Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и к устройству управления движением.
Уровень техники
[0002] Традиционно, известно устройство, которое выполняет автоматическое руление для приложения крутящего момента поворота при рулении и т.п. к системе передачи силы поворота при рулении, чтобы инструктировать рассматриваемому транспортному средству придерживаться полосы движения впереди относительно транспортного средства (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Выложенная патентная публикация Японии номер 2001-039325
Сущность изобретения
Техническая задача
[0004] Тем не менее, если величина нормального управления применяется к системе передачи силы поворота при рулении сразу после переключения с ручного руления в автоматическое руление, возникает такая проблема, что управление рулением резко начинается, что вызывает ощущение дискомфорта у водителя.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы, и цель настоящего изобретения заключается в том, чтобы предоставлять способ управления движением и устройство управления движением, которые уменьшают ощущение дискомфорта, вызываемое у водителя, когда управление поперечной позицией транспортного средства начинается.
Решение задачи
[0006] Способ управления движением согласно аспекту настоящего изобретения представляет собой способ устройства управления движением, которое может переключаться между режимом автоматического вождения, в котором движение рассматриваемого транспортного средства управляется для того, чтобы определять поперечную позицию рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительной линии полосы движения, в которой движется рассматриваемое транспортное средство, или относительно едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства в полосе движения, и режимом вождения вручную, в котором движение рассматриваемого транспортного средства не управляется, при этом способ содержит:
когда переключение с режима вождения вручную на режим автоматического вождения выполняется:
вычисление целевого значения угла поворота при рулении, требуемого для того, чтобы определять поперечную позицию рассматриваемого транспортного средства относительно разделительной линии в предварительно определенной позиции;
вычисление целевого значения крутящего момента поворота при рулении, требуемого для того, чтобы инструктировать фактическому углу поворота при рулении совпадать с целевым значением угла поворота при рулении;
регулирование усиления, на которое должно умножаться целевое значение крутящего момента поворота при рулении, чтобы регулировать фактический крутящий момент поворота при рулении; и
увеличение усиления согласно истекшему времени от переключения на режим автоматического вождения.
Преимущества изобретения
[0007] Согласно настоящему изобретению, можно предоставлять способ управления движением и устройство управления движением, которые уменьшают ощущение дискомфорта, вызываемое у водителя, когда управление поперечной позицией транспортного средства начинается.
Краткое описание чертежей
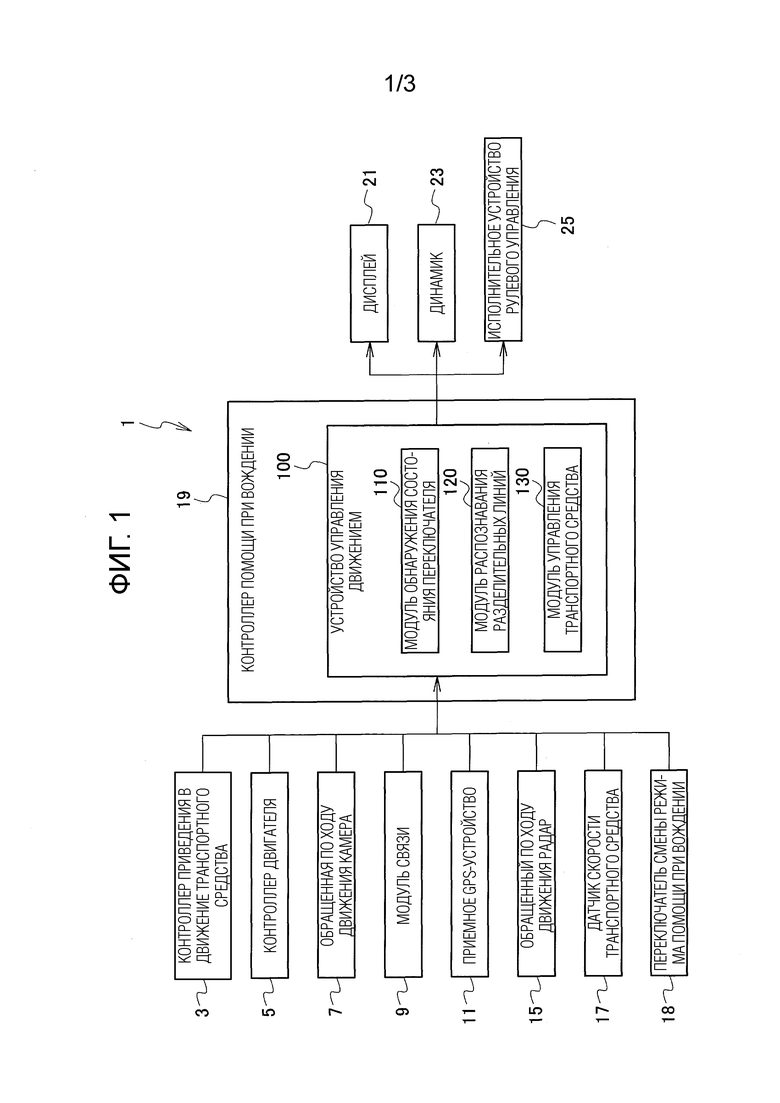
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы 1 управления движением согласно варианту осуществления настоящего изобретения.
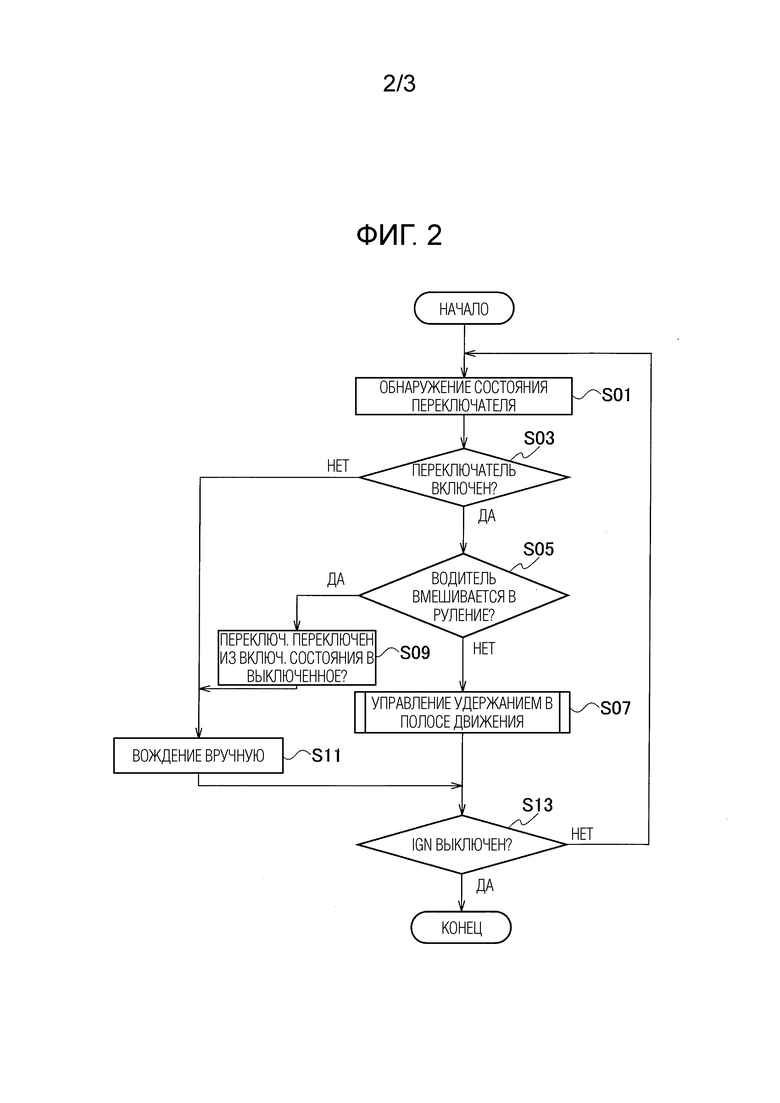
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример операции обработки устройства 100 управления движением на фиг. 1.
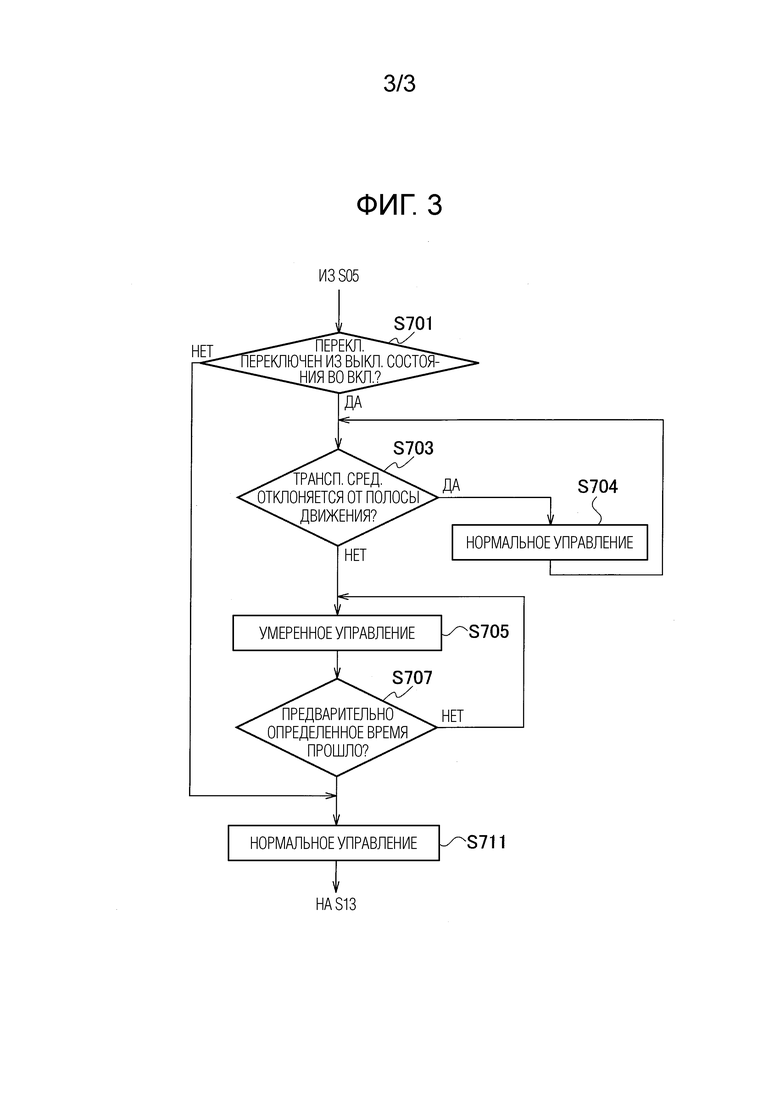
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей подробную процедуру управления удержанием в полосе движения (этап S07) на фиг. 2.
Подробное описание вариантов осуществления
[0009] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. В описаниях чертежей, аналогичные части обозначаются посредством аналогичных ссылок с номерами, и их лишние пояснения опускаются.
[0010] В дальнейшем описывается конфигурация системы 1 управления движением согласно варианту осуществления настоящего изобретения со ссылкой на фиг. 1. Система 1 управления движением включает в себя контроллер 3 приведения в движение транспортного средства, контроллер 5 двигателя, обращенную по ходу движения камеру 7, модуль 9 связи, приемное GPS-устройство 11, обращенный по ходу движения радар 15, датчик 17 скорости транспортного средства и переключатель 18 смены режима помощи при вождении. Система 1 управления движением также включает в себя контроллер 19 помощи при вождении, дисплей 21, динамик 23 и исполнительное устройство 25 рулевого управления. Система 1 управления движением монтируется на рассматриваемом транспортном средстве, и рассматриваемое транспортное средство содержит такую систему, как адаптивная система оптимального регулирования скорости, которая обеспечивает движение "в режиме ехать за" относительно едущего впереди транспортного средства впереди рассматриваемого транспортного средства.
[0011] Контроллер 3 приведения в движение транспортного средства включает в себя систему, которая управляют приведением в движение транспортного средства, такую как антиблокировочная тормозная система, система регулирования тяги или система управления динамикой транспортного средства. Контроллер 5 двигателя представляет собой контроллер, который управляет двигателем. Обращенная по ходу движения камера 7 снимает изображение перед рассматриваемым транспортным средством, чтобы получать изображение, включающее в себя изображение едущего впереди транспортного средства. Изображение, снятое посредством обращенной по ходу движения камеры 7, используется для того, чтобы получать такую информацию, как расстояние между транспортными средствами или относительная скорость по отношению к едущему впереди транспортному средству либо поперечная позиция едущего впереди транспортного средства относительно рассматриваемого транспортного средства или разделительных линий. Модуль 9 связи выполняет передачу или прием услуги обмена информацией с использованием связи между транспортным средством и дорожной инфраструктурой или мобильной телефонной линии. Приемное GPS-устройство 11 принимает информацию широты, долготы и высоты рассматриваемого транспортного средства от спутников. Обращенный по ходу движения радар 15 измеряет расстояние между транспортными средствами или относительную скорость между едущим впереди транспортным средством и рассматриваемым транспортным средством с использованием миллиметровой волны. Датчик 17 скорости транспортного средства измеряет скорость транспортного средства для рассматриваемого транспортного средства. Переключатель 18 смены режима помощи при вождении представляет собой переключатель для переключения между режимом автоматического вождения, в котором движение рассматриваемого транспортного средства управляется для того, чтобы определять местоположение рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий полосы движения, в которой движется рассматриваемое транспортное средство, или относительно едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства в полосе движения, и режимом вождения вручную, в котором движение рассматриваемого транспортного средства не управляется, и переключатель 18 смены режима помощи при вождении нажимается водителем рассматриваемого транспортного средства.
[0012] Контроллер 19 помощи при вождении управляет системой помощи при вождении или системой автоматического вождения, такой как адаптивная система оптимального регулирования скорости, экстренный тормоз или автоматически удерживаемый тормоз. Система, которая имеет функцию управления рулением, добавленную в адаптивную систему оптимального регулирования скорости, может быть дополнительно включена. Контроллер 19 помощи при вождении обнаруживает то, имеется или нет едущее впереди транспортное средство или разделительные линии (обнаружение полосы движения), с использованием обращенной по ходу движения камеры 7 или обращенного по ходу движения радара 15, измеряет расстояние между транспортными средствами и поперечную позицию едущего впереди транспортного средства относительно рассматриваемого транспортного средства или разделительных линий и передает команду в контроллер 5 двигателя или исполнительное устройство 25 рулевого управления, чтобы выполнять ускорение/замедление рассматриваемого транспортного средства или выполнять управление рулением. Контроллер 19 помощи при вождении выполняет управление скоростью транспортного средства, чтобы инструктировать рассматриваемому транспортному средству двигаться при сохранении постоянной скорости транспортного средства, когда отсутствуют едущие впереди транспортные средства, и выполняет управление поддержанием расстояния между транспортными средствами, чтобы инструктировать рассматриваемому транспортному средству двигаться при сохранении постоянного расстояния между транспортными средствами до едущего впереди транспортного средства, когда имеется едущее впереди транспортное средство. Когда едущее впереди транспортное средство останавливается, рассматриваемое транспортное средство также останавливается, чтобы выполнять управление остановкой и удерживанием.
[0013] Дисплей 21 отображает состояние системы, такой как адаптивная система оптимального регулирования скорости, экстренный тормоз или автоматически удерживаемый тормоз. Когда имеется представление информации или аварийный сигнал из адаптивной системы оптимального регулирования скорости, экстренного тормоза, автоматически удерживаемого тормоза и т.п., динамик 23 выводит звук, а также отображение. Исполнительное устройство 25 рулевого управления выполняет операцию руления для управления поперечной позицией для рассматриваемого транспортного средства при приеме инструкции от контроллера 19 помощи при вождении и устройства 100 управления движением.
[0014] Устройство 100 управления движением монтируется на рассматриваемом транспортном средстве в качестве контроллера, интегрированного с контроллером 19 помощи при вождении. Устройство 100 управления движением управляет движением рассматриваемого транспортного средства, с тем чтобы определять местоположение рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий полосы движения, в которой движется рассматриваемое транспортное средство, или едущего впереди транспортного средства (например, центральной позиции между правой и левой разделительными линиями или позиции, идентичной пути движения едущего впереди транспортного средства). В частности, устройство 100 управления движением управляет, по меньшей мере, одним из руления или торможения транспортного средства, с тем чтобы определять поперечную позицию рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий полосы движения или пути движения едущего впереди транспортного средства. Случай, в котором движение рассматриваемого транспортного средства управляется для того, чтобы определять местоположение рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий полосы движения, приводится ниже в качестве примера. Нижеприведенные описания поясняют случай, в котором устройство 100 управления движением передает управляющий сигнал в исполнительное устройство 25 рулевого управления, чтобы управлять рулением транспортного средства в качестве примера.
[0015] Устройство 100 управления движением может переключаться между режимом автоматического вождения, в котором движение рассматриваемого транспортного средства управляется, и режимом вождения вручную, в котором движение рассматриваемого транспортного средства не управляется. Устройство 100 управления движением переключается между режимом автоматического вождения и режимом вождения вручную каждый раз, когда нажимается переключатель 18. Триггер переключения не ограничен работой переключателя 18. Например, когда водитель вмешивается в автоматическое вождение в режиме автоматического вождения, устройство 100 управления движением временно переключает режим вождения на режим вождения вручную. Когда вмешательство водителя после этого завершается, управление для движения посредством устройства 100 управления движением повторно начинается после того, как предварительно определенное время прошло. Таким образом, устройство 100 управления движением переключается с режима вождения вручную на режим автоматического вождения без задействования переключателя 18.
[0016] Устройство 100 управления движением, например, представляет собой микрокомпьютер общего назначения, включающий в себя CPU (центральный процессор), запоминающее устройство и модуль ввода-вывода. Компьютерная программа (программа управления движением) для инструктирования микрокомпьютеру функционировать в качестве устройства 100 управления движением устанавливается в микрокомпьютере и выполняется. Это обеспечивает возможность микрокомпьютеру общего назначения функционировать в качестве устройства 100 управления движением. Хотя ниже описывается пример, в котором устройство 100 управления движением реализовано посредством программного обеспечения, конечно, можно подготавливать аппаратные средства, специализированные для выполнения каждой обработки информации, описанной ниже, чтобы конфигурировать устройство 100 управления движением. Множество модулей (110, 120 и 130), включенных в устройство 100 управления движением, могут быть сконфигурированы из соответствующих элементов аппаратных средств. Аналогично устройству 100 управления движением, каждый из контроллера 3 приведения в движение транспортного средства, контроллера 5 двигателя и контроллера 19 помощи при вождении также может быть реализован в качестве программного обеспечения или специализированных аппаратных средств аналогично. Устройство 100 управления движением может выполнять вторую функцию в качестве электронного модуля управления (ECU), который должен использоваться для другого управления, связанного с транспортным средством.
[0017] Устройство 100 управления движением включает в себя модуль 110 обнаружения состояния переключателя, модуль 120 распознавания разделительных линий и модуль 130 управления транспортного средства в качестве функциональных составляющих элементов. Модуль 110 обнаружения состояния переключателя обнаруживает состояние переключателя 18 смены режима помощи при вождении в реальном времени. Модуль 120 распознавания разделительных линий распознает разделительные линии, которые размечают полосу движения (собственную полосу движения), в которой движется рассматриваемое транспортное средство, из изображения, полученного посредством камеры 7. Модуль 130 управления транспортного средства управляет движением рассматриваемого транспортного средства, например, рулением рассматриваемого транспортного средства, с тем чтобы определять поперечную позицию рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий, распознанных посредством модуля 120 распознавания разделительных линий. В частности, модуль 130 управления транспортного средства передает управляющий сигнал в исполнительное устройство 25 рулевого управления, чтобы управлять крутящим моментом поворота при рулении, выводимым из исполнительного устройства 25 рулевого управления (электромотора). Таким образом, устройство 100 управления движением может осуществлять управление рулением транспортного средства.
[0018] Когда режим автоматического вождения выбирается, модуль 130 управления транспортного средства вычисляет целевое значение угла поворота при рулении, необходимое для того, чтобы определять поперечную позицию рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий на основе информации состояния движения рассматриваемого транспортного средства. Модуль 130 управления транспортного средства вычисляет целевое значение крутящего момента поворота при рулении, необходимое для того, чтобы сопоставлять фактический угол поворота при рулении с целевым значением угла поворота при рулении. Модуль 130 управления транспортного средства регулирует значение усиления, на которое должно умножаться целевое значение крутящего момента поворота при рулении, чтобы регулировать крутящий момент поворота при рулении, который должен фактически выводиться посредством исполнительного устройства 25 рулевого управления. Таким образом, модуль 130 управления транспортного средства регулирует отношение фактического крутящего момента поворота при рулении к целевому значению крутящего момента поворота при рулении с использованием значения усиления. По мере того, как значение усиления увеличивается, фактический крутящий момент поворота при рулении приближается к целевому значению крутящего момента поворота при рулении, и величина управления рулением увеличивается. Соответственно, когда значение усиления задается равным большему значению, более резкое управление рулением выполняется, и поперечная позиция рассматриваемого транспортного средства может перемещаться в предварительно определенную позицию за меньшее время.
[0019] Когда режим вождения переключается с режима вождения вручную на режим автоматического вождения, модуль 130 управления транспортного средства изменяет значение усиления согласно истекшему времени после того, как переключение выполняется, и управление для движения рассматриваемого транспортного средства начинается, за счет этого изменяя величину управления для руления. В частности, модуль 130 управления транспортного средства уменьшает значение усиления от момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, и управление для движения рассматриваемого транспортного средства начинается, до момента, когда предварительно определенное время проходит, таким образом, что оно меньше значения усиления после того, как предварительно определенное время прошло. Соответственно, величина управления при рулении от момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, и управление для движения рассматриваемого транспортного средства начинается, до момента, когда предварительно определенное время проходит, не может задаваться меньше величины управления при рулении после того, как предварительно определенное время прошло. Когда величина управления при рулении после того, как предварительно определенное время прошло, предполагается в качестве "величины нормального управления", величина управления при рулении от момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, и управление для движения рассматриваемого транспортного средства начинается, до момента, когда предварительно определенное время проходит, не является "величиной умеренного управления".
[0020] Это предотвращает применение величины нормального управления к движению транспортного средства сразу после начала управления удержанием в полосе движения или сразу после его повторного начала и подавляет резкое начало управления движением. Следовательно, ощущение дискомфорта, вызываемое у водителя, может уменьшаться. В частности, поперечная позиция относительно разделительных линий, в которой водитель может легко приводить в движение транспортное средство, отличается согласно водителю. Следовательно, если транспортное средство резко управляется из поперечной позиции с простым приведением в движение в предварительно определенную позицию (например, в центральную позицию полосы движения) во время начала управления удержанием в полосе движения, водитель может ощущать большой дискомфорт. Следовательно, поперечная позиция постепенно изменяется во время начала управления, что позволяет уменьшать дискомфорт. "Величина умеренного управления" не включает в себя величину управления в нуль. Таким образом, управление для движения выполняется с "величиной умеренного управления", не равной нулю, без задержки начала управления для движения посредством устройства 100 управления движением от момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит.
[0021] Когда режим вождения переключается с режима вождения вручную на режим автоматического вождения, модуль 130 управления транспортного средства определяет на основе информации состояния движения рассматриваемого транспортного средства то, отклоняется или нет рассматриваемое транспортное средство от полосы движения, если текущее состояние движения рассматриваемого транспортного средства поддерживается. Таким образом, модуль 130 управления транспортного средства определяет то, выходит или нет ожидаемый путь движения рассматриваемого транспортного средства, который предполагается из состояния руления или угловой скорости относительно вертикальной оси рассматриваемого транспортного средства, за пределы пары правой и левой разделительных линий, распознанных посредством модуля 120 распознавания разделительных линий. При определении того, что рассматриваемое транспортное средство отклоняется от полосы движения, модуль 130 управления транспортного средства выполняет управление рулением, требуемым для того, чтобы предотвращать отклонение рассматриваемого транспортного средства от полосы движения с "величиной нормального управления". После того, как управление рулением, требуемым для того, чтобы предотвращать отклонение рассматриваемого транспортного средства от полосы движения, выполняется, величина управления для руления задается равной "величине умеренного управления". Другими словами, величина управления, требуемая для того, чтобы предотвращать отклонение рассматриваемого транспортного средства от полосы движения в величине управления при рулении от момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит, задается больше последующей величины управления для руления.
[0022] Соответственно, можно задавать величину управления при рулении для предотвращения отклонения от полосы движения равной большому значению и уменьшать последующую величину управления для руления. Следовательно, ощущение дискомфорта, вызываемое у водителя, может уменьшаться при том, что предотвращается отклонение от полосы движения.
[0023] В дальнейшем описывается пример способа управления движением с использованием устройства 100 управления движением, проиллюстрированного на фиг. 1 со ссылкой на фиг. 2. Блок-схема последовательности операций способа по фиг. 2 начинается посредством включения переключателя зажигания (IGN), включенного в рассматриваемое транспортное средство, и многократно выполняется до момента, когда переключатель зажигания (IGN) выключается.
[0024] На этапе S01, модуль 110 обнаружения состояния переключателя обнаруживает состояние переключателя 18 смены режима помощи при вождении. Когда состояние переключателя 18 представляет собой включенное состояние ("Да" на этапе S03), определяется то, что режим автоматического вождения выбирается, и процесс переходит к этапу S05. С другой стороны, когда состояние переключателя 18 представляет собой выключенное состояние ("Нет" на этапе S03), определяется то, что режим вождения вручную выбирается, устройство 100 управления движением затем выполняет режим вождения вручную (этап S11), и процесс переходит к этапу S13.
[0025] На этапе S05, устройство 100 управления движением определяет то, вмешивается или нет водитель в руление. Когда определяется то, что водитель вмешивается в руление ("Да" на этапе S05), устройство 100 управления движением определяет то, что водитель не намеревается продолжать режим автоматического вождения, и переключает переключатель 18 смены режима помощи при вождении из включенного состояния в выключенное состояние. Режим вождения вручную в силу этого выполняется (этап S11). Хотя не проиллюстрировано, процесс включает в себя последовательность операций автоматического возврата из режима вождения вручную в режим автоматического вождения, когда водитель завершает вмешательство в управление движением.
[0026] С другой стороны, когда определяется то, что водитель не вмешивается в руление ("Нет" на этапе S05), процесс переходит к этапу S07, и устройство 100 управления движением выполняет управление удержанием в полосе движения. Таким образом, устройство 100 управления движением распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства, с тем чтобы определять местоположение рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий полосы движения. Ниже описываются подробности управления удержанием в полосе движения со ссылкой на фиг. 3.
[0027] На этапе S13, определяется то, находится или нет переключатель зажигания (IGN) в выключенном состоянии. Процесс возвращается к этапу S01, когда переключатель зажигания (IGN) находится во включенном состоянии ("Нет" на этапе S13), и последовательность операций, проиллюстрированная на фиг. 2, завершается, когда переключатель зажигания (IGN) находится в выключенном состоянии ("Да" на этапе S13).
[0028] В дальнейшем описывается подробная процедура управления удержанием в полосе движения (этап S07) на фиг. 2 со ссылкой на фиг. 3.
[0029] Во-первых, на этапе S701, модуль 110 обнаружения состояния переключателя определяет то, переключен или нет режим вождения с режима вождения вручную на режим автоматического вождения через операцию переключателя 18 смены режима помощи при вождении водителем. Когда режим вождения переключен ("Да" на этапе S701), процесс переходит к этапу S703, и модуль 130 управления транспортного средства определяет, на основе информации состояния движения рассматриваемого транспортного средства, то, отклоняется или нет рассматриваемое транспортное средство от полосы движения, если состояние движения (состояние ускорения/замедления или состояние руления) рассматриваемого транспортного средства поддерживается. Когда определяется то, что рассматриваемое транспортное средство отклоняется от полосы движения ("Да" на этапе S703), процесс переходит к этапу S704, и модуль 130 управления транспортного средства выполняет управление удержанием в полосе движения, требуемое для того, чтобы предотвращать отклонение рассматриваемого транспортного средства от полосы движения с "величиной нормального управления". В частности, модуль 130 управления транспортного средства задает отношение (значение усиления) фактического крутящего момента поворота при рулении к целевому значению крутящего момента поворота при рулении равным большему значению, чем предварительно определенное опорное значение.
[0030] Когда определяется то, что рассматриваемое транспортное средство не отклоняется от полосы движения ("Нет" на этапе S703), процесс переходит к этапу S705, и модуль 130 управления транспортного средства выполняет управление удержанием в полосе движения с "величиной умеренного управления", меньшей "величины нормального управления". В частности, модуль 130 управления транспортного средства задает отношение (значение усиления) фактического крутящего момента поворота при рулении к целевому значению крутящего момента поворота при рулении равным значению, меньшему предварительно определенного опорного значения.
[0031] На этапе S707, определяется то, прошло или нет предварительно определенное время с момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, и управление для движения рассматриваемого транспортного средства начинается. Это обеспечивает возможность модулю 130 управления транспортного средства выполнять управление удержанием в полосе движения с "величиной умеренного управления" до момента, когда предварительно определенное время проходит с момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, и управление для движения рассматриваемого транспортного средства начинается.
[0032] Когда предварительно определенное время прошло с момента, когда переключение с режима вождения вручную на режим автоматического вождения выполняется, и управление для движения рассматриваемого транспортного средства начинается ("Да" на этапе S707), процесс переходит к этапу S711, и модуль 130 управления транспортного средства выполняет управление удержанием в полосе движения с "величиной нормального управления". После этого процесс возвращается к этапу S13 на фиг. 2.
[0033] Хотя настоящее изобретение описывается выше в отношении варианта осуществления, не следует истолковывать это так, что настоящее изобретение ограничено описаниями и чертежами, которые составляют часть настоящего раскрытия сущности. На основе настоящего раскрытия сущности, различные альтернативные варианты осуществления, практические примеры и технологии работы должны становиться очевидными для специалистов в данной области техники.
[0034] Хотя описывается пример, в котором устройство 100 управления движением управляет рулением транспортного средства в качестве одного примера управления движением, настоящее изобретение не ограничено этим. Например, тормозная сила правой и левой шин может управляться независимо вместо руления транспортным средством или в дополнение к рулению транспортным средством. Например, посредством приложения тормозной силы только к правой или левой шине, рассматриваемое транспортное средство может поворачивать направо или налево.
[0035] Соответствующие функции, описанные в вышеописанном варианте осуществления, могут реализовываться посредством одной схемы обработки или нескольких схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Обрабатывающее устройство также включает в себя такое устройство, как специализированная интегральная схема (ASIC) или традиционный схемный компонент, адаптированный с возможностью выполнять функции, описанные в варианте осуществления.
[0036] Хотя в варианте осуществления показан пример управления удержанием в полосе движения, чтобы управлять движением рассматриваемого транспортного средства, с тем чтобы определять местоположение рассматриваемого транспортного средства в предварительно определенной позиции относительно разделительных линий полосы движения, в которой движется рассматриваемое транспортное средство, настоящее изобретение не ограничено этим. Например, настоящее изобретение также может применяться к следующему управлению для того, чтобы управлять движением рассматриваемого транспортного средства, с тем чтобы определять местоположение рассматриваемого транспортного средства в предварительно определенной позиции относительно едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства в полосе движения.
[0037] Содержимое заявки на патент Японии № 2016-133219 (поданной 5 июля 2016 года) полностью содержится по ссылке в данном документе, что защищает настоящую заявку от неправильных переводов и пропусков.
Список номеров ссылок
[0038] 18 - переключатель смены режима помощи при вождении
25 - исполнительное устройство рулевого управления
100 - устройство управления движением
110 - модуль обнаружения состояния переключателя
120 - модуль распознавания разделительных линий
130 - модуль управления транспортного средства
Изобретение относится к способу управления движением и к устройству управления движением. Способ управления движением транспортного средства для устройства управления движением транспортного средства содержит этапы, на которых, когда выполняется переключение с режима вождения вручную на режим автоматического вождения: вычисляют целевое значение угла поворота при рулении, вычисляют целевое значение управления, регулируют значение усиления, на которое должно умножаться целевое значение управления, определяют, отклоняется или нет рассматриваемое транспортное средство от полосы движения. Если определяется то, что рассматриваемое транспортное средство не отклоняется от полосы движения, тогда предварительно определенное время проходит, меньшим чем значение усиления после того, как предварительно определенное время прошло, и если определяется то, что рассматриваемое транспортное средство отклоняется от полосы движения, тогда предварительно определенное время проходит, равным значению усиления после того, как предварительно определенное время прошло. Устройство управления движением, которое может переключаться между режимом автоматического вождения и режимом вождения вручную, в котором движение рассматриваемого транспортного средства не управляется. Достигается повышение безопасности водителя. 2 н. и 1 з.п. ф-лы, 3 ил.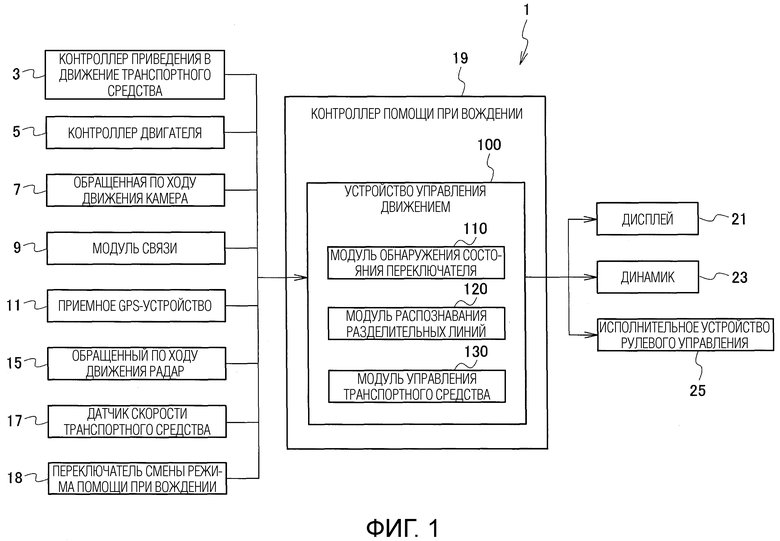
1. Способ управления движением транспортного средства для устройства управления движением транспортного средства, которое может переключаться между режимом автоматического вождения, в котором движение рассматриваемого транспортного средства управляется для того, чтобы определять поперечную позицию рассматриваемого транспортного средства в предварительно определенной позиции относительно полосы движения, в которой движется рассматриваемое транспортное средство, и режимом вождения вручную, в котором движение рассматриваемого транспортного средства не управляется, при этом способ содержит этапы, на которых:
когда выполняется переключение с режима вождения вручную на режим автоматического вождения:
вычисляют целевое значение угла поворота при рулении, требуемое для того, чтобы определять поперечную позицию рассматриваемого транспортного средства относительно полосы движения в предварительно определенной позиции;
вычисляют целевое значение управления, требуемое для того, чтобы инструктировать фактическому углу поворота при рулении совпадать с целевым значением угла поворота при рулении;
регулируют значение усиления, на которое должно умножаться целевое значение управления, чтобы регулировать фактическую величину управления;
определяют, отклоняется или нет рассматриваемое транспортное средство от полосы движения;
если определяется то, что рассматриваемое транспортное средство не отклоняется от полосы движения, задают значение усиления во время от момента, когда переключение на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит, меньшим чем значение усиления после того, как предварительно определенное время прошло; и
если определяется то, что рассматриваемое транспортное средство отклоняется от полосы движения, задают значение усиления во время от момента, когда переключение на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит, равным значению усиления после того, как предварительно определенное время прошло.
2. Способ управления движением по п. 1, содержащий этапы, на которых:
когда определяется то, что рассматриваемое транспортное средство отклоняется от полосы движения во время от момента, когда переключение на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит:
выполняют управление для движения, требуемое для того, чтобы обеспечивать возможность рассматриваемому транспортному средству сохранять полосу движения с величиной управления для движения после того, как предварительно определенное время прошло; и
задают величину управления для движения после того, как управление для движения, требуемое для того, чтобы обеспечивать возможность рассматриваемому транспортному средству сохранять полосу движения, выполнено, равной величине управления для движения до момента, когда предварительно определенное время проходит.
3. Устройство управления движением, которое может переключаться между режимом автоматического вождения, в котором движение рассматриваемого транспортного средства управляется для того, чтобы определять поперечную позицию рассматриваемого транспортного средства в предварительно определенной позиции относительно полосы движения, в которой движется рассматриваемое транспортное средство, и режимом вождения вручную, в котором движение рассматриваемого транспортного средства не управляется, при этом:
когда выполняется переключение с режима вождения вручную на режим автоматического вождения,
целевое значение угла поворота при рулении, требуемое для того, чтобы определять поперечную позицию рассматриваемого транспортного средства относительно полосы движения в предварительно определенной позиции, вычисляется,
целевое значение управления, требуемое для того, чтобы инструктировать фактическому углу поворота при рулении совпадать с целевым значением угла поворота при рулении, вычисляется,
значение усиления, на которое должно умножаться целевое значение управления, регулируется, чтобы регулировать фактическую величину управления,
определяют отклоняется или нет рассматриваемое транспортное средство от полосы движения,
если определяется то, что рассматриваемое транспортное средство не отклоняется от полосы движения, значение усиления во время от момента, когда переключение на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит, задается меньшим чем значение усиления после того, как предварительно определенное время прошло; и
если определяется то, что рассматриваемое транспортное средство отклоняется от полосы движения, значение усиления во время от момента, когда переключение на режим автоматического вождения выполняется, до момента, когда предварительно определенное время проходит, задается равным значению усиления после того, как предварительно определенное время прошло.
| JP 2013180638 A, 12.09.2013 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| US 7389167 B2, 17.06.2008. | |||

