на прохождение сигнала может иметь ошибку на множество периодов несущей, то есть при измерении фазы несущей имеется неопределенность на целое число периодов.
При наличии результатов измерений системы GPS, дальность или расстояние между приемником системы GPS и каждым из множества спутников вычисляют путем умножения времени прохождения сигнала на скорость света. Эти значения дальности обычно именуют значениями псевдодальности (ложными значениями дальности), поскольку часы приемника обычно имеют существенную ошибку по времени, которая вызывает общую систематическую погрешность измеренной дальности. Эту общую систематическую погрешность, вызванную погрешностью часов приемника, вычисляют вместе с вычислением координат положения приемника в качестве части обычных навигационных вычислений. Различные иные факторы, в том числе погрешности эфемериды, ошибка синхронизации часов спутника, атмосферные эффекты, шумы приемника и погрешности из-за многолучевого распространения сигнала также могут привести к погрешностям или к шумам в вычисленной дальности. При автономной навигации в системе GPS, когда пользователь, имеющий приемник системы GPS, получает значения дальности, вычисленные по коду и/или по фазе несущей, относительно множества спутников, находящихся в пределах видимости, без сверки с какой-либо опорной станцией, то этот пользователь очень ограничен по способам уменьшения погрешностей или шумов в значениях дальности.
Для устранения или уменьшения этих погрешностей в областях применения глобальной системы определения местоположения (GPS) обычно используют дифференциальные операции. Функционирование дифференциальной системы GPS (DGPS) обычно включает в себя использование основного опорного приемника системы GPS, пользовательского (или навигационного) приемника системы GPS и канала передачи данных между пользовательским и опорным приемниками. Опорный приемник расположен в известном местоположении, и полученные в нем результаты измерения подают в пользовательский приемник. Путем вычисления разности между результатами измерений, проведенных в опорной станции и в пользовательском приемнике, может быть устранена большая часть погрешностей или шумов в вычисленных значениях дальности, или они могут быть уменьшены. Дифференциальные операции с использованием измерения фазы несущей часто именуют операциями кинематического определения местоположения/навигации в реальном времени (RTK).
Фундаментальная концепция дифференциальной системы GPS (DGPS) состоит в целесообразном использовании пространственных и временных корреляций погрешностей, свойственных измерениям, производимым в системе GPS, для устранения факторов шума при измерениях псевдодальности и/или фазы несущей, являющихся следствием этих факторов, приводящих к погрешности. Когда расстояние между опорными и пользовательскими приемниками не превышает определенного предела, то дифференциальный способ на основе фазы несущей или способ кинематических измерений в реальном времени (RTK) являются самыми точными из имеющихся способов для задач определения местоположения и навигации. Однако точность способов кинематических измерений в реальном времени (RTK) снижается при уменьшении корреляции факторов, приводящих к погрешности, когда расстояние между опорным и пользовательским приемниками становится слишком большим.
Для работы на больших территориях были разработаны различные способы для региональных, широкозонных или глобальных дифференциальных систем определения местоположения (DGPS) (ниже именуемых широкозонной системой DGPS или WADGPS). Система WADGPS содержит сеть из множества опорных станций, поддерживающих связь с вычислительным центром или концентратором. Значения поправок для коррекции погрешностей вычисляют в концентраторе на основании сведений об известных местах расположения опорных станций и результатов проведенных ими измерений. Вычисленные значения поправок для коррекции погрешностей затем передают пользователям по каналу передачи данных, например, по спутниковому, телефонному или радиоканалу передачи данных. Несмотря на повышение точности систем WADGPS за счет использования множества опорных станций, она не может соответствовать точности локальной системы кинематического определения местоположения в реальном времени (RTK), которая способна обеспечивать достижение точностей порядка одного сантиметра при условии, что расстояние между опорным и пользовательским приемниками весьма невелико.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В способе и в системе согласно одному из вариантов осуществления настоящего изобретения определяют вектор относительного положения между первичным приемником, соответствующим опорной станции, и вторичным приемником, соответствующим пользователю, следующим образом: (1) определяют местоположение опорной станции согласно принятым в ней сигналам от множества спутников; (2) определяют местоположение пользовательского приемника на основании полученных в нем результатов измерений и на основании значений поправок для коррекции погрешностей, вычисленных в опорной станции; и (3) вычисляют вектор относительного положения путем вычисления разности между местоположением опорной станции и местоположением пользователя. Каждый из приемников: пользовательский приемник и опорный приемник, могут быть подвижным или стационарным. Вычисление вектора относительного положения может быть произведено в опорной станции, в пользовательской аппаратуре или в отдельной системе обработки данных, которая получает сведения о местоположении опорной станции из опорной станции и сведения о местоположении пользователя от пользователя. В приведенном ниже описании местоположение опорной станции иногда именуют "опорным местоположением". Аналогичным образом, местоположение пользователя иногда именуют "местоположением пользователя".
В одном из вариантов осуществления настоящего изобретения производят обновление сведений о местоположении опорной станции или пользователя с высокой частотой, используя последовательные изменения в результатах измерения фазы несущей, полученных соответственно в опорной станции или в пользовательской аппаратуре. В опорной станции или в пользовательской аппаратуре также выполняют параллельный процесс с низкой частотой для обеспечения периодических поправок для сведений о местоположении для соответствующих обновлений сведений о местоположении, производимых с высокой частотой. Вычисление вектора относительного положения может производиться с высокой частотой, или с низкой частотой, либо с какой-либо иной частотой, в зависимости от наличия сведений об обоих местоположениях: о местоположении пользователя и об опорном местоположении, которые необходимы для вычислений.
Значения поправок для коррекции погрешностей измерений вычисляют в опорной станции путем формирования результатов измерения кода, сглаженных по несущей, путем вычисления поправок для оцененного местоположения опорной станции с использованием результатов измерения кода, сглаженных по несущей, путем вычисления теоретической дальности от опорной станции до каждого из множества спутников и путем вычисления значений поправок для коррекции погрешностей на основании теоретических значений дальности. Значения поправок для коррекции погрешностей передают из опорной станции пользователю по каналу передачи данных между пользователем и опорной станцией.
За счет вычисления в опорной станции значений поправок для коррекции погрешностей и опорного местоположения, настоящее изобретение сводит к минимуму передачу необходимой информации между опорным и пользовательским приемниками. Это также обеспечивает возможность вывода сведений о местоположении с высокой частотой при минимальном увеличении загрузки линии связи между опорным и пользовательским приемниками. Кроме того, настоящее изобретение обеспечивает распределение объема необходимых вычислений между опорным приемником и пользовательским приемником естественным образом, вследствие чего вычислительная нагрузка не является избыточной ни в опорном, ни в пользовательском приемнике. Кроме того, настоящее изобретение сводит к минимуму задержку при выводе обновлений для сведений о местоположении пользователя, не требуя от пользователя использовать синхронизированные данные из опорного приемника.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг.1 изображена схема, на которой проиллюстрирована спутниковая навигационная система согласно одному из вариантов осуществления настоящего изобретения.
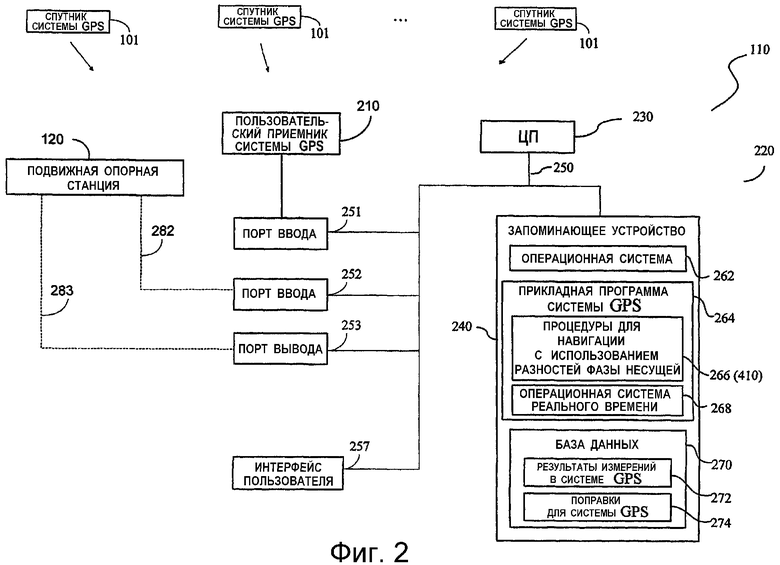
На Фиг.2 изображена блок-схема навигационной подсистемы, соответствующая пользователю спутниковой навигационной системы, согласно одному из вариантов осуществления настоящего изобретения.
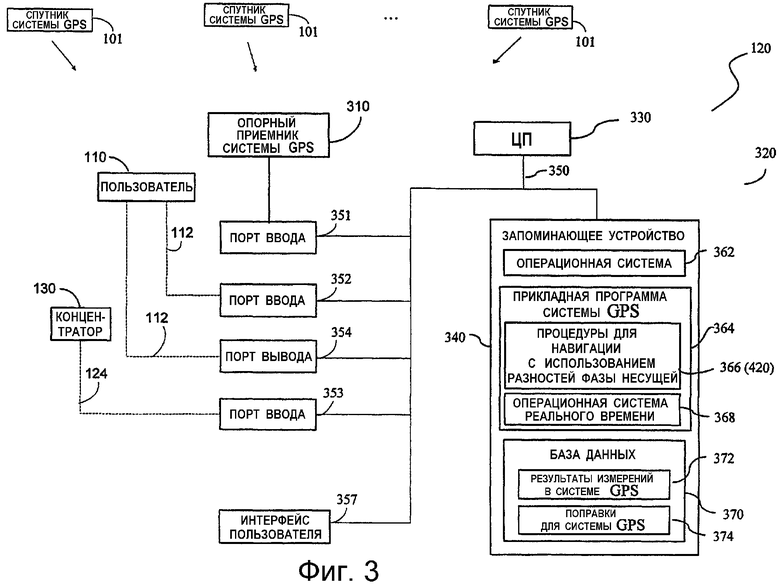
На Фиг.3 изображена блок-схема навигационной подсистемы, соответствующая подвижной опорной станции в навигационной системе, согласно одному из вариантов осуществления настоящего изобретения.
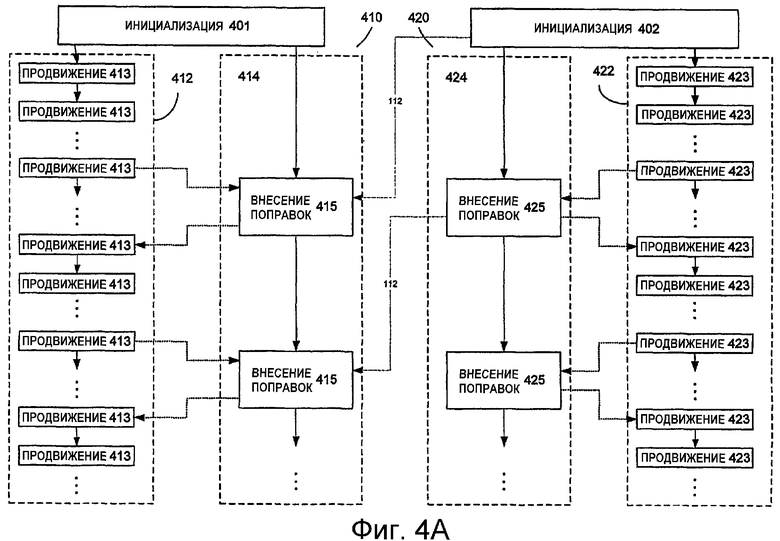
На Фиг.4A изображена схема последовательности операций, на которой проиллюстрированы навигационные операции, выполняемые пользовательской подсистемой и опорной подсистемой, согласно одному из вариантов осуществления настоящего изобретения.
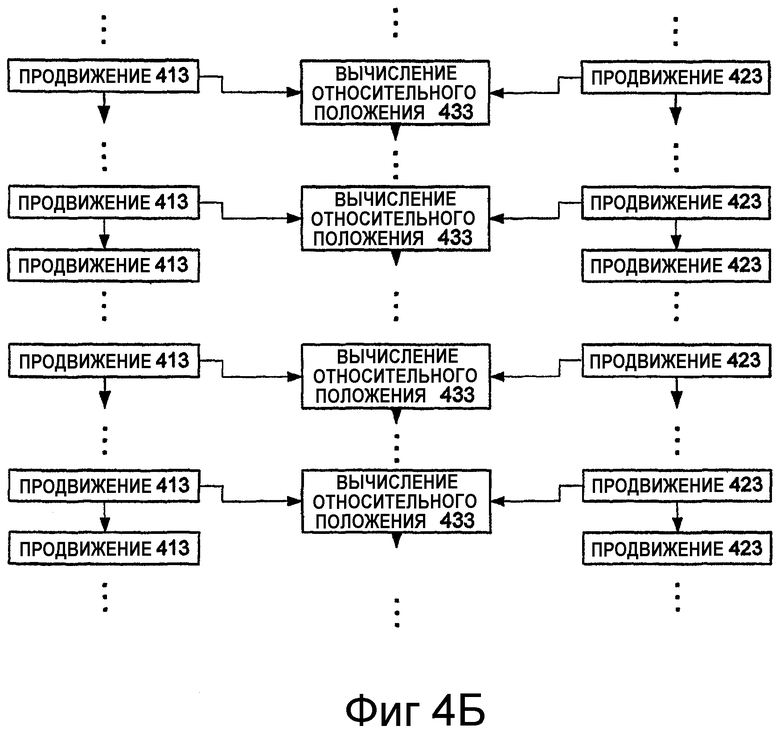
На Фиг.4Б изображена схема последовательности операций, на которой проиллюстрирована последовательность операций для вычисления обновлений для вектора относительного положения.
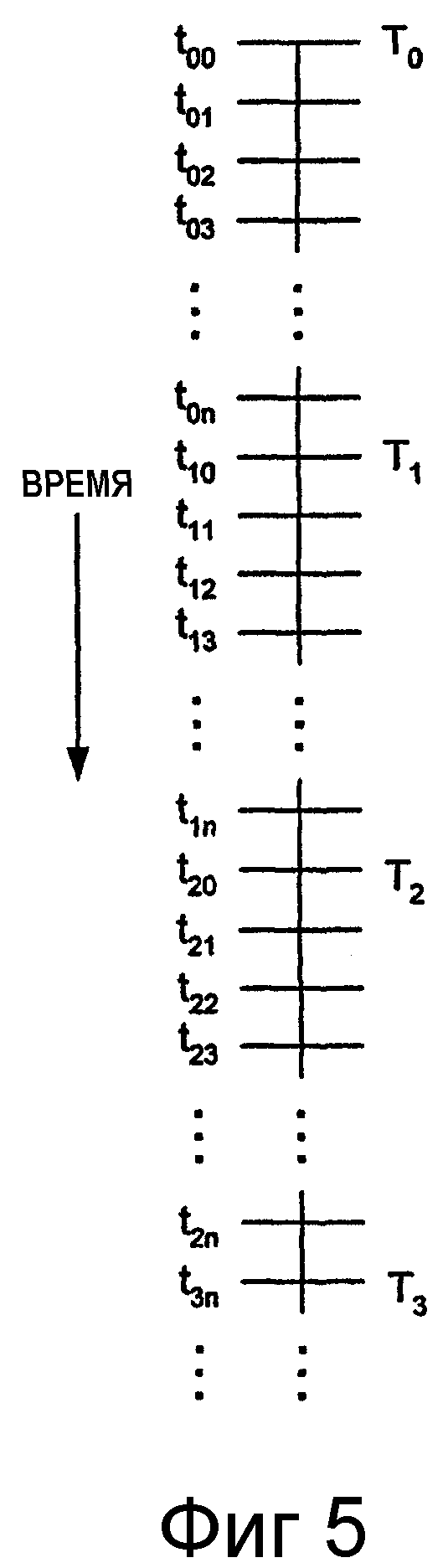
На Фиг.5 изображена диаграмма, на которой проиллюстрированы две параллельные последовательности интервалов времени, используемых пользовательской подсистемой или опорной подсистемой.
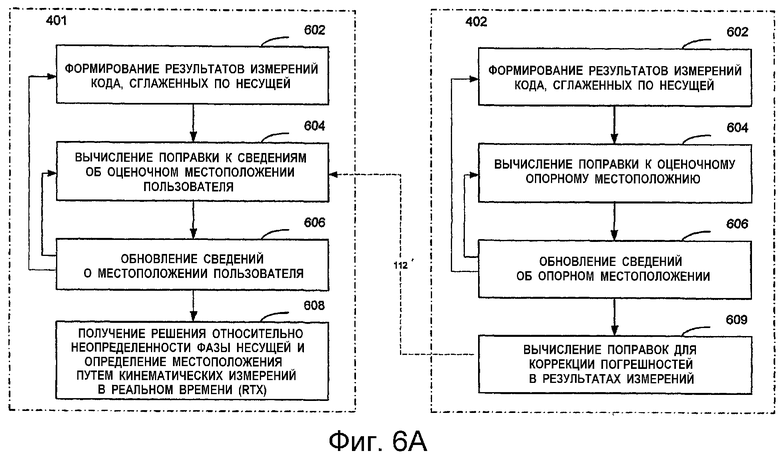
На Фиг.6A изображена схема последовательности операций, на которой проиллюстрированы операции инициализации, выполняемые соответственно пользовательской подсистемой и опорной подсистемой согласно одному из вариантов осуществления настоящего изобретения.
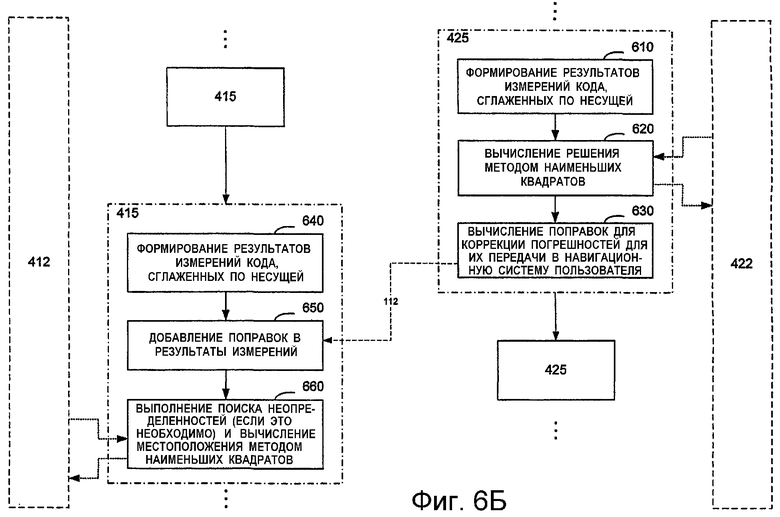
На Фиг.6Б изображена схема последовательности операций, на которой проиллюстрированы операции введения поправок для данных о местоположении, выполняемые соответственно пользовательской подсистемой и опорной подсистемой согласно одному из вариантов осуществления настоящего изобретения.
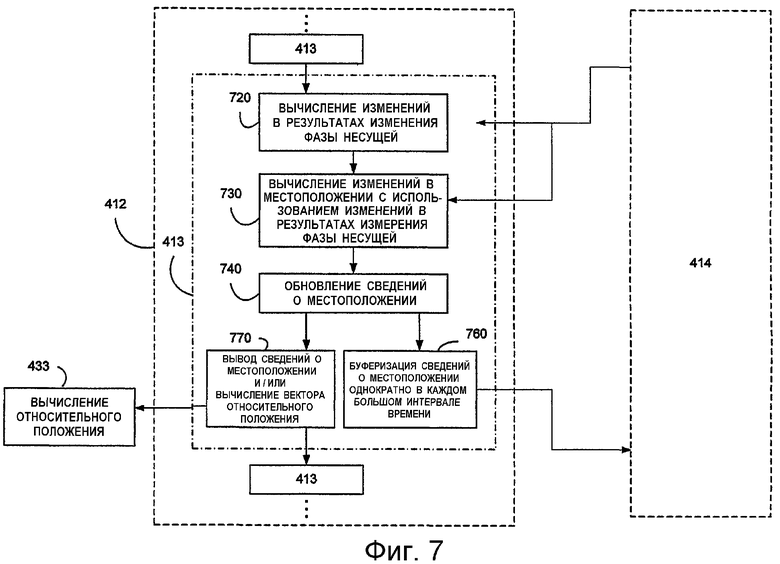
На Фиг.7 изображена схема последовательности операций, на которой проиллюстрирована операция обновления сведений о местоположении при продвижении, выполняемая пользовательской подсистемой согласно одному из вариантов осуществления настоящего изобретения.
ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Для преодоления недостатков обычных систем кинематических измерений в реальном времени (RTK) при сохранении той же самой точности была разработана концепция подвижной опорной станции. Однако, все обычные способы с использованием подвижных опорных станций, содержат операцию формирования разностей результатов измерения фазы несущей между пользовательским приемником и подвижной опорной станцией и операцию непосредственного вычисления решения для вектора разнесения между пользовательским приемником и подвижной опорной станцией. Также в литературе описаны способы относительной навигации для множества транспортных средств. Однако в этих способах обычно использовалась общая стационарная опорная точка.
На Фиг.1 проиллюстрирована спутниковая навигационная система 100, в которой могут быть реализованы процедуры навигации согласно одному из вариантов осуществления настоящего изобретения. Как показано на Фиг.1, система 100 содержит пользовательскую подсистему 110, соответствующую подвижному или стационарному объекту 110A, и опорную подсистему 120, соответствующую подвижному или стационарному объекту 120A. Пользовательская подсистема 110 и опорная подсистема 120 соединены друг с другом способом, обеспечивающим связь между ними через канал передачи данных, который позволяет осуществлять передачу данных между этими двумя подсистемами 110 и 120 с использованием такого средства, как, например, радиочастотные сигналы. Опорная подсистема 120 также может быть связана через канал 123 передачи данных с локальной стационарной опорной станцией 130. Локальной стационарной опорной станцией 130 может являться одна из сети стационарных опорных станций 130 в глобальной или широкозонной спутниковой навигационной сети. В этом случае сеть стационарных опорных станций 130 находится в известных местах расположения на обширной территории 105 или вокруг земного шара и непрерывно предоставляет величины, измеряемые в системе GPS в один или большее количество концентраторов 140 широкозонной или глобальной спутниковой навигационной сети для их обработки. Этими измеряемыми величинами являются, в том числе, код глобальной системы определения местоположения (GPS) и результаты измерения фазы несущей, эфемериды и иная информация, полученная согласно сигналам, принятым из множества спутников 101 в стационарных опорных станциях 130. Концентраторы 140 представляют собой аппаратные средства, в которых производят обработку величин, измеряемых системой GPS, и вычисление поправок. При наличии множества независимых концентраторов предпочтительно, чтобы они являлись территориально рассредоточенными и функционировали параллельно. Опорная подсистема 120 может дополнительно или возможно, но не обязательно, получать результаты вычислений, например, поправок для системы GPS из концентраторов 140, производящих обработку данных, через канал 124 связи, которым является, например, канал спутникового вещания, беспроводное соединение с сетью Интернет и т.д. Опорная подсистема 120 расположена так, как необходимо, при этом, объект 120A используют для поддержки канала 112 передачи данных, обеспечивающего связь с пользовательской подсистемой 110 системы GPS, и канала 123 передачи данных, обеспечивающего связь с соседней стационарной опорной станцией 130 или с концентратором 140.
На Фиг.2 проиллюстрирована пользовательская подсистема 110 согласно одному из вариантов осуществления настоящего изобретения. Подсистема 110 содержит пользовательский приемник 210 системы GPS и компьютерную систему 220 на основе микропроцессора, соединенную с пользовательским приемником 210. Пользовательский приемник 210 присоединен к объекту 110A и подает исходные величины, измеряемые системой GPS, в систему 220 для их обработки. Этими измеряемыми величинами являются, в том числе, код системы GPS и результаты измерения фазы несущей, и они также могут содержать эфемериды и иную информацию, полученную согласно сигналам, принятым из множества спутников 101. Компьютерная система 220 содержит центральный процессор (ЦП) 230, запоминающее устройство 240, порты 251 и 252 ввода, один или большее количество портов 253 вывода и необязательный интерфейс 257 пользователя, которые связаны между собой одной или большим количеством шин 250 связи. Порты 251 и 252 ввода предназначены для приема данных соответственно из пользовательского приемника 210 и из опорной подсистемы 120. Порт(ы) 253 вывода может быть использован для вывода результатов вычислений в подвижную опорную станцию 120 и/или в иную систему (иные системы) обработки данных (которые на чертеже не показаны). Результаты вычислений также могут быть показаны на дисплее интерфейса 257 пользователя.
Запоминающее устройство 240 может содержать высокоскоростное оперативное запоминающее устройство и может содержать энергонезависимое запоминающее устройство большой емкости, например, одно или большее количество запоминающих устройств на магнитных дисках. Запоминающее устройство 240 может также содержать запоминающее устройство большой емкости, которое расположено на удалении от центрального процессора 230. В предпочтительном варианте в запоминающем устройстве 240 хранится операционная система 262 и прикладные программы или процедуры 264 системы GPS, в том числе процедуры 266, реализующие способ навигации с использованием последовательных изменений результатов измерения фазы несущей согласно одному из вариантов осуществления настоящего изобретения. Операционная система 262 и прикладные программы и процедуры 264, хранящиеся в запоминающем устройстве 240, предназначены для их выполнения центральным процессором (ЦП) 230 компьютерной системы 220. В предпочтительном варианте в запоминающем устройстве 240 также хранится база 270 данных, содержащая структуры данных, используемые при выполнении процедур 266 прикладных программ системы GPS, например, измерений 272, выполняемых системой GPS, и вычислений поправок 274, а также иные структуры данных, рассмотренные в этом документе. Операционной системой 262 может являться встроенная операционная система, операционная система UNIX, операционная система Solaris или операционная система Windows 95, Windows 98, Windows NT 4.0, Windows 2000 или Windows XP, но эти примеры не являются ограничивающим признаком. Более широко, операционная система 262 содержит процедуры и команды для обеспечения передачи данных, обработки данных, обеспечения доступа к данным, запоминания и поиска данных.
По изложенным ниже причинам в запоминающем устройстве 240 также может храниться операционная система 268 реального времени, ОСРВ (RTX), которая представляет собой компьютерную программу для выполнения операций в многозадачном режиме в реальном масштабе времени. В одном из вариантов осуществления настоящего изобретения операционная система 268 реального времени (RTX) позволяет встраивать операционную систему 262 в процедуры 266 таким образом, чтобы обеспечить многопоточно, вследствие чего различные задачи в процедурах 266 могут выполняться "квазиодновременно", а это означает, что различные задачи могут казаться выполняемыми одновременно, и что система 220 может представляться одновременно выполняющей различные задания. Это позволяет процедурам 266 содержать в себе две или большее количество параллельных задач или процессов, выполняемых в различных потоках. Операционная система 268 реального времени (RTX) управляет запуском и остановкой каждого из потоков и позволяет обеспечивать взаимодействие потоков друг с другом. Операционная система 268 реального времени (RTX) также обеспечивает возможность формирования очередей данных для потока выполняемых задач, передачи данных между потоками выполняемых задач и преобразования процесса в последовательный режим путем поддержания надлежащего порядка событий.
Кроме того, операционная система 268 реального времени (RTX) поддерживает стандартные средства управления многопоточным процессом, которые, например, при выполнении потока дают возможность ожидания возникновения событий, инициированных событиями в другом потоке выполняемых задач. Событие представляет собой состояние, которое может быть установлено или аннулировано для потока. Когда поток задан таким образом, что находится в режиме ожидания того, когда произойдет одно или большее количество событий, то выполнение потока задач приостанавливают до тех пор, пока не произойдут все события. Это существенно упрощает синхронизацию и связь между потоками. В операционной системе 268 реального времени (RTX) выполнение потока производят на основании приоритета. Поток с более высоким приоритетом выполняют перед выполнением потока с более низким приоритетом. Среди потоков с одинаковым приоритетом потоки выполняют по циклическому алгоритму. Для каждого потока выделяют интервал времени, в котором его следует выполнять. В качестве операционной системы 268 реального времени может быть использована серийно выпускаемая ОСРВ (RTX), имеющаяся в свободной продаже. Примерами таких серийно выпускаемых операционных систем реального времени являются, в том числе, операционная система реального времени "CMX-RTX" фирмы "CMX Systems, Inc.", ОСРВ для параллельного выполнения задач ("Concurrent Real time Executive" ("CORTEX")) австралийской фирмы "Australian Real Time Embedded Systems (ARTESYS)" и ОСРВ "Nucleus RTX " фирмы "Accelerated Technology Inc.".
В некоторых вариантах осуществления изобретения пользовательский приемник 210 и вся компьютерная система 220 или ее часть объединены в единое устройство, расположенное в едином корпусе, например в виде портативного, карманного или даже носимого устройства отслеживания местоположения, либо являются установленными на транспортном средстве или представляют собой иную мобильную систему определения местоположения и/или навигационную систему. В других вариантах осуществления изобретения приемник 210 системы GPS и компьютерная система 220 не являются объединенными в единое устройство.
На Фиг.3 проиллюстрирована опорная подсистема 120 согласно одному из вариантов осуществления настоящего изобретения. Подсистема 120 содержит опорный приемник 310 системы GPS и компьютерную систему 320 на основе микропроцессора, соединенную с опорным приемником 310. Опорный приемник 310 присоединен к объекту 120A и подает исходные величины, измеряемые системой GPS, в систему 320 для их обработки. Этими измеряемыми величинами являются, в том числе, код системы GPS и результаты измерения фазы несущей, и они также могут содержать эфемериды и иную информацию, полученную согласно сигналам, принятым из множества спутников 101. Компьютерная система 320 содержит центральный процессор (ЦП) 330, запоминающее устройство 340, порты 351, 352 и 353 ввода, один или большее количество портов 354 вывода и необязательный интерфейс 357 пользователя, которые связаны между собой одной или большим количеством шин 350 связи. Порты 351, 352 и 353 ввода предназначены для приема данных соответственно из опорного приемника 310, пользовательской подсистемы 110 и из стационарной опорной станции 130 или концентратора 140. Порты 354 вывода могут быть использованы для вывода результатов вычислений в пользовательскую подсистему 110 и/или в другие системы обработки данных (которые на чертеже не показаны). Результаты вычислений также могут быть показаны на дисплее интерфейса 357 пользователя.
Запоминающее устройство 340 может содержать высокоскоростное оперативное запоминающее устройство и может содержать энергонезависимое запоминающее устройство большой емкости, например одно или большее количество запоминающих устройств на магнитных дисках. Запоминающее устройство 340 может также содержать запоминающее устройство большой емкости, которое расположено удаленно от центрального процессора 330. В предпочтительном варианте в запоминающем устройстве 340 хранится операционная система 362 и прикладные программы или процедуры 364 системы GPS, в том числе процедуры 366, реализующие способ навигации с использованием последовательных изменений результатов измерения фазы несущей согласно одному из вариантов осуществления настоящего изобретения. Операционная система 362 и прикладные программы и процедуры 364, хранящиеся в запоминающем устройстве 340, предназначены для их выполнения центральным процессором (ЦП) 330 компьютерной системы 320. В предпочтительном варианте в запоминающем устройстве 340 также хранится база 370 данных, содержащая структуры данных, используемые при выполнении процедур 366 прикладных программ системы GPS, например, измерений 372, выполняемых системой GPS, и вычислений поправок 374, а также иные структуры данных, рассмотренные в этом документе. Операционная система 362 является аналогичной операционной системе 262. По изложенным ниже причинам в запоминающем устройстве 340 также может храниться операционная система 368 реального времени (RTX), аналогичная операционной системе 268 реального времени (RTX).
В некоторых вариантах осуществления изобретения опорный приемник 310 и вся компьютерная система 320 или ее часть объединены в единое устройство, расположенное в едином корпусе, например в виде портативного, карманного или даже носимого устройства отслеживания местоположения, либо являются установленными на транспортном средстве или представляют собой иную мобильную систему определения местоположения и/или навигационную систему. В других вариантах осуществления изобретения приемник 310 системы GPS и компьютерная система 320 не являются объединенными в единое устройство.
На Фиг.4A проиллюстрирован процесс 410 навигации, выполняемый пользовательской подсистемой 110, который реализован в процедурах 266, и процесс 420 навигации, выполняемый опорной подсистемой 120, который реализован в процедурах 366, согласно одному из вариантов осуществления настоящего изобретения. Как показано на Фиг.4A, процесс 410 навигации содержит последовательность 401 операций инициализации и две параллельных последовательности операций: последовательность 412 операций, выполняемую с высокой частотой, и последовательность 414 операций, выполняемую с низкой частотой. Последовательность 401 операций инициализации используют для вычисления исходного местоположения пользовательского приемника 210, присоединенного к объекту 110A, и иных исходных параметров, требуемых для последовательности 412 операций, выполняемой с высокой частотой. Последовательность 412 операций, выполняемая с высокой частотой, содержит последовательность операций 413 обновления сведений о местоположении при продвижении, при каждой из которых вычисляют обновления для сведений о местоположении пользователя в одном из последовательности малых интервалов времени. Последовательность 414 операций, выполняемых с низкой частотой, содержит последовательность 415 операций введения поправок в сведения о местоположении, при каждой из которых производят вычисление поправок к сведениям о местоположении пользователя в одном из последовательности больших интервалов времени. Как показано на Фиг.5, в каждом большом интервале Tm времени может содержаться несколько, например 10, малых интервалов tmn времени (m=0, 1, 2, 3,... и n=0, 1, 2, 3,...). Если вычисленные сведения о местоположении не требуется получать с высокой частотой, то малые интервалы времени также могут совпадать с большими интервалами времени.
Аналогичным образом, как также показано на Фиг.4A, процесс 420 навигации содержит последовательность 402 операций инициализации и две параллельных последовательности операций: последовательность 422 операций, выполняемую с высокой частотой, и последовательность 424 операций, выполняемую с низкой частотой. Последовательность 402 операций инициализации используют для вычисления исходного местоположения опорного приемника 310 и иных исходных параметров, требуемых для последовательности 422 операций, выполняемой с высокой частотой. При последовательности 402 операций инициализации также может быть произведено вычисление поправок к результатам измерения, используемых при обработке в пользовательской подсистеме 110. Последовательность 422 операций, выполняемая с высокой частотой, содержит последовательность операций 423 обновления сведений о местоположении при продвижении, при каждой из которых вычисляют обновления для сведений об опорном местоположении в одном из последовательности малых интервалов времени. Последовательность 414 операций, выполняемых с низкой частотой, содержит последовательность операций 425 введения поправок в сведения о местоположении, при каждой из которых производят вычисление поправки к сведениям об опорном местоположение в одном из последовательности больших интервалов времени и поправок к результатам измерений.
Обновления для сведений о местоположении пользователя, вычисленные при некоторых или при всех операциях 413 обновления сведений о местоположении при продвижении, и обновления для сведений об опорном местоположении, вычисленные при некоторых или при всех операциях 423 обновления сведений о местоположении при продвижении, используют для вычисления обновления для вектора относительного положения, проходящего от опорного приемника 310, присоединенного к объекту 120A, до пользовательского приемника 210, присоединенного к объекту 110A, с использованием последовательности 433 операций вычисления относительного положения, показанных на Фиг.4Б. Операции 433 вычисления относительного положения могут быть выполнены в любом из приемников: в опорном приемнике или в пользовательском приемнике, или в обоих из них, или же они могут быть выполнены в отдельной системе обработки данных, что более подробно объяснено ниже.
Вследствие трудности при разрешении неопределенностей фазы несущей в опорной станции, при обычных кинематических вычислениях в реальном времени (RTK) используют "двойные разности" результатов измерений фазы несущей для устранения погрешностей, обусловленных часами спутника и приемника, и для помощи в определении целочисленных неопределенностей в результатах измерений фазы несущей в системе GPS. Так как двойные разности содержат результаты наблюдений по 4 различным трактам (от каждой из 2 точек наблюдения до каждого из 2 спутников), то этот подход требует того, чтобы перед формированием двойных разностей исходные результаты измерений фазы несущей в опорной точке были переданы пользователю, и чтобы пользователь находился в режиме ожидания до тех пор, пока не поступят данные из опорной точки. Настоящее изобретение отличается от обычных способов тем, что в нем использован новый способ генерации поправок для результатов измерения фазы несущей в опорной подсистеме 110, и тем, что в нем вместо передачи исходных результатов измерений из опорной подсистемы 110 в пользовательскую подсистему 120 по каналу 112 передачи данных передают поправки.
Вычисление поправок к результатам измерений фазы несущей в опорной подсистеме 120 приводит к уменьшению объема вычислений, которые пользовательская подсистема 110 должна выполнить, и обычно устраняет необходимость в наличии в пользовательской подсистеме 110 информации о том, где расположен опорный приемник 310. Кроме того, несмотря на то, что исходные результаты измерений отражают всю динамику спутников 101 (и приемника, формирующего результаты измерений), в поправках устранены сведения о динамике и, таким образом, происходит всего лишь их медленное изменение с течением времени. Это означает, что эффект задержки, внесенной из-за времени вычислений и временем передачи по каналу передачи данных, становится менее значительным. Вычисление поправок в опорной подсистеме 120 также обеспечивает возможность наличия более низкой скорости передачи данных из опорной подсистемы 120 в пользовательскую подсистему 110. Например, может быть легко использована скорость передачи данных с частотой один герц для поддержки вывода данных о местоположении пользователя с частотой десять герц.
На Фиг.6A проиллюстрирована последовательность 401 операций инициализации, выполняемая пользовательской подсистемой 110, согласно одному из вариантов осуществления настоящего изобретения. Как показано на Фиг.6A, последовательность 401 операций инициализации содержит операцию 602, при которой формируют результаты измерения кода, сглаженные по несущей. При выполнении операции 602 результаты измерения кода, полученные в пользовательском приемнике 210, сглаживают с использованием комбинации соответствующих результатов измерений фазы несущей на частотах L1 и L2. Множество приемников системы GPS производят измерения обоих кодов: кода гражданского доступа (C/A) и псевдокода (P), на частоте L1 или L2, и любые из результатов измерений кода гражданского доступа (C/A) или псевдокода (P) могут быть использованы в качестве результатов измерения кода на частоте L1 или L2. Однако, поскольку существуют малые смещения между результатами измерений двух различных кодов, то те из двух результатов измерений, которые используют в опорной подсистеме 310, также должны быть использованы и для эквивалентного процесса в пользовательской подсистеме 210. В приведенном ниже обсуждении для каждого спутника, видимого в пользовательском приемнике 210, и для каждого интервала времени измерения частоты L1 и L2 обозначены соответственно как f1 и f2, исходные результаты измерения кода псевдодальности на частотах L1 и L2 по желанию обозначены соответственно как P1 и P2, а исходные результаты измерения фазы несущей на частотах L1 и L2 обозначены соответственно как φ 1 и φ 2.
В одном из вариантов осуществления настоящего изобретения линейная комбинация результатов измерений фазы несущей на частотах L1 и L2 относительно каждого спутника 101 сформирована таким образом, что соответствует влиянию преломления в ионосфере на соответствующие результаты измерения кода на частотах L1 и L2. Комбинация фазы несущей, которая соответствует влиянию преломления в ионосфере на результат измерения кода P1 обозначена как M 1 и сформирована следующим образом:

Комбинация фазы несущей, которая соответствует влиянию преломления в ионосфере на результат измерения кода P2, обозначена как M 2 и сформирована следующим образом:

где L1 и L2 - результаты измерения фазы несущей, масштабированные на длины волн сигналов соответственно L1 и L2, и каждый из них содержит значение неопределенности на приблизительно целое число периодов, которое было добавлено для того, чтобы масштабированный результат измерения фазы несущей был близким к тому же самому значению, что и соответствующий результат измерения кода. Таким образом,
где значения N 1 и N 2 целых периодов были инициализированы в начале слежения за фазой несущей, в результате чего получают значения в пределах одной длины волны несущей относительно соответствующих результатов измерения кода для того, чтобы разности между масштабированными результатами измерений фазы несущей и соответствующими результатами измерения кода оставались малыми.
Используя комбинации M 1 и M 2 фазы несущей, могут быть сформированы сглаженные результаты измерения кода следующим образом:

где нижний индекс i использован для обозначения конкретного интервала времени измерения, нижний индекс j использован для обозначения результатов измерений на двух различных частотах, поэтому j=1 или 2, О обозначает сглаженное отклонение между результатом измерения кода и соответствующей комбинацией фазы несущей, а S обозначает сглаженный результат измерения кода. Значение (равно i до тех пор, пока не достигнуто максимальное значение усреднения. Например, если предполагают, что результат измерения фазы несущей имеет только 1/100 шума результата измерения кода, то значение "η" ограничено величиной "100 в квадрате", или 10000.
В альтернативном варианте сглаженные результаты измерения кода могут быть получены следующим образом:
где:

В этом альтернативном варианте способа сглаживания осуществляют упреждающее прогнозирование результата измерения кода с использованием изменения в комбинациях фазы несущей, а затем усредняют разность между этим прогнозом и результатом измерения кода.
Сглаженные результаты измерения кода на двух частотах могут быть объединены для формирования сглаженного результата измерения кода с поправкой на преломление (RC), имеющего следующий вид:

Иной способ получения результатов измерения кода, сглаженных по несущей, с поправкой на преломление (RC) может быть найден в заявке на патент США №10/630,302 "Method for Generating Clock Corrections for a Wide-Area or Global Differential GPS System", раскрытие сущности которой включено сюда путем ссылки и правами на которую владеют патентовладельцы настоящего изобретения.
Может потребоваться период инициализации, охватывающий несколько интервалов времени измерений перед тем, как в каждом последующем интервале времени измерений могут быть получены надежные результаты измерения кода, сглаженные по несущей, с поправкой на преломление (RC). После того как прошел период инициализации, последовательность 401 операций инициализации содержит еще одну операцию 604, при которой вычисляют поправку к оцененному местоположению пользователя. Хотя при выполнении операции 604 может быть использован любой из нескольких обычных способов спутниковой навигации, в одном из вариантов осуществления настоящего изобретения для вычисления поправки к данным о местоположении при операции 604 используют метод наименьших квадратов. В методе наименьших квадратов навигацию с использованием результатов измерений относительно спутников описывают как процесс, управляемый дискретно по времени, который определяется набором линейных стохастических разностных уравнений, каждое из которых соответствует одному из задействованных спутников 101. Для каждого из задействованных спутников это уравнение может быть выражено следующим образом:

где x - вектор поправки для состояния, отображающий поправку к состоянию процесса, управляемого дискретно по времени, который в этом случае может содержать поправки к местоположению пользователя и к показаниям часов, связанных с пользовательским приемником 210; z - представляет собой значение результата измерения, являющееся новшеством, которое определяется разностью между результатом измерения, произведенного пользовательским приемником 210 относительно спутника, и ожидаемым результатом измерения, который вычислен, исходя из первоначально оцененного состояния; n представляет собой шум в результатах измерений, а h представляет собой вектор чувствительности измерения, который характеризует чувствительность измерения к изменению состояния.
Новшеством в измерениях является сглаженный результат измерения кода несущей относительно спутника на любой из частот L1 или L2, вычисляемый при операции 602, или же им может являться результат измерения кода, сглаженный по несущей, с поправкой на преломление (RC). Как объяснено в приведенном ниже более подробном описании, какой бы из результатов измерений ни использовался в новшестве, они должны быть скорректированы с использованием поправок, вычисленных в последовательности 402 операций инициализации, выполняемой в опорной подсистеме 120, и переданы в пользовательскую подсистему 110. Вектор h сформирован путем разложения уравнения, устанавливающего соотношение между результатами измерений псевдодальности и местоположением приемника системы GPS, в ряд Тейлора. Компоненты вектора h содержат первые производные результатов измерения, являющихся новшеством, относительно вектора поправки. Вектор x поправки для состояния содержит, по меньшей мере, поправку к данным об опорном местоположении. Он также может содержать поправку к показаниям часов пользовательского приемника. Для упрощения последующего описания сделано предположение, что вектор состояния представляет собой вектор с четырьмя компонентами, то есть, состояние содержит только лишь поправки к данным о местоположении пользовательского приемника и к показаниям часов приемника.
Уравнение (9) может быть разложено таким образом, что устанавливает соотношение между вектором поправки для состояния и набором результатов измерений относительно множества спутников в общем интервале времени измерения:

В этом уравнении z представляет собой вектор, состоящий из новшеств относительно множества спутников, H представляет собой матрицу, состоящую из значений чувствительности измерений относительно множества спутников, x по-прежнему представляет собой вектор состояния, а n представляет собой вектор шумов при измерениях, содержащий набор значений шумов при измерениях, связанных с новшествами в z. Матрица H чувствительности измерений зависит от геометрической конфигурации спутников 101, которая имеет отношение ко всем геометрическим взаимосвязям между пользовательским приемником 210 и спутниками 101. Результаты измерения в векторе z, являющиеся новшествами, часто именуют разностями префиксов. Решение уравнения (10) методом наименьших квадратов имеет следующий вид:
где верхний индекс T отображает операцию транспонирования, а верхний индекс "-1" отображает операцию обращения матрицы.
Альтернативой решению уравнения (10) с использованием уравнения (11) является вычисление его решения методом наименьших квадратов с весовыми коэффициентами, которое определяется следующим образом:

где W - ковариационная матрица результатов измерений, диагональные элементы которой представляют собой среднеквадратичные отклонения шумов измерения в векторе n шумов, а ее недиагональные элементы представляют собой ковариацию между результатами измерений. Поскольку обычно предполагают, что ковариация между результатами измерений равна нулю, то недиагональные элементы матрицы W обычно равны нулю.
Для простоты описания в приведенных ниже обсуждениях использовано простое уравнение наименьших квадратов, а именно уравнение (3). Уравнение (3) может быть еще более упрощено, в результате чего получают:

или

где  и
и 
Также иногда полезно сформировать разностную матрицу S чувствительности, которая устанавливает соответствие между новшествами z, или разностями префиксов, и разностями постфиксов, соответствующими результатам измерений в новшествах z. Разности постфиксов отображены как компоненты вектора (невязки:

где

где I - квадратная единичная матрица с рангом, равным количеству измерений, или количеству элементов в z.
Кроме того, последовательность 401 операций инициализации содержит операцию 606, при которой к данным о местоположение пользователя в векторе x поправки добавляют поправку к первоначально оцененному местоположению пользователя, получая скорректированную оценку местоположения пользовательского приемника. Введение поправок в показания часов пользовательского приемника часто расценивают как мешающий параметр, и их не обновляют. Это возможно потому, что зависимость от показаний часов приемника является линейной, и большие погрешности в этом значении не оказывают воздействие на решение по определению местоположения. Так как уравнения дальности, а именно уравнения (9) - (15), являются нелинейными, то может потребоваться итерационное выполнение операций 604 и 606 в том случае, если оценка исходного местоположения имеет большую погрешность. Операции 604 и 606 в последовательности 401 операций инициализации могут быть выполнены итерационным способом с использованием того же самого набора результатов измерений, полученных в интервале времени измерения. Или же итерация может содержать часть операции 602 в дополнение к операциям 604 и 606 для охвата множества интервалов времени измерения. Таким образом, в последовательности 401 операций инициализации может потребоваться несколько больших интервалов времени до того, как будет произведена хорошая оценка местоположения пользователя и будут получены соответствующие матрицы A и H (или В и S).
Последовательность 401 операций инициализации дополнительно содержит выполняемую после этого операцию 608, при которой путем кинематических измерений в реальном времени (RTK) может быть определено местоположение вблизи от этой хорошей оценки местоположения пользователя путем нахождения решения относительно целочисленных неопределенностей в результатах измерений фазы несущей, что выполняют в первую очередь. Для этого может быть использован обычный способ поиска неопределенности. В альтернативном варианте может быть использован способ поиска неопределенности, описанный в заявке на патент США "Fast Ambiguity Resolution for Real-Time Kinematic Survey and Navigation", раскрытие сущности которой включено сюда путем ссылки, и правами на которую владеют патентовладельцы настоящего изобретения. Полученные решения для неопределенностей на целое число периодов используют для корректировки результатов измерений фазы несущей и скорректированные результаты измерений фазы несущей снова используют для вычисления местоположения пользовательского приемника с использованием уравнений (9)-(15) для получения данных о начальном местоположении пользователя, используемых в последующей обработке.
Как показано на Фиг.6A, последовательность 402 операций инициализации, выполняемая опорной подсистемой 120, является подобной последовательности 401 операций инициализации, за исключением того, что операцию 608 не выполняют.Кроме того, поправки из стационарной опорной станции 130 или из концентратора 140 могут быть использованы для внесения поправок в результаты измерений, используемые для формирования вектора z новшеств. Кроме того, содержится дополнительная операция 609 для вычисления поправок к результатам измерений для их передачи в пользовательскую подсистему 110 по каналу 112 передачи данных. Для вычисления поправок для результатов измерений при операции 609 используют скорректированные данные о местоположении пользователя для вычисления теоретической дальности до каждого из спутников 101, используемой при вычислениях. Эту теоретическую дальность вычитают из результатов измерений, получая исходные поправки к результатам измерений, то есть,
где верхний индекс i обозначает конкретный спутник 101, m i обозначает результат измерения конкретного типа, например сглаженный результат измерения кода или фазы несущей, относительно спутника, ρi обозначает вычисленную теоретическую дальность относительно спутника, а εi обозначает исходную поправку к результату измерений.
Исходные поправки имеют систематическую погрешность, обусловленную общей погрешностью часов приемника, которая может быть оценена путем усреднения исходных поправок для конкретного типа результатов измерений по всем задействованным спутникам 101. Затем получают поправку к результату измерений без систематической погрешности путем устранения этой общей систематической погрешности из исходной поправки:
Генерацию набора этих поправок осуществляют для каждого типа измерений, то есть для измерений кода на частоте L1 со сглаживанием, для измерений кода на частоте L2 со сглаживанием, для измерений фазы несущей на частоте L1 и фазы несущей на частоте L2, для каждого задействованного спутника 101. Этот способ вычисления поправок обеспечивает автоматическое отражение любых глобальных поправок, широкозонных поправок или поправок кинематических измерений в реальном времени (RTK), которые были использованы при вычислении подвижного опорного местоположения приемников, в поправках, сгенерированных для передачи в пользовательский приемник. Если движение подвижного опорного местоположения является равномерным, то есть если отсутствуют внезапные перескоки в местоположении, то поправки будут гладкими и будет происходить всего лишь медленное изменение их значения с течением времени.
После того как в последовательности 401 операций инициализации вычислено начальное местоположение пользователя и вычислены соответствующие матрицы A и H (или В и S), начинают последовательность 412 операций, выполняемую с высокой частотой, и последовательность 414 операций, выполняемую с низкой частотой. Аналогичным образом, после того как в последовательности 402 операций инициализации вычислено начальное опорное местоположение и вычислены соответствующие матрицы A и H (или В и S), начинают последовательность 422 операций, выполняемую с высокой частотой, и последовательность 424 операций, выполняемую с низкой частотой. В одном из вариантов осуществления настоящего изобретения, выполнением последовательностей 412 и 414 операций (или последовательностей 422 и 424 операций) управляет операционная система 268 реального времени, ОСРВ (RTX) (или ОСРВ 368), которая после последовательности 401 (или 402) операций инициализации начинает выполнение двух отдельных потоков, запуская выполнение соответственно последовательностей 412 и 414 операций (или последовательностей 422 и 424 операций). Более высокий приоритет может быть предоставлен тому потоку задач, в котором выполняется последовательность 412 (или 422) операций с высокой частотой, а более низкий приоритет может быть предоставлен тому потоку задач, в котором выполняется последовательность 414 (или 424) операций с низкой частотой. Как более подробно объяснено ниже, операционная система реального времени (RTX) также осуществляет управление формированием очередей данных для каждого потока и передачей данных между потоками.
В последовательности 414 (или 424) операций, выполняемой с низкой частотой, вычисляют поправку к данным о соответствующем местоположении приемника и соответствующие матрицы A и H (или В и S) в каждом большом интервале времени с использованием последовательности 415 (или 425) операций введения поправок в сведения о местоположении. На Фиг.6Б проиллюстрирована последовательность 415 операций введения поправок в сведения о местоположении, выполняемая пользовательской подсистемой 110, и последовательность 425 операций введения поправок в сведения о местоположении, выполняемая опорной подсистемой 120, согласно одному из вариантов осуществления настоящего изобретения. Как показано на Фиг.6Б, последовательность 425 операций введения поправок в сведения о местоположении выполняемая опорной подсистемой 120, содержит операцию 610, при которой формируют результаты измерения кода, сглаженные по несущей, путем обновления результатов измерения кода, сглаженных по несущей, полученных из последовательности (402) операций инициализации или из предыдущей последовательности 425 операций введения поправок в сведения о местоположении. Исходные результаты измерений, используемые для вычисления результатов измерения кода, сглаженных по несущей, могут содержать поправки, принятые опорным приемником 310 из стационарной опорной станции 130 или из концентратора 140. Как описано выше, результаты измерения кода, сглаженные по несущей, на частотах L1 и L2 относительно каждого спутника могут быть использованы для формирования комбинации результатов измерения кода, сглаженного по несущей, с поправкой на преломление (RC)
Кроме того, последовательность 425 операций введения поправок в сведения о местоположении, выполняемая опорной подсистемой 120, содержит еще одну операцию 620, при которой вычисляют поправку к обновленным сведениям об опорном местоположении, недавно вычисленным в последовательности 422 операций, выполняемой с высокой частотой. Для получения поправок к сведениям об опорном местоположении и соответствующих матриц A и H (или В и S) при операции 620 может быть использована последовательность операций, подобная последовательности операций, использованной при операции 604, которая содержит последовательность операций вычисления поправок к сведениям о местоположении, описанную выше применительно к уравнениям (9) - (15). Вычисленную поправку к опорному местоположению ставят в очередь для ее использования в последовательности 422 операций, выполняемой с высокой частотой, которую также выполняет опорная подсистема 120, а ее более подробное объяснение приведено ниже.
Кроме того, последовательность 425 операций введения поправок в сведения о местоположении, выполняемая опорной подсистемой 120, содержит еще одну операцию 630, при которой вычисляют поправки к результатам измерений. Для вычисления поправок вычисленную поправку к сведениям об опорном местоположении добавляют к обновленным сведениям об опорном местоположении, полученным из последовательности операций, выполняемой с высокой частотой, для получения скорректированной оценки опорного местоположения, которую затем используют для вычисления теоретической дальности до каждого из спутников 101, задействованного в вычислениях. Затем вычисляют поправки к результату измерений согласно уравнениям (16) и (17) так, как описано выше. Как показано на Фиг.6Б, вычисленные поправки передают в пользовательскую подсистему 110 по каналу 112 передачи данных.
Для обеспечения только лишь медленного изменения поправок, вычисленных в последовательности 420 операций, выполняемой с низкой частотой, чтобы не создавать в пользовательской подсистеме 110 какие-либо проблемы из-за задержек, желателен очень гладкий вывод данных об опорном местоположении. Как изложено выше, использование сглаженных результатов измерения кода для вычисления поправок к сведениям об опорном местоположении помогает обеспечить то, что обновления сведений об опорном местоположении являются гладкими. Кроме того, необходимо проявлять осторожность в том, чтобы отбрасывание или добавление результатов измерений от одного или большего количества спутников не вызывало ступенчатого изменения в сведениях о местоположении. Для решения проблемы, связанной с отбрасыванием или добавлением результатов измерений, может быть использовано несколько различных способов, обеспечивающих вывод гладких данных об опорном местоположении. Один способ состоит в использовании в последовательности 424 операций, выполняемой с низкой частотой, фильтра Кальмана (Kalman), который присваивает результатам измерений фазы несущей значительно более высокие весовые коэффициенты, чем результатам измерения кода. Другой способ состоит во введении состояния отклонения результатов измерений, которые приводят разности к нулю при использовании метода наименьших квадратов в последовательности 424 операций, выполняемой с низкой частотой. Этим состояниям отклонения не позволяют изменяться очень быстро. При введении в решение результатов измерений от нового спутника состояния его отклонения установлены таким образом, что результаты измерений согласуются со сведениями о местоположении, полученными от других спутников. Когда происходит потеря результатов измерений от одного или большего количества спутников, то разрешена только лишь медленная корректировка состояний отклонения.
Использование глобальных или широкозонных дифференциальных поправок для системы GPS, обеспечиваемых глобальными и крупномасштабными территориальными сетями StarFire, которые предоставляет фирма "John Deere and Company" (США), для внесения поправок в результаты измерений, используемые для вычисления поправок в последовательности 424 операций, выполняемой с низкой частотой, приводит к более высокой точности решения для опорного местоположения и помогает обеспечить гладкость решения для местоположения. Даже имеется возможность использования решения для опорного местоположения, основанного на кинематических измерениях в реальном времени (RTK), которое зависит от поправок из некоторой иной (предположительно, неподвижной) опорной точки 130. Этот вариант реализации может быть использован, например, в качестве способа для продолжения линии визирования в окружающей среде с наличием преград или холмов. Опорный приемник 310 может представлять собой портативный приемник или приемник, установленный на транспортном средстве, который располагают надлежащим образом, обеспечивающим размещение пользовательского приемника 210 на его линии визирования таким образом, что он остается на линии визирования неподвижного опорного приемника 130.
Система расширенного района приема дифференциальных поправок (Wide Area Augmentation System), разработанная правительством США, предоставляет поправки, которые могут вносить в решение о местоположении ступенчатые изменения на 10 сантиметров или более. Таким образом, если не используется какой-либо способ сглаживания этих ступенчатых изменений, то они могут оказывать неблагоприятное воздействие на относительную навигацию или на эффекты, обусловленные задержками, в пользовательском приемнике.
Как показано на Фиг.6Б, последовательность 415 операций введения поправок в сведения о местоположении, выполняемая пользовательской подсистемой, содержит операцию 640, при которой формируют результаты измерения кода, сглаженные по несущей, путем обновления результатов измерения кода, сглаженных по несущей, полученных из последовательности 401 операций инициализации или из предыдущей последовательности 415 операций введения поправок в сведения о местоположении. Как описано выше, результаты измерения кода, сглаженные по несущей, на частотах L1 и L2 относительно каждого спутника могут быть использованы для формирования комбинации результатов измерения кода, сглаженных по несущей, с поправкой на преломление (RC)
Кроме того, последовательность, 415 операций введения поправок в сведения о местоположении, выполняемая пользовательской подсистемой 110, содержит операцию 650, при которой используют самые последние по времени поправки к результатам измерений системы GPS, принятые из опорной подсистемы 120 по каналу 112 передачи данных, для введения поправок в соответствующие результаты измерений системы GPS, в том числе, в результаты измерения фазы несущей и в результаты измерения кода, сглаженные по несущей, которые вычислены при выполнении операции 640, для получения соответствующих уточненных результатов измерений. Поскольку изменение поправок с течением времени происходит медленно, то использование поправок, которые являются устаревшими на одну или на большее количество секунд, является приемлемым для последовательности 415 операций введения поправок в сведения о местоположении, выполняемой в пользовательской подсистеме 110. Проверка показала, что это увеличивает шум в данных о местоположении на пренебрежимо малую величину. Таким образом, пользовательская подсистема 110 необязательно должна ждать получения синхронных поправок из опорной подсистемы 120, которая осуществляет их генерацию, чтобы начать обработку своих собственных результатов измерений, произведенных системой GPS, при этом подразумевают, что последовательность 410 операций обновления сведений о местоположении в пользовательской подсистеме 110 испытывает меньшие задержки вследствие задержек при вычислении поправок в опорной подсистеме 120 или при передаче поправок из опорной подсистемы 120 в пользовательскую подсистему 110 с использованием канала 112 передачи данных.
Если опорная подсистема 120 использует какой-либо вид навигации, в котором для опорного местоположения допускаются некоторые внезапные скачки в сведениях о местоположении, то возникает нестандартная процедура обработки. Например, при использовании системы расширенного района приема дифференциальных поправок (WAAS) для навигации объекта 120A с использованием заданных алгоритмов обычно имеют место десятисантиметровые скачки в сведениях о местоположении. Для того чтобы избежать скачков подобной величины в сведениях о местоположении в относительной разности векторов, требуется задержка вычисления наименьших квадратов в пользовательской подсистеме 110 до тех пор, пока в пользовательской подсистеме 110 не будут приняты поправки из того же самого интервала времени. Это вызывает увеличенную задержку при выводе обновлений для сведений о местоположении пользовательского приемника.
Кроме того, последовательность 415 операций введения поправок в сведения о местоположении, выполняемая пользовательской подсистемой 110, содержит еще одну операцию 660, при которой вычисляют поправку к обновленным сведениям о местоположении пользователя, которые были недавно вычислены и поставлены в очередь в последовательности 412 операций, выполняемой с высокой частотой. Для получения поправок к сведениям о местоположении пользователя и соответствующих матриц A и H (или В и S) при операции 660 может быть использована последовательность операций, подобная той, которая была использована при описанной выше операции 604. Вычисленную поправку к местоположению пользователя ставят в очередь для ее использования в последовательности 412 операций, выполняемой с высокой частотой, которую также выполняет пользовательская подсистема 110, а ее более подробное объяснение приведено ниже.
В последовательности 412 операций, выполняемой с высокой частотой, после последовательности операций инициализации сведения о местоположении пользователя продвигают вперед по времени путем вычисления обновленных сведений о местоположении пользователя в каждом из малых интервалов времени или в их последовательности с использованием операции 213 обновления сведений о местоположении при продвижении. Поскольку точность результатов измерений фазы несущей обычно составляет менее одного сантиметра, то они могут быть использованы для продвижения сведений о местоположении приемника вперед по времени с очень небольшим возрастанием погрешности. Как показано на Фиг.7, операция 213 обновления сведений о местоположении при продвижении в конкретном малом интервале времени из последовательности 212 операций, выполняемой с высокой частотой, содержит операцию 720, при которой вычисляют изменения результатов измерений фазы несущей между двумя последовательными малыми интервалами времени. Изменения могут быть вычислены с использованием результатов измерений фазы на несущей L1, то есть для каждого задействованного спутника 101, следующим образом:
где ΔL представляет собой изменение результата измерения фазы несущей относительно конкретного спутника,  и
и  представляют собой результаты измерений фазы несущей L1 относительно спутника соответственно в конкретном малом интервале времени m и в малом интервале времени m-1, находящимся непосредственно перед малым интервалом времени m. В альтернативном варианте изменение ΔL может быть вычислено с использованием среднего значения соответствующих результатов измерений фазы несущей L1 и L2:
представляют собой результаты измерений фазы несущей L1 относительно спутника соответственно в конкретном малом интервале времени m и в малом интервале времени m-1, находящимся непосредственно перед малым интервалом времени m. В альтернативном варианте изменение ΔL может быть вычислено с использованием среднего значения соответствующих результатов измерений фазы несущей L1 и L2:
где  и
и  представляют собой среднее значение результатов измерений фазы несущей L1 и L2 относительно спутника соответственно в малом интервале времени m и в малом интервале времени m-1.
представляют собой среднее значение результатов измерений фазы несущей L1 и L2 относительно спутника соответственно в малом интервале времени m и в малом интервале времени m-1.
Если необходимо учитывать преломление в ионосфере, то для вычисления изменений ΔL могут быть использованы результаты измерений фазы несущей с поправкой на преломление (RC), то есть для каждого спутника
где  и
и  представляют собой результаты измерений фазы несущей относительно спутника с поправкой на преломление соответственно в малом интервале времени m и в малом интервале времени m-1. Величина или может быть получена путем вычисления линейной комбинации соответствующих результатов измерений фазы несущей на частотах L1 и L2:
представляют собой результаты измерений фазы несущей относительно спутника с поправкой на преломление соответственно в малом интервале времени m и в малом интервале времени m-1. Величина или может быть получена путем вычисления линейной комбинации соответствующих результатов измерений фазы несущей на частотах L1 и L2:

В большинстве случаев, эта последовательность операций введения поправок на преломление в ионосфере согласно сравнению (19) имеет тенденцию усиливать шум в результатах измерений и, следовательно, является нежелательной для использования при операциях 213 или 223 обновления сведений о местоположении при продвижении, выполняемых с высокой частотой. Кроме того, игнорирование изменений эффектов преломления в ионосфере в течение промежутка времени между двумя последовательными малыми интервалами времени должно привести всего лишь к введению погрешности, являющейся меньшей, чем шумы в результатах измерений фазы несущей. Следовательно, в предпочтительном варианте при вычислении изменений ΔL используют результаты измерений фазы несущей L1 или усредненное значение результатов измерений фазы несущей L1 и L2, поскольку они имеют меньшие шумы, чем результаты измерений фазы несущей с поправкой на преломление (RC).
Кроме того, операция 213 обновления сведений о местоположении при продвижении содержит еще одну операцию 730, при которой используют значение ΔL, вычисленное при операции 720, для вычисления изменения местоположения пользовательского приемника между двумя соседними малыми интервалами времени m и m-1. Для вычисления изменения местоположения пользователя с использованием изменений в результатах измерений фазы несущей используют уравнение (13a) с теми матрицами A и H, которые были самыми последними поставлены в очередь в последовательности 414 операций, выполняемой с низкой частотой. Если конкретным малым интервалом времени является один из первых нескольких малых интервалов времени после последовательности 401 операций инициализации, то используют матрицы A и H, вычисленные в последовательности операций инициализации. Более эффективным вариантом является возможность использования матрицы В и уравнения (13b). Однако, если используется матрица В, то также необходимо использовать матрицу S и уравнение (14), для обеспечения альтернативного способа реакции на срыв слежения за периодом или на потерю сигнала при обработке, выполняемой с высокой частотой, как описано в заявке на патент №60877-0050 в досье патентного поверенного, имеющей название "GPS navigation using successive differences of Carrier-phase measurements", раскрытие сущности которой включено сюда путем ссылки, и правами на которую владеют патентовладельцы настоящего изобретения. Матрица S обычно является очень нечувствительной к местоположению пользователя. Таким образом, ее повторное вычисление необходимо производить только в том случае, если пользовательский приемник 210 совершил перемещение на значительное расстояние с тех пор, как была выполнена последняя последовательность 413 операций введения поправок в сведения о местоположении.
Вне зависимости от того, какие матрицы A и H или В и S используют, поскольку их вычисление в последовательностях 415 операций введения поправок в сведения о местоположении производят один раз в каждом большом интервале времени, они могут быть многократно использованы для вычисления обновлений для сведений о местоположении, выполняемых с высокой частотой, в последовательности малых интервалов времени с достаточной точностью, и поэтому отсутствует необходимость в их повторном вычислении в каждом малом интервале времени. Это значительно облегчает вычислительную нагрузку в последовательности 413 операций, выполняемой с высокой частотой, в которой в каждом малом интервале времени необходимо производить повторное вычисление только лишь конкретных значений для реализации уравнения (13a) или уравнения (13b) и (14), которыми являются компоненты вектора z новшеств, которые представляют собой просто изменения в результатах измерений фазы несущей относительно задействованных спутников 101, вычисленные с использованием уравнения (18a), (18b) или (18c).
Кроме того, операция 213 обновления сведений о местоположении при продвижении содержит еще одну операцию 740, при которой используют изменения фазы несущей или разности ΔL с поправкой на преломление (RC) для вычисления изменения положения пользовательского приемника 110 с использованием уравнения (13a) или уравнений (13b) и (14). Изменение положения содержит изменение  местоположения
местоположения  пользовательского приемника, вычисленного в малом интервале времени m-1. Таким образом, обновление для сведений о местоположении
пользовательского приемника, вычисленного в малом интервале времени m-1. Таким образом, обновление для сведений о местоположении  пользовательского приемника в малом интервале времени m может быть получено следующим образом:
пользовательского приемника в малом интервале времени m может быть получено следующим образом:
где представляет собой поправку к сведениям о местоположении  приемника, которая выражена в декартовых координатах xyz и в геоцентрической системе координат, неподвижной относительно Земли. Если поправка представлена в системе координат "север-восток-вверх", то изменение местоположения сначала должно быть умножено на надлежащую матрицу R вращения, которая также должна быть вычислена в последовательности 414 операций, выполняемой с низкой частотой, и поставлено в очередь для использования в последовательности 412 операций, выполняемой с высокой частотой, вместе с матрицами A и H (или В и S). В этом случае
приемника, которая выражена в декартовых координатах xyz и в геоцентрической системе координат, неподвижной относительно Земли. Если поправка представлена в системе координат "север-восток-вверх", то изменение местоположения сначала должно быть умножено на надлежащую матрицу R вращения, которая также должна быть вычислена в последовательности 414 операций, выполняемой с низкой частотой, и поставлено в очередь для использования в последовательности 412 операций, выполняемой с высокой частотой, вместе с матрицами A и H (или В и S). В этом случае
где представляет собой изменение местоположения в координатах "север-восток-вверх", а  и
и  представляют собой обновления сведений о местоположении приемника в декартовых координатах.
представляют собой обновления сведений о местоположении приемника в декартовых координатах.
Один раз в каждом большом интервале времени производят внесение дополнительных поправок в сведения о местоположении приемника путем добавления поправки  для местоположения в сведения об изменении местоположения или в сведения о местоположении после продвижения. В последовательности 414 операций, выполняемой с низкой частотой, вычисляют дополнительную поправку и ставят ее в очередь для использования в последовательности 412 операций, выполняемой с высокой частотой, как описано выше. Периодическое добавление помогает предотвратить накопление любых неточностей в обновлениях , производимых с высокой частотой. Добавление может быть произведено либо до, либо после вычисления в ответ на последнюю на данный момент времени организацию очереди результатов вычислений в последовательности 414 операций, выполняемой с низкой частотой. Также последовательность операций 213 обновления сведений о местоположении при продвижении дополнительно содержит еще одну операцию 760, выполняемую один раз за каждый большой интервал времени, при которой обновление сведений о местоположении пользователя ставят в очередь для использования в последовательности 414 операций, выполняемой с высокой частотой, которая описана выше.
для местоположения в сведения об изменении местоположения или в сведения о местоположении после продвижения. В последовательности 414 операций, выполняемой с низкой частотой, вычисляют дополнительную поправку и ставят ее в очередь для использования в последовательности 412 операций, выполняемой с высокой частотой, как описано выше. Периодическое добавление помогает предотвратить накопление любых неточностей в обновлениях , производимых с высокой частотой. Добавление может быть произведено либо до, либо после вычисления в ответ на последнюю на данный момент времени организацию очереди результатов вычислений в последовательности 414 операций, выполняемой с низкой частотой. Также последовательность операций 213 обновления сведений о местоположении при продвижении дополнительно содержит еще одну операцию 760, выполняемую один раз за каждый большой интервал времени, при которой обновление сведений о местоположении пользователя ставят в очередь для использования в последовательности 414 операций, выполняемой с высокой частотой, которая описана выше.
Последовательность операций 213 обновления сведений о местоположении при продвижении содержит еще одну операцию 770, при которой обновление сведений о местоположении пользователя выводят в отдельную систему обработки данных или в опорную подсистему 120 для вычисления относительного положения пользователя, выполняемого при операции 433. В альтернативном варианте или в дополнение к этому, относительное положение пользователя может быть вычислено при выполнении операции 770 в пользовательской подсистеме 110, ожидающей получения обновления сведений об опорном местоположении для того же самого малого интервала времени m, предполагая, что часы в пользовательской подсистеме 110 и в опорной подсистеме являются синхронизированными. Вне зависимости от того, где производят его вычисление, относительное положение  может быть вычислено следующим образом:
может быть вычислено следующим образом:
Как описано выше, обновление сведений об опорном местоположении вычисляют в процессе 423 обновления сведений о местоположении при продвижении для того же самого малого интервала времени m в последовательности 422 операций, выполняемой с высокой частотой, и передают в пользовательскую подсистему 110 или в отдельную систему обработки данных для вычисления относительного положения пользователя. Выполнение процесса 423 обновления сведений о местоположении при продвижении в опорной подсистеме 120 является аналогичным выполнению процесса 413 обновления сведений о местоположении при продвижении в пользовательской подсистеме 110, описание которой приведено, за исключением того, что та ее часть, которая относится к пользовательскому приемнику 210, заменена соответствующей частью, относящейся к опорному приемнику 310.
Как изложено выше, обновления сведений о местоположении пользователя, генерация которых осуществлена в последовательности 412 операций, выполняемой с высокой частотой, и обновления сведений об опорном местоположении, генерация которых осуществлена в последовательности 422 операций, выполняемой с низкой частотой, используют для вычисления вектора относительного положения с использованием последовательности операций 433, показанной на Фиг.4Б. Операции 433 могут быть выполнены в пользовательской подсистеме 110 либо как часть последовательности 412 операций, выполняемой с высокой частотой, либо в отдельном потоке после выполнения последовательности 401 операций инициализации в том случае, если обновления сведений об опорном местоположении, которые необходимы для вычислений, могут быть своевременно переданы в пользовательскую подсистему 110. Если вычисление вектора относительного положения произведено в последовательности 412 операций, выполняемой с высокой частотой, то обновление сведений об опорном местоположении для конкретного малого интервала времени необходимо передать в пользовательскую подсистему 110 в пределах этого малого интервала времени. Путем использования отдельного потока для операций 433, при операции 433 для конкретного малого интервала времени может производиться ожидание поступления обновления сведений об опорном местоположении в течение малого интервала времени перед вычислением вектора относительного положения для этого малого интервала времени. Таким образом, отсутствует необходимость в передаче обновления сведений об опорном местоположении для малого интервала времени в пользовательскую подсистему 110 в пределах этого малого интервала времени, но результат последовательности операций 433 для малого интервала времени, может быть недоступен до момента времени после нескольких малых интервалов времени. Аналогичным образом, операции 433 могут также быть выполнены в опорной подсистеме 120 либо как часть последовательности 422 операций, выполняемой с высокой частотой, либо в отдельном потоке задач после выполнения последовательности 402 операций инициализации в том случае, если обновления сведений о местоположении пользователя, которые необходимы для вычислений, могут быть своевременно переданы в опорную подсистему 120. Операции 433 могут быть также выполнены в отдельной системе обработки данных. Единственным необходимым условием для вычисления вектора относительного положения является доступность сведений о местоположении обоих приемников: пользовательского приемника и опорного приемника.
Изобретение относится к спутниковым технологиям определения местоположения, в частности к способу кинематического определения местоположения в реальном времени со стационарным или подвижным опорным приемником. Техническим результатом является повышение точности определения местоположения объекта. Технический результат достигается тем, что определяют местоположение опорной станции в опорной станции согласно сигналам, принятым в ней от множества спутников, определяют местоположение пользовательского приемника в том месте, где находится пользователь, на основании полученных в нем результатов измерений и на основании значений поправок, вычисленных в опорной станции, для коррекции погрешностей, и вычисляют вектор относительного положения путем вычисления разности между местоположением опорной станции и местоположением пользователя. 6 н. и 13 з.п. ф-лы, 7 ил.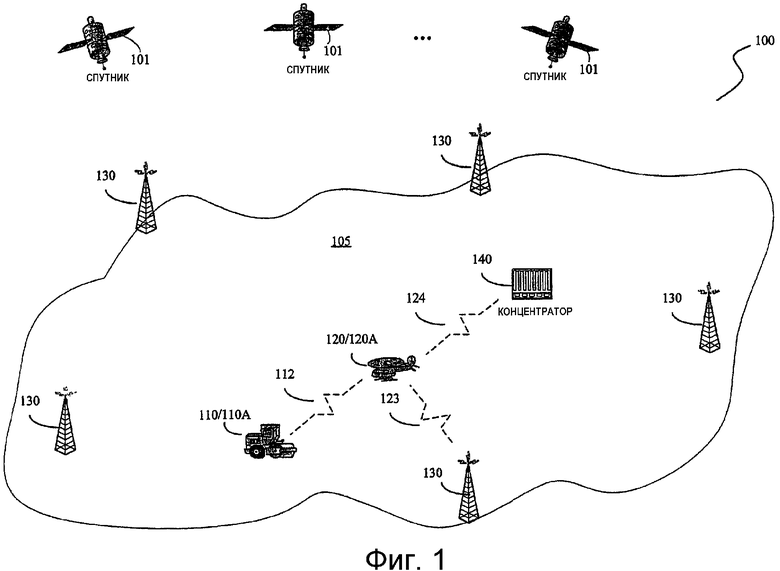
1. Способ навигации для первого объекта относительно второго объекта, содержащий следующие операции:
получают набор результатов измерений фазы несущей согласно сигналам, принятым в первом объекте от множества спутников;
вводят поправки в набор результатов измерений фазы несущей с использованием поправок, вычисленных для второго объекта согласно сигналам, принятым во втором объекте от множества спутников; при этом вторым объектом является подвижный объект;
определяют поправку к сведениям о местоположении для первого объекта с использованием набора результатов измерений фазы несущей с введенными поправками;
принимают сведения о вычисленном местоположении второго объекта; и
вычисляют разность векторов между вычисленным местоположением первого объекта и вычисленным местоположением второго объекта.
2. Способ по п.1, содержащий следующую дополнительную операцию: в вычисленные сведения о местоположении первого объекта добавляют поправку к сведениям о местоположении для получения уточненных сведений о местоположении первого объекта.
3. Способ по п.2, содержащий следующую дополнительную операцию: вычисляют обновления для сведений о местоположении первого объекта с использованием последовательных изменений результатов измерений фазы несущей, полученных в первом объекте от множества спутников.
4. Способ по п.3, в котором изменения результатов измерений фазы несущей являются скорректированными с поправкой на преломление.
5. Способ по п.1, в котором операция определения поправки к сведениям о местоположении содержит следующую операцию: разрешают целочисленные неопределенности в результатах измерений фазы несущей.
6. Предназначенный для подвижной опорной станции способ предоставления поправок к результатам измерений, по меньшей мере, в один объект, для которого обеспечивают навигацию, содержащий следующие операции:
получают результаты измерений кода и фазы несущей в подвижной опорной станции согласно сигналам из множества спутников;
формируют результаты измерений кода, сглаженные по несущей, которые соответствуют результатам измерений кода и фазы несущей;
определяют местоположение подвижной опорной станции с использованием результатов измерений кода, сглаженных по несущей;
вычисляют теоретическую дальность между подвижной опорной станцией и каждым из множества спутников с использованием сведений о местоположении опорной станции;
вычисляют поправки к результатам измерений с использованием теоретической дальности; и
передают местоположение опорной станции и поправки к результатам измерений, по меньшей мере, в один объект, для которого обеспечивают навигацию, чтобы позволить вычисление разности векторов между вычисленным местоположением, по меньшей мере, одного объекта, для которого обеспечивают навигацию, и местоположением опорной станции.
7. Способ по п.6, в котором результаты измерений кода и фазы несущей содержат поправки к результатам измерений, предоставленные широкозонной или глобальной навигационной системой.
8. Способ по п.6, в котором результаты измерения кода, сглаженные по несущей, содержат поправки к результатам измерений, предоставленные широкозонной или глобальной навигационной системой.
9. Способ определения местоположения пользователя системы спутниковой навигации относительно местоположения подвижной опорной станции в системе спутниковой навигации, содержащей подвижную опорную станцию, который содержит следующие операции:
определяют местоположение подвижной опорной станции согласно сигналам, принятым в подвижной опорной станции из множества спутников;
определяют местоположение пользователя на основании результатов измерений, полученных пользователем согласно сигналам, принятым пользователем от множества спутников, и поправок к результатам измерений, определяемых в соответствии с сигналами, принятыми в подвижной опорной станции от множества спутников; и
вычисляют разность векторов между местоположением пользователя и местоположением подвижной опорной станции.
10. Способ по п.9, в котором разность векторов вычисляют в пользовательском устройстве.
11. Способ по п.9, в котором разность векторов вычисляют в подвижной опорной станции.
12. Способ по п.9, в котором разность векторов вычисляют в отдельной системе обработки данных, которая получает сведения о местоположении пользователя от пользователя и сведения о местоположении подвижной опорной станции из подвижной опорной станции.
13. Способ по п.9, в котором операция определения местоположения опорной станции содержит следующую операцию: определяют изменение местоположения опорной станции на основании изменений в результатах измерений фазы несущей, полученных в опорной станции согласно сигналам из множества спутников.
14. Способ по п.9, в котором операция определения местоположения пользователя содержит следующую операцию: определяют изменение местоположения пользователя на основании изменений в результатах измерений фазы несущей, полученных в пользовательском устройстве согласно сигналам из множества спутников.
15. Система спутниковой навигации, содержащая:
подвижную опорную подсистему, выполненную таким образом, что она:
получает первые результаты измерений дальности до спутников согласно сигналам, принятым подвижной опорной подсистемой из множества спутников;
определяет опорное местоположение, соответствующее подвижной опорной подсистеме, согласно первым результатам измерений дальности до спутников; и
вычисляет значения поправок для коррекции погрешностей первых результатов измерений дальности до спутников, при этом значения поправок для коррекции погрешностей содержат значения поправок для коррекции погрешностей результатов измерений фазы несущей; и
пользовательскую подсистему, выполненную таким образом, что она:
принимает значения поправок для коррекции погрешностей из подвижной опорной подсистемы;
получает вторые результаты измерений дальности до спутников согласно сигналам, принятым пользовательской подсистемой из множества спутников, при этом вторые результаты измерений дальности до спутников содержат результаты измерений фазы несущей;
корректирует вторые результаты измерений дальности до спутников с использованием значений поправок для коррекции погрешностей; и
определяет местоположение пользователя на основании скорректированных вторых результатов измерений дальности до спутников; и
причем упомянутая система спутниковой навигации определяет вектор относительного положения путем вычисления разности между местоположением пользователя и опорным местоположением.
16. Считываемый посредством компьютера носитель информации, хранящий запомненные в нем считываемые посредством компьютера команды, которые при их выполнении процессором вызывают выполнение процессором способа навигации первого объекта относительно второго объекта, при этом упомянутые команды содержат:
команды для получения набора результатов измерений согласно сигналам, принятым в первом объекте из множества спутников;
команды для введения поправок в набор результатов измерений с использованием поправок, вычисленных для второго объекта, согласно сигналам, принятым во втором объекте из множества спутников; при этом вторым объектом является подвижный объект, команды для определения поправки к сведениям о местоположении для первого объекта с использованием набора результатов измерений с введенными поправками;
команды для принятия сведений о вычисленном местоположении второго объекта; и
команды для вычисления разности векторов между вычисленным местоположением первого объекта и вычисленным местоположением второго объекта.
17. Считываемый посредством компьютера носитель информации по п.16, дополнительно содержащий команды для добавления поправки к сведениям о местоположении для вычисленного местоположения первого объекта для получения уточненных сведений о местоположении первого объекта.
18. Считываемый посредством компьютера носитель информации по п.17, дополнительно содержащий команды для вычисления обновлений для сведений о местоположении первого объекта с использованием последовательных изменений набора результатов измерений фазы несущей, полученных в первом объекте от множества спутников.
19. Считываемый посредством компьютера носитель информации, хранящий запомненные в нем считываемые посредством компьютера команды, которые при их выполнении процессором вызывают выполнение процессором предназначенного для подвижной опорной станции способа предоставления поправок к результатам измерений, по меньшей мере, в один объект, для которого обеспечивают навигацию, при этом упомянутые команды содержат:
команды для получения результатов измерений кода и фазы несущей в подвижной опорной станции согласно сигналам из множества спутников;
команды для формирования результатов измерений кода, сглаженных по несущей, которые соответствуют результатам измерений кода и фазы несущей;
команды для определения местоположения подвижной опорной станции с использованием результатов измерений кода, сглаженных по несущей;
команды для вычисления теоретической дальности между подвижной опорной станцией и каждым из множества спутников с использованием сведений о местоположении опорной станции;
команды для вычисления поправок к результатам измерений с использованием упомянутой теоретической дальности;
команды для передачи местоположения опорной станции и поправок к результату измерений, по меньшей мере, в один объект, для которого обеспечивают навигацию, чтобы позволить вычисление разности векторов между вычисленным местоположением, по меньшей мере, одного объекта, для которого обеспечивают навигацию, и местоположением опорной станции.
| US 5899957 А, 04.05.1999 | |||
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| Механический усилитель мощности | 1975 |
|
SU609935A1 |
| US 6100842 A, 08.08.2000 | |||
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |

