Изобретение относится к акустическим пеленгаторам (АП), базным пунктам автоматизированных звукометрических комплексов (АЗК), акустическим локаторам (АЛ) и может быть использовано для определения пеленга источника звука (ИЗ), (угла между известным направлением и направлением на ИЗ) и топографических координат этого ИЗ. Известным направлением может быть директриса акустической базы (перпендикуляр, восстановленный из средины акустической базы, а пеленг ИЗ определяется «способом разности времен» [1…7]. Под акустической базой понимается расстояние между двумя звукоприемниками (ЗП). Но этот способ не обеспечивает определение пеленга ИЗ при большом числе акустических сигналов, поступающих от разных ИЗ к АП или АЛ одновременно.
Более совершенным способом измерения пеленга ИЗ по сравнению с рассмотренным выше является способы, описанные в [8…12], но все они имеют недостатки, главный из которых недостаточные точность определения пеленга ИЗ и помехозащищенность.
В патентах РФ [13-15] используется равносигнальный способ измерения пеленга ИЗ, когда пеленг вычисляется по отношению постоянного напряжения на выходе 1 канала обработки сигнала (КОС), к напряжению на выходе 2 КОС. Назовем его классическим. Он обеспечивает достаточно высокую точность определения пеленга, за счет оптимального выбора параметров основных устройств АП, и помехозащищенность, когда обе линейные группы (ЛГ) ЗП, акустическая антенна, развернуты на горизонтальной поверхности Земли. В патенте РФ [16] и монографии [17] приведен равносигнальный способ измерения пеленга ИЗ с суммарно-разностной обработкой сигнала, когда пеленг вычисляется по отношению разности постоянных напряжений на выходах 1 и 2 КОС, к их сумме и затем по специальной формуле вычисляется наиболее точно пеленг ИЗ, но также, когда обе ЛГ ЗП развернуты на горизонтальной поверхности Земли. При наклонной же поверхности Земли возникают систематические ошибки в пеленге ИЗ и увеличиваются случайные ошибки его определения.
Наиболее близким техническим решением и более точным является способ определения пеленга ИЗ, приведенный в [16], который возьмем в качестве прототипа.
Технической задачей изобретения является снижение систематических и случайных ошибок пеленгования ИЗ при размещении акустических антенн на наклонных площадках поверхности Земли к плоскости горизонта.
Эта задача в изобретении решается следующим образом.
Измеряют температуру воздуха tB, скорость ветра W, дирекционный угол его направления αW в приземном слое атмосферы и вводят их в электронную вычислительную машину (ЭВМ).
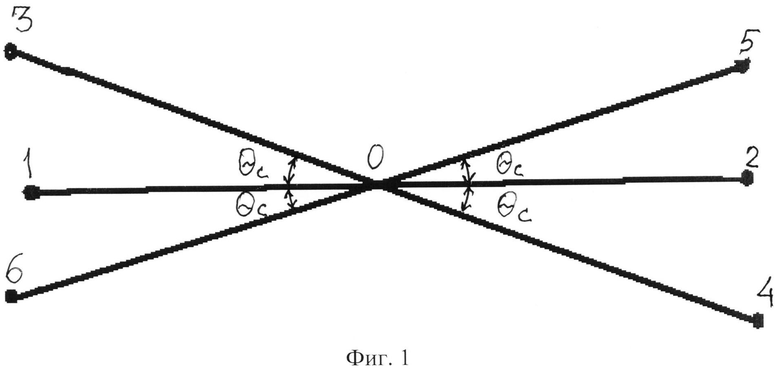
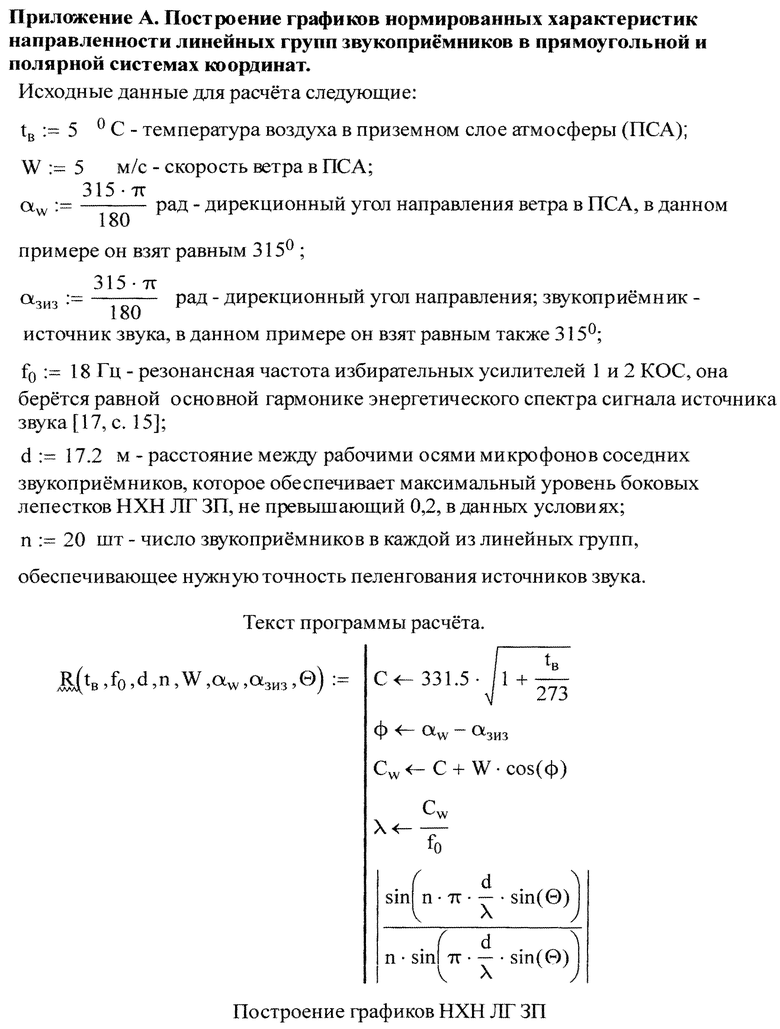
Намечают по топографической карте район особого внимания (РОВ), где могут размещаться огневые позиции артиллерии и минометов, которые обычно находятся на удалении 2-10 км от линии боевого соприкосновения войск, выбирают на местности ровную площадку примерно прямоугольной формы длиной не менее четырехсот метров и шириной - десяти метров, большие стороны которой были бы примерно перпендикулярны направлению на примерный центр РОВ, приблизительно на средине ширины в начале этой площадки намечают точку (присвоим этой точке №1), см. фиг.1, где устанавливают оптико-механический прибор (ОМП), например, перископическую артиллерийскую буссоль ПАБ-2АМ [18], и готовят его к работе в соответствии с требованиями инструкции по ее эксплуатации, поворачивают оптическую ось этого прибора по направлению вращения часовой стрелки в сторону какого-либо ориентира (при отсутствии ориентира устанавливают на удалении 100-150 м от ОМП веху), направление на который совпадает с направлением на примерный центр РОВ, определяют этим прибором дирекционный угол направления с этой точки на примерный центр РОВ (αзиз и вводят его в ЭВМ, с ее помощью рассчитывают скорость звука с учетом влияния ветра по формуле [16, с.10]
 .
.
По этой рассчитанной скорости звука и известным резонансной частоте избирательных усилителей (ИУ) 1 и 2 КОС акустического локатора f0 и числу ЗП в каждой ЛГ n, которые также вводятся в ЭВМ, варьируя расстояниями между рабочими осями микрофонов соседних ЗП d и добиваясь, чтобы уровни боковых лепестков характеристики направленности практически не превышали 0,3 при максимально узкой ширине ее на уровне 0,5, с помощью ЭВМ строят графики нормированных характеристик направленности (НХН) ЛГ ЗП, используя следующую формулу [16, с.4]:
 ,
,
где λ0=CW/f0,
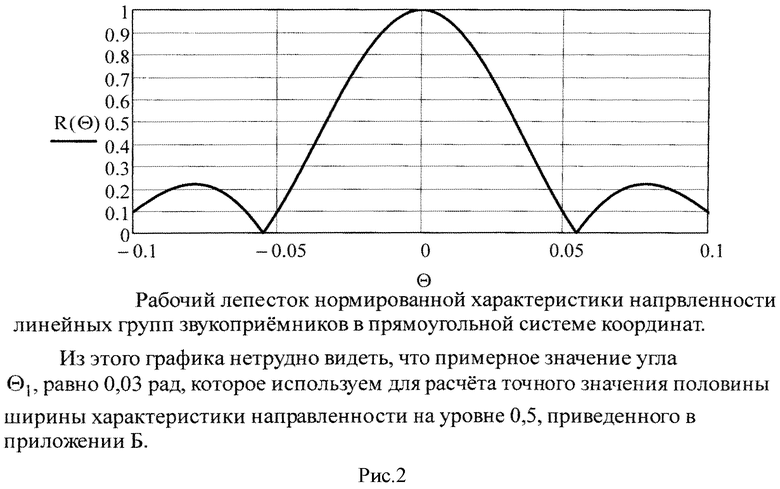
находят по графикам, построенным в прямоугольной системе координат, оптимальную характеристику направленности ЛГ ЗП (когда ширина НХН на уровне 0,5 Θ0,5 и уровень ее боковых лепестков не превышают 0,3), определяют по ней примерное положительное значение половины ее ширины на уровне 0,5 Θ1.
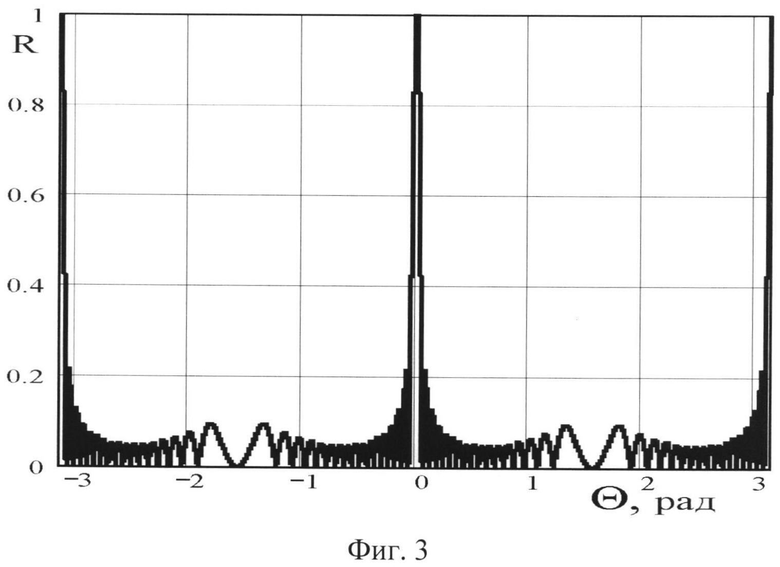
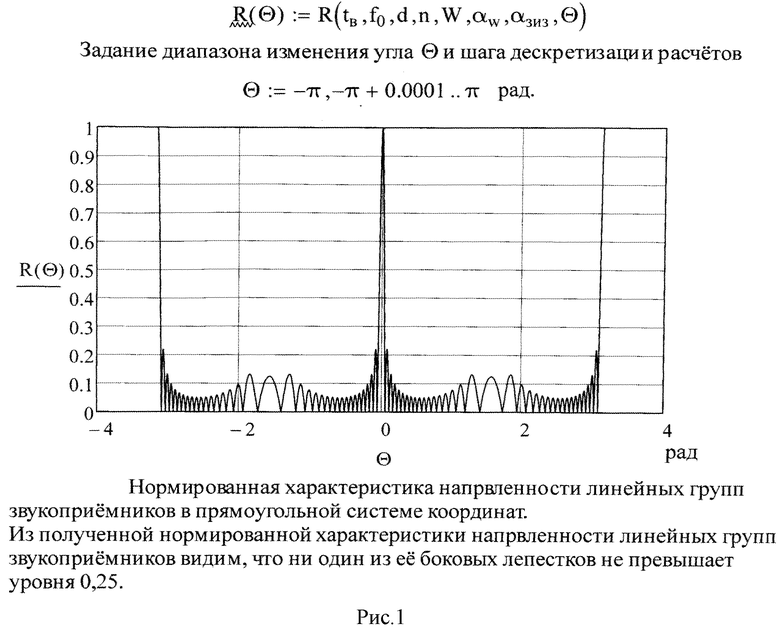
Расчет НХН в среде Mathcad, версия 15.0, с примером построения графиков ее в прямоугольной системе координат приведен в приложении A. В данном примере расстояние d равно 17,2 м, а ширина рабочего лепестка характеристики направленности ЛГ ЗП на уровне 0,5 составляет примерно 0,06 рад. На ЭВМ рассчитывают требуемую длину ЛГ ЗП (диагональ прямоугольника) при их развертывании на местности по формуле
L=d(n-1),
что очевидно.
Поворачивают оптическую ось ОМП по направлению вращения часовой стрелки на угол 90 градусов, относят дальномерную рейку, входящую в комплект буссоли, на расстояние вдоль оптической оси этого прибора, на рассчитанное расстояние L, устанавливают в эту точку веху №2, присвоив этой точке №2, см. фиг.1, убирают с точки №1 ОМП, устанавливают вертикально (используя шаровой уровень, установленный в верхней части этой вехи) в эту точку известной высоты веху №1, переносят ОМП к точке №2, убирают веху №2 с точки №2 и устанавливают над ней ОМП, готовят его к работе, установив высоту расположения его оптической оси, равной высоте вехи, установленной в точке №1, поворачивают оптическую ось ОМП по направлению вращения часовой стрелки до совмещения ее с вехой №1, перемещая оптическую ось ОМП в вертикальной плоскости к верхнему концу вехи номер один, измеряют угол наклона поверхности Земли к плоскости горизонта αн и вводят его в ЭВМ.
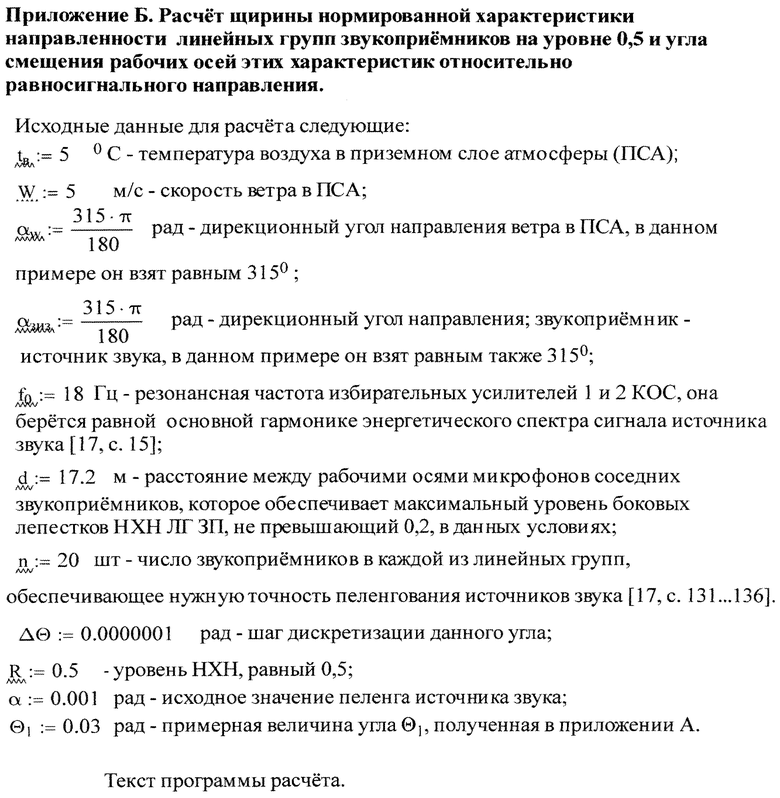
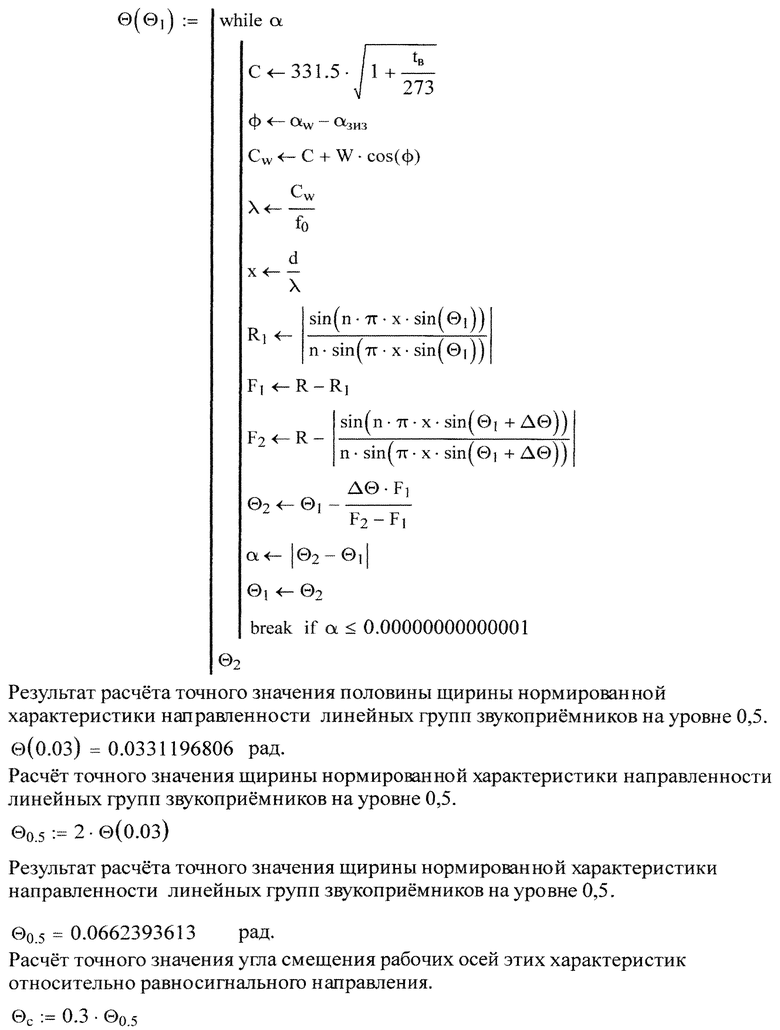
Далее рассчитывают ширину НХН на уровне 0,5 и требуемый угол смещения Θc рабочих осей НХН 1 и 2 ЛГ относительно равносигнального направления по следующей формуле [16, с.5]:
Θc=0,3Θ0,5,
где ширина НХН рабочего лепестка на уровне 0,5 определяется по следующей формуле [16, с.5]:
Θ0,5=2Θ2;
Θ2 - это более точное значение угла Θ1, который определяется модифицированным методом Ньютона автоматически по следующей формуле [16, с.7]:
Θ2=Θj+1=Θj-(ΔΘF1)/(F2-F1),
при j=0, 1, 2, 3…Nп и |Θj+1-Θj|≤ΔΘ;
где Θj - значение угла Θ при j-ом приближении (при j=0 Θj=Θ1);
ΔΘ - шаг дискретизации угла (например, ΔΘ=0,0000001 рад);
F1=0,5-R1;
 ;
;
 .
.
k=πd/λ0.
Расчет точных значений ширины НХН на уровне 0,5 Θ0,5 и требуемого угла смещения Θc в среде Mathcad, версия 15.0, приведен в приложении Б (в данном примере он равен 0.0198718084 рад).
Используя дальномерную рейку, входящую в комплект ОМП, и сам ОМП, определяют средину расстояния между этими вехами L/2 (см. точку O на фиг.1), снимают с точки №2 ОМП, устанавливают в нее вертикально веху №2, устанавливают ОМП над точкой O, готовят его к работе в соответствии с инструкцией по эксплуатации, поворачивают его оптическую ось по направлению вращения часовой стрелки до совмещения с вехой, установленной в точке №1, поворачивают оптическую ось ОМП по направлению вращения часовой стрелки на угол, равный Θc, и устанавливают на этой оси на удалении L/2 от прибора, веху №3, поворачивают оптическую ось ОМП по направлению вращения часовой стрелки на угол, равный 180 градусам, устанавливают на этой оси на удалении L/2 от прибора веху №4, см. фиг.1, поворачивают оптическую ось ОМП против направления вращения часовой стрелки на угол, равный 2Θc, устанавливают на этой оси на удалении L/2 от прибора веху №5, см. фиг.1, поворачивают оптическую ось ОМП против направления вращения часовой стрелки на угол, равный 180 градусам, устанавливают на этой оси на удалении L/2 от прибора веху №6, см. фиг.1, совмещают оптическую ось ОМП с вехой, установленной в точке №1, поворачивают эту ось по направлению вращения часовой стрелки на угол 90 градусов и, используя дальномерную рейку, на этой оси на расстоянии, равным примерно 150 м, устанавливают ЗП фронтальный так, чтобы воображаемая рабочая ось его микрофона была примерно направлена на примерный центр РОВ и параллельна плоскости горизонта. НХН этого ЗП в горизонтальной плоскости, описываемой кардиоидой [17, см. с.21 и 22, что обеспечивает прием акустических сигналов преимущественно с фронта], соединяют вехи, установленные в точках №3 и №4 одним шнуром, а вехи, установленные в точках №5 и №6 другим шнуром, устанавливают на звеньях ленты, на которой закреплены ЗП с круговыми НХН в горизонтальной плоскости и имеется шкала, позволяющая передвигать ЗП, установленные на звеньях ленты, на рассчитанные расстояния между рабочими осями микрофонов соседних ЗП d, укладывают звенья ленты со ЗП вдоль указанных шнуров так, чтобы рабочие оси их микрофонов были примерно вертикальны, начиная от точки пересечения средин ЛГ ЗП, точки О. Убирают ОМП с точки О и шнуры.
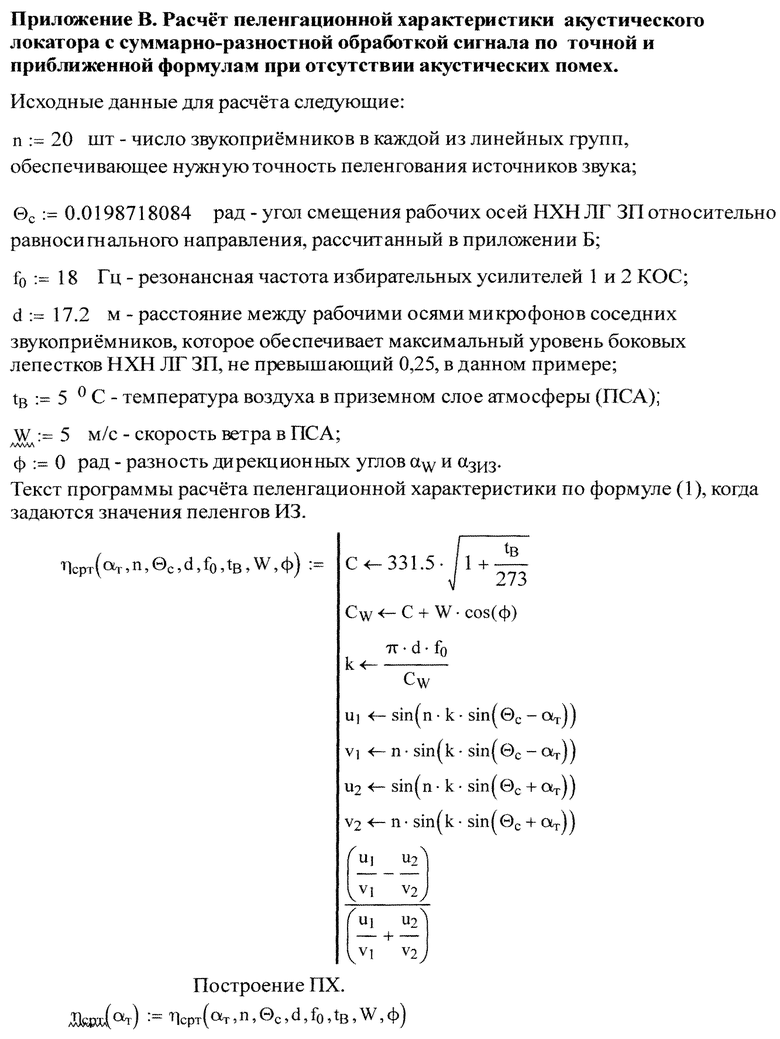
ЗП принимают акустические сигналы и помехи, преобразуют их в ЭС и помехи, далее они обрабатываются в 1 и 2 КОС, см. фиг.2, на выходе амплитудных детекторов этих КОС определяются величины постоянных напряжении U1 и U2, от сигналов и помех, пришедших только из рабочего сектора акустического локатора, которые затем преобразуются в двоичный цифровой код, который регистрируется соответствующими регистрами и автоматически вводится в ЭВМ. Последняя вычитает из постоянного напряжения U1 постоянное напряжение U2, складывает эти постоянные напряжения, получает отношение их разности к их сумме, т.е. рассчитывает его по формуле [16, с.7]
где
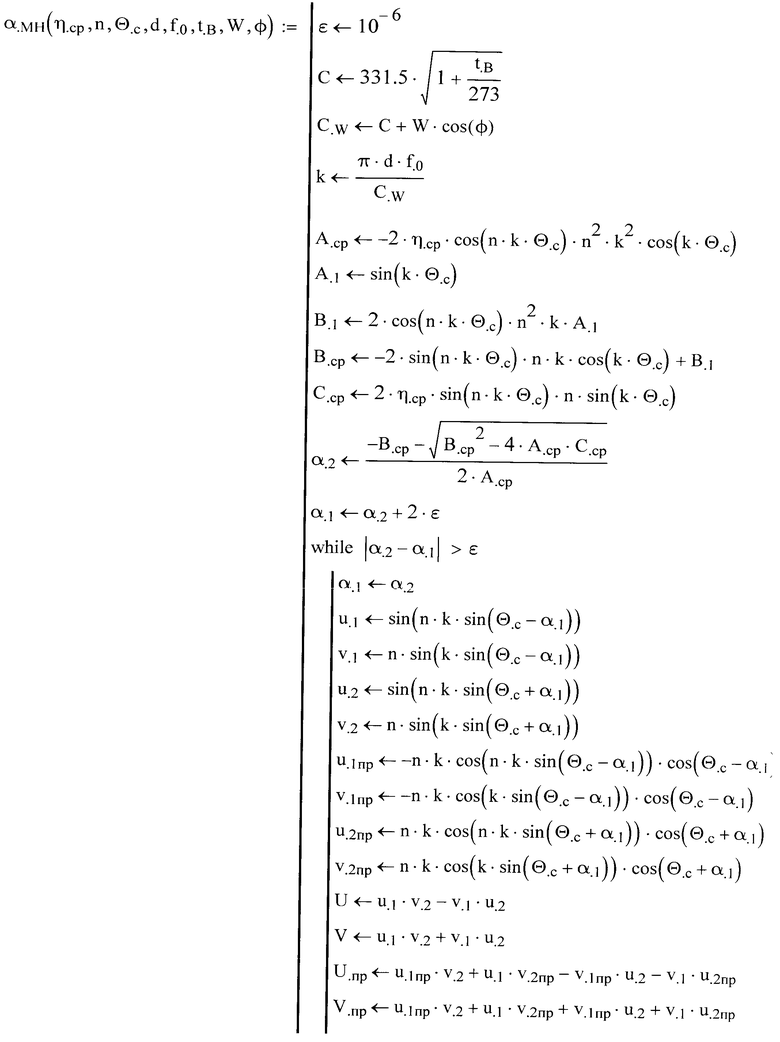
Пеленг ИЗ в этом случае определяется методом последовательных приближений (методом Ньютона, [16, с.7]) по следующей формуле:
α=αJ, при |αJ=αJ-1|≤ε и -Θc<α<Θc,
где ε - заданное значение модуля разности приближений пеленгов;
αJ и αJ-1 определяются из следующей формулы:

j - текущий номер приближения;
первая производная от вышеуказанной функции по пеленгу αj [19, с.308], т.е.
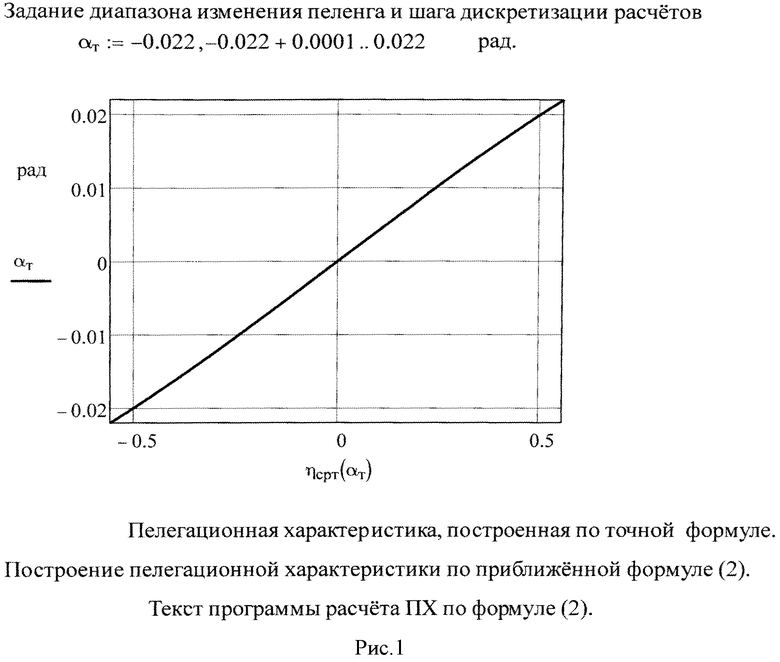
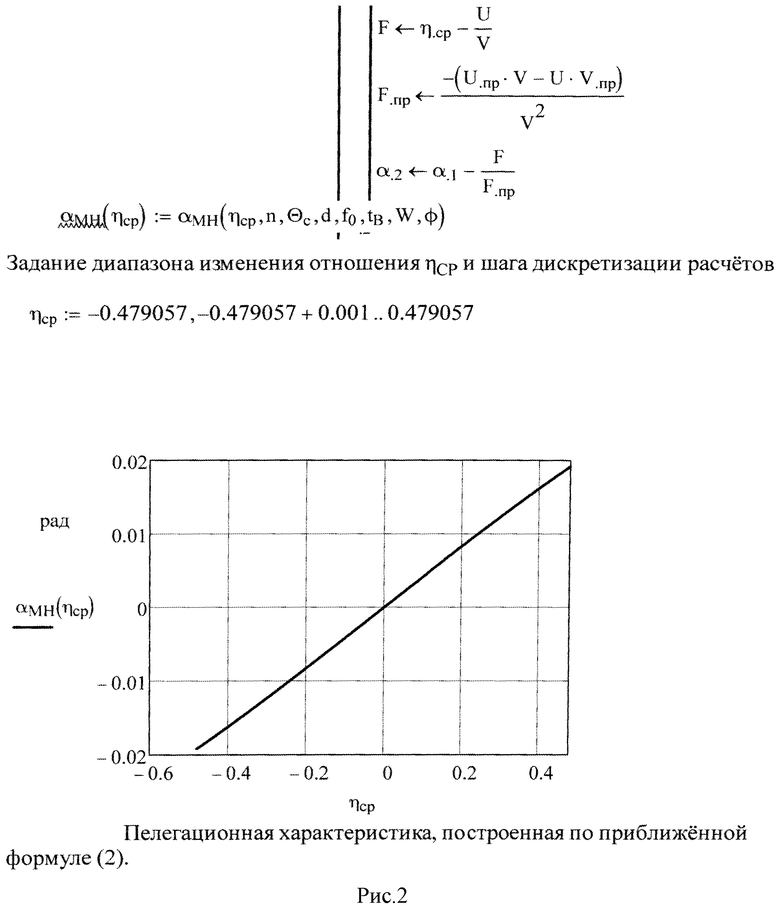
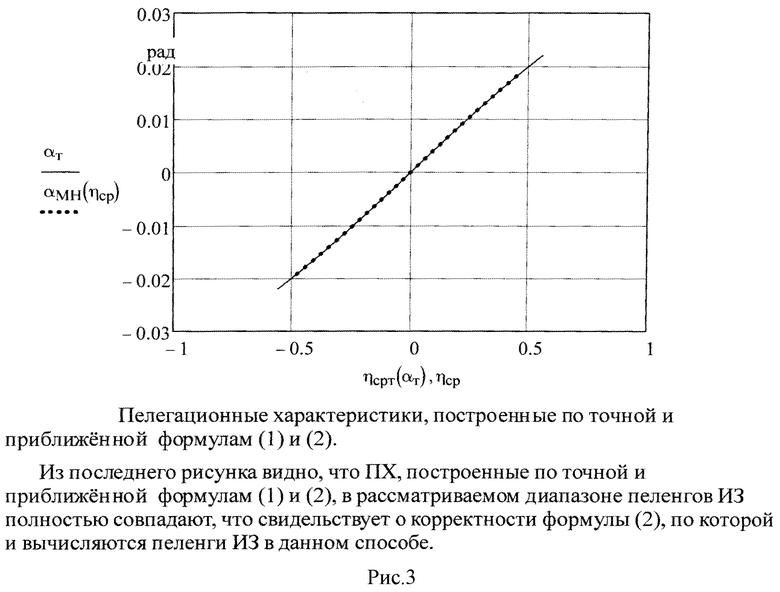
Корректность формулы (2) подтверждается расчетами, приведенными в приложении В.
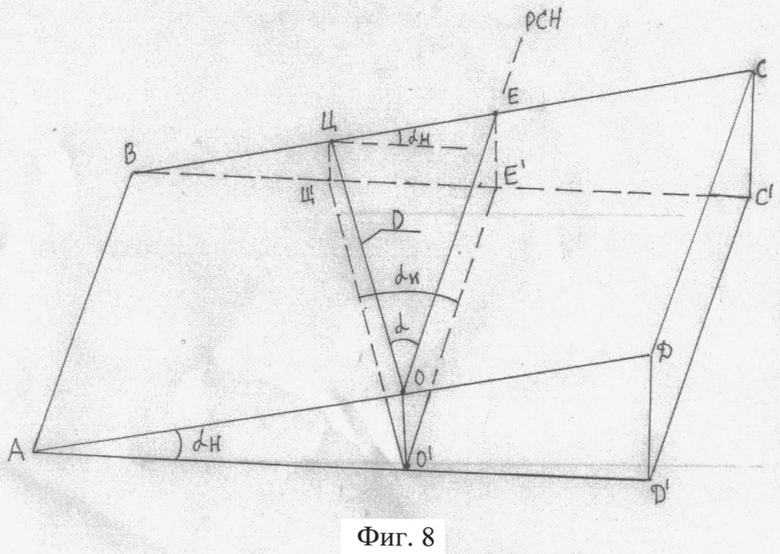
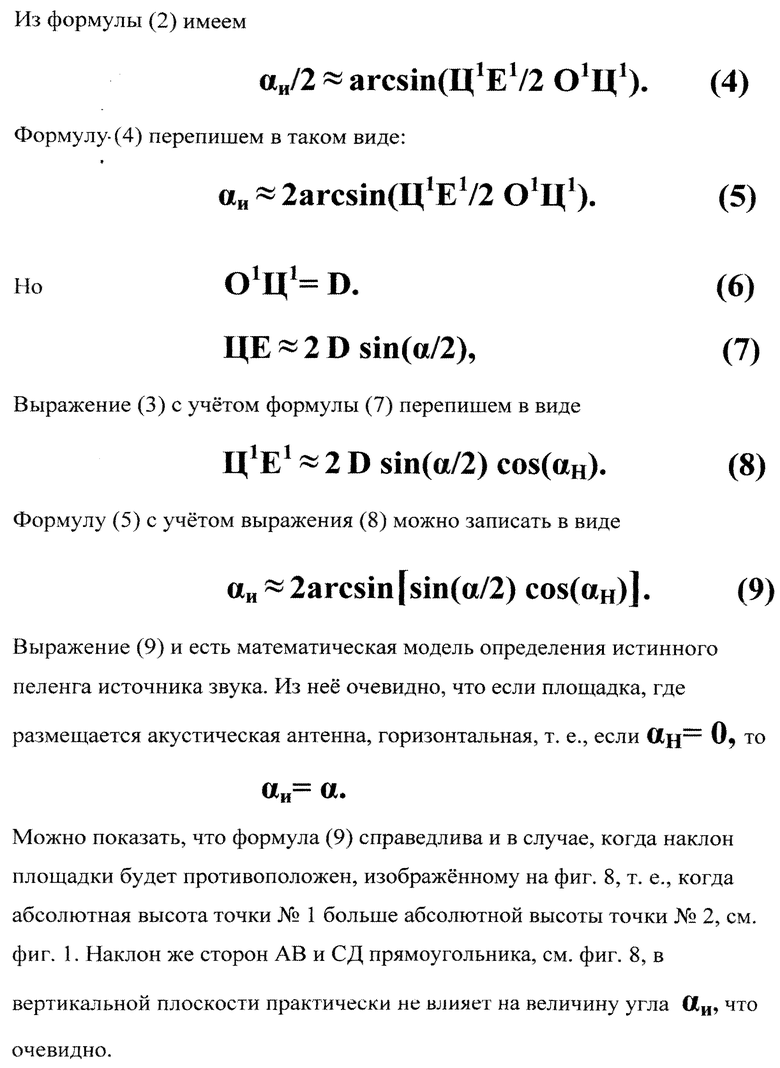
Пеленг ИЗ α, рассчитанный по формуле (2), будет справедлив для горизонтальной поверхности Земли. Для определения пеленга ИЗ при размещении акустической антенны на наклонных площадках поверхности Земли истинный пеленг ИЗ αИ, определяется по формуле (3)

что является также одним из главных существенных отличий от прототипа;
где αН - угол наклона площадки поверхности Земли, где размещена акустическая антенна локатора или пеленгатора, к горизонту, измеренный ОМП при развертывании этой антенны на местности, см. фиг.8.
Это в конечном счете повысит точность определения местоположения ИЗ (его топографических координат).
Корректность этой формулы (3) доказана в приложении Г.
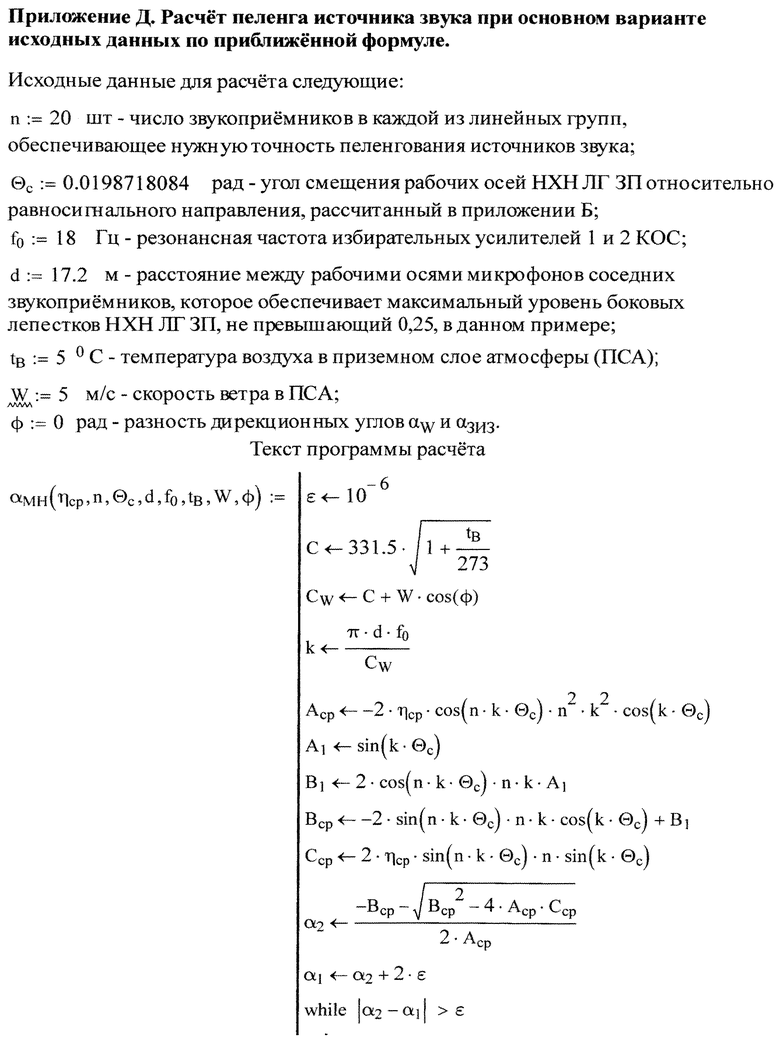
Расчет истинного пеленга ИЗ αИЗ в среде Mathcad, версия 15.0, с 3 примерами расчета при наклоне поверхности Земли в 30°, где размещены 1 и 2 ЛГ ЗП, к плоскости горизонта, см. в приложении Д.
Заявляемый способ иллюстрируется следующими графическими материалами:
Фиг.1 Схема развертывания линейных групп звукоприемников.
Фиг.2 Акустический локатор. Схема электрическая структурная.
Фиг.3 Пример НХН ЛГ, содержащих по 20 ЗП, в прямоугольной системе координат.
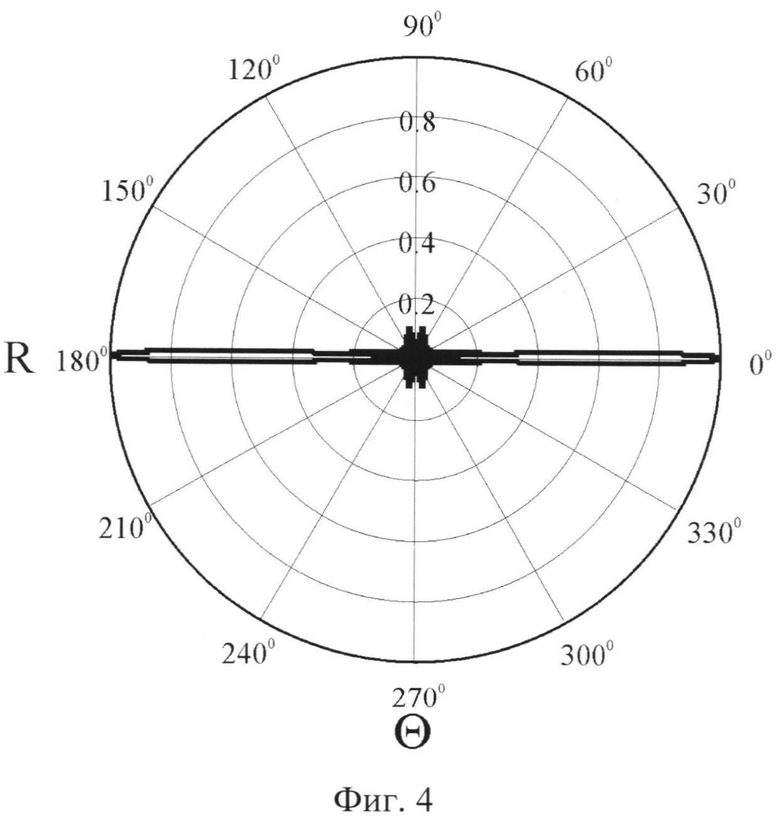
Фиг.4 Пример НХН ЛГ, содержащих по 20 ЗП, в полярной системе координат
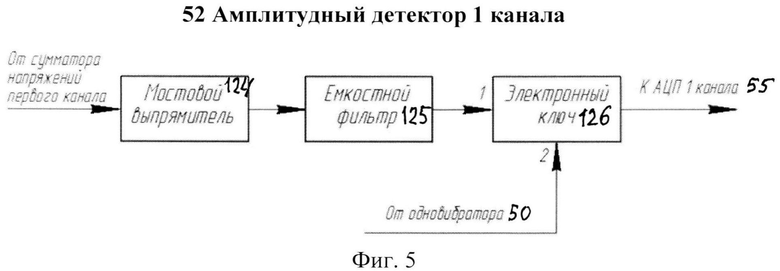
Фиг.5 Амплитудный детектор 1 канала. Схема электрическая структурная.
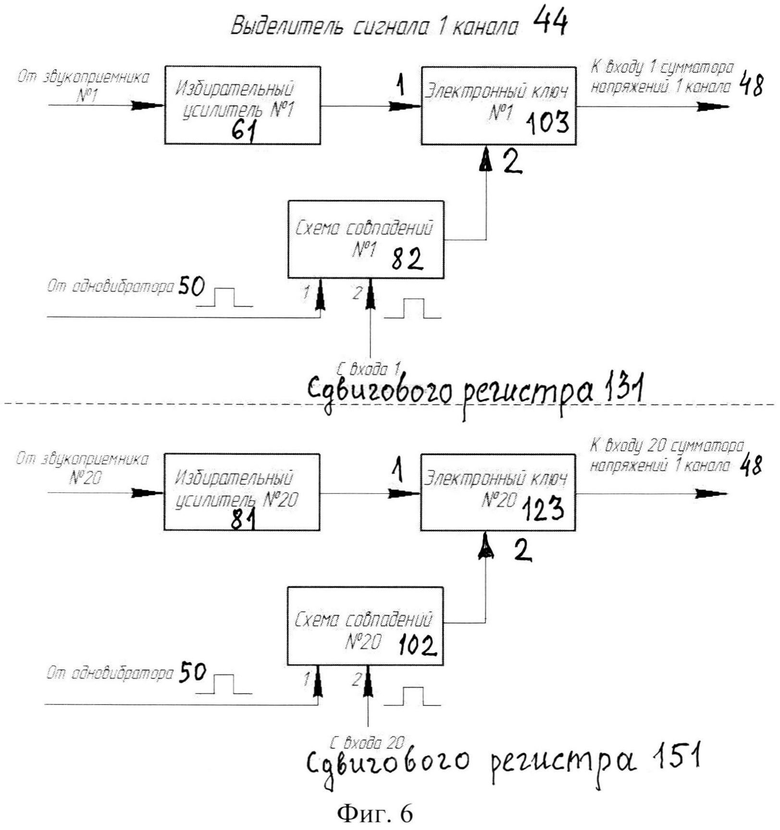
Фиг.6 Выделитель сигнала 1 канала. Схема электрическая структурная.
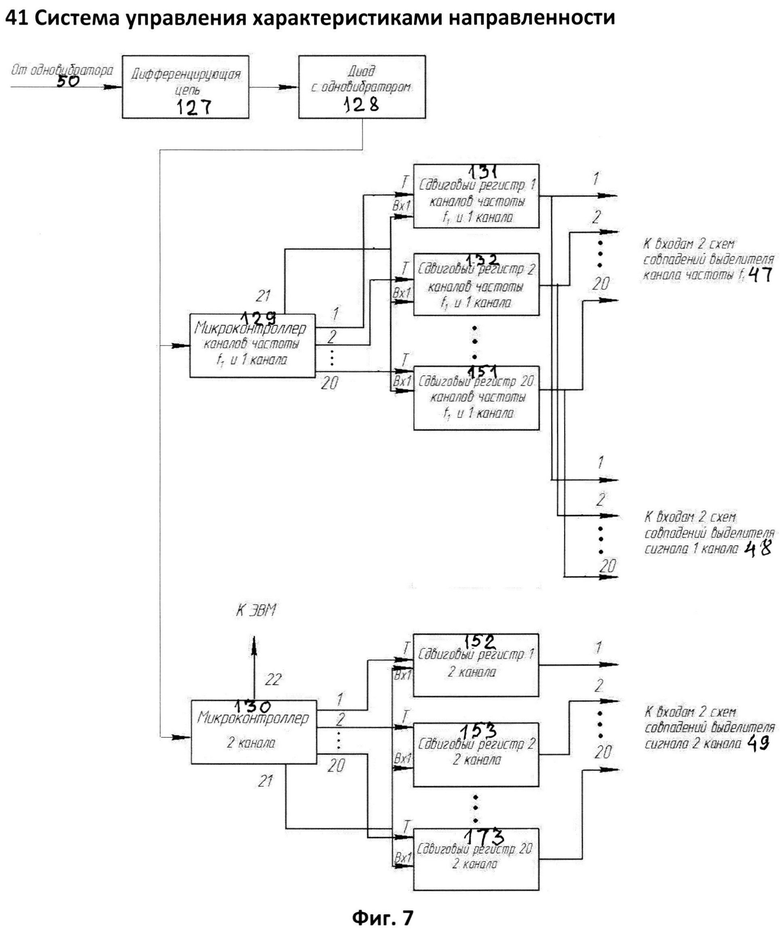
Фиг.7 Система управления характеристиками направленности. Схема электрическая структурная.
Фиг.8 К выводу формулы для расчета истинного пеленга источника звука при размещении акустической антенны локатора на наклонной площадке поверхности Земли.
Одним из вариантов электрической структурной схемы акустического локатора, реализующего предлагаемый способ измерения пеленга при использовании 20 ЗП в ЛГ (в этом случае можно показать, что обеспечивается высокая точность пеленгования ИЗ), приведен на фиг.2 [17, с.14], где показана более простая электрическая структурная схема по сравнению со схемой, приведенной в [15, с.2, фиг.1].
В ее состав входят 1 и 2 ЛГ, каждая из которых состоит из 20 малогабаритных ЗП, см. звукоприемники 1…40 на фиг.2, закрепленных на звеньях ленты; цепь формирования селекторного импульса (СФСИ), 42, 46 и 50; 1 КОС 44, 48, 52, 55 и 58; 2 КОС 45, 49, 53, 56 и 59; КОС частоты f1 43, 47, 51, 54 и 57; система управления характеристиками направленности (СУХН) 41; и ЭВМ 60.
Малогабаритные ЗП 1…40 ЛГ включают в себя всенаправленные низкочастотные микрофоны с предварительными усилителями микрофонного сигнала (УМС).
СФСИ, см. фиг.2, состоит из фронтального ЗП 42, триггера Шмитта 46 и ждущего мультивибратора (одновибратора) 50. Фронтальный ЗП 42 включает в себя микрофон с НХН, описываемой кардиоидой [15, с.29 и 30], предварительный УМС и избирательный усилитель (ИУ) с центральной частотой полосы пропускания 18 Гц.
Каждый КОС [15, с.2, см. фиг.1; 17, с.16] состоит из выделителя сигнала (ВС), см. 43…45 на фиг.2, сумматора напряжения (СН), см. 47…49 на фиг.2, амплитудного детектора (АД), см. 51…53 на фиг.2, аналого-цифрового преобразователя (АЦП), см. 54…56 на фиг.2, и регистра, см. 57…59 на фиг.2.
Центральная частота полосы пропускания ИУ BC 1 и 2 КОС равна 18 Гц. Это обусловлено тем, что частота гармоники с наибольшей амплитудой в спектре акустического сигнала, образованного, например, одиночным выстрелом (ОВ) из орудий, минометов и разрывов снарядов равна 18 Гц. Центральная частота полосы пропускания избирательных усилителей ВС КОС частоты f1 равна 19 Гц, что обусловлено математической моделью (ММ) определения дальности до ИЗ [15, с.28, формула (48)]. Каждый АД состоит, см. фиг.5 и [17, с.16], из последовательно соединенных между собой мостового выпрямителя (MB) 124, емкостного фильтра 125 и электронного ключа (ЭК) 126. ВС каждого КОС состоит (см. фиг.6 и [15, фиг.13]) из 20 ИУ, см. 61…81 на фиг.6; 20 ЭК, см. 103…123 на фиг.6; и 20 схем совпадения (СС) на 2 входа, см. 82…102 на фиг.6.
СУХН 41 [17, с.17] включает в себя, см. фиг, 7, дифференцирующую цепь (ДЦ) RC, см. 127 на фиг.7; диод с одновибратором, см. 128 на фиг.7; 2 микроконтроллера (МК) 129 и 130, к выходам 1…20 которых подключено по 20 сдвиговых регистров, см. 131…151 и 152…172 на фиг.7. Выход 21 МК каналов частоты f1 и 1 канала (см. 129 на фиг.7) подключен к информационным входам «Вх1» сдвиговых регистров каналов частоты f1 и 1 канала, 131…151. Выход 21 МК 2 канала 130 подключен к информационным входам «Вх1» сдвиговых регистров 2 канала 152…172. Выход 22 МК 2 канала 130 подсоединен ко входу ЭВМ (см. фиг.2 и 7). Выходы 1…20 МК 129 подсоединены к входам «Т» сдвиговых регистров каналов частоты f1 и 1 канала 131…151, на эти входы подаются тактовые импульсы (в общем случае с разными частотами следования) от МК 129. Выходы 1…20 МК 130 подсоединены к входам «Т» сдвиговых регистров 2 канала 152…172, на эти входы подаются также тактовые импульсы (в общем случае с разными частотами следования) от МК 130. Пример расчета частот следования тактовых импульсов приведен в приложении E.
Назначение устройств электрической структурной схемы акустического локатора следующее: ЗП 1 ЛГ 1…20 служат для преобразования акустических сигналов и помех в электрические сигналы (ЭС) и помехи, передачи их на ИУ ВС 1 канала 44 (см. фиг.2) и КОС частоты f1 43 (см. фиг.2).
ЗП 2 ЛГ 21…40 служат для преобразования акустических сигналов и помех в ЭС и помехи, передачи их на ИУ ВС 2 КОС 45 (см. фиг.2).
ЗП фронтальный 42 служит для преобразования акустических сигналов и помех в ЭС и помехи, передачи их на триггер Шмитта 46 (см. фиг.2). Триггер Шмитта 46 предназначен для преобразования ЭС и помех в прямоугольные импульсы с крутым переднем фронтом и передачи их на вход одновибратора 50.
Одновибратор 50 (см. фиг.2) служит для формирования прямоугольного импульса с крутым переднем фронтом длительностью tСИ (селекторного импульса) при поступлении на него первого импульса с триггера Шмитта 46 и передачи его на вход 1 СС, см. 82…102 на фиг.6, ВС всех КОС, на управляющий вход 2 ЭК АД, см. 126 на фиг.6, всех КОС и на вход ДЦ СУХН 127.
ИУ ВС 1 канала, см. 61…81 на фиг.6, и 2 каналов предназначены для выделения, усиления по напряжению ЭС с частотой f0, равной 18 Гц, из спектра ЭС и помех, поступающих со ЗП 1 ЛГ 1…20, и 2 ЛГ 21…40, и передачи их на вход 1 ЭК, см. 103…123 на фиг.6, соответствующих ВС этих каналов. ИУ ВС канала частоты f1 предназначены для выделения, усиления по напряжению ЭС с частотой f1, равной 19 Гц, из спектра ЭС и помех, поступающих со ЗП 1…20 ЛГ 1 КОС, и передачи их на вход 1ЭК ВС этого канала.
CC ВС (для 1 канала см. 82…102 на фиг.6) всех КОС предназначены для формирования прямоугольного импульса длительностью 0,5 с в момент подачи на вход 1 СС, см. 82…102 на фиг.6, селекторного импульса с одновибратора 50 длительностью tСИ, равной 1,5 си на вход 2 СС, см. 82…102 на фиг.6, прямоугольного импульса длительностью tСИМ, равной 0,5 с с соответствующих выходов сдвиговых регистров 131…172, см. фиг.7.
ЭК ВС, см. 103…123 на фиг.6, всех КОС предназначены для подачи ЭС из ИУ на СН соответствующего КОС в момент появления прямоугольного импульса, длительностью tСИМ с соответствующего выхода соответствующего МК при воздействии селекторного импульса с одновибратора СФСИ 50.
СН всех КОС 47…49 служат для суммирования всех ЭС, поступивших с соответствующих ИУ ВС, формирования суммарного сигнала и подачи его на вход АД своего канала 51…53.
АД 51…53 предназначены для преобразования ЭС, поступающих с СН соответствующих каналов 47…49, в постоянное напряжение, равное амплитуде этих суммарных ЭС и подачи этого постоянного напряжения на АЦП своих КОС 54…56. Причем на выходе 1 КОС постоянное напряжение будет равно U1, а на выходе 2 КОС - U2, а на выходе канала частоты f1 - 
Во всех КОС выходы СН 47…49 подключены к одной диагонали моста MB АД (в 1 КОС 124), а к другой диагонали этого моста - емкостный фильтр (конденсатор большой электрической емкости), (в 1 КОС 125), с которого суммарный ЭС подается на вход ЭК этого АД (в 1 КОС 126). Диоды моста включены так, чтобы напряжение на входе ЭК относительно его корпуса было положительно. Выходы ЭК АД (в 1 КОС 126) соответствующих каналов подключены ко входам АЦП этих каналов 54…56. MB предназначены для преобразования переменного тока, ЭС, поступающего с СН 47…49, в пульсирующий, который заряжает конденсатор большой электрической емкости практически до амплитудного значения входного напряжения.
Емкостные фильтры (в 1 КОС 125) служат для преобразования пульсирующего напряжения, поступающего с MB (в 1 КОС 124), в постоянное напряжение и фильтрации всех гармоник, возникающих на выходе MB, а также для подачи этого постоянного напряжения на вход ЭК (в 1 КОС 126).
ЭК АД (в 1 КОС 126) предназначены для передачи этого постоянного напряжения на вход АЦП 54…56 соответствующего канала при подаче на его управляющий вход 2 селекторного импульса с одновибратора с СФСИ 50. ДЦ RC СУХН 127 предназначена для формирования разнополярных экспоненциальных импульсов при поступлении селекторного импульса положительной полярности с одновибратора СФСИ 50 и подачи этих разнополярных импульсов на вход анода полупроводникового диода 128. Последний служит для выделения экспоненциального импульса положительной полярности и подачи его на вход одновибратора 128, который вырабатывает импульс положительной полярности длительностью 0,1 с, поступающий на вход обоих МК 129, 130 для синхронизации их работы.
Назначение остальных устройств СУХН, см. фиг.7, следующее: МК 1 канала и канала частоты f1 129 формирует на своих выходах 1…20 последовательность прямоугольных импульсов (тактовые импульсы (ТИ)) с определенными частотами следования, которые рассчитаны в соответствии с программой, см. приложение E, где представлен пример автоматического расчета частот следования тактовых импульсов с микроконтроллеров, и подает их на тактовые входы «Т» сдвиговых регистров 1 канала и канала частоты f1 131…151; а также вырабатывает импульс строба длительностью tисм, равный 0,5 с [15], поступающий с выхода 21 на информационные входы «Вх1» вышеуказанных сдвиговых регистров 131…151.
Аналогичные функции выполняет и МК 2 канала 130, но он подает со своих выходов 1…20 последовательность прямоугольных импульсов других частот на тактовые входы «Т» 1…20 сдвиговых регистров 2 канала 152…172; а также вырабатывает импульс строба длительностью tисм, равный 0,5 с [15], поступающий с выхода 21 на информационные входы сдвиговых регистров 2 канала «Вх1» 152…172. Кроме того он вырабатывает на своем выходе 22 сигнал, несущий информацию о положении НХН в секторе разведки АЛ, и подает ее в ЭВМ. На каждом из выходов 1…20 МК 129 и 130 своя частота следования ТИ, рассчитанная в соответствии с приложением Е. С выходов сдвиговых регистров 1…20 канала частоты f1 и 1 канала 131…151 поступают селекторные импульсы длительностью 0,5 с на входы 2 СС ВС 1 канала 82…102 и ВС канала частоты f1 43. С выходов сдвиговых регистров 1…20 2 канала 152…172 поступают селекторные импульсы длительностью 0,5 с на входы 2 СС ВС 2 канала. АЦП всех КОС 54…56 преобразуют постоянные напряжения в соответствующий цифровой двоичный код и передают его в свои регистры 57…59 соответственно. Регистры всех КОС 57…59 служат для регистрации соответствующего вышеуказанного цифрового кода и ввода его в ЭВМ 60. ЭВМ 60 при подготовке акустического локатора к звуковой разведке производит расчеты по определению следующих параметров и характеристик:
1. Скорости звука СW с учетом параметров ветра в ПСА и температуры воздуха в этом слое;
2. НХН 1 (2) ЛГ ЗП на основной рабочей частоте f0 и разных расстояниях d между рабочими осями микрофонов соседних ЗП ЛГ, при условии минимума уровня ее боковых лепестков и наиболее узкой ширине рабочего лепестка НХН на уровне 0,5;
3. Угла смещения рабочих осей НХН 1 и 2 ЛГ ЗП относительно равносигнального направления Θс;
4. Расстояния между рабочими осями микрофонов крайних ЗП в их ЛГ L.
5. Частот следования тактовых импульсов с выходов 1…20 МК 129 и 130 СУХН41.
ЭВМ в процессе ведения звуковой разведки АЛ, рассчитывает следующее:
1. Отношение ηCP;
2. Пеленг ИЗ α при горизонтальной поверхности Земли, где размещены 1 и 2 ЛГ ЗП, к плоскости горизонта;
3. Пеленг ИЗ αИ при наклонной поверхности Земли, где размещены 1 и 2 ЛГ ЗП;
4. Дальность D до ИЗ;
5. Топографическую координату Хц ИЗ;
6. Топографическую координату Уц ИЗ.
Затем присваивает номер ИЗ (цели), фиксирует время ее проявления и передает эту информацию на систему передачи данных.
Каждый из ЗП 1…40 включает в себя последовательно соединенные между собой микрофон, обеспечивающий прием акустических сигналов различных частот, и предварительный УМС, размещенные на определенном расстоянии друг от друга так, чтобы рабочие оси микрофонов были направлены примерно вертикально вверх, что обеспечивает круговую НХН их в горизонтальной плоскости.
Работает вышеуказанная электрическая схема, см. фиг.2, следующим образом. Импульсный акустический сигнал (радиоимпульс длительностью около 1 с), представляющий собой вначале нарастающую по амплитуде синусоиду и по достижении максимума амплитуды - затухающую по амплитуде синусоиду, образованный, например, одиночным выстрелом из артиллерийского орудия, расположенного в РОВ, сначала принимается фронтальным ЗП 42, который преобразует этот сигнал в ЭС. Этот ЭС поступает на вход триггера Шмитта 46, на его выходе примерно в течение 1 с образуется импульсный сигнал (меандр), который поступает на вход одновибратора (заторможенного мультивибратора) 50. При поступлении первого импульса с выхода триггера Шмитта 50 на выходе одновибратора 50 образуется прямоугольный импульс положительной полярности длительностью 1,5 с (селекторный импульс), который поступает (см. фиг.5) на входы 2 ЭК АД 1 канала 126, канала частоты f1, АД 2 канала, а также - на вход 1 СС ВС всех трех вышеуказанных каналов (в ВС 1 канала это СС 82…102). Кроме того этот селекторный импульс поступает и на вход ДЦ СУХН 127, см. фиг.7. В момент поступления селекторного импульса на вход ДЦ СУХН 127 на ее выходе образуется экспоненциальный импульс положительной полярности с крутым передним фронтом, который поступает на вход диода с одновибратором. На выходе последнего образуется синхронизирующий импульс положительной полярности длительностью 0,1 с, который поступает на вход МК каналов частоты f1 и 1 канала 129, а также на вход МК 2 канала 130 и запускает их в синхронную работу. На выходах 1…20 этих МК 129 и 130 образуются импульсные сигналы (тактовые импульсы) с соответствующими разными частотами следования, заданными в соответствии с программами, заложенными в эти МК и рассчитанными для различных дальностей на основе приложения E, которые поступают на входы «Т» сдвиговых регистров 1…20 каналов частоты f1 и 1 канала 131…151, а также - 2 канала 152…172. Кроме того с выходов 21 обоих МК 129 и 130 формируется прямоугольный импульс положительной полярности длительностью tисм, равный 0,5 с (импульс строба), который поступает на информационные входы «Вх1» сдвиговых регистров 1…20 каналов частоты f1 и 1 канала 131…151, а также - 2 канала 152…172. На выходе этих регистров 1…20 по истечении времен задержки, обусловленных разными частотами следования тактовых импульсов (в общем случае в разные моменты времени) появляются эти импульсы строба, которые (см. фиг.6) поступают на вход 2 СС №1…СС №20 ВС всех 3 вышеуказанных каналов (в 1 канале это СС 82…102).
Кроме того на выходе 22 МК 2 канала 130 образуется ЭС в двоичном цифровом коде, несущий информацию о положении НХН акустической антенны акустического локатора в секторе его разведки.
На выходах СС №1…СС №20 ВС всех 3 этих каналов в соответствующие моменты времени образуются прямоугольные импульсы строба, длительностью 0,5 с, поступающие на входы 2 ЭК №1…ЭК №20 всех 3 вышеуказанных каналов, в ВС 1 канала это ЭК 103…123, см. на фиг.6.
После фронтального ЗП 42 акустический сигнал достигает ЗП 1 ЛГ (ЗП 1…ЗП 20 и 2 ЛГ (ЗП 21…ЗП 40), где преобразуются в ЭС, усиливаются УМС и поступают на ИУ №1…ИУ №20 всех 3 вышеуказанных каналов (в 1 канале это ИУ 61…81. На выходах последних образуются радиоимпульсы длительностью около 1 с, которые через ЭК №1…ЭК №20 всех 3 вышеуказанных каналов (в 1 канале это 103…123, см. фиг.6), поступают на входы 1…20 СН этих 3 каналов, см. 47…49 на фиг.2. На выходе СН каждого из каналов 47…49 образуются радиоимпульсы в общем случае с разными амплитудами напряжения длительностью около 1 с (суммарные сигналы), поступающие на MB, см. 124 на фиг.5, которые заряжают конденсаторы емкостных фильтров 125 соответствующих 3 каналов до определенного напряжения, определяемого максимальной амплитудой напряжения радиоимпульсов, поступающих на вход соответствующих MB. С выходов АД соответствующих 3 каналов 51…53 постоянные напряжения U1, U2 и 
При поступлении акустических помех (звуков от одиночных выстрелов и залпов батарей нашей артиллерии и минометов, звуков от одиночных выстрелов и залпов батарей артиллерии и минометов противника, находящихся вне рабочего сектора акустического локатора, который равен 2Θc, т.е. он очень мал, звуки от летящих самолетов, вертолетов, которые будут также вне рабочего сектора) не будут проходить на выход выделителей сигналов всех КОС. Поэтому акустический локатор обладает высочайшей помехозащищенностью и поэтому способен вести эффективно звуковую разведку в современном общевойсковом бою, что не могут делать все современные средства звуковой разведки стран мира, в том числе звуко-тепловые комплексы.
Техническая реализация вышеназванного способа возможна, что покажем ниже.
В качестве микрофонов ЗП 1…40 целесообразно использовать малогабаритные электретные микрофоны МКЭ-389, выпускаемые Тульским ОАО «ОКБ «Октава».
ЗП фронтальный по своему составу аналогичен ЗП 1…40, но микрофон у него может быть типа МКЕ 802 [20, с.126], КМКЭ-1 [20, с.130] или KMC-19-03 (ветрозащитный) [20, с.130].
В качестве ИУ 61…81, имеющихся в ВС 43…45, можно использовать, например, ИУ на операционном усилителе (ОУ) с двойным Т-образным мостом. [21, с.167, 168]
В качестве СН 47…49 можно использовать устройства на основе операционного усилителя [22, с.213, 214].
В качестве АД 51…53 во всех трех каналах можно применить, например, АД гармонических и негармонических сигналов [23]
В качестве АЦП 54…56 во всех трех каналах можно использовать К572ПВ3 или К572ПВ4 [24, с.110].
В качестве регистров 57…59 во всех трех каналах и в системе управления характеристики направленности можно использовать, например, 8-разрядный сдвигающий регистр К555ИР8 [24, с.117].
В качестве ЭВМ 60 целесообразно использовать, например, Pentium IV 1700 MHz/512 Mb DDR/60 Gb HDD 7200 rpm.
В качестве триггера Шмитта 46 можно использовать, например, интегральные микросхемы К118ТЛ1А и ее модификации [25, с.39] или устройства на основе ОУ, описанные в [21, с.186].
В качестве одновибратора 50 целесообразно использовать, например, интегральные микросхемы К224АГ2 [21, с.192-194] или К155АГ3 [21, с.116].
В качестве электронных ключей (в ВС 1 канала это 103…123), (в АД 1 канала 126) целесообразно использовать, например, ключи на полевых транзисторах, описанные в [26, с.68 и 69].
В качестве микроконтроллеров 129 и 130 целесообразно использовать, например, устройства, описанные в [27].
В качестве СС (в ВС 1 канала 82…102) целесообразно использовать, например, логические элементы «И», описанные в [24].
Таким образом, вышеуказанные устройства, которые необходимы для реализации данного способа технически реализуемы.
Список использованных источников.
1. Таланов А.В. Звуковая разведка артиллерии. - М.: Воениздат министерства вооруженных сил Союза ССР, 1948. - 400 с.
2. Таланов А.В. Артиллеристская звуковая разведка. - М.: Воениздат, 1957. - 350 с.
3. Сергеев В.В. Основания устройства и элементы проектирования звукометрической аппаратуры. - Пенза: ПВАИУ, 1964. - 143 с.
4. Автоматизированный звукометрический комплекс АЗК-5. (Изделие 1Б17) Техническое описание. БМ, 1977.
5. Автоматизированный звукометрический комплекс АЗК-7. Техническое описание. БМ, 1987.
6. Патент США №3042897, кл. 340-6. Гидроакустический пеленгатор. Опубликован в 1962 г. Бюллетень №20, 1962.
7. Авторское свидетельство на изобретение №245909. Способ измерения скорости и направления ветра. /Теплухин В.А., Шмелев В.В./. Приоритет изобретения 18.12.85 г.
8. Патент ФРГ №1807535, кл. G01S. Акустический пеленгатор. Опубликован в 1970 г. Бюллетень №24.
9. Патент ФРГ №2027940 кл. G01S 3/80. Акустический пеленгатор. Опубликован в 1977 г. Бюллетень №7.
10. Патент РФ №2138059 кл. G01S 3/00, 3/80, 15/08. Акустический пеленгатор /Волощенко В.Ю./ Опубликован 20.09. 1999 г. Бюллетень №26.
11. Патент РФ №2048678 кл. G01S 3/80. Пеленгатор источников акустических излучений. /Хохлов В.К. и др./. Опубликован 20.11.1995 г.
12. Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982. - 200 с.
13. Пат. 2274873 Российская Федерация, МПК G01S 3/00. Акустический пеленгатор / Шмелев В.В. и др.; Заявитель и патентообладатель Тульский ГУ. №2004103751/09; заявл. 09.02.2004; опубл. 20.04.2006, Бюл. №11. - 24 с.
14. Пат. 2276383 Российская Федерация, МПК G01S 3/80, 3/803, 5/20. Способ определения дальности до источника звука. / Шмелев В.В. и др.; Заявитель и патентообладатель Тульский ГУ. №2004103752/09; заявл. 09.02.2004; опубл. 10.05.2006, Бюл. №13. - 24 с.
15. Пат. 2374665 Российская Федерация, МПК G01S 15/02. Акустический локатор Шмелев В.В.; заявитель и патентообладатель Тульский АИИ. - №2008122513/28; заявл. 06.06.2008; опубл. 27.11.2009, Бюл. №33.
16. Пат. 2323449 Российская Федерация, МПК G01S 3/80, 3/803, 5/20. Способ определения пеленга источника звука. / Шмелев В.В. и др.; Заявитель и патентообладатель Тульский ГУ. №2006138753/09; заявл. 02.11.2006; опубл. 27.04.2008, Бюл. №12. - 24 с. Прототип.
17. Шмелев В.В. Прикладная теория равносигнальных акустических локаторов: Монография. - Тула: Гриф и К. - 2012. - 154 с.
18. Перископическая артиллерийская буссоль ПАБ-2АМ. Техническое описание и инструкция по эксплуатации. - БМ, 39 с.
19. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1964. - 608 с.
20. Иофе В.К., Корольков В.Г., Сапожков М.А. Справочник по акустике. - М.: Связь, 1979. - 312 с.
21. Забродин Ю.С. Промышленная электроника: Учебник для вузов. - М.: Высшая школа, 1992. - 496 с.
22. Павлов В.Н. Ногин В.Н. Схемотехника аналоговых электронных устройств. - М.: Горячая линия Телеком, 2001. - 320 с.
23. Пат. 2399150 Российская Федерация, МПК H03D 3/00. Амплитудный детектор гармонических и негармонических электрических сигналов / Шмелев В.В. и др.; Заявитель и патентообладатель Тульский ГУ. №2009124021/09; заявл. 23.06.2009; опубл. 10.09.2010, Бюл. №25.
24. Справочник разработчика и конструктора РЭА. Элементная база. Книга I. - М.: Итар-ТАСС, 1993. - 157 с.
25. Булычев А.Л., Галкин В.И., Прохоренко В.А. Аналоговые интегральные схемы: Справочник. - Минск: Беларусь, 1993. - 382 с.
26. Смирнов В.А., Лебеденко И.С. Электронные устройства приборов. - Тула: ТулГУ, 2007. - 240 с.
27. Микроконвертор «AD u C 812» фирмы Analog Devices, см. сайт в сети «Интернет» «www.analog.Com», 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА | 2006 |
|
RU2323449C1 |
| АКУСТИЧЕСКИЙ ЛОКАТОР ИМПУЛЬСНЫХ ИСТОЧНИКОВ ЗВУКА | 2013 |
|
RU2529827C1 |
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 2004 |
|
RU2274873C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ЗВУКА | 2004 |
|
RU2276383C2 |
| АКУСТИЧЕСКИЙ ЛОКАТОР | 2008 |
|
RU2374665C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2006 |
|
RU2331904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА В НИЖНИХ СЛОЯХ АТМОСФЕРЫ | 2006 |
|
RU2339980C2 |
| АМПЛИТУДНЫЙ ДЕТЕКТОР ГАРМОНИЧЕСКИХ И НЕГАРМОНИЧЕСКИХ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ | 2009 |
|
RU2399150C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АРТИЛЛЕРИИ ПРОТИВНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (РЕАЛИЗАЦИИ) | 2015 |
|
RU2624483C2 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |



Изобретение относится к акустическим пеленгаторам (АП), акустическим локаторам (АЛ) и может быть использовано для определения пеленга источника звука (ИЗ). Задачей изобретения является повышение точности пеленгования ИЗ при наклонных к плоскости горизонта поверхностях Земли, где размещается акустическая антенна, и сокращение времени на определение пеленга этого источника. Пеленг ИЗ в данном способе определяют следующим образом: измеряют температуру воздуха, скорость ветра, дирекционный угол его направления в приземном слое атмосферы и вводят их в электронную вычислительную машину, намечают по топографической карте район особого внимания (РОВ), где могут размещаться огневые позиции артиллерии и минометов, выбирают на местности ровную площадку примерно прямоугольной формы длиной не менее трехсот метров и шириной не менее десяти метров, большие стороны которой были бы примерно перпендикулярны направлению на примерный центр РОВ, измеряют угол наклона этой площадки к плоскости горизонта и с учетом этого угла, используя оптико-механический прибор и дальномерную рейку, устанавливают ЗП специальным образом на местности, принимают акустические сигналы и помехи, преобразуют их в электрические сигналы и помехи, обрабатывают в 1 и 2 каналах обработки сигналов АП или АЛ, определяют на выходе этих каналов постоянные напряжения U1 и U2, пришедшие только из РОВ, вычитают из напряжения U1 напряжение U2, складывают эти напряжения, получают отношение разности к их сумме ηСР и автоматически по программе вычисляют истинный пеленг источника звука αИ. 8 ил.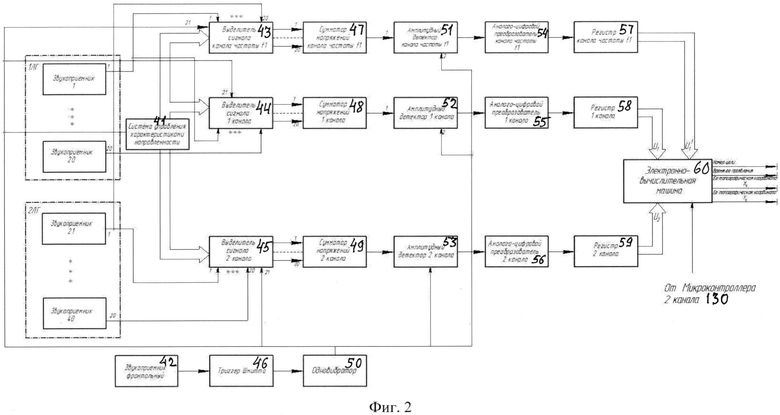
Способ определения пеленга источника звука при размещении акустической антенны акустического локатора на наклонных площадках поверхности Земли, при котором измеряют температуру воздуха tВ, скорость ветра W, дирекционный угол его направления αW в приземном слое атмосферы, вводят их, а также резонансную частоту избирательных усилителей первого, второго каналов обработки сигнала акустического локатора f0 и число звукоприемников в каждой линейной группе n в электронную вычислительную машину, намечают по топографической карте район особого внимания, где могут размещаться огневые позиции артиллерии и минометов, выбирают на местности относительно ровную площадку примерно прямоугольной формы длиной не менее трехсот метров и шириной не менее десяти метров, большие стороны которой были бы примерно перпендикулярны направлению на примерный центр района особого внимания, намечают точку номер один приблизительно на средине ширины в начале этой площадки, устанавливают над ней оптико-механический прибор, готовят его к работе, поворачивают оптическую ось этого прибора по направлению вращения часовой стрелки на какой-либо ориентир в сторону примерного центра района особого внимания, измеряют этим прибором дирекционный угол направления с этой точки на этот ориентир αзиз и вводят его в электронную вычислительную машину, рассчитывают с ее помощью скорость звука с учетом влияния ветра и температуры воздуха CW, с помощью электронно-вычислительной машины строят графики нормированных характеристик направленности линейных групп звукоприемников при разных расстояниях между рабочими осями микрофонов соседних звукоприемников d в прямоугольной системе координат, находят по этим графикам нормированную характеристику направленности линейных групп звукоприемников, когда ширина ее рабочего лепестка на уровне ноль целых пять десятых Θ0,5 и уровень ее боковых лепестков были минимальные, определяют по ней примерное положительное значение половины ее ширины на уровне ноль целых пять десятых Θ1, рассчитывают на электронно-вычислительной машине ширину рабочего лепестка на уровне ноль целых пять десятых Θ0,5, угол смещения рабочих осей нормированных характеристик направленности первой и второй линейных групп звукоприемников относительно равносигнального направления ΘC и требуемую длину линейных групп звукоприемников при их развертывании на местности L, отличающийся тем, что поворачивают оптическую ось оптико-механического прибора относительно вышеуказанного ориентира по направлению вращения часовой стрелки на угол девяносто градусов, относят дальномерную рейку, входящую в комплект этого прибора, на расстояние вдоль оптической оси этого прибора, на рассчитанное расстояние L, устанавливают в эту точку веху номер два, убирают с точки номер один оптико-механический прибор, устанавливают вертикально в эту точку определенной высоты веху номер один, переносят оптико-механический прибор к точке номер два, убирают веху номер два с этой точки и устанавливают над ней оптико-механический прибор, готовят его к работе, устанавливают высоту расположения его оптической оси, равной высоте вехи, установленной в точке номер один, поворачивают оптическую ось этого прибора по направлению вращения часовой стрелки до совмещения ее с вехой номер один, перемещают оптическую ось этого прибора в вертикальной плоскости к верхнему концу вехи номер один, измеряют угол наклона поверхности Земли к плоскости горизонта αн и вводят его в электронно-вычислительную машину, снимают с точки номер два прибор, устанавливают в нее вертикально вторую веху, устанавливают прибор на средине расстояния между этими вехами, готовят его к работе, поворачивают его оптическую ось по направлению вращения часовой стрелки до совмещения с вехой, установленной в точке номер один, поворачивают оптическую ось этого прибора по направлению вращения часовой стрелки на угол, равный ΘC, находят на его оси точку номер три, удаленную от этого прибора на расстояние половины L, устанавливают в этой точке веху номер три, поворачивают оптическую ось прибора по направлению вращения часовой стрелки на угол сто восемьдесят градусов, находят на оптической оси этого прибора точку номер четыре, удаленную от прибора на расстояние половины L, устанавливают в этой точке веху номер четыре, поворачивают оптическую ось этого прибора против направления вращения часовой стрелки на угол, равный 2ΘC, находят на оптической оси этого прибора на удалении половины L от него точку номер пять и устанавливают в нее веху номер пять, поворачивают оптическую ось этого прибора против направления вращения часовой стрелки на угол сто восемьдесят градусов, находят на удалении половины L от прибора на этой оси точку номер шесть и устанавливают в ней веху номер шесть, совмещают оптическую ось этого прибора с вехой, установленной в точке номер один, поворачивают эту ось данного прибора по направлению вращения часовой стрелки на угол девяносто градусов, находят на оптической оси его точку, удаленную от прибора примерно на сто пятьдесят метров, устанавливают над ней звукоприемник фронтальный с нормированной характеристикой направленности в горизонтальной плоскости, описываемой кардиоидой, так, чтобы рабочая ось его микрофона была примерно параллельна плоскости горизонта и направлена на примерный центр района особого внимания, соединяют вехи три и четыре одним шнуром, а вехи пять и шесть другим шнуром, устанавливают на звеньях лент звукоприемники так, чтобы расстояние между рабочими осями микрофонов соседних звукоприемников было равно d, а эти оси были направлены примерно вертикально вверх, убирают этот прибор со средины расстояния между вехами номер один и два, прокладывают вдоль вышеуказанных шнуров звенья ленты со звукоприемниками, начиная с точки, где стоял оптико-механический прибор, соединяют звукоприемники линиями связи с остальной аппаратурой акустического локатора, принимают акустические сигналы и помехи, преобразуют их в электрические сигналы и помехи, обрабатывают в первом и втором каналах обработки сигналов, определяют на выходе этих каналов обработки постоянные напряжения U1 и U2, вычитают из напряжения U1 напряжение U2, складывают эти напряжения, получают отношение разности к их сумме ηСР и автоматически по программе вычисляют пеленг источника звука при отсутствии наклона поверхности Земли к плоскости горизонта α, а затем вычисляют по формуле истинное значение пеленга источника звука ηИ.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ЗВУКА | 2004 |
|
RU2276383C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА | 2006 |
|
RU2323449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2006 |
|
RU2331904C1 |
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 2004 |
|
RU2274873C2 |
| US6185152 B1, 06.02.2001 | |||

