ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к помощнику при вождении транспортного средства и к способу помощи при вождении транспортного средства для помощи водителю при операции вождения так, что может не допускаться подъезд упомянутого транспортного средства водителя к помехе, расположенной в направлении позади и сбоку от упомянутого транспортного средства.
УРОВЕНЬ ТЕХНИКИ
В качестве традиционного помощника при вождении транспортного средства, например, представлена технология, описанная в патентном документе 1. Согласно этой технологии, определяется помеха в направлении позади и сбоку от упомянутого транспортного средства водителя, и когда помеха определена, определяется то, что необходимо управление помощью в вождении относительно помехи, тем самым подавляется операция руления водителем. Раскрыто то, что вышеуказанные операции не допускают подъезд к помехе упомянутого транспортного средства.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
Патентная литература
Патентный документ 1. Не прошедшая экспертизу патентная публикация Японии номер Heisei 8 (1996)-253160
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
Тем не менее, согласно технологии, описанной в патентном документе 1, даже когда водитель выполняет операцию руления в сторону помехи при распознавании помехи, если помеха присутствует в направлении позади и сбоку от упомянутого транспортного средства, упомянутое транспортное средство управляется таким образом, чтобы не допускать подъезда к помехе. Таким образом, такое управление может вызывать дискомфорт у водителя.
Настоящее изобретение осуществлено с учетом вышеизложенных положений. Задача настоящего изобретения заключается в том, чтобы предоставлять помощника при вождении транспортного средства, который уменьшает дискомфорт, вызываемый у водителя, и допускает надлежащую реализацию управления помощью при вождении относительно помехи, расположенной в направлении позади и сбоку от упомянутого транспортного средства.
РЕШЕНИЕ ЗАДАЧИ
Для решения вышеуказанной задачи, согласно первому аспекту настоящего изобретения, предусмотрен помощник при вождении транспортного средства, включающий в себя: детектор помех сбоку для определения помехи, присутствующей в области определения помех, причем, по меньшей мере, направление позади и сбоку от упомянутого транспортного средства задается в качестве области определения помех; контроллер предотвращения подъезда к помехе для реализации управления предотвращением подъезда к помехе, которое помогает предотвращению подъезда для предотвращения подъезда упомянутого транспортного средства к помехе, определенной посредством детектора помех сбоку; детектор состояния обгона для определения состояния обгона, которое является, по меньшей мере, одним из первого состояния, в котором упомянутое транспортное средство обгоняет помеху, определяемую посредством детектора помех сбоку, и второго состояния, в котором оценивается то, что упомянутое транспортное средство должно обгонять помеху; и модуль подавления управления, когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, для подавления управления предотвращением подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Когда упомянутое транспортное средство водителя осуществляет подъезд к помехе, чтобы тем самым удовлетворять условию начала управления предотвращением подъезда к помехе, в случае если может быть определено то, что упомянутое транспортное средство водителя находится в состоянии обгона помехи или в состоянии, в котором оценивается то, что оно должно обгонять помеху, предполагается, что водитель имеет намерение выполнения смены полосы движения в сторону помехи при распознавании присутствия помехи. В соответствии с настоящим изобретением, в таком случае управление предотвращением подъезда к помехе подавляется, как результат, позволяя подавлять дискомфорт водителя. Т.е. при уменьшении дискомфорта, вызываемого у водителя, настоящее изобретение может надлежащим образом реализовывать управление помощью при вождении относительно помехи, расположенной в направлении позади и сбоку от упомянутого транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 является схематичным структурным видом помощника при вождении транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг.2 является концептуальной схемой для пояснения области определения помех и т.п. в направлении позади и сбоку от упомянутого транспортного средства.
Фиг.3 является схемой для пояснения структуры модуля управления.
Фиг.4 является блок-схемой последовательности операций способа, показывающей процедуру обработки модуля управления согласно первому варианту осуществления настоящего изобретения.
Фиг.5 является блок-схемой, показывающей принцип вычисления величины точности обгона слева.
Фиг.6 является блок-схемой, показывающей принцип вычисления величины точности определения смены полосы движения влево в направлении помехи слева.
Фиг.7 является концептуальной схемой, показывающей взаимосвязь между упомянутым транспортным средством и помехой.
Фиг.8 является схемой для пояснения работы согласно первому варианту осуществления настоящего изобретения.
Фиг.9 является блок-схемой последовательности операций способа, показывающей процедуру обработки модуля управления согласно второму варианту осуществления настоящего изобретения.
Фиг.10 является блок-схемой последовательности операций способа, показывающей процедуру обработки модуля управления согласно третьему и четвертому вариантам осуществления настоящего изобретения.
Фиг.11 является концептуальной схемой для пояснения четвертого варианта осуществления настоящего изобретения.
Фиг.12 является блок-схемой последовательности операций способа, показывающей процедуру обработки модуля управления согласно пятому варианту осуществления настоящего изобретения.
Фиг.13 является блок-схемой последовательности операций способа, показывающей процедуру обработки вычисления левого усиления.
Фиг.14 является схемой, показывающей точку въезда в поток полосы движения упомянутого транспортного средства.
Фиг.15 является схемой для пояснения работы согласно пятому варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В дальнейшем в этом документе, варианты осуществления настоящего изобретения изложены со ссылкой на чертежи.
Первый вариант осуществления
Согласно первому варианту осуществления, приводится пояснение относительно случая, когда помощник при вождении транспортного средства устанавливается в заднеприводном транспортном средстве. В данном документе, в качестве целевого транспортного средства, переднеприводное транспортное средство или полноприводное транспортное средство также может быть использовано. Помимо этого, электромобиль (EV) или гибридное транспортное средство также может быть использовано.
Структура
Фиг.1 является схематичным структурным видом помощника при вождении транспортного средства согласно первому варианту осуществления.
На фиг.1, ссылка с номером 1 обозначает педаль тормоза. Педаль 1 тормоза соединяется с главным цилиндром 3 через усилитель 2. Кроме того, ссылка с номером 4 на фиг.1 обозначает резервуар.
Главный цилиндр 3 соединяется с колесными тормозными цилиндрами 6FL, 6FR, 6RL, 6RR соответствующих колес 5FL, 5FR, 5RL, 5RR через схему 30 давления жидкости. Тем самым, в состоянии, в котором управление торможением не работает, главный цилиндр 3 увеличивает давление тормозной жидкости согласно величине нажатия водителя педали 1 тормоза. Таким образом, увеличенное давление тормозной жидкости подается через схему 30 давления жидкости в каждый из колесных тормозных цилиндров 6FL, 6FR, 6RL, 6RR соответствующих колес 5FL, 5FR, 5RL, 5RR.
Контроллер 7 давления тормозной жидкости управляет актуатором 30A в схеме 30 давления жидкости, чтобы тем самым по отдельности управлять давлением тормозной жидкости в каждом из колес 5FL, 5FR, 5RL, 5RR. Затем, согласно значению в соответствии со значением команды управления из модуля 8 управления тормозной/движущей силой, контроллер 7 давления тормозной жидкости управляет давлением тормозной жидкости в каждом из колес 5FL, 5FR, 5RL, 5RR. В качестве актуатора 30A предусмотрены пропорциональные электромагнитные клапаны, которые располагаются согласно соответствующим колесным тормозным цилиндрам 6FL, 6FR, 6RL, 6RR и которые могут по отдельности управлять давлениями жидкости соответствующих колесных тормозных цилиндров 6FL, 6FR, 6RL, 6RR при произвольном давлении тормозной жидкости.
В данном документе, контроллер 7 давления тормозной жидкости и схема 30 давления жидкости могут использовать контроллер давления тормозной жидкости, который используется, например, для управления антиблокировочной системой (ABS), системой регулирования тягового усилия (TCS) или системой динамической стабилизации (VDC). Контроллер 7 давления тормозной жидкости может в противном случае конфигурироваться таким образом, что контроллер 7 давления тормозной жидкости может самостоятельно, т.е. вместо того, чтобы через схему 30 давления жидкости, управлять давлением тормозной жидкости каждого из колесных тормозных цилиндров 6FL, 6FR, 6RL, 6RR. Затем, когда значение команды управления давлением тормозной жидкости вводится в контроллер 7 давления тормозной жидкости нижеописанного модуля 8 управления тормозной/движущей силой, контроллер 7 давления тормозной жидкости управляет каждым давлением тормозной жидкости согласно значению команды управления давлением тормозной жидкости.
Кроме того, это транспортное средство имеет модуль 12 управления крутящим моментом приведения в движение.
Модуль 12 управления крутящим моментом приведения в движение управляет крутящим моментом приведения в движение для задних колес 5RL, 5RR в качестве ведущих колес. Это управление может быть выполнено посредством управления рабочим режимом двигателя 9, выборочным передаточным отношением автоматической трансмиссии 10 и открытием дросселя дроссельного клапана 11. Т.е. модуль 12 управления крутящим моментом приведения в движение управляет величиной впрыска топлива или распределением зажигания. Кроме того, одновременно, модуль 12 управления крутящим моментом приведения в движение управляет открытием дросселя. Посредством этих операций, модуль 12 управления крутящим моментом приведения в движение управляет рабочим режимом двигателя 9.
Кроме того, модуль 12 управления крутящим моментом приведения в движение выводит значение крутящего момента Tw приведения в движение (в качестве информации для управления) в модуль 8 управления тормозной/движущей силой.
В противном случае, модуль 12 управления крутящим моментом приведения в движение может самостоятельно, т.е. вместо того, чтобы через модуль 8 управления тормозной/движущей силой, управлять крутящим моментом Tw приведения в движение задних колес 5RL, 5RR. Тем не менее, когда значение команды управления крутящим моментом приведения в движение вводится из модуля 8 управления тормозной/движущей силой, модуль 12 управления крутящим моментом приведения в движение управляет крутящим моментом Tw приведения в движение, согласно, таким образом, введенному значению команды управления крутящим моментом приведения в движение.
Кроме того, передняя часть транспортного средства имеет часть 13 захвата изображений, имеющую функцию обработки изображений. Часть 13 захвата изображений используется для определения положения упомянутого транспортного средства MM водителя (см. фиг.2) в полосе движения. Часть 13 захвата изображений имеет монокулярную камеру, которая сделана, например, из камеры на основе CCD (прибора с зарядовой связью).
Часть 13 захвата изображений снимает изображение прямого направления упомянутого транспортного средства MM. Затем, часть 13 захвата изображений реализует обработку изображений для таким образом снятого изображения в прямом направлении упомянутого транспортного средства MM, определяет полосу безопасности, к примеру, полосу 200 дорожной разметки (разделительную линию) и т.п. (см. фиг.7) и затем определяет полосу движения на основе таким образом определенной полосы 200 дорожной разметки.
Кроме того, на основе таким образом определенной полосы движения, часть 13 захвата изображений вычисляет угол φf (угол поворота вокруг вертикальной оси), сформированный посредством полосы движения упомянутого транспортного средства MM и продольной оси направления упомянутого транспортного средства MM, поперечное смещение Xf относительно полосы движения, кривизну β полосы движения и т.п. Часть 13 захвата изображений выводит таким образом вычисленный угол φf поворота вокруг вертикальной оси, поперечное смещение Xf, кривизну (искривление) β полосы движения и т.п. в модуль 8 управления тормозной/движущей силой.
В данном документе, часть 13 захвата изображений определяет полосу 200 дорожной разметки в качестве полосы движения и затем, на основе таким образом определенной линии 200, вычисляет угол φf поворота вокруг вертикальной оси. Следовательно, на точность определения угла φf поворота вокруг вертикальной оси значительное влияние оказывает точность части 13 захвата изображений для определения полосы 200 дорожной разметки.
В противном случае, кривизна β полосы движения может быть вычислена на основе угла δ поворота рулевого колеса от нижеописанного руля 21.
Кроме того, транспортное средство имеет радарные устройства 24L/24R. Радарные устройства 24L/24R являются датчиками для определения помехи SM (см. фиг.2), присутствующими в направлении позади и сбоку на соответствующих левой и правой сторонах. Радарные устройства 24L/24R, как показано на фиг.2, допускают определение помехи SM в боковом направлении упомянутого транспортного средства MM. Затем, из определяемого диапазона, радарные устройства 24L/24R задают, в качестве области K-AREA определения помех, по меньшей мере, область, которая размещается в направлении позади и сбоку от упомянутого транспортного средства и представляет мертвый угол (для водителя). Когда помеха SM присутствует в области K-AREA определения помех, радарные устройства 24L/24R определяют то, что помеха SM присутствует. Кроме того, на каждой из соответствующих левой и правой сторон, радарные устройства 24L/24R могут определять относительное поперечное положение POSXobst, относительное продольное положение DISTobst и относительную продольную скорость dDistobst, которые задаются относительно помехи SM. В данном документе, согласно первому варианту осуществления, направление длины полосы движения упомянутого транспортного средства MM задается как продольное направление, а направление ширины полосы движения упомянутого транспортного средства MM задается как поперечное направление. Помимо этого, радарные устройства 24L/24R изготавливаются, например, из радара диапазона миллиметровых волн.
Кроме того, это транспортное средство имеет радарное устройство 23. Радарное устройство 23 является датчиком для определения помехи SM, присутствующей в прямом направлении упомянутого транспортного средства MM. Радарное устройство 23 может определять расстояние Dist_pre между упомянутым транспортным средством MM и помехой SM спереди и относительную скорость Relvsp_pre между упомянутым транспортным средством MM и помехой SM спереди.
Кроме того, это транспортное средство имеет датчик 17 давления в главном цилиндре, датчик 18 открытия акселератора, датчик 19 угла поворота рулевого колеса, переключатель 20 указателя поворота и датчики 22FL, 22FR, 22LR, 22RR скорости вращения колес.
Датчик 17 давления в главном цилиндре определяет выходное давление главного цилиндра 3, т.е. давление Pm жидкости в главном цилиндре. Датчик 18 открытия акселератора определяет величину нажатия педали акселератора, т.е. открытие θt акселератора (или величину θt нажатия педали акселератора). Датчик 19 угла поворота рулевого колеса определяет угол δ поворота рулевого колеса от рулевого колеса 21. Переключатель 20 указателя поворота определяет операцию указания поворота посредством указателя поворота. Датчики 22FL, 22FR, 22LR, 22RR скорости вращения колес определяют частоты вращения соответствующих колес 5FL, 5FR, 5RL, 5RR, причем каждая из этих скоростей называется скоростью Vwi вращения колес (i = fl, fr, rl, rr). Затем, эти датчики и т.п. выводят таким образом определенные сигналы в модуль 8 управления тормозной/движущей силой.
Навигационная система 40 устанавливается в этом транспортном средстве. Вместе с информацией дороги, к примеру, картографической информацией и т.п., включающей в себя кривизну дороги, навигационная система 40 выводит в модуль 8 управления тормозной/движущей силой информацию маршрута, которая задается на основе ввода водителем пункта назначения.
Фиг.3 является блок-схемой, схематично показывающей обработки модуля 8 управления тормозной/движущей силой. Обработки модуля 8 управления тормозной/движущей силой реализуются на основе нижеописанной блок-схемы последовательности операций способа, показанной на фиг.4, тем не менее, фиг.3 обозначает обработки схематично в качестве блоков.
Как показано на фиг.3, модуль 8 управления тормозной/движущей силой имеет модуль 8A оценки упрежденного положения, контроллер 8B предотвращения подъезда к помехе, детектор 8C состояния обгона и детектор 8D намерения смены. Кроме того, контроллер 8B предотвращения подъезда к помехе имеет модуль 8Ba подавления управления.
На основе входного сигнала руления водителя, определяемого посредством детектора входного сигнала руления, модуль 8A оценки упрежденного положения оценивает упрежденное положение упомянутого транспортного средства (упрежденное положение упомянутого транспортного средства в направлении ширины полосы движения или нижеописанное расчетное положение ΔXb упомянутого транспортного средства) после истечения времени Tt упреждающего отслеживания.
Детектор 50 помех сбоку является эквивалентным радарным устройствам 24L/24R и определяет фрагменты информации помехи SM в отношении упомянутого транспортного средства MM, причем информация включает в себя присутствие или отсутствие помехи SM в области K-AREA определения помех в направлении позади и сбоку от упомянутого транспортного средства MM, относительное поперечное положение POSXobst помехи SM, относительное продольное положение DISTobst, относительную продольную скорость dDistobst и т.п.
Контроллер 8B предотвращения подъезда к помехе реализует управление предотвращением подъезда к помехе для помощи в предотвращении подъезда упомянутого транспортного средства MM к помехе SM, определенной посредством детектора 50 помех сбоку. В частности, в случае если определяется то, что детектор 50 помех сбоку определяет помеху SM в направлении позади и сбоку от упомянутого транспортного средства MM, контроллер 8B предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе, когда поперечное положение упрежденного положения упомянутого транспортного средства 150 достигает начального положения 60 управления (известной поперечной части в направлении ширины полосы движения, см. нижеописанную фиг.7), и затем реализует управление предотвращением подъезда к помехе.
На основе информации, определяемой посредством детектора 50 помех сбоку, т.е. информации помехи SM в отношении упомянутого транспортного средства MM, детектор 8C состояния обгона определяет состояние обгона, которое задается как, по меньшей мере, одно из первого состояния, в котором упомянутое транспортное средство MM обгоняет помеху SM, и второго состояния, в котором оценивается то, что упомянутое транспортное средство MM должно обгонять помеху SM, и затем детектор 8C состояния обгона выводит, таким образом, определенную информацию в модуль 8Ba подавления управления.
Детектор 8D намерения смены вычисляет точность намерения смены полосы движения водителем. Когда таким образом вычисленная точность намерения смены полосы движения является высокой, детектор 8D намерения смены определяет то, что водитель имеет намерение смены полосы движения, чтобы тем самым выводить эту информацию в модуль 8Ba подавления управления.
Когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора 8C состояния обгона, модуль 8Ba подавления управления подавляет управление предотвращением подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено.
Фиг.4 является блок-схемой последовательности операций способа, показывающей процедуру обработки при управлении предотвращением, реализованную посредством модуля 8 управления тормозной/движущей силой.
Процедура обработки при управлении предотвращением реализуется посредством прерывания таймера в расчете на известное время ΔT дискретизации (например, каждые 10 мс). В данном документе, обработка при управлении предотвращением, показанная на фиг.4, не имеет обработки связи, тем не менее, обновление информации, обнаруживаемой посредством обработки вычисления, запоминается в запоминающем устройстве по мере необходимости, и необходимая информация считывается из запоминающего устройства по мере необходимости.
<Этап S10>
Сначала, на этапе S10, модуль 8 управления тормозной/движущей силой считывает различные данные из каждого из вышеуказанных датчиков, контроллеров и модулей управления. В частности, модуль 8 управления тормозной/движущей силой обнаруживает скорость Vwi вращения каждого колеса (I = fl, fr, rl, rr), угол δ поворота рулевого колеса, открытие θt акселератора, давление Pm жидкости в главном цилиндре, которые определяются посредством каждого из датчиков, включающих в себя датчики 22FL, 22FR, 22LR, 22RR скорости вращения колес, датчик 19 угла поворота рулевого колеса, датчик 18 открытия акселератора и датчик 17 давления в главном цилиндре. Кроме того, модуль 8 управления тормозной/движущей силой обнаруживает i) сигнал смены направления переключателя 20 указателя поворота, ii) угол φf поворота вокруг вертикальной оси, поперечное смещение Xf, кривизну β полосы движения, которые определяются посредством части 13 захвата изображений, и iii) информацию помехи SM сбоку, определяемую посредством радарных устройств 24L/24R (детектора 50 помех сбоку).
<Этап S20>
Затем, на этапе S20, модуль 8 управления тормозной/движущей силой вычисляет скорость V транспортного средства. Т.е. на основе скорости Vwi вращения колес (i = fl, fr, rl, rr), определяемой посредством датчиков 22FL, 22FR, 22LR, 22RR скорости вращения колес, модуль 8 управления тормозной/движущей силой вычисляет скорость V транспортного средства, как показано в нижеприведенном выражении:
V=(Vwrl+Vwrr)/2 (для переднего привода),
V=(Vwfl+Vwfr)/2 (для заднего привода) (1)
В данном документе, Vwfl и Vwfr обозначают скорости вращения колес для левого и правого передних колес, соответственно. Vwrl и Vwrr обозначают скорости вращения колес для левого и правого задних колес, соответственно. Т.е. в выражении (1) скорость V транспортного средства вычисляется как среднее скоростей вращения колес для ведомых колес. Согласно первому варианту осуществления, транспортное средство имеет задний привод, поэтому второе выражение, т.е. скорости Vwfl и Vwfr вращения колес для соответствующих левого и правого передних колес 5FL и 5FR, используется для вычисления скорости V транспортного средства.
Кроме того, когда другой контроллер автоматического торможения, к примеру, механизм управления ABS (антиблокировочная тормозная система) работает, расчетная скорость транспортного средства, оцененная посредством такого контроллера автоматического торможения, обнаруживается и используется в качестве вышеуказанной скорости V транспортного средства.
<Этап S30>
На этапе S30, на основе сигналов из радарных устройств 24L/24R на соответствующих левой и правой сторонах, модуль 8 управления тормозной/движущей силой, определяет присутствие Lobst-Robst помехи SM (присутствие или отсутствие) относительно области K-AREA определения помех, заданной в левом и правом направлениях позади и сбоку от упомянутого транспортного средства MM. Кроме того, модуль 8 управления тормозной/движущей силой обнаруживает положение и скорость помехи SM сзади сбоку относительно упомянутого транспортного средства MM. В данном документе, направление позади и сбоку от упомянутого транспортного средства MM указывает боковое и заднее положения упомянутого транспортного средства MM. Т.е. направление позади и сбоку от упомянутого транспортного средства MM включает в себя диагональное заднее положение упомянутого транспортного средства MM.
<Этап S40>
Затем, на этапе S40, из части 13 захвата изображений, модуль 8 управления тормозной/движущей силой считывает поперечное смещение Xf упомянутого транспортного средства MM и кривизну β полосы движения относительно проезжей дороги, по которой упомянутое транспортное средство MM в настоящее время движется.
Тем не менее, обнаружение кривизны β полосы движения не ограничивается вычислением на основе изображения, снятого посредством части 13 захвата изображений. В противном случае, например, информация кривизны полосы движения в положении упомянутого транспортного средства может обнаруживаться на основе картографической информации, запоминаемой в навигационной системе 40.
Затем, угол φf поворота вокруг вертикальной оси упомянутого транспортного средства MM относительно проезжей дороги, по которой водитель в настоящее время едет, вычисляется. Угол φf поворота вокруг вертикальной оси используется для определения состояния движения в полосе движения.
Согласно первому варианту осуществления, угол φf поворота вокруг вертикальной оси может определяться, например, посредством следующих операций: изображение в прямом направлении транспортного средства, причем это изображение снято посредством части 13 захвата изображений, преобразуется в снятое сверху изображение, и получается угол полосы 200 дорожной разметки (разделительной линии) относительно направления вверх-вниз таким образом преобразованного изображения.
В противном случае, угол φf поворота вокруг вертикальной оси может быть вычислен на основе полосы 200 дорожной разметки рядом с упомянутым транспортным средством MM в изображении, снятом посредством части 13 захвата изображений. В этом случае, например, величина изменения поперечного смещения Xf упомянутого транспортного средства MM используется, чтобы тем самым вычислять угол φf поворота вокруг вертикальной оси посредством следующего выражения (2). В данном документе, поперечное смещение Xf является положением в направлении ширины в полосе движения упомянутого транспортного средства MM в отношении полосы 200 дорожной разметки (разделительной линии) и является эквивалентным расстоянию от полосы 200 дорожной разметки до упомянутого транспортного средства MM.
φf=tan-1 (dX'/V(=dX/dY)) (2)
В данном документе, dX обозначает величину изменения поперечного смещения Xf в единицу времени, dY обозначает величину изменения направления движения в единицу времени, а dX' обозначает дифференциальное значение величины dX изменения.
В данном документе, когда угол φf поворота вокруг вертикальной оси вычисляется на основе смежной полосы 200 дорожной разметки, как показано посредством вышеприведенного выражения (2), вычисление угла φf не ограничивается посредством использования поперечного смещения Xf. В противном случае, например, полоса 200 дорожной разметки, определяемая рядом с упомянутым транспортным средством MM, идет на большое расстояние, и затем угол φf поворота вокруг вертикальной оси может быть вычислен на основе таким образом идущей полосы 200 дорожной разметки. Способ вычисления (на основе прямого изображения транспортного средства) поперечного смещения Xf упомянутого транспортного средства MM, кривизны β полосы движения, угла φf поворота вокруг вертикальной оси и т.п. является текущим уровнем техники, который уже приспосабливается для различных устройств (к примеру, контроллера движения в рамках полосы движения и т.п.) для управления упомянутым транспортным средством MM посредством распознавания полосы 200 дорожной разметки. Таким образом, подробное пояснение такого известного способа вычисления опускается.
<Этап S50>
На этапе S50, состояние обгона упомянутого транспортного средства MM относительно помехи SM определяется.
Определение состояния обгона реализуется на основе информации относительного расстояния Dist, относительной скорости Relvsp и угла Angle определения, которые являются информацией помехи SM (определяемой в отношении упомянутого транспортного средства MM), определяемой посредством радарных устройств 24L/24R (детектора 50 помех сбоку). Взаимосвязь между относительным расстоянием Dist, относительной скоростью Relvsp и углом Angle определения показывается на фиг.2.
Относительное расстояние Dist является расстоянием помехи SM относительно упомянутого транспортного средства MM и является эквивалентным относительному продольному положению DISTobst. Относительная скорость Relvsp является скоростью упомянутого транспортного средства MM относительно помехи SM и может быть вычислена, например, посредством дифференцирования относительного продольного положения DISTobst. Относительная скорость Relvsp задается положительной, когда упомянутое транспортное средство MM находится в направлении от помехи SM сбоку (когда скорость V упомянутого транспортного средства в направлении движения упомянутого транспортного средства MM превышает скорость помехи SM). Угол Angle определения является углом определения помехи SM относительно упомянутого транспортного средства MM и может обнаруживаться из относительного поперечного положения POSXobst и относительного продольного положения DISTobst. Угол Angle определения задается равным 0 градусам, когда помеха SM находится в положении, непосредственно поперечном упомянутому транспортному средству MM. Затем, в отношении положения, непосредственно поперечного упомянутому транспортному средству MM, угол Angle определения становится больше по мере того, как положение помехи SM относительно упомянутого транспортного средства MM размещается в направлении в большей степени сзади упомянутого транспортного средства MM. Угол Angle определения задается равным 90 градусов, когда помеха SM находится в положении, сразу следующем за упомянутым транспортным средством MM. В данном документе, непосредственно поперечное положение может задаваться, например, в качестве непосредственно поперечного положения за положением для задания радарных устройств 24L/24R или непосредственно поперечного положения за центром силы тяжести транспортного средства.
Затем, когда следующие условия (a)-(c) удовлетворяются, определяется то, что возможность того, что состояние обгона установлено, является высокой, на основе информации помехи SM слева в отношении упомянутого транспортного средства MM. В противном случае, определение в отношении того, что возможность того, что состояние обгона установлено, является высокой, может быть выполнено, когда любое из следующих условий (a)-(c) удовлетворяется. Тем не менее, для более точного определения, что возможность того, что состояние обгона установлено, является высокой, удовлетворение всем условиям (a)-(c) является предпочтительным.
(a) относительное расстояние Dist>пороговое значение KD1 определения относительного расстояния Dist
(b) относительная скорость Relvsp>пороговое значение KR1 определения относительной скорости Relvsp
(c) угол Angle определения>пороговое значение KA1 определения угла Angle определения
В данном документе, пороговое значение KD1 определения относительного расстояния Dist задается, например, равным 3 м. Пороговое значение KR1 определения относительной скорости Relvsp задается, например, равным 2-3 м/с. Пороговое значение KA1 определения угла Angle определения задается, например, равным 40-45 градусам. В данном документе, состояние обгона задается как первое состояние, в котором упомянутое транспортное средство MM может изменять полосу движения на сторону помехи SM после того, как упомянутое транспортное средство MM обогнало помеху SM, или второе состояние, в котором такая возможность смены полосы движения оценивается. Таким образом, пороговые значения KD1, KR1 и KA1 определения задаются через эмпирические значения или эксперименты на основе вышеуказанных первого или второго состояний.
<Этап S55>
Затем, когда определение в отношении того, что возможность того, что состояние обгона установлено, является высокой, продолжается в течение известного времени для определения обгона (или когда обработки прерывания реализуются непрерывно на известной частоте), определение того, установлено или нет состояние обгона, выполняется на этапе S55. Определение вышеуказанного продолжения может быть выполнено на основе значений счетчика, используемого для подсчета обработок. В противном случае, тем не менее, даже когда определение в отношении того, что возможность того, что состояние обгона установлено, является высокой, не продолжается в течение известного времени для определения обгона, при условии, что вышеуказанные условия (a)-(c) удовлетворяются, определение того, установлено или нет состояние обгона, может быть выполнено на этапе S55. Согласно первому варианту осуществления, для точного выполнения определения, что возможность того, что состояние обгона установлено, является высокой, определение того, продолжается или нет состояние обгона в течение известного времени для определения обгона, выполняется, как указано выше.
Кроме того, на этапе S55, на основе информации помехи SM слева в отношении упомянутого транспортного средства MM, величина αL1 точности обгона слева вычисляется, как показано на фиг.5.
Т.е. на основе следующего выражения, величина αL1 точности обгона слева вычисляется. В данном документе, когда на этапе S50 определяется то, что условия (a)-(c) не удовлетворяются, величина αL1 точности обгона слева задается равной 1 на этом этапе S55.
αL1=KD(Dist) × KR(Relvsp) × KA(Angle)
В данном документе, KD(Dist) является значением, вычисленным с относительным расстоянием Dist в качестве переменной и на основе схемы, показанной в модуле 501a вычисления первой величины точности обгона на фиг.5. KD(Dist) становится известным значением, когда относительное расстояние Dist меньше или равно пороговому значению KD1 определения относительного расстояния Dist, при этом KD(Dist) становится меньше, когда относительное расстояние Dist становится превышающим пороговое значение KD1 определения относительного расстояния Dist. Вместо схемы, KD(Dist) может быть вычислен следующим образом: схема, показанная на фиг.5, запоминается заранее в качестве функции, и затем таким образом запомненная функция используется.
KR(Relvsp) вычисляется с относительной скоростью Relvsp в качестве переменной и на основе схемы, показанной в модуле 501b вычисления второй величины точности обгона на фиг.5. KR(Relvsp) становится известным значением, когда относительная скорость Relvsp меньше или равна пороговому значению KR1 определения относительной скорости Relvsp, при этом KR(Relvsp) становится меньше, когда относительная скорость Relvsp становится превышающей пороговое значение KR1 определения. Вместо схемы, KR(Relvsp) может быть вычислен следующим образом: схема, показанная на фиг.5, запоминается заранее в качестве функции, и затем таким образом запомненная функция используется.
KA(Angle) вычисляется с углом Angle определения в качестве переменной и на основе схемы, показанной в модуле 501c вычисления третьей величины точности обгона на фиг.5. KA(Angle) становится известным значением, когда угол Angle определения меньше или равен пороговому значению KA1 определения угла Angle определения, при этом KA(Angle) становится меньше, когда угол Angle определения превышает пороговое значение KA1 определения. Вместо схемы, KA(Angle) может быть вычислен следующим образом: схема, показанная на фиг.5, запоминается заранее в качестве функции, и затем таким образом запомненная функция используется.
Затем, когда величина αL1 точности обгона слева становится меньшей или равной известному пороговому значению определения обгона, определяется то, что состояние обгона установлено. Пороговое значение определения обгона задается равным меньше 1. Это пороговое значение определения обгона варьируется в зависимости от того, до какой степени точность определения обгона задается. Тем не менее, пороговое значение определения обгона может задаваться из экспериментов или эмпирических значений.
В данном документе, фиг.5 является блок-схемой, показывающей принцип вычисления величины αL1 точности обгона слева. Со ссылкой на блок-схему, приводится пояснение примеров обработки для вычисления величины αL1 точности обгона слева.
На основе относительного расстояния Dist, модуль 501a вычисления первой величины точности обгона вычисляет первую величину KD(Dist) точности обгона посредством обращения к схеме вычисления первой величины точности обгона.
В данном документе, схема вычисления первой величины точности обгона имеет ординату, представляющую первую величину KD точности обгона, и абсциссу, представляющую относительное расстояние Dist. Затем, схема вычисления первой величины точности обгона задается таким образом, что KD=1 удовлетворяется до тех пор, пока относительное расстояние Dist не достигает своего порогового значения KD1 определения, и затем в области выше порогового значения KD1 определения, чем больше относительное расстояние Dist, тем меньше первая величина KD точности обгона.
На основе относительной скорости Relvsp, модуль 501b вычисления второй величины точности обгона вычисляет вторую величину KR(Relvsp) точности обгона посредством обращения к схеме вычисления второй величины точности обгона.
В данном документе, схема вычисления второй величины точности обгона имеет ординату, представляющую вторую величину KR точности обгона, и абсциссу, представляющую относительную скорость Relvsp. Затем, схема вычисления второй величины точности обгона задается таким образом, что KR=1 удовлетворяется до тех пор, пока относительная скорость Relvsp не достигает своего порогового значения KR1 определения, и затем в области выше порогового значения KR1 определения, чем больше относительная скорость Relvsp, тем меньше вторая величина KR точности обгона.
На основе угла Angle определения помехи SM сзади сбоку, модуль 501c вычисления третьей величины точности обгона вычисляет третью величину KA(Angle) точности обгона посредством обращения к схеме вычисления третьей величины точности обгона.
В данном документе, схема вычисления третьей величины точности обгона имеет ординату, представляющую третью величину точности обгона KA, и абсциссу, представляющую угол Angle определения. Затем, схема вычисления третьей величины точности обгона задается таким образом, что KA=1 удовлетворяется до тех пор, пока угол Angle определения не достигает своего порогового значения KA1 определения, и затем в области выше порогового значения KA1 определения, чем больше угол Angle определения, тем меньше третья величина KA точности обгона.
В данном документе, каждая из первой, второй и третьей величин KD, KR и KA точности обгона задается так, что она имеет нижний предел (>0).
Согласно первому варианту осуществления, точность определения состояния обгона может быть определена как более высокая в следующих условиях: чем больше относительное расстояние Dist, тем больше относительная скорость Relvsp и тем ближе к 90 градусов угол Angle определения.
Вывод 501d величины точности обгона принимает (вводит) первую, вторую и третью величины KD, KR и KA точности обгона и выводит конечную величину αL1 точности обгона. В данном документе, первая, вторая и третья величины KD, KR и KA точности обгона умножаются, чтобы тем самым вычислять величину αL1 точности обгона.
В данном документе, определение состояния обгона реализуется, например, посредством того, удовлетворяется или нет следующее выражение.
αL1<D_αL1
Выше, D_αL1 является известным значением (пороговым значением определения обгона), обнаруживаемым посредством экспериментов и т.п., и меньше или равно 1. Для задания более высокой точности определения состояния обгона, D_αL1 может задаваться равным небольшому значению, к примеру, 0,5. В данном документе, когда αL1 меньше 1, определяется то, что любое из вышеуказанных условий (a)-(c) удовлетворяется. Затем, указывается то, что чем меньше αL1, тем выше точность определения состояния обгона.
Кроме того, посредством реализации аналогичных обработок, величина αR1 точности обгона справа вычисляется посредством аналогичного определения на основе информации помехи SM справа относительно упомянутого транспортного средства MM. Как упомянуто выше, когда на этапе S50 определяется то, что возможность того, что состояние обгона установлено, является высокой, то, установлено или нет состояние обгона, определяется на основе точности состояния обгона на этапе S55, чтобы тем самым точно определять то, что состояние обгона установлено.
В данном документе, когда состояние, в котором величина αL1 (αR1) точности обгона, показывающая точность определения состояния обгона, становится меньшей или равной известному пороговому значению определения обгона (<1) (состояние в процессе определения состояния обгона), продолжается в течение известного времени, флаг F_Overtake, показывающий определение состояния обгона, задается равным "1". В противном случае, когда величина αL1 (αR1) точности обгона, показывающая точность определения состояния обгона, становится меньшей или равной известному пороговому значению определения обгона (<1) (определения того, что состояние обгона установлено), флаг F_Overtake, показывающий определение состояния обгона, может задаваться равным "1" без ожидания продолжения известного времени. Согласно первому варианту осуществления, для более надежного определения того, что состояние обгона установлено, необходимо определять то, продолжается или нет состояние обгона в течение известного времени. Помимо этого, когда состояние отсутствия обгона установлено, флаг F_Overtake, показывающий определение состояния обгона, задается равным "0".
В данном документе, для вычисления величины αL1 (αR1) точности обгона на этапе S55, иллюстрируется то, что все из относительного расстояния Dist, относительной скорости Relvsp и угла Angle определения используется. В противном случае, величина αL1 (αR1) точности обгона может быть вычислена посредством одной или двух из этих трех частей информации помех.
Помимо этого, определение состояния обгона на этапе S55 может быть выполнено посредством следующих обработок.
Т.е. флаг F_ObstFront2Rear определения задается. Когда помеха SM в качестве цели перемещается из прямого направления упомянутого транспортного средства MM в боковое или заднее направление упомянутого транспортного средства MM, флаг F_ObstFront2Rear определения задается равным "1" до тех пор, пока помеха SM не находится на большом расстоянии от диапазона распознавания. Затем, следующая операция разрешается: когда флаг F_ObstFront2Rear определения равен 1, и величина αL1 (αR1) точности обгона становится меньшей или равной пороговому значению определения состояния обгона, определяется то, что состояние обгона установлено, чтобы тем самым задавать флаг F_Overtake (показывающий определение состояния обгона) равным 1. Это позволяет более точно определять то, что состояние обгона установлено.
Помимо этого, флаг F_Overtake, показывающий определение состояния обгона, сбрасывается до "0", когда αL1 (αR1) становится выше порогового значения определения состояния обгона (не в состоянии определения состояния обгона).
Пороговое значение αL1 (αR1), которое используется, когда флаг F_Overtake, показывающий определение состояния обгона, сбрасывается до "0", может иметь гистерезис в направлении, в котором флаг F_Overtake с меньшей вероятностью должен отменяться. Т.е. пороговое значение цели подавления задается выше порогового значения для определения того, что состояние обгона установлено. Кроме того, следующая операция разрешается: когда флаг F_Overtake, показывающий определение состояния обгона, задается, флаг F_Overtake задается равным "0" в случае, когда целевой объект не определяется.
Кроме того, после того, как флаг F_Overtake, показывающий определение состояния обгона, задается равным "1", флаг F_Overtake поддерживается в течение известного времени и затем очищается (задается равным "0"). В данном документе, известное время для очистки флага F_Overtake может быть i) просто временем или ii) временем от момента времени определения состояния обгона до момента времени, когда пройденное расстояние упомянутого транспортного средства MM становится известным расстоянием, заданным заранее. Т.е. при условии, что пройденное расстояние от момента времени определения состояния обгона становится превышающим или равным известному расстоянию, заданному заранее, флаг F_Overtake может быть очищен. В противном случае, например, вышеуказанное известное время может быть временем до тех пор, пока относительное расстояние между упомянутым транспортным средством MM, и помеха SM не становится превышающим известное расстояние. Вышеуказанное известное время может надлежащим образом варьироваться.
<Этап S60>
Затем, на этапе S60, выполняется определение того, присутствует или нет намерение операции смены полосы движения (водителем) в сторону помехи SM.
Согласно первому варианту осуществления, на основе информации операции руления и операции ускорения водителем выполняется определение в отношении того, имеет или нет водитель намерение операции смены полосы движения к помехе SM слева. Например, как указано в дальнейшем в этом документе, через увеличенный угол δ поворота рулевого колеса, угловую скорость Dδ поворота рулевого колеса, величину θt нажатия педали акселератора (или открытие θt акселератора) и сигнал смены направления (указатель поворота) упомянутого транспортного средства MM, величина αL2 точности определения смены полосы движения (водителем) в направлении помехи SM слева вычисляется. В данном документе, увеличенный угол δ поворота рулевого колеса может быть вычислен посредством информации угла (δ) поворота рулевого колеса из датчика 19 угла поворота рулевого колеса. Угловая скорость Dδ поворота рулевого колеса может быть вычислена посредством дифференцирования информации угла (δ) поворота рулевого колеса из датчика 19 угла поворота рулевого колеса. Величина θt нажатия педали акселератора может быть вычислена посредством информации открытия (θt) акселератора из датчика 18 открытия акселератора.
Затем, величина αL2 точности определения смены полосы движения влево вычисляется посредством следующего выражения.
αL2=Kt (сигнал смены направления) × Ks(δ) × KDs (Dδ) × KAc (θt)
Обработка вычисления величины αL2 точности определения смены полосы движения влево изложена со ссылкой на фиг.6.
Фиг.6 является блок-схемой, показывающей принцип вычисления величины αL2 точности определения смены полосы движения влево.
На основе сигнала смены направления, модуль 601a вычисления первой величины точности определения смены полосы движения вычисляет первую величину Kt точности определения смены полосы движения посредством обращения к схеме вычисления первой величины точности определения смены полосы движения.
В данном документе, когда сигнал смены направления для смены полосы движения влево не присутствует, схема вычисления первой величины точности определения смены полосы движения задает первую величину Kt точности определения смены полосы движения = 1, в то время как, когда сигнал смены направления для смены полосы движения влево определяется, схема вычисления первой величины точности определения смены полосы движения задает первую величину Kt точности определения смены полосы движения = 0.
На основе угла δ поворота рулевого колеса, модуль 601b вычисления второй величины точности определения смены полосы движения вычисляет вторую величину Ks точности определения смены полосы движения посредством обращения к схеме вычисления второй величины точности определения смены полосы движения.
В данном документе, схема вычисления второй величины точности определения смены полосы движения имеет ординату, представляющую вторую величину Ks точности определения смены полосы движения, и абсциссу, представляющую угол δ поворота рулевого колеса. Затем, схема вычисления второй величины точности определения смены полосы движения задается таким образом, что Ks = 1 удовлетворяется, когда угол δ поворота рулевого колеса меньше или равен своему пороговому значению определения 81, и затем в области выше порогового значения определения 81, чем больше угол δ поворота рулевого колеса, тем меньше вторая величина Ks точности определения смены полосы движения.
На основе угловой скорости Dδ поворота рулевого колеса, модуль 601c вычисления третьей величины точности определения смены полосы движения вычисляет третью величину KDs точности определения смены полосы движения посредством обращения к схеме вычисления третьей величины точности определения смены полосы движения.
В данном документе, схема вычисления третьей величины точности определения смены полосы движения имеет ординату, представляющую третью величину KDs точности определения смены полосы движения, и абсциссу, представляющую угловую скорость Dδ поворота рулевого колеса. Затем, схема вычисления третьей величины точности определения смены полосы движения задается таким образом, что KDs = 1 удовлетворяется, когда угловая скорость Dδ поворота рулевого колеса меньше или равна своему пороговому значению определения Dδ1, и затем в области выше порогового значения определения Dδ1, чем больше угловая скорость Dδ поворота рулевого колеса, тем меньше третья величина KDs точности определения смены полосы движения.
На основе величины θt нажатия педали акселератора, модуль 601d вычисления четвертой величины точности определения смены полосы движения вычисляет четвертую величину KAc точности определения смены полосы движения посредством обращения к схеме вычисления четвертой величины точности определения смены полосы движения.
В данном документе, схема вычисления четвертой величины точности определения смены полосы движения имеет ординату, представляющую четвертую величину KAc точности определения смены полосы движения, и абсциссу, представляющую величину θt нажатия педали акселератора. Затем, схема вычисления четвертой величины точности определения смены полосы движения задается таким образом, что Kac = 1 удовлетворяется, когда величина θt нажатия педали акселератора меньше или равна своему пороговому значению определения θtl, и затем в области выше порогового значения определения θtl, чем больше величина θt нажатия педали акселератора, тем меньше четвертая величина KAc точности определения смены полосы движения.
Помимо этого, хотя не показано на фиг.6, следующая операция разрешается: предоставление модуля вычисления пятой величины точности определения смены полосы движения и вычисление пятой величины точности определения смены полосы движения на основе скорости нажатия педали акселератора посредством обращения к схеме вычисления пятой величины точности определения смены полосы движения. Эта схема вычисления пятой величины точности определения смены полосы движения имеет ординату, представляющую пятую величину точности определения смены полосы движения, и абсциссу, представляющую скорость нажатия педали акселератора. Затем, схема вычисления пятой величины точности определения смены полосы движения задается таким образом, что пятая величина точности определения смены полосы движения = 1 удовлетворяется, когда скорость нажатия педали акселератора меньше или равна своему пороговому значению определения, и затем в области выше порогового значения определения скорости нажатия педали акселератора, чем больше скорость нажатия педали акселератора, тем меньше пятая величина точности определения смены полосы движения.
Помимо этого, каждая из второй-пятой величин точности определения смены полосы движения задается так, что она имеет нижний предел (>0).
Вывод 601e величины точности определения смены полосы движения принимает (вводит) первую-четвертую величины Kt, Ks, KDs и KAc точности определения смены полосы движения и выводит конечную величину αL2 точности определения смены полосы движения. В данном документе, первая-четвертая величины Kt, Ks, KDs и KAc точности определения смены полосы движения умножаются, чтобы тем самым вычислять величину αL2 точности определения смены полосы движения. Т.е. величина αL2 точности определения смены полосы движения вычисляется посредством следующего выражения.
αL2=Kt × Ks × KDs × KAc
Помимо этого, величина αL2 точности определения смены полосы движения может быть вычислена согласно любому из приращения угла поворота рулевого колеса, полученного, когда определяется то, что состояние обгона установлено, и приращения величины нажатия педали акселератора, полученного, когда определяется, что состояние обгона установлено.
В данном документе, в качестве увеличенного угла δ поворота рулевого колеса, например, может быть использована следующая разность: (δ=str_filt_light-str_filt_heavy), которая вычисляется на основе угла str_filt_heavy поворота рулевого колеса, полученного посредством подвергания информации угла поворота рулевого колеса фильтру, имеющему большую постоянную времени, и угла str_filt_light поворота рулевого колеса, полученного посредством подвергания информации угла поворота рулевого колеса фильтру, имеющему небольшую постоянную времени. Увеличенный угол δ поворота рулевого колеса, таким образом полученный, вычисляется как увеличенный угол поворота рулевого колеса, к которому применяется угловая скорость поворота рулевого колеса.
Затем, с точки зрения величины нажатия педали акселератора, увеличенная величина нажатия педали акселератора определяется в качестве разности, которая получается посредством (θt_filt_heavy-θt_filt_light), при этом информация θt_filt_heavy получается посредством подвергания информации открытия акселератора фильтру, имеющему большую постоянную времени, а информация θt_filt_light получается посредством подвергания информации открытия акселератора фильтру, имеющему небольшую постоянную времени. Величина нажатия педали акселератора, таким образом полученная, вычисляется как величина нажатия педали акселератора, к которой также применяется увеличенная скорость нажатия педали акселератора. Помимо этого, посредством определения скорости нажатия педали акселератора вместо открытия акселератора то, присутствует или нет намерение операции смены полосы движения, может определяться посредством скорости нажатия педали акселератора.
Помимо этого, когда информация угловой скорости поворота рулевого колеса или информация скорости нажатия педали акселератора используется, такие значения определяются в качестве мгновенного значения. Следовательно, максимум таким образом известного значения должен быть сохранен в течение известного времени (например, 1 секунды).
Помимо этого, величина αL2 точности определения смены полосы движения в направлении помехи справа вычисляется посредством аналогичного определения.
В вышеприведенном описании, конечная величина αL2 (αR2) точности определения смены полосы движения получается посредством произведения значений схемы, которые обнаружены посредством сигнала смены направления, информации угла δ поворота рулевого колеса, информации угловой скорости Dδ поворота рулевого колеса, информации величины θt нажатия педали акселератора. Тем не менее, выбор более низкого из этих значений может использоваться для получения величины αL2 (αR2) точности определения смены полосы движения. В противном случае, величина αL2 точности определения смены полосы движения может быть вычислена посредством использования одной или двух, или трех из первой-четвертой величин Kt, Ks, KDs и KAc точности определения смены полосы движения. Т.е. величина αL2 точности определения смены полосы движения может иметь любое значение, которое удовлетворяет следующему условию: точность становится больше (αL2 становится меньше), когда водитель реализует операцию руления с намерением смены полосы движения или когда водитель реализует операцию ускорения и т.п. с намерением смены полосы движения.
Затем, когда величина αL2 (αR2) точности определения смены полосы движения становится меньшей или равной известному пороговому значению определения для смены полосы движения (<1), определяется то, что определение того, что водитель имеет намерение смены полосы движения, выполнено. Когда намерение смены полосы движения определяется, флаг F_driverovertake_intention задается равным "1". Когда величина αL2 (αR2) точности определения смены полосы движения становится выше известного порогового значения определения для смены полосы движения (задание гистерезиса является предпочтительным), флаг F_driverovertake_intention задается равным "0". Т.е. в качестве условия для сброса флага F_driverovertake_intention до "0" должно определяться то, что величина αL2 (αR2) точности определения смены полосы движения становится меньшей или равной известному пороговому значению (гистерезис задается равным пороговому значению, так что маловероятно то, что флаг F_driverovertake_intention подавляется).
Затем, когда F_driverovertake_intention равен "0", F_Overtake перезаписывается с "0", даже когда F_Overtake равен "1".
Обработка на этом этапе S60 может опускаться.
<Этап S70>
Затем, на этапе S70, модуль 8 управления тормозной/движущей силой вычисляет нейтральную скорость φ'path поворота вокруг вертикальной оси на основе следующего выражения (3). Нейтральная скорость φ'path поворота вокруг вертикальной оси необходима для продолжения движения посредством упомянутого транспортного средства MM по проезжей дороге. Нейтральная скорость φ'path поворота вокруг вертикальной оси становится нулевой, когда упомянутое транспортное средство MM едет по прямой дороге. На искривленной дороге, тем не менее, нейтральная скорость φ'path поворота вокруг вертикальной оси должна изменяться в зависимости от кривизны β искривленной дороги. Таким образом, кривизна β полосы движения используется для вычисления нейтральной скорости φ'path поворота вокруг вертикальной оси.

В данном документе, нейтральная скорость φ'path поворота вокруг вертикальной оси для поддержания маршрута движения посредством упомянутого транспортного средства MM может получаться посредством использования среднего φ'ave нейтральной скорости φ'path поворота вокруг вертикальной оси в течение известного периода или посредством простого вычисления значения, которое обнаруживается посредством подвергания нейтральной скорости φ'path поворота вокруг вертикальной оси фильтру, имеющему большую постоянную времени.
<Этап S80>
На этапе S80, модуль 8 управления тормозной/движущей силой задает время Tt упреждающего отслеживания. Время Tt упреждающего отслеживания является известным временем для определения порогового значения для оценки случая, когда водитель осуществляет подъезд к помехе впоследствии. Например, время Tt упреждающего отслеживания задается равным 1 секунде.
Затем, целевая скорость ψdriver поворота вокруг вертикальной оси и коррекционная целевая скорость ψdrivercorrection поворота вокруг вертикальной оси вычисляются.
Целевая скорость ψdriver поворота вокруг вертикальной оси вычисляется из угла δ поворота рулевого колеса и скорости V транспортного средства, как показано посредством следующего выражения (4). Эта целевая скорость ψdriver поворота вокруг вертикальной оси является скоростью поворота вокруг вертикальной оси, которая должна вызываться посредством операции руления водителя. Т.е. целевая скорость ψdriver поворота вокруг вертикальной оси обозначает скорость поворота вокруг вертикальной оси, преднамеренно вызываемую водителем.

В данном документе, КВ обозначает усиление, предварительно определяемое согласно техническим требованиям и т.п. транспортного средства.
Кроме того, коррекционная целевая скорость ψdrivercorrection поворота вокруг вертикальной оси вычисляется посредством следующего выражения (5). Эта коррекционная целевая скорость ψdrivercorrection поворота вокруг вертикальной оси получается посредством вычитания нейтральной скорости φ'path поворота вокруг вертикальной оси (необходимой для движения по проезжей дороге) из целевой скорости ψdriver поворота вокруг вертикальной оси. Посредством этой операции влияние, вызываемое посредством операции руления для движения по искривленной дороге, исключается из целевой скорости ψdriver поворота вокруг вертикальной оси.

Т.е. коррекционная целевая скорость ψdrivercorrection поворота вокруг вертикальной оси является отклонением скорости поворота вокруг вертикальной оси, необходимой для движения по искривленной дороге (нейтральной скорости φ'path поворота вокруг вертикальной оси) от скорости поворота вокруг вертикальной оси, вызываемой посредством операции руления водителя (целевой скорости ψdriver поворота вокруг вертикальной оси). Помимо этого, коррекционная целевая скорость ψdrivercorrection поворота вокруг вертикальной оси задается в соответствии с намерением смены полосы движения водителя.
<Этап S90>
Затем, на этапе S90, посредством использования времени Tt упреждающего отслеживания, заданного на вышеуказанном этапе S80, и на основе следующего выражения (6), модуль 8 управления тормозной/движущей силой вычисляет расчетное положение ΔXb упомянутого транспортного средства, которое является поперечным положением упомянутого транспортного средства MM после времени Tt упреждающего отслеживания относительно текущего поперечного положения упомянутого транспортного средства MM (положения в направлении ширины проезжей дороги). Т.е. поперечное расстояние (расстояние в направлении ширины проезжей дороги) до поперечного положения 150 упомянутого транспортного средства MM после времени Tt упреждающего отслеживания от поперечного положения текущего упомянутого транспортного средства MM вычисляется как расчетное положение ΔXb упомянутого транспортного средства. Помимо этого, расчетное положение ΔXb упомянутого транспортного средства используется для определения того, должно или нет управление предотвращением относительно помехи SM начинаться, как описано далее.
 ,
,
где:
- φf: угол поворота вокруг вертикальной оси
- φm: целевая угловая скорость поворота вокруг вертикальной оси
- φm': целевое угловое ускорение поворота вокруг вертикальной оси
Кроме того, целевая угловая скорость φm поворота вокруг вертикальной оси предоставляется посредством следующего выражения (7).

Кроме того, целевое угловое ускорение φm' поворота вокруг вертикальной оси предоставляется посредством следующего выражения (8).
 ,
,
где для подготовки расчетного положения ΔXb упомянутого транспортного средства в размерности угла поворота вокруг вертикальной оси, расстояние L упреждающего отслеживания используется, чтобы тем самым предоставлять следующее выражение (9).
 ,
,
где расстояние L упреждающего отслеживания и время Tt упреждающего отслеживания удовлетворяют следующему выражению (10).
Расстояние L упреждающего отслеживания = Время Tt упреждающего отслеживания × скорость V транспортного средства (10)
С учетом вышеизложенных характеристик, заданное усиление K1 является значением со скоростью V транспортного средства в качестве функции. Кроме того, заданное усиление K2 является значением со скоростью V транспортного средства и временем Tt упреждающего отслеживания в качестве функции. Заданное усиление K3 является значением со скоростью V транспортного средства и второй степенью времени Tt упреждающего отслеживания в качестве функции.
Помимо этого, расчетное положение упомянутого транспортного средства MM может быть вычислено посредством отдельного вычисления компонента угла поворота рулевого колеса и компонента угловой скорости поворота рулевого колеса и затем выбора более высокого значения из них, как показано посредством следующего выражения (11).

<Этап S100>
Затем, на этапе S100, модуль 8 управления тормозной/движущей силой устанавливает порог определения для начала управления. Это пороговое значение определения определяет то, начинается или нет управление предотвращением относительно помехи SM сзади сбоку. В данном документе, на основе поперечного положения каждого из упомянутого транспортного средства MM и помехи SM после времени Tt упреждающего отслеживания, это определение начала управления предотвращением на этапе S100 определяет то, возможно или нет то, что упомянутое транспортное средство MM пересекает путь помехи SM после времени Tt упреждающего отслеживания. Даже когда на этапе S100 определяется то, что управление предотвращением должно начинаться, такое управление предотвращением не обязательно фактически начинается. То, начинается или нет управление предотвращением фактически, определяется на нижеописанном этапе S115.
Согласно первому варианту осуществления, с ΔO на фиг.7 в качестве вышеуказанного порогового значения определения, начало управления предотвращением определяется на основе этого порогового значения определения ΔO и расчетного положения ΔXb упомянутого транспортного средства. ΔO является поперечным относительным расстоянием между упомянутым транспортным средством MM и помехой SM, причем это расстояние определено посредством радарных устройств 24L/24R.
Кроме того, когда поперечное относительное расстояние ΔO между упомянутым транспортным средством MM и помехой SM не может быть точно вычислено, расстояние X2obst до помехи в качестве известного расстояния используется, чтобы тем самым устанавливать вышеуказанный порог определения. Расстояние X2obst до помехи является эквивалентным поперечному расстоянию до полосы 200 дорожной разметки от известного мнимого положения (положения в направлении ширины полосы движения), в котором помеха SM присутствует.
Расстояние X2obst до помехи становится 0, когда известное мнимое положение (положение в направлении ширины полосы движения), в котором помеха SM присутствует, задается как полоса 200 дорожной разметки, становится положительным при нахождении за пределами полосы 200 дорожной разметки и становится отрицательным при нахождении в полосе 200 дорожной разметки. Т.е. вышеуказанное пороговое значение определения задается таким образом, что поперечное смещение X0 упомянутого транспортного средства MM с прибавлением расстояния X2obst до помехи на фиг.7 задается как мнимое расстояние от упомянутого транспортного средства MM до помехи SM. В данном документе, поперечное смещение X0 на фиг.7 является эквивалентным поперечному смещению Xf, определяемому посредством вышеописанной части 13 захвата изображений.
Кроме того, известное пороговое значение Xthresh может задаваться как вышеуказанное пороговое значение определения. Это известное пороговое значение Xthresh получается посредством задания заранее того, на каком расстоянии упрежденное положение упомянутого транспортного средства (расчетное положение ΔXb упомянутого транспортного средства) находится от текущего положения. Когда расчетное положение ΔXb упомянутого транспортного средства становится превышающим известное пороговое значение Xthresh, водитель выполняет чрезмерно большую операцию руления, тем самым позволяя определять то, что упомянутое транспортное средство MM должно пересекать путь помехи SM после времени Tt упреждающего отслеживания. Таким образом, пороговое значение Xthresh задается равным такому большому значению, чтобы надежно определять то, что водитель упомянутого транспортного средства MM имеет намерение смены полосы движения.
В данном документе, используется система координат X-Y, в которой ось Y рассматривается в направлении вдоль проезжей дороги, а ось X рассматривается в направлении, перпендикулярном к проезжей дороге, т.е. направление ширины полосы движения используется. Затем, поперечное положение помехи SM определяется на оси X. На основе поперечного положения, получается поперечное относительное расстояние ΔO.
Помимо этого, область K-AREA определения помех, заданная в качестве области для определения помехи SM, задается таким образом, что она является известным продольно-поперечным положением в направлении позади и сбоку от упомянутого транспортного средства MM. Кроме того, продольное положение может быть задано таким образом, что чем больше относительная скорость Relvsp (подъезд помехи SM к упомянутому транспортному средству MM), тем больше область K-AREA определения помех.
<Этап S110>
Затем, на этапе S110, модуль 8 управления тормозной/движущей силой определяет то, осуществляет или нет упомянутое транспортное средство MM подъезд к помехе SM сзади сбоку. В данном документе, определение начала управления состоит в том, чтобы задавать флаг Fout_obst определения управления предотвращением подъезда к помехе на основе позиционной взаимосвязи между упомянутым транспортным средством MM и помехой SM. То, начинать или нет фактически управление, определяется на основе результата определения на нижеописанном этапе S115.
На этапе S110, когда следующее выражение (12) удовлетворяется (условие 1 начала), определяется то, что начало управления установлено.

В данном документе, расчетное положение ΔXb упомянутого транспортного средства относительно поперечного относительного расстояния ΔO обозначает градус осуществления подъезда к помехе SM. Т.е. это синонимично со следующим случаем: в направлении ширины полосы движения, задание положения помехи SM в качестве положения определения начала управления (начального положения 60 управления) и затем определение того, что начало управления установлено, когда упрежденное положение упомянутого транспортного средства (точка 150 упреждающего отслеживания) после времени Tt упреждающего отслеживания находится за пределами начального положения 60 управления в направлении ширины полосы движения. Помимо этого, положение внутри в направлении ширины полосы движения посредством известного расстояния от положения помехи SM может задаваться как положение определения начала управления (начальное положение 60 управления). В этом случае, поперечное относительное расстояние ΔO может быть скорректировано посредством вычитания известного расстояния из поперечного относительного расстояния ΔO.
Затем, с расстоянием X2obst до помехи, используемым в качестве порогового значения определения для начала управления, когда следующее выражение (13) удовлетворяется (условие 2 начала), определяется то, что начало управления установлено.

Т.е. как показано на фиг.7, определяется то, больше или равно поперечное расстояние ΔX2 между полосой 200 дорожной разметки и упрежденным расчетным положением упомянутого транспортного средства MM (точкой 150 упреждающего отслеживания) после времени Tt упреждающего отслеживания расстоянию X2obst до помехи или нет. Т.е. определяется то, в большей степени или нет поперечное положение упомянутого транспортного средства MM (точка 150 упреждающего отслеживания) после времени Tt упреждающего отслеживания за пределами (в направлении ширины полосы движения) известного положения расстояния X2obst до помехи относительно полосы 200 дорожной разметки. Затем, когда радарные устройства 24L/24R определяют то, что помеха SM присутствует в области K-AREA определения помех, и вышеуказанное условие 2 начала удовлетворяется, определяется то, что управление относительно помехи SM начинается. Когда определяется то, что управление относительно помехи SM начинается, флаг Fout_obst определения управления предотвращением подъезда к помехе устанавливается. С другой стороны, когда вышеуказанное условие не удовлетворяется, флаг Fout_obst определения управления предотвращением подъезда к помехе снимается.
Кроме того, пороговое значение Xthresh может быть использовано в качестве порогового значения определения для начала управления. В этом случае, когда радарные устройства 24L/24R определяют то, что помеха SM присутствует в области K-AREA определения помех, и следующее выражение (14) удовлетворяется (условие 3 начала), определяется то, что начало управления установлено.

В данном документе, расчетное положение ΔXb упомянутого транспортного средства фактически вычисляется для каждой из левой и правой сторон упомянутого транспортного средства MM, соответственно, как ΔXbL/ΔXbR, чтобы тем самым выполнять отдельные определения.
Кроме того, помеха SM в качестве цели управления может включать в себя не только транспортное средство в направлении позади и сбоку от упомянутого транспортного средства MM, но также и встречное транспортное средство в прямом направлении смежной полосы движения.
В данном документе, когда определяется то, меньше или нет расчетное положение ΔXb упомянутого транспортного средства порогового значения определения, гистерезисный эквивалент F может предоставляться, как обозначено посредством ΔXb < ΔO-F. Т.е. мертвая зона может задаваться. Более конкретно, мертвая зона может задаваться между пороговым значением прерывания управления и пороговым значением завершения управления.
Кроме того, флаг Fout_obst определения управления предотвращением подъезда к помехе может устанавливаться, когда Fout_obst снят. Кроме того, в качестве условия для установления заданного настраиваемым Fout_obst, связанное со временем условие может добавляться, например, после истечения известного времени после того, как Fout_obst снят. Кроме того, после истечения известного времени Tcontrol после того, как определение того, что Fout_obst установлен, выполнено, управление может завершаться посредством снятия Fout_obst.
Кроме того, когда управление предотвращением подъезда к помехе реализуется, направление Dout_obst реализации управления определяется согласно направлению определения упрежденного расчетного положения (точки 150 упреждающего отслеживания). Когда упрежденное расчетное положение (точка 150 упреждающего отслеживания) является левым, Dout_obst="левое", в то время как, когда упрежденное расчетное положение является правым, Dout_obst="правое".
В данном документе, когда антиблокировочная система тормозов (ABS), система регулирования тягового усилия (TCS) или система динамической стабилизации (VDC) работает, флаг Fout_obst определения управления предотвращением подъезда к помехе снимается. Это выполняется для деактивации управления предотвращением подъезда к помехе, когда управление автоматическим торможением, реализованное независимо от операции водителя, работает.
<Этап S115>
Затем, на этапе S115, на основе флага Fout_obst определения управления предотвращением подъезда к помехе и флага F_Overtake, который показывает определение состояния обгона, определяется то, реализовывать или нет управление предотвращением подъезда к помехе.
Когда флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, и F_Overtake=0, определяется то, что упомянутое транспортное средство MM осуществляет подъезд к помехе SM, чтобы тем самым сохранять установленным флаг Fout_obst определения управления предотвращением подъезда к помехе.
С другой стороны, когда флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, и F_Overtake=1, определяется то, что упомянутое транспортное средство MM обогнало помеху SM, и водитель имеет намерение смены полосы движения, чтобы тем самым сбрасывать (снимать) флаг Fout_obst определения управления предотвращением подъезда к помехе.
Кроме того, когда флаг Fout_obst определения управления предотвращением подъезда к помехе снят, флаг Fout_obst определения управления предотвращением подъезда к помехе сохраняется снятым независимо от F_Overtake.
Т.е. как указано выше, флаг F_Overtake, показывающий определение состояния обгона, задается равным "1" только тогда, когда определяется то, что упомянутое транспортное средство MM обогнало помеху SM, и что водитель упомянутого транспортного средства MM имеет намерение смены полосы движения. Таким образом, когда F_Overtake=1, оценивается то, что водитель имеет намерение смены полосы движения при распознавании помехи SM. Следовательно, в этом случае, даже когда флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, флаг Fout_obst определения управления предотвращением подъезда к помехе снимается, с тем чтобы не реализовывать (с тем чтобы подавлять) управление предотвращением подъезда к помехе.
С другой стороны, когда флаг F_Overtake, показывающий определение состояния обгона, задается равным "0", следующие первое и второе состояния задаются: первое состояние, в котором упомянутое транспортное средство MM не обогнало помеху SM, и второе состояние, в котором упомянутое транспортное средство MM обогнало помеху SM, и водитель не имеет намерения смены полосы движения. Таким образом, когда F_Overtake=0, и флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, оценивается то, что водитель осуществляет подъезд к помехе SM без распознавания помехи SM, или даже если водитель распознает помеху SM, упомянутое транспортное средство MM осуществляет подъезд к помехе SM без намерения смены полосы движения водителя. Следовательно, в этом случае, флаг Fout_obst определения управления предотвращением подъезда к помехе сохраняется установленным, чтобы тем самым реализовывать управление предотвращением подъезда к помехе.
Помимо этого, когда F_Overtake=1, следующая операция также разрешается: флаг Fout_obst определения управления предотвращением подъезда к помехе снимается, так что управление предотвращением подъезда к помехе не реализуется только на основе состоянии F_Overtake.
<Этап S120>
Затем, на этапе S120, обработки выдачи сигнала тревоги реализуются. Т.е. когда определяется то, что флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, формируется звук сигнала тревоги. Сигнал тревоги не ограничивается звуком сигнала тревоги, в ином случае может быть реализован посредством лампы или вибрации сиденья.
В данном документе, выдача сигнала тревоги может быть реализована раньше, чем момент, когда точка 150 упреждающего отслеживания на основе времени Tt упреждающего отслеживания (поперечное положение упомянутого транспортного средства MM после времени Tt упреждающего отслеживания) достигает положения начала управления. Т.е. время Tt упреждающего отслеживания умножается на известное усиление Kbuzz (>1), так что время превышает время Tt упреждающего отслеживания. Затем, посредством использования точки 150 упреждающего отслеживания на основе (Tt × Kbuzz), сигнал тревоги может быть сформирован, когда определяется то, что точка 150 упреждающего отслеживания, вычисленная на основе выражения (6), достигает порогового значения определения. В противном случае, когда определяется то, что операция управления предотвращением подъезда к помехе начинается, сигнал тревоги может принудительно вызываться, чтобы тем самым начинать управление после истечения известного времени. В противном случае, сигнал тревоги может быть сформирован в сочетании с состоянием, в котором управляющий вывод просто реализуется.
<Этап S130>
Затем, на этапе S130, модуль 8 управления тормозной/движущей силой задает целевой момент Ms поворота вокруг вертикальной оси.
Когда флаг Fout_obst определения управления предотвращением подъезда к помехе снят, целевой момент Ms поворота вокруг вертикальной оси задается равным 0. Затем, процесс переходит к этапу S140.
С другой стороны, когда флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, целевой момент Ms поворота вокруг вертикальной оси вычисляется посредством следующего выражения (18). Затем, процесс переходит к этапу S140.

В данном документе, K1recv является пропорциональным усилением, определенным из технических требований транспортного средства (момента инерции поворота вокруг вертикальной оси). K2recv является усилением, которое является переменным в соответствии со скоростью V транспортного средства. Усиление K2recv задается, например, так, что усиление K2recv становится больше в области более низкой скорости, становится обратно пропорциональным скорости V транспортного средства, когда скорость V транспортного средства достигает известного значения, и после этого становится постоянным при небольшом значении после того, как скорость V транспортного средства достигает известного значения. Заданное усиление K1mon является значением со скоростью V транспортного средства в качестве функции. Заданное усиление K2mon является значением со скоростью V транспортного средства и временем Tt упреждающего отслеживания в качестве функции.
Согласно выражению (18), по мере того, как постоянно формируемая скорость поворота вокруг вертикальной оси становится больше за счет угла φf поворота вокруг вертикальной оси относительно полосы 200 дорожной разметки или за счет увеличенной операции руления водителем, целевой момент Ms поворота вокруг вертикальной оси становится больше.
В противном случае, целевой момент Ms поворота вокруг вертикальной оси может быть вычислен из следующего выражения (19). Выражение (19) синонимично с умножением выражения (18) на заданное усиление K3 (=1/Tt2). Чем больше время Tt упреждающего отслеживания, тем меньше заданное усиление K3.

Использование вышеприведенного выражения (19) предоставляет следующий результат. Т.е. чем меньше время Tt упреждающего отслеживания, тем больше величина управления. Т.е. задание времени Tt упреждающего отслеживания так, что время начала управления задерживается, должно увеличивать величину управления в начале управления. Кроме того, задание времени упреждающего отслеживания Tt так, что время начала управления ускоряется, должно уменьшать величину управления. Как результат, величина управления задается для водителя таким образом, что она согласована с заданием точки 150 упреждающего отслеживания, тем самым позволяя реализовывать управление, которое подходит для данного случая и имеет небольшой дискомфорт.
Помимо этого, определение вышеуказанного Fout_obst оценивает упреждающую смену полосы движения на основе информации поворота рулевого колеса.
В данном документе, следующая операция разрешается. Кроме этого управления предотвращением подъезда к помехе, в случае если управление предотвращением отклонения от полосы движения для управления режимом работы упомянутого транспортного средства MM таким образом, чтобы не допускать отклонения от полосы движения, когда упомянутое транспортное средство MM имеет возможность задания отклонения от полосы, управление, начатое раньше (т.е. любое из этого управления предотвращением подъезда к помехе и управления предотвращением отклонения от полосы движения (Fout_LDP=1)), приоритезируется, а другое управление задается так, что оно не реализуется до тех пор, пока более раннее управление не завершается.
<Этап S140>
На этапе S140, модуль 8 управления тормозной/движущей силой вычисляет команду для принудительного задания целевого момента Ms поворота вокруг вертикальной оси для предотвращения приближения помехи SM и затем выводит команду. Затем, процесс возвращается к начальной обработке.
В данном документе, согласно первому варианту осуществления, в качестве показателя для принудительного задания целевого момента Ms поворота вокруг вертикальной оси для предотвращения подъезда к помехе SM приводится пример в случае, если момент поворота вокруг вертикальной оси принудительно задается посредством использования тормозной/движущей силы, как описано ниже.
Когда контроллер силы реакции при повороте колес используется в качестве показателя для принудительного задания момента поворота вокруг вертикальной оси, модуль 8 управления тормозной/движущей силой может вычислять силу Fstr реакции при повороте колес (Fstr = Ka·Ms) в качестве команды для принудительного задания целевого момента Ms поворота вокруг вертикальной оси и выводить силу Fstr реакции при повороте колес в контроллер силы реакции при повороте колес, чтобы тем самым принудительно задавать силу реакции. В данном документе, Ka обозначает коэффициент, полученный заранее посредством экспериментов и т.п., и преобразует момент поворота вокруг вертикальной оси в силу реакции при повороте колес.
Кроме того, когда контроллер угла поворота рулевого колеса используется в качестве показателя для принудительного задания момента поворота вокруг вертикальной оси, модуль 8 управления тормозной/движущей силой может вычислять угол STRθ поворота рулевого колеса (STRθ = Kb·Ms) в качестве команды для принудительного задания целевого момента Ms поворота вокруг вертикальной оси и выводить угол STRθ поворота рулевого колеса в контроллер угла поворота рулевого колеса, чтобы тем самым управлять углом поворота рулевого колеса. В данном документе, Kb обозначает коэффициент, полученный заранее посредством экспериментов и т.п., и преобразует момент поворота вокруг вертикальной оси в угол поворота рулевого колеса.
Кроме того, когда контроллер усилия на ободе рулевого колеса, к примеру, рулевой привод с усилителем и т.п. используется в качестве показателя для принудительного задания момента поворота вокруг вертикальной оси, модуль 8 управления тормозной/движущей силой может вычислять усилие на ободе рулевого колеса (крутящий момент поворота рулевого колеса) (STRtrg = Kc·Ms) в качестве команды для принудительного задания целевого момента Ms поворота вокруг вертикальной оси и может выводить усилие на ободе рулевого колеса в контроллер усилия на ободе рулевого колеса, чтобы тем самым управлять усилием на ободе рулевого колеса. В данном документе, Kc обозначает коэффициент, полученный заранее посредством экспериментов и т.п., и преобразует момент поворота вокруг вертикальной оси в угол поворота рулевого колеса.
Согласно первому варианту осуществления, в случае если разность тормозных сил между правыми и левыми колесами транспортного средства принудительно задается в качестве показателя для принудительного задания момента поворота вокруг вертикальной оси, модуль 8 управления тормозной/движущей силой вычисляет команду для принудительного задания момента Ms поворота вокруг вертикальной оси, как указано ниже.
Когда целевой момент Ms поворота вокруг вертикальной оси равен 0, т.е. когда управление моментом поворота вокруг вертикальной оси не реализуется, давления Pmf, Pmr тормозной жидкости (давление тормозной жидкости) в качестве целевого давления Psi тормозной жидкости (i = fl, fr, rl, rr) каждого колеса выводятся в контроллер 7 давления тормозной жидкости, как показано в нижеприведенных выражениях (20) и (21). Вследствие этого, контроллер 7 давления тормозной жидкости управляет схемой 30 давления жидкости, чтобы тем самым управлять давлением тормозной жидкости каждого колеса согласно целевому давлению Psi тормозной жидкости (i = fl, fr, rl, rr).

В данном документе, Pmf обозначает давление тормозной жидкости для переднего колеса. Pmr обозначает давление тормозной жидкости для заднего колеса и является значением, вычисленным на основе давления Pmf тормозной жидкости для переднего колеса с учетом распределения между передними и задними колесами. Например, когда водитель выполняет операцию торможения, давления Pmf, Pmr тормозной жидкости становятся значениями в соответствии с рабочей величиной (давлением Pm жидкости в главном цилиндре) операции торможения.
С другой стороны, когда абсолютное значение целевого момента Ms поворота вокруг вертикальной оси больше 0, т.е. когда управление предотвращением подъезда к помехе реализуется, следующие обработки реализуются.
В частности, на основе целевого момента Ms поворота вокруг вертикальной оси, разность ΔPsf целевых давлений тормозной жидкости для передних колес и разность ΔPsr целевых давлений тормозной жидкости для задних колес вычисляются. Более конкретно, разности ΔPsf, ΔPsr целевых давлений тормозной жидкости, соответственно, вычисляются посредством следующих выражений (22) и (23).

В данном документе, FR-соотношение обозначает пороговое значение задания, Tr обозначает колею, а Kbf и Kbr обозначают коэффициенты преобразования передних и задних колес для преобразования тормозной силы в давление тормозной жидкости.
Помимо этого, в данном документе для удобства, колея Tr имеет идентичное значение для передних и задних колес. Кроме того, Kbf, Kbr являются коэффициентами, которые предварительно определяются посредством технических требований по торможению.
Таким образом, тормозные силы, вызываемые для колес, выделяются согласно показателю целевого момента Ms поворота вокруг вертикальной оси. Т.е. известное значение предоставляется каждой из разностей ΔPsf, ΔPsr целевых давлений тормозной жидкости, чтобы тем самым принудительно задавать разность тормозных сил между правыми и левыми колесами спереди и сзади. Затем, таким образом вычисленные разности ΔPsf, ΔPsr целевых давлений тормозной жидкости используются, чтобы тем самым вычислять конечное целевое давление Psi тормозной жидкости (i = fl, fr, rl, rr) каждого колеса.
В частности, когда направление Dout_obst реализации управления является левым, т.е. в случае, если управление предотвращением подъезда к помехе относительно помехи SM слева реализуется, целевое давление Psi тормозной жидкости (i = fl, fr, rl, rr) каждого колеса вычисляется посредством следующего выражения (24).
С другой стороны, когда направление Dout_obst реализации управления является правым, т.е. в случае, если управление предотвращением подъезда к помехе относительно помехи SM справа реализуется, целевое давление Psi тормозной жидкости (i = fl, fr, rl, rr) каждого колеса вычисляется посредством следующего выражения (25).

Согласно вышеприведенным выражениям (24) и (25), разность тормозных/движущих сил между правыми и левыми колесами принудительно задается так, что тормозная сила колеса на стороне для предотвращения помехи (т.е. стороне напротив направления, в котором помеха SM присутствует) становится превышающей тормозную силу колеса на стороне помехи SM (т.е. стороне, на которой помеха SM присутствует).
Кроме того, в данном документе, как показано посредством выражений (24) и (25), с учетом операции торможения водителем, т.е. давлений Pmf, Pmr тормозной жидкости, целевое давление Psi тормозной жидкости (i = fl, fr, rl, rr) каждого колеса вычисляется.
Затем, в контроллер 7 давления тормозной жидкости, модуль 8 управления тормозной/движущей силой выводит таким образом вычисленное целевое давление Psi тормозной жидкости (i = fl, fr, rl, rr) каждого колеса в качестве значения команды управления давлением тормозной жидкости. Посредством этой операции, контроллер 7 давления тормозной жидкости управляет схемой 30 давления жидкости, чтобы тем самым управлять давлением тормозной жидкости каждого колеса согласно целевому давлению Psi тормозной жидкости (i = fl, fr, rl, rr).
Работа
Далее поясняется пример работы первого варианта осуществления.
Теперь, предполагается, что упомянутое транспортное средство MM движется параллельно с помехой MM направлении слева сзади. В этом случае, упомянутое транспортное средство MM не находится в состоянии обгона помехи SM, тем самым задавая величину αL1 точности обгона слева = 1 (этап S50). Таким образом, флаг F_Overtake, показывающий определение состояния обгона, равен "0" (этап S55).
Затем, на основе угла φf поворота вокруг вертикальной оси, целевой угловой скорости φm поворота вокруг вертикальной оси, целевого углового ускорения φm' поворота вокруг вертикальной оси и т.п., которые обозначают состояние движения упомянутого транспортного средства MM, расчетное положение ΔXb упомянутого транспортного средства вычисляется как упрежденное положение упомянутого транспортного средства после времени Tt упреждающего отслеживания (этап S90). Затем, упомянутое транспортное средство MM перемещается в сторону помехи SM посредством операции руления водителем и т.п., тем самым расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени упреждающего отслеживания (Tt·Kbuzz) для сигнала тревоги, становится превышающим или равным ΔO, чтобы тем самым выдавать сигнал тревоги водителю (этап S120). Кроме того, когда водитель не может реализовывать регулирование пути и т.п. упомянутого транспортного средства MM, и расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания для управления, становится превышающим или равным ΔO, определяется то, что управление помощью при вождении для предотвращения помехи SM начато (этап S110).
После того, как определение того, что управление помощью при вождении начинается, выполнено, целевой момент Ms поворота вокруг вертикальной оси вычисляется как величина управления на основе расчетного положения ΔXb упомянутого транспортного средства (этап S130). Затем, тормозная/движущая сила (давление тормозной жидкости) управляется таким образом, чтобы принудительно задавать таким образом вычисленный целевой момент Ms поворота вокруг вертикальной оси (этап S140). Посредством этого, режим работы упомянутого транспортного средства MM управляется в направлении для предотвращения подъезда к помехе SM (управление предотвращением подъезда к помехе реализуется).
Таким образом, когда водитель выполняет операцию руления в направлении для подъезда к помехе SM без распознавания помехи SM, подъезд к помехе SM упомянутого транспортного средства MM может надлежащим образом не допускаться.
С другой стороны, как показано на фиг.8, после обгона помехи SM водитель выполняет операцию руления в направлении для подъезда к помехе SM. В этом случае, определяется то, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM, тем самым задавая величину αL1 точности обгона слева < 1 (этап S50). Кроме того, флаг F_Overtake, показывающий определение (которое выполняется на основе величины αL1 точности обгона слева) состояния обгона, становится равным "1" (этап S55).
Когда водитель выполняет операцию руления к помехе SM (операцию руления в направлении α на фиг.8) после обгона помехи SM слева, расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания для управления, становится превышающим или равным ΔO, тем самым определяется то, что управление предотвращением подъезда к помехе начинается. Тем не менее, поскольку состояние обгона установлено, управление предотвращением подъезда к помехе не реализуется в качестве подавления начала управления предотвращением подъезда к помехе, которое не допускает подъезда к помехе SM, согласно первому варианту осуществления.
Как указано выше, когда определено, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM, управление предотвращением подъезда к помехе не реализуется. Т.е. когда определение того, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM, выполнено, начало управления предотвращением подъезда к помехе подавляется по сравнению с тем, когда такое определение не выполнено. Когда упомянутое транспортное средство MM обгоняет помеху SM, следует понимать, что водитель распознает помеху SM. Следовательно, в таком случае, подавление начала управления предотвращением подъезда к помехе может уменьшать дискомфорт водителя, который обусловлен следующими операциями: когда водитель распознает помеху SM и изменяет полосу движения на направление, в котором помеха SM присутствует, управление предотвращением подъезда к помехе в достаточной степени реализуется, и таким образом, упомянутое транспортное средство MM управляется таким образом, что оно отдаляется от помехи SM сбоку.
Кроме того, согласно первому варианту осуществления, величина αL2 точности определения смены полосы движения влево вычисляется (этап S60) в качестве определения намерения смены полосы движения. Затем, только когда определяется, на основе величины αL2 точности определения смены полосы движения влево, то, что водитель имеет намерение смены полосы движения, обработки реализуются таким образом, что флаг F_Overtake, показывающий определение состояния обгона, становится равным "1".
Как результат, только тогда, когда определено, что водитель преднамеренно выполняет смену полосы движения, начало вышеуказанного управления подавляется. Вследствие этого, дискомфорт, вызываемый у водителя, может быть более адекватно ослаблен.
В данном документе, радарные устройства 24L/24R включаются состав в детектор 50 помех сбоку. Этапы S100, S110, S120, S130 и S140 включаются в операции, реализованные посредством контроллера 8B предотвращения подъезда к помехе. Этапы S50 и S55 включаются в операции, реализованные посредством детектора 8C состояния обгона. Этап S60 включается в операции, реализованные посредством детектора 8D намерения смены. Этап S115 включается в операции, реализованные посредством модуля 8Ba подавления управления.
Эффект первого варианта осуществления
(1) Детектор 50 помех сбоку определяет помеху SM, присутствующую в области K-AREA определения помех, причем, по меньшей мере, направление позади и сбоку от упомянутого транспортного средства MM задается в качестве области K-AREA определения помех. Контроллер 8B предотвращения подъезда к помехе реализует управление предотвращением подъезда к помехе, которое не допускает подъезд упомянутого транспортного средства MM к помехе SM, определенной посредством детектора 50 помех сбоку. Детектор 8C состояния обгона, на основе информации помехи SM в отношении упомянутого транспортного средства MM, определяет состояние обгона, которое является, по меньшей мере, одним из первого состояния, в котором упомянутое транспортное средство MM обгоняет помеху SM, и второго состояния, в котором оценивается то, что упомянутое транспортное средство MM должно обгонять помеху SM. Модуль 8Ba подавления управления, когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора 8C состояния обгона, подавляет начало управления предотвращением подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено.
Когда упомянутое транспортное средство MM осуществляет подъезд к помехе SM, чтобы тем самым удовлетворять условию начала управления предотвращением подъезда к помехе, по меньшей мере, в одном из первого состояния, в котором упомянутое транспортное средство MM обгоняет помеху SM, и второго состояния, в котором оценивается то, что упомянутое транспортное средство MM должно обгонять помеху SM, предполагается, что водитель упомянутого транспортного средства MM имеет намерение смены полосы движения в сторону помехи SM при распознавании присутствия помехи. В таком случае, начало управления предотвращением подъезда к помехе подавляется, как результат, позволяя подавлять дискомфорт у водителя. Т.е. в то время как дискомфорт, вызываемый у водителя, уменьшается, управление помощью при вождении относительно помехи SM, присутствующей в направлении позади и сбоку от упомянутого транспортного средства MM, может быть надлежащим образом реализовано.
(2) Детектор 8D намерения смены определяет то, имеет или нет водитель намерение смены полосы движения. Когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора 8C состояния обгона, и намерение смены полосы движения определяется посредством детектора 8D намерения смены, модуль 8Ba подавления управления подавляет начало управления предотвращением подъезда к помехе.
Когда упомянутое транспортное средство MM обогнало помеху SM, подавление начала управления предотвращением подъезда к помехе может подавлять дискомфорт водителя. В этом случае, только тогда, когда определено, что водитель преднамеренно выполняет смену полосы движения, начало управления предотвращением подъезда к помехе подавляется. Как результат, когда водитель преднамеренно выполняет смену полосы движения при распознавании присутствия помехи SM, начало управления подавляется, тем самым позволяя более надежно не допускать дискомфорта.
(3) Информация помехи SM в отношении упомянутого транспортного средства MM включает в себя, по меньшей мере, одно из относительного расстояния Dist, относительной скорости Relvsp и угла Angle определения помехи SM относительно упомянутого транспортного средства MM.
Посредством этого, без необходимости использования специальных устройств, к примеру, связи между транспортными средствами, инфраструктурных и т.п., первый вариант осуществления может быть выполнен посредством общих устанавливаемых в транспортном средстве устройств, к примеру, радарных устройств 24L/24R и т.п.
(4) Управление предотвращением подъезда к помехе посредством контроллера 8B предотвращения подъезда к помехе реализует, по меньшей мере, одну обработку принудительного задания для упомянутого транспортного средства MM момента Ms поворота вокруг вертикальной оси в направлении от помехи SM и выдачи сигнала тревоги водителю о том, что упомянутое транспортное средство MM осуществляет подъезд к помехе SM.
Посредством этого, управление предотвращением подъезда упомянутого транспортного средства MM к помехе SM может быть выполнено.
МОДИФИЦИРОВАННЫЙ ПРИМЕР
(1) Согласно первому варианту осуществления, пояснение приводится на основе следующих операций: определение на этапе S50 состояния обгона упомянутого транспортного средства MM, затем определение на этапе S55 того, что состояние обгона установлено после истечения известного времени (постоянного времени), и затем подавление начала управления предотвращением подъезда к помехе.
Вместо вышеуказанных операций, следующие операции также разрешаются: определение состояния обгона упомянутого транспортного средства MM, затем определение того, что состояние обгона установлено, когда упомянутое транспортное средство MM проходит известное расстояние (другими словами, время для прохождения известного расстояния истекло), и затем подавление начала управления предотвращением подъезда к помехе. В этом случае, на основе скорости транспортного средства определяется, после истечения известного времени, то, что состояние обгона установлено.
Кроме того, следующие операции также разрешаются: определение состояния обгона упомянутого транспортного средства MM, затем определение того, что состояние обгона установлено, когда относительное расстояние Dist между упомянутым транспортным средством MM и помехой SM становится известным расстоянием (другими словами, время, необходимое для относительного расстояния Dist, чтобы становиться известным расстоянием, истекло), и затем подавление начала управления предотвращением подъезда к помехе.
(2) Согласно первому варианту осуществления, приводится пояснение того, что когда определение того, что состояние обгона установлено, выполнено, и намерение смены полосы движения определяется (определение того, что точность намерения смены полосы движения является высокой), начало управления подавляется. Тем не менее, только определение того, что состояние обгона установлено, может подавлять начало управления.
(3) Кроме того, согласно первому варианту осуществления, когда определение того, что состояние обгона установлено, выполнено, и намерение смены полосы движения определяется, начало управления подавляется. Тем не менее, когда определено, в ходе операции управления предотвращением подъезда к помехе, то, что состояние обгона установлено, подавление величины управления в настоящее время реализуемого управления (т.е. сокращение момента Ms поворота вокруг вертикальной оси) разрешается вместо подавления начала управления.
(4) Кроме того, согласно первому варианту осуществления, приводится пояснение того, что на основе операции водителя детектор 8D намерения смены определяет то, присутствует или нет намерение смены полосы движения. Вместо этого, то, присутствует или нет намерение смены полосы движения, может определяться на основе режима работы транспортного средства.
Т.е. на основе режима работы упомянутого транспортного средства MM, детектор 8D намерения смены определяет то, имеет или нет водитель намерение смены полосы движения.
Намерение смены полосы движения определяется на основе режима работы упомянутого транспортного средства. Посредством этого, когда водитель неумышленно отклоняет упомянутое транспортное средство MM от полосы движения, управление предотвращением подъезда к помехе реализуется, между тем, когда водитель преднамеренно изменяет полосу движения, начало неудобного управления предотвращением подъезда к помехе может подавляться.
Например, на основе изменения момента поворота вокруг вертикальной оси или изменения ускорения, которые вызываются для упомянутого транспортного средства MM посредством операции руления водителя, детектор 8D намерения смены может определять то, имеет или нет водитель намерение смены полосы движения. Изменение момента поворота вокруг вертикальной оси или изменение ускорения может определяться, например, посредством дифференциального значения перемещения по рысканию или дифференциального значения ускорения.
Посредством этого, режим работы упомянутого транспортного средства MM может определять намерение смены полосы движения.
(5) В противном случае, на основе перемещения упомянутого транспортного средства MM относительно полосы 200 дорожной разметки (полосы безопасности), детектор 8D намерения смены может определять то, имеет или нет водитель намерение смены полосы движения. Перемещение упомянутого транспортного средства MM относительно полосы 200 дорожной разметки определяется в зависимости, например, от показателя поперечной скорости, показателя угла φf поворота вокруг вертикальной оси и т.п.
Намерение смены полосы движения определяется посредством перемещения упомянутого транспортного средства MM относительно полосы 200 дорожной разметки. Как результат, когда водитель реализует смену полосы движения на основе полосы 200 дорожной разметки, которую водитель рассматривает как практическую полосу движения, и когда упомянутое транспортное средство MM обгоняет помеху SM, начало неудобного управления предотвращением подъезда к помехе может подавляться.
(6) В противном случае, на основе поперечной скорости упомянутого транспортного средства MM относительно помехи SM, детектор 8D намерения смены может определять то, имеет или нет водитель намерение смены полосы движения.
Намерение смены полосы движения определяется посредством перемещения упомянутого транспортного средства MM относительно помехи SM. Как результат, даже помеха SM, осуществляющая подъезд со смежной полосы движения, рассматривается в качестве цели управления предотвращением подъезда к помехе (сигнала тревоги), и между тем, даже когда смена полосы движения относительно вышеуказанной помехи выполняется, считается, что такая смена полосы движения реализована, тем самым реализуя управление предотвращением подъезда к помехе. В этом случае, когда упомянутое транспортное средство MM обогнало помеху SM, начало неудобного управления предотвращением подъезда к помехе может подавляться.
(7) Когда относительная скорость Relvsp является большой, пороговое значение KD1 определения относительного расстояния Dist, используемое для детектора 8C состояния обгона, чтобы определять то, что состояние обгона установлено, может быть меньше, чем тогда, когда относительная скорость Relvsp является небольшой.
Когда относительная скорость Relvsp больше, определение того, что упомянутое транспортное средство MM обогнало помеху SM, может быть выполнено в положении, в котором относительное расстояние Dist меньше. Как результат, когда водитель выполняет смену полосы движения посредством добавления относительной скорости Relvsp во въезде в поток и т.п., подавление управления в соответствии с ощущением водителя разрешается, тем самым позволяя подавлять начало неудобного управления.
(8) Пороговое значение KD1 определения относительного расстояния Dist, используемое для детектора 8C состояния обгона, чтобы определять то, что состояние обгона установлено, может быть меньшим, поскольку угол Angle определения помехи SM располагается в направлении в большей степени сзади упомянутого транспортного средства MM в отношении бокового направления упомянутого транспортного средства MM.
Когда угол Angle определения располагается в направлении в большей степени сзади, чем боковое направление упомянутого транспортного средства MM, например, когда помеха SM находится в таком положении, что она показывается в зеркале заднего вида упомянутого транспортного средства MM, может быть определено то, что состояние обгона установлено, даже если относительное расстояние Dist небольшое. Как результат, начало неудобного управления, которое не согласуется с ощущением водителя, может подавляться.
Второй вариант осуществления
Далее, второй вариант осуществления изложен со ссылкой на чертежи. В дальнейшем в этом документе, ссылки с номерами, идентичные ссылкам с номерами согласно первому варианту осуществления, добавляются к идентичным устройствам и т.п.
Согласно первому варианту осуществления, приводится пояснение относительно случая, когда начало управления подавляется посредством исключения управления.
В отличие от первого варианта осуществления, начало управления подавляется посредством изменения условий начала управления, чтобы тем самым затруднять переход к управлению согласно второму варианту осуществления.
В данном документе, как указано выше, чем выше (точнее) точность намерения смены полосы движения, тем меньше величина αL2 (αR2) точности определения смены полосы движения. Точность намерения смены полосы движения задается как точность намерения смены полосы движения водителем. Тем не менее, величина αL2 (αR2) точности определения смены полосы движения, умноженная на величину αL1 (αL1) точности определения обгона (например, αL2 ← αL2 × αL1), может быть использована в качестве полной точности намерения смены полосы движения.
Фиг.9 показывает блок-схему последовательности операций способа, показывающую процедуры обработки при управлении предотвращением, реализованные посредством модуля 8 управления тормозной/движущей силой согласно второму варианту осуществления.
Согласно второму варианту осуществления, как показано на фиг.9, добавление этапа S85, заменяющего этап S115, отличается от фиг.4. Другие структуры и обработки являются аналогичными структурам и обработкам согласно первому варианту осуществления.
<Этап S80>
На этапе S80, аналогично первому варианту осуществления, время Tt упреждающего отслеживания для определения порогового значения для оценки состояния, в котором водитель осуществляет подъезд к помехе SM впоследствии, задается.
<Этап S85>
Далее, на этапе S85, когда флаг F_Overtake, показывающий определение состояния обгона, равен "1", время Tt упреждающего отслеживания сбрасывается посредством следующих выражений. Время Tt упреждающего отслеживания тем самым сбрасывается до меньшего значения, и как результат, точка 150 упреждающего отслеживания становится меньшей. С другой стороны, когда флаг F_Overtake равен "0", процесс переходит к этапу S90.
Tt=Tt × αL2 (для помехи SM слева)
Tt=Tt × αR2 (для помехи SM справа)
Другие структуры и обработки являются аналогичными структурам и обработкам согласно первому варианту осуществления.
Работа
Когда водитель выполняет операцию руления и т.п. в сторону помехи SM после обгона помехи SM слева, как показано на фиг.7, определяется то, больше или равно расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания, ΔO или нет. Когда ΔXb больше или равно ΔO, определяется то, что начало управления установлено. Согласно второму варианту осуществления, поскольку время Tt упреждающего отслеживания сбрасывается таким образом, что оно меньше, начало управления подавляется. Т.е. по сравнению с тем, когда определяется то, что состояние отсутствия обгона установлено, управление начинается, когда упомянутое транспортное средство MM выполняет дополнительный подъезд к помехе SM, тем самым управление с меньшей вероятностью должно начинаться.
Таким образом, когда определяется то, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM сбоку, начало управления предотвращением подъезда к помехе подавляется, по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено. Когда упомянутое транспортное средство MM обгоняет помеху SM сбоку, следует понимать, что водитель распознает помеху SM сбоку. Следовательно, в таком случае, подавление начала управления предотвращением подъезда к помехе может уменьшать дискомфорт водителя, который обусловлен следующими операциями: управление предотвращением подъезда к помехе в достаточной степени реализуется, и тем самым упомянутое транспортное средство MM управляется таким образом, что оно отдаляется от помехи SM сбоку.
Кроме того, чем выше точность намерения смены полосы движения, тем больше величина подавления начала управления задается (т.е. тем меньше время Tt упреждающего отслеживания), тем самым позволяя реализовывать управление помощью при вождении посредством дополнительного уменьшения дискомфорта, вызываемого у водителя.
В данном документе, этапы S60, S85 включаются в операции, реализованные посредством модуля 8Da определения точности намерения смены. Время Tt упреждающего отслеживания является известным временем.
Эффект второго варианта осуществления
(1) Модуль 8Da определения точности намерения смены (этапы S60, S85) определяет точность намерения смены полосы движения, определяемую посредством детектора 8D намерения смены. Когда точность намерения смены полосы движения, определенная посредством модуля 8Da определения точности намерения смены (этапы S60, S85), является высокой, подавление начала посредством модуля 8Ba подавления управления задается более сильным, чем тогда, когда точность намерения смены полосы движения является низкой.
Чем более явное намерение смены полосы движения водителя, тем более сильным задается подавление начала управления. Посредством этой операции, например, когда водитель выполняет смену полосы движения в заторе, когда расстояния до транспортных средств спереди и сзади являются короткими, начало неудобного управления может подавляться, когда водитель преднамеренно выполняет смену полосы движения.
(2) Точность намерения смены полосы движения определяется на основе состояния указателя поворота.
Точность определения намерения смены полосы движения определяется посредством состояния указателя поворота, т.е. сигнала смены направления. Посредством этого, водитель явно показывает указатель поворота, чтобы тем самым позволять определять на ранней стадии то, что водитель имеет явное намерение обгона и выполнение смены полосы движения (точность намерения смены полосы движения является высокой). Как результат, начало неудобного управления может подавляться.
(3) Вышеуказанная точность намерения смены полосы движения определяется на основе угла δ поворота рулевого колеса или угловой скорости Dδ поворота рулевого колеса.
Точность определения намерения смены полосы движения определяется посредством информации поворота рулевого колеса. Посредством этой операции, когда водитель, при интенсивном движении, обгоняет помеху SM и выполняет смену полосы движения, начало неудобного управления может подавляться.
(4) Вышеуказанная точность намерения смены полосы движения определяется на основе состояния ускорения транспортного средства, которое получается из операции ускорения водителя и т.п.
Когда водитель выполняет обгон и смену полосы движения при ускорении упомянутого транспортного средства MM для въезда в поток и т.п., начало неудобного управления может подавляться.
(5) Контроллер 8B предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе на основе упрежденного положения упомянутого транспортного средства (расчетного положения ΔXb упомянутого транспортного средства), оцененного после известного времени (времени Tt упреждающего отслеживания). Модуль 8Ba подавления управления подавляет начало управления предотвращением подъезда к помехе посредством сокращения известного времени (времени Tt упреждающего отслеживания).
Сокращение известного времени (времени Tt упреждающего отслеживания) для оценки подъезда к помехе SM подавляет начало управления, приводя к подавлению начала необязательного управления, позволяя осуществлять управление, когда упомянутое транспортное средство MM приближается к помехе SM.
Третий вариант осуществления
Далее, третий вариант осуществления изложен со ссылкой на чертежи. В дальнейшем в этом документе, ссылки с номерами, идентичные ссылкам с номерами согласно первому и второму вариантам осуществления, добавляются к идентичным устройствам и т.п.
Согласно третьему варианту осуществления также, начало управления подавляется посредством изменения условий начала управления, чтобы тем самым затруднять переход к управлению.
Согласно второму варианту осуществления, на этапе S85, в течение времени, когда определяется то, что состояние обгона установлено, время Tt упреждающего отслеживания сбрасывается до меньшего значения. В отличие от этого, согласно третьему варианту осуществления, пороговое значение определения начала управления сбрасывается к стороне помехи SM, чтобы тем самым подавлять начало управления.
Т.е. пороговое значение определения начала управления сбрасывается таким образом, что пороговое значение начала управления задерживается в соответствии с точностью намерения смены полосы движения водителя. Этот сброс реализуется только тогда, когда флаг F_Overtake, показывающий определение состояния обгона, равен 1.
Фиг.10 является блок-схемой последовательности операций способа, показывающей процедуры обработки при управлении предотвращением, реализованные посредством модуля 8 управления тормозной/движущей силой согласно третьему варианту осуществления.
В обработках, показанных на фиг.10, добавление этапа S105, заменяющего этап S115 (удаленный), отличается от фиг.4.
Т.е. на этапе S105, когда флаг F_Overtake, показывающий определение состояния обгона, равен "1", пороговое значение определения для начала управления сбрасывается к стороне помехи SM. С другой стороны, когда флаг F_Overtake равен "0", процесс переходит к этапу S110.
Изложен сброс порогового значения определения для начала управления.
В данном документе, как указано на этапе S110 согласно первому варианту осуществления, когда условие 1 начала используется, т.е. "ΔXb ≥ ΔO (12)" в качестве условия начала, пороговым значением определения для начала управления является ΔO. Когда условие 2 начала используется, т.е. "ΔX2 = ΔX - ΔX0 ≥ X2obst (13)" в качестве условия начала, пороговым значением определения для начала управления является X2obst.
В отличие от этого, когда флаг F_Overtake равен "1", следующие обработки реализуются, чтобы тем самым сбрасывать пороговое значение определения.
Сначала, ΔXOcorrection (>1) вычисляется.
Это ΔXOcorrection задается таким образом, что чем меньше величина αL2 (αR2) точности определения смены полосы движения, тем больше ΔXOcorrection. В противном случае, ΔXOcorrection может быть постоянным.
Затем, пороговое значение определения для начала управления вычисляется на основе следующего выражения.
(Для условия 1 начала)
ΔO ← ΔO + ΔXOcorrection
(Для условия 2 начала)
X2obst ← X2obst + ΔXOcorrection
Другие структуры являются аналогичными структурам согласно первому и второму вариантам осуществления.
Работа
После того, как упомянутое транспортное средство MM обгоняет помеху SM слева, водитель реализует операцию руления и т.п. в сторону помехи SM (на фиг.8), затем, как показано на фиг.7, определяется то, больше или равно расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания для управления, ΔO или нет. Когда ΔXb больше или равно ΔO, определяется то, что начало управления установлено. В этом случае, согласно третьему варианту осуществления, ΔO задается большим, т.е. пороговое значение определения для начала управления сбрасывается к стороне помехи SM в направлении ширины полосы движения, тем самым подавляя начало управления. Т.е. по сравнению с тем, когда определяется то, что состояние отсутствия обгона установлено, управление начинается, когда упомянутое транспортное средство MM выполняет дополнительный подъезд к помехе SM, тем самым управление с меньшей вероятностью должно начинаться.
Таким образом, когда определяется то, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM сбоку, начало управления предотвращением подъезда к помехе подавляется, по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено. Когда упомянутое транспортное средство MM обгоняет помеху SM сбоку, следует понимать, что водитель распознает помеху SM сбоку. Следовательно, в таком случае, подавление начала управления предотвращением подъезда к помехе может уменьшать дискомфорт водителя, который обусловлен следующими операциями: управление предотвращением подъезда к помехе в достаточной степени реализуется, и тем самым упомянутое транспортное средство MM управляется таким образом, что оно отдаляется от помехи SM сбоку.
Кроме того, чем выше точность намерения смены полосы движения, тем больше величина подавления начала управления задается, тем самым позволяя реализовывать управление помощью при вождении посредством дополнительного уменьшения дискомфорта, вызываемого у водителя.
В данном документе, этап S105 включается в операции, реализованные посредством модуля 8Da определения точности намерения смены.
Эффект третьего варианта осуществления
(1) Контроллер 8B предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе на основе помехи SM или начального положения 60 управления, которое задается относительно полосы 200 дорожной разметки. Модуль 8Ba подавления управления подавляет начало управления предотвращением подъезда к помехе посредством изменения задания начального положения 60 управления на сторону помехи SM.
Пороговое значение начала управления, которое задано в отношении полосы 200 дорожной разметки, задается равным внутренней стороне (стороне помехи SM), чтобы тем самым подавлять начало управления. Посредством этой операции начало необязательного управления подавляется при предоставлении возможности осуществлять управление, когда упомянутое транспортное средство MM приближается к помехе SM.
Четвертый вариант осуществления
Далее, четвертый вариант осуществления изложен со ссылкой на чертежи. В дальнейшем в этом документе, ссылки с номерами, идентичные ссылкам с номерами согласно первому-третьему вариантам осуществления, добавляются к идентичным устройствам и т.п.
Согласно четвертому варианту осуществления также, начало управления подавляется посредством изменения условий начала управления, чтобы тем самым затруднять переход к управлению.
Согласно второму варианту осуществления, на этапе S85, в течение времени, когда определяется то, что состояние обгона установлено, время Tt упреждающего отслеживания сбрасывается до меньшего значения. В отличие от этого, согласно четвертому варианту осуществления, область K-AREA определения помех временно изменяется на меньшую, чтобы тем самым подавлять начало управления.
Блок-схема последовательности операций способа, показывающая процедуры обработки при управлении предотвращением, реализованные посредством модуля 8 управления тормозной/движущей силой согласно четвертому варианту осуществления, показывается на фиг.10, аналогично третьему варианту осуществления.
Тем не менее, обработка на этапе S105 согласно четвертому варианту осуществления отличается от обработки на этапе S105 согласно третьему варианту осуществления. Изложены такие различные обработки.
На этапе S105 согласно четвертому варианту осуществления, когда флаг F_Overtake, показывающий определение состояния обгона, равен 0, процесс переходит к этапу S110. Эта операция является аналогичной операции на этапе S105 согласно третьему варианту осуществления. С другой стороны, на этапе S105 согласно четвертому варианту осуществления, когда флаг F_Overtake, показывающий определение состояния обгона, равен 1, следующие обработки реализуются.
Т.е. область K-AREA определения помех для задания того, определять или нет помеху SM, изменяется посредством следующего выражения. Фиг.11 показывает пример состояния после такого изменения.
Продольный диапазон = Продольный диапазон × αL2 (αR2)
Поперечный диапазон = Поперечный диапазон × αL2 (αL2)
Граничное положение на стороне упомянутого транспортного средства MM (продольное положение и поперечное положение) в области K-AREA определения помех является фиксированным, чтобы тем самым изменять продольную ширину и поперечную ширину в диапазоне определения. Т.е. диапазон, указываемый посредством пунктирной линии на фиг.11, обозначает область K-AREA определения помех перед изменением, в то время как диапазон, указываемый посредством сплошной линии, обозначает область K-AREA определения помех после изменения.
Затем, на основе сигналов определения радарных устройств 24L/24R определяется то, присутствует или нет помеха SM в таким образом измененной области K-AREA определения помех. После определения того, что помеха SM присутствует в измененной области K-AREA определения помех, процесс переходит к этапу S110. С другой стороны, после определения того, что помеха SM не присутствует в измененной области K-AREA определения помех, процесс завершает обработки и возвращается.
Другие структуры являются аналогичными структурам согласно первому и второму вариантам осуществления.
Работа
После того, как упомянутое транспортное средство MM обгоняет помеху SM слева, водитель реализует операцию руления и т.п. в сторону помехи SM, затем, как показано на фиг.11, определяется то, больше или равно расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания для управления, ΔO или нет. Когда ΔXb больше или равно ΔO, определяется то, что начало управления установлено. В этом случае, согласно четвертому варианту осуществления, определяется то, присутствует или нет помеха SM в области K-AREA определения помех, которая корректируется до меньшего значения. Когда помеха SM не присутствует, управление не начинается. Т.е. по сравнению с тем, когда определяется то, что состояние отсутствия обгона установлено, управление начинается, когда упомянутое транспортное средство MM осуществляет дополнительный подъезд к помехе SM.
Таким образом, когда определяется то, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM сбоку, начало управления предотвращением подъезда к помехе подавляется, по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено. Когда упомянутое транспортное средство MM обгоняет помеху SM сбоку, следует понимать, что водитель распознает помеху SM сбоку. Следовательно, в таком случае, подавление начала управления предотвращением подъезда к помехе может уменьшать дискомфорт водителя, который обусловлен следующими операциями: управление предотвращением подъезда к помехе в достаточной степени реализуется, и тем самым упомянутое транспортное средство MM управляется таким образом, что оно отдаляется от помехи SM сбоку.
Кроме того, чем выше точность намерения смены полосы движения, тем больше вышеуказанная величина подавления начала управления задается, тем самым позволяя реализовывать управление помощью при вождении посредством дополнительного уменьшения дискомфорта, вызываемого у водителя.
В данном документе, этап S105 включается в операции, реализованные посредством модуля 8Da определения точности намерения смены.
Эффект четвертого варианта осуществления
(1) Модуль 8Ba подавления управления подавляет начало управления предотвращением подъезда к помехе посредством уменьшения области K-AREA определения помех.
Уменьшение области K-AREA определения помех для определения помехи SM в качестве цели управления подавляет начало управления предотвращением подъезда к помехе. Посредством этой операции управление может реализовываться, когда упомянутое транспортное средство MM приближается к помехе SM, при подавлении начала необязательного управления.
Модифицированный пример
(1) На этапе S105, область K-AREA определения помех для определения того, присутствует или нет помеха, изменена. Вместо этого, когда флаг F_Overtake=1, диапазон определения помех радарных устройств 24L/24R может быть изменен для реализации.
Пятый вариант осуществления
Далее, пятый вариант осуществления изложен со ссылкой на чертежи. В дальнейшем в этом документе, ссылки с номерами, идентичные ссылкам с номерами согласно первому-четвертому вариантам осуществления, добавляются к идентичным устройствам и т.п. Согласно первому-четвертому вариантам осуществления, управление подавляется посредством подавления определения начала управления предотвращением подъезда к помехе. Тем не менее, согласно пятому варианту осуществления, управление подавляется посредством подавления величины управления для управления предотвращением подъезда к помехе.
Структура
Часть 13 захвата изображений согласно пятому варианту осуществления определяет состояние въезда в поток в прямом и боковом направлении полосы движения упомянутого транспортного средства MM. В частности, на основе изображения датчика в прямом направлении упомянутого транспортного средства MM, часть 13 захвата изображений определяет расстояние Dist_lane от упомянутого транспортного средства MM до точки 300 въезда в поток.
Т.е. аналогично первому варианту осуществления, часть 13 захвата изображений согласно пятому варианту осуществления вычисляет угол φf поворота вокруг вертикальной оси, поперечное смещение Xf и кривизну β полосы движения и, на основе изображения в прямом направлении упомянутого транспортного средства MM, определяет то, что полоса движения, по которой упомянутое транспортное средство MM движется, объединяется со смежной полосой движения. При определении въезда в поток, часть 13 захвата изображений определяет расстояние Dist_lane от упомянутого транспортного средства MM до точки 300 въезда в поток, в которой полоса движения упомянутого транспортного средства MM объединяется со смежной полосой движения. В данном документе, определение, на основе изображения в прямом направлении упомянутого транспортного средства MM, того, что полоса движения упомянутого транспортного средства MM объединяется со смежной полосой движения, может быть выполнено из конфигурации полосы дорожной разметки (конфигурации разделительной линии) или знака точки въезда в поток, определяемого из изображения в прямом направлении упомянутого транспортного средства MM, и является текущим уровнем техники, следовательно, пояснение такого текущего уровня техники опускается. Помимо этого, согласно пятому варианту осуществления, из изображения (в прямом направлении упомянутого транспортного средства MM), снятого посредством части 13 захвата изображений, объединение (полосы движения упомянутого транспортного средства MM со смежной полосой движения) и расстояние Dist_lane до точки 300 въезда в поток определяется, но не только это. В противном случае, например, следующие операции разрешаются: определение точки 300 въезда в поток, например, из картографической информации навигационной системы и затем определение расстояния Dist_lane до точки 300 въезда в поток на основе таким образом определенной точки 300 въезда в поток и положения упомянутого транспортного средства MM, определяемого посредством GPS (глобальной системы определения местоположения).
Фиг.12 является блок-схемой последовательности операций способа для изложения обработок согласно пятому варианту осуществления. Блок-схема последовательности операций способа на фиг.12 опускает обработку этапа S115 в блок-схеме последовательности операций способа (см. фиг.4) согласно первому варианту осуществления при добавлении в нее этапа S125. Другие обработки являются аналогичными обработкам согласно первому варианту осуществления, следовательно, их пояснения опускаются в дальнейшем.
На этапе S125, модуль 8 управления тормозной/движущей силой вычисляет нижеописанное усиление K3recv (≤ 1) в соответствии с состоянием, в котором упомянутое транспортное средство MM обгоняет помеху SM сбоку. В данном документе, усиление K3recv становится меньшим по мере того, как определение того, что упомянутое транспортное средство MM обгоняет помеху SM сбоку, выполняется дополнительно (по мере того, как точность состояния обгона повышается).
В дальнейшем в этом документе, излагается способ вычисления усиления K3recv, реализованного на этапе S125. Фиг.13 является блок-схемой последовательности операций способа, показывающей процедуры обработки вычисления усиления K3recv, реализованного на этапе S125.
<Этап S1051>
Сначала, на этапе S1051, модуль 8 управления тормозной/движущей силой обнаруживает различные данные. Затем, процесс переходит к этапу S1052. На этапе S1051, аналогично этапу S10 на фиг.4, изложенному выше, модуль 8 управления тормозной/движущей силой обнаруживает скорость Vwi вращения каждого колеса (i = fl, fr, rl, rr), угол δ поворота рулевого колеса, открытие θt акселератора, давление Pm жидкости в главном цилиндре, которые определяются посредством каждого из датчиков, включающих в себя датчики 22FL, 22FR, 22LR, 22RR скорости вращения колес, датчик 19 угла поворота рулевого колеса, датчик 18 открытия акселератора и датчик 17 давления в главном цилиндре. Кроме того, модуль 8 управления тормозной/движущей силой обнаруживает i) сигнал смены направления переключателя 20 указателя поворота, ii) угол φf поворота вокруг вертикальной оси, поперечное смещение Xf, кривизну β полосы движения, которые определяются посредством части 13 захвата изображений, и iii) информацию помехи SM сбоку, определяемую посредством радарных устройств 24L/24R (детектора 50 помех сбоку). Кроме вышеуказанного, модуль 8 управления тормозной/движущей силой обнаруживает i) информацию помехи SM спереди и ii) состояние въезда в поток полосы движения упомянутого транспортного средства.
В данном документе, информация помехи SM спереди включает в себя расстояние Dist_pre между упомянутым транспортным средством MM и помехой SM спереди и относительную скорость Relvsp_pre между упомянутым транспортным средством MM и помехой SM, которые определяются посредством радарного устройства 23. Кроме того, состояние въезда в поток полосы движения упомянутого транспортного средства обозначается посредством расстояния Dist_lane от упомянутого транспортного средства MM до точки 300 въезда в поток в прямом направлении упомянутого транспортного средства MM.
<Этап S1052>
На этапе S1052, величина αL1 точности обгона вычисляется посредством обработок, аналогичных обработкам на этапе S55 в блок-схеме последовательности операций способа на фиг.4.
<Этап S1053>
Затем, на этапе S1053, аналогично этапу S55 на фиг.4, модуль 8 управления тормозной/движущей силой определяет то, меньше или нет величина αL1 точности обгона, вычисленная на этапе S1052, порогового значения определения обгона "D_αL1 (<1)".
<Этап S1054>
Затем, когда αL1 ≥ D_αL1, определяется то, что состояние обгона не установлено, и затем процесс переходит к этапу S1054. С усилением K3recv = 1, обработка вычисления левого усиления K3recv завершается.
<Этап S1055>
С другой стороны, когда αL1 < D_αL1 определяется на этапе S1053, определяется то, что состояние обгона установлено, и затем процесс переходит к этапу S1055. Затем, определяется то, истекло или нет известное время после того, как состояние обгона определено (т.е. после того, как αL1 ≥ D_αL1 изменено на αL1 < D_αL1).
Затем, когда известное время истекло, процесс переходит к вышеуказанному этапу S1054, в то время как, когда известное время не истекло, процесс переходит к этапу S1056.
<Этап S1056>
На этапе S1056, на основе операций водителя, обнаруживаемых на этапе S1051, модуль 8 управления тормозной/движущей силой вычисляет величину αL2 точности определения смены полосы движения влево посредством обработок, аналогичных обработкам на этапе S60 в вышеизложенной блок-схеме последовательности операций способа на фиг.4.
<Этап S1057>
Затем, на этапе S1057, на основе информации помехи SM спереди, обнаруживаемой на этапе S1051, модуль 8 управления тормозной/движущей силой вычисляет величину α3 определения подъезда к помехе SM спереди.
В качестве информации помехи SM спереди используется расстояние Dist_pre между упомянутым транспортным средством MM и помехой SM и относительная скорость Relvsp_pre между упомянутым транспортным средством MM и помехой SM спереди.
Сначала, на основе следующего выражения (26), время TTC достижения (время достижения помехи) для достижения посредством упомянутого транспортного средства MM помехи SM спереди вычисляется.
TTC = Dist_pre/Relvsp_pre (26)
Затем, величина α3 определения подъезда вычисляется таким образом, что, чем меньше таким образом вычисленное время TTC достижения помехи, тем меньше величина α3 определения подъезда к помехе SM спереди.
<Этап S1058>
Затем, на этапе S1058, модуль 8 управления тормозной/движущей силой вычисляет величину α4 определения состояния въезда в поток на основе состояния въезда в поток (в прямом и боковом направлении полосы движения упомянутого транспортного средства), обнаруживаемого на вышеприведенном этапе S1051.
Как показано на фиг.14, в качестве состояния въезда в поток в прямом и боковом направлении полосы движения упомянутого транспортного средства, расстояние Dist_lane от упомянутого транспортного средства MM до точки 300 въезда в поток используется.
Сначала, на основе расстояния Dist_lane до точки 300 въезда в поток, скорости V упомянутого транспортного средства и ускорения dV упомянутого транспортного средства вычисляется время Tg достижения (время достижения точки въезда в поток) для достижения посредством упомянутого транспортного средства MM точки 300 въезда в поток. Затем, величина α4 определения состояния въезда в поток вычисляется таким образом, что, чем меньше таким образом вычисленное время Tg достижения точки въезда в поток, тем меньше величина α4 определения состояния въезда в поток.
<Этап S1059>
Затем, на этапе S1059, модуль 8 управления тормозной/движущей силой вычисляет левое усиление K3recv на основе величины αL1 точности обгона, вычисленной на этапе S1052, величины αL2 точности определения смены полосы движения влево, вычисленной на этапе S1056, величины α3 определения подъезда, вычисленной на этапе S1057, и величины α4 определения состояния въезда в поток, вычисленной на этапе S1058.

Помимо этого, на этапе S125, правое усиление K3recv также вычисляется. Правое усиление K3recv вычисляется на основе следующего выражения (28).

На основе информации помехи справа относительно упомянутого транспортного средства MM, величина αR1 точности обгона справа вычисляется посредством процедуры, аналогичной процедуре величины αL1 точности обгона слева, изложенной выше.
На основе операции вождения водителя, величина αR2 точности определения смены полосы движения в направлении помехи справа вычисляется посредством процедуры, аналогичной процедуре величины αL2 точности определения смены полосы движения в направлении помехи слева. Кроме того, величина α3 определения подъезда к помехе SM спереди и величина α4 определения состояния въезда в поток используют общее значение на правой и левой стороне.
Таким образом, усиление K3recv вычисляется на этапе S125, и процесс переходит к этапу S130.
Затем, на этапе S130, модуль 8 управления тормозной/движущей силой задает целевой момент Ms поворота вокруг вертикальной оси.
Когда флаг Fout_obst определения управления предотвращением подъезда к помехе снят, целевой момент Ms поворота вокруг вертикальной оси задается равным 0, и затем процесс переходит к этапу S140.
С другой стороны, когда флаг Fout_obst определения управления предотвращением подъезда к помехе установлен, целевой момент Ms поворота вокруг вертикальной оси вычисляется посредством следующего выражения (29), и затем процесс переходит к этапу S140.

В данном документе, K1recv, K2recv, K1mon и K2mon являются усилениями, которые задаются способом, аналогичным способу вышеприведенного выражения (18).
Согласно выражению (29), по мере того, как постоянно вызываемая скорость поворота вокруг вертикальной оси становится больше посредством угла φf поворота вокруг вертикальной оси относительно полосы 200 дорожной разметки или посредством увеличенной операции руления водителем, целевой момент Ms поворота вокруг вертикальной оси становится больше.
Другие структуры являются аналогичными структурам согласно первому и второму вариантам осуществления.
Работа
Далее, операции пятого варианта осуществления изложены со ссылкой на фиг.15.
Теперь, как показано на фиг.15(a), предполагается, что упомянутое транспортное средство MM движется параллельно с помехой SM слева практически с идентичной скоростью. В этом случае, упомянутое транспортное средство MM не находится в состоянии обгона помехи SM сбоку, тем самым задавая величину αL1 точности обгона слева ≥ D_αL1 (этап S1053 на фиг.13). Таким образом, усиление, используемое для левого управления, становится равным K3recv = 1 (этап S1054).
Сначала, на основе угла φf поворота вокруг вертикальной оси, целевой угловой скорости φm поворота вокруг вертикальной оси, целевого углового ускорения φm' поворота вокруг вертикальной оси, которые обнаруживаются, когда упомянутое транспортное средство MM движется, расчетное положение ΔXb упомянутого транспортного средства (см. фиг.7) вычисляется как упрежденное положение упомянутого транспортного средства после времени Tt упреждающего отслеживания (этап S90). Затем, упомянутое транспортное средство MM перемещается в сторону помехи SM посредством операции руления водителя (α на фиг.15(a)), тем самым расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени упреждающего отслеживания (Tt·Kbuzz) для сигнала тревоги, становится превышающим или равным ΔO, чтобы тем самым выдавать сигнал тревоги водителю (этап S120). После этого, когда водитель не может реализовывать изменения пути и т.п. упомянутого транспортного средства MM, и расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания для управления, становится превышающим или равным ΔO, определяется то, что управление помощью при вождении для предотвращения помехи SM начато (этап S110).
После того, как определение того, что управление начинается, выполнено, целевой момент Ms поворота вокруг вертикальной оси вычисляется как величина управления на основе расчетного положения ΔXb упомянутого транспортного средства (этап S130). В этом случае, поскольку K3recv = 1, как указано выше, подавление показателя целевого момента Ms поворота вокруг вертикальной оси не реализуется.
Затем, тормозная/движущая сила (давление тормозной жидкости) управляется таким образом, чтобы принудительно задавать таким образом вычисленный целевой момент Ms поворота вокруг вертикальной оси (этап S140). Посредством этой операции упомянутое транспортное средство MM управляется в направлении предотвращения подъезда к помехе SM (β1 на фиг.15(a)).
Таким образом, когда водитель выполняет операцию руления в направлении подъезда к помехе SM сбоку без распознавания помехи SM сбоку, подъезд упомянутого транспортного средства MM к помехе SM сбоку может надлежащим образом не допускаться.
С другой стороны, как показано на фиг.15(b), предполагается, что упомянутое транспортное средство MM обогнало помеху SM сбоку со скоростью, превышающей скорость помехи SM сбоку, и затем водитель выполняет операцию руления в направлении подъезда к помехе SM сбоку. В этом случае, определяется то, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM сбоку, тем самым задавая величину αL1 точности обгона слева < D_αL1 (этап S1053). Следовательно, усиление для левого управления становится равным K3recv < 1 (этап S1059).
Когда водитель выполняет операцию руления в сторону помехи SM слева после обгона помехи SM слева (α на фиг.15(b)), расчетное положение ΔXb упомянутого транспортного средства, вычисленное посредством использования времени Tt упреждающего отслеживания для управления, становится превышающим или равным ΔO (см. фиг.7), тем самым определяется то, что управление помощью при вождении начато. Затем, на основе расчетного положения ΔXb упомянутого транспортного средства, целевой момент Ms поворота вокруг вертикальной оси вычисляется (этап S130). В этом случае, поскольку K3recv < 1, как указано выше, показатель целевого момента Ms поворота вокруг вертикальной оси (т.е. величина управления) вычисляется как меньший по сравнению с тем, когда упомянутое транспортное средство MM не находится в состоянии обгона на фиг.15(a), даже если расчетное положение ΔXb упомянутого транспортного средства является идентичным. Таким образом, управление предотвращением подъезда к помехе для предотвращения подъезда к помехе SM подавляется (β2 на фиг.15(b)).
Таким образом, когда определено, что упомянутое транспортное средство MM находится в состоянии обгона помехи SM сбоку, величина управления для управления предотвращением подъезда к помехе подавляется по сравнению с тем, когда состояние обгона не определяется. Когда упомянутое транспортное средство MM обгоняет помеху SM сбоку, следует понимать, что водитель распознает помеху SM сбоку. Следовательно, в таком случае, подавление величины управления для управления предотвращением подъезда к помехе может уменьшать дискомфорт водителя, который обусловлен следующими операциями: управление предотвращением подъезда к помехе в достаточной степени реализуется, и тем самым упомянутое транспортное средство MM управляется таким образом, что оно отдаляется от помехи SM сбоку.
Кроме того, чем выше точность состояния обгона (т.е. чем меньше величина αL1 точности обгона слева или величина αR1 точности обгона справа), тем больше величина подавления вышеуказанной величины управления задается, тем самым позволяя реализовывать управление помощью при вождении посредством дополнительного уменьшения дискомфорта, вызываемого у водителя.
Кроме того, чем выше точность намерения руления водителя (т.е. чем меньше величина αL2 точности определения смены полосы движения влево или величина αR2 точности определения смены полосы движения вправо) после того, как упомянутое транспортное средство MM обогнало помеху SM сбоку, тем больше величина подавления величины управления для управления предотвращением подъезда к помехе задается, тем самым позволяя водителю реализовывать операцию руления без дискомфорта.
Кроме того, в состоянии, в котором возможность намерения руления водителя является высокой после того, как упомянутое транспортное средство MM обгоняет помеху SM сбоку, т.е. в таких случаях, поскольку упомянутое транспортное средство MM осуществляет подъезд к помехе SM спереди, или точка 300 въезда в поток присутствует в прямом направлении полосы движения транспортного средства, величина управления для управления предотвращением подъезда к помехе в значительной степени подавляется. Вследствие этого, дискомфорт, вызываемый у водителя, может быть дополнительно уменьшен.
В данном документе, радарное устройство 23 включается в детектор помех спереди. Часть 13 захвата изображений включается в детектор точки въезда в поток. Этап 1053 на фиг.13 включается в операции, реализованные посредством детектора 8C состояния обгона, а этапы S1056-S1059 включаются в операции, реализованные посредством модуля 8Ba подавления управления. Кроме того, этап S1057 включается в операции, реализованные посредством модуля вычисления времени достижения помехи, и этап S1058 включается в операции, реализованные посредством модуля вычисления времени достижения точки въезда в поток.
Эффект пятого варианта осуществления
(1) Детектор 50 помех сбоку определяет помеху SM, присутствующую в области K-AREA определения помех, причем, по меньшей мере, направление позади и сбоку от упомянутого транспортного средства MM задается в качестве области K-AREA определения помех. Контроллер 8B предотвращения подъезда к помехе управляет упомянутым транспортным средством MM таким образом, чтобы не допускать подъезд упомянутого транспортного средства MM к помехе SM. Детектор 8C состояния обгона определяет, на основе информации помехи SM в отношении упомянутого транспортного средства MM, состояние обгона, которое является, по меньшей мере, одним из первого состояния, в котором упомянутое транспортное средство MM обгоняет помеху SM, и второго состояния, в котором оценивается то, что упомянутое транспортное средство MM должно обгонять помеху SM. Модуль 8Ba подавления управления, когда определение того, что состояние обгона установлено, выполнено на основе определения детектора 8C состояния обгона, подавляет величину управления посредством контроллера 8B предотвращения подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено.
Таким образом, когда состояние, в котором упомянутое транспортное средство MM обгоняет помеху SM сбоку, определяется, величина управления для управления для предотвращения подъезда к помехе SM сбоку подавляется по сравнению с тем, когда состояние, в котором упомянутое транспортное средство MM обгоняет помеху SM сбоку, не определяется. Таким образом, когда водитель реализует операцию руления в направлении подъезда к помехе SM сбоку при распознавании помехи SM сбоку, предотвращение подъезда упомянутого транспортного средства MM к помехе SM сбоку может подавляться.
Таким образом, в то время как операция управления, вызывающая дискомфорт у водителя, подавляется, подъезд к помехе SM упомянутого транспортного средства MM может надлежащим образом не допускаться.
(2) Детектор 8D намерения смены определяет намерение смены полосы движения водителя (операцию вождения водителя в направлении для подъезда к помехе SM сбоку). Когда детектор 8D намерения смены определяет, в течение известного времени, операцию вождения в направлении для подъезда к помехе SM сбоку после того, как детектор 8C состояния обгона определяет состояние обгона, модуль 8Ba подавления управления увеличивает величину подавления величины управления для управления предотвращением подъезда к помехе.
Таким образом, когда операция для подъезда в направлении помехи SM сбоку (намерение смены полосы движения в направлении помехи SM) определяется после того, как упомянутое транспортное средство MM обогнало помеху SM сбоку, величина подавления управления предотвращением подъезда к помехе корректируется так, что она является большой. Таким образом, дискомфорт водителя может быть эффективно уменьшен.
(3) Детектор помех спереди (радарное устройство 23) определяет помеху SM, присутствующую в прямом направлении упомянутого транспортного средства MM. Модуль вычисления времени достижения помехи (этап S1057) вычисляет время TTC достижения помехи для достижения посредством упомянутого транспортного средства MM помехи SM спереди, определяемой посредством детектора помех спереди (радарного устройства 23). Чем меньше время TTC достижения помехи, вычисленное посредством модуля вычисления времени достижения помехи (этап S1057), тем больше величина подавления величины управления для управления предотвращением подъезда к помехе задается посредством модуля 8Ba подавления управления.
Таким образом, в случае, когда операция для подъезда в направлении помехи SM сбоку оценивается после того, как упомянутое транспортное средство MM обогнало помеху SM сбоку, величина подавления управления предотвращением подъезда к помехе может быть скорректирована так, что она является большой. Таким образом, дискомфорт водителя может быть эффективно уменьшен.
(4) Детектор точки въезда в поток (часть 13 захвата изображений) определяет точку 300 въезда в поток в прямом и боковом направлении полосы движения упомянутого транспортного средства MM. Модуль вычисления времени достижения точки въезда в поток (S1058) вычисляет время Tg достижения точки въезда в поток для достижения посредством упомянутого транспортного средства MM точки 300 въезда в поток, определяемой посредством детектора точки въезда в поток (части 13 захвата изображений). Чем меньше время Tg достижения точки въезда в поток, вычисленное посредством модуля вычисления времени достижения точки въезда в поток (S1058), тем больше величина подавления величины управления для управления предотвращением подъезда к помехе задается посредством модуля 8Ba подавления управления.
Таким образом, в случае, когда операция для подъезда в направлении помехи SM сбоку оценивается после того, как упомянутое транспортное средство MM обогнало помеху SM сбоку, величина подавления управления предотвращением подъезда к помехе может быть скорректирована так, что она является большой. Таким образом, дискомфорт водителя может быть эффективно уменьшен.
(5) Когда помеха SM сбоку в боковом направлении упомянутого транспортного средства MM определяется, управление предотвращением подъезда к помехе для помощи в операции водителя так, что не допускается подъезд упомянутого транспортного средства MM к помехе SM сбоку, реализуется. В этом случае, когда состояние обгона, в котором упомянутое транспортное средство MM обгоняет помеху SM сбоку, определяется на основе информации помехи SM сбоку в отношении, по меньшей мере, упомянутого транспортного средства MM, величина управления для управления предотвращением подъезда к помехе подавляется по сравнению с тем, когда состояние обгона не определяется.
Таким образом, в то время как операция неудобного управления, которая может ощущаться водителем, когда водитель выполняет операцию руления при распознавании помехи SM сбоку, подъезд к помехе SM упомянутого транспортного средства MM может надлежащим образом не допускаться.
МОДИФИЦИРОВАННЫЙ ПРИМЕР
(1) Согласно пятому варианту осуществления, на этапе S1053 на фиг.13, пояснение приводится в таком случае, что, когда состояние обгона упомянутого транспортного средства MM определяется, величина управления для управления предотвращением подъезда к помехе подавляется. В противном случае, после того, как состояние обгона упомянутого транспортного средства MM определяется, подавление величины управления для управления предотвращением подъезда к помехе может продолжаться в течение известного времени. Кроме того, в течение известного времени, величина управления для управления предотвращением подъезда к помехе может подавляться до тех пор, пока упомянутое транспортное средство MM не выполняет движение на известное расстояние (т.е. до тех пор, пока время, необходимое для движения на известное расстояние, не истекает).
Кроме того, после того, как состояние обгона упомянутого транспортного средства MM определено в течение известного времени, величина управления для управления предотвращением подъезда к помехе может подавляться до тех пор, пока относительное расстояние Dist между упомянутым транспортным средством MM и помехой SM сбоку не становится известным расстоянием (до тех пор, пока время, необходимое для относительного расстояния Dist, чтобы становиться известным расстоянием, не истекает).
(2) Согласно пятому варианту осуществления, приводится пояснение такого случая, когда величина подавления величины управления для управления предотвращением подъезда к помехе задается согласно результатам определения/оценки (руления для подъезда к помехе SM сбоку), которые получаются после того, как состояние обгона упомянутого транспортного средства MM определено. Тем не менее, вышеуказанная величина подавления может задаваться, по меньшей мере, согласно результату определения состояния обгона упомянутого транспортного средства MM. Т.е. в обработках на фиг.13, следующие уравнения разрешаются: αL2 (αR2) = 1, α3 = 1 и α4 = 1. В этом случае, когда состояние обгона упомянутого транспортного средства MM просто определяется, величина управления для управления предотвращением подъезда к помехе подавляется согласно точности состояния обгона. Посредством этой операции простая структура позволяет подавлять операции управления, имеющие дискомфорт, который может вызываться, когда водитель выполняет операцию руления при распознавании помехи SM сбоку.
(3) Согласно пятому варианту осуществления, приводится пояснение такого случая, когда величина подавления величины управления для управления предотвращением подъезда к помехе задается, когда состояние обгона упомянутого транспортного средства MM определяется (когда положительное определение выполняется на этапе S1053 на фиг.13). Тем не менее, величина подавления величины управления для управления предотвращением подъезда к помехе может задаваться только тогда, когда состояние обгона упомянутого транспортного средства MM определяется, и водитель упомянутого транспортного средства MM имеет намерение руления. Т.е. следующие операции разрешаются: когда состояние обгона упомянутого транспортного средства MM определяется, определяется то, меньше или равна величина αL2 (αR2) точности определения смены полосы движения известному пороговому значению или нет, и когда величина αL2 (αR2) точности определения смены полосы движения меньше или равна известному пороговому значению, определяется то, что водитель имеет намерение смены полосы движения, чтобы тем самым задавать величину подавления величины управления для управления предотвращением подъезда к помехе.
(4) Кроме того, способ определения того, что водитель имеет намерение смены полосы движения, не ограничен вышеуказанным способом выполнения определения на основе величины αL2 (αR2) точности определения смены полосы движения. В противном случае, например, как указано согласно первому варианту осуществления, режим работы транспортного средства, перемещение упомянутого транспортного средства MM относительно полосы 200 дорожной разметки (разделительной линии), поперечная скорость упомянутого транспортного средства MM относительно помехи SM и т.п. может использоваться для определения.
Помимо этого, согласно первому-четвертому вариантам осуществления, подавление определения начала управления, когда упомянутое транспортное средство MM обгоняет другое транспортное средство SM, подавляет управление предотвращением подъезда к помехе, и согласно пятому варианту осуществления, подавление величины управления (целевого момента Ms поворота вокруг вертикальной оси), когда упомянутое транспортное средство MM обгоняет другое транспортное средство SM, подавляет управление предотвращением подъезда к помехе. Настоящее изобретение, тем не менее, не ограничено вышеуказанным. Т.е. когда упомянутое транспортное средство MM обгоняет другое транспортное средство SM, как подавление определения начала управления, так и подавление величины управления разрешаются.
В этом случае, степень свободы для реализации подавления управления повышается.
Все содержимое базовой заявки на патент Японии № 2009-167049 (поданной 15 июля 2009 года в Японии), заявки на патент Японии № 2009-292704 (поданной 24 декабря 2009 года в Японии) и заявки на патент Японии № 2010-135077 (поданной 14 июня 2010 года в Японии) содержится в данном документе по ссылке, чтобы защитить настоящую заявку от ошибочных переводов или пропущенных частей.
Как указано выше, содержимое настоящего изобретения изложено согласно первому-пятому вариантам осуществления, а также их модифицированным примерам. Настоящее изобретение, тем не менее, не ограничено вышеприведенными описаниями. Специалистам в данной области техники должно быть очевидным, что возможны различные его модификации и усовершенствования.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Когда упомянутое транспортное средство водителя осуществляет подъезд к помехе, чтобы тем самым удовлетворять условию начала управления предотвращением подъезда к помехе, в случае если может быть определено то, что упомянутое транспортное средство водителя находится в состоянии обгона помехи или в состоянии, в котором оценивается то, что оно должно обгонять помеху, предполагается, что водитель имеет намерение выполнения смены полосы движения в сторону помехи при распознавании присутствия помехи. В соответствии с настоящим изобретением, в таком случае, управление предотвращением подъезда к помехе подавляется, как результат, позволяя подавлять дискомфорт водителя. Т.е. при уменьшении дискомфорта, вызываемого у водителя, настоящее изобретение может надлежащим образом реализовывать управление помощью при вождении относительно помехи, расположенной в направлении позади и сбоку от упомянутого транспортного средства.




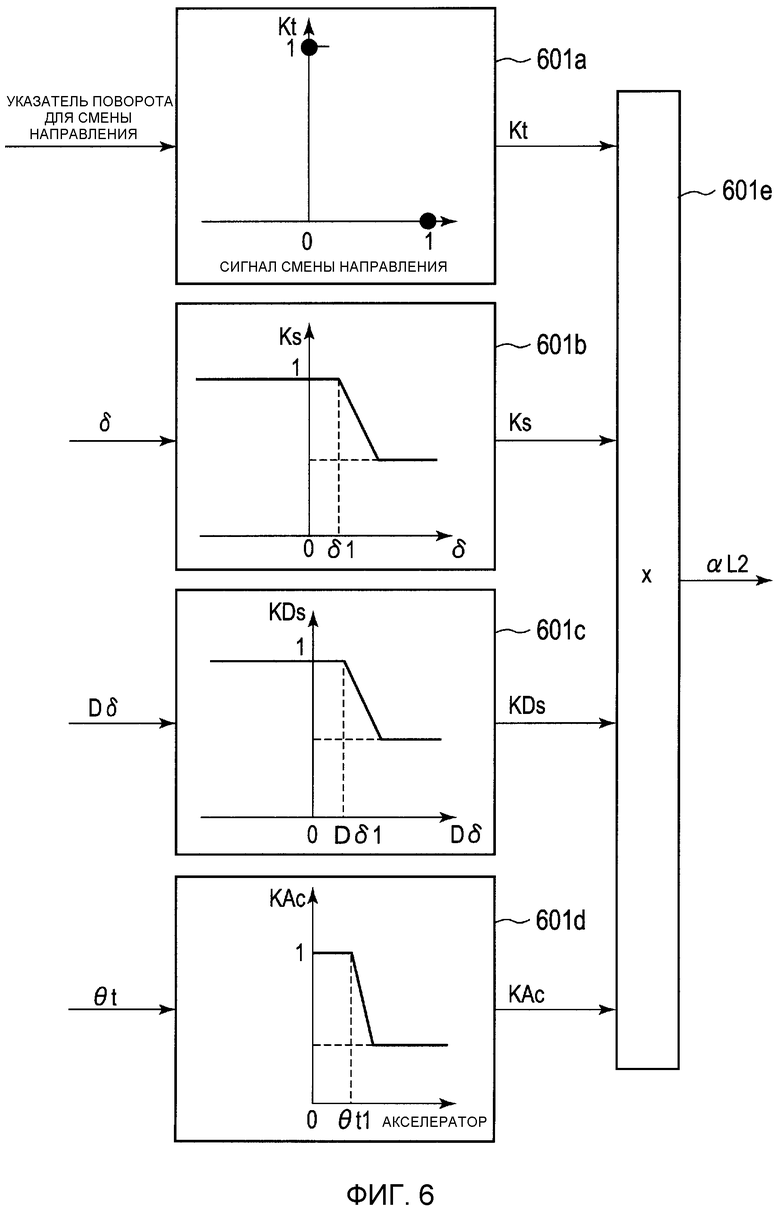
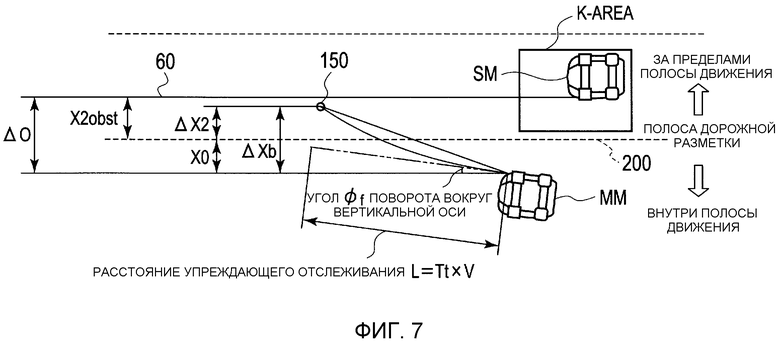
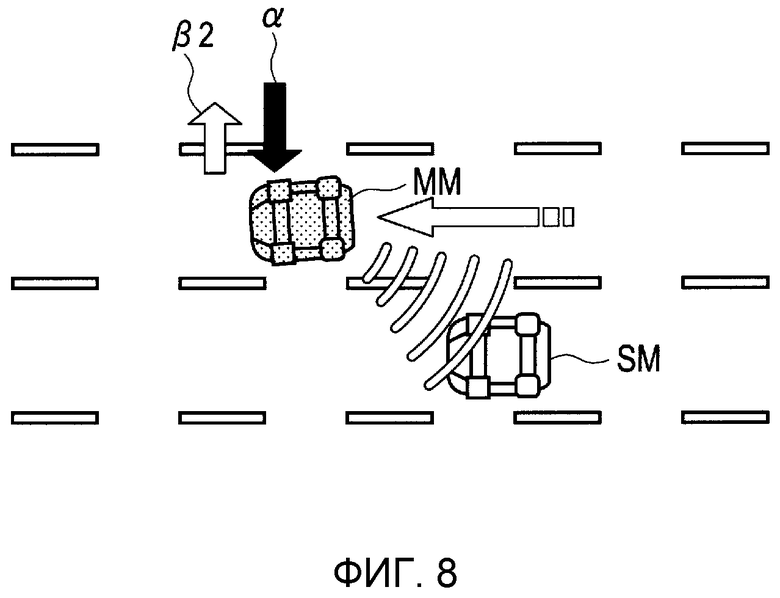



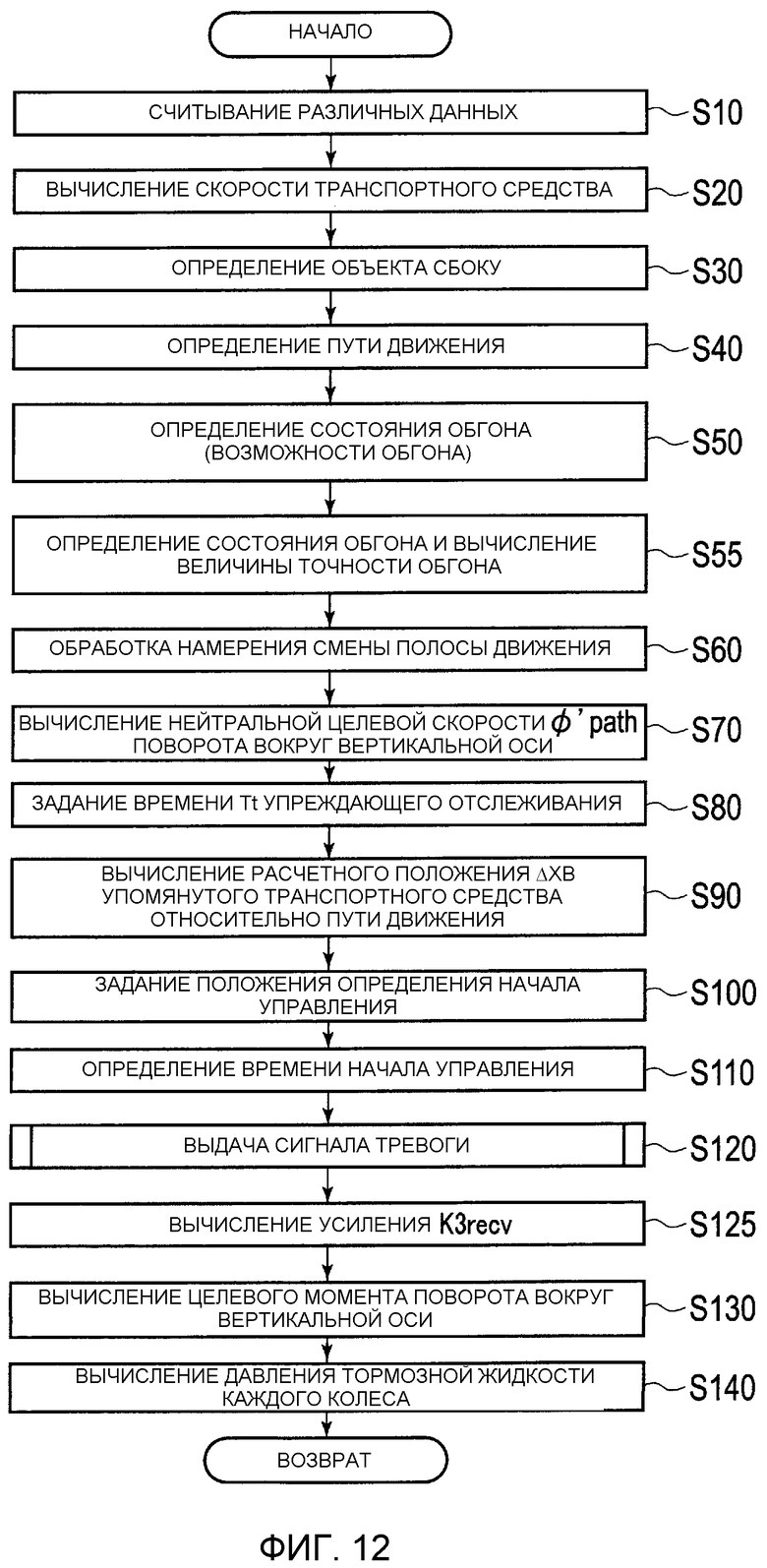


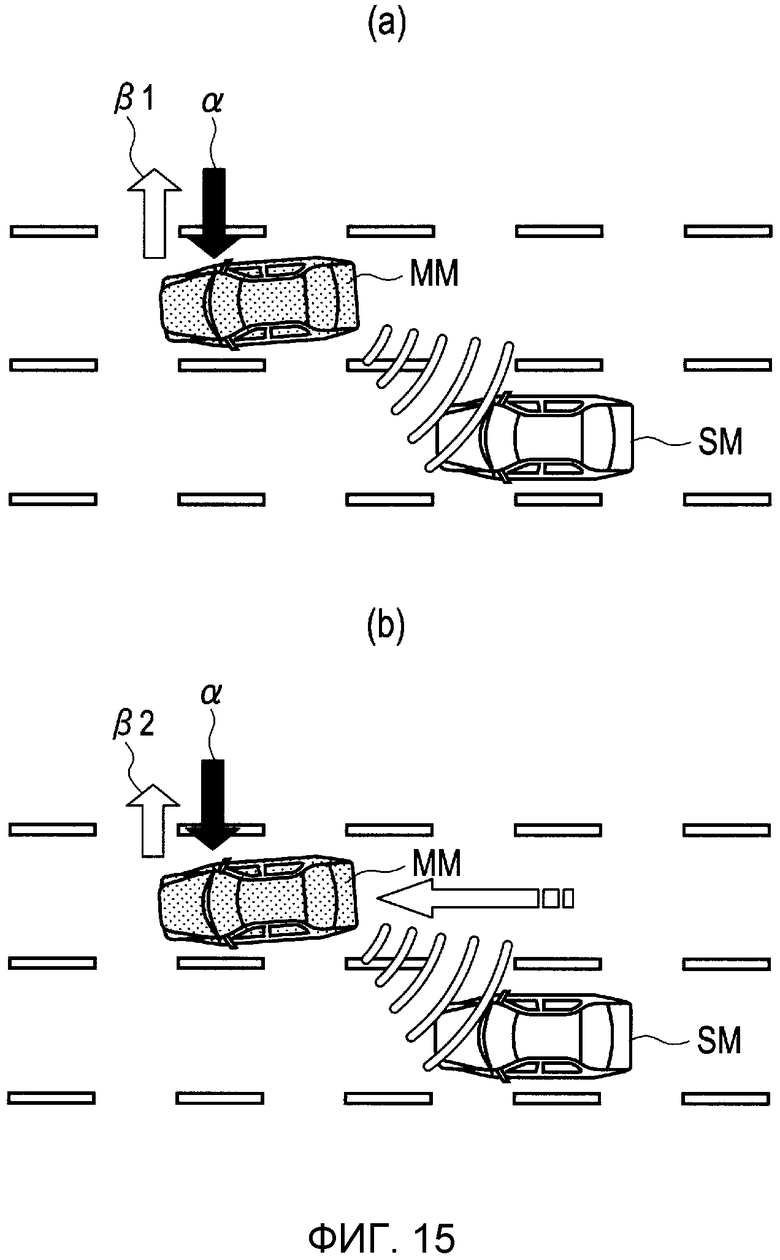
Изобретение относится к области помощи водителю при вождении транспортного средства. Помощник при вождении транспортного средства содержит детектор помех сбоку, контроллер предотвращения подъезда к помехе, детектор состояния обгона, модуль подавления управления и модуль оценки упрежденного положения. При этом контроллер предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе на основе упрежденного положения, оцененного модулем оценки упрежденного положения. Контроллер предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе на основе упрежденного положения, оцененного посредством модуля оценки упрежденного положения. Когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, модуль подавления управления подавляет начало управления предотвращением подъезда к помехе посредством контроллера предотвращения подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено, чтобы тем самым подавлять управление предотвращением подъезда к помехе. 13 з.п. ф-лы, 15 ил.
1. Помощник при вождении транспортного средства, содержащий:
- детектор помех сбоку для определения помехи, присутствующей в области определения помех, с, по меньшей мере, направлением позади и сбоку от упомянутого транспортного средства в качестве области определения помех;
- контроллер предотвращения подъезда к помехе для реализации управления предотвращением подъезда к помехе, которое помогает предотвращению подъезда для предотвращения подъезда упомянутого транспортного средства к помехе, определенной посредством детектора помех сбоку;
- детектор состояния обгона для определения состояния обгона, которое является, по меньшей мере, одним из первого состояния, в котором упомянутое транспортное средство обгоняет помеху, определяемую посредством детектора помех сбоку, и второго состояния, в котором оценивается то, что упомянутое транспортное средство должно обгонять помеху;
- модуль подавления управления, когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, для подавления управления предотвращением подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено; и
- модуль оценки упрежденного положения для оценки упрежденного положения, которое является положением упомянутого транспортного средства после известного времени,
- при этом:
- контроллер предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе на основе упрежденного положения, оцененного посредством модуля оценки упрежденного положения, и
- когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, модуль подавления управления подавляет начало управления предотвращением подъезда к помехе посредством контроллера предотвращения подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено, чтобы тем самым подавлять управление предотвращением подъезда к помехе.
2. Помощник при вождении транспортного средства по п.1, в котором модуль подавления управления подавляет начало управления предотвращением подъезда к помехе посредством уменьшения области определения помех.
3. Помощник при вождении транспортного средства по п.1, в котором:
- контроллер предотвращения подъезда к помехе определяет, что начало управления предотвращением подъезда к помехе установлено, когда упрежденное положение упомянутого транспортного средства после известного времени, оцененного посредством модуля оценки упрежденного положения, находится за пределами помехи или за пределами начального положения управления в направлении ширины полосы движения, при этом начальное положение управления задается на известном расстоянии от разделительной линии, и
- когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, модуль подавления управления изменяет начальное положение управления на сторону помехи, чтобы тем самым подавлять начало управления предотвращением подъезда к помехе.
4. Помощник при вождении транспортного средства по п.1, в котором модуль подавления управления подавляет начало управления предотвращением подъезда к помехе посредством сокращения известного времени, используемого посредством модуля оценки упрежденного положения, чтобы оценивать упрежденное положение.
5. Помощник при вождении транспортного средства по п.1, в котором:
- контроллер предотвращения подъезда к помехе управляет упомянутым транспортным средством таким образом, чтобы не допускать подъезд упомянутого транспортного средства к помехе,
- когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, модуль подавления управления подавляет величину управления посредством контроллера предотвращения подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено, чтобы тем самым подавлять управление предотвращением подъезда к помехе,
- помощник при вождении транспортного средства дополнительно содержит:
- детектор помех спереди для определения помехи, присутствующей в прямом направлении упомянутого транспортного средства, и
- модуль вычисления времени достижения помехи для вычисления времени достижения помехи для достижения посредством упомянутого транспортного средства помехи спереди, определяемой посредством детектора помех спереди,
- когда время достижения помехи, вычисленное посредством модуля вычисления времени достижения помехи, меньше, модуль подавления управления задает большей величину подавления величины управления для управления предотвращением подъезда к помехе, и
- упрежденное положение является точкой упреждающего отслеживания, которая является упрежденным положением упомянутого транспортного средства после времени упреждающего отслеживания, и время достижения помехи является временем для достижения точки упреждающего отслеживания.
6. Помощник при вождении транспортного средства по п.1, в котором:
- контроллер предотвращения подъезда к помехе управляет упомянутым транспортным средством таким образом, чтобы не допускать подъезд упомянутого транспортного средства к помехе,
- когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, модуль подавления управления подавляет величину управления посредством контроллера предотвращения подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено, чтобы тем самым подавлять управление предотвращением подъезда к помехе,
- помощник при вождении транспортного средства дополнительно содержит:
- детектор точки въезда в поток для определения точки въезда в поток в прямом направлении полосы движения упомянутого транспортного средства и
- модуль вычисления времени достижения точки въезда в ноток для вычисления времени достижения точки въезда в поток для достижения посредством упомянутого транспортного средства точки въезда в поток, определяемой посредством детектора точки въезда в поток, и
- когда время достижения точки въезда в поток, вычисленное посредством модуля вычисления времени достижения точки въезда в поток, меньше, модуль подавления управления задаст большей величину подавления величины управления для управления предотвращением подъезда к помехе, и
- упрежденное положение является точкой въезда в поток в прямом направлении.
7. Помощник при вождении транспортного средства по п.1, дополнительно содержащий:
- модуль оценки упрежденного положения для оценки упрежденного положения, которое является положением упомянутого транспортного средства после известного времени,
- при этом:
- контроллер предотвращения подъезда к помехе определяет начало управления предотвращением подъезда к помехе на основе упрежденного положения упомянутого транспортного средства после известного времени, оцененного посредством модуля оценки упрежденного положения, и
- когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона, модуль подавления управления подавляет начало управления предотвращением подъезда к помехе посредством контроллера предотвращения подъезда к помехе и также подавляет величину управления посредством контроллера предотвращения подъезда к помехе по сравнению с тем, когда определение того, что состояние обгона установлено, не выполнено, чтобы тем самым подавлять управление предотвращением подъезда к помехе.
8. Помощник при вождении транспортного средства по п.1, дополнительно содержащий:
- детектор намерения смены для определения того, имеет или нет водитель намерение смены полосы движения,
- причем, когда определение того, что состояние обгона установлено, выполнено на основе определения посредством детектора состояния обгона и намерение смены полосы движения определяется посредством детектора намерения смены, модуль подавления управления подавляет управление предотвращением подъезда к помехе.
9. Помощник при вождении транспортного средства по п.8, в котором, на основе изменения момента поворота вокруг вертикальной оси или изменения ускорения, которые вызываются для упомянутого транспортного средства, детектор намерения смены определяет, присутствует или нет намерение смены полосы движения.
10. Помощник при вождении транспортного средства по п.8, в котором, на основе перемещения упомянутого транспортного средства относительно разделительной линии, детектор намерения смены определяет, присутствует или нет намерение смены полосы движения.
11. Помощник при вождении транспортного средства по п.8, в котором, на основе относительной скорости в поперечном направлении упомянутого транспортного средства относительно помехи, детектор намерения смены определяет, присутствует или нет намерение смены полосы движения.
12. Помощник при вождении транспортного средства по п.1, дополнительно содержащий:
- модуль определения точности намерения смены для определения точности намерения смены полосы движения водителя,
- причем, когда точность намерения смены полосы движения, определенная посредством модуля определения точности намерения смены, является высокой, подавление посредством модуля подавления управления задается более сильным, чем тогда, когда точность намерения смены полосы движения является низкой.
13. Помощник при вождении транспортного средства по п.12, в котором точность намерения смены полосы движения определяется, по меньшей мере, одним из состояния указателя поворота, угла поворота рулевого колеса, угловой скорости поворота рулевого колеса и операции ускорения водителя.
14. Помощник при вождении транспортного средства по п.1, в котором управление предотвращением подъезда к помехе посредством контроллера предотвращения подъезда к помехе реализует, по меньшей мере, одну обработку принудительного задания для упомянутого транспортного средства момента поворота вокруг вертикальной оси в направлении от помехи и выдачи сигнала тревоги водителю о том, что упомянутое транспортное средство осуществляет подъезд к помехе.
| JP 9249149 А, 22.09.1997 | |||
| JP 2003276543 A, 02.10.2003 | |||
| JP 9188206 A, 22.07.1997 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |

