ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к технологии представления состояния нестабильного вождения водителю.
УРОВЕНЬ ТЕХНИКИ
[0002] В устройстве поддержки вождения для транспортного средства, описанном в патентном документе 1, вычисляется долговременное распределение состояний движения, соответствующее характеристикам вождения в нормальном режиме, и кратковременное распределение состояний движения, соответствующее текущим характеристикам вождения, и состояние нестабильного вождения определяется на основе абсолютной величины разности между вычисленными двумя распределениями. Следует указать, что можно точно определять нестабильное состояние независимо от изменения окружающей обстановки дорожного движения согласно этому способу.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. JP 2009-9495 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧА ДЛЯ РЕШЕНИЯ
[0004] Тем не менее, в технологии, раскрытой в патентном документе 1, когда обучение для получения долговременного распределения состояний движения не завершено до такой степени, что характеристики вождения в нормальном режиме считаются понимаемыми, т.е. когда характеристики вождения в нормальном режиме не понимаются, точность определения состояния нестабильного вождения водителя понижается.
Настоящее изобретение осуществлено с учетом вышеуказанных обстоятельств, и его цель заключается в том, чтобы представлять состояние нестабильного вождения водителю, даже когда обучение по характеристикам вождения в нормальном режиме не завершено.
РЕШЕНИЕ ЗАДАЧИ
[0005] Чтобы достичь вышеуказанной цели, согласно аспекту настоящего изобретения, предоставляется первый модуль определения нестабильности вождения для оценки нестабильности вождения на основе разности между множественными распределениями состояний движения для различных диапазонов времени на основе полученных данных состояний движения. Согласно аспекту настоящего изобретения, предоставляется второй модуль определения нестабильности вождения для оценки нестабильности вождения на основе данных состояний движения с помощью процесса, отличающегося от процесса оценки первого модуля определения нестабильности вождения. Согласно аспекту настоящего изобретения, выбирается нестабильность, оцененная посредством первого модуля определения нестабильности вождения, когда предварительно определенное время обучения истекает от начала сбора данных состояний движения, и определяется то, что обучение завершено, и нестабильность, оцененная посредством второго модуля определения нестабильности вождения, когда определяется то, что обучение не завершено. Согласно аспекту настоящего изобретения, информация нестабильности на основе выбранной нестабильности представляется водителю.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0006] Согласно аспекту настоящего изобретения, можно представлять состояние нестабильного вождения водителю в зависимости от нестабильности вождения, оцененной посредством второго модуля определения нестабильности вождения, даже когда обучение для получения распределений состояний движения, используемых посредством первого модуля определения нестабильности вождения, не завершено до такой степени, что характеристики вождения в нормальном режиме рассматриваются как понятные.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является схемой, иллюстрирующей конфигурацию транспортного средства согласно вариантам осуществления настоящего изобретения;
Фиг. 2 является схемой, иллюстрирующей пример конфигурации системы согласно первому-четвертому вариантам осуществления настоящего изобретения;
Фиг. 3 является схемой, иллюстрирующей процесс в модуле представления информации согласно первому варианту осуществления настоящего изобретения;
Фиг. 4A и 4B являются схемами, иллюстрирующими пример информации, представленной водителю;
Фиг. 5 является схемой, иллюстрирующей пример вычисления относительной энтропии;
Фиг. 6 является схемой, иллюстрирующей обозначения, используемые для того, чтобы вычислять относительную энтропию;
Фиг. 7 является схемой, иллюстрирующей способ вычисления предыдущего или долговременного распределения и непосредственно предшествующего распределения на основе данных ошибок прогнозирования угла поворота при рулении;
Фиг. 8 является схемой, иллюстрирующей способ вычисления относительной энтропии;
Фиг. 9 является схемой, иллюстрирующей секции ошибки прогнозирования угла поворота при рулении;
Фиг. 10 является схемой, иллюстрирующей процесс в модуле представления информации согласно второму варианту осуществления настоящего изобретения;
Фиг. 11 является схемой, иллюстрирующей процесс в модуле представления информации согласно третьему варианту осуществления настоящего изобретения;
Фиг. 12 является схемой, иллюстрирующей процесс в модуле представления информации согласно четвертому варианту осуществления настоящего изобретения;
Фиг. 13 является схемой, иллюстрирующей пример конфигурации системы согласно пятому варианту осуществления настоящего изобретения;
Фиг. 14 является схемой, иллюстрирующей процесс в модуле представления информации согласно пятому варианту осуществления настоящего изобретения;
Фиг. 15 является схемой, иллюстрирующей пример конфигурации системы согласно шестому варианту осуществления настоящего изобретения; и
Фиг. 16 является схемой, иллюстрирующей процесс в модуле представления информации согласно шестому варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Первый вариант осуществления
Сначала описывается первый вариант осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
Конфигурация
Фиг. 1 является схемой, иллюстрирующей конфигурацию транспортного средства, имеющего смонтированное устройство предоставления информации для использования в транспортном средстве согласно этому варианту осуществления.
Как показано на фиг. 1, транспортное средство этого варианта осуществления включает в себя датчик 1 степени открытия педали акселератора, датчик 2 рабочей величины нажатия педали тормоза, датчик 3 угла поворота при рулении, датчик 4 скорости транспортного средства, датчик 5 определения состояния указателя поворота, приборную панель 6, навигационную систему 7, G-датчик 8, устройство 9 определения едущих впереди транспортных средств и контроллер 100. Транспортное средство, к которому применяется настоящее изобретение, не обязательно должно включать в себя вышеуказанные датчики и другое комплексное оборудование. Датчики, используемые в других вариантах осуществления, описываются совместно.
[0009] Датчик 1 степени открытия педали акселератора определяет степень открытия (инструктированное значение ускорения) педали акселератора в качестве инструктированного значения ускорения. Определенная степень открытия выводится в контроллер 100.
Датчик 2 рабочей величины нажатия педали тормоза определяет рабочую величину (инструктированное тормозное усилие) педали тормоза в качестве инструктированного тормозного усилия. Определенная рабочая величина выводится в контроллер 100.
Датчик 3 угла поворота при рулении представляет собой, например, датчик угла поворота, прикрепленный около рулевой колонки или руля (не показан), и определяет угол поворота при рулении согласно операции руления водителя на основе вращения рулевого вала. Определенный угол поворота при рулении выводится в контроллер 100.
[0010] Датчик 4 скорости транспортного средства определяет скорость транспортного средства, например, посредством определения числа оборотов колеса транспортного средства. Определенная скорость транспортного средства выводится в контроллер 100. Датчик 4 скорости транспортного средства может определять скорость транспортного средства на основе сигнала в приборную панель 6.
Датчик 5 определения состояния указателя поворота определяет состояние указателя поворота для ручки включения указателя поворота. Определенное состояние указателя поворота выводится в контроллер 100.
[0011] Устройство предоставления информации выводит сигнал оповещения или другие представления в качестве звука или изображения в ответ на управляющий сигнал из контроллера 100. Устройство предоставления информации включает в себя динамик 10, который предоставляет информацию водителю, например, с использованием звукового сигнала или речи, и модуль отображения, который предоставляет информацию через отображение изображения или текстов. Монитор навигационной системы 7 может быть использован, в общем, в качестве модуля отображения.
[0012] Навигационная система 7 включает в себя приемное GPS-устройство, картографическую базу данных и монитор и представляет собой систему, которая выполняет поиск маршрута, навигацию на основе инструкций по маршруту и т.п. Навигационная система 7 допускает получение такой информации, как тип дороги, по которой движется транспортное средство, или ширина дороги, на основе текущей позиции транспортного средства, полученной из приемного GPS-устройства, и информации дороги, сохраненной в картографической базе данных.
[0013] G-датчик 8 определяет продольное ускорение или поперечное ускорение, сформированное в транспортном средстве. Определенное ускорение выводится в контроллер 100.
Устройство 9 определения едущих впереди транспортных средств определяет другие транспортные средства и другие объекты, присутствующие впереди в направлении движения транспортного средства. В этом варианте осуществления, определяется расстояние до объекта. Устройство 9 определения едущих впереди транспортных средств включает в себя, например, лазерный дальномер. Определенное расстояние выводится в контроллер 100 в качестве информации для вычисления расстояния между транспортными средствами, времени между транспортными средствами, относительной скорости и т.п.
[0014] Контроллер 100 является электронным модулем управления, включающим в себя CPU и периферийные компоненты CPU, такие как ROM и RAM, и включает в себя модуль 100A представления информации, который выполняет процесс управления предоставлением информации. Модуль 100A представления информации контроллера 100 анализирует характеристики вождения водителя на основе сигналов, определенных посредством датчика 1 степени открытия педали акселератора, датчика 2 рабочей величины нажатия педали тормоза, датчика 3 угла поворота при рулении и т.п., и определяет степень нестабильности вождения, к примеру, некорректную операцию вождения водителя. Модуль 100A представления информации представляет сигнал оповещения или другую информацию водителю в зависимости от степени нестабильности вождения, чтобы привлекать внимание водителя.
[0015] Фиг. 2 является схемой, иллюстрирующей пример конфигурации системы устройства предоставления информации для использования в транспортном средстве, включающего в себя модуль 100A представления информации согласно этому варианту осуществления.
Устройство предоставления информации для использования в транспортном средстве согласно этому варианту осуществления использует информацию из датчика 3 угла поворота при рулении в качестве данных состояний движения, как показано на фиг. 2. Устройство предоставления визуальной информации и устройство предоставления звуковой информации иллюстрируются в качестве устройства представления информации. Устройство предоставления визуальной информации представляет собой, например, приборную панель 6 или модуль отображения навигационной системы 7. Устройство предоставления звуковой информации представляет собой, например, динамик 10.
Таймер 50 используется для того, чтобы получать время движения от начала сбора данных состояний движения.
Конфигурация, идентичная конфигурации системы, показанной на фиг. 2, используется посредством систем согласно второму-четвертому вариантам осуществления, которые описываются ниже.
[0016] Процесс модуля 100A представления информации описывается со ссылкой на фиг. 3. Процесс модуля 100A представления информации выполняется в предварительно определенном цикле управления (например, 100 мс).
Во-первых, на этапе S1010, модуль 100A представления информации получает следующие данные в качестве информационных данных касательно транспортного средства. Иными словами, модуль 100A представления информации получает угол поворота при рулении в качестве данных состояний движения из датчика 3 угла поворота при рулении.
[0017] На этапе S1030, модуль 100A представления информации определяет состояние обучения. В этом варианте осуществления, время движения от начала сбора данных используется для того, чтобы определять состояние обучения. Степень SD обучения может быть вычислена с использованием числа собранных фрагментов данных.
В частности, на этапе S1030, модуль 100A представления информации вычисляет степень SD обучения на основе следующего выражения.
Степень SD обучения = время(-ена) движения/(диапазон времени * коэффициент)
Время движения: время после начала движения
Диапазон времени: диапазон времени (например, 2000 секунд) распределения состояний движения
Коэффициент: коэффициент (например, 5), ассоциированный со временем сходимости
Значение (диапазон времени * коэффициент) соответствует предварительно определенному времени обучения.
Время движения получается из таймера 50.
[0018] На этапе S1030, модуль 100A представления информации затем определяет состояние обучения из вычисленной степени SD обучения.
В этом варианте осуществления, когда степень SD обучения равна или более "1", определяется то, что состояние обучения является состоянием завершенного обучения. С другой стороны, когда степень SD обучения меньше "1", определяется то, что состояние обучения является состоянием незавершенного обучения.
На этапе S1040, модуль 100A представления информации определяет способ вычисления нестабильности на основе состояния обучения, определенного на этапе S1030. В частности, модуль 100A представления информации выполняет процесс этапа S1050, когда определяется то, что состояние обучения является состоянием завершенного обучения (степень SD обучения≥1). С другой стороны, модуль 100A представления информации выполняет процесс этапа S1070, когда определяется то, что состояние обучения является состоянием незавершенного обучения (степень SD обучения<1).
[0019] Когда определяется то, что обучение завершено, и процесс переходит к этапу S1050, модуль 100A представления информации вычисляет множественные распределения состояний движения при вождении с использованием способа на основе энтропии руления и вычисляет значение разности (относительную энтропию) между распределениями. После этого, процесс переходит к этапу S1060.
[0020] В частности, на этапе S1050, модуль 100A представления информации вычисляет значение разности для определения того, насколько текущая операция вождения водителя отличается от операции вождения в нормальном режиме, т.е. того, является или нет текущая операция вождения нестабильной по сравнению с операцией вождения в нормальном режиме, на основе угла поворота при рулении, когда водитель выполняет операцию руления. Иными словами, на этапе S1050, относительная энтропия (характерный количественный показатель, нестабильность) вычисляется как значение, указывающее некорректную операцию, т.е. операцию неплавного вождения. В общем, в состоянии, в котором водитель не обращает внимание на операцию вождения, время, в которое не выполняется руление, превышает время операции вождения в нормальном режиме, при которой водитель обращает внимание на вождение, и в силу этого большая ошибка угла поворота при рулении накапливается. Следовательно, скорректированная величина руления, когда водитель обращает внимание на вождение, снова увеличивается. В этом варианте осуществления, относительная энтропия RHp вычисляется с использованием этой характеристики. В частности, вычисляется распределение ошибок при рулении (распределение состояний движения), накопленное в прошлом или в течение длительного времени до текущего момента, и распределение ошибок при рулении (распределение состояний движения) водителя в текущее время, полученное в течение короткого времени, т.е. множественные распределения состояний движения для различных диапазонов времени. С помощью распределения ошибок при рулении в течение длительного времени, которое рассматривается в качестве характеристик вождения в нормальном режиме в качестве опорного значения для сравнения, относительная энтропия RHp вычисляется на основе долговременного распределения ошибок при рулении и текущего кратковременного распределения ошибок при рулении.
[0021] Здесь, относительная энтропия RHp является физической величиной, указывающей значение разности (расстояние) между двумя распределениями ошибок при рулении, и представляет степень разности между двумя распределениями ошибок при рулении, т.е. то, насколько эти два распределения ошибок при рулении отклоняются друг от друга. Стабильность текущего непосредственно предшествующего состояния движения относительно предыдущего долговременного состояния движения (характеристик вождения в нормальном режиме) может быть оценена с использованием вычисленного значения относительной энтропии.
Пример вычисления распределения ошибок при рулении, накопленного в течение длительного времени, текущего распределения ошибок при рулении водителя, полученного в течение короткого времени, и значения разности (относительной энтропий) между распределениями описывается ниже.
[0022] На этапе S1060, модуль 100A представления информации определяет состояние нестабильного вождения на основе значения разности.
На этапе S1060 этого варианта осуществления, значение разности, вычисленное на этапе S1050, сравнивается с предварительно определенным пороговым значением для определения. Когда значение разности превышает пороговое значение для определения, определяется то, что состояние вождения является нестабильным. После этого, процесс переходит к этапу S1100.
[0023] С другой стороны, когда на этапе S1040 определено то, что обучение не завершено, процесс переходит к этапу S1070.
На этапе S1070, модуль 100A представления информации вычисляет текущий характерный количественный показатель (абсолютную энтропию) с использованием текущего распределения ошибок при рулении для более короткого диапазона времени. После этого, процесс переходит к этапу S1080. Абсолютная энтропия является ожидаемым значением, возникающим в рассматриваемом распределении состояний движения.
На этапе S1080, модуль 100A представления информации считывает характерный количественный показатель предшествующего вождения. Характерный количественный показатель предшествующего вождения является конечным значением (абсолютной энтропией) во время движения в прошлом. После этого, процесс переходит к этапу S1090.
[0024] На этапе S1090, модуль 100A представления информации сравнивает текущий характерный количественный показатель Hp_current, вычисленный на этапе S1070, с опорным характерным количественным показателем, полученным посредством умножения характерного количественного показателя Hp_old предшествующего вождения, считанного на этапе S1080, на коэффициент k, как выражается в следующем выражении. Когда текущий характерный количественный показатель Hp_current превышает опорный характерный количественный показатель (Hp_old*k), определяется то, что состояние движения является нестабильным. После этого, процесс переходит к этапу S1100.
Hp_current/(Hp_old*k)>1
Здесь, коэффициент k задается равным, например, 1,5.
[0025] На этапе S1100, модуль 100A представления информации выполняет процесс представления информации, когда на этапе S1060 или на этапе S1090 определено то, что состояние движения является нестабильным.
Пример информации, которая должна быть представлена, показывается на фиг. 4A и 4B. Иными словами, когда степень SD обучения равна или более "1", и определяется то, что состояние движения является нестабильным, устройство предоставления информации отображает предупреждение, как показано на фиг. 4A, и представляет предупреждающее голосовое сообщение, такое как "Вождение слишком нервное. Ведите автомобиль аккуратнее!".
[0026] С другой стороны, когда степень SD обучения меньше "1", и определяется то, что состояние движения является нестабильным, точность оценки может быть низкой, и в силу этого устройство предоставления информации представляет предупреждающее голосовое сообщение в форме вежливого оборота, к примеру "Как Ваше самочувствие? Соблюдайте осторожность при вождении".
Таким образом, информация, которая должна быть предоставлена, изменяется в зависимости от степени SD обучения.
На этапе S1110 сохраняется текущий характерный количественный показатель (абсолютная энтропия). Текущий характерный количественный показатель (характерный количественный показатель, вычисленный на этапе S1070) сохраняется для сравнения при следующей поездке (движении).
После этого, процесс завершается и возвращается.
[0027] Пример процесса вычисления распределения ошибок при рулении (распределения состояний движения), накопленного в течение длительного времени, текущего распределения ошибок при рулении (распределения состояний движения) водителя, полученного в течение короткого времени, и значения разности (относительной энтропии) между распределениями описывается со ссылкой на фиг. 5.
Подробности этого процесса непрерывно выполняются с постоянным интервалом, например, каждые 50 мс.
[0028] На этапе S10 сценарий движения транспортного средства оценивается (определяется), чтобы определять то, является или нет сценарий движения сценарием движения, в котором может вычисляться относительная энтропия RHp. Здесь, когда скорость V транспортного средства находится в предварительно определенном диапазоне скоростей транспортного средства (например, 40-120 км/ч), определяется то, что сценарий движения является сценарием движения, в котором может вычисляться относительная энтропия RHp. Иными словами, случай, в котором скорость транспортного средства является чрезмерно малой, и случай, в котором скорость транспортного средства является чрезмерно большой, исключаются из вычисляемого сценария движения, с тем чтобы эффективно вычислять относительную энтропию RHp с использованием сигнала угла поворота при рулении.
[0029] На этапе S20 определяется то, находится или нет текущая скорость V транспортного средства, определенная посредством датчика 4 скорости транспортного средства, в предварительно определенном диапазоне скоростей транспортного средства. Когда определяется то, что скорость V транспортного средства находится в предварительно определенном диапазоне скоростей транспортного средства, и сценарий движения является сценарием движения, в котором может вычисляться относительная энтропия RHp, процесс переходит к этапу S30 с тем, чтобы вычислять относительную энтропию RHp. С другой стороны, когда определяется то, что скорость V транспортного средства не находится в предварительно определенном диапазоне, процесс завершается.
[0030] На этапе S30, текущий сигнал θ угла поворота при рулении, определенный посредством датчика угла поворота при рулении, считывается в качестве рабочей величины вождения водителя, которая должна быть определена для того, чтобы определять состояние нестабильного вождения водителя. На этапе S31, ошибка θe прогнозирования угла поворота при рулении вычисляется на основе считанного значения сигнала θ угла поворота при рулении.
Здесь, специальные обозначения и названия, используемые для того, чтобы вычислять относительную энтропию RHp, показаны на фиг. 6. Сглаженное значение θn-tilde угла поворота при рулении является углом поворота при рулении, начиная с которого уменьшается влияние шума квантования. Оцененное значение θn-hat угла поворота при рулении является значением, полученным посредством оценки угла поворота при рулении во время дискретизации при условии, что руление выполняется плавно. Как выражается посредством выражения 1, оцененное значение θn-hat угла поворота при рулении получается посредством выполнения процесса разложения в ряд Тейлора второго порядка для сглаженного значения θn-tilde угла поворота при рулении.
[0031] "Математическое выражение 1"
 (выражение 1)
(выражение 1)
[0032] В выражении 1, tn представляет время дискретизации угла θn поворота при рулении.
Сглаженное значение θn-tilde угла поворота при рулении вычисляется как среднее значение трех соседних углов θn поворота при рулении в соответствии с выражением 2, с тем чтобы уменьшать влияние шума квантования.
[0033] "Математическое выражение 2"
 (выражение 2)
(выражение 2)
[0034] В выражении 2, l представляет число выборок углов θn поворота при рулении, включенных в 150 мс, когда временной интервал вычисления сглаженного значения θn-tilde угла поворота при рулении задается равным 150 мс, т.е. минимальному временному интервалу, в котором человек может периодически осуществлять манипуляции в ручном режиме.
Когда интервал дискретизации угла θn поворота при рулении задается как Ts, число l выборок выражается посредством выражения 3.
l=round(0,15/Ts) (выражение 3)
[0035] В выражении 2, k имеет значения 1, 2 и 3, и сглаженное значение θn-tilde может быть вычислено с использованием (k*l) на основе трех углов θn поворота при рулении в качестве суммы углов поворота при рулении с интервалами в 150 мс и соседних углов поворота при рулении, смежных с ними. Следовательно, оцененное значение θn-hat, вычисленное на основе сглаженного значения θn-tilde, вычисляется фактически на основе угла θ поворота при рулении, полученного с интервалами в 150 мс.
Ошибка θe прогнозирования угла поворота при рулении во время дискретизации может быть вычислена посредством выражения 4 в качестве разности между оцененным значением θn-hat угла поворота при рулении, когда предполагается, что операция руления выполняется плавно, и фактическим значением θn угла поворота при рулении.
[0036] "Математическое выражение 3"
 (выражение 4)
(выражение 4)
[0037] Здесь, ошибка θe прогнозирования угла поворота при рулении вычисляется для угла θn поворота при рулении через каждый минимальный временной интервал, т.е. 150 мс, в котором человек может периодически осуществлять манипуляции.
Ниже описывается конкретный способ вычисления ошибки θe прогнозирования угла поворота при рулении. Интервал Ts дискретизации сигнала θ угла поворота при рулении задается равным, например, 50 мс. Во-первых, три сглаженных значения θn-tilde угла поворота при рулении вычисляются в соответствии с выражением 2 с использованием трех соседних углов θn поворота при рулении с интервалом 150 мс. Три сглаженных значения θn-tilde угла поворота при рулении выражаются посредством выражения 5.
[0038] "Математическое выражение 4"
 (выражение 5)
(выражение 5)
[0039] Оцененные значения θn-hat угла поворота при рулении вычисляются в соответствии с выражением 1 с использованием вычисленных трех сглаженных значений θn-tilde угла поворота при рулении. Оцененные значения θn-hat выражаются посредством выражения 6.
[0040] "Математическое выражение 5"
 (выражение 6)
(выражение 6)
[0041] Ошибка θe прогнозирования при рулении вычисляется в соответствии с выражением 4 с использованием вычисленных оцененных значений θn-hat угла поворота при рулении и фактического угла θn поворота при рулении.
На этапе S40, данные ошибки θe прогнозирования угла поворота при рулении в течение предварительно определенного времени в T секунд, которые вычислены до настоящего времени и сохранены в запоминающем устройстве контроллера 100, обновляются посредством суммирования текущего значения ошибки θe прогнозирования угла поворота при рулении, вычисленного на этапе S31, с ними. Иными словами, самые первые данные за T секунд из накопленных данных ошибки θe прогнозирования угла поворота при рулении удаляются, и текущее значение, вычисленное на этапе S31, вводится вместо них в качестве самых последних данных ошибки θe прогнозирования угла поворота при рулении. Соответственно, данные ошибки θe прогнозирования угла поворота при рулении за T секунд от текущего значения накапливаются. Предварительно определенное время T задается равным, например, T=3600 секунд (=1 час), с тем, чтобы накапливать данные за длительный период, достаточные для того, чтобы вычислять долговременное распределение ошибок, которое является опорным значением для сравнения для определения нестабильного состояния текущей операции вождения.
[0042] На этапе S50 вычисляется предыдущее или долговременное распределение 1 ошибок прогнозирования угла поворота при рулении, которое служит в качестве опорного значения для сравнения распределения ошибок прогнозирования угла поворота при рулении. Здесь, как показано на фиг. 7, предыдущее распределение ошибок прогнозирования угла поворота при рулении вычисляется, например, с использованием данных в 180 секунд на основе данных за T секунд. В частности, накопленная предыдущая ошибка θe прогнозирования угла поворота при рулении классифицируется на девять секций b1-b9 ошибки прогнозирования, и вычисляется вероятность pi (=p1-p9) частоты ошибки θe прогнозирования угла поворота при рулении, включенной в каждую секцию bi относительно совокупной частоты. Вычисленное предыдущее распределение используется в качестве опорного значения для сравнения распределения ошибок прогнозирования угла поворота при рулении. Диапазон секции bi ошибки прогнозирования задается заранее таким образом, что он является постоянным во всех секциях b1-b9.
[0043] Когда вычисляется долговременное распределение ошибок прогнозирования угла поворота при рулении, используются все данные в 3600 секунд от момента за T секунд до текущего времени. В частности, накопленная долговременная ошибка θe прогнозирования угла поворота при рулении классифицируется на девять секций b1-b9 ошибки прогнозирования, и вычисляется вероятность pi (=p1-p9) частоты ошибки θe прогнозирования угла поворота при рулении, включенной в каждую секцию bi относительно совокупной частоты. Вычисленное предыдущее распределение (или долговременное распределение) используется в качестве предыдущего (или долговременного) распределения 1 ошибок прогнозирования угла поворота при рулении, служащего в качестве опорного значения для сравнения.
[0044] На этапе S51 вычисляется текущее распределение 2 ошибок прогнозирования угла поворота при рулении. Здесь, как показано на фиг. 7, текущее распределение 2 ошибок прогнозирования угла поворота при рулении вычисляется с использованием непосредственно предшествующих данных в 180 секунд с текущего времени. В частности, данные ошибки θe прогнозирования угла поворота при рулении за непосредственно предшествующих 180 секунд классифицируются на девять секций b1-b9 ошибки прогнозирования, и вычисляется вероятность qi (=q1-q9) частоты ошибки θe прогнозирования угла поворота при рулении, включенной в каждую секцию bi относительно совокупной частоты.
[0045] На этапе S70, относительная энтропия RHp вычисляется с использованием предыдущего (или долговременного) распределения 1 ошибок прогнозирования угла поворота при рулении и текущего распределения 2 ошибок прогнозирования угла поворота при рулении. Как показано на фиг. 8, относительная энтропия RHp является значением разности (расстоянием) между текущим распределением 2 ошибок прогнозирования угла поворота при рулении и предыдущим (или долговременным) распределением 1 ошибок прогнозирования угла поворота при рулении в качестве опорного значения для сравнения. Относительная энтропия RHp может быть вычислена с использованием выражения 7.
[0046] "Математическое выражение 6"
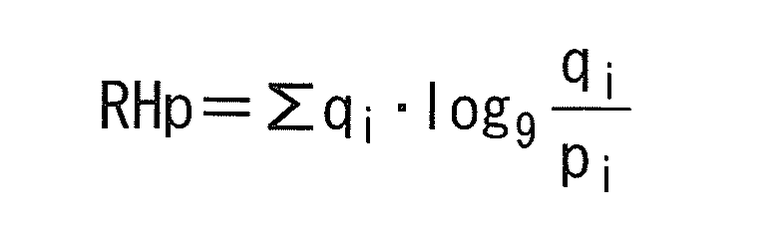 (выражение 7)
(выражение 7)
[0047] Относительная энтропия RHp становится равной RHp=0, когда вероятность pi предыдущего (или долговременного) распределения 1 ошибок прогнозирования угла поворота при рулении и вероятность qi текущего распределения 2 ошибок прогнозирования угла поворота при рулении равны друг другу, и значение RHp увеличивается, когда вероятности pi и qi все в большей степени отличаются друг от друга.
После чего процесс завершается. Вышеуказанный процесс выполняется многократно.
[0048] Диапазон секции bi ошибки прогнозирования для вычисления предыдущего (или долговременного) распределения 1 ошибок прогнозирования угла поворота при рулении и текущего распределения 2 ошибок прогнозирования угла поворота при рулении может задаваться на основе значения α, используемого для того, чтобы вычислять энтропию Hp руления, указывающую неоднозначность (неопределенность) в распределении ошибок при рулении. Здесь, значение α вычисляется как 90 процентилей (диапазон распределения, включающий в себя 90% ошибки при рулении) посредством вычисления ошибки при рулении в пределах постоянного времени, т.е. разности между оцененным значением угла поворота при рулении и фактическим углом поворота при рулении, когда предполагается, что операция руления выполняется плавно на основе данных временных рядов угла поворота при рулении, и измерения распределения (отклонения) ошибки при рулении.
[0049] Следовательно, значение α вычисляется на основе предыдущего (или долговременного) распределения ошибок прогнозирования угла поворота при рулении, и идентичный диапазон секций bi ошибки прогнозирования задается для предыдущего (или долговременного) распределения 1 ошибок прогнозирования угла поворота при рулении и текущего распределения 2 ошибок прогнозирования угла поворота при рулении с использованием вычисленного значения α. Фиг. 9 показывает диапазоны ошибки θe прогнозирования угла поворота при рулении секций bi, заданные с использованием значения α.
[0050] Работа и другие аспекты
Когда состояние обучения может рассматриваться как состояние завершенного обучения (в котором могут быть получены характеристики вождения в нормальном режиме водителя) на основе времени движения после того, как начинается сбор данных, устройство предоставления информации для использования в транспортном средстве вычисляет нестабильность с использованием способа на основе энтропии руления с помощью процессов этапов S1050 и S1060.
[0051] В это время, устройство предоставления информации для использования в транспортном средстве вычисляет значение разности между вычисленными множественными распределениями состояний движения и определяет состояние нестабильного вождения на основе абсолютной величины значения разности. Соответственно, можно точно определять состояние нестабильного движения независимо от изменения окружающей обстановки дорожного движения. Иными словами, можно точно определять нестабильное состояние в зависимости от обычных характеристик водителя независимо от изменения окружающей обстановки дорожного движения.
[0052] В это время, устройство предоставления информации для использования в транспортном средстве вычисляет множественные распределения состояний движения для различных диапазонов времени в качестве множественных распределений состояний движения. Например, устройство предоставления информации для использования в транспортном средстве вычисляет распределение состояний движения, включающее в себя предыдущие данные состояний движения, и распределение состояний движения, включающее в себя непосредственно предшествующие данные состояний движения, и напрямую вычисляет разность непосредственно предшествующего распределения состояний движения на основе предыдущего распределения состояний движения. Как результат, можно оценивать стабильность непосредственно предшествующего состояния при непрерывном обновлении опорных данных. Таким образом, можно точно определять нестабильное состояние движения независимо от изменения окружающей обстановки дорожного движения.
[0053] С другой стороны, когда определяется то, что состояние обучения является состоянием незавершенного обучения (SD<1), устройство предоставления информации для использования в транспортном средстве сравнивает предыдущие данные движения с абсолютной величиной одиночного распределения состояний движения, которое является распределением состояний движения для непосредственно предшествующего диапазона времени, указывающим текущее состояние движения, и определяет состояние нестабильного вождения (этапы S1070-S1090). Иными словами, посредством использования другого процесса вычисления нестабильности во время незавершения обучения, можно привлекать внимание, даже когда распределение состояний движения водителя неизвестно.
[0054] В вышеуказанном варианте осуществления, степень SD обучения вычисляется с использованием времени движения, оценивается то, можно или нет оценивать, что распределение состояний движения совпадает с характеристиками вождения водителя на основе степени SD обучения, и в силу этого определяется то, завершено или нет обучение. Степень SD обучения, используемая для того, чтобы оценивать, что распределение состояний движения совпадает с характеристиками вождения водителя, может быть вычислена на основе варьирования относительной энтропии, которая является характерным количественным показателем распределения состояний движения. Например, когда варьирование характерного количественного показателя долговременного распределения состояний движения равно или меньше предварительно определенного значения, значение, указывающее завершение обучения, задается в качестве степени SD обучения.
[0055] Здесь, этап S1010 составляет модуль получения состояний движения. Этап S1050 составляет первый модуль вычисления распределений состояний движения и первый модуль определения нестабильности вождения. Этап S1030 составляет модуль определения завершения обучения. Этапы S1070 и S1080 составляют второй модуль определения нестабильности вождения. Этап S1040 составляет модуль выбора нестабильности. Этап S1100 составляет модуль представления информации.
[0056] Преимущества этого варианта осуществления
(1) Модуль получения состояний движения получает данные состояний движения, включающие в себя, по меньшей мере, одно из операции вождения водителя и состояния транспортного средства. Первый модуль вычисления распределений состояний движения вычисляет множественные распределения состояний движения для различных диапазонов времени на основе данных состояний движения, полученных посредством модуля получения состояний движения. Первый модуль определения нестабильности вождения оценивает нестабильность вождения на основе значения разности между множественными распределениями состояний движения, вычисленными посредством первого модуля вычисления распределений состояний движения. Модуль определения завершения обучения определяет то, что обучение завершено, когда предварительно определенное время обучения истекает от начала сбора данных состояний движения, на основе степени SD обучения, которая является степенью, в которой распределение состояний движения, вычисленное посредством первого модуля вычисления распределений состояний движения, совпадает с характеристиками вождения водителя. Степень SD обучения вычисляется как степень, в которой распределение состояний движения, вычисленное посредством первого модуля вычисления распределений состояний движения, совпадает с характеристиками вождения водителя. Второй модуль определения нестабильности вождения оценивает нестабильность вождения посредством сравнения сравнительного распределения состояний движения, полученного на основе других данных состояний движения, отличающихся от данных состояний движения для непосредственно предшествующего диапазона времени, с распределением состояний движения для непосредственно предшествующего диапазона времени, которое указывает текущее состояние движения и вычисляется на основе данных состояний движения, полученных посредством модуля получения состояний движения. Модуль выбора нестабильности выбирает нестабильность, оцененную посредством первого модуля определения нестабильности вождения, когда обучение завершено, и выбирает нестабильность, оцененную посредством второго модуля определения нестабильности вождения, когда обучение завершено, на основе результата определения модуля определения завершения обучения. Модуль представления информации представляет информацию нестабильности на основе нестабильности, выбранной посредством модуля выбора нестабильности, водителю.
Посредством использования другого модуля вычисления нестабильности во время незавершения обучения, можно привлекать внимание, даже когда распределение состояний движения водителя неизвестно.
[0057] (2) Другие данные состояний движения являются данными состояний движения, полученными до непосредственно предшествующего диапазона времени. Второй модуль определения нестабильности вождения сравнивает сравнительное распределение состояний движения с распределением состояний движения для непосредственно предшествующего диапазона времени посредством использования отношения характерного количественного показателя распределения состояний движения для непосредственно предшествующего диапазона времени и опорного характерного количественного показателя, который является значением, полученным посредством умножения характерного количественного показателя распределения состояний движения, полученного из других данных состояний движения, на предварительно определенный коэффициент, и оценивает нестабильность вождения.
Посредством вычисления опорного характерного количественного показателя посредством умножения характерного количественного показателя распределения состояний движения, вычисленного из различных данных движения, на предварительно определенный коэффициент, можно повышать точность оценки нестабильности вождения посредством коррекции с использованием коэффициента, даже когда обучение не завершено.
[0058] (3) Второй модуль определения нестабильности вождения оценивает нестабильность вождения на основе, по меньшей мере, одной из информации данных состояний движения, полученных посредством модуля получения состояний движения, и информации сценария вождения транспортного средства.
Посредством использования данных поведения транспортного средства, других данных состояний движения и результата определения сценария вождения, можно точно определять состояние вождения водителя.
[0059] (4) Второй модуль определения нестабильности вождения оценивает нестабильность вождения с использованием одного из распределений состояний движения, вычисленных на основе данных состояний движения, полученных посредством модуля получения состояний движения.
Посредством использования распределения состояний движения водителя, можно применять статистический процесс и тем самым повышать точность.
[0060] (5) Когда модуль выбора нестабильности выбирает нестабильность, оцененную посредством второго модуля определения нестабильности вождения, и нестабильность, оцененная посредством второго модуля определения нестабильности вождения, превышает предварительно определенное пороговое значение для определения, определяется то, что состояние вождения является нестабильным.
Соответственно, можно просто определять состояние нестабильного вождения.
(6) Пороговое значение для определения задается на основе данных предыстории предыдущего движения.
Посредством использования предыстории предыдущего движения, можно повышать точность определения.
[0061] (7) Второй модуль определения нестабильности вождения включает в себя модуль хранения предыстории, который сохраняет данные предыстории предыдущего движения и определяет нестабильное состояние в отношении тенденции предыстории, сохраненной в модуле хранения предыстории.
Определение с использованием предыстории повышает эффективность определения.
(8) Модуль определения завершения обучения определяет степень SD обучения с использованием времени движения.
Посредством определения состояния обучения с использованием времени движения, можно уменьшать ошибочное определение завершения обучения.
[0062] (9) Модуль определения завершения обучения определяет завершение обучения с использованием варьирования в характерном количественном показателе одиночного распределения состояний движения.
Посредством определения состояния обучения на основе варьирования в характерном количественном показателе распределения состояний движения можно быстро определять завершение обучения.
(10) Распределение состояний движения вычисляется на основе рабочей величины операции руления.
Посредством определения распределения состояний движения на основе операции руления, требующей непрерывного манипулирования, можно точно определять состояние вождения.
[0063] (11) Способ на основе энтропии руления используется для того, чтобы вычислять распределение состояний движения на основе рабочей величины операции руления.
Посредством использования способа на основе энтропии руления, можно повышать производительность определения.
(12) Модуль представления информации изменяет информацию нестабильности, которая должна быть представлена, в зависимости от результата завершения обучения, определенного посредством модуля определения завершения обучения.
Посредством изменения информации, которая должна быть представлена, в зависимости от результата определения завершения обучения, можно повышать адаптируемость к езде водителя.
[0064] Второй вариант осуществления
Ниже описывается второй вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные с элементами первого варианта осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления. Они отличаются друг от друга различным процессом вычисления нестабильности, выполняемым, когда состояние обучения определяется как состояние незавершенного обучения.
В этом варианте осуществления, другой процесс вычисления нестабильности выполняется посредством сравнения абсолютной величины одиночного распределения состояний движения со значением, вычисленным на основе распределений среднестатистических водителей, и определения того, является или нет состояние вождения нестабильным.
[0065] Ниже описывается процесс в модуле 100A представления информации согласно этому варианту осуществления в отношении блок-схемы последовательности операций способа по фиг. 10.
Здесь, процессы этапов S2010-S2070 являются идентичными процессам этапов S1010-S1070 в первом варианте осуществления. Процессы этапов S2100 и S2110 являются идентичными процессам этапов S1100 и S1110. Соответственно, такие процессы не описываются повторно.
[0066] Ниже описывается процесс этапа S2080.
На этапе S2080 в этом варианте осуществления, модуль 100A представления информации считывает характерные количественные показатели среднестатистических водителей, заранее сохраненные в модуле хранения.
Характерные количественные показатели среднестатистических водителей являются значениями, полученными посредством выполнения статистического процесса (например, усреднения) для характерных количественных показателей, полученных от множественных водителей заранее. Характерные количественные показатели среднестатистических водителей могут надлежащим образом обновляться через беспроводную связь и т.п. Характерные количественные показатели, полученные от водителей, вычисляются из данных состояний движения, полученных от водителей.
[0067] Другие процессы являются идентичными процессу в первом варианте осуществления.
Здесь, этап S2010 составляет модуль получения состояний движения. Этап S2050 составляет первый модуль вычисления распределений состояний движения и первый модуль определения нестабильности вождения. Этап S2030 составляет модуль определения завершения обучения. Этапы S2070 и S2080 составляют второй модуль определения нестабильности вождения. Этап S2040 составляет модуль выбора нестабильности. Этап S2100 составляет модуль представления информации.
[0068] Функциональные преимущества
В этом варианте осуществления, следующие преимущества могут быть получены в дополнение к преимуществам, описанным в первом варианте осуществления.
(1) Другие данные состояний движения, используемые во втором модуле определения нестабильности вождения, являются данными состояний движения, полученными заранее от множественных водителей. Пороговое значение для определения получается из характеристик распределений состояний движения, полученных от множественных водителей.
Посредством использования распределений, служащих в качестве исходных данных для среднестатистических водителей, можно прояснять нестабильное состояние водителя и тем самым повышать производительность определения.
[0069] Третий вариант осуществления
Ниже описывается третий вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные с элементами первого варианта осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления. В третьем варианте осуществления, другой процесс вычисления степени нестабильности, когда состояние обучения определяется как состояние незавершенного обучения, выполняется на основе предыстории характерного количественного показателя одиночного распределения, полученного на основе состояния движения для непосредственно предшествующего диапазона времени.
[0070] Ниже описывается процесс в модуле 100A представления информации согласно этому варианту осуществления в отношении блок-схемы последовательности операций способа по фиг. 11.
Процессы этапов S3010-S3070 являются идентичными процессам этапов S1010-S1070 в первом варианте осуществления. Процесс этапа S3100 является идентичным процессу этапа S1100. Соответственно, такие процессы не описываются повторно. Поскольку необязательно сохранять характерный количественный показатель в этом варианте осуществления, процесс этапа S1110 не выполняется.
[0071] Ниже описываются процессы этапов S3080 и S3090 в этом варианте осуществления.
На этапе S3080 этого варианта осуществления, модуль 100A представления информации сохраняет от нескольких до десяти фрагментов нестабильности, вычисленных на этапе S3070 с постоянными интервалами, и вычисляет отклонение, варьирование и абсолютное значение с тем, чтобы определять их тенденцию.
Отклонение представляет собой отклонение (среднеквадратическое отклонение) предыдущей нестабильности.
Варьирование основано на сравнении самой первой нестабильности с самой последней нестабильностью.
Абсолютное значение является абсолютным значением самой последней нестабильности.
[0072] На этапе S3090, модуль 100A представления информации определяет данные предыстории, вычисленные на этапе S3080.
Например, когда вышеуказанные три элемента (отклонение, варьирование и абсолютное значение) удовлетворяют условиям большого отклонения, значительного варьирования и большого абсолютного значения, определяется то, что состояние вождения является нестабильным. Когда некоторые условия для трех элементов удовлетворяют условиям, например, когда удовлетворяется любое одно условие, может быть определено то, что состояние вождения является нестабильным.
Здесь, когда отклонение превышает предварительно определенное пороговое значение для отклонения, определяется то, что отклонение является большим. Когда абсолютное значение варьирования превышает предварительно определенное пороговое значение для варьирования, определяется то, что варьирование больше. Когда абсолютное значение превышает предварительно определенное пороговое значение для абсолютного значения, определяется то, что абсолютное значение является большим.
[0073] Другие процессы являются идентичными процессу в первом варианте осуществления.
Здесь, этап S3010 составляет модуль получения состояний движения. Этап S3050 составляет первый модуль вычисления распределений состояний движения и первый модуль определения нестабильности вождения. Этап S3030 составляет модуль определения завершения обучения. Этапы S3070 и S3080 составляют второй модуль определения нестабильности вождения. Этап S3040 составляет модуль выбора нестабильности. Этап S3100 составляет модуль представления информации.
[0074] Функциональные преимущества
Как описано выше, в этом варианте осуществления, характерный количественный показатель (энтропия) одиночного распределения состояний движения надлежащим образом сохраняется, и нестабильное вождение определяется на основе их тенденции (варьирования и абсолютного значения).
В этом варианте осуществления, следующие преимущества могут быть получены в дополнение к преимуществам, описанным в первом варианте осуществления.
(1) Второй модуль определения нестабильности вождения вычисляет характерный количественный показатель распределения состояний движения для непосредственно предшествующего диапазона времени, указывающего текущее состояние движения, на основе данных состояний движения, полученных посредством модуля получения состояний движения, и оценивает степень нестабильности вождения на основе вычисленного характерного количественного показателя.
Посредством использования характерного количественного показателя распределения состояний движения водителя, можно выполнять статистический процесс и тем самым повышать точность.
[0075] (2) Второй модуль определения нестабильности вождения вычисляет тенденцию характерного количественного показателя на основе предыстории характерного количественного показателя, получаемой через каждый постоянный интервал, и оценивает степень нестабильности вождения на основе вычисленной тенденции.
Согласно этой конфигурации, посредством использования тенденции характерного количественного показателя, можно определять нестабильное вождение без использования распределения состояний движения для диапазона времени за долговременный период.
[0076] Четвертый вариант осуществления
Ниже описывается четвертый вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные с элементами первого варианта осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления. В четвертом варианте осуществления, другой процесс вычисления степени нестабильности, когда состояние обучения определяется как состояние незавершенного обучения, выполняется на основе значений относительной энтропии для различных диапазонов времени.
[0077] Ниже описывается процесс в модуле 100A представления информации согласно этому варианту осуществления в отношении блок-схемы последовательности операций способа по фиг. 12.
Процессы этапов S4010-S4060 являются идентичными процессам этапов S1010-S1060 в первом варианте осуществления. Процесс этапа S4100 является идентичным процессу этапа S1100. Соответственно, такие процессы не описываются повторно. Поскольку необязательно сохранять характерный количественный показатель в этом варианте осуществления, процесс этапа S1110 не выполняется.
[0078] Ниже описываются процессы этапов S4070 и S4090.
На этапе S4030 определяется состояние обучения, как описано выше.
Состояние обучения определяется с использованием времени движения, как описано выше. Степень SD обучения вычисляется, например, с использованием следующего выражения.
Степень SD обучения = время(-ена) движения/(диапазон времени * коэффициент)
Время движения: время после начала движения
Диапазон времени: диапазон времени (например, 2000 секунд) распределения состояний движения
Коэффициент: коэффициент (например, 5), ассоциированный со временем сходимости
[0079] На этапе S4070, модуль 100A представления информации задает диапазоны времени, в которых вычисляются два распределения ошибок при рулении (распределения состояний движения), в зависимости от степени SD обучения, вычисленной на этапе S4030. В этом варианте осуществления, два распределения состояний движения включают в себя долговременное распределение времени движения и кратковременное распределение времени движения. Диапазон времени долговременного распределения времени движения задается как диапазон времени на основе степени SD обучения, как описано ниже. Кратковременное распределение состояний движения вычисляется так, как описано выше.
[0080] Диапазон времени долговременного распределения времени движения = степень SD обучения * коэффициент обучения
Степень обучения: значение (от 0 до 1), вычисленное на этапе S4030
Коэффициент обучения: время обучения или значение, полученное посредством умножения времени обучения на предварительно определенный коэффициент (<1).
Коэффициент обучения получается, например, посредством умножения времени обучения (времени движения) на предварительно определенную константу в 1 или меньше.
[0081] На этапе S4080, модуль 100A представления информации вычисляет вторую разность распределений. Вычисление выполняется способами, идентичными способам на этапе S4050 (этап S1050). Здесь, диапазон времени для него отличается от диапазона времени распределения состояний движения для вычисления первой разности распределений. Диапазон времени второго распределения состояний движения меньше диапазонов времени первого распределения состояний движения.
[0082] Когда диапазоны времени первого распределения состояний движения задаются равными Tw_s1 и Tw_l1, и диапазоны времени второго первого распределения состояний движения задаются равными Tw_s2 и Tw_l2, эти значения задаются, например, следующим образом.
Tw_s1: 60 (с)
Tw_l1: 2000 (с)
Tw_s2: 20 (с)
Tw_l2: 600 (с)
[0083] На этапе S4080, модуль 100A представления информации подготавливает два распределения состояний движения и вычисляет разность между ними на их основе.
На этапе S4090, модуль 100A представления информации определяет состояние нестабильного вождения на основе разности (характерного количественного показателя), вычисленной на этапе S4080. На этапе S4090 этого варианта осуществления, модуль 100A представления информации сравнивает разность, вычисленную на этапе S4080, с предварительно определенным пороговым значением для определения. Затем, модуль 100A представления информации определяет то, что состояние вождения является нестабильным, когда разность превышает пороговое значение для определения. После этого, процесс переходит к этапу S4100.
[0084] Здесь, этап S4010 составляет модуль получения состояний движения. Этап S4050 составляет первый модуль вычисления распределений состояний движения и первый модуль определения нестабильности вождения. Этап S4030 составляет модуль определения завершения обучения. Этапы S4070-S4090 составляют второй модуль определения нестабильности вождения. Этап S4070 составляет второй модуль вычисления распределений состояний движения и второй модуль определения нестабильности вождения. Этап S4040 составляет модуль выбора нестабильности. Этап S4100 составляет модуль представления информации.
[0085] Функциональные преимущества
В этом варианте осуществления, когда состояние обучения определяется как состояние незавершенного обучения, модуль 100A представления информации вычисляет два значения относительной энтропии для различных диапазонов времени и изменяет диапазон времени одного значения относительной энтропии в зависимости от состояния обучения.
В этом варианте осуществления, следующие преимущества могут быть получены в дополнение к преимуществам первого варианта осуществления.
[0086] (1) Другие данные состояний движения, используемые во втором модуле определения нестабильности вождения, являются данными состояний движения, полученными в другом диапазоне времени, отличающемся от непосредственно предшествующего диапазона времени. Другой диапазон времени изменяется в зависимости от степени обучения в качестве отношения времени, истекшего от начала сбора данных состояний движения до настоящего времени, ко времени обучения, и другой диапазон времени увеличивается с увеличением степени обучения.
За счет принудительного увеличения такого другого диапазона времени по мере того, как он приближается к завершению обучения, можно еще более плавно изменять информацию, которая должна быть представлена водителю, когда незавершение обучения переходит в завершение обучения. Например, можно еще более плавно изменять привлечение внимания, когда незавершение обучения переходит в завершение обучения.
[0087] Пятый вариант осуществления
Ниже описывается пятый вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные с элементами первого варианта осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления. В пятом варианте осуществления другой процесс вычисления степени нестабильности, когда состояние обучения определяется как состояние незавершенного обучения, выполняется на основе характерных количественных показателей (относительной энтропии) двух одиночных распределений.
Конфигурация системы этого варианта осуществления показывается на фиг. 13. Как показано на фиг. 13, выводы датчика рабочей величины нажатия педали тормоза и устройства определения помех вводятся в модуль 100A представления информации в дополнение к выводам датчика 3 угла поворота при рулении и таймера 50.
[0088] Ниже описывается процесс модуля 100A представления информации согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 14.
Во-первых, на этапе S5010, модуль 100A представления информации получает следующие данные в качестве информационных данных касательно транспортного средства.
Модуль 100A представления информации получает угол поворота при рулении и рабочую величину нажатия педали тормоза в качестве информации касательно операции водителя на основе выводов из датчика 3 угла поворота при рулении и датчика 2 рабочей величины нажатия педали тормоза.
Модуль 100A представления информации получает скорость транспортного средства транспортного средства, продольной составляющей G, поперечной составляющей G, относительной скорости по сравнению с впереди идущей помехой и расстояния между транспортными средствами в качестве информации состояния транспортного средства на основе выводов датчика 4 скорости транспортного средства, G-датчика 8 и устройства 9 определения едущих впереди транспортных средств.
[0089] На этапе S5030, модуль 100A представления информации определяет состояние обучения посредством процесса, идентичного процессу на этапе S1050.
На этапе S5040, модуль 100A представления информации определяет то, является или нет состояние обучения состоянием завершенного обучения, на основе степени SD обучения посредством процесса, идентичного процессу на этапе S1040. Когда состояние обучения определяется как состояние завершенного обучения, процесс переходит к этапу S5050. С другой стороны, когда состояние обучения определяется как состояние незавершенного обучения, процесс переходит к этапам S5080 и S5100.
[0090] На этапах S5050 и S5060 выполняются процессы, идентичные процессам на этапах S1050 и S1060. Иными словами, на этапе S5050 вычисляется значение разности между распределениями. На этапе S5060, вычисленное значение разности сравнивается с предварительно определенным пороговым значением для определения, и определяется то, является или нет состояние вождения нестабильным.
На этапе S5070, модуль 100A представления информации выполняет процесс представления информации, когда на этапе S5060 определено то, что состояние вождения является нестабильным.
[0091] С другой стороны, на этапе S5080, модуль 100A представления информации вычисляет значение энтропии руления с использованием угла поворота при рулении. На этапе S5080, значение абсолютной энтропии (характерный количественный показатель) в качестве значения нестабильности вычисляется на основе одиночного распределения состояний движения. После этого, процесс переходит к этапу S5090.
На этапе S5090, модуль 100A представления информации выполняет процесс, идентичный процессу на этапе S2080, и считывает характерные количественные показатели среднестатистических водителей, сохраненные в модуле хранения. После этого, процесс переходит к этапу S5120.
[0092] На этапе S5100, модуль 100A представления информации вычисляет значение абсолютной энтропии (характерный количественный показатель) в качестве значения нестабильности на основе абсолютной величины TTC (времени до столкновения) во время торможения. После этого, процесс переходит к этапу S5110. Здесь, время до столкновения (TTC) представляет время до столкновения с помехой, когда транспортное средство движется с поддержанием состояния движения во время вычисления времени до столкновения.
[0093] Когда состояние водителя является нестабильным, общеизвестно, что время начала торможения задерживается. Следовательно, можно определять нестабильное состояние посредством оценки времени торможения. Время торможения используется после нормализации посредством использования статистических данных общей операции торможения.
Например, когда число операций торможения составляет N, предполагается, что TTC во время торможения задается как TTC1, TTC2, .... Когда среднее значение общего времени торможения задается как µ, а его среднеквадратическое отклонение задается как σ, нормализованные значения Std операций торможения могут выражаться следующим образом.
[0094] Std1=(µ-TTC1)/σ
Std2=(µ-TTC2)/σ
Std3=(µ-TTC3)/σ
...
Stdn=(µ-TTCn)/σ
Среднее Std (ΣStdn (где n является значением 1-n)/N) используется в качестве степени нестабильности.
[0095] На этапе S5110, модуль 100A представления информации считывает среднее значение TTC (значение, предварительно заданное в модуле хранения), которое, в общем, является допустимым. Это значение задается равным, например, значению между 2 и 3.
На этапе S5120, модуль 100A представления информации определяет то, что состояние вождения является нестабильным, когда любая из нестабильности первого одиночного распределения с использованием характерного количественного показателя на основе процессов этапа S5080 и S5090 и нестабильности второго одиночного распределения с использованием характерного количественного показателя на основе процессов этапов S5100 и S5110 удовлетворяет следующим условным выражениям. Когда удовлетворяются следующие условные выражения, определяется то, что состояние вождения является нестабильным.
[0096] Степень нестабильности, вычисленная на этапе S5080 > общий характерный количественный показатель, считываемый на этапе S5090
Степень нестабильности, вычисленная на этапе S5100 > общий характерный количественный показатель, считываемый на этапе S5110
На этапах S5080 и S5100 этого варианта осуществления, соответственно, проиллюстрированы случаи, в которых степень нестабильности вычисляется на основе энтропии руления и TTC во время торможения. Вместо этого, может быть использовано любое из операции вождения водителя и индекса поведения транспортного средства (помимо этого, частотное распределение поперечной составляющей G и продольной составляющей G) вследствие операции вождения.
[0097] На этапе S5130, когда на этапе S5120 определено то, что состояние вождения является нестабильным, модуль 100A представления информации выполняет процесс представления информации.
Другие конфигурации являются идентичными конфигурации в первом варианте осуществления.
Здесь, этап S5010 составляет модуль получения состояний движения. Этап S5050 составляет первый модуль вычисления распределений состояний движения и первый модуль определения нестабильности вождения. Этап S5030 составляет модуль определения завершения обучения. Этапы S5080 и S5120 составляют второй модуль определения нестабильности вождения. Этап S5040 составляет модуль выбора нестабильности. Этапы S5070 и S5130 составляют модуль представления информации.
[0098] Функциональные преимущества
В этом варианте осуществления, степень нестабильности определяется с учетом других индексов (таких как поперечная составляющая G при правом или левом повороте) в дополнение к энтропии руления. Иными словами, используются два типа одиночных распределений состояний движения (которые вычисляются из различных индексов, соответственно), и определяется то, что состояние вождения является нестабильным, когда определяется то, что любое из них является нестабильным.
[0099] В этом варианте осуществления, следующие преимущества могут быть получены в дополнение к преимуществам, описанным в первом варианте осуществления.
(1) Другие данные состояний движения, используемые во втором модуле определения нестабильности вождения, представляют собой множественные типы данных состояний движения. Второй модуль определения нестабильности вождения оценивает каждое из множественных распределений состояний движения на основе множественных типов из данных состояний движения в качестве сравнительных распределений состояний движения, соответственно. Иными словами, второй модуль определения нестабильности вождения оценивает степень нестабильности вождения из характерных количественных показателей множественных распределений состояний движения, полученных из множественных типов данных состояний движения.
Посредством определения состояния водителя из множественных сигналов, а также специальных сигналов, можно повышать эффективность определения.
(2) Второй модуль определения нестабильности вождения оценивает степень нестабильности вождения с использованием времени до столкновения (TTC).
Посредством использования времени до столкновения, можно точно определять состояние операции замедления.
[0100] Шестой вариант осуществления
Ниже описывается шестой вариант осуществления со ссылкой на прилагаемые чертежи. Элементы, идентичные с элементами первого варианта осуществления, обозначаются посредством идентичных ссылок с номерами.
Базовая конфигурация этого варианта осуществления является идентичной базовой конфигурации в первом варианте осуществления. В шестом варианте осуществления другой процесс вычисления степени нестабильности, когда состояние обучения определяется как состояние незавершенного обучения, выполняется посредством вычисления характерного количественного показателя конкретного сценария вождения.
Фиг. 15 является схемой, иллюстрирующей конфигурацию системы согласно этому варианту осуществления. В этом варианте осуществления, информация по перекрестку получается с помощью сигнала указания поворота или навигационной системы таким образом, чтобы определять конкретный сценарий вождения.
[0101] Ниже описывается процесс модуля 100A представления информации согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 16.
На этапе S6010, следующие данные получаются в качестве информационных данных касательно транспортного средства, которые представляют собой информацию относительно операции вождения водителя и состояния транспортного средства вследствие операции вождения.
Угол поворота при рулении, степень открытия педали акселератора, рабочая величина нажатия педали тормоза и сигнал указания поворота получаются в качестве информации относительно операции вождения водителя. Сигнал указания поворота используется в качестве информации для определения сценария вождения.
[0102] Скорость транспортного средства, продольная составляющая G и поперечная составляющая G определяются в качестве информации состояния транспортного средства.
На этапе S6030, модуль 100A представления информации получает информацию по перекрестку в качестве информации окружающей обстановки дорожного движения через навигационную систему 7.
На этапе S6030, модуль 100A представления информации определяет состояние обучения посредством процесса, идентичного процессу на этапе S1030.
[0103] На этапе S6040, модуль 100A представления информации определяет то, является или нет состояние обучения состоянием завершенного обучения, на основе степени SD обучения посредством процесса, идентичного процессу на этапе S1040. Когда состояние обучения определяется как состояние завершенного обучения, процесс переходит к этапу S6050. С другой стороны, когда состояние обучения определяется как состояние незавершенного обучения, процесс переходит к этапу S6070.
На этапе S6050, модуль 100A представления информации вычисляет значение разности между распределениями посредством процесса, идентичного процессу на этапе S1050. На этапе S6060, состояние нестабильного вождения определяется на основе значения разности посредством процесса, идентичного процессу на этапе S1060. После этого, процесс переходит к этапу S6100.
[0104] С другой стороны, на этапе S6070, модуль 100A представления информации определяет сценарий вождения (окружающую обстановку дорожного движения). Сценарий правого или левого поворота на перекрестке, сценарий приближения к движущемуся впереди транспортному средству и т.п. может рассматриваться как сценарий вождения, и сценарий для правого или левого поворота на перекрестке иллюстрируется.
То, является либо нет сценарий вождения сценарием правого или левого поворота на перекрестке, можно определять посредством использования способа определения перекрестка на навигационной карте или процесса определения перекрестка на основе указателя поворота или поведения транспортного средства.
[0105] На этапе S6080, модуль 100A представления информации вычисляет характерный количественный показатель. Способ, идентичный процессу на этапе S5100 пятого варианта осуществления, используется для того, чтобы вычислять характерный количественный показатель на этапе S6080. Иными словами, характерный количественный показатель вычисляется посредством применения абсолютной величины поперечной составляющей G вместо операции торможения к процессу этапа S5100.
На этапе S6090, модуль 100A представления информации сравнивает характерный количественный показатель, вычисленный на этапе S6080, с предварительно определенным пороговым значением для определения и определяет то, что состояние вождения является нестабильным, когда характерный количественный показатель превышает пороговое значение для определения.
[0106] Пороговое значение для определения изменяется в зависимости от определенного сценария вождения. Например, когда определенный сценарий вождения является сценарием правого или левого поворота на перекрестке, пороговое значение для определения задается ниже пороговых значений для других сценариев вождения.
На этапе S6100, аналогично этапу S1100, процесс представления информации выполняется, когда на этапе S6060 или S6090 определено то, что состояние вождения является нестабильным.
[0107] Здесь, сценарий для правого или левого поворота на перекрестке иллюстрируется в качестве сценария вождения, но может быть использован сценарий приближения к движущемуся впереди транспортному средству и т.п. В этом случае, на этапе S6070 определяется то, приближается или нет транспортное средство к движущемуся впереди транспортному средству. Например, когда расстояние до движущегося впереди транспортного средства равно или меньше предварительно определенного расстояния, определяется то, что сценарий вождения является сценарием приближения к движущемуся впереди транспортному средству. На этапе S6080, выполняется процесс, идентичный процессу этапа S5100. На этапе S6090, пороговое значение для определения задается ниже пороговых значений других сценариев вождения, когда определяется то, что сценарий вождения является сценарием приближения к движущемуся впереди транспортному средству.
[0108] Здесь, этапы S6010 и S6020 составляют модуль получения состояний движения. Этап S6050 составляет первый модуль вычисления распределений состояний движения и первый модуль определения нестабильности вождения. Этап S6030 составляет модуль определения завершения обучения. Этапы S6070-S6090 составляют второй модуль определения нестабильности вождения. Этап S6040 составляет модуль выбора нестабильности. Этап S6100 составляет модуль представления информации.
[0109] Функциональные преимущества
В этом варианте осуществления, определяется сценарий вождения, а затем вычисляется характерный количественный показатель в конкретном сценарии вождения. Нестабильное состояние определяется на основе характерного количественного показателя в конкретном сценарии вождения (к примеру, в сценарии правого или левого поворота на перекрестке или в сценарии замедления относительно движущегося впереди транспортного средства).
В этом варианте осуществления, следующие преимущества могут быть получены в дополнение к преимуществам первого варианта осуществления.
[0110] (1) Второй модуль определения нестабильности вождения включает в себя модуль определения сценария вождения, который определяет конкретный сценарий вождения и оценивает степень нестабильности посредством вычисления характерного количественного показателя на основе данных операции вождения для конкретного сценария вождения, определенного посредством модуля определения сценария вождения.
Посредством указания сценария вождения, можно легко выявлять небольшое варьирование в операции вождения, возникающее в нестабильном состоянии.
[0111] (2) Сценарий правого или левого поворота на перекрестке определяется в качестве конкретного сценария вождения, характерный количественный показатель вычисляется из характеристики вождения в это время, и степень нестабильности оценивается.
Можно точно определять состояние водителя с использованием характеристик вождения сценария правого или левого поворота на перекрестке.
(3) Характеристики вождения в сценарии правого или левого поворота используют абсолютную величину поперечной составляющей G.
Можно точно определять состояние поведения на перекрестке с использованием поперечной составляющей G.
[0112] (4) Сценарий приближения к движущемуся впереди транспортному средству определяется в качестве конкретного сценария вождения, характерный количественный показатель вычисляется из характеристики вождения при операции замедления в это время, и степень нестабильности оценивается.
Посредством определения характеристики операции замедления для сценария приближения к движущемуся впереди транспортному средству, можно точно определять состояние водителя.
(5) Характеристики вождения при операции замедления используют абсолютную величину TTC (времени до столкновения) во время торможения.
Посредством использования времени до столкновения, можно точно определять состояние водителя в сценарии приближения к движущемуся впереди транспортному средству.
[0113] Данная заявка притязает на приоритет заявки на патент (Япония) номер 2011-94343, поданной 20 апреля 2011 года, содержимое которой полностью содержится в данном документе по ссылке.
Хотя настоящее изобретение описано в отношении точного числа вариантов осуществления, объем настоящего изобретения не ограничен этим, и улучшения и модификации вариантов осуществления на основе вышеописанного раскрытия сущности являются очевидными для специалистов в данной области техники.
СПИСОК НОМЕРОВ ССЫЛОК
[0114] SD - степень обучения
TTC - время до столкновения
1 - датчик степени открытия педали акселератора
2 - датчик рабочей величины нажатия педали тормоза
3 - датчик угла поворота при рулении
4 - датчик скорости транспортного средства
5 - датчик определения состояния указателя поворота
6 - приборная панель
7 - навигационная система
8 - G-датчик
9 - устройство определения едущих впереди транспортных средств
10 - динамик
50 - таймер
100 - контроллер
100A - модуль представления информации
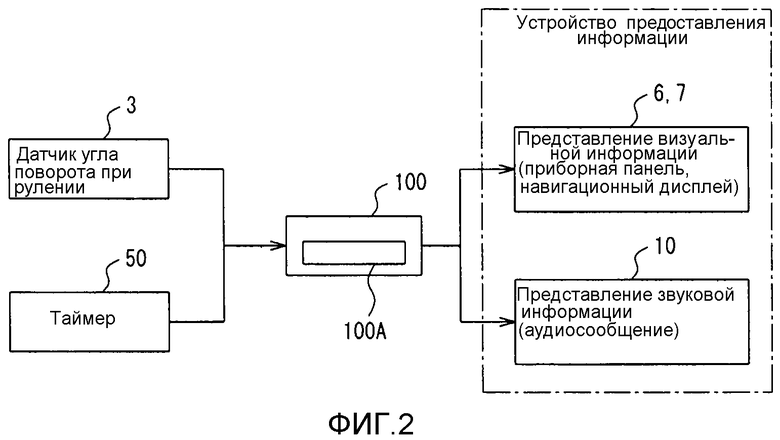
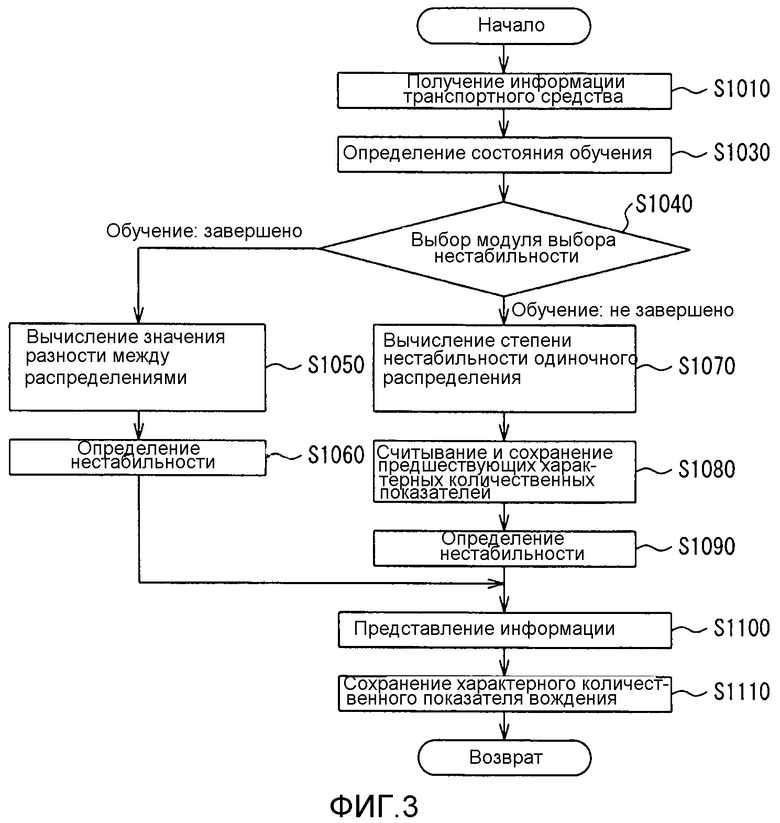
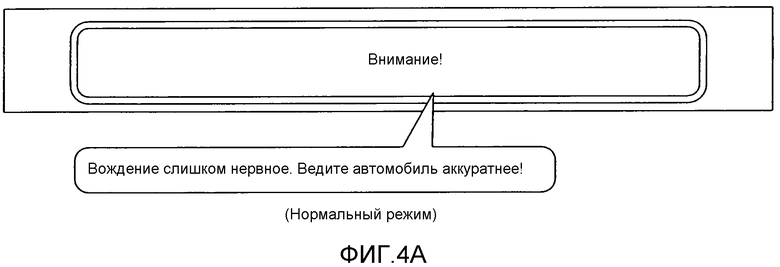
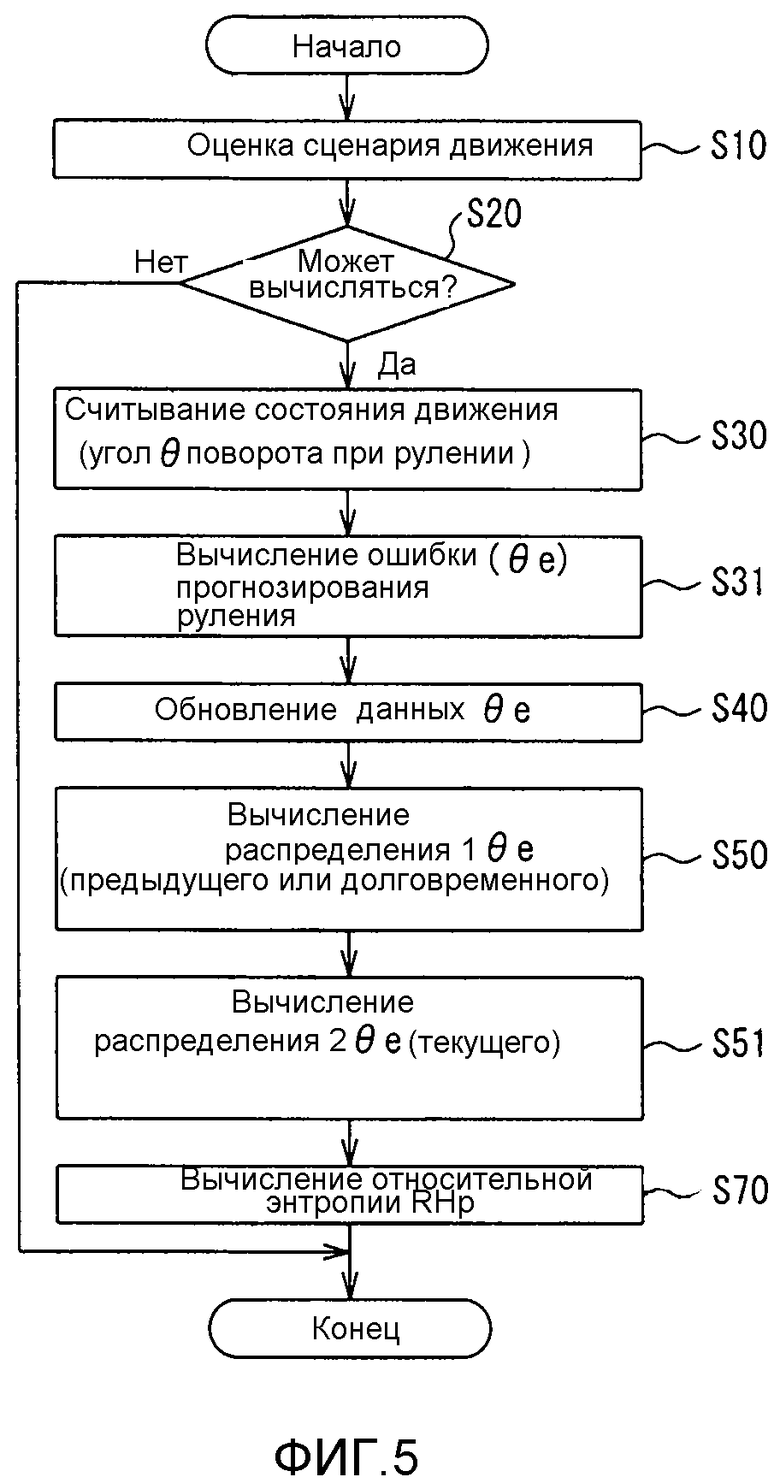
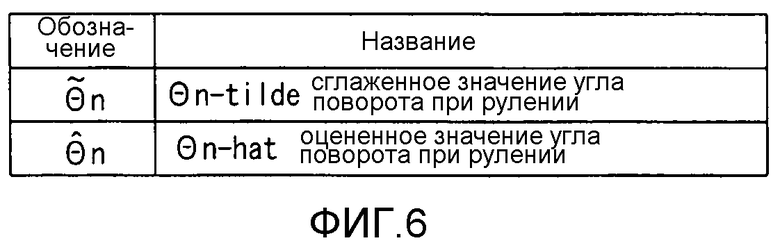
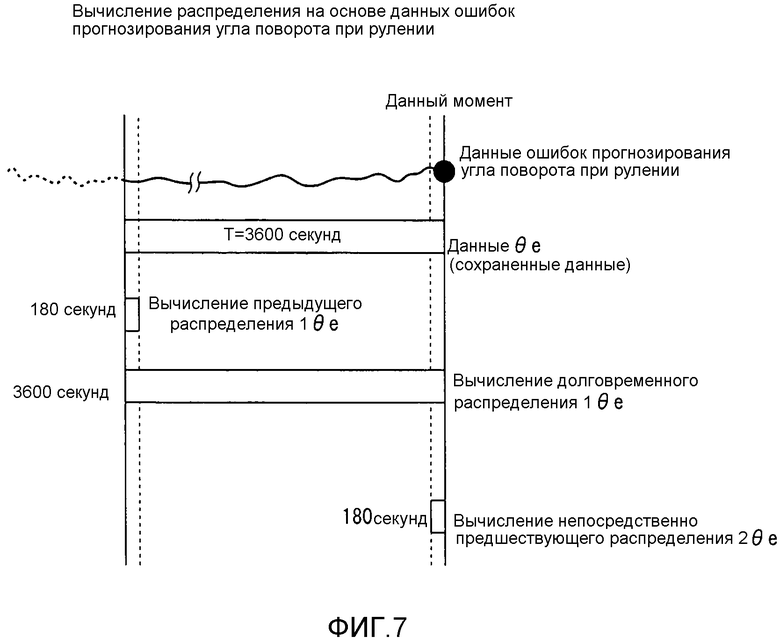

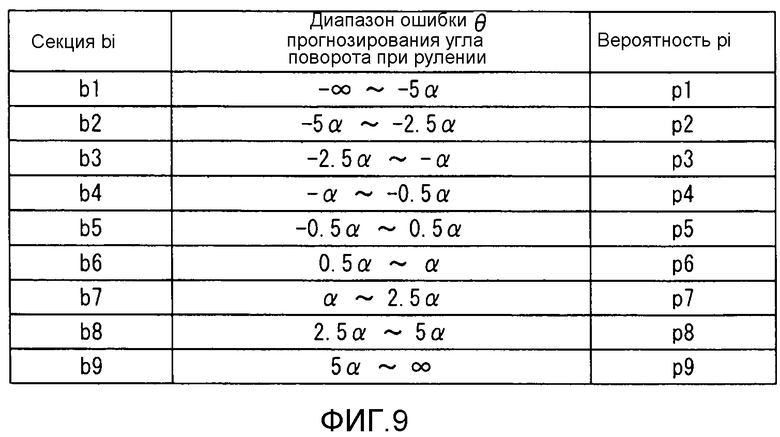
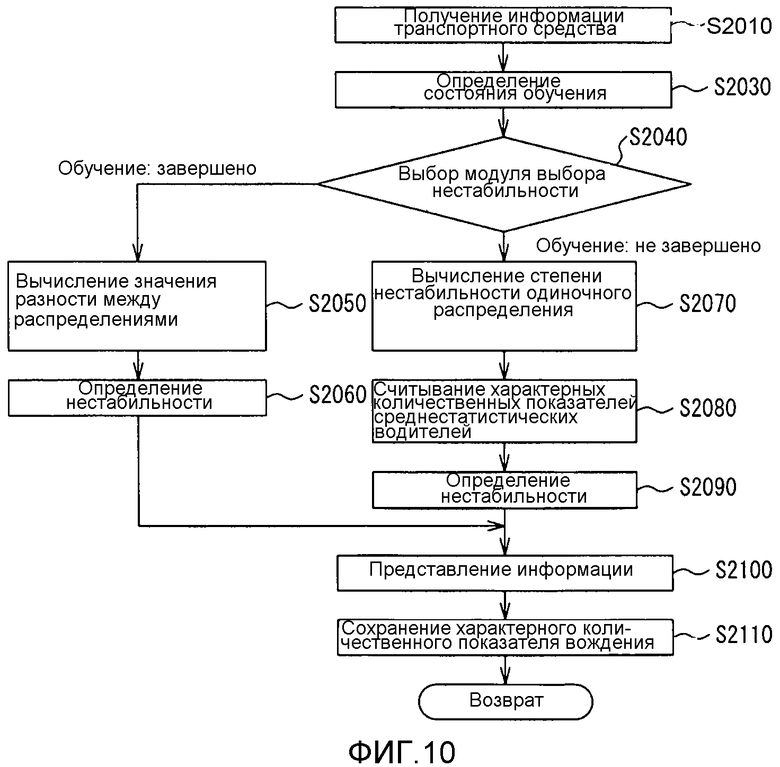
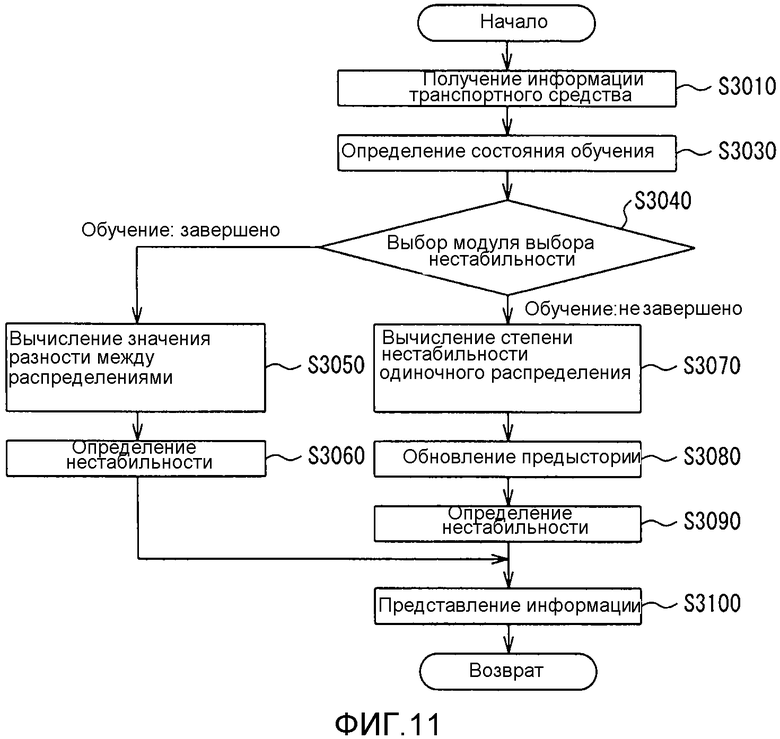
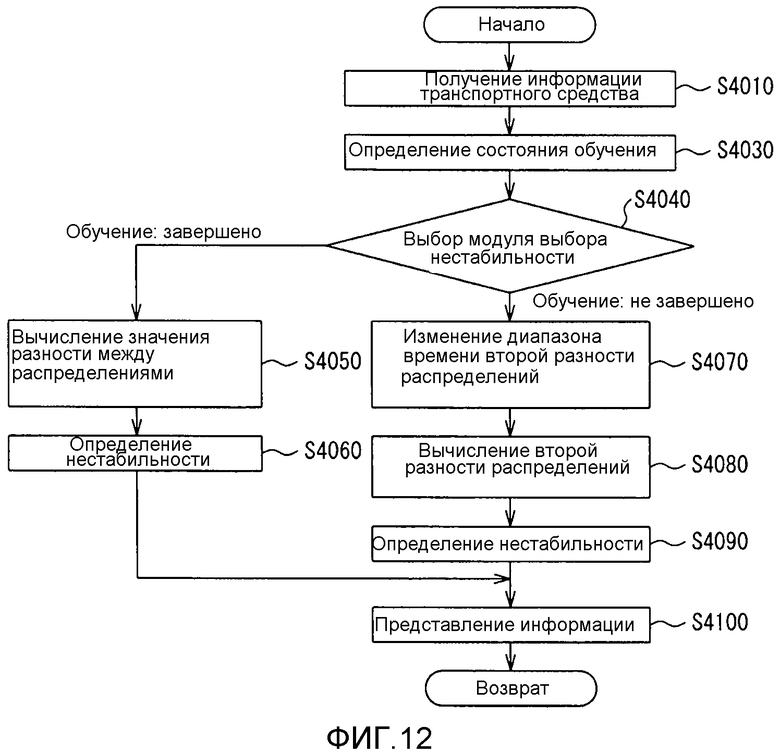
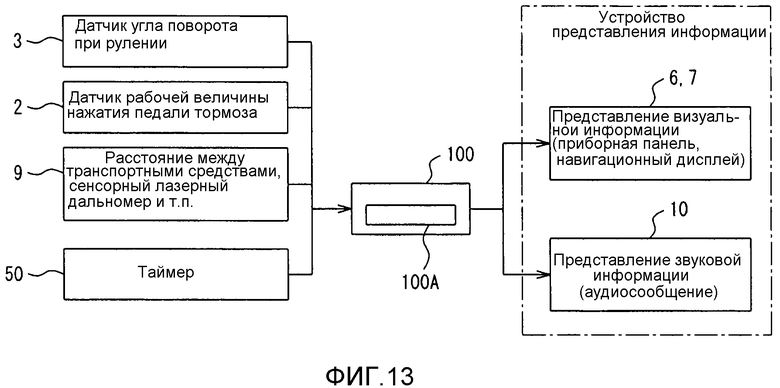
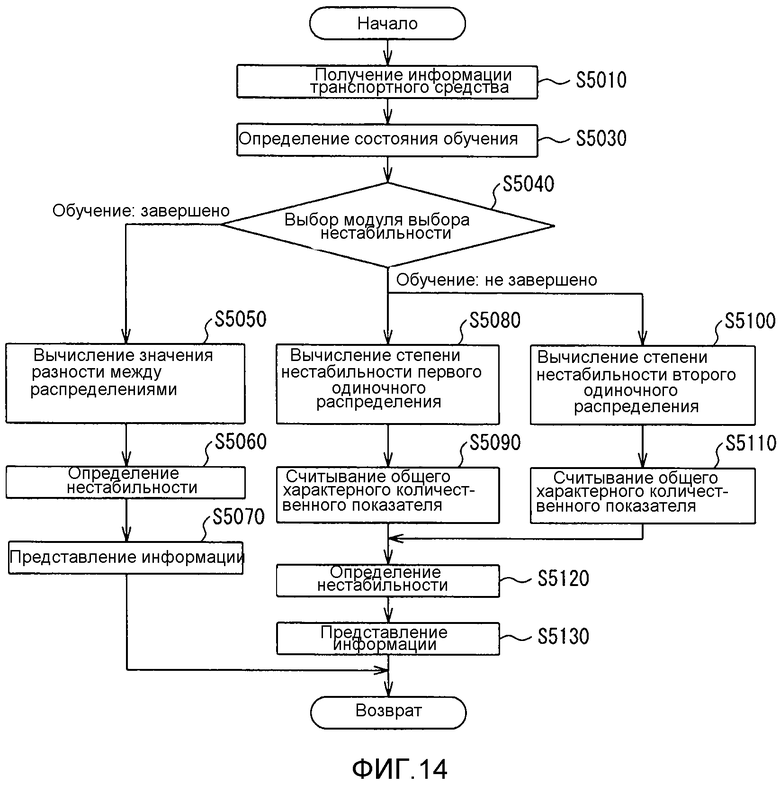
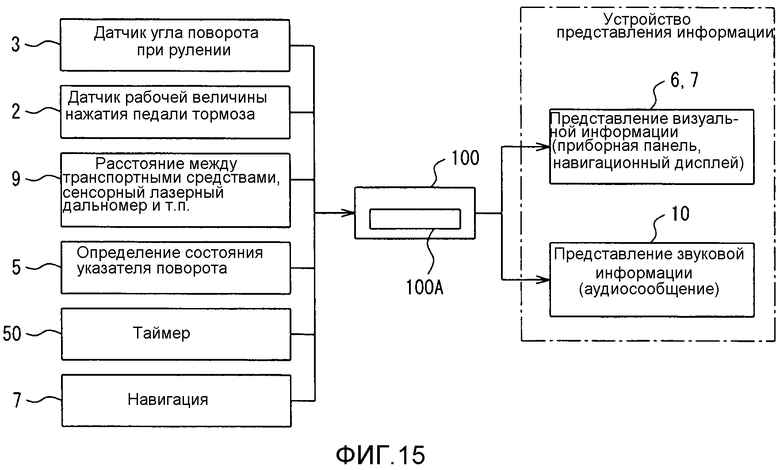
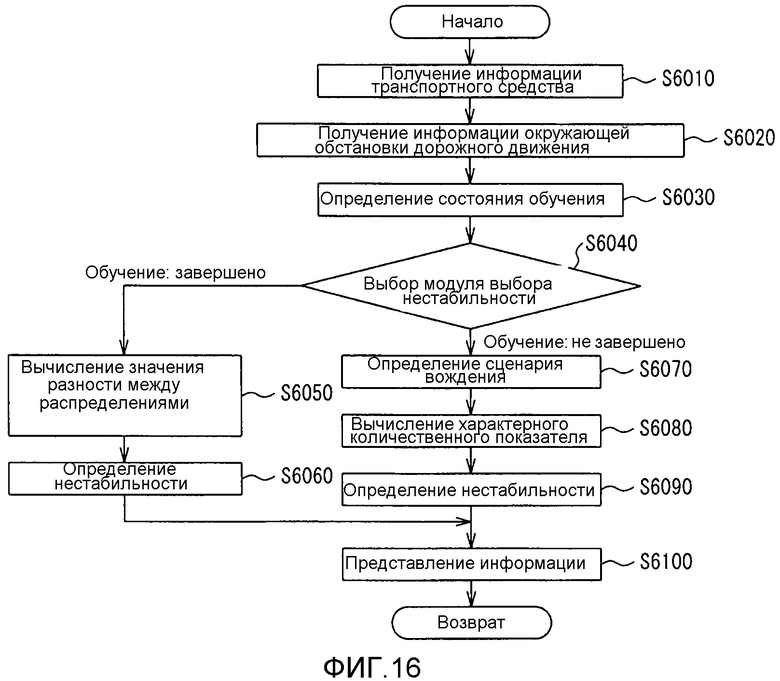
Изобретение относится к технологии представления состояния вождения водителю. Устройство предоставления информации для использования в транспортном средстве содержит модуль получения состояний движения; первый модуль вычисления распределений состояний движения; первый модуль определения нестабильности вождения; модуль определения завершения обучения; второй модуль определения нестабильности вождения; модуль выбора нестабильности и модуль представления информации водителю. Данные состояний движения являются данными, полученными в диапазоне времени, отличающемся от непосредственно предшествующего диапазона времени. Другой диапазон времени изменяется в зависимости от степени обучения, которая является отношением истекшего времени от начала сбора данных состояний движения до настоящего времени ко времени обучения, при этом диапазон времени задается таким образом, что он становится больше с увеличением степени обучения. В другом варианте устройство дополнительно содержит модуль определения сценария вождения. Достигается расширение функциональных возможностей. 2 н. и 15 з.п. ф-лы, 16 ил.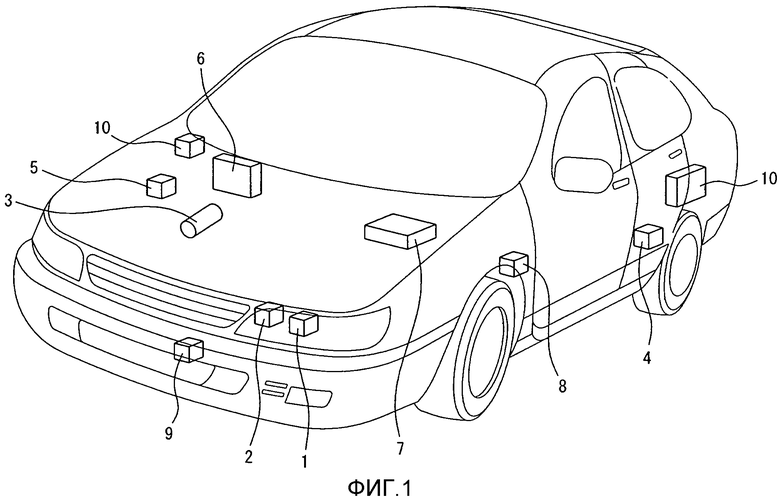
1. Устройство предоставления информации для использования в транспортном средстве, содержащее:
- модуль получения состояний движения для получения данных состояний движения, включающих в себя, по меньшей мере, одно из операции вождения водителя и состояния транспортного средства;
- первый модуль вычисления распределений состояний движения для вычисления множества распределений состояний движения, включающих в себя распределение состояний движения для непосредственно предшествующего диапазона времени, указывающее текущее состояние движения, и распределение состояний движения для диапазона времени, отличающегося от непосредственно предшествующего диапазона времени, на основе данных состояний движения, получаемых посредством модуля получения состояний движения;
- первый модуль определения нестабильности вождения для оценки первой нестабильности вождения на основе значения разности между множеством распределений состояний движения, вычисленных посредством первого модуля вычисления распределений состояний движения;
- модуль определения завершения обучения для определения того, что обучение завершено, когда предварительно определенное время обучения истекает от начала сбора данных состояний движения;
- второй модуль определения нестабильности вождения для оценки второй нестабильности вождения посредством сравнения
распределения состояний движения для непосредственно предшествующего диапазона времени, которое указывает текущее состояние движения и которое вычисляется на основе данных состояний движения, полученных посредством модуля получения состояний движения, со сравнительным распределением состояний движения, полученным на основе других данных состояний движения, отличающихся от данных состояний движения для непосредственно предшествующего диапазона времени;
- модуль выбора нестабильности для выбора первой нестабильности вождения, когда обучение завершено, и выбора второй нестабильности вождения, когда обучение не завершено, на основе результата определения модуля определения завершения обучения; и
- модуль представления информации для представления информации нестабильности на основе нестабильности, выбранной посредством модуля выбора нестабильности между первой нестабильностью вождения и второй нестабильностью вождения, водителю,
при этом другие данные состояний движения являются данными состояний движения, полученными в другом диапазоне времени, отличающемся от непосредственно предшествующего диапазона времени, и
при этом другой диапазон времени изменяется в зависимости от степени обучения, которая является отношением истекшего времени от начала сбора данных состояний движения до настоящего времени ко времени обучения, и другой диапазон времени задается таким образом, что он становится больше с увеличением степениобучения.
2. Устройство предоставления информации для использования в транспортном средстве по п. 1, в котором другие данные состояний движения представляют собой множество типов данных состояний движения и
в котором второй модуль определения нестабильности вождения вычисляет множество распределений состояний движения в качестве сравнительного распределения состояний движения на основе множества данных состояний движения.
3. Устройство предоставления информации для использования в транспортном средстве по п. 1 или 2, в котором распределение состояний движения вычисляется на основе рабочей величины операции руления.
4. Устройство предоставления информации для использования в транспортном средстве по п. 3, в котором способ на основе энтропии руления используется при вычислении на основе рабочей величины операции руления.
5. Устройство предоставления информации для использования в транспортном средстве по п. 1 или 2, в котором второй модуль определения нестабильности вождения оценивает вторую нестабильность вождения с использованием времени до столкновения (TTC).
6. Устройство предоставления информации для использования в транспортном средстве по п. 1 или 2, в котором модуль представления информации изменяет информацию нестабильности, которая должна быть представлена, в зависимости от того, завершено ли или нет обучение.
7. Устройство предоставления информации для использования в транспортном средстве, содержащее:
- модуль получения состояний движения для получения данных состояний движения, включающих в себя, по меньшей мере, одно из операции вождения водителя и состояния транспортного средства;
- первый модуль вычисления распределений состояний движения для вычисления множества распределений состояний движения, включающих в себя распределение состояний движения для непосредственно предшествующего диапазона времени, указывающее текущее состояние движения, и распределение состояний движения для диапазона времени, отличающегося от непосредственно предшествующего диапазона времени, на основе данных состояний движения, получаемых посредством модуля получения состояний движения;
- первый модуль определения нестабильности вождения для оценки первой нестабильности вождения на основе значения разности между множеством распределений состояний движения, вычисленных посредством первого модуля вычисления распределений состояний движения;
- модуль определения завершения обучения для определения того, что обучение завершено, когда предварительно определенное время обучения истекает от начала сбора данных состояний движения;
- модуль определения сценария вождения для определения того, является ли сценарий вождения конкретным сценарием вождения, предварительно заданным для использования, когда обучение не завершено, когда определяется то, что обучение не завершено, на
основе результата определения модуля определения завершения обучения;
- второй модуль определения нестабильности вождения для вычисления, когда определяется то, что обучение не завершено, на основе результата определения модуля определения завершения обучения, и модуль определения сценария вождения определяет конкретный сценарий вождения, характерного количественного показателя распределения состояний движения для непосредственно предшествующего диапазона времени, которое указывает текущее состояние движения, на основе данных состояний движения, полученных посредством модуля получения состояний движения в конкретном сценарии вождения, определенном посредством модуля определения сценария вождения, и оценки второй нестабильности вождения на основе вычисленного характерного количественного показателя;
- модуль выбора нестабильности для выбора первой нестабильности вождения, когда обучение завершено, и выбора второй нестабильности вождения, когда обучение не завершено, на основе результата определения модуля определения завершения обучения; и
- модуль представления информации для представления информации нестабильности на основе нестабильности, выбранной посредством модуля выбора нестабильности между первой нестабильностью вождения и второй нестабильностью вождения, водителю.
8. Устройство предоставления информации для использования в транспортном средстве по п. 7, в котором второй модуль
определения нестабильности вождения вычисляет тенденцию характерного количественного показателя на основе предыстории характерного количественного показателя, полученной с постоянным интервалом, и оценивает вторую нестабильность вождения на основе вычисленной тенденции.
9. Устройство предоставления информации для использования в транспортном средстве по п. 7 или 8, в котором правый или левый поворот на перекрестке определяется в качестве конкретного сценария вождения и характерный количественный показатель вычисляется из характеристики вождения в это время.
10. Устройство предоставления информации для использования в транспортном средстве по п. 9, в котором абсолютная величина поперечной составляющей G используется в качестве характеристики вождения для правого или левого поворота.
11. Устройство предоставления информации для использования в транспортном средстве по п. 7 или 8, в котором сценарий приближения к движущемуся впереди транспортному средству определяется в качестве конкретного сценария вождения и характерный количественный показатель вычисляется из характеристики вождения при операции замедления в это время.
12. Устройство предоставления информации для использования в транспортном средстве по п. 11, в котором абсолютная величина времени до столкновения (TTC) во время торможения используется в качестве характеристики вождения при операции замедления.
13. Устройство предоставления информации для использования в транспортном средстве по п. 7 или 8, в котором второй модуль определения нестабильности вождения определяет то, что состояние
вождения является нестабильным, когда вычисленный характерный количественный показатель превышает предварительно определенное пороговое значение для определения.
14. Устройство предоставления информации для использования в транспортном средстве по п. 7 или 8, в котором распределение состояний движения вычисляется на основе рабочей величины операции руления.
15. Устройство предоставления информации для использования в транспортном средстве по п. 14, в котором способ на основе энтропии руления используется при вычислении на основе рабочей величины операции руления.
16. Устройство предоставления информации для использования в транспортном средстве по п. 7 или 8, в котором второй модуль определения нестабильности вождения оценивает вторую нестабильность вождения с использованием времени до столкновения (TTC).
17. Устройство предоставления информации для использования в транспортном средстве по п. 7 или 8, в котором модуль представления информации изменяет информацию нестабильности, которая должна быть представлена, в зависимости от того, завершено ли или нет обучение.
| JP 2007026271 A, 01.02.2007 | |||
| JP 2009009495 A, 15.01.2009 | |||
| JP 2010198120 A, 09.09.2010 | |||
| WO 2009013815 A1, 29.01.2009 |

