Настоящее изобретение относится к способу и системе для спутниковой навигации в реальном масштабе времени при использовании передаваемых спутником трех сигналов несущей частоты и ионосферных коррекций, а более точно коррекций, получаемых посредством непрерывно обновляемой ионосферной модели в реальном масштабе времени, причем модель основана на данных, получаемых из системы спутниковой навигации, например, реализованной как пространственная воксельная модель.
Способ, в частности, хотя и не исключительно, применим в области высокоточной мгновенной навигации, как правило, имеющей точность в пределах одного дециметра, как будет показано ниже, на расстояниях порядка сотен километров или более.
В дальнейшем для иллюстрации мы будем ниже сосредоточены на предпочтительном использовании настоящего изобретения без какого-либо ограничения его объема.
В одном из современных обычно используемых способов получения точного позиционирования "объекта", неподвижного или движущегося, а в последнем случае данных относительно его положения, его движения, направления его движения и/или его скорости, необходимо использовать радиосигналы, передаваемые искусственными спутниками, движущимися по орбите земли. Термин "объект" должен пониматься в самом общем смысле, а именно как наземное, морское или воздушное транспортное средство. Для простоты мы будем ниже ссылаться на этот "объект" как на "мобильный аппарат".
Имеются различные известные способы получения вышеупомянутого позиционирования. В частности, они основаны на знании мгновенного положения нескольких искусственных спутников в пространстве (или комбинации искусственных спутников, так как эти искусственные спутники могут быть или могут не быть геостационарными) и скорости распространения радиоволн. На искусственных спутниках установлены высокоточные тактовые генераторы и передаваемые сигналы включают в себя данные временных отметок, которые делают возможным точное знание момента передачи и приема данных. Таким образом, представляется возможность определения теоретического расстояния, отделяющего искусственный спутник в виду мобильного аппарата от последнего в данный момент, зная скорость распространения волн и время, которое необходимо для достижения мобильного аппарата. Если поддается наблюдению достаточное число искусственных спутников, то, следовательно, представляется возможным определение координат мобильного аппарата относительно системы отсчета в двух измерениях (долгота и широта на земле) или даже в трех измерениях (долгота, широта и высота/вертикаль).
Однако, как будет показано, вследствие накопления ошибок в измерениях вследствие разных причин, вычисленные расстояния являются только приближенными и определение положения мобильного аппарата в более или менее существенной степени страдает неточностью, в зависимости от используемых способов.
Одной из наиболее известных спутниковых навигационных систем является система, известная как система "GPS" (глобальная система позиционирования или глобальная система навигации и определения положения).
Как правило, искусственные спутники "GPS" (или подобной системы) обеспечивают передачу в двух диапазонах частот, обычно обозначаемых L1 (несущей частоте, равной 1,575 ГГц) и L2 (несущей частоте, равной 1,227 ГГц), следовательно, зависимой "дуальной частоте", которая прикладывается к ним.
Использование этих двух частот в соответствии с определенными способами, хорошо известными квалифицированным специалистам в этой области техники, делает возможным улучшение точности определения положения мобильного аппарата относительно системы отсчета, но требует того, чтобы приемники "GPS" были более сложными и более дорогими.
Определение положения может быть сделано при использовании двух основных способов: в реальном масштабе времени или после совершения, благодаря выполнению того, что известно как "последующая обработка". Первый случай обычно называют разрешением "одного периода дискретизации" (термин, который будет использоваться ниже) или мгновенным разрешением, причем вычисления выполняются в течение "периода дискретизации" одного наблюдения. Второй способ ("последующей обработки") делает возможным улучшение точности. Однако, в то время как последний способ не имеет каких-либо основных недостатков для медленно движущихся мобильных аппаратов (например, кораблей), он не пригоден для мобильных объектов, которые движутся очень быстро (например, для самолетов).
Точность может быть дополнительно улучшена путем комбинирования сигналов, передаваемых искусственными спутниками с сигналами, исходящими из стационарных наземных опорных станций спутниковой связи, положения которых являются хорошо известными. Однако если мобильный аппарат проходит большие расстояния, то необходимо, чтобы эта сеть станций была относительно плотной, особенно в тех случаях, где высокая точность требуется для определения положения мобильного аппарата, что соответственно увеличивает стоимость глобальной системы.
Кроме того, среди многочисленных причин ошибок дифференциальная ионосферная рефракция при рассмотрении расстояний, равных десяткам километров или более, является одной из основных проблем, влияющих на способности мгновенного разрешения неопределенности фазы несущей частоты и, следовательно, на способность обеспечения навигации, в которой точность составляет порядок одного сантиметра с двухчастотными глобальными навигационными спутниковыми системами, например с вышеупомянутой системой "GPS". Эта характеристика останется справедливой по отношению к будущим трехчастотным системам, подобно системе "GALILEO" и "МОДЕРНИЗИРОВАННОЙ ГЛОБАЛЬНОЙ СИСТЕМЕ ПОЗИЦИОНИРОВАНИЯ".
По существу, планируемые в настоящее время системы, в которых используется три несущих частоты, предлагают потенциальные преимущества высокой доли успешных попыток и высокой достоверности в мгновенном разрешении неопределенности с минимальным числом геодезических вычислений. То есть, в частности, вследствие того факта, что становится доступным более высокое количество данных (то есть, в связи с вышеупомянутыми тремя частотами), что, соответственно увеличивает шансы получения мгновенного разрешения неопределенности (одного периода дискретизации).
Но и в этом случае на это разрешение может оказать серьезное влияние ионосферная рефракция, как объясняется ниже.
Для достижения высокой точности в мгновенном определении положения мобильного аппарата, в частности мобильного аппарата, который перемещается на большие расстояния, еще существует необходимость реализации способов, которые делают возможным, в частности, уменьшение вредного влияния ионосферной рефракции.
На предшествующем уровне техники были предложены различные способы, отвечающие такой потребности.
Например, имеется способ, известный как "TCAR" ("разрешение неопределенности трех несущих частот"). Этот способ описан в статье У.Воллата и др., названной "АНАЛИЗ СПОСОБА РАЗРЕШЕНИЯ НЕОПРЕДЕЛЕННОСТИ ТРЕХ НЕСУЩИХ ЧАСТОТ (TCAR) ДЛЯ ТОЧНОГО ОТНОСИТЕЛЬНОГО ПОЗИЦИОНИРОВАНИЯ В ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ GNSS-2", опубликованной в "Proceedings of the ION GPS" 1998, IX-O-13, стр. 1-6.
Имеется также способ, известный как "CIR" ("каскадное целочисленное разрешение"). Этот способ описан в статье Джаево Джанга и др., названной "ОПТИМИЗИЦИЯ КАСКАДНОГО ЦЕЛОЧИСЛЕННОГО РАЗРЕШЕНИЯ С ТРЕМЯ ЧАСТОТАМИ ГРАЖДАНСКОЙ СИСТЕМЫ GPS", опубликованной в "Proceedings of the ION GPS 2000".
В этих двух способах используется один общий подход: неопределенности двойной разности целых чисел последовательно решают путем вычисления тактов частоты волны. Это вычисление осуществляют из самой длинной и самой короткой тактовой длины волны, включая комбинации фаз несущих частот, так называемой "широкой" фазовой дорожки и "особо широкой" фазовой дорожки (с длинами волн 7,480 м и 0,862 м, соответственно) и первой несущей при "L1 частоте" (с длиной волны 0,190 м).
Способ TCAR, в частности, является простым подходом, который пытается решить весь набор неопределенностей мгновенно (в режиме "одного периода дискретизации"). Но на эксплуатационные показатели "TCAR" сильное влияние оказывает декорреляция ионосферной рефракции, которая зависит от расстояния. На самом деле, как описывается ниже, ионосферная задержка является проблемой, если (как в случае двухчастотных систем) значение ее двойного дифференциала составляет более чем 0,26 TECU (что соответствует 4-см задержке для L1).
"TECU" является единицей, используемой для описания определенных электрических характеристик ионосферы. По существу ионосфера может быть описана при использовании карты, которая представляет подсчет общего числа электронов или "ТЕС" ("общего содержания электронов"). Карта представляет интеграцию числа электронов в вертикальном направлении как функцию широты и долготы. Единицу ТЕС называют "TECU" (для "единицы ТЕС"), причем 1 TECU=1016 электронов, содержащихся в цилиндре, поперечное сечение которого составляет 1 м2, совмещенном на линии наблюдения искусственного спутника. Заряженные частицы в ионосфере генерируются солнцем, интенсивность радиации которого изменяется естественно в функции от времени радиации. Поскольку земля вращается на своей оси ниже ионосферного слоя, то обычно считают, что карта "ТЕС" представляет начало отсчета, которое зафиксировано относительно солнца, но которое изменяется в функции от времени.
Как можно видеть из рассмотрения ионосферных ("ТЕС") карт вертикальных задержек, вычисленных из данных "GPS", вышеупомянутый порог может быть легко превышен. Такие карты выпускаются, например, "Лабораторией реактивного движения" Бернского университета и так далее, и публикуются в Интернете "Университетской корпорацией атмосферных исследований" и другими подобными организациями.
Следовательно, для дополнительного улучшения способа "TCAR" был разработан интегральный способ, известный как "ITCAR" ("Интегральный TCAR"). Этот способ описан, например, в вышеупомянутой статье Воллата и др.
В этом способе используют алгоритмы поиска и навигационный фильтр, в котором неопределенности являются частью выходных сигналов, и приближенно оцениваются остаточные ошибки, вызванные ионосферным отражением. За более подробным описанием используемого способа было бы полезно обратиться к этой статье.
Однако, хотя он и обеспечивает значительное улучшение, способ "ITCAR" еще находится под влиянием отсутствия знания двойной разности ионосферной рефракции, ограничивающего, таким образом, величину успеха разрешения неопределенности для расстояний более нескольких десятков километров, как описано в статье Воллата и др., названной "РАЗРЕШЕНИЕ НЕОПРЕДЕЛЕННОСТИ ПРИ ИСПОЛЬЗОВАНИИ ТРЕХ НЕСУЩИХ ЧАСТОТ - ВЫПОЛНЕНИЕ АНАЛИЗА ПРИ ИСПОЛЬЗОВАНИИ ДАННЫХ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ", опубликованной в "GNSS Symposium", Seville, May 2001.
Также было предложено, и в этом случае ввиду улучшения точности определения положения мобильного аппарата относительно начала отсчета, для комбинирования ионосферной модели в реальном масштабе времени, получаемой из данных "двух частот", генерируемых сетью стационарных станций, с данными из геодезической программы, и для использования таких данных для осуществления ионосферных коррекций. Этот способ использовался с некоторым успехом в разрешении неопределенностей в реальном масштабе времени в двухчастотных системах типа "GPS".
Один способ этого типа, названный "WARTK" ("Глобальная кинематика в реальном масштабе времени"), описан, например, в статье Хернандес-Паджерес и др., названной "ТОМОГРАФИЧЕСКОЕ МОДЕЛИРОВАНИЕ ИОНОСФЕРНЫХ КОРРЕКЦИЙ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ: ОЦЕНКА И ИСПОЛЬЗОВАНИЕ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ", опубликованной в "ION GPS", 19-22 September 2000, pages 616-625. Этот способ делает возможным ослабить вредные влияния шума, вызываемые радиоволнами, распространяющимися в ионосфере, и, следовательно, существенно улучшить величину успеха фазового разрешения неопределенности и определения положения мобильного аппарата относительно начала отсчета, но он требует большого числа вычислений для получения вышеупомянутой модели в реальном масштабе времени и для определения, также в реальном масштабе времени, ионосферных коррекций для использования в измерениях расстояния.
Задачей настоящего изобретения является устранение недостатков способов и систем, соответствующих предшествующему уровню техники, некоторые из которых были упомянуты выше.
Задачей настоящего изобретения является обеспечение способа для высокоточной навигации в реальном масштабе времени (определение положения мобильного аппарата, как правило, лучше, чем один дециметр) при использовании трех несущих радиосигналов, передаваемых искусственными спутниками, и ионосферных коррекций, получаемых из данных в ионосферной модели, описывающей область, проходимую радиоизлучением, в комбинации с геодезическими данными.
В конечном счете, в соответствии с первой важной характеристикой настоящего изобретения используется простой способ мгновенного разрешения ("одного периода дискретизации") неопределенностей, передаваемых искусственным спутником трех несущих фаз вышеупомянутого "TKAR" типа. Точные ионосферные коррекции в реальном масштабе времени, основанные на описательной ионосферной модели, генерируются стационарными опорными станциями спутниковой связи. Эти ионосферные коррекции передаются к пользователям, которые включают их в "TKAR".
Настоящее изобретение имеет три важных преимущества.
Способности, характерные для настоящего изобретения, создания возможности получения более хороших эксплуатационных показателей, чем у способа "ITCAR", на больших расстояниях, в положении очень далеком от ближайшей опорной станции спутниковой связи. Способ, соответствующий настоящему изобретению, как правило, обеспечивает возможность мгновенного разрешения более 90% неопределенностей на более чем на 100 километрах от этой станции, и практически 100% на расстоянии порядка 60 км, даже при не очень благоприятном рабочем сценарии: низких ионосферных значениях и условиях максимального солнечного света.
В поддающихся сравнению условиях способы, соответствующие предшествующему уровню техники, в которых используются три несущие частоты, достигают типовой величины успеха, которая составляет только порядка 60%.
Просто понять, что эта последняя характеристика является очень выгодной, поскольку она не требует установки очень плотной сети стационарных наземных опорных станций спутниковой связи (станций, отстоящих друг от друга на сотни километров). Результатом является очень существенная общая экономия, например, в случае Европы: для охвата этого континента можно уменьшить число опорных станций спутниковой связи на 99% по сравнению с сетью, в которой опорные станции спутниковой связи отстоят друг от друга только на расстоянии порядка десяти километров, при сохранении той же точности в определении положения мобильного аппарата, которую получают при использовании способов, соответствующих предшествующему уровню техники. То есть, на самом деле плотность установки, требуемая для получения точности навигации лучше одного дециметра, как в соответствии со способом, соответствующим настоящему изобретению, в его предпочтительном применении. Кроме того, сеть стационарных наземных опорных станций спутниковой связи, требуемая способом, соответствующим настоящему изобретению, очень подобна сети, обычно устанавливаемой для европейской спутниковой навигационной системы, известной благодаря аббревиатуре "EGNOS GNSS" ("Европейская геостационарная навигационная оверлейная система - Глобальные навигационные спутниковые системы"). Эта система основана на комбинации искусственных спутников "IMMERSAT III", которая предлагает, что имеется существенная совместимость с установками, которые существуют в настоящее время или которые находятся в процессе установки.
Тем не менее, способ, соответствующий настоящему изобретению, является еще довольно простым, подобно способу "TCAR". В частности, он требует от пользователя (приемника мобильного аппарата) только небольшого числа вычислений по сравнению со способами "ITCAR" и "WARTK", которые были разработаны для двухчастотных позиционирующих систем, как описано выше.
Кроме того, описательная ионосферная модель области в реальном масштабе времени, проходимая радиоизлучением, передаваемым наблюдаемыми искусственными спутниками, использует только данные фазы несущей частоты, причем эти данные комбинируются с геодезическими оценками, вычисленными в одном центре, который может быть одной из станций в сети опорных станций спутниковой связи, называемой ведущей радиостанцией спутниковой связи.
Следовательно, основной задачей настоящего изобретения является получение способа навигации в реальном масштабе времени, использующего три несущих радиосигнала первой, второй и третьей разных частот, которые увеличиваются в значении от указанной первой до указанной третьей частоты, для определения положения пользователя, названного мобильным аппаратом, причем указанные сигналы передаются данным числом передатчиков, установленных на борту искусственных спутников, движущихся по орбите вокруг земли и в виду указанного мобильного аппарата, при этом указанные сигналы принимаются приемником, ассоциируемым с указанным мобильным аппаратом и приемником, ассоциируемым, по меньшей мере, с одной наземной станцией спутниковой связи среди множества стационарных наземных станций, называемых опорными станциями, причем указанные радиосигналы проходят через так называемый ионосферный слой атмосферы, окружающий указанную землю, и испытывают возмущения, которые генерируют фазовые неопределенности в указанных несущих частотах, отличающегося тем, что он предусматривает, по меньшей мере, следующие этапы:
первый этап, заключающийся в определении в указанном мобильном аппарате так называемой неопределенности "особо широкой фазовой дорожки" разностей фазы между указанной третьей и указанной второй несущими частотами из комбинации псевдодальностей, использующих одно кодовое значение;
второй этап, заключающийся в оценке, в указанном мобильном аппарате, так называемой, неопределенности "широкой фазовой дорожки" разностей фаз между указанными первой и второй несущими частотами из указанной неопределенности "особо широкой фазовой дорожки", определенной в течение указанного первого этапа;
третий этап, заключающийся, в указанном мобильном аппарате, в разрешении неопределенности одной из указанных частот из указанной неопределенности "широкой фазовой дорожки", оцененной в течение указанного второго этапа; и
дополнительный этап для применения в реальном масштабе времени ионосферных коррекций в течение указанного третьего этапа, причем указанные ионосферные коррекции основаны на непрерывно обновляемой в реальном масштабе времени ионосферной модели указанного слоя.
Другой задачей настоящего изобретения является получение спутниковой навигационной системы, которая реализует этот способ.
Далее настоящее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, где
Фиг.1А - схематическая иллюстрация частичного поперечного сечения земли и ионосферного слоя, который окружает ее, разрезанного на воксели, а также радиолучей, генерируемых передатчиками "GPS" на трех искусственных спутниках связи, и трех наземных станций спутниковой связи, принимающих эти сигналы;
Фиг.1В - схематическая иллюстрация архитектуры полной навигационной системы для реализации способа, соответствующего настоящему изобретению, видимой из GPS-приемника мобильного аппарата;
Фиг.2 - схематическое представление базовой линии и положений наземной опорной станции спутниковой связи и мобильного аппарата, относительно одних осей координат;
Фиг.3 - увеличение фиг.2, иллюстрирующее траекторию мобильного аппарата относительно одних осей координат;
Фиг.4 - график, иллюстрирующий примеры задержек, ожидаемых из ионосферной модели в реальном масштабе времени, соответствующей настоящему изобретению, в сравнении с реальными задержками сигналов в ионосфере;
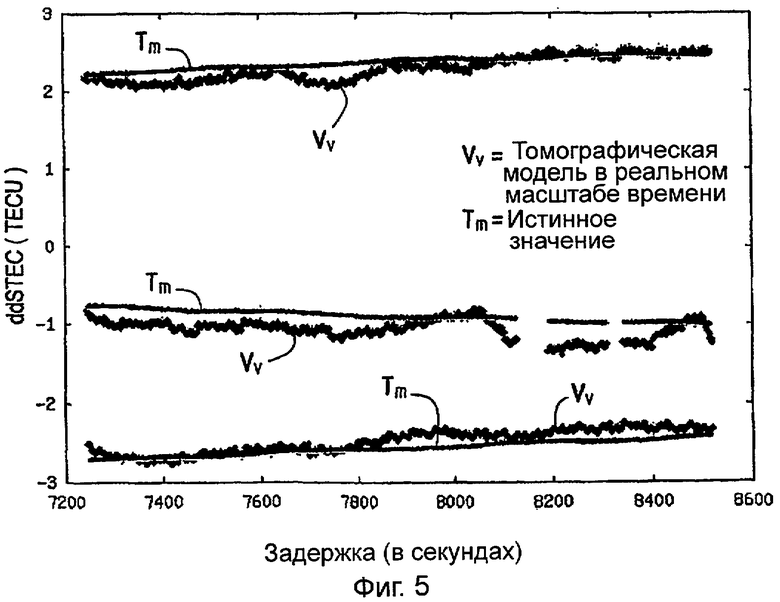
Фиг.5 - график, иллюстрирующий примеры двойных разностей "Наклонного общего электронного содержания" ("STEC"), оцениваемых в реальном масштабе времени с помощью описательной ионосферной модели, в сравнении с реальными значениями;
Фиг.6 - график, иллюстрирующий примеры ошибок в определении ионосферной модели в реальном масштабе времени двойной разности "STEC" в сравнении с двумя ионосферными порогами;
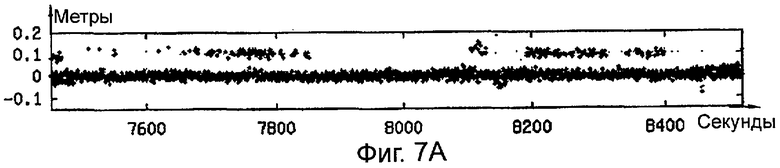
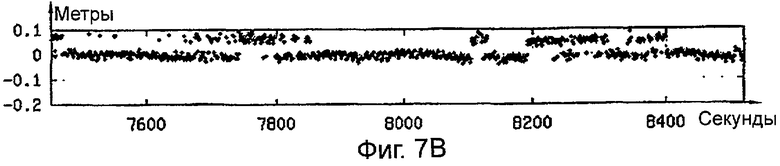
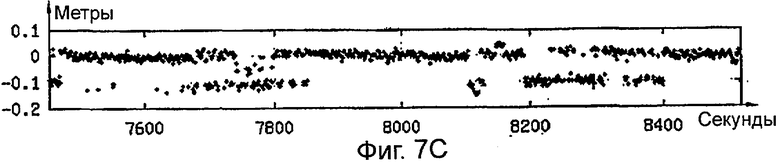
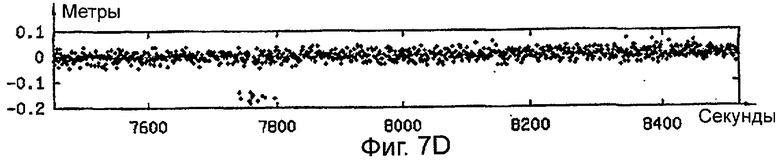
Фиг.фиг.7A-7D - графики, иллюстрирующие примеры оцениваемых ошибок (в метрах) в разных навигационных компонентах;
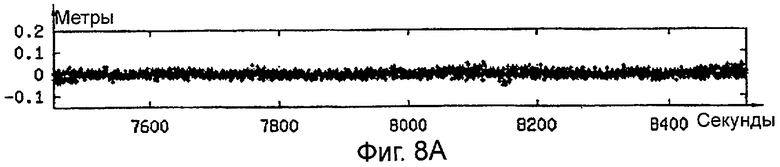
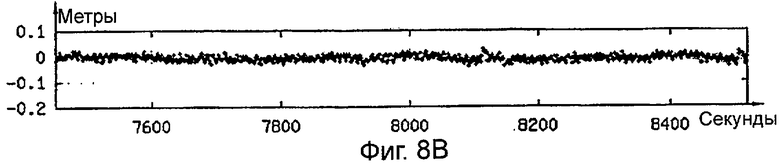
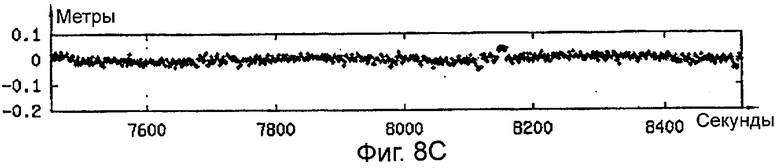
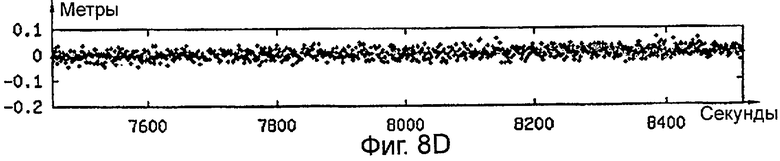
Фиг.фиг.8A-8D - графики, иллюстрирующие примеры реальных ошибок (в метрах) в одних навигационных компонентах;
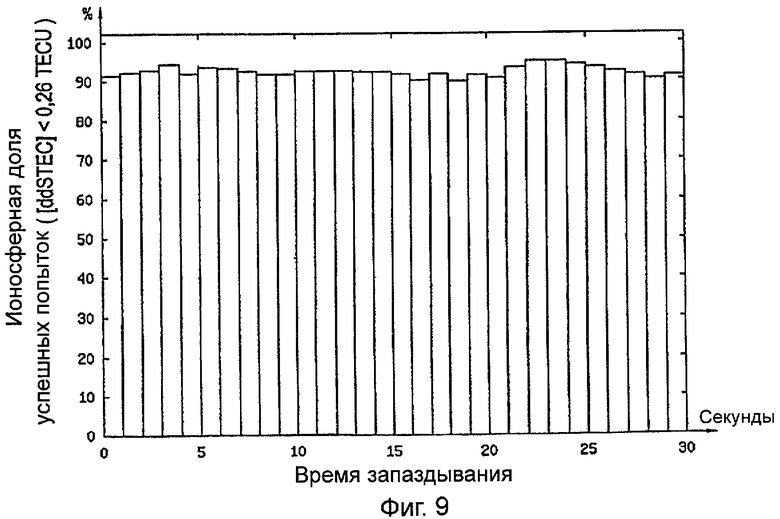
Фиг.9 - график, иллюстрирующий пример доли успешных попыток для мгновенного определения ионосферной двойной разности, которая достаточно велика для разрешения всех неопределенностей (с "TECU" лучше, чем 0,26) для коррекций со временем запаздывания в диапазоне 1-30 секунд; и
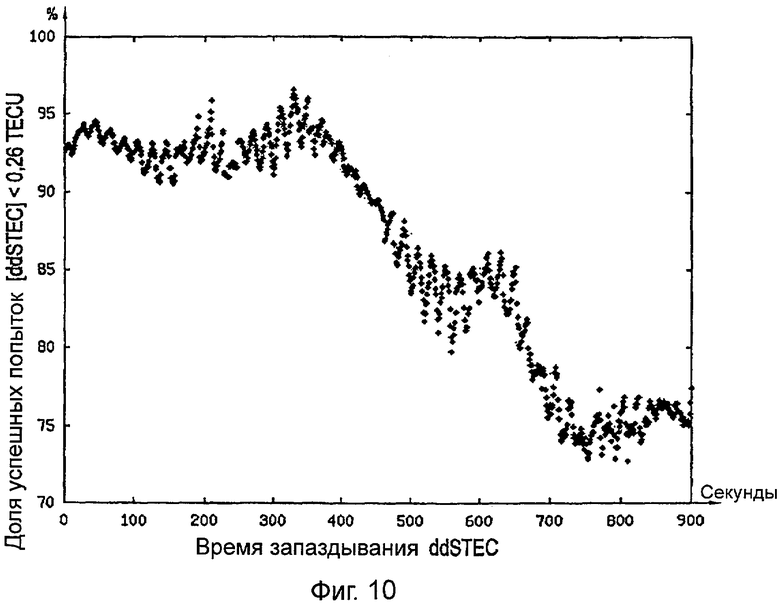
Фиг.10 - график, иллюстрирующий пример доли успешных попыток в мгновенном определении ионосферной двойной разности для коррекций со временем запаздывания до 900 секунд.
Ниже без какого-либо ограничения объема настоящего изобретения мы остановимся на контексте его предпочтительного использования, если не указано другое, то есть на способе высокоточной спутниковой навигации при использовании трех несущих радиоволн разных частот, передаваемых искусственными спутниками, и коррекциях в реальном масштабе времени, полученных из описательной ионосферной модели в реальном масштабе времени области, зондируемой радиочастотным излучением их искусственных спутников.
Далее будут подробно описаны основные этапы способа, соответствующего настоящему изобретению при использовании типичных числовых значений для их иллюстрации. Способ предусматривает три основных этапа, которые подобны этапам вышеупомянутого способа "TCAR" и объясняются ниже:
Этап 1
Для разрешения так называемой неопределенности "особо широкой фазовой дорожки" (с типовой длиной волны 7,5 метров в наборе данных данного экспериментального примера) вводят комбинацию кодов, известных как "псевдодальности".
Среди известных причин ошибок находится явление, так называемого "многолучевого распространения". Хотя многолучевые распространения псевдодальности могут уменьшать долю успешных попыток, эта ошибка, в общем, является низкоамплитудной по сравнению с большой длиной волны "особо широкой фазовой дорожки" и, как правило, возможна для преодоления этой проблемы.
На самом деле, на первом этапе типового способа "TCAR" (смотри, например, вышеупомянутую статью Воллата и др., 1998 года) необходимо оценить двойную разность неопределенности (между парами спутник-приемник), называемую ниже ▿ΔNew, из двойной разности фаз несущей частоты "особо широкой" фазовой дорожки, называемой ниже ▿ΔLew (Lew является длиной волны несущей частоты особо широкой фазовой дорожки), при использовании комбинации "псевдодальностей" (или кодов) Pew, которые разделяют одну величину и знак зависимости от ионосферы, что и комбинации фаз. Это, возможно, дает большую длину волны, получаемую в результате из комбинации особо широкой фазовой дорожки. Величины Lew и Pew могут быть определены с помощью следующих уравнений:
уравнения, в которых Lx является замер фазы несущей частоты (в единицах длины) с частотой fx и с длиной волны λх. Значения Х приведены в прилагаемой ТАБЛИЦЕ I в конце настоящего описания, причем очевидно, что числа 1-3 связаны с тремя частотами в описываемом примере. В ТАБЛИЦЕ I сведено вместе определенное количество связанных данных: частоты, длины волн, зависимость от ионосферы и максимальные ошибки многолучевого распространения и различные замеры, которые полезны для хорошего понимания способа, соответствующего настоящему изобретению. Эти данные связаны с тремя полосами L1-L2 частот, соответственно, и с фазами (Lew и Lw) несущей частоты особо широкой и широкой фазовой дорожки, соответственно. рx является соответствующим замером "псевдодальности". Ошибки многолучевого распространения и измерения для фаз несущей частоты и "псевдодальностей" отмечены как mх, Мх, λx и Ех, соответственно (в ТАБЛИЦЕ I также приведены максимальные значения многолучевого распространения и типичные ошибки измерения). Недифференцированная неопределенность λxbx фазы несущей частоты, которая содержит приборные задержки, после двойного дифференцирования становится мультипликационным целочисленным значением длины волны λx▿ΔNx. Ионосферная задержка αхI пропорциональна наклонному общему электронному содержанию или "STEC", причем интеграция электронной плотности вдоль луча, излучаемого искусственным спутником, обычно измеряется в единицах TECU, как указано выше. В уравнениях (1) и (2) символ ρ* представляет член, который не зависит от частоты (расстояние, ошибки тактовых сигналов, тропосферную рефракцию и так далее).
Из уравнения (2), в котором подробно не представлены второстепенные члены, например, конец фазы несущей частоты, можно оценить двойную разность неопределенности особо широкой фазовой дорожки, называемой ниже  , в периоде дискретизации одного измерения путем вычитания соответствующего кода, как показано в уравнении, приведенном ниже:
, в периоде дискретизации одного измерения путем вычитания соответствующего кода, как показано в уравнении, приведенном ниже:

Если нет существенных многолучевых распространений, оказывающих влияние на приемники (обычно, менее 3,7 м), то предел ошибки такой оценки составляет менее 0,5 цикла (как показано с помощью значений, приведенных в ТАБЛИЦЕ I), что делает возможным мгновенное определение неопределенности до точного целочисленного значения.
Этап 2
Комбинацию неопределенности широкой фазовой дорожки оценивают из неопределенности фазы несущей частоты особо широкой фазовой дорожки, получаемой в течение первого этапа. Большую часть времени разность между этими двумя образуется неопределенностью особо широкой фазовой дорожки и дифференциальной ионосферной рефракцией (приблизительно 0,006 циклов/TECU с рабочими частотами представленного примера). Недисперсивные члены исключаются. Основными проблемами в этом случае являются ошибка измерения и многолучевые распространения сигналов фазы несущей частоты. Хотя типовые значения дифференциальной ионосферной рефракции в средних широтах и с базовыми линиями менее 100 км составляют только несколько TECU, использование ионосферной коррекции может значительно увеличить долю успешных попыток на больших расстояниях и при более трудных ионосферных условиях.
Теперь будут описаны основные детали этого этапа.
Как только первичные неопределенности ▿ΔNew "большой длины волны" решены при использовании соответствующих псевдодальностей, вторичная неопределенность, например, комбинация Lw "широкой фазовой дорожки", описываемая с помощью следующего уравнения

(уравнение, в котором φ1 и φ2 являются фазами с частотами L1 и L2), могут быть оценены из ▿ΔNew и из соответствующей разности фаз несущих частот (смотри соответствующие постоянные значения в ТАБЛИЦЕ I) в соответствии с уравнением:

По существу, при наличии средних многолучевых распространений, ошибочный член, соответствующий уравнению (5), который также включает в себя ошибку измерения, нормально составляет менее 0,3 метра, то есть менее 0,4 цикла. Ошибочный член, остающийся из разрешения неопределенности, соответствует ионосферной рефракции при значении 0,0580 циклов/TECU для частот в этом примере (смотри ТАБЛИЦУ I). Этот член может уменьшить долю успешных попыток, но не является критическим членом на средних широтах и на расстояниях менее нескольких сотен километров, для которых двойные разности значений "STEC", называемые ниже ▿ΔI, в общем, меньше 10 TECU.
Подробный пример будет приведен ниже со ссылкой на диаграмму, иллюстрируемую на фиг.5.
В таком контексте использование ионосферной модели в реальном масштабе времени улучшает условия для успеха разрешения неопределенности "особо широкой фазовой дорожки" в меньших широтах и для условий с более длинными линиями.
Этап 3
Неопределенность фазы L1 происходит из разности между L1 и однозначной "особо широкой фазовой дорожки," полученной ранее. На этом этапе основной проблемой является соответствующая дифференциальная ионосферная рефракция (приблизительно 1,9 циклов/TECU), которая может давать ошибки нескольких циклов в средних широтах.
На третьем этапе реализуется подход, аналогичный подходу, используемому на втором этапе, но при использовании разностей фаз несущих частот между короткими и средними длинами волн, вместо средних и больших длин волн, как это очевидно из следующего уравнения (6):

уравнения, в котором α1 и αw (в общем, αх) являются ионосферными коэффициентами, определенными в ТАБЛИЦЕ I, в описываемом примере.
В течение третьего этапа комбинация ошибки измерения фазы несущей частоты и среднего многолучевого распространения вводит другую ошибку, как правило, менее 0,2 цикла (смотри ТАБЛИЦУ I). Однако в этом случае критической проблемой является ионосферная рефракция, которая также может вводить ошибки более 0,5 цикла (-1,945 циклов/TECU) для коротких базовых линий.
Основное ограничение может быть преодолено путем вычисления ионосферных коррекций в реальном масштабе времени лучше чем 0,26 TECU (то есть 0,5 циклов х TECU/1,9475) для того, чтобы гарантировать правильную целочисленную оценку неопределенности. Эти коррекции вводят на этапе 4, который будет описан ниже.
Этап 4
Для преодоления проблемы, которая возникает на третьем этапе (то есть для определения неопределенностей самых коротких длин волн), для оценки дифференциальной ионосферной рефракции определяют модель в реальном масштабе времени. Эту модель вычисляют из данных несущей двухчастотной фазы в фиксированных местоположениях в сети опорных станций спутниковой связи. Предполагается, что таким образом получается описание ионосферной области прошедшей через радиоизлучение, передаваемое искусственным спутником. Данные этой модели комбинируют известным образом сданными, полученными из одновременного геодезического вычисления, причем последнее предпочтительно может выполняться на одной из стационарных наземных станций спутниковой связи в сети, называемой ведущей радиостанцией. Основным преимуществом этого способа является то, что он делает возможность оценки дифференциальной рефракции с типовой ошибкой менее 0,25 TECU, даже на расстояниях сотен километров от ближайшей опорной станции и в непостоянных ионосферных условиях. Это точность, как правило, предусматривает ошибки менее 0,5 цикла при мгновенных определениях неопределенности L1 для средних и больших расстояний.
Распределение свободных электронов в ионосфере может быть приблизительно определено с помощью решетки из объемных единиц разрешения или "вокселей", в которой плотность распределения электронов в системе инерционно центрированной земли предполагается постоянной в данный момент.
Типовое устройство этого вида описано на фиг.1А. На фиг.1А схематически иллюстрируется меридианное сечение из вокселей VOXijk (причем i, j, k являются координатами, обозначающими долготу, широту и высоту, соответственно), в котором плотность распределения электронов в ионосфере разрушена в соответствии с уравнением (7) для определения данных ионосферной модели в реальном масштабе времени.
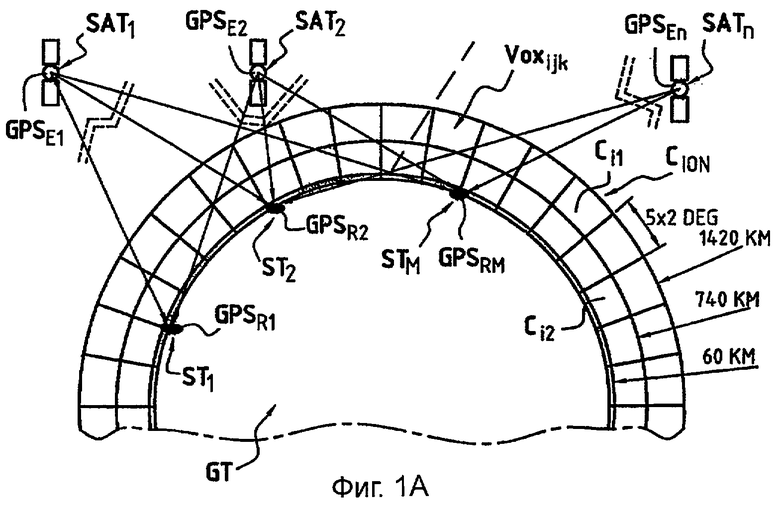
На этой фиг.1А земля GT показана в частичном разрезе окруженной слоем CION ионосферы, который был произвольно разделен на два промежуточных слоя Сi1 и Ci2, соответственно. Нижняя высота слоя Сi1 в описываемом примере составляет 60 км, а верхняя высота составляет 740 км. Нижняя высота слоя Сi2 составляет 740 км, а его верхняя высота составляет 1420 км. Угловые поверхности векселей VOXijk составляют 5×2 градусов каждая.
В качестве иллюстрации мы представили искусственные спутники SAT1-SATn (три из которых показаны на чертежах), на которых установлены передатчики GPS, GPSE1-GPSEn, соответственно. Эти спутники SAT1-SATn находятся в виду всех или некоторых из наземных станций спутниковой связи, например, трех стационарных опорных станций ST1-STм, показанных на фиг.1А, которые содержат приемники GPS, GPSR1-GPSRn, и интегральные вычислительные средства (не показаны).
На фиг.1В схематически иллюстрируется архитектура полной навигационной системы, соответствующей настоящему изобретению, видимая из мобильного аппарата SUR.
Эта система требует компьютера, интерфейсов и физических ресурсов, подобных тем, которые используются в некоторых современных развернутых системах, например, EGNOS или WAAS.
Эта система для реализации способа, соответствующего настоящему изобретению, содержит приемник GPS, SURGPS, который принимает сигналы, передаваемые искусственными спутниками, например, искусственными спутниками SAT1-SATn, показанными на фиг.1А. Из этих сигналов трех полос частот реализуются три этапа способа TCAR, как показано выше, при использовании интегральных вычислительных средств (не показано).
Он также принимает сигналы данных из ионосферной модели в реальном масштабе времени, определяемой опорной станцией REF (ближайшей из станций спутниковой связи в сети наземных опорных станций ST1-STM, показанных на фиг.1А) из сигналов, принимаемых от спутников SAT1-GPSE1-SANn-GPSEn при использовании приемника GPS, REFGPS. Станция REF передает данные из модели мобильному аппарату SUR при использовании передатчика REFE1.
Данные геодезической конфигурации, которые могут быть определены в одной так называемой ведущей станции REFM, передаются с помощью ее передатчика REFME и распространяются к мобильному аппарату SUR для комбинирования с данными из ионосферной модели. Как правило, эта станция также имеет приемник GPS, REFMGPS, как и другие стационарные наземные опорные станции спутниковой связи. Данные геодезической конфигурации вычисляют одновременно с данными геодезической модели.
Способом, который является хорошо известным, ионосферные вычисления могут быть получены путем решения в реальном масштабе времени, при использовании фильтра Кальмана, средней электронной плотности Ne каждой облученной ячейки i, j и k (символами i, j и k обозначены координаты трех измерений, как определено выше), обрабатываемые подобно процессу произвольного распространения, и с типовым функциональным шумом 109-1010 электронов/м3/√час. Например, процесс использования фильтра Кальмана описан в книге Г.Дж.Бирмана "Методы выделения множителей для дискретной последовательной оценки", опубликованной в Mathematics in Science and Engineering, Vol. 128, Academic Press, New York, 1977.
В соответствии с важной характеристикой способа, соответствующего настоящему изобретению, используются только данные фазы несущей частоты. Следовательно, предотвращаются помехи кода псевдодальности и многолучевое распространение. Поляризации B1 фазы несущей частоты (постоянная в каждой непрерывной дуге данных фазы несущей частоты для каждой пары спутник-приемник) оцениваются одновременно, как случайные величины (которые становятся случайными процессами белого шума, когда имеет место проскальзывание цикла). В фильтре поляризации декоррелируются в реальном масштабе времени из величин электронной плотности, поскольку геометрия спутников изменяется и изменения двух типов неизвестных становятся меньше, как показано в уравнении (7), приведенном ниже, которое представляет модель для данной ионосферной информации между парой спутник-приемник глобальной навигационной спутниковой системы, причем L1 и L2 являются фазами несущей частоты, выраженными в единицах длины, Li=L1-L2, а Ne является электронной плотностью). L1 задается следующим уравнением:

в котором величины "REC" и "SAT" относятся к приемнику и спутнику GPS, соответственно, пары "приемник-спутник", dl является элементарным расстоянием на линии визирования, связывающей эту пару, а Δsi,j,k является элементарной координатной поверхностью STEC, a i,j,k - обозначения координат для трех измерений, как указано выше.
Этот подход, в частности, пригоден для определения локальных характеристик распределения электронной плотности, а использование двух слоев с наземными данными из глобальной навигационной спутниковой системы (сокращенно "GNSS") вместо одного слоя, как в обычных способах, значительно уменьшает опасность плохого моделирования электронного содержания.
В случае сетей "WADGNESS" ("Дифференциальная глобальная навигационная спутниковая система для обслуживания большого района") это возможно из содержания этих коррекций в реальном масштабе времени наклонного общего электронного содержания или "STEC", полученного с помощью уравнения (7):
во-первых, для образования двойной разности ▿ΔSTEC станция-спутник с ошибкой менее 1 TECU для получения вторичной неопределенности (то есть "широкой дифракционной дорожки") в опорной станции спутниковой связи; и
во-вторых, для интерполяции в приемнике мобильного аппарата однозначного (недвусмысленного) значения L1, то есть очень точного значения ▿ΔSTEC на уровне нескольких сотых TECU, полученного после разрешения неопределенностей.
Если интерполированное значение лучше 0,26 TECU, то приемник мобильного аппарата может разрешить обе неопределенности в реальном масштабе времени.
Этот способ по существу подобен так называемому способу "WARTK", опубликованному в вышеупомянутой статье Хернандеса-Паджереса и др. (2000). Результаты, полученные до сих пор с использованием способа "WARTK" в нескольких экспериментах, суммированы в другой статье Хернандеса-Паджереса и др. "Томографическое моделирование ионосферных коррекций глобальной навигационной системы: оценка и использование в реальном масштабе времени", опубликованной в "ION GPS 2001", September, 2001. Будет полезно сослаться на эти две статьи для более подробного описания этого способа.
В кинематическом использовании этого способа одно из важных ограничений заключается в существовании локальных ионосферных неоднородностей, например, распространяющихся ионосферных возмущений или TID ("Мобильных ионосферных возмущений", которые могут давать некорректные результаты при использовании линейной интерполяции ионосферных коррекций между опорными станциями в сети. Эксплуатационные показатели могут быть улучшены путем введения данных, полученных при использовании двух частот, из мобильного аппарата.
Кроме того, в случае вычисления на опорной станции, длинные расстояния и большие градиенты электронного содержания также могут ограничивать эксплуатационные показатели этого способа. По этой причине в соответствии с характеристикой способа, соответствующего настоящему изобретению, была разработана дополнительная процедура для предусмотрения случая стационарных и/или опорных станций, разделенных тысячами километров, при использовании, так называемого, кода плавной "широкой фазовой дорожки", для улучшения ионосферной модели и, следовательно, для содействия определению неопределенности в реальном масштабе времени. Такая процедура описана, например, в статье Хернандеса-Паджереса и др. "Улучшение ионосферных вычислений в реальном масштабе времени на участках GPS на очень больших расстояниях через экватор", опубликованной в Journal of Geophisical Research, 2002.
Однако способы, используемые на предшествующем уровне техники, для решения в реальном масштабе времени неопределенности в приемнике мобильного аппарата при использовании двухчастотной системы глобального позиционирования требуют большого числа геодезических вычислений для обеспечения гарантии относительно хорошего определения положения, на уровне примерно двадцати сантиметров, для разрешения комбинаций свободноплавающей ионосферной поляризации и, следовательно, для способности (при использовании вышеупомянутого способа "WARTK") разрешения неопределенности в реальном масштабе времени, после времени конвергенции в течение нескольких минут.
Настоящее изобретение делает возможным преодоление этих недостатков предшествующего уровня техники, в частности способа "WARTK". Оно делает возможным улучшение мгновенных способов для разрешения неопределенностей фазы трех несущих частот на средних и длинных расстояниях между опорными станциями (в диапазоне от десятков до сотен километров) и с минимальным числом геодезических вычислений. Основное улучшение лежит в третьем этапе вышеупомянутого способа "TCAR" при использовании ионосферных коррекций в реальном масштабе времени, прикладываемых посредством ионосферной модели, вычисляемой непрерывно в опорных станциях.
Дополнительное улучшение вышеупомянутого этапа также реализуется в способе, соответствующем настоящему изобретению. Это улучшение заключается в использовании трех различных кодов псевдодальности, называемых в этой заявке Р1, Р2, Р3, вместо одного кода, что делает возможным уменьшения эффекта многолучевого распространения в разрешении неопределенности "особо широкой фазовой дорожки".
Помимо этого, в предпочтительном варианте осуществления выполняется проверка достоверности при использовании псевдодальности, "широкой фазовой дорожки" и кодов полосы частоты Ц для определения скачков в оценке неопределенности, связанных с ошибкой в разрешении неопределенности самой длинной волны. По существу в течение вышеупомянутых первого и второго этапов вполне очевидно из уравнений (5) и (6), что один цикл в ошибке неопределенности "особо широкой фазовой дорожки" дает приблизительно восемь циклов ошибки "широкой фазовой дорожки", и один цикл ошибки "широкой фазовой дорожки" преобразуется в приблизительно четыре цикла ошибки L1, являющейся несущей частотой с самой короткой длиной волны в описываемом примере. Очень часто эти скачки при оценке неопределенности являются достаточно большими для определения и фильтрации при использовании соответствующих кодов.
Этот способ, соответствующий настоящему изобретению, делает возможным непосредственное преодоление главных ограничений, которые делают невозможной навигацию с типичной ошибкой менее нескольких сантиметров на больших расстояниях (более 100 километров).
В ТАБЛИЦЕ II, представленной в конце настоящего описания, кратко приведены сравнительные характеристики основных способов разрешения неопределенности в реальном масштабе времени, соответствующих предшествующему уровню техники ("TCAR", "ITCAR", "WARTK"), и способа, соответствующего настоящему изобретению.
Для более хорошей иллюстрации основных характеристик способа, соответствующего настоящему изобретению, теперь мы опишем пример эксперимента, выполненного на основе нескольких наборов данных, передаваемых модифицированными генераторами сигналов, установленными на искусственных спутниках в существующей системе вышеуказанной глобальной навигационной спутниковой системе типа "GNSS", с имитацией самолетов, наземных пользователей мобильных аппаратов (например, наземных транспортных средств) или стационарных объектов. Принимались во внимание различные динамические и ионосферные условия.
В качестве иллюстрации и для обеспечения значительного примера было проведено подробное изучение разрешения в реальном масштабе времени неопределенности приемника наземного транспортного средства, называемого ниже мобильным аппаратом SUR, относительно стационарной опорной станции спутниковой связи, называемой ниже REF, отстоящей от мобильного аппарата SUR приблизительно на 129 километров, в различных ситуациях. В описываемом примере две несущие частоты GPS (1575,42 и 1227,60 МГц, соответственно) и 24-канальный носитель системы "GLONASS" с частотой 1615,50 МГц составляют три частоты, адаптированные имитатором системы "GNSS" для четырех видимых искусственных спутников в течение 20 минут при 1 Гц, при использовании двенадцати доступных каналов имеющего юридическую силу приемника типа, известного как "AGGA" ("Улучшенный тип GPS/GLONASS ASIC"). "AGGA" является цифровой интегральной схемой, которая обеспечивает возможность высокоскоростной обработки цифрового сигнала для космических применений, например, радиозаметных сигналов системы "DNSS" и определений низкой околоземной орбиты. Эта схема основана на стандартной интегральной схеме "ASIC" (или "Интегральной схеме частного применения"), (в описываемом примере компонент ATMEL T7905E). "GLONASS" ("Глобальная орбитальная навигационная спутниковая система") является российской спутниковой навигационной системой, которая сравнима с системой "GPS".
В описываемом примере рассматривали два основных набора данных, называемый ниже набор "Р5-М0", связанный с минимальной мощностью сигнала и без многолучевого распространения, который представляет собой идеальный случай, и набор "Р3-М1", связанный со средней мощностью и наличием многолучевого распространения.
Помимо приемников опорных станций, имитируемых в наборах данных, для ионосферных вычислений было добавлено еще три станции, существующие в сети "IGN" ("Международной службы GPS"), на расстояниях более 200 километров, которые делают возможным имитации более реалистичной ситуации, содержащей более крупную сеть стационарных пунктов связи.
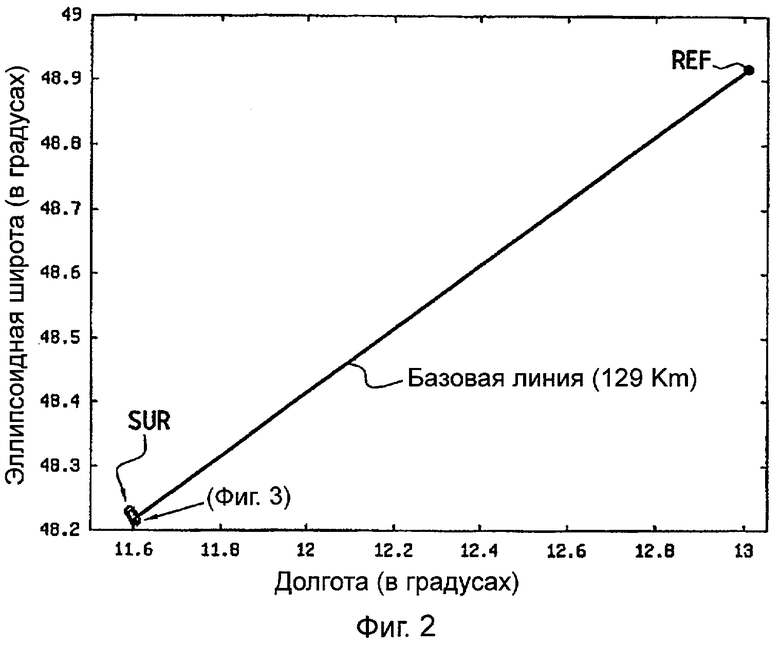
Теперь мы покажем результаты подробного изучения самого трудного случая, то есть самой протяженной базовой линии пары "мобильный аппарат SUR - станция REF", или приблизительно 129 километров. Опорная станция REF является одной из станций ST1-STM, показанных на фиг.1А.
На фиг.2 иллюстрируется этот пример, базовая линия и положения станции REF и мобильного аппарата SUR относительно осей координат, эллипсоидной широты и долготы, представленных в градусах.
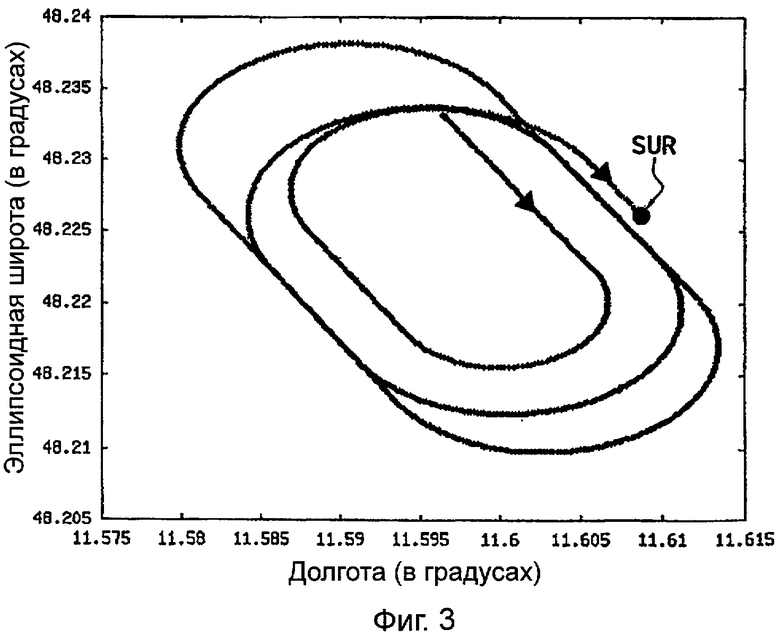
Фиг.3 является увеличенным изображением фиг.2, иллюстрирующим траекторию мобильного аппарата SUR и в этом случае относительно осей координат, эллипсоидной широты и долготы, представленных в градусах.
Первый аспект результатов относится к эксплуатационным показателям в реальном масштабе времени ионосферного фильтра. На фиг.4 представлены примеры оцененных задержек из ионосферной модели в реальном масштабе времени, указанными на графике символом Tm, в сравнении с реальными ионосферными задержками, указанными символом Vv. Эти значения соответствуют измерениям из эксперимента, сделанного для иллюстрации возможностей способа, соответствующего настоящему изобретению.
Для точной навигации более важны также параметры, значения и разности (то есть ошибки) между оцененными двойными разностями "STEC",  для мобильного аппарата SUR и их реальными значениями ▿ΔI, как показано на фиг.5 и фиг.6, на которых ордината выражена в единицах TECU, а абсцисса представляет задержки в секундах.
для мобильного аппарата SUR и их реальными значениями ▿ΔI, как показано на фиг.5 и фиг.6, на которых ордината выражена в единицах TECU, а абсцисса представляет задержки в секундах.
Более конкретно, на фиг.5 иллюстрируется двойная разность "STEC", указанная символами "ddSTEC", оцененная в реальном масштабе времени с помощью ионосферной модели, соответствующей одному из важных аспектов настоящего изобретения, в сравнении с истинными значениями для приемника мобильного аппарата SUR относительно самого дальнего приемника, или REF, (на расстоянии приблизительно 129 километров).
На фиг.6 иллюстрируется ошибка в определении ионосферной модели в реальном масштабе времени двойной разности "STEC", и в этом случае указанной символами "ddSTEC". Реальные значения ионосферной модели сравниваются с двумя ионосферными порогами, "Threshold1" (+0,26 TECU) и порогом, "Threshold2" (-0,26 TECU), делая возможным определение третьей неопределенности ▿ΔN1.
Более 92% ионосферных определений имеют ошибки ниже предела порога ±0,26 TECU. Следовательно, они достаточно точны, чтобы делать возможным разрешение трех неопределенностей в отсутствие многолучевых распространений и не принимая во внимание ошибку измерения. Большинство оставшихся 8% оценок, имеющих ошибки более 0,26 TECU, приходят из искусственного спутника, который наблюдался на низкой высоте и в южном направлении, для которого ионосферные градиенты являются наибольшими. Эти результаты были немного улучшены путем добавления к четырем опорным станциям пятой станции, выполняющей вычисления ионосферных коррекций для южного направления.
Как только ионосферные коррекции были вычислены и переданы из опорной сети, описанным способом для оценки мгновенного разрешения (в режиме "одного периода дискретизации") трех неопределенностей на луч могут быть выполнены этапы способа, соответствующего настоящему изобретению, в мобильном аппарате SUR.
Краткое изложение основных результатов разрешения неопределенности для вышеупомянутых наборов "Р5-М0" и "Р3-М1" данных, соответственно, приведены в виде двух таблиц, ТАБЛИЦЫ III и ТАБЛИЦЫ IV, приведенных в конце настоящего описания. Доли успешных попыток трех этапов способа "TCAR" показаны в следующих трех случаях:
(a) без ионосферных коррекций;
(b) с соответствующими коррекциями из модели ионосферной коррекции Клобучара, передаваемой современной системой "GPS",
(c) с коррекциями из ионосферной модели в реальном масштабе времени в соответствии со способом, соответствующим настоящему изобретению.
Более конкретно, в примере, описанном в связи с ТАБЛИЦЕЙ III, доля успешных попыток (в %) относится ко всем 3834 проверкам разрешения в реальном масштабе времени для неопределенностей "особо широкой фазовой дорожки", "широкой фазовой дорожки" и частоты полосы L1 (соответственно, ▿ΔNew, ▿ΔNw, ▿ΔN1) для приемника мобильного аппарата SUR относительно самой дальней стационарной станции REF (на расстоянии приблизительно 129 километров) и с вышеупомянутым набором Р5-М0 идеальных данных (максимальная мощность приема и без многолучевых распространений).
ТАБЛИЦА IV подобна ТАБЛИЦЕ III, но для вышеупомянутого набора Р3-М1 данных (средний уровень мощности приема и многолучевых распространений). Цифры в скобках указывают долю успешных попыток относительно общего числа наблюдений.
Из ТАБЛИЦЫ III и ТАБЛИЦЫ IV вполне очевидно, что способ, соответствующий настоящему изобретению, который комбинирует три этапа способа "TCAR" с этапом применения точной ионосферной модели в реальном масштабе времени, делает возможным значительное увеличение долей успешных попыток мгновенного определения неопределенности не только при идеальном сценарии (набор Р5-М0 данных: от 0 до 92%), но также при более трудном сценарии (набор Р3-М1 данных) с многолучевым распространением (35% даже при использовании коррекции модели Клобучара, тогда как доля успешных попыток достигает 92% для ▿ΔN1 с коррекциями из ионосферной модели, получаемой в соответствии со способом, соответствующим настоящему изобретению).
Из ТАБЛИЦЫ IV очевидно, что одной из важных проблем, возникающих при использовании набора Р3-М1 данных, подвергаемых воздействию многолучевого распространения, является отсутствие достоверности оценок неопределенности в соответствии со способом "TCAR", ▿ΔNew и ▿ΔNw, приблизительно с 10% и 4% некорректных мгновенных определений соответственно.
Для увеличения достоверности, то есть для уменьшения возможности разложения на множители в некорректных неопределенностях в этом случае в присутствии фазы несущей частоты и для кодирования на каждом из многолучевых распространений, можно использовать соответствующую псевдодальность, "широкую фазовую дорожку" и коды L1 для попытки определения ошибок определения потенциальной неопределенности предшествующей самой длинной длины волны в способе "TCAR" (неопределенности "особо широкой фазовой дорожки" и "широкой фазовой дорожки", соответственно), ошибки которых усиливаются в 9 и 4 раза длинами волн в "особо широкой фазовой дорожке" и "широкой фазовой дорожке", соответственно, как показано в уравнениях (5) и (6).
Краткое изложение соответствующих результатов представлено в виде двух таблиц, ТАБЛИЦЫ V и ТАБЛИЦЫ VI, расположенных в конце настоящего описания, соответственно, при использовании псевдодальностей и сглаженных псевдодальностей для отфильтровывания таких важных ошибок.
ТАБЛИЦА V подобна ТАБЛИЦЕ II, но в этом случае долю успешных попыток разрешения неопределенности после проведения проверки достоверности, то есть сравнения с неопределенностью, полученной из псевдодальности, для фильтрации больших скачков в неопределенности "широкой фазовой дорожки" и L1, причем эти скачки имеют место вследствие предшествующих ошибок неопределенности большей длины волны. В последнем столбце указана доступность, то есть процент от 3834 наблюдений, которые проходят предшествующую проверку достоверности с псевдодальностями. Цифра в скобках "*" указывает процент неопределенностей, вычисленных после прохождения проверки достоверности. Как и прежде, цифры в скобках указывают на долю успешных попыток относительно всего числа наблюдений.
ТАБЛИЦА VI подобна ТАБЛИЦЕ III, но для выполнения проверки достоверности вместо "чистых" псевдодальностей используют сглаженные псевдодальности.
Вполне очевидно, что способ, соответствующий настоящему изобретению, обеспечивает значительное улучшение, составляющее приблизительно 20%, в достоверности (от 79% в ТАБЛИЦЕ IV до 91% в ТАБЛИЦЕ VI), с относительно небольшим уменьшением (16%) в доступности (которая уменьшается от 100% до 84%), благодаря использованию проверки достоверности с выровненным кодом. Если вместо этого используют мгновенные коды, достоверность дополнительно улучшается (84%) и с большей доступностью (90%). При использовании известной модели передачи данных GPS типа Клобучара вместо коррекций из ионосферной модели в реальном масштабе времени, соответствующей способу настоящего изобретения, имеет место существенное ухудшение результатов, сопровождающееся почти полным отсутствием доступности.
Доступные наборы данных для только что описанного эксперимента, несмотря на их пригодность для получения мгновенного разрешения неопределенности, тем не менее были очень ограничены в определении мгновенного положения. На самом деле, для этого эксперимента было доступно только четыре искусственных спутника в виду в течение 20 минут данных, так что мгновенное навигационное решение для мобильного аппарата SUR приходилось вычислять при использовании набора "Р5-М0" данных без многолучевых распространений и с очень высоко доступным отношением сигнал-шум для того, чтобы использовать для навигации минимальное число из четырех искусственных спутников. Кроме того, была исключена тропосферная задержка, вычисление которой потребовало бы, по меньшей мере, пятого искусственного спутника. Кроме того, первый интервал от приблизительно 7200 секунд до 7500 секунд был пропущен в определении позиционирования относительно определенных конфигураций отсечки фазы несущей частоты, потенциально вследствие проблем измерения в приемнике в течение этого периода. С другой стороны, с точки зрения ионосферных коррекций и соответствующей доли успешных попыток разрешения неопределенности полученные результаты практически аналогичны результатам, полученным для набора "Р5-М0" данных (смотри ТАБЛИЦУ III).
Эти ограничения имеют место вследствие использования наборов данных, передаваемых существующими системами, которые были подвергнуты только минимальному числу адаптации. При более реалистичном наборе данных, например, передаваемом шестью или более искусственными спутниками, исчезнут эти важные ограничения, накладываемые на определение позиционирования. На самом деле, будет можно получать более хорошую геометрию (геометрический фактор снижения точности), а также возможность обнаруживать и отфильтровывать искусственные спутники, имеющие ошибки неопределенности. Это даст возможность использования навигационного фильтра или автономных алгоритмов контроля приемника.
Результаты, соответствующие четырем искусственным спутникам, содержащиеся в наборе Р5-М0 данных, показаны на фиг.7A-7D, которые иллюстрируют остаточные погрешности для регулировки (фиг.7А), а также восточную (фиг.7В), северную (фиг.7С) и вертикальную (фиг.7D) составляющие ошибки мгновенного позиционирования после реализации способа, соответствующего настоящему изобретению, для мобильного аппарата SUR, находящегося приблизительно в 129 километрах от опорной станции REF. Ординаты графиков указаны в метрах, а абсциссы (задержки) - в секундах.
Для сравнения на фиг.8A-8D представлены соответствующие данные, но для реальных неопределенностей.
Основной характеристикой остаточных погрешностей перед регулировкой ▿ΔLc (фиг.7А) являются ошибки приблизительно 10 см, связанные с ошибкой первого цикла в L1 (приблизительно 8%: смотри ТАБЛИЦУ III), которые генерируют ошибки навигации, подобные скачкам. Они также представлены на фиг. 7B-7D. Они усиливаются соответствующим геометрическим фактором снижения точности. Эти некорректные оценки неопределенности L1, как правило, оказывают влияние на одну двойную разность из каждых трех, которые доступны на период дискретизации (минимальное число для определения позиционирования), так что эта ошибка влияет на позиционирование три раза (приблизительно 24% периода дискретизации, с 76% ошибок в трех измерениях менее 5 см и 100% менее 21 см). Хотя распределение ошибок не является гауссовым, результирующими эффективными трехмерными среднеквадратическими значениями являются 7 см, 3,5 см и 2 см для восточной, северной и вертикальной составляющих соответственно.
Для краткого изложения этих результатов среднеквадратические ошибки 1,1 и 2 см получены для восточной, северной и вертикальной составляющих соответственно, если неопределенность разрешена корректно (приблизительно 92% испытаний и 77% периодов дискретизации), а среднеквадратические ошибки 3,5 и 3 см имеют место для восточной, северной и вертикальной составляющих, соответственно, при включении периодов дискретизации с некорректным разрешением неопределенности.
Кроме того, замеры, уменьшенные посредством остаточных вычислений, перед регулировкой, двойной разности фазы несущей частоты и ошибок мгновенной навигации, представлены на фиг.8A-8D. Можно отметить значительное усиление шума фазы несущей частоты, особенно в вертикальной составляющей, создающее ошибку приблизительно 5 см. Эта траектория (с трехмерным среднеквадратическим значением 3 см, 1,1 см и 2 см для северной, восточной и вертикальной составляющих, и уровнями 95% при приблизительно 2,2 и 4 см, соответственно) очень четко представляет решение, которое может быть получено при использовании фильтра в реальном масштабе времени вместо мгновенного решения после корректного разрешения неопределенностей в течение первичных периодов дискретизации.
Для характеризации влияния времени запаздывания в ионосферной коррекции (вследствие, например, потенциальных проблем в связи) задержки 1-30 секунд (30 периодов дискретизации) рассматривались для вычислений ионосферных коррекций в сети стационарных станций спутниковой связи. Для каждой из этих задержек долю успешных попыток для "ddSTEC" (в TECU) вычисляли так, чтобы получить абсолютную точность 0,26 TECU для мобильного аппарата на расстоянии 129 километров. Эта доля показана на фиг.9 в функции от времени запаздывания (в секундах). Довольно очевидно, что влияние времени запаздывания пренебрежимо мало до 30 секунд при доле успешных попыток более 90%, достигаемых для всех времен запаздывания.
На фиг.10 рассматриваются более продолжительные времена запаздывания, в этом случае для опорной сети и коррекций мобильного аппарата одновременно, так что ионосферные острые точки остаются близко друг к другу. Ясно, что через 5 минут доля успешных попыток уменьшается от 90% до 85%. Через 10 минут доля успешных попыток резко падает дополнительно, достигая 75%. Эти значения могут падать более резко в тех случаях, в которых выше изменение дифференциальной ионосферной задержки.
Очевидно, что при средней долготе время запаздывания не создает важной проблемы для способа, соответствующего настоящему изобретению, который может поддерживать типовые времена запаздывания до приблизительно 5 минут.
Из приведенного описания следует, что настоящее изобретение решает поставленные задачи.
Способ, соответствующий настоящему изобретению, делает возможным, благодаря применению ионосферных коррекций в реальном масштабе времени при использовании томографической модели, сопровождаемому минимальным числом геодезических вычислений, получение полного мгновенного разрешения неопределенности. Он также обеспечивает возможность навигации с точностью порядка одного сантиметра на расстояниях более 100 километров от опорных станций спутниковой связи.
Предпочтительным применением настоящего изобретения будут в будущем спутниковые навигационные системы, например, система "GALLILEO" или система "Modernized GPS", которые реализуют передачу несущих частот в трех различных полосах частот.
В соответствии с основной характеристикой способа, соответствующего настоящему изобретению, эта способность мгновенной навигации с точностью, которая лучше одного дециметра, обеспечивается вследствие того, что способ разрешения неопределенности фазы трех несущий частот типа "TCAR", который не является очень сложным, комбинируется с определением ионосферной модели в реальном масштабе времени для создания возможности применения ионосферных коррекций.
Примеры экспериментов, описанные в приведенном описании, показывают значительное улучшение результатов, получаемых с помощью способов, соответствующих предшествующему уровню техники, при эквивалентных условиях:
мгновенная доля успешных попыток приблизительно 60% или менее увеличивается до приблизительно 90% на расстояниях более 100 километров от ближайшей стационарной наземной опорной станции спутниковой связи и в условиях, в которых трудно получить ионосферную модель (в полдень в период максимальной солнечной активности);
высокая эффективность сохраняется со временами запаздывания приблизительно 5 минут в ионосферных коррекциях;
соответствующая навигация, несмотря на ограниченное число доступных искусственных спутников, для экспериментальных условий, поддерживаемых, например, в наборах данных, может быть достигнута мгновенно в режиме "одного периода дискретизации" и делает возможным получение трехмерных среднеквадратических значений 3,5 и 2 сантиметров для восточной, северной и вертикальной составляющих соответственно;
в предпочтительном варианте осуществления проверка достоверности неопределенности в реальном масштабе времени делает возможным улучшение эксплуатационных показателей постольку, поскольку в способе предусматривается простое уменьшение многолучевого распространения псевдодальности; и
эти хорошие эксплуатационные характеристики были также подтверждены в трудных условиях:
при низкой долготе (35 градусов вместо 48 градусов) с более высокими ионосферными значениями;
в экстремальных условиях по отношению к тропическим станциям ниже "Северной экваториальной аномалии" ионосферы, где, как правило, создаются самые высокие градиенты. В последнем случае пользователю необходимо обеспечить питание своего собственного ионосферного фильтра и комбинирование его с коррекциями из опорных сетей и свои собственные ионосферные замеры;
при высокой динамике, делающей возможным обеспечение точных ионосферных коррекций, поддающихся использованию самолетами в полете приблизительно в 140 километрах от ближайшей опорной станции спутниковой связи.
Однако должно быть очевидным, что настоящее изобретение не ограничено только примерами вариантов осуществления, описанными для иллюстрации настоящего изобретения, в частности, в связи с фиг.1-8.
Наконец, числовые примеры были приведены только в качестве иллюстрации, а не для какого-либо ограничения объема настоящего изобретения. Они происходят из простого технологического выбора в пределах возможности квалифицированного специалиста в этой области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОТРЕБИТЕЛЯ В СИСТЕМАХ ГЛОНАСС/GPS И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2486544C2 |
| ЗАВИСЯЩЕЕ ОТ РАССТОЯНИЯ УМЕНЬШЕНИЕ ОШИБКИ ПРИ ОПРЕДЕЛЕНИИ МЕСТОПОЛОЖЕНИЯ В РЕЖИМЕ КИНЕМАТИКИ РЕАЛЬНОГО ВРЕМЕНИ | 2008 |
|
RU2479855C2 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНИВАНИЯ ПОЛОЖЕНИЯ С КОМПЕНСАЦИЕЙ СМЕЩЕНИЯ | 2011 |
|
RU2567501C2 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЕЙ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ РАЗМЕТКИ УЧАСТКОВ УЛИЧНО-ДОРОЖНОЙ СЕТИ | 2016 |
|
RU2633093C1 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ОБЪЕКТА, ИМЕЮЩЕГО ПРИЕМНИК ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ, ПОСРЕДСТВОМ ОБРАБОТКИ НЕРАЗНОСТНЫХ ДАННЫХ, ПОДОБНЫХ ИЗМЕРЕНИЯМ ФАЗЫ НЕСУЩЕЙ, И ВНЕШНИХ ДАННЫХ, ПОДОБНЫХ ИОНОСФЕРНЫМ ДАННЫМ | 2011 |
|
RU2565386C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ТРЕХ ЧАСТОТ GPS ДЛЯ РАЗРЕШЕНИЯ ЦЕЛОЧИСЛЕННЫХ НЕОДНОЗНАЧНОСТЕЙ ФАЗЫ НЕСУЩЕЙ | 2004 |
|
RU2354991C2 |


Изобретение относится к навигации в реальном масштабе времени для определения местоположения мобильного аппарата. Используются радиосигналы трех разных несущих частот, передаваемые искусственными спутниками. Способ предусматривает этап определения неопределенности фазы несущей частоты "особо широкой фазовой дорожки", этап оценки неопределенности фазы "широкой фазовой дорожки" и этап разрешения неопределенности фазы одной из частот. Дополнительный этап заключается в применении ионосферных коррекций в реальном масштабе времени в течение третьего этапа, причем эти ионосферные коррекции основаны на непрерывно обновляемой ионосферной модели указанного ионосферного слоя, вычисляемой стационарной наземной опорной станцией, комбинируемой с геодезическими данными, вычисляемыми так называемой ведущей стационарной наземной опорной станцией. Технический результат заключается в обеспечении возможности точной навигации на расстояниях более 100 километров от опорных станций спутниковой связи. 2 н. и 7 з.п. ф-лы, 17 ил., 6 табл.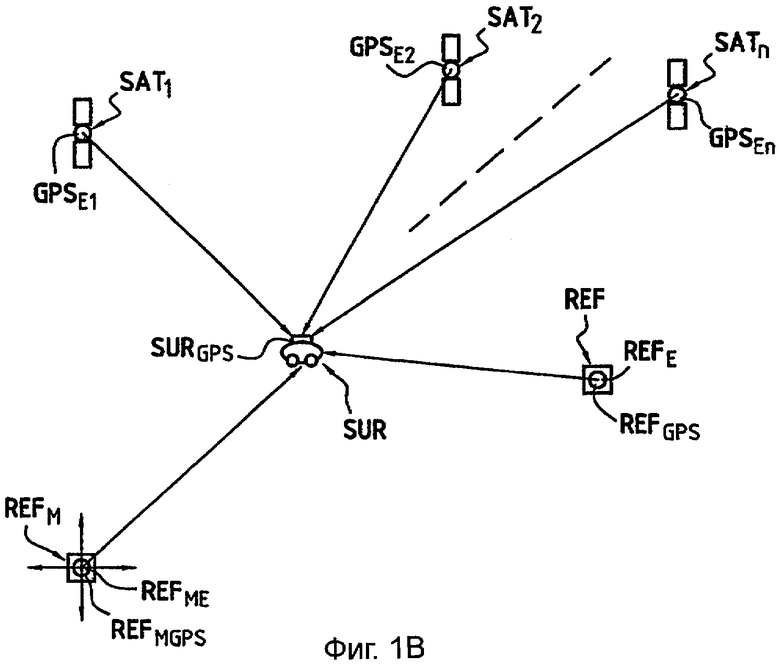
первый этап, заключающийся в определении в указанном мобильном аппарате (SUR), так называемой, неопределенности "особо широкой фазовой дорожки", представляющей собой разность фаз в циклах между указанной третьей и указанной второй несущими частотами из комбинации псевдодальностей, при использовании одного кодового значения;
второй этап, заключающийся в оценке в указанном мобильном аппарате (SUR), так называемой, неопределенности "широкой фазовой дорожки", представляющей собой разность фаз циклах между указанной первой и указанной второй несущими частотами, из указанной неопределенности "особо широкой фазовой дорожки", определенной во время указанного первого этапа;
третий этап, заключающийся, в указанном мобильном аппарате (SUR), в разрешении неопределенности одной из указанных частот из указанной неопределенности "широкой фазовой дорожки", оцененной во время указанного второго этапа; и
дополнительный этап для применения в реальном масштабе времени ионосферных коррекций в течение указанного третьего этапа, причем указанные ионосферные коррекции основаны на непрерывно обновляемой в реальном масштабе времени ионосферной модели указанного слоя (CION).
| US 5805108 A, 08.09.1998 | |||
| СПОСОБ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ФАЗОВЫХ ИЗМЕРЕНИЙ | 1999 |
|
RU2157547C1 |
| US 6356232 B1, 12.03.2002 | |||
| СОУС ТОМАТНЫЙ ДЛЯ ДЕТСКОГО ПИТАНИЯ | 1999 |
|
RU2168920C2 |

