Изобретение относится к устройству сердечно-легочной реанимации человека, позволяющему контролировать состояние пациента. Область применения охватывает отрасли медицины, где могут проводиться реанимационные мероприятия в ходе лечения человека.
Известны и широко применяются различные способы и устройства контроля сердечно-легочной реанимации человека [1, 2, 3].
Существенным признаком этих способов и устройств является то, что имеется регистратор, анализатор и индикатор дыхательных шумов.
Недостатки известных технических решений в низкой точности работы (регистрируются только дыхательные шумы) и сложности использования устройств (большие габариты и вес, сложность или невозможность размещения на пациенте); кроме этого известные устройства не могут контролировать размер зрачка пациента и анализировать состав выдыхаемого газа.
В качестве прототипа выбрано устройство для сердечно-легочной реанимации [4]. Это известное устройство содержит блок электродов и ультразвуковой преобразователь, размещаемые на пациенте с помощью блока крепления, а также интерфейс и процессор, измеряющие сосудистый кровоток на основе доплеровского метода и управляющие работой датчика.
Недостатки указанного устройства заключается в отсутствии следующих необходимых возможностей:
- автоматический анализ выдыхаемого газа;
- звуковое инструктирование реанимирующего лица при проведении сердечно-легочной реанимации (СЛР);
- контроль эффективности непрямого массажа сердца и искусственного дыхания;
- автоматическое принятие решений о состоянии пациента;
- оперативное световое извещение о состоянии пациента;
- низкое быстродействие и точность оценки состояния пациента;
- мобильность (переносимость, компактность);
- связь с сетью интернет;
- бесперебойность питания.
Таким образом, очевидно, что существует потребность в усовершенствовании способов, устройств и систем, обеспечивающих быстрый и качественный контроль сердечно-легочной реанимации.
Цель изобретения (технический результат) - увеличение функциональных возможностей, быстродействия, оперативности, точности устройств, контролируемости СЛР и безопасности СЛР.
Поставленная цель достигается тем, что устройство для контроля сердечно-легочной реанимации, содержащее ультразвуковой преобразователь, блок электродов, подключенные через интерфейс к процессору, связанному с дисплеем, блоком памяти, звуковым сигнализатором, блоком светодиодных сигнализаторов, блоком связи с центральным пультом управления, блоком выбора режима работы, блоком связи с Интернет и, через USB-интерфейс, с блоком программного обеспечения верхнего уровня, цветную телевизионную микрокамеру, подключенную через последовательно установленные блок усиления и фильтрации сигнала и блок обработки и совмещения изображений к дополнительному входу/выходу процессора, блок подсветки, блок измерения пульса, газоанализатор, блок микрофонов с блоком согласования, подключенные к процессору и блок питания, при этом блок измерения пульса и блок электродов выполнены с возможностью закрепления на пациенте посредством блока крепления, а блок микрофонов, управляемый блок подсветки и газоанализатор выполнены с возможностью закрепления на пациенте посредством дополнительного блока крепления.
Кроме того, блок микрофонов включает не менее шести микрофонов и размещается в области гортани и в проекции бифрукации сонных артерий пациента.
Кроме того, что газоанализатор выполнен в виде полумаски.
Кроме того, блок выбора режима является клавиатурой.
Кроме того, блок памяти является флэш-накопителем данных.
Кроме того, блок связи с центральным пультом управления выполнен в виде приемопередатчика.
Кроме того, блоком связи с Интернет является сетевым адаптером.
Кроме того, блок питания содержит аккумулятор и солнечную батарею.
Способ контроля сердечно-легочной реанимации с использованием вышеописанного устройства, включающий получение ультразвуковых эхосигналов и электросигналов, характеризующих кровоток в кровеносном сосуде, определение характеристики кровотока по импедансу тканей шеи во время проведения сердечно-легочной реанимации, отображение звуковой и визуальной информации о состоянии пациента, далее формируют текущую информацию о состоянии пациента, для чего снимают цветные телевизионные изображения и определяют геометрические и цветные характеристики зрачка и радужной оболочки глаза, оценивая цвет и геометрические характеристики кровеносных сосудов, снимают и анализируют звуковые гортанные сигналы, снимают и анализируют выдыхаемый газ и пульс пациента, сигнализируют световыми сигналами о состоянии пациента и оценивают состояние пациента на основании данных сравнения эталонной и текущей информации.
Кроме того, анализ цветных телевизионных изображений осуществляется при совмещении текущего и эталонного изображений по масштабу, цвету, выделении информативных признаков в виде контуров линий, точек, постоянно-наблюдаемых и изменяющихся частей, цвета и яркости.
Кроме того, при анализе геометрических характеристик зрачка определяется диаметр зрачка.
Кроме того, глаз пациента освещается управляемой цветной подсветкой.
Кроме того, при анализе выдыхаемого газа определяется его химический состав.
Кроме того, анализ звуковых сигналов осуществляется на частотах 20-180 и 260-680 Гц.
Кроме того, анализ импеданса тканей шеи осуществляется путем оценки таких его характеристик, как емкость, сопротивление и их отношение. Кроме того, измеряется амплитуда и частота пульса.
Способ и устройство поясняется следующими схемами и рисунками:
Фиг 1. Структурная схема устройства.
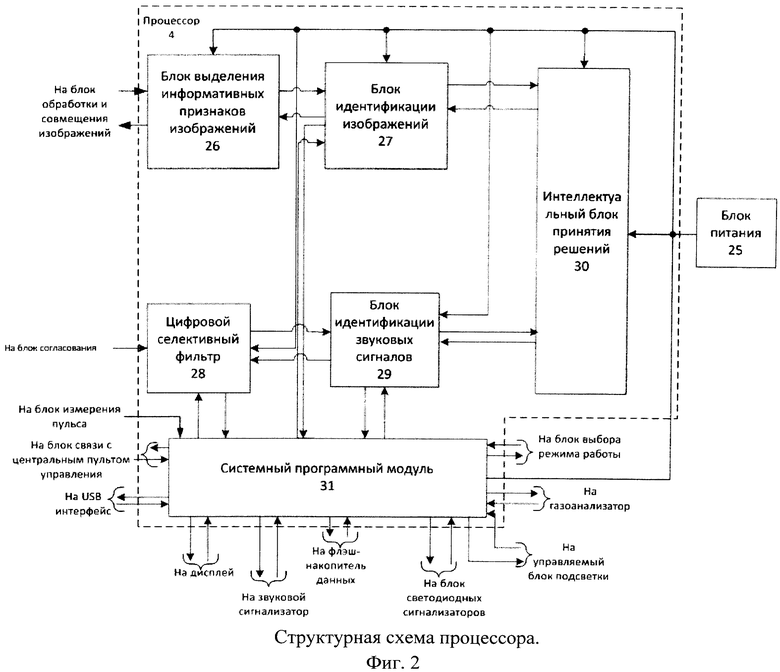
Фиг 2. Структурная схема процессора.
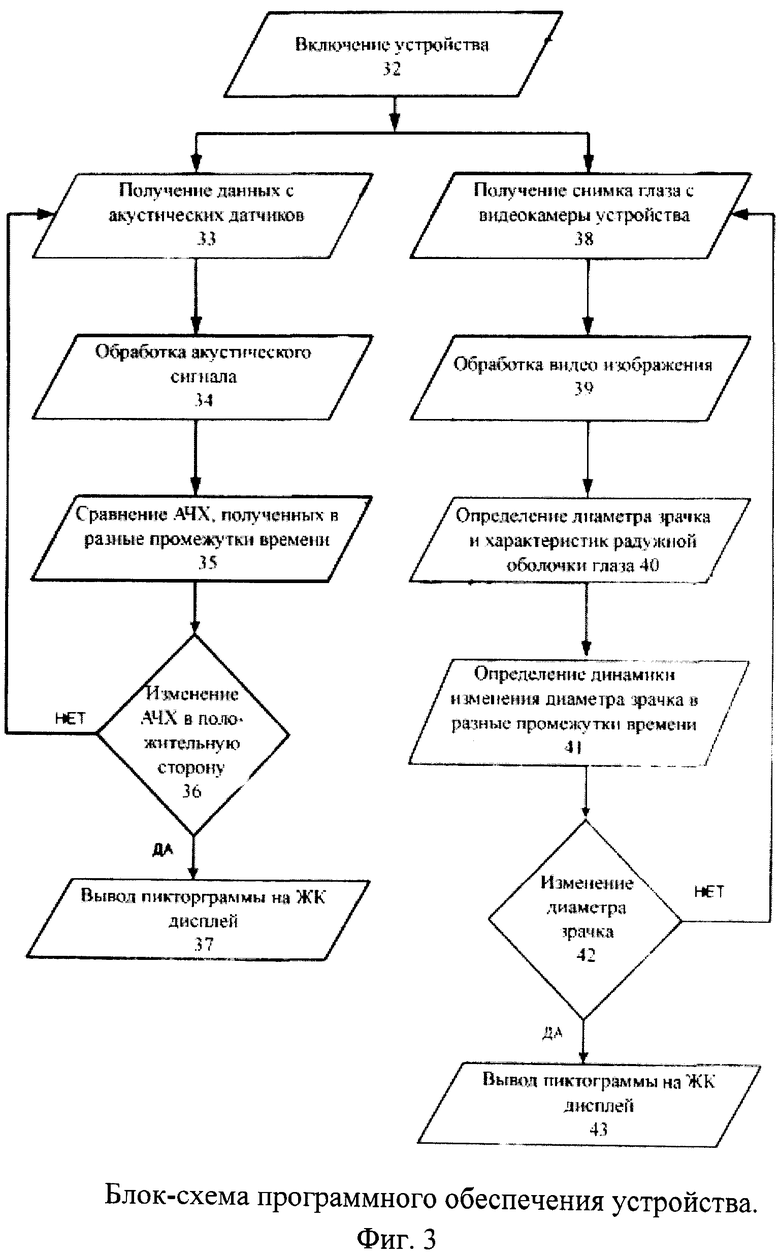
Фиг 3. Блок-схема программного обеспечения устройства.
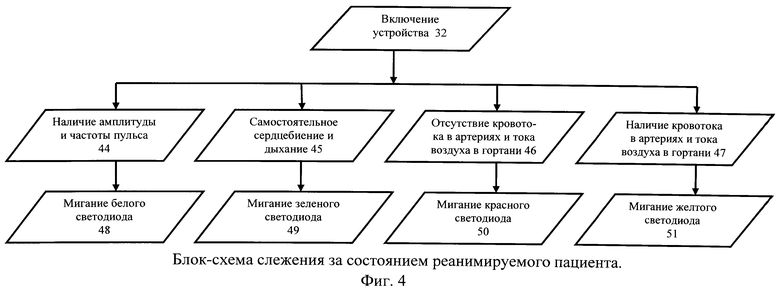
Фиг 4. Блок-схема слежения за состоянием реанимируемого пациента.
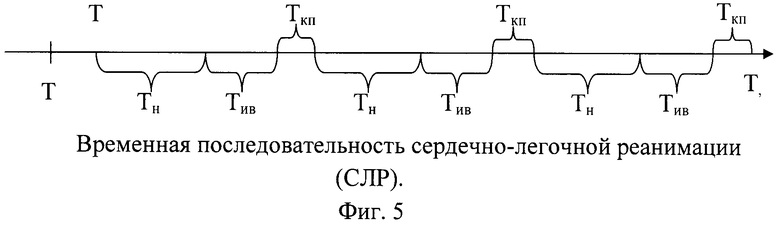
Фиг 5. Временная последовательность сердечно-легочной реанимации (СЛР).
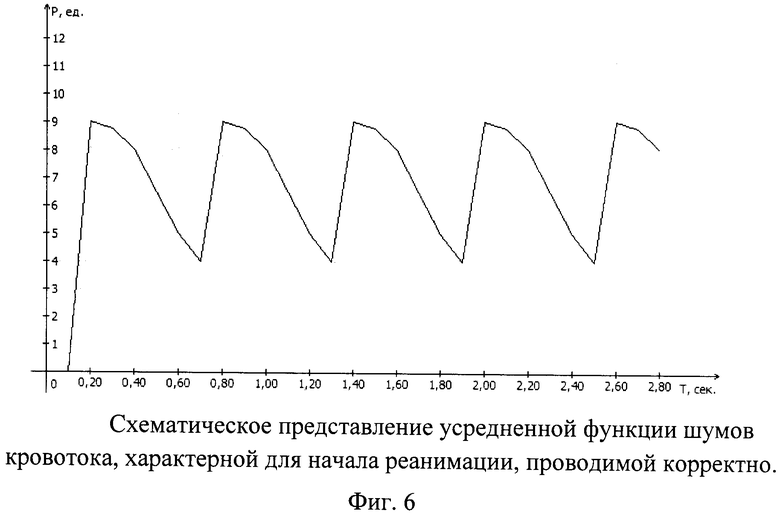
Фиг 6. Схематическое представление усредненной функции шумов кровотока, характерной для начала реанимации, проводимой корректно.
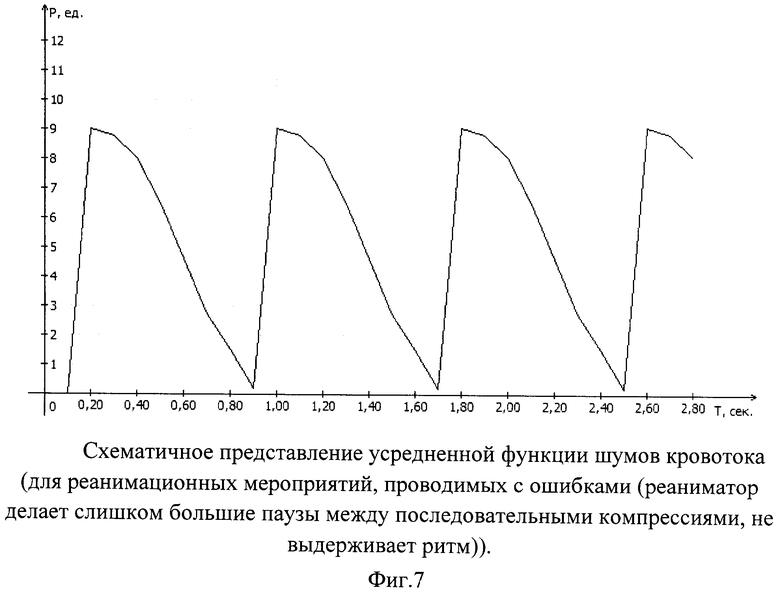
Фиг 7. Схематичное представление усредненной функции шумов кровотока (для реанимационных мероприятий, проводимых с ошибками (реаниматор делает слишком большие паузы между последовательными компрессиями, не выдерживает ритм)).
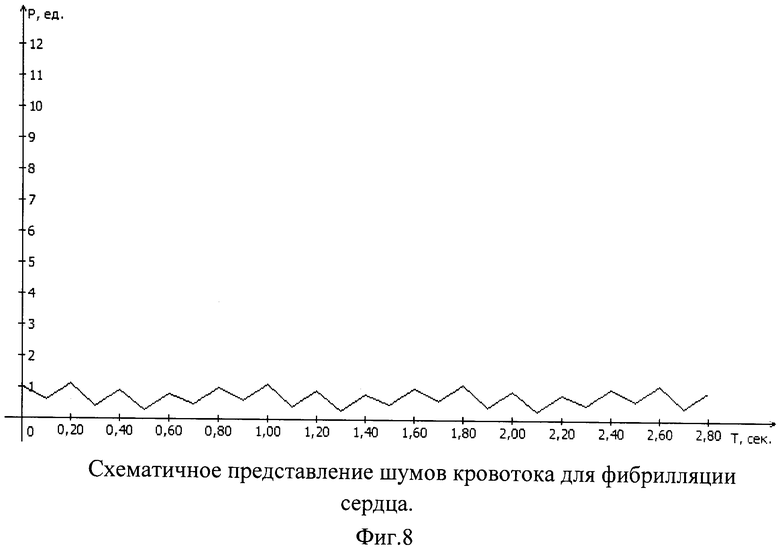
Фиг 8. Схематическое представление шумов кровотока при фибрилляции сердца.
Фиг 9. Изображение глаза, плоскость которого ортогональна направлению камеры.
Фиг 10. Изображение глаза, плоскость которого находится под углом к направлению камеры.
На фиг. 1 приведена структурная схема устройства.
На фиг. 1 даны следующие обозначения:
1 - объект (пациент);
2 - ультразвуковой преобразователь;
3 - интерфейс;
4 - процессор;
5 - блок электродов;
6 - блок крепления;
7 - блок микрофонов;
8 - блок согласования;
9 - дополнительный блок крепления;
10 - управляемый блок подсветки;
11 - газоанализатор;
12 - цветная телевизионная камера;
13 - блок усиления и фильтрации сигнала;
14 - блок обработки и совмещения изображений;
15 - дисплей;
16 - звуковой сигнализатор;
17 - Флэш-накопитель данных;
18 - блок светодиодных сигнализаторов;
19 - блок выбора режима;
20 - USB интерфейс;
21 - блок программного обеспечения верхнего уровня;
22 - блок связи с системой интернет;
23 - блок связи с центральным пультом управления;
24 - блок измерения пульса;
25 - универсальный блок питания.
На фиг. показаны следующие связи:
Функционирование способа рассмотрим на примере работы устройства (фиг. 1).
Устройство функционирует следующим образом. На объекте (пациенте) 1 размещаются и закрепляются блок электродов 9, блок микрофонов 7, блок измерения пульса 24, управляемый блок подсветки 10, газоанализатор 11 и цветная телевизионная микрокамера 12. При этом блок микрофонов 7, управляемый блок подсветки 10 и газоанализатор 11 закрепляются на пациенте с помощью дополнительного блока крепления 9, а блок измерения пульса 24 и блок электродов 5 закрепляются на пациенте 1 с помощью блока крепления 6. С помощью блока микрофонов 7 снимаются шумы в сосудах (в местах бифуркации сонных артерий или шумов прохождения воздуха по дыхательным путям), а с помощью газоанализатора 11 анализируется выдыхаемый (выделяемый) газ объектом (пациентом) 1. Блоком измерения пульса 24 снимаются сигналы, пропорциональные амплитуде и частоте пульса объекта (пациента) 1. Сигналы с газоанализатора 11, блока измерения пульса 24 поступают для дальнейшей обработки в процессор 4, куда также поступает сигнал от блока согласования 8, подключенного к блоку микрофонов 7. Цветная телевизионная камера 12 снимает цветное телевизионное изображение глаза (зрачка и радужной оболочки глаза) объекта (пациента) 1. Для создания равномерного и качественного освещения глаза объекта (пациента) 1 используется управляемый блок подсветки 10, который управляется от процессора 4. Управляемый блок подсветки 10 формирует постоянное освещение или переменное освещение (по кольцу - окружности) глаза. Сигналы с цветной телевизионной камеры 12 усиливаются, обрабатываются и передаются блоком усиления и фильтрации сигнала 13 на блок обработки и совмещения изображений 14, обеспечивающий выделение информативных признаков изображений (формирование контуров, точек, сегментов) и совмещение сравниваемых изображений по углам крена, тангажа, по масштабу и относительного разворота в плоскости считывания изображений глаза цветной телевизионной камерой 12. Сигналы с блока обработки и совмещения изображений 14 поступают на процессор 4. С помощью ультразвукового преобразователя 2 и блока электродов 5 формируются и считываются сигналы электрокардиограммы (ЭКГ) объекта (пациента) 1, которые передаются через интерфейс 3 в процессор 4, осуществляющий анализ объекта (пациента) 1. Блоком программного обеспечения верхнего уровня 21 через USB-интерфейс 20 производится запись программы работы процессора 4. Выбор режима работы процессора 4 осуществляется блоком выбора режима работы 19 (например, клавиатуры). Информация о состоянии объекта (пациента) 1 сигнализируется светом (блоком светодиодных сигнализаторов 18) и звуком (звуковым сигнализатором 16). Вся необходимая информация с процессора 4 передается в Интернет через блок связи с системой интернет 21. Кроме этого информация о состоянии объекта (пациента) 1 отображается на дисплее 15 и передается через блок связи с центральным пультом управления 23 на центральный пульт управления. Эталонная информация (эталонные изображения, эталонные шумовые и звуковые сигналы (ЭКГ, сигналы бифуркации в сонных артериях, сигналы прохождения воздуха в дыхательных путях, амплитуда и частота пульса, состав выдыхаемого (выделяемого) воздуха) записывается в блок памяти 17 и используется затем в функционировании устройства. Для осуществления бесперебойного питания используется универсальный блок питания 25, состоящий из аккумулятора и солнечной батареи. На этом один цикл работы устройства заканчивается.
На фиг. 2 приведена структурная схема процессора 4.
На фиг. 2 даны следующие обозначения:
26 - блок выделения информативных признаков изображений;
27 - блок идентификации изображений;
28 - цифровой селективный фильтр;
29 - блок идентификации звуковых сигналов;
30 - интеллектуальный блок принятия решений;
31- системный программный модуль.
Процессор 4 функционирует следующим образом. Обработка и распознавание изображений осуществляется блоком выделения информативных признаков изображений 26 и блоком идентификации изображений 27. Распознавание звуковых сигналов и ЭКГ обеспечивается блоком идентификации звуковых сигналов 29, использующим предварительную обработку сигналов цифровым селективным фильтром 28. Связь с внешними блоками процессора 4 производится через системный программный модуль 31, который может перепрограммироваться.
Назначение и описание внешних составных блоков:
1) Flash накопитель данных - съемный носитель информации MicroSDFlash объемом 4 Гб. Для хранения и обеспечение доступа к архивным данным сканируемых изображений радужной оболочки глаза и обработанного звука.
2) Цветная телевизионная микрокамера (CCD сенсор - CAM8000-U Module) - дочерний модуль цифровой камеры 1,3 Мпикс и частотой кадров до 20 fps, интерфейс USB 2.0, размеры 30×50 мм. Предназначена для сканирования изображения в цветном формате с разрешающей способностью не менее 720 строк *576 столбцов, с последующей передачей данных в цифровом виде в микропроцессор 4.
3) Автоматическая регулировка усиления необходима для предварительной обработки сигнала с CCD сенсора и компенсации сигнала при кратковременном или внештатном пропадании фоновой подсветки сканируемого изображения.
4) Кнопочный переключатель - двухпозиционный переключатель, необходим для выбора режима работы прибора в зависимости от количества людей, проводящих реанимационные мероприятия (1 или 2 спасателя).
5) Подсветка сканируемого изображения - светодиод белого свечения, применяется для подсветки участка глаза и проверки зрачкового рефлекса уреанимируемого для оценки адекватности оказания реанимационного пособия.
6) Микрофон (6 каналов) - шумозащищенный микрофон WM155A103 с диапазоном частот 20-16000 Гц, чувствительность 58 дБ. 2 канала в области гортани(2 микрофона), 2 в области бифуркаций сонных артерий (2 микрофона). Размеры не более 9.7*5 мм.
7) Буферное согласование и усиление сигнала предназначено для согласования и усиления сигналов звуковой частоты микрофонов.
8) USB интерфейс используется для связи устройства со специальным программным обеспечением верхнего уровня. Обеспечивает скоростной обмен данными (операции чтения/записи) в соответствии со спецификацией USB 2.0.
9) Звуковые и светодиодные сигнализаторы событий - светодиоды (белого, красного, зеленого и желтого) свечения и миниатюрный динамик, предназначенные для реализации интерфейса пользователя с возможностью своевременного светового и звукового оповещения о работе прибора, о рекомендуемых манипуляциях в ходе проведения реанимационных мероприятий и непосредственно о состоянии пациента.
10) Устройство отображения информации - двухстрочный ЖК дисплей, размеры 50.6×31 мм, предназначен для реализации интерфейса пользователя с возможностью своевременных рекомендуемых манипуляций в ходе проведения реанимационных мероприятий и информации о состоянии пациента.
11) Блок питания - источник автономного питания (зарядное устройство) - литиевый аккумулятор Li-ion3,7B 1020 mAH. Выбор аккумулятора произведен с расчетом непрерывной работы прибора в течение 1 часа без подзарядки, что отвечает требованиям о рекомендуемом времени проведения реанимационных мероприятий 30 минут. Дополнительно укомплектовывается унифицированным преобразовательным блоком переменного в постоянное напряжение 5 В, током 350 мА, частотой 50-60 Гц, который предназначен для работы и заряда внутреннего аккумуляторного источника питания от сети переменного тока напряжением 220 В. Дополнительно снабжается солнечной батареей. Кроме этого блок питания адаптируется для работы от питания ботовой сети автомобиля.
На фиг. 3 дана блок-схема программного обеспечения устройства, которое включает следующие операции:
32 - включение устройства;
33 - получение данных с акустических датчиков;
34 - обработка акустических сигналов;
35 - сравнение АЧХ, полученных в разные промежутки времени;
36 - изменение АЧХ в положительную сторону;
37 - вывод программы на ЖК-дисплей;
38 - получение снимка глаза с видеокамеры на устройство;
39 - обработка видеоизображения;
40 - определение диаметра зрачка и характеристик радужной оболочки глаза;
41 - определение динамики изменения диаметра зрачка в разные промежутки времени;
42 - изменение диаметра зрачка;
43 - вывод пиктограммы на ЖК-дисплей.
На фиг. 4 представлена блок-схема слежения за состоянием реанимируемого пациента. Блок-схема включает следующие операции:
32 - включение устройства;
44 - наличие амплитуды и частоты пульса;
45 - самостоятельное сердцебиение и дыхание;
46 - отсутствие кровотока в артериях и тока воздуха в гортани;
47 - наличие кровотока в артериях и тока воздуха в гортани;
48 - мигание белого светодиода;
49 - мигание зеленого светодиода;
50 - мигания красного светодиода;
51 - мигание желтого светодиода.
Программное обеспечение устройства
Программное обеспечение устройства выполняет анализ данных, получаемых с датчиков (акустические датчики, датчики биоимпеданса, видеокамера), прикрепляемых в определенных областях тела пациента при фиксации устройства. Блок-схема программного обеспечения представлена на рисунке 3.
Акустические датчики необходимы для отслеживания, шумов в зоне гортани и бифуркации сонных артерий в ходе проведения реанимационных мероприятий, а также измерения характеристик пульса. Сигнал, получаемый с датчиков, анализируется программным обеспечением микроконтроллера устройства, производится вычисление и сравнение амплитудно-частотной характеристики (АЧХ) в разные временные периоды и, в результате появления положительной динамики (появление сосудистых шумов в местах бифуркации сонных артерий или шумов прохождения воздуха по дыхательным путям, их увеличение, а также появление пульса), программное обеспечение выводит на ЖК-дисплей устройства соответствующую пиктограмму.
С помощью видеокамеры в реальном времени формируются изображения глазного яблока реанимируемого пациента. При помощи алгоритмов бинаризации и распознавания образов измеряется диаметр зрачка пациента и, в случае положительной динамики, выводится на ЖК-дисплей устройства пиктограмма, характеристики которой свидетельствуют о том, что появилась положительная динамика диаметра зрачка реанимируемого пациента (произошло сужение зрачка). Алгоритм слежения за состоянием реанимируемого пациента показан на рисунке 4.
Также программное обеспечение микроконтроллера устройства осуществляет функцию индикации состояния реанимируемого пациента во время проведения процедуры СЛР:
1. Если фиксируется стабильное прохождение тока воздуха по гортани и тока крови по сонным артериям, то на светодиодной группе устройства будет мигать зеленый светодиод.
2. Если фиксируется либо прохождение только тока воздуха по гортани, либо только прохождение тока крови по сонным артериям, то на светодиодной панели будет мигать желтый светодиод.
3. Если фиксируется полное отсутствие и тока крови по сонным артериям и тока воздуха по гортани, то на светодиодной панели будет мигать красный светодиод.
4. Если фиксируется наличие пульса у пациента, то на светодиодной панели будет мигать белый светодиод.
Также, программное обеспечение микроконтроллера устройства обеспечивает контроль хода реанимационных мероприятий:
1. Красный светодиод задает ритм выполнения компрессий грудной клетки для непрямого массажа грудной клетки (например, 100 компрессий в минуту).
2. Синий дает сигнал к началу процедуры искусственной вентиляции легких ИВЛ (например, 1 сигнал на 20 компрессий).
3. Желтый указывает на паузу во время СЛР, необходимую для контроля самостоятельного сердцебиения и дыхания.
4. Белый сигнализирует о наличии пульса у пациента.
Рассмотрим общий способ контроля шумов кровотока, реализуемый в настоящем изобретении. Перед началом сердечно-легочной реанимации (СЛР), кровоток в сонных артериях либо отсутствует, либо очень слаб, а следовательно, уровень шумов кровотока отсутствует или низкий.
Обозначим начальный уровень шумов N0 кровотока. Во время СЛР устройство фиксирует значения шумов Ni. Если значения Ni больше N0, СЛР имела положительный эффект. По отношению величин Ni, к Ni-1, а также к N0 определяется динамика шумов кровотока, по которой восстанавливается наличие и динамика кровотока в сонных артериях.
Процесс реанимации человека можно представить в виде последовательности (см. фиг. 5):
1) Т0 - момент времени, в который реанимирующий персонал зафиксировал устройство на пациенте;
2) Тр - время фактического начала реанимационных мероприятий;
3) Тслр временной интервал мероприятий СЛР, состоящий из двух последовательных интервалов Тнмс и Тивл;
4) Ткп - временной интервал контрольной паузы СЛР.
За временной промежуток (Т0, Тр) персонал еще не успевает начать СЛР, однако устройство уже собирает информацию о шумах кровотока, которая в дальнейшем будет считаться точкой отсчета.
Начиная с момента времени Тр, персонал проводит непрямой массаж сердца (мероприятия СЛР) в течение интервала времени Тнмс. За это время устройство с определенной частотой получает информацию о шумах кровотока. Исходя из самого процесса СЛР, очевидно, что уровень шумов должен быть значительно выше точки отсчета и иметь псевдо-ритмичный характер.
По истечению временного интервала Тнмс, персонал приступает к искусственной вентиляции легких, которую проводит в течение времени Тивл, а затем делает кратковременную контрольную паузу Ткп, чтобы оценить успешность мероприятий СЛР. Аналогично, устройство во время паузы определяет уровень самостоятельных шумов кровотока, которые, в случае успеха, должны значительно отличаться в большую сторону от уровня шумов точки отсчета.
В течение всего времени мероприятий СЛР устройство N раз в секунду получает информацию с 6 датчиков, фиксирующих уровень шумов кровотока. Обозначим полученные данные на i-том шаге измерений -ri=(Pi1, Pi2, Pi3, Pi4) Из полученных четырех значений с разных датчиков формируется три величины:
 - минимальное на i-том шаге;
- минимальное на i-том шаге;
 - максимальное на i-том шаге;
- максимальное на i-том шаге;
 - среднее на i-том шаге.
- среднее на i-том шаге.
Таким образом, в течение всего периода СЛР устройством формируется три дискретных функции: Pmin(t), Pmax(t), Pavg(t) динамика которых прямо
пропорциональна динамике кровотока в сонных артериях реанимируемого. Исходя из соотношения данных функций и их производных по времени, будет восстанавливаться функция динамики кровотока.
Рассмотрим схематические графики функции Pavg (t) возможных снимаемых показаний и ситуаций.
Устройство проводит, например, 10 измерений в секунду, следовательно, функции шумов кровотока имеют дискретный характер, с шагом абсциссы 100 миллисекунд. На фиг. 6 представлен схематически график усредненной функции шумов кровотока. На данном графике видно, что до момента времени 0,1 секунды реанимационные мероприятия еще не начались. Характерный вид функции отражает сам процесс проведения реанимационных мероприятий. Персоналу необходимо совершать непрямой массаж сердца в течение фиксированного времени с частотой 100 компрессий в 60 секунд. Следовательно, так как интервал между компрессиями 0,6 секунды, мы будем на графике наблюдать псевдо периодическую функцию, максимумы и минимумы которой появляются с определенным периодом.
Метод позволяет контролировать корректность проводимых реанимационных мероприятий. Для этого устройство сначала определит время начала реанимационных мероприятий, как время максимальной производной функции шумов кровотока (начало реанимационных мероприятий - самый первый и, как правило, самый резкий переход от отсутствующих шумов к максимальному уровню). Затем, определяя период появления максимумов и минимумов шумов кровотока, соответствующих началу компрессии грудной клетки реаниматором (данный период соответствует периоду появления локальных максимумов и минимумов функции кровотока и. максимумов ее производной), устройство определит темп проведения реанимационных мероприятий. Опираясь на отношение уровней локальных максимумов и минимумов к базовому уровню шумов (уровню шумов до начала реанимационных мероприятий), можно делать вывод также об эффективности непрямого массажа сердца.
На фиг. 7, 8 схематически изображены функции шумов кровотока, соответствующих корректным реанимационным мероприятиям и проводимым с ошибками. Очевидно, используя данный метод, устройству легко определить ситуации, когда СЛР проводится с ошибками. Например, зная правильный период и сравнивая его с периодом максимумов проводимой СЛР, устройство определит наличие ошибки и выведет на экран необходимые указания. Аналогично, если уровень компрессии грудной клетки недостаточен, устройство определит это и проинформирует персонал.
Чтобы сделать вывод об успешности мероприятий СЛР и определить, достигнута ли цель СЛР (восстановление самостоятельного сердцебиения и дыхания), проводящий мероприятия персонал приостанавливает СЛР на время контрольной паузы Ткп.
Устройство, определившее время начало мероприятий СЛР автоматически, заранее «знает» временной интервал мероприятий СЛР, и по его истечению оценивает успешность СЛР, на основе периода появления локальных максимумов и минимумов и соотношений уровней локальных максимумов и минимумов к уровням максимумов и минимумов во время СЛР, а также к базовому уровню шумов.
Возможно несколько принципиальных вариантов. В случае неуспешных мероприятий СЛР сердцебиение отсутствует или имеется фибрилляция сердца. В случае отсутствия сердцебиения, уровни локальных максимумов и минимумов будут значительно ниже таких уровней во время СЛР, а также будут практически неотличимы друг от друга, близкими к базовому уровню шумов до реанимации. В случае фибрилляции сердца, максимумы и минимумы будут различимыми и апериодическими, также близкими к базовому уровню шумов до реанимации. На фиг. 8 представлен схематический график шумов кровотока в случае фибрилляции.
В случае успешных мероприятий СЛР, когда сердцебиение восстановлено, способ позволяет определить сердечный ритм, так как локальные минимумы и максимумы явно выражены, период сердцебиений и их характер нетрудно вычислить.
Контроль тока воздуха в верхних дыхательных путях по анализу шумов дыхания в гортани
Метод позволяет определить, корректно ли проводится искусственная вентиляция легких, а также определить, восстановилось ли самостоятельное дыхание.
Рассмотрим общий принцип метода контроля тока воздуха. Перед началом сердечно-легочной реанимации (СЛР), ток воздуха в верхних дыхательных путях либо отсутствует, либо очень слаб, а следовательно, уровень шумов дыхания отсутствует или низкий. Обозначим начальный уровень шумов N0 дыхания. Во время ИВЛ прибор фиксирует значения шумов Ni. Если значения Ni больше N0, ИВЛ имела положительный эффект. По отношению величин Nt к Ni-1, a также к N0 определяется динамика шумов дыхания, по которой восстанавливается наличие и динамика тока воздуха в верхних дыхательных путях.
Процесс реанимации человека, как было рассмотрено ранее, можно представить в виде следующей временной последовательности:
1) To - момент времени, в который реанимирующий персонал зафиксировал устройство на пациенте;
2) Тр - время фактического начала реанимационных мероприятий;
3) Тслр - временной интервал мероприятий СЛР, состоящий из двух последовательных интервалов Тнмс и Тивл;
4) Ткп - временной интервал контрольной паузы СЛР.
За временной промежуток (Т0, Тр) персонал еще не успевает начать СЛР, однако устройство уже собирает информацию о шумах дыхания, которая в дальнейшем будет считаться точкой отсчета.
Начиная с момента времени Тр, персонал проводит непрямой массаж сердца, а затем мероприятия ИВЛ в течение интервала времени Тивл. За это время устройство с определенной частотой получает информацию о шумах дыхания. Исходя из самого процесса ИВЛ во время СЛР, очевидно, что уровень шумов должен быть значительно выше точки отсчета и иметь псевдо-ритмичный характер.
По истечению временного интервала Тивл, персонал делает кратковременную контрольную паузу Ткп, чтобы оценить успешность мероприятий СЛР. Аналогично, устройство во время паузы определяет уровень самостоятельных шумов дыхания, которые, в случае успеха, должны значительно отличаться в большую сторону от уровня шумов точки отсчета.
В течение всего времени мероприятий СЛР устройство N раз в секунду получает информацию с 2 датчиков, фиксирующих уровень шумов дыхания. Обозначим полученные данные на i-том шаге измерений ri=(Pi1,Pi2) Из полученных двух значений с разных датчиков формируются три величины:
 - минимальное на i-том шаге,
- минимальное на i-том шаге,
 - максимальное на i-том шаге,
- максимальное на i-том шаге,
 - среднее на i-том шаге.
- среднее на i-том шаге.
Таким образом, в течение всего периода СЛР устройством формируется три дискретных функции: Pmin(t), Pmax(t), Pavg(t) динамика которых прямо пропорциональна динамике тока воздуха в верхних дыхательных путях реанимируемого. Исходя из соотношения данных функций и их производных по времени, будет восстанавливаться функция динамики тока воздуха.
Метод позволяет контролировать корректность проводимых реанимационных мероприятий. Для этого устройство сначала определит время начала реанимационных мероприятий, как время первой максимальной производной функции шумов дыхания (начало реанимационных мероприятий - самый первый и, как правило, самый резкий переход от отсутствующих шумов к максимальному уровню). Так как устройство задает ритм работы реанимирующего персонала, фактически, оно может сравнить, сопровождается ли начало ИВЛ шумами дыхания.
Время начала ИВЛ по функциям шумов кровотока определить не удается, когда уровень шумов дыхания не изменился, что возможно, если: - ИВЛ выполняется неправильно;
- имеется непроходимость верхних дыхательных путей (ВДП) или инородные тела в ВДП;
- ИВЛ не выполняется персоналом (игнорируется сигнал прибора к началу ИВЛ).
Метод позволяет определить успешность ИВЛ, когда самостоятельное дыхание восстановлено. В этом случае во время контрольной паузы уровень шумов дыхания будет отличаться от базового уровня шумов до ИВЛ.
Анализ динамики состояние зрачка по изображению глаза
Устройство, используя встроенную видеокамеру со светодиодной подсветкой, N раз в секунду получает для анализа изображение глаза реанимируемого. Изображение глаза, плоскость которого ортогональна направлению камеры, представлено на фиг. 9. Изображение глаза, плоскость которого находится под углом к направлению камеры, представлено на фиг. 10
С помощью алгоритмов сегментации, бинаризации, гауссоваразмытия, повторяющегося вычитающего сдвига, подготавливается изображение для анализа, на которого определяется область Азр, занимаемая зрачком глаза и область Арад, занимаемая радужной оболочкой.
Из фиг. 9, 10 видно, что сометрически форма зрачка и радужной оболочки (камера получает изображение, являющееся проекцией) зависит от угла между плоскостью глаза и камерой. В общем случае формами будут эллипсы. Определение полуоси эллипса, произвольно ориентированного в пространстве по его проекции, может занять продолжительное время в условиях ограниченных вычислительных возможностях. Также, встает вопрос об определении динамики геометрических размеров эллипса в условии возможных колебаний камеры и, как следствие, изменение угла проекции, что приведет к смене эксцентриситета (отношения длин полуосей друг к другу).
Ввиду вышесказанного, требуется величина, которая была бы инвариантна относительно изменению масштаба (приближения и удаления камеры к глазу), а также относительно изменения угла между плоскостью глаза и камерой. Такая величина - корень квадратный из отношения площади зрачка к площади радужной оболочки.
Предположим, что в условии отсутствия динамики зрачка камера прибора изменила свое положение или масштаб так, что все линейные размеры на изображении изменились в k раз, а из-за изменения угла обзора эксцентриситет  обоих эллипсов изменился в n раз;
обоих эллипсов изменился в n раз; 
Очевидно, что эксцентриситет и линейные размеры зрачка и радужной оболочки меняются на одинаковые величины, так как они лежат в одной плоскости.
Пусть большая и малая полуоси зрачка и радужной оболочки до изменения были (а0, b0) и (А0, В0) соответственно. Площадь эллипса вычисляется по формуле S=πАВ, где А и В - полуоси эллипса. Тогда отношение площадей примет вид:
После изменений большая и малая полуоси зрачка и радужной оболочки примут вид (а0, b0) и (А0, В0):
Следовательно, корень квадратный из отношения площади области зрачка к площади области радужной оболочки  будет искомым значением, динамика которого прямо связана с динамикой зрачка глаза и не зависит от расстояния от камеры до изображения, разрешающей способности камеры и масштаба и угла обзора.
будет искомым значением, динамика которого прямо связана с динамикой зрачка глаза и не зависит от расстояния от камеры до изображения, разрешающей способности камеры и масштаба и угла обзора.
Пусть полученные данные на i-том шаге измерений Pi. По отношению величин Pi к Pi-1 а также к Р0 определяется динамика зрачка глаза.
Отрицательной динамикой зрачка глаза реанимируемого является отсутствие изменения или увеличение диаметра зрачка, а следовательно  Положительная динамика - уменьшение диаметра зрачка
Положительная динамика - уменьшение диаметра зрачка  свидетельствует о восстановлении кровоснабжения головного мозга, снижение уровня гипоксии и, как следствие, появление отклика зрачка на свет (зрачкового рефлекса).
свидетельствует о восстановлении кровоснабжения головного мозга, снижение уровня гипоксии и, как следствие, появление отклика зрачка на свет (зрачкового рефлекса).
Достоинства (отличия) предлагаемого способа и устройства от известного заключается в следующем:
1) контроль эффективности непрямого массажа сердца;
2) контроль эффективности искусственного дыхания;
3) автоматическое отслеживание диаметра зрачка и радужной оболочки глаза;
4) измерение кровотока биоимпедансным методом и характеристик (амплитуда, частота) пульса;
5) звуковое инструктирование реанимирующего лица при проведении СЛР;
6) пользовательский интерфейс для передачи визуальной информации;
7) анализ выдыхаемого газа;
8) оперативное световое извещение в состоянии пациента;
9) интеллектуальное (автоматическое) принятие решения о состоянии пациента;
10) вывод информации на дисплей;
11) мобильность (переносимость, компактность) устройства;
12) высокие быстродействие и точность оценки состояния пациента;
13) перепрограммируемость (за счет использования программ высоко уровня и флэш-памяти);
14) связь с системой интернет;
15) бесперебойность питания (за счет использования аккумулятора и солнечной батареи);
16) связь с центральным пультом управления.
Таким образом, по сравнению с известными, предполагаемые способ и устройство обладают улучшенными характеристиками, обеспечивающими быстрое и качественное ведение сердечно-легочной реанимации, а также удобством в обслуживании.
Источники информации
1. Патент RU 56156 U1. Устройство для регистрации дыхательных шумов. Авторы: Фурман Е.Г. (RU), Корюкина И.П. (RU), приоритет от 10.10.2005.
2. Патент RU 66174 U1. Устройство регистрации и анализа дыхательных шумов. Авторы: Филимонова Н.Н. (RU), Аль Нажжар Гоман Канд A. (RU), приоритет от 10.04.2007.
3. Патент JP 2000176025 (A). System for measuring and analyzing cardiopulmonary resuscitation parameter with extenol defibrillator or training defibrillator. Заявитель: LAERDAL MEDICAL (AS), приоритет от 27.06.2000.
4. Патент RU 2008123883 А. Сердечно-легочная реанимация, управляемая посредством измерения сосудистого кровотока. Авторы Аяти Шервин (US), Коэн-Солаль Эрик (US), конвенционный приоритет 17.11.2005 US 60/737,909.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТРАБОТКИ ПРАКТИЧЕСКИХ НАВЫКОВ АУСКУЛЬТАЦИИ С ПОМОЩЬЮ МЕДИЦИНСКОГО ТРЕНАЖЕРА | 2019 |
|
RU2693445C1 |
| Способ мониторинга эффективности сердечно-легочной реанимации | 2020 |
|
RU2737915C1 |
| РЕАНИМАЦИОННЫЙ НАБОР ДЛЯ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЁГКИХ | 2024 |
|
RU2838415C1 |
| РОБОТ-ТРЕНАЖЕР | 2005 |
|
RU2278420C1 |
| СПОСОБ ОТРАБОТКИ ПРАКТИЧЕСКИХ НАВЫКОВ АУСКУЛЬТАЦИИ С ПОМОЩЬЮ МЕДИЦИНСКОГО ТРЕНАЖЕРА | 2017 |
|
RU2684187C1 |
| СПОСОБ ОТРАБОТКИ ПРАКТИЧЕСКИХ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ И АУСКУЛЬТАЦИИ С ПОМОЩЬЮ МЕДИЦИНСКОГО ТРЕНАЖЕРА | 2019 |
|
RU2693446C1 |
| СПРОСОБ ОТРАБОТКИ ПРАКТИЧЕСКИХ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ И АУСКУЛЬТАЦИИ С ПОМОЩЬЮ МЕДИЦИНСКОГО ТРЕНАЖЕРА | 2018 |
|
RU2689756C1 |
| Искусственный глаз | 1982 |
|
SU1027756A1 |
| ТРЕНАЖЕР ХИРУРГИЧЕСКОЙ ОПЕРАЦИОННОЙ | 2014 |
|
RU2546404C1 |
| СПОСОБ ОТРАБОТКИ ПРАКТИЧЕСКИХ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ И ДИАГНОСТИКЕ РАЗЛИЧНЫХ ВИДОВ ПАТОЛОГИЙ СЕРДЦА С ПОМОЩЬЮ МЕДИЦИНСКОГО ТРЕНАЖЕРА | 2019 |
|
RU2693444C1 |

Изобретение относится к медицинской технике, а именно к средствам для проведения сердечно-легочной реанимации человека. Устройство для контроля сердечно-легочной реанимации содержит ультразвуковой преобразователь, блок электродов, подключенных через интерфейс к процессору, связанному с дисплеем, блоком памяти, звуковым сигнализатором, блоком светодиодных сигнализаторов, блоком связи с центральным пультом управления, блоком выбора режима работы, блоком связи с Интернет и, через USB-интерфейс, с блоком программного обеспечения верхнего уровня. Устройство также содержит цветную телевизионную микрокамеру, подключенную через последовательно установленные блок усиления и фильтрации сигнала и блок обработки и совмещения изображений к дополнительному входу/выходу процессора, блок подсветки, блок измерения пульса, газоанализатор, блок микрофонов с блоком согласования, подключенные к процессору и блок питания. Блок измерения пульса и блок электродов выполнены с возможностью закрепления на пациенте посредством блока крепления, а блок микрофонов, управляемый блок подсветки и газоанализатор закреплены на пациенте посредством дополнительного блока крепления. Способ контроля содержит этапы получения ультразвуковых эхосигналов и электросигналов, характеризующих кровоток в кровеносном сосуде, определение характеристики кровотока по импедансу тканей шеи во время проведения сердечно-легочной реанимации, отображение звуковой и визуальной информации о состоянии пациента. После чего формируют текущую информацию о состоянии пациента по цветным телевизионным изображениям и определяют геометрические и цветные характеристики зрачка и радужной оболочки глаза, оценивая цвет и геометрические характеристики кровеносных сосудов. Снимают и анализируют также звуковые гортанные сигналы, выдыхаемый газ и пульс пациента, сигнализируют световыми сигналами о состоянии пациента и оценивают состояние пациента на основании данных сравнения эталонной и текущей информации. Использование изобретения позволяет расширить функциональные возможности, повысить быстродействие, оперативность и точность при проведении сердечно-легочной реанимации. 2 н. и 14 з.п. ф-лы, 10 ил. 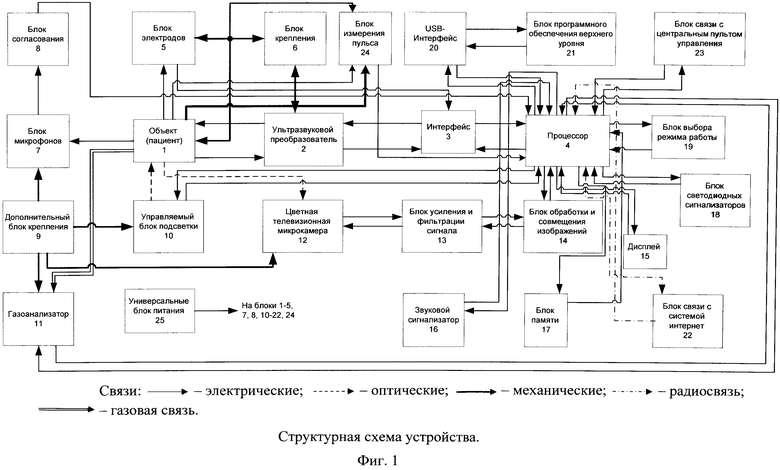
1. Устройство для контроля сердечно-легочной реанимации, содержащее ультразвуковой преобразователь, блок электродов, подключенные через интерфейс к процессору, связанному с дисплеем, блоком памяти, звуковым сигнализатором, блоком светодиодных сигнализаторов, блоком связи с центральным пультом управления, блоком выбора режима работы, блоком связи с Интернет и, через USB-интерфейс, с блоком программного обеспечения верхнего уровня, цветную телевизионную микрокамеру, подключенную через последовательно установленные блок усиления и фильтрации сигнала и блок обработки и совмещения изображений к дополнительному входу/выходу процессора, блок подсветки, блок измерения пульса, газоанализатор, блок микрофонов с блоком согласования, подключенные к процессору, и блок питания, при этом блок измерения пульса и блок электродов выполнены с возможностью закрепления на пациенте посредством блока крепления, а блок микрофонов, управляемый блок подсветки и газоанализатор выполнены с возможностью закрепления на пациенте посредством дополнительного блока крепления.
2. Устройство по п. 1, отличающееся тем, что блок микрофонов включает не менее шести микрофонов и размещается в области гортани и в проекции бифрукации сонных артерий пациента.
3. Устройство по п. 1, отличающееся тем, что газоанализатор выполнен в виде полумаски.
4. Устройство по п. 1, отличающееся тем, что блок выбора режима является клавиатурой.
5. Устройство по п. 1, отличающееся тем, что блок памяти является флэш-накопителем данных.
6. Устройство по п. 1, отличающееся тем, что блок связи с центральным пультом управления выполнен в виде приемопередатчика.
7. Устройство по п. 1, отличающееся тем, что блоком связи с Интернет является сетевым адаптером.
8. Устройство по п. 1, отличающееся тем, что блок питания содержит аккумулятор и солнечную батарею.
9. Способ контроля сердечно-легочной реанимации с использованием устройства по п. 1, включающий получение ультразвуковых эхосигналов и электросигналов, характеризующих кровоток в кровеносном сосуде, определение характеристики кровотока по импедансу тканей шеи во время проведения сердечно-легочной реанимации, отображение звуковой и визуальной информации о состоянии пациента, далее формируют текущую информацию о состоянии пациента, для чего снимают цветные телевизионные изображения и определяют геометрические и цветные характеристики зрачка и радужной оболочки глаза, оценивая цвет и геометрические характеристики кровеносных сосудов, снимают и анализируют звуковые гортанные сигналы, снимают и анализируют выдыхаемый газ и пульс пациента, сигнализируют световыми сигналами о состоянии пациента и оценивают состояние пациента на основании данных сравнения эталонной и текущей информации.
10. Способ по п. 9, отличающийся тем, что анализ цветных телевизионных изображений осуществляется при совмещении текущего и эталонного изображений по масштабу, цвету, выделении информативных признаков в виде контуров линий, точек, постоянно наблюдаемых и изменяющихся частей, цвета и яркости.
11. Способ по п. 9, отличающийся тем, что при анализе геометрических характеристик зрачка определяется диаметр зрачка.
12. Способ по п. 9, отличающийся тем, что глаз пациента освещается управляемой цветной подсветкой.
13. Способ по п. 9, отличающийся тем, что при анализе выдыхаемого газа определяется его химический состав.
14. Способ по п. 1, отличающийся тем, что анализ звуковых сигналов осуществляется на частотах 20-180 и 260-680 Гц.
15. Способ по п. 9, отличающийся тем, что анализ импеданса тканей шеи осуществляется путем оценки таких его характеристик, как емкость, сопротивление и их отношение.
16. Способ по п. 9, отличающийся тем, что измеряется амплитуда и частота пульса.
| US 2010022886 A1, 28.01.2010 | |||
| US 2010042179 A1, 18.02.2010 | |||
| US 2011176106 A1, 21.07.2011 | |||
| СПОСОБ КОНТРОЛЯ ВНУТРИЧЕРЕПНОГО ДАВЛЕНИЯ ПРИ ПРОВЕДЕНИИ ГИПЕРБАРИЧЕСКОЙ ОКСИГЕНАЦИИ В УСЛОВИЯХ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ У БОЛЬНЫХ С ВНУТРИЧЕРЕПНЫМИ КРОВОИЗЛИЯНИЯМИ, НАХОДЯЩИХСЯ В КРИТИЧЕСКОМ СОСТОЯНИИ | 2010 |
|
RU2447833C1 |
| А.Ш | |||
| Бурев и др., УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ КОМПРЕССИИ ГРУДНОЙ КЛЕТКИ ЧЕЛОВЕКА ПРИ СЕРДЕЧНО-ЛЕГОЧНОЙ РЕАНИМАЦИИ, Вестник науки Сибири | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

