Область техники, к которой относится изобретение
Изобретение относится к области способов и устройств акустической пассивной локации и может быть использовано в системах управления огнем артиллерии.
Изобретение относится к методам и средствам прицеливания и наводки. Способ применим также в случае выхода из строя системы измерения дальности собственной радиолокационной системы, в т.ч. при постановке радиопомех.
Уровень техники
Известно устройство - Переносная радиолокационная станция наземной разведки «Кредо-М1» (Режим доступа: www.rusarmy.com). Назначение устройства:
- Автоматическое обнаружение и сопровождение наземных и надводных движущихся объектов.
- Охрана стратегических объектов и территорий.
- Корректировка стрельбы артиллерии по разрывам снарядов.
Устройство обеспечивает:
- Цветовое кодирование целей.
- Ввод цифровой карты местности.
- Формирование контрольных рубежей и запретных зон.
- Автоматическая выдача сигнала тревоги при нарушении контрольных рубежей.
Известно также устройство - Радиолокационная станция наземной артиллерийской разведки «СНАР-10М» (Режим доступа: www.rusarmy.com). Назначение устройства:
- Разведка движущихся колонн (ракетных, артиллерии), одиночных движущихся наземных целей (танк, бронетранспортер, автомобиль, группа людей), а также надводных целей (катер, корабль ит.п.).
- Контроль стрельбы (корректировка огня) своей артиллерии.
Известно также устройство - Радиолокационный комплекс разведки позиций ракет и артиллерии «Зоопарк-1» (Режим доступа: www.rusarmy.com). Назначение устройства:
- Определение координат огневых позиций противника (минометов, полевой артиллерии, систем залпового огня).
- Контроль и корректировка стрельбы собственных огневых средств.
Все эти устройства имеют следующий недостаток: они могут быть обнаружены системами радиоэлектронной разведки противника и поэтому быстро уничтожены.
Известно также устройство - Акустический локатор импульсных источников звука, прототип устройства (патент РФ №2529827, опубликовано: 27.09.2014 Бюл. №27).
Данное устройство относится к звукометрическим станциям (звукометрическим комплексам) и может быть использовано для определения удаления источника звука (ИЗ) от акустического локатора, его исправленного звукометрического угла и топографических координат (ТК) этого ИЗ. Он включает в себя левую (ЛЛГ) и правую линейные группы (ПЛГ) звукоприемников (ЗП), каждая из которых состоит из 3 ЗП, причем средины этих ЛГ удалены по фронту друг от друга на несколько сотен метров и примерно на несколько километров от линии боевого соприкосновения войск, три канала обработки сигнала (КОС), электронно-вычислительную машину (ЭВМ), цепь формирования селекторного импульса (ЦФСИ) и систему управления характеристиками направленности ЛГ ЗП, позволяющую обрабатывать сигналы в КОС лишь в определенные моменты времени, определяемые программами, установленными в 2 ее микроконверторах, что повышает помехозащищенность акустического локатора и обеспечивает получение ТК ИЗ, находящихся в секторе разведки. Первый КОС и канал частоты состоят из выделителя сигнала (ВС), сумматора напряжений (СН), амплитудного детектора (АД), аналого-цифрового преобразователя и последовательно соединенного с ним регистра, который соединен с ЭВМ. Второй КОС включает в себя ВС, СН, АД, систему измерения времени (СИВ) и 2 регистра, соединенных с ЭВМ. СИВ измеряет число импульсов (с периодом повторения 1 мс) до момента прихода импульсного акустического сигнала к ПЛГ ЗП, а также к ЛЛГ ЗП, ЦФСИ содержит в себе последовательно включенные между собой фронтальный ЗП, триггер Шмита и одновибратор. Канал частоты f1 обрабатывает электрический сигнал частотой f1, а первый и второй - частотой f0. В результате обработки сигналов в первом КОС и канале частоты f1 ЭВМ рассчитывает дальность до ИЗ, а в результате обработки сигналов во втором КОС ЭВМ рассчитывает исправленный звукометрический угол, а потом и ТК ИЗ.
Недостатками данного устройства являются сложная система развертывания устройства, трудоемкая система корректировки топографических координат источника звука и невысокая точность определения этих координат.
Сущность изобретения
Техническая задача изобретения заключается в повышении точности и качества определения местоположения наземных и надводных орудий артиллерии противника, путем фиксации звука выстрела этих орудий противника.
Поставленная задача решается тем, что с помощью фиксации звука выстрела орудия противника, определяется точное местоположение данного орудия.
Отличительными признаками является то, что в способе используется фиксации звука выстрела орудия противника тремя или более датчиками.
Техническое решение данного способа позволяет создать простое, надежное, оперативное устройство для определения местоположения орудия противника.
Техническая сущность предложенного способа решения поясняется чертежами, на которых:
Фиг. 1. Схема для расчета местоположения орудия в множестве D.
Фиг. 2. Схема для расчета местоположения орудия в множестве В.
Фиг. 3. Схема для расчета местоположения орудия на перпендикуляре n.
На всех схемах показаны: прямая fghv. где в точках f, g, h расположены датчики звука. Из середины отрезка fg проведен перпендикуляр l, а из точки g проведен перпендикуляр m. и из середины отрезка gh проведен перпендикуляр n. Эти перпендикуляры делят пространство перед линией fghv на четыре множества А, В, С, I). что необходимо, так как для каждого множества мест расположения орудий применяются различные методы расчета.
Для начала рассмотрим расположение орудия в множестве D, точка s (Фиг. 1). Из точки v проведем перпендикуляр к точке s (место расположения орудия). Все точки f, g, h, v, s расположены в одной плоскости. Для решения задачи (определения месторасположения орудия в точке s) рассмотрим три прямоугольных треугольника: fvs, gvs, hvs. Отсюда видно, что все треугольники имеют общий катет vs. Отрезки fg и gh примем одинаковыми и равными, например, 50 метров. Для удобства расчетов примем следующие обозначения отрезков прямых:

При этом (при измерении в метрах):
μ=ϕ+100, ρ=ϕ+50.
Вначале примем (при измерении в метрах), что известно, где находится точка s (β=3000, δ=2000), тогда α=3037,451; γ=2962,92; μ=2286.068: ρ=2236,068; ϕ=2186,068. Скорость звука примем равной vзв=330 м/сек. Тогда время прихода звука выстрела для каждого датчика будет равно:

Теперь решим обратную задачу. Известно: датчики звука (микрофоны) находятся в точках f, g, h на прямой, точка v также находятся на этой прямой; μ=ϕ+100, ρ=ϕ+50; первым звук от выстрела поступил в точку h, затем в точку g звук поступил через 0,1124 сек., а в точку f через 0,2259 сек., после поступления звука в точку f. Порядок поступления звука в точки приема указывает, что источник звука находится в множестве D. Необходимо определить β, ρ, δ.
Для решения данной задачи составим систему уравнений:
Выразим μ и ρ через ϕ, получим:

Затем выразим α и β через γ, получим:

Вместо δ2 в первые два уравнения подставляем ее значение из третьего уравнения, получим:

Раскрываем скобки и преобразовываем, получим:

Далее

Решаем данную систему уравнений и получаем γ=2962,645; ϕ=2185,864. Проводим дальнейшие вычисления и получаем δ=1999,817 м., β=2999,726 м. Отсюда видно, что расчетные величины отличаются от исходных менее чем на 1 метр, что является достаточным для прицеливания артиллерийских орудий и, следовательно, данный способ можно использовать для прицеливания артиллерийских орудий. Данный метод расчета можно использовать для определения местоположения орудий в множестве А, только тогда сигнал поступит вначале в точку f, затем в точку g, и затем в точку h.
Далее рассмотрим расположение орудия в множестве В (Фиг. 2), точка s. Из точки v проведем перпендикуляр к точке s (место расположения орудия). Все точки f, g, h, v, s расположены в одной плоскости. Для решения задачи (определения местоположения орудия в точке s) рассмотрим три прямоугольных треугольника: fvs, gvs, hvs. Отсюда видно, что все треугольники имеют общий катет vs. Отрезки fg и gh примем одинаковыми и равными, например, 50 метров. Для удобства расчетов примем следующие обозначения отрезков прямых:
При этом (при измерении в метрах):
μ=50-ρ, ϕ=ρ+50.
Вначале примем (при измерении в метрах), что известно, где находится точка s (ρ=15, δ=2000), тогда α=2000.306; γ=2001,056; μ=35; β=2000,056; ϕ=65. Скорость звука примем также равной vзв=330 м/сек. Тогда время прихода звука выстрела для каждого датчика будет равно:

Теперь решим обратную задачу. Известно: датчики звука (микрофоны) находятся в точках f, g, h на прямой, точка v также находятся на этой прямой; μ=50-ρ, ϕ=ρ+50, первым звук от выстрела поступил в точку g, затем в точку f звук поступил через 0,000758 сек., а в точку h через 0,003029 сек., после поступления звука в точку g. Необходимо определить α, μ, δ.
Для решения данной задачи составим систему уравнений:

Выразим μ и ϕ через ρ, получим:

Затем выразим α и γ через β, получим:
Вместо δ2 в первое и в третье уравнения подставляем ее значение из второго уравнения, получим:

Раскрываем скобки и преобразовываем, получим:

Далее

Решаем данную систему уравнений и получаем β=2000,056; ρ=15 м., δ=2000 м,. Отсюда видно, что расчетные величины не отличаются от исходных и следовательно данный способ можно использовать для прицеливания артиллерийских орудий. Данный метод расчета можно использовать для определения местоположения орудий в множестве С, только тогда сигнал поступит первым в точку g, затем в точку h, и затем в точку f.
Теперь рассмотрим расположение орудия на перпендикуляре n (Фиг. 3), точка s. Все точки f, g, h, v, s расположены в одной плоскости. Для решения задачи (определения месторасположения орудия в точке s) рассмотрим три прямоугольных треугольника: fvs, gvs, hvs. Отсюда видно, что все треугольники имеют общий катет vs. Отрезки fg и gh примем одинаковыми и равными, например, 50 метров. Для удобства расчетов примем следующие обозначения размеров (расстояний) отрезков прямых:
При этом (при измерении в метрах):
μ=75, ϕ=25, ρ=25.
Вначале примем (при измерении в метрах), что известно, где находится точка s (δ=3000), тогда α=3000,937; β=3000,104; γ=3000,104. Скорость звука примем также равной vзв=330 м/сек. Тогда время прихода звука выстрела для каждого датчика будет равно:


Теперь решим обратную задачу. Известно: датчики звука (микрофоны) находятся в точках f, g, h на прямой, точка v также находятся на этой прямой; μ=75, ϕ=25, ρ=25, первым звук от выстрела поступил в точки g и h, затем в точку f звук поступил через 0,002525 сек., после поступления звука в точку g. Необходимо определить α, δ.
Для решения данной задачи составим систему уравнений:
Выразим μ, ρ и ϕ через их значения, получим:

Затем выразим α через β, получим:

Так как β=γ, то третье уравнение можно удалить, а вместо δ2 в первое уравнения подставляем ее значение из второго уравнения, получим:
β2-252=(β+330*0,002525)2-752
Раскрываем скобки и преобразовываем, получим:
β2-625=β2+1,6665β+0,6943-5625
Решаем данное уравнение и получаем β м = 2999,8834; δ=2999,7792. Отсюда видно, что расчетные величины отличаются от исходных менее чем на 1 метр, и следовательно данный способ можно использовать для прицеливания артиллерийских орудий. Данный метод расчета можно использовать для определения местоположения орудий на перпендикулярах l, m.
Сделаем следующие выводы:
- Если выстрел произведен из пространства множества А, то вначале звук приходит в точку f, затем в точку g и затем в точку h.
- Если выстрел произведен из пространства перпендикуляра l, то вначале звук приходит одновременно в точки f и g, а затем в точку h.
- Если выстрел произведен из пространства множества В, то вначале звук, приходит в точку g, затем в точку f, а затем в точку h.
- Если выстрел произведен из пространства перпендикуляра, m, то вначале звук приходит одновременно в точки f и h, а затем в точку g.
- Если выстрел произведен из пространства множества С, то вначале звук приходит в точку g, затем в точку h, а затем в точку f.
- Если выстрел произведен из пространства перпендикуляра n, то вначале звук приходит одновременно в точки g и h, а затем в точку f.
- Если выстрел произведен из пространства множества D, то вначале звук приходит в точку h, затем в точку g, и затем в точку f.
По порядку прихода звука выстрела на каждый датчик определяется зона местонахождения орудия, произведшего выстрел, и соответственно этому выбирается необходимый алгоритм вычисления местоположения данного орудия.
Если оценивать строго, то трех датчиков может не хватить, так как алгоритм расчета одинаков для местоположения орудия перед линией fgh или за ней. Поэтому, при необходимости автоматической оценки местоположения орудия перед линией fgh или за ней, дополнительно устанавливается датчик звука (микрофон) перед линией fgh на продолжении перпендикуляра m также на расстоянии около 50 метров. И если звук пришел на этот датчик раньше чем в точку g, то выстрел произведен с тыла (сзади) линии fgh.
Техническое решение данного способа позволяет создать простое, надежное, оперативное устройство для определения местоположения наземных и надводных орудий противника.
Техническая сущность предложенного устройства поясняется чертежами, на которых:
Фиг. 4. Структурная схема устройства.
Фиг. 5. Структурная схема блока временной дискретизации.
Фиг. 6. Структурная схема блока датчиков. Субблок первого канала..
Фиг. 7. Структурная схема блока датчиков. Субблок второго канала..
Фиг. 8. Структурная схема блока датчиков. Субблок третьего канала..
Фиг. 9. Структурная схема блока сигнала проверки.
Фиг. 10. Структурная схема блока фиксации временных рядов.
Фиг. 11. Структурная схема блока коммутации каналов.
Фиг. 12. Структурная схема блока дискретного преобразования Фурье.
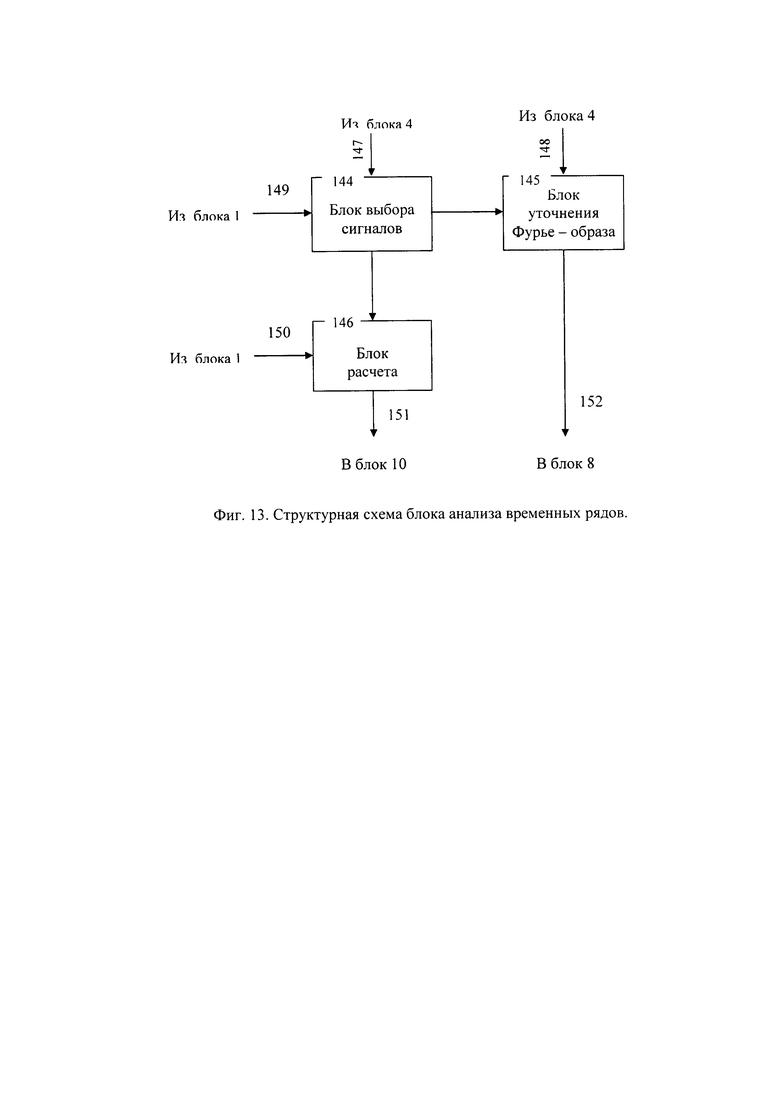
Фиг. 13. Структурная схема блока анализа временных рядов.
Фиг. 14. Структурная схема блока фиксации образа звука.
Фиг. 15. Структурная схема базы образов звука.
Фиг. 16. Структурная схема определителя типа орудия.
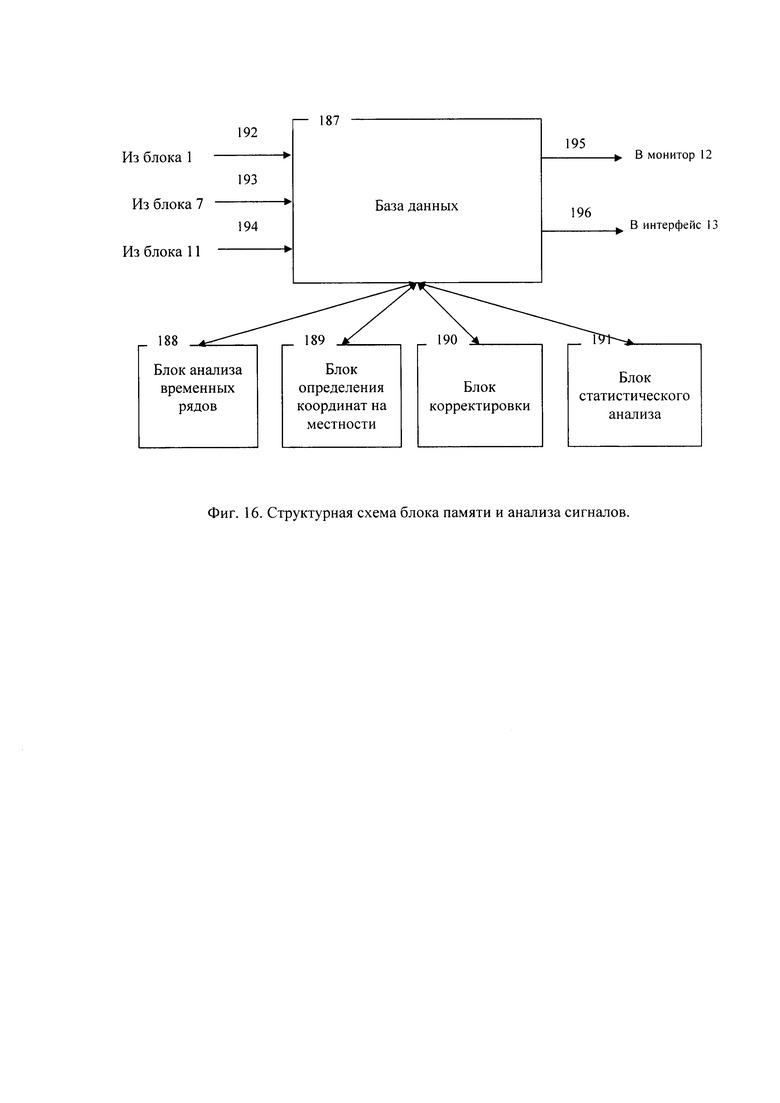
Фиг. 17. Структурная схема блока памяти и анализа сигналов.
При анализе схем необходимо учитывать, что при перекрестном пересечении линии не сливаются и не расходятся, а при Т-образном пересечении линии либо сливаются, либо расходятся.
На фиг. 4 представлена структурная схема устройства.
Устройство для определения местоположения артиллерии противника содержит блок 1 временной дискретизации, блок 2 датчиков, блок 3 сигналов проверки, блок 4 фиксации временных рядов, блок 5 коммутации каналов, блок 6 дискретного преобразования Фурье, блок 7 анализа временных рядов, блок 8 фиксации образа звука, базу 9 образов звука, блок 10 памяти и анализа сигналов, блок 11 определения образа звука, монитор 12, интерфейс 13.
На фиг. 5 представлена структурная схема блока 1 временной дискретизации.
Блок 2 временной дискретизации состоит из: генератора 14, делителя частоты 15. блока 16 формирования сигналов для блока 2, блока 17 запуска устройства, блока 18 формирования сигналов для блока 3, блока 19 формирования сигналов для блока 4. блока 20 формирования сигналов для блока 5, блока 21 формирования сигналов для блока 6, блока 22 формирования сигналов для блока 7, блока 23 формирования сигналов для блока 8, блока 24 формирования сигналов для блока 9, блока 25 формирования сигналов для блока 10, блока 26 формирования сигналов для блока 11. Вход 27 служит для запуска системы в работу и соединен с блоком 2 датчиков. Выход 28 соединен с соответствующими входами блока 2 датчиков, выход 29 соединен с соответствующими входами блока 3 сигналов проверки, выход 30 соединен с соответствующими входами блока 4 фиксации временных рядов, выход 31 соединен с соответствующими входами блока 5 коммутации каналов, выход 32 соединен с соответствующими входами блока 6 дискретного преобразования Фурье, выход 33 соединен с соответствующими входами блока 7 анализа временных рядов, выход 34 соединен с соответствующими входами блока 8 фиксации образа звука, выход 35 соединен с соответствующими входами базы 9 образа звука, выход 36 соединен с соответствующими входами блока 10 памяти и анализа сигналов, выход 37 соединен с соответствующими входами блока 11 определения образа звука.
На фиг. 6 представлена структурная схема блока 2 датчиков. Субблок 1-го канала.
Субблок 1-го канала состоит из: микрофона-1 38, фильтра-1 39, низких частот соответствующего диапазона, который удаляет составляющие, образованные источниками дефектов, усилителя-ограничителя-1 40, которые наряду с усилением сигнала осуществляют его ограничение без искажения форм кривых, аналогово-цифровых преобразователей (АЦП) АЦП-1 41, АЦП-2 46. оперативных запоминающих устройств (ОЗУ) ОЗУ-1 42, ОЗУ-2 44, ОЗУ-3 47, ОЗУ-4 49, переключателя-1 43, переключателя-2 48 и блока 45 запуска-1. Усилитель-ограничитель может быть любой (операционный или на транзисторах). Нормированный (фиксированный определенного уровня) сигнал подается в аналогово-цифровой преобразователь (АЦП). Все оцифрованные сигналы хранятся в ОЗУ. Входы 50, 53 служат для управления АЦП, а входы 51, 54 служат для управления ОЗУ, вход 52 служит для управления переключателем. Выходы 53, 57, 59, 60 соединены с входами блока 5 коммутации каналов.
Структурные схемы субблоков 2-го и 3-его каналов аналогичны и представлены на фиг. 7 и на фиг. 8. В них изменены лишь нумерация элементов схем и их цифровые обозначения.
На фиг. 9 представлена структурная схема блока 3 сигналов проверки.
Блок 3 сигналов проверки состоит из: регистра 107 вида шума (звука выстрела), блока 108 управления, блок 109 вида и уровня шума, генератора 110 звука выстрела. Вход111 соединен с выходом интерфейса 13 и служит для записи в регистр 107 звуков различных типов орудий. Вход 112 соединен с выходом блока 1.
На фиг. 10 представлена структурная схема блока 4 фиксации временных рядов.
Блок 4 фиксации временных рядов состоит из: фиксатора 113 канала, фиксатора 114 уровня, фиксатора 115 Фурье-образа, фиксатора 116 начала и длительности сигнала, блока 117 сортировки и хранения параметров сигнала. Входы 118, 120, 122, 124 служат для управления фиксаторами и соединены с выходом блока 1, а входы 119, 123, 125 для передачи данных с блока 5 коммутации каналов. Вход 121 служит для передачи Фурье-образа из блока 6 дискретного преобразования Фурье. Выход 126 служит для передачи необходимых данных в блок 7 анализа временных рядов.
На фиг. 11 представлена структурная схема блока 5 коммутации каналов.
Блок 11 коммутации каналов измерения состоит из мультиплексора 127 уровня звука и мультиплексора 128 звука выстрела. На вход 130 поступают сигналы управления из блока 1 временной дискретизации, а на входы 129, 131 поступают сигналы из блока 2 датчиков. Выходы 132, 133 соединены с входами блока 4 фиксации временных рядов, а выход 134 соединены с входами блока 6 дискретного преобразования Фурье.
Ha фиг. 12 представлена структурная схема блока 6 дискретного преобразования Фурье.
Блок 6 дискретного преобразования Фурье состоит из: регистра-1 135; преобразователя 136 Фурье, который может использоваться серийного изготовления с выходами не менее чем для 11-ой гармоники; регистра-2 137. Регистр-1 135 служит для хранения входных сигналов, поступающих на его вход 138 от блока 5 коммутации каналов, а регистр-2 137 служит для хранения выходных сигналов. На входы 139, 140, 141 поступают сигналы управления от блока 1 временной дискретизации. Сигналы от регистра-2 со значениями полученных амплитуд гармоник с выхода 142 поступают в блок 4 фиксации временных рядов, а с выхода 143 сигналы поступают в блок 8 фиксации образа звука.
На фиг. 13 представлена структурная схема блока 7 анализа временных рядов..
Блок 7 анализа временных рядов состоит из блока 144 выбора сигналов, блока 145 уточнения Фурье-образа, блока 146 расчета. Входы 149, 150 соединены с выходами блока 1 и служат для управления и синхронизации, а входы 147, 148 соединены с входами блока 4 и служат для приема предварительных данных для обработки. Выход 151 соединен с входом блока 10, а выход 152 соединен с входом блока 8.
На фиг. 14 представлена структурная схема блока 8 фиксации образа звука.
Блок 8 фиксации образа звука состоит из регистра-3 153 Фурье-образа, регистра-4 154 Фурье-образа. Вход 155 соединен с выходом блока 7, а вход 156 соединен с выходом блока 6 и служат для приема Фурье-образов. Входы 157, 158 соединены с выходами блока 1 и служат для управления и синхронизации. Выход 159 соединен с входами блока 11, а выход 160 соединен также с входами блока 11.
На фиг. 15 представлена структурная схема базы 9 образов звука.
База 9 образов звука состоит из: блока 161 ввода новых значений амплитуд гармоник известного образа звуков выстрела (при режиме корректировки данных); блока 162 ввода новых значений амплитуд гармоник известного образа звука выстрела (при режиме загрузки данных); блока 163 запуска необходимой выборки данных из базы 164 данных, которая в свою очередь состоит из базы 165 данных верхних значений амплитуд гармоник для доверительного интервала с надежностью 0,99 (множество B1); базы 166 данных нижних значений амплитуд гармоник для доверительного интервала с надежностью 0,99 (множество В2); база 167 данных верхних значений амплитуды гармоник для доверительного интервала с надежностью 0,95 (множество C1); базы 168 данных нижних значений амплитуды гармоник для доверительного интервала с надежностью 0,95 (множество С2); базы 169 данных верхних значений амплитуды гармоник для доверительного интервала с надежностью 0,9 (множество D1); базы 170 данных нижних значений амплитуды гармоник доверительного интервала с надежностью 0,9 (множество D2); блока 171 вывода данных для анализа; входами 172, 173 из интерфейса 13, входом 174 из блока 1, входами 175, 176, 177, 178, 179, 180 соединенными с выходами блока 11 определения образа звука и выходами 181, 182, 183, 184, 185, 186, соединенными с входами блока 11 определения образа звука.
На фиг. 16 представлена структурная схема блока 10 памяти и анализа сигналов.
Блок 10 памяти и анализа сигналов состоит из: базы 187 данных; блока 188 анализа временных рядов; блока 189 определения координат на местности, блока 190 корректировки, блока 191 статистического анализа. Вход 192 соединен с выходом блока 1 временной дискретизации, вход 193 соединен с выходом блока 7 анализа временных рядов, вход 194 соединен с выходом блока 11 определения образа звука. Выход 195 соединен с входом монитора 12, а выход 196 соединен с входом интерфейса 13.
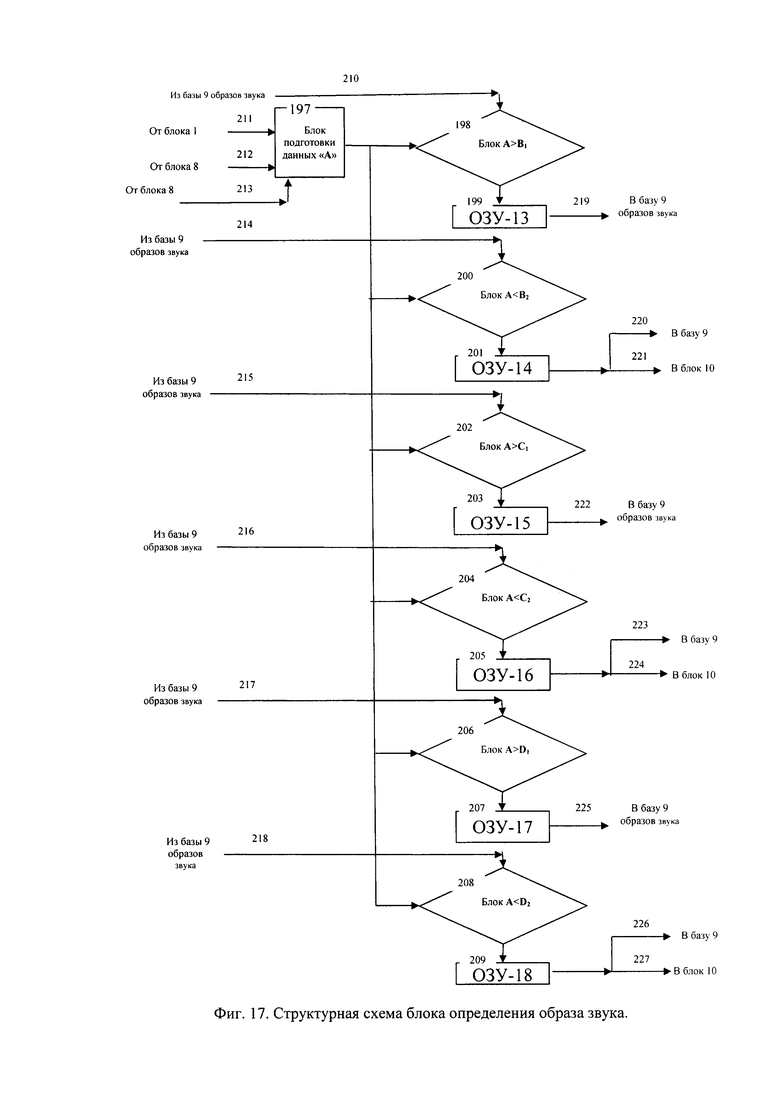
На фиг. 17 представлена структурная схема блока 11 определения образа звука.
Блок 11 определения образа звука состоит из: блока 197 подготовки данных, который служит для подготовки массива данных множества А к сравнению с массивами данных множеств В, С, D базы 9 образов звука; блоков 198, 200, 202, 204, 206, 208 сравнения; оперативных запоминающих устройств (ОЗУ) ОЗУ-13 199, ОЗУ-14 201, ОЗУ-15 203, ОЗУ-16 205, ОЗУ-17 207, ОЗУ-18 209; входом 210 от базы 9 образов звука; входом 211 от блока 1 временной дискретизации; входом 212 от блока 8 фиксации образа звука: входом 213 также от блока 8; входами 214, 215, 216, 217, 218 от базы 9 образов звука; выходами 219, 220, 222, 223, 225, 226 в базу 9 образов звука и выходами 221, 224, 227 в блок 10 памяти и анализа сигналов.
Сущность изобретения, как технического решения, выражается в совокупности существенных признаков, достаточной для достижения обеспечиваемого изобретением, технического результата.
Поставленная задача решается следующим образом. Вначале устройство находится в режиме ожидания. При появлении сигнала звука выстрела (предположительно) устройство начинает свою работу. Запуск производится по первому сигналу от любого субблока блока датчиков. С этого момента происходит оцифровка сигналов полученных от микрофонов по всем каналам и их запись в ОЗУ-1 42, в ОЗУ-5 65, в ОЗУ-9 88 в течение 2-5 сек. Аналогично происходит оцифровка и запись сигналов уровня звука в ОЗУ-3 47, в ОЗУ-7 70, в ОЗУ-11 93. После записи данных в ОЗУ (в течение 2-5 сек.) происходит их дальнейшая обработка и анализ, а следующая запись данных будет осуществляться в ОЗУ-2 44, в ОЗУ-6 67, в ОЗУ-10 90, а сигналов уровня звука в ОЗУ-4 49, ОЗУ-8 72, ОЗУ-12 95. После коммутатора каналов в блоке фиксации временных рядов по каждому каналу фиксируется вначале свой временной ряд, в котором фиксируется по каждому сигналу: номер канала; время начала сигнала (время астрономическое, с точностью 1 мксек.); уровень сигнала; длительность сигнала. Затем, после обработки сигнала в преобразователе Фурье, к данной фиксации добавляется Фурье-образ.
Блок 3 сигнала проверки служит для проверки работоспособности всех блоков устройства и уточнения скорости звука, за счет измерения отклонения рассчитанных координат местоположения данного блока от его реальных координат местоположения.
В блоке 7 анализа временных рядов выявляется порядок прихода сигнала на каждый канал, определяется укрупнено местоположение источника звука и выбирается необходимый алгоритм расчета местоположения орудия произведшего выстрел. Также фиксируется первый по времени сигнал и два других должны быть в диапазоне от 0 до 350 мсек. Если этого нет, то это сбой программы. Все три сигнала проверяются на однообразие Фурье-образов. Если Фурье-образы идентичны с заданной точностью (амплитуды в Неперах или дециБелах относительно первой гармоники), то производится расчет расстояния и синуса угла до источника выстрела. В блоке 7 так же усредняются значения амплитуд, и в блок 8 фиксации образа звука подается усредненное значение Фурье-образа, где по нему и будет определяться тип орудия, путем сравнения с Фурье-образами звуков выстрела разных типов орудий, хранящихся в базе 9 образов звука. Тип орудия и будет зафиксирован с определенной надежностью достоверности в блоке 11 определения образа звука. В блоке 10 памяти и анализа сигналов хранятся результаты всех расчетов, рассчитываются и определяются координаты на местности зафиксированных орудий, производится корректировка результатов, за счет уточнения скорости звука и рельефа местности.
Блок 1 временной дискретизации (фиг. 5) служит для синхронизации работы блоков устройства при принятом временном разделении каналов. Частота дискретизации выбирается в делителе частоты 18; фазы и длительности сигналов для управления различных блоков формируются в блоках 16, 18, 19, 20, 21, 22, 23, 24. 25, 26 формирования сигналов. Вход 27 от блока 2 (выходы 58, 81, 104) служит для запуска записи и анализа сигналов. Выход 28 соединен с входами 50, 51, 52, 53, 54, 55, 73, 74, 75, 76, 77, 78, 96, 97, 98, 99, 100, 101 блока 2 датчиков и служит для управления переключателями, АЦП и ОЗУ данного блока в процессе оцифровки принимаемых сигналов звука выстрела. Выход 29 соединен с входом 112 блока 3 сигнала проверки и служит для запуска сигнала проверки. Выход 30 соединен с входами 118, 120, 122, 124 блока 4 фиксации временных рядов и служит для управления процессами данного блока. Выход 31 соединен со входом 130 блока 5 коммутации каналов и служит для управления мультиплексорами 129, 131. Выход 32 соединен с входами 139, 140, 141 блока 6 дискретного преобразования Фурье и служит для управления регистром-1 135, преобразователем 136 Фурье и регистром-2 137. Выход 33 соединен с входами 149, 150 блока 7 анализа временных рядов и служит для выбора необходимых сигналов из блока 4 и выполнения необходимых расчетов. Выход 34 соединен с соответствующими входами 157, 15.8 блока 8 фиксации образов звука и служит для записи данных в регистр-3 153 и! регистр-4 154. Выход 35 служит для управления процессами базы 9 образов звука и соединен с входом 174.. Выход 36 соединен с входом 192 блока 10 памяти и анализа сигналов и служит для управления процессами данного блока. Выход 37 соединен с входом 211 блока 11 определения образа звука и служит для управления процессами данного блока.
Блок 2 датчиков (фиг. 6, 7, 8) обеспечивает следующие функции для каждого измерительного канала:
- прием звуковых сигналов,
- частотная фильтрация по входу,
- усиление сигнала до определенного (наперед заданного) нормированного; уровня без искажения формы сигнала,
- преобразование аналогового сигнала в дискретный (оцифровка сигнала), запись оцифрованного сигнала в ОЗУ.
Прием звуковых сигналов осуществляется микрофоном-1 38, микрофоном-2 61, микрофоном-3 84. Частотная фильтрация по каждому каналу осуществляется фильтром-1 39, фильтром-2 62, фильтром-3 85. Усилитель-ограничитель-1 40, усилитель-ограничитель-2 63, усилитель-ограничитель-3 86 обеспечивают усиление сигналов до необходимого уровня по каждому каналу без искажения форм кривых и далее сигналы звука подаются на входы АЦП-1 41, АЦП-3 64, АЦП-5 87, а сигналы уровня звука подаются на входы АЦП-2 46, АЦП-4 69, АЦП-6 92. Все АЦП управляются сигналами с блока 1 временной дискретизации по входам 50, 53, 73, 76, 96, 99. Выходные сигналы из АЦП-1 41 поступают на вход переключателя-1 43 и далее на вход ОЗУ-1 42 либо на вход ОЗУ-2 44. Переключател-1 43 служит для переключения записи с ОЗУ-1 42 на ОЗУ-2 44 в случае, если серия сигналов звука превысит 3-5 сек. В случае если вторая серия звуков продлится более 3-5 сек., переключатель-1 опять переключит запись на ОЗУ-1. Аналогично работают все переключатели и управляются сигналами с блока 1 временной, дискретизации по входам 52, 55, 75, 78, 98, 101. Все ОЗУ управляются сигналами с блока 1 временной дискретизации по входам 51, 54, 74, 77, 97, 100. С выходов 56, 57, 59, 60, 79, 80, 82, 83, 102, 103, 105, 106 сигналы поступают в блок 5 коммутации каналов на входы 129, 131.
Блок 3 сигнала проверки (Фиг. 9) служит для генерации звука выстрела с фиксированного месторасположения, и это позволяет проверять работоспособность устройства и получить необходимые данные для корректировки, в случае изменения скорости звука. По команде с блока 1 временной дискретизации через вход 112 запускается блок 108 управления, который выбирает вид и уровень звука выстрела в блоке 109 и затем включается генератор 110 звука выстрела. Виды звука выстрела (по типам орудий) записываются в регистр 107 вида шума через вход 111 из интерфейса 13.
Блок 4 фиксации временных рядов (Фиг. 10) служит для предварительного анализа сигналов временного ряда каждого канала с последующим их перезаписыванием в единый временной ряд. Фиксатор 113 канала фиксирует с какого канала в данный момент идет обработка сигналов, поступающих на входы 119, 123, 125 из блока 5 коммутации каналов. Фиксатор 114 уровня определяет уровень всех сигналов и предварительно определяет расстояние до источника сигнала. Фиксатор 115 Фурье-образа регистрирует по каждому сигналу его Фурье-образ, поступающий из блока 6 дискретного преобразования Фурье по входу 124. Фиксатор 116 начала и длительности сигнала фиксирует астрономическое время начала сигнала и его длительность. Блок 117 сортировки и хранения сигнала служит для создания единого временного ряда (3-5 сек) сигналов поступивших по всем каналам, где по каждому каналу записывается следующая информация: номер канала (номер микрофона), время начала сигнала и его длительность, уровень звука сигнала, Фурье-образ сигнала. Управляется блок 4 по командам с блока 1 временной дискретизации через входы 118, 120, 122, 124.
Блок 5 коммутации каналов (Фиг. 11) служит для выбора в определенный момент одного из трех необходимых каналов исследования, сигналы которого передаются в блок 6 дискретного преобразования Фурье через выход, 134, и в блок 4 фиксации временных рядов через выходы 132, 133. Выбор канала осуществляется мультиплексорами 127, 128, которые управляются через вход 130 сигналами блока 1 временной дискретизации.
Блок 6 дискретного преобразования Фурье (Фиг. 12) служит для преобразования сигналов каждого канала в Фурье-образ (амплитуды, частоты и фазы каждой гармоники). Преобразование Фурье, как правило, достаточно вести до 11-ой гармоники. Сигналы каждого канала в оцифрованном виде в необходимый момент времени поступают по входу 138 в регистр-1 135 и далее в преобразователь 136 Фурье. На выходах преобразователя Фурье, после преобразования, присутствуют значения амплитуды, частоты и фазы каждой гармоники, которые заносятся в регистр-2 137. Значения; амплитуд, частот, фаз гармоник через выход 142 передаются в блок 4 фиксации временных рядов и через выход 143 в блок 8 фиксации образа звука.
Блок 7 анализа временных рядов (Фиг. 13) служит для исследования серий звуковых сигналов (в диапазоне 300-350 мсек.) на идентичность Фурье-образов и произведения необходимых расчетов по определению местоположения орудий, произведших выстрел. Блок 144 выбора сигналов осуществляет необходимую выборку трех сигналов, проверяет их на идентичность Фурье-образов и в случае положительного результата передает эти данные в блок 145 уточнения Фурье-образа и в блок 146 расчета. В блок 144 данные о сигналах поступают по входу 147 из блока 4. В блоке 145 вычисляется среднее значение Фурье-образа и через выход 152 эти данные передаются в блок 8 фиксации образа звука. В блоке 146 расчета вначале определяется, в каком множестве или на каком перпендикуляре находится орудие, произведшее выстрел, а затем по соответствующему алгоритму рассчитывается его точное местоположение. Результаты расчета через выход 151 передаются в блок 10 памяти и анализа сигналов.
Блок 8 фиксации образа звука (Фиг. 14) служит для фиксации среднего значения Фурье-образа в регистре-3 153 и текущих значений Фурье-образов в регистр-4 154 из рассматриваемой серии. В регистр-3 153 данные поступают из блока 7 по входу 155, а в регистр-4 154 из блока 6 по входу 156. Управляется блок 8 по командам с блока 1 временной дискретизации через входы 157, 158. Данные с регистра-3 153 передаются по необходимости в блок 11 определения образа звука через выход 159, а с регистра-4 также в блок 11 через выход 160.
База 9 образов звука (Фиг. 15) хранит информацию в виде Фурье-образов звука выстрела по каждому типу орудий в доверительных интервалах по различным уровням оценки (в нашем примере их 3: 0,9; 0,95; 0,99). Образ выстрела включает в себя амплитуды, частоты и фазы гармоник исследуемого звука выстрела. От интерфейса 13 через вход 172 записываются данные образов блоком 161 ввода новых значений образов при режиме корректировки данных, также от интерфейса 13 через вход 173 записываются данные образов блоком 162 ввода новых значений образов при режиме загрузки данных. Через вход 174 происходит управление процессом поиска, выборки и определения образа выстрела блоком 163 запуска необходимой выборки данных с помощью блока 1 временной дискретизации. Входы 175, 176, 177, 178, 179, 180 от блока 11 и выходы 181, 182, 183, 184, 185, 186 в блок 11 участвуют в процессе выборки данных.
Блок 10 памяти и анализа сигналов (Фиг. 16) служит:
- для хранения всех данных о работе устройства в базе 187 данных,
- для дополнительного исследования временных рядов в блоке 188 анализа временных рядов,
- для определения координат орудий на местности с учетом топографии (рельефа местности) в блоке 189 определения координат на местности,
- для корректировки расчетов по уточненным значениям скорости звука в блоке 190 корректировки,
- для статистического анализа результатов расчетов в блоке 191 статистического анализа.
Управляется блок 10 по командам с блока 1 временной дискретизации через вход 192. Основные данные поступают от блока 7 анализа временных рядов через вход 193 и от блока 11 определения образа звука через вход 194. Данные с блока 10 поступают в монитор 12 через выход 195 и в интерфейс 13 через выход 196.
Блок 11 определения образа звука определяет образ звука выстрела (тип орудия) путем сравнения сигнала звука выстрела (блок 8 фиксации образа звука) с данными, хранившимися в базе 9 образов звука. Сигнал об образе звука выстрела содержит в цифровом коде амплитуды гармоник сигнала после дискретного преобразования Фурье в виде матрицы (массив А). Вначале массив А сигнала о образе звука выстрела сверяется с массивом B1 на предмет выделения из базы данных 165 (массив B1) образы, все амплитуды гармоник которых меньше значений амплитуд гармоник массива А. Все эти состояния записываются в ОЗУ-13 199. Далее в соответствии с записями в ОЗУ-13 199 из базы данных 166 (массив В2) выбираются данные верхних значений амплитуд гармоник, которые поступают на вход 214 схемы сравнения 200, где отбираются состояния, амплитуды гармоник которых (Массив В2) больше амплитуд гармоник массива А. Данные, выбранных образов (Массив В2) сохраняются в ОЗУ-14 201. Это будет образ звука выстрела, который с достоверностью 0,99 можно считать истинным образом звука выстрела найденного типа орудия. Код данного образа соответственно передается: через выход 220 в базу 9 образов звука и через выход 221 в блок 10 памяти и анализа сигналов. Если же образ звука выстрела с достоверностью 0,99 не будет определен, то массив А сверяется с массивами С1, С2 аналогично ранее сказанному для массивов B1, В2. Если код будет определен, то это будет образ звука выстрела, который с достоверностью 0,95 можно считать истинным образом звука выстрела определенного орудия. Код данного образа соответственно передается: через выход 223 в базу 9 образов звука, и через выход 224 в блок 10 памяти и анализа сигналов. Если же образ с достоверностью 0,95 не будет определен, то массив А сверяется с массивами D1, D2 аналогично ранее сказанному для массивов B1, В2. Если код будет определен, то это будет образ, который с достоверностью 0,9 можно считать истинным образом звука выстрела. Код данного образа соответственно передается: через выход 226 в базу 9 образов звука и через выход 227 в блок 10 памяти и анализа сигналов. Блок 197 подготовки данных «А» служит для подготовки массива А к операциям сравнения, а также и управляет операциями сравнения. В блоке 197 еще и содержатся данные фазы и частоты каждой гармоники массива А, которые при определении истинного образа звука выстрела предаются в блок 10 памяти и анализа сигналов.
Рассмотрим работу устройства с учетом работы трех датчиков звука (микрофонов), расположенных на прямой линии fgh в точках f, g, h; блок 3 сигнала проверки расположен в множестве D, на расстоянии 100 метров от точки g; АЦП примем 14-ти разрядные, а преобразователь Фурье разлагает сигнал на 6 гармоник (1-ую, 3-ью, 5-ую, 7-ую, 9-ую, 11-ую).
Рассчитаем минимально допустимый период времени фиксации звука выстрела. Максимальное время, за которое звук проходит 100 метров равна 0,3 сек.. Для надежности примем допустимый период времени фиксации звука выстрела равен не более 0,35 сек. Время записи сигналов в первые ОЗУ (ОЗУ-1 42, ОЗУ-3 47, ОЗУ-5 65, ОЗУ-7 70, ОЗУ-9 88, ОЗУ-11 93) примем равное 3 сек., что достаточно для записи 9 выстрелов, если необходимо разведать цели ведущие огонь «на ходу», время записи необходимо сократить до 1 сек. Через 3 сек. переключатели (43, 48, 66, 71, 89, 94) переключают запись во вторые ОЗУ (ОЗУ-2 44, ОЗУ-4 49, ОЗУ-6 67, ОЗУ-88 72, ОЗУ-10 90, ОЗУ-12 95). В то же время, при отсутствии сигналов звука выстрела более 1 сек., запись прекращается.
Период преобразования сигналов в АЦП должен быть не более 1 мксек., что необходимо для обеспечения необходимой точности измерения. С учетом вышеизложенного, частоту преобразования в АЦП примем равную 20 мГц. Базовую частоту работы всего устройства также примем равную 20 мГц. Емкость одного ОЗУ в блоке 2 датчиков должна быть не менее 6 мегабайт, так как для записи одного преобразования необходимо 2 байта (14-ти разрядные АЦП) и в 1 сек. необходимо записать 1 миллион преобразований. С учетом принятой базовой частоты работы устройства, время, необходимое для обработки всех сигналов записанных в течение 3 сек., будет не более 1 сек.
После развертывании устройства, а также ежедневно или по необходимости, производится «контрольный выстрел» блоком 3 сигнала проверки. Причем «контрольный выстрел» производится тем типом орудия, место нахождения которого необходимо разведать. Уровень звука выстрела выставляется соизмеримым с уровнем звука выстрела принимаемого от разведываемого орудия. По результатам обработки «контрольного выстрела» подтверждается (или не подтверждается) работоспособность устройства и выявляется точное значение скорости звука в настоящий момент для корректировки и уточняется соответствующий вектор корректировки.
Предположим, что в течение 3 сек. три разных разведываемых орудия произвели три выстрела из разных мест. Информация и данные этих выстрелов записалась в первые, ОЗУ (ОЗУ-1 42, ОЗУ-3 47, ОЗУ-5 65, ОЗУ-7 70, ОЗУ-9 88, ОЗУ-11 93), после чего запись переключилась на вторые ОЗУ (ОЗУ-2 44, ОЗУ-4 49, ОЗУ-6 67, ОЗУ-88 72, ОЗУ-10 90, ОЗУ-12 95) и длилась 1 сек. (выстрелов не было). После завершения записи в первые ОЗУ (ОЗУ-1 42, ОЗУ-3 47, ОЗУ-5 65, ОЗУ-7 70, ОЗУ-9 88, ОЗУ-11 93) они переводятся в режим считывания и подключаются к блоку 5 коммутации каналов, который подключает их одновременно к блоку 4 фиксации временных рядов и к блоку 6 дискретного преобразования Фурье.
В блоке 4 фиксации временных рядов производится предварительная обработка сигналов выстрелов, и все данные передаются затем в блок 7 анализа временных рядов.
В блоке 6 дискретного преобразования Фурье происходят необходимые преобразования с целью получения Фурье-образов сигналов выстрела по всем каналам. Данные Фурье-образов передаются в блок 4 и в блок 8 фиксации образа звука.
В блоке 7 анализа временных рядов производится вычисление точного местоположения орудий произведших три выстрела, и для определения типа орудий три усредненных Фурье-образа передаются в блок 8. Данные анализа временных рядов также передаются в блок 10 памяти и анализа сигналов.
После завершения работы блока 7 анализа временных рядов начинает работу блок 11 определения образа звука совместно с блоком 8 фиксации образа звука и базой 9 образов звука по определению типа орудий. По завершению операций определения типа орудий все данные передаются в блок 10 памяти и анализа сигналов.
В блоке 10 памяти и анализа сигналов проводится необходимая работа по корректировке расчетов и определению координат орудий произведших выстрел, а также проводится статистический анализ оперативной обстановки. Результаты передаются на монитор 12 и в вышестоящие пункты управления через интерфейс 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ СОСТОЯНИЯ МЕХАНИЗМОВ И СИСТЕМ | 2015 |
|
RU2608202C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЗМОВ ТРАНСПОРТНЫХ И СТАЦИОНАРНЫХ СИСТЕМ | 2013 |
|
RU2545250C2 |
| УСТРОЙСТВО ДЛЯ КАРДИОГРАФИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ ПАЦИЕНТОВ | 2015 |
|
RU2615721C2 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| СПОСОБ ДИСТАНЦИОННОГО ПОРАЖЕНИЯ ПРОТИВНИКА | 2006 |
|
RU2326328C2 |
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОННЫЙ ВЗРЫВАТЕЛЬ ДЛЯ МЕЛКОКАЛИБЕРНЫХ БОЕПРИПАСОВ | 2019 |
|
RU2767827C2 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| АКУСТИЧЕСКИЙ ЛОКАТОР ИМПУЛЬСНЫХ ИСТОЧНИКОВ ЗВУКА | 2013 |
|
RU2529827C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА ПРИ РАЗМЕЩЕНИИ АКУСТИЧЕСКОЙ АНТЕННЫ АКУСТИЧЕСКОГО ЛОКАТОРА НА НАКЛОННЫХ ПЛОЩАДКАХ ПОВЕРХНОСТИ ЗЕМЛИ | 2014 |
|
RU2549919C1 |
| Способ создания ретранслированных помех | 2018 |
|
RU2696002C1 |










Изобретение относится к области способов и устройств акустической пассивной локации и может быть использовано в системах управления огнем артиллерии. Изобретение относится к методам и средствам прицеливания и наводки. Определение местоположения наземной и надводной артиллерии противника осуществляется путем точной регистрации времени прихода звука выстрела на каждый датчик звука (микрофон), которых должно быть не менее трех. По известной скорости звука, расстояниям между датчиками и их месторасположениям вычисляется местоположение артиллерии противника. Устройство для определения местоположения артиллерии противника относится к области артиллерийской разведки и предназначено для фиксации местоположения каждого орудия противника, произведшего выстрел. Предлагаемое устройство осуществляет измерение и оцифровывание сигналов с датчиков звука и затем преобразовывает их в Фурье-образы (амплитуды, фазы и частоты гармоник сигнала). Фурье-образы звука выстрела сравниваются с базовыми Фурье-образами звука выстрела известных типов орудий, с различными уровнями достоверности оценки. По выявленному базовому Фурье-образу и определяется тип орудия, произведшего выстрел, с соответствующей достоверностью оценки. В устройстве также вычисляется точное местоположение данного орудия противника и проводятся необходимые статистические исследования. Предлагаемое устройство может использоваться также для определения местоположения снайперов противника и подводных целей. 2 н.п. ф-лы, 17 ил.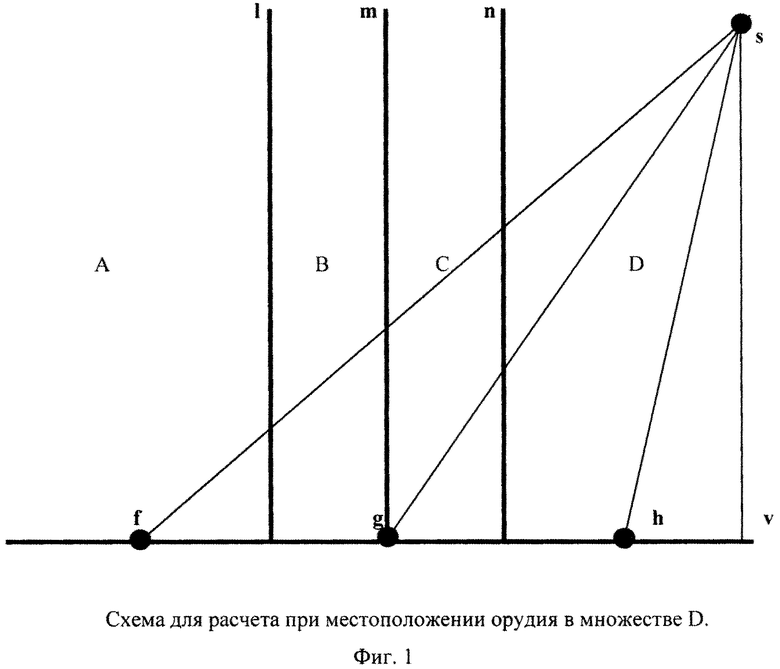
1. Способ определения местоположения наземной и надводной артиллерии противника, заключающийся в том, что
определение местоположения артиллерии противника осуществляется путем точной регистрации времени прихода звука выстрела на каждый датчик звука (микрофон), датчиков звука должно быть не менее трех и они должны быть расположены друг от друга на необходимом расстоянии (для удобства вычислений датчики целесообразно располагать на горизонтальной прямой с расстояниями между ними порядка 50 м);
по известной скорости звука, расстояниям между датчиками и их месторасположениям вычисляется местоположение артиллерии противника следующим образом: вначале производится проверка работоспособности всех блоков устройства и уточняется скорость звука за счет измерения отклонения рассчитанных координат местоположения каждого блока от реальных координат, затем устройство переходит в режим ожидания, при появлении сигнала звука выстрела от первого сигнала от любого из блоков датчиков производится оцифровка сигналов, полученных от всех микрофонов, и их запись, анализ и дальнейшая обработка в преобразователе Фурье для получения Фурье-образов, при этом если все три сигнала идентичны с заданной точностью, то производится расчет расстояния и угол направления (например, азимут) до источника выстрела, определяется тип орудия по усредненному значению Фурье-образа путем сравнения с хранящимися в базе образами звуков, корректируются результаты за счет уточнения скорости звука и рельефа местности, сохраняются результаты в блоке памяти.
2. Устройство для определения местоположения наземной и надводной артиллерии противника, содержащее блок временной дискретизации, монитор, интерфейс, блок датчиков, включающий по меньшей мере три датчика звука, расположенных друг от друга на необходимом расстоянии (для удобства вычислений датчики целесообразно располагать на горизонтальной прямой с расстояниями между ними порядка 50 м), отличающееся тем, что в устройство добавлены блок сигнала проверки, служащий для проверки работоспособности устройства и уточнения скорости звука путем генерации звука выстрела, блок фиксации временных рядов, который служит для предварительного анализа сигналов временного ряда каждого канала с последующим их перезаписыванием в единый временной ряд, блок коммутации каналов, который служит для выбора в определенный момент одного из трех необходимых каналов исследования, блок дискретного преобразования Фурье, где сигналы преобразуются в Фурье-образы, блок анализа временных рядов, где выделяются сигналы, принадлежащие одному выстрелу, и производятся необходимые вычисления по определению местоположения орудия, производившего этот выстрел, блок фиксации образа звука, в котором уточняется Фурье-образ звука выстрела, базу образов звука, содержащую Фурье-образы звуков выстрелов различных орудий, блок памяти и анализа сигналов, содержащий всю информацию о работе устройства, выполняющий необходимую корректировку расчетов, например, в зависимости от изменения скорости звука, определяющий координаты на местности местоположения орудия, производившего выстрел, и производящий необходимые расчеты статистического анализа, блок определения образа звука, где определяется тип орудия производившего выстрел.
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| RU 2013157503 A, 20.07.2015 | |||
| WO 2004027444 A2, 01.04.2004 | |||
| US 20090262604 A1, 22.10.2009 | |||
| WO 2013088281 A1, 20.06.2013. | |||

