Изобретение относится к акустическим пеленгаторам (базным пунктам автоматизированных звукометрических комплексов) и может быть использовано для определения удаления источника звука (ИЗ), (источника акустического сигнала (АС)) от пеленгатора и топографических координат этого ИЗ.
В современной звукометрии имеются разные способы определения пеленгов (углов между известным направлением, например РСН, и направлением: точка пересечения ЛГ (акустический пеленгатор) - источник АС [1...4], но они не позволяют определять дальность до ИЗ. В работах [5...8] описаны способы определения пеленгов (звукометрических углов) на источник АС, дальности до него и определения топографических координат этих источников АС с использованием 2 (3) акустических пеленгаторов, разнесенных на некоторое расстояние друг от друга (геометрическую базу), и топографические координаты которых известны. Дальность до ИЗ от одного из пеленгаторов рассчитывается на основе соотношений в косоугольном треугольнике, а затем вычисляются топографические координаты этого ИЗ. Недостатками этого способа являются низкая помехозащищенность (АС и помехи принимаются из большого сектора, примерно равного 120°), низкая пропускная способность (3...5 целей в минуту), невозможность пеленгования источников непрерывных АС (в нем используется фазовый способ определения пеленгов, «принцип разности времен»). В [9 с.17-19] описан способ определения пеленгов источников АС, лишенный вышеназванных недостатков, но и он не позволяет определять дальности до ИЗ и топографические координаты этих источников.
Наиболее близким техническим решением к заявленному способу является способ определения дальности до ИЗ, используемый в акустическом пеленгаторе [10], использующем равносигнальный способ определения пеленгов ИС с разностной обработкой сигнала, который возьмем в качестве прототипа.
В нем эта дальность определяется путем решения следующего трансцендентного уравнения:
 [10, с.12]
[10, с.12]
где D - удаление ИЗ от пеленгатора (дальность до ИЗ);
β1, β2, β3 - коэффициенты затухания звука на частотах f, 2f, 3f соответственно в неп/м;
Р1, Р2, Р3 - амплитуды звуковых давлений АС на входе пеленгатора на вышеуказанных частотах, которые пропорциональны соответствующим амплитудам напряжений, принимаемых АС и измеряемых на выходах соответствующих каналов обработки сигнала (КОС).
Как видно из этого аналитического выражения (АВ), недостатками способа, используемого в прототипе, являются следующие:
1. Измерение вышеуказанной дальности можно производить лишь в однородной среде с постоянными параметрами, что можно отнести, например, к водной среде;
2. Не учитываются параметры приземного слоя атмосферы (температура, относительная влажность, коэффициенты теплопроводности, адиабаты,), что снижает точность измерения дальности до ИЗ;
3. Не учитывается влияние отражения от поверхности земли и ослабление звука лесными массивами, лесополосами, что также будет снижать точность измерения этой дальности;
4. Измерение амплитуд напряжений на выходах каналов обработки сигналов (КОС) производится на трех гармониках акустического спектра сигнала, рассматриваемая дальность не определяется сразу, а ее можно найти лишь методом последовательных приближений (каким можно решить трансцендентное уравнение), что увеличивает время обработки этого сигнала;
5. Не обеспечивается определение местоположения ИЗ.
Задачами изобретения являются измерение удалений ИЗ (находящихся на поверхности земли, воды, над этими поверхностями) от акустических пеленгаторов; сокращение времени измерений и определение местоположения ИЗ.
Техническим результатом, достигаемым в результате решения поставленной задачи, является уменьшение систематических и случайных ошибок измерения этой дальности; расширения круга решаемых задач пеленгаторами и повышение их пропускной способности.
Для достижения указанного технического результата в способе определения дальности до ИЗ, заключающемся в следующем: приеме акустических сигналов на одной частоте двумя линейными группами (ЛГ) звукоприемников (ЗП), преобразовании этих акустических сигналов в электрические сигналы, измерении амплитуд напряжений этих сигналов на выходах 1 и 2 КОС, расчете отношения амплитуды напряжения на выходе 1 КОС к амплитуде напряжения на выходе 2 КОС, определении пеленга на ИЗ и расчете амплитуды напряжения на выходе 1 ЛГ (несущей информацию об амплитуде звукового давления на входе пеленгатора на этой частоте), если бы направление на ИЗ совпадало с рабочей осью нормированной характеристики направленности (НХН) 1 ЛГ, расчете амплитуды звукового давления на входе пеленгатора на этой частоте; приеме акустических сигналов на другой частоте двумя линейными группами (ЛГ) звукоприемников (ЗП), преобразовании этих акустических сигналов в электрические сигналы, измерении амплитуды напряжения этого сигнала на выходе 1 КОС, расчете амплитуды напряжения на выходе 1 ЛГ (несущей информацию об амплитуде звукового давления на входе пеленгатора на этой частоте), если бы направление на ИЗ совпадало с рабочей осью нормированной характеристики направленности (НХН) 1 ЛГ, расчете амплитуды звукового давления на входе пеленгатора на этой частоте; расчете дальности до ИЗ по предлагаемой формуле и расчетах топографических координат по приведенным АВ.
Заявляемый способ иллюстрируется следующими графическими материалами:
Фиг.1 Нормированная характеристика направленности 1 и 2 линейных групп звукоприемников акустического пеленгатора при приеме акустического сигнала на частоте f;
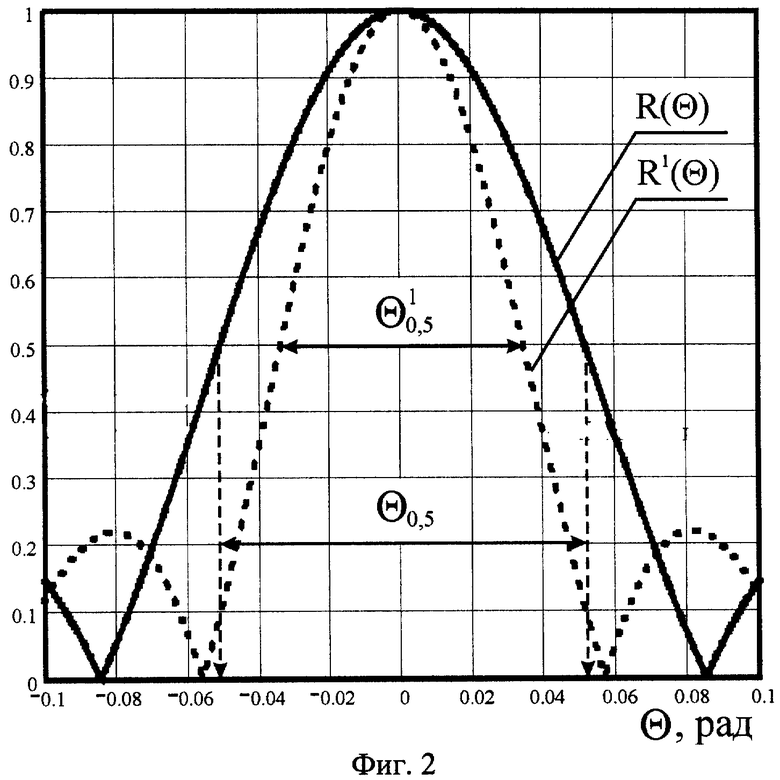
Фиг.2 Нормированные характеристики направленности 1 и 2 линейных групп звукоприемников акустического пеленгатора при приеме акустического сигнала на частотах fи f1;
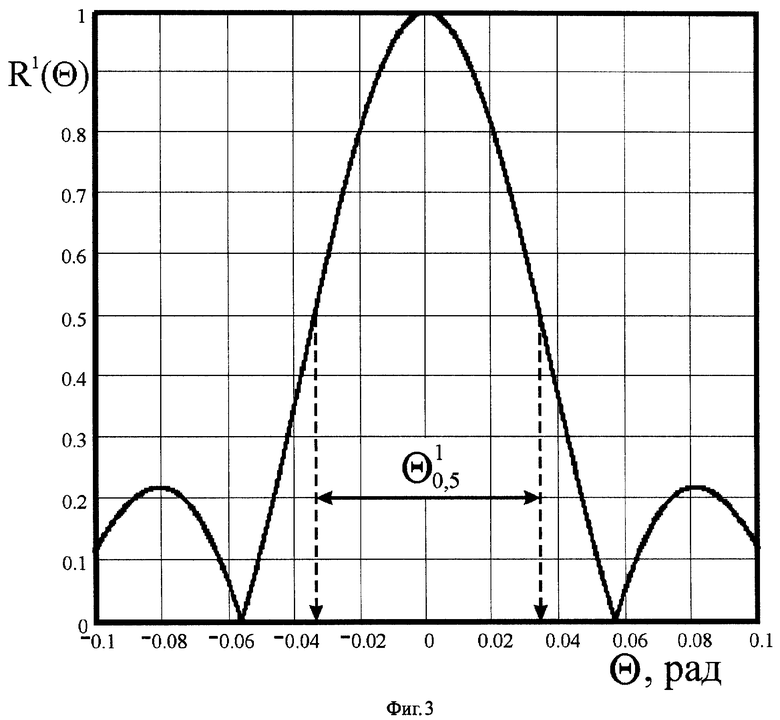
Фиг.3 Нормированная характеристика направленности 1 и 2 линейных групп звукоприемников акустического пеленгатора при приеме акустического сигнала на частоте f1;
Фиг.4 Электрическая структурная схема устройства, реализующего заявляемый способ;
Фиг.5 Схема ведения звуковой разведки;
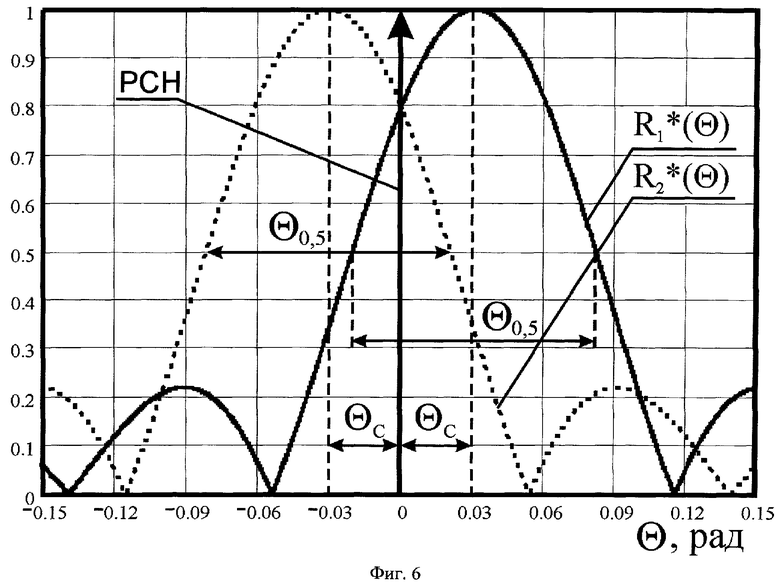
Фиг.6 Нормированные характеристики направленности 1 и 2 линейных групп звукоприемников акустического пеленгатора в случае использования ненаправленных ЗП в декартовой системе координат;
Фиг.7 Схема экранирования звука преградами (холмами, горами);
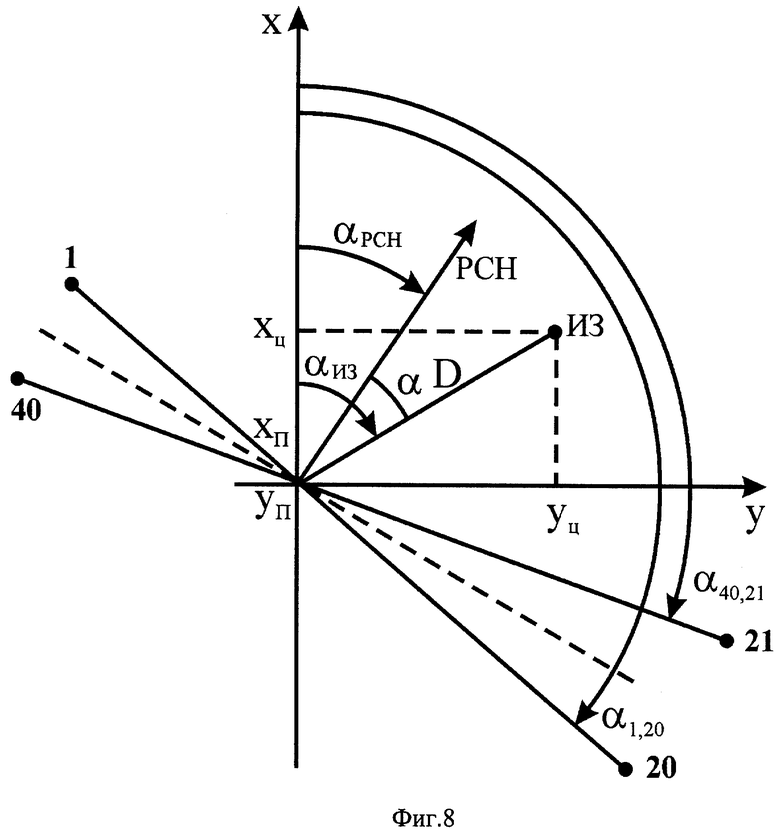
Фиг.8 Схема ведения звуковой разведки в северо-восточном направлении;
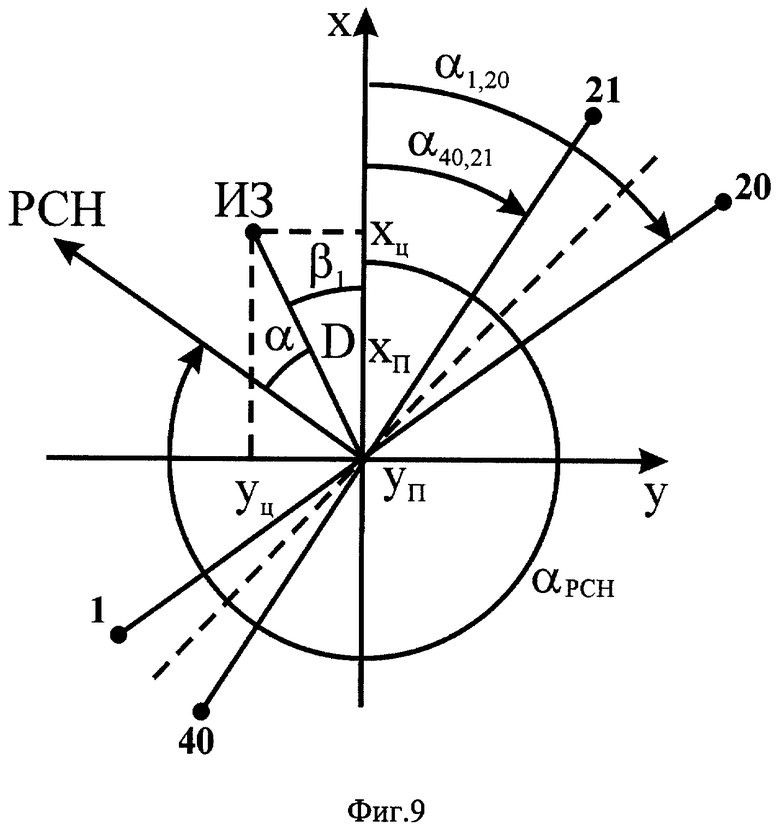
Фиг.9 Схема ведения звуковой разведки в северо-западном направлении;
Фиг.10 Схема ведения звуковой разведки в юго-западном направлении;
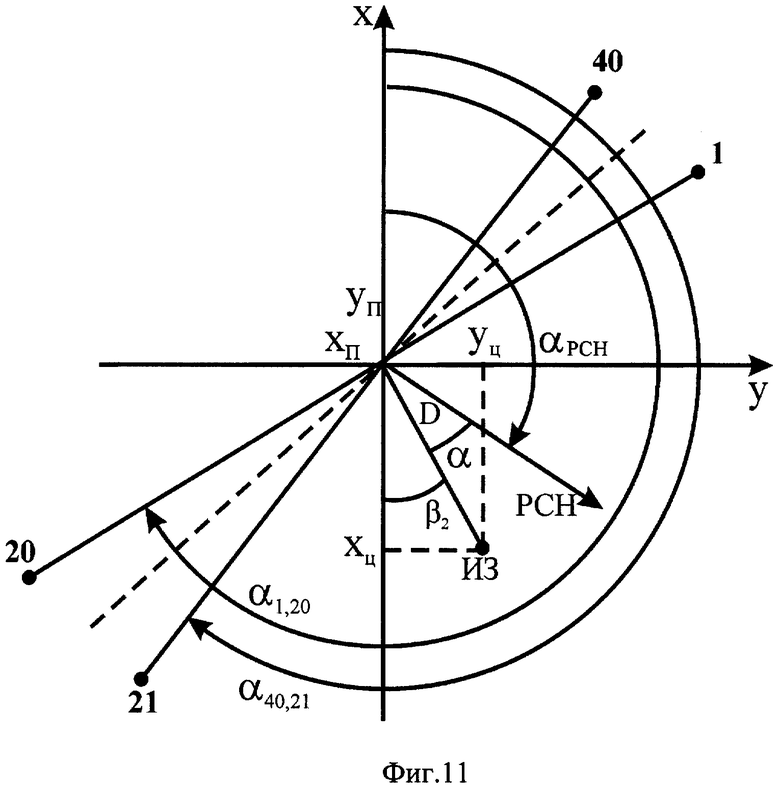
Фиг.11 Схема ведения звуковой разведки в юго-восточном направлении;
Фиг.12 Нормированные характеристики направленности звукоприемников 41 и 42 в декартовой системе координат;
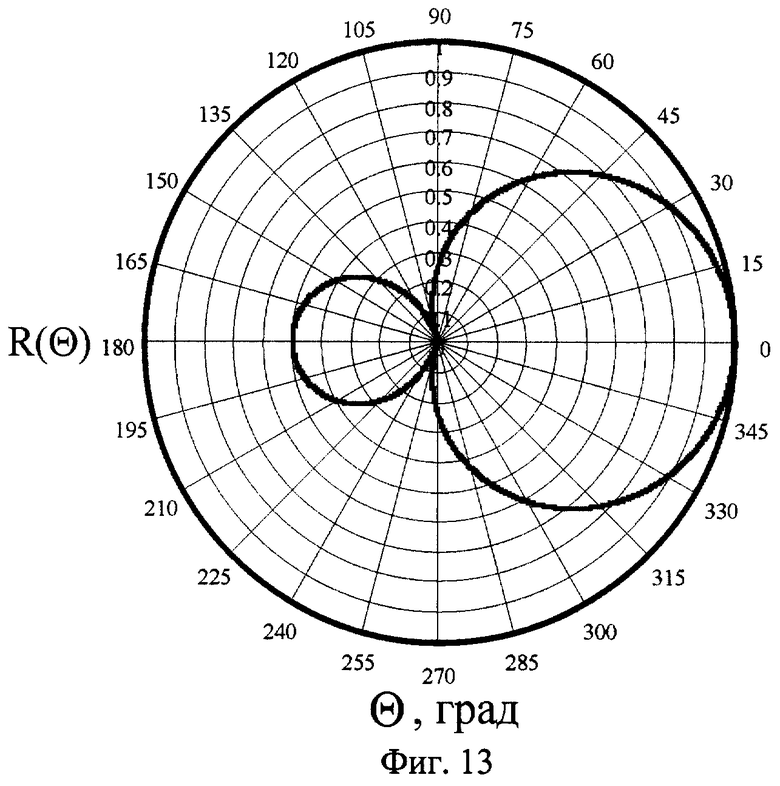
Фиг.13 Нормированные характеристики направленности звукоприемников 41 и 42 в полярной системе координат;
Фиг.14 Схема расположения звукоприемников;
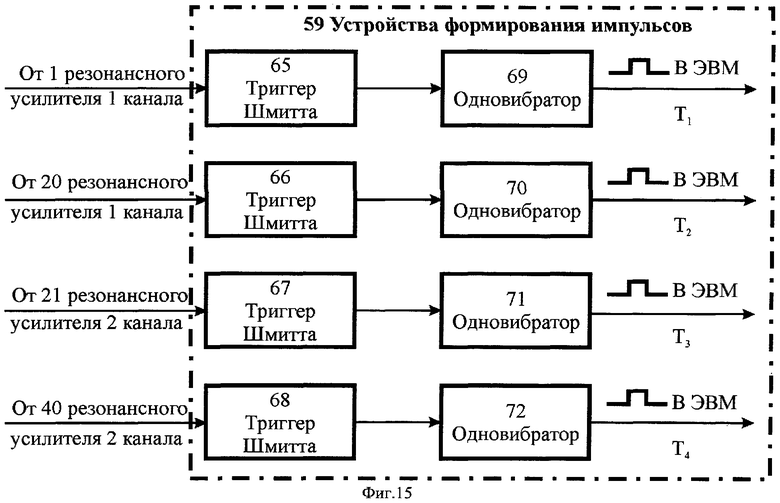
Фиг.15 Устройства формирования импульсов. Схема электрическая структурная;
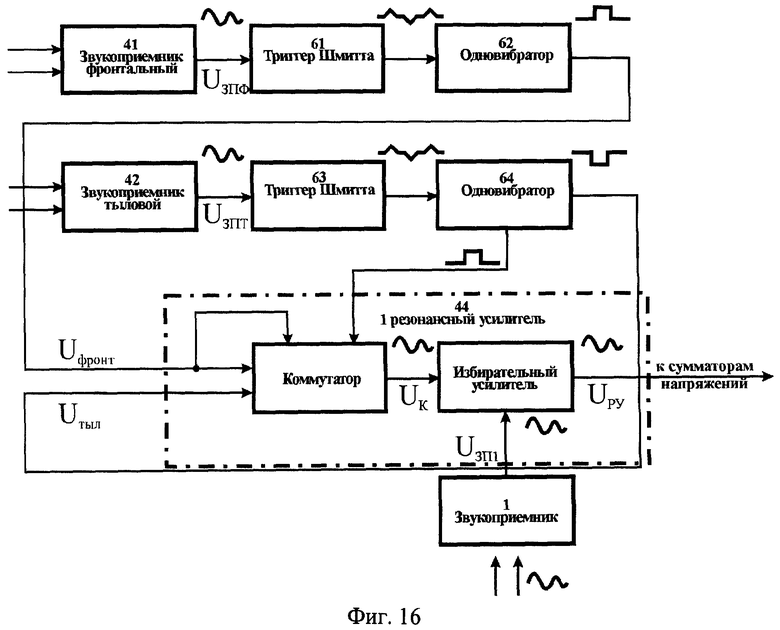
Фиг.16 Устройства управления работой резонансных усилителей. Схема электрическая структурная;
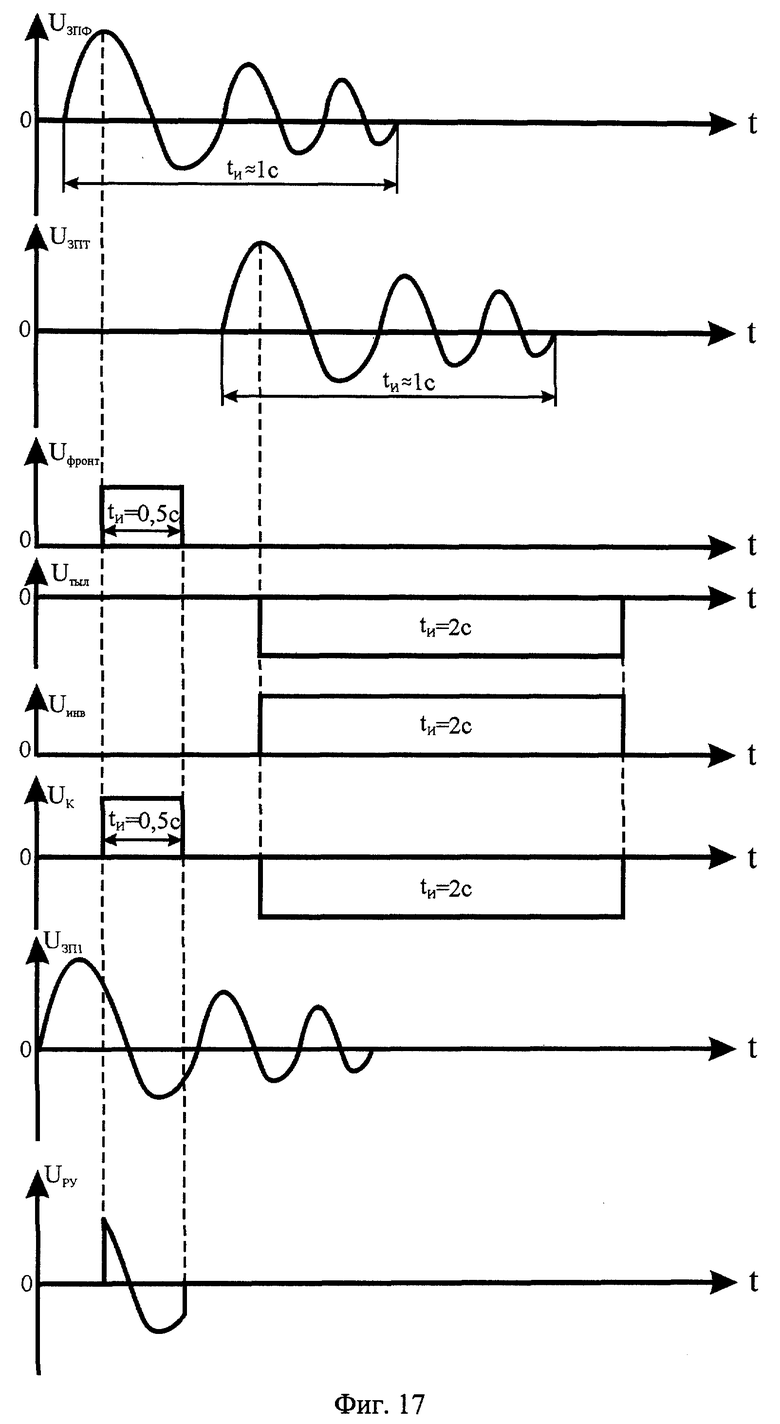
Фиг.17 Графики напряжений, поясняющие работу устройства управления резонансных усилителей при приеме акустического сигнала с фронта.
Фиг.18 Графики напряжений, поясняющие работу устройства управления резонансных усилителей при приеме акустического сигнала с тыла.
НХН 1и 2 ЛГ ЗП в пеленгаторе, реализующем предлагаемый способ измерения дальности до ИС на частоте f описываются такими АВ:
R1*(Θ)=R2*(Θ)=R(Θ)=RЗП|[sin(nksinΘ)]/[nsin(ksinΘ)]| (см. Фиг.1, 2 сплошная кривая), [13, с.214, АВ (VI. 49) и (VI. 50) с.198],
где RЗП - НХН каждого из ЗП, входящих в ЛГ (при ненаправленных ЗП RЗП=1[12, с.97, 98]);
n - число ЗП в каждой из ЛГ; k=πd/λ=πdf/CW;
Θ - угол в горизонтальной плоскости между направлением: ЗВП - источник акустического сигнала и произвольным направлением; Cw≈C±wcosϕ - скорость распространения звуковой волны с учетом влияния ветра [5, АВ (14)];
Знак «+» берется, когда ветер попутный направлению распространения звука, а знак «-» - когда ветер противоположный направлению распространения звука;
 [5, AB (1)];
[5, AB (1)];
t - температура воздуха в приземном слое атмосферы;
w - скорость ветра этом слое атмосферы;
ϕ - острый угол между вектором скорости ветра и направлением: источник AC - акустический пеленгатор;
С0=331,5 [5, АВ (11)].
НХН, приведенные на Фиг.1, 2 (сплошная кривая), рассчитаны при таких исходных данных (ИД): n=20; d=10 м; f=20 Гц; t=5°С; W=5 м/с; ϕ=0 рад.
НХН 1 и 2 ЛГ ЗП в пеленгаторе, реализующем предлагаемый способ измерения дальности до ИС на частоте f1, описываются такими АВ:

(см. Фиг.2 пунктирную кривую и Фиг.3), [13, с.214, АВ (VI. 49) и (VI. 50) с.198], где k1=πd/λ1=πdf1/CW.
НХН, приведенные на Фиг.3 и 2 (пунктирная кривая) - при вышеуказанных ИД но f1=30 Гц.
На Фиг.2 (для сравнения ширины НХН на уровне 0,5) эти НХН изображены вместе. Из НХН, изображенных на Фиг.1...3 видно, что ширина НХН на уровне 0,5 с увеличением частоты гармоники принимаемого АС уменьшается.
При реализации заявляемого способа автоматически измеряются в один и тот же момент времени амплитуды напряжений электрических сигналов с основной гармоникой f на выходах амплитудных детекторов (АД) 1 и 2 КОС U1 и U2 (см Фиг.4, 5, 6), которые можно описать следующими АВ:
U1=Ку U0 R(ΘC-α), [14, с.44...47],
где Ky - коэффициент передач (усиления) 1, 2 КОС и канала частоты f1, который определяется экспериментально и является известной величиной; U0 - амплитуда напряжения на выходе АД 1 и 2 КОС при приеме АС на частоте f при нахождении ИЗ на рабочей оси НХН ЛГ ЗП, если бы коэффициенты усиления (передачи) вышеназванных каналов были равны 1;
R(ΘC-α)=u1/v1; [(см. Фиг.1, 2), [13, с.214, АВ (VI.49) и (VI.50) с.198];

Θc=0,3Θ0,5, [14, с.46]; см. Фиг.6.
θ0,5 - ширина НХН ЛГ на уровне 0,5 при приеме сигнала на частоте f, которая определяется по графику НХН, описанной АВ для R(Θ), см. Фиг.1 и 2 (сплошную кривую);
или рассчитывается по следующей формуле:
θ0,5=2Θ1,
где Θ1-ΘJ, при  , -Θc≤α≤Θc;
, -Θc≤α≤Θc;
j - текущий номер приближения;
Е - заданное малое значение разности приближений пеленгов (например 10-6);
ΘJ и ΘJ-1 определяются из следующего выражения [15, с.145]:
 , при j=0,1,2,...,J-1, J; Θ0=0,01 рад;
, при j=0,1,2,...,J-1, J; Θ0=0,01 рад;

 [15, c.309];
[15, c.309];

 , [15, c.307, 309].
, [15, c.307, 309].
Амплитуда напряжения на выходе АД 2 КОС при приеме АС на частоте f примет вид
U2=KУ U0 R(ΘС+α), [14, с.44...47], где
R(ΘC+α)=u2/v2; 

Рассчитав отношение (см. Фиг.4, это делает ЭВМ) U1/U2=ηк, можно найти из этого АВ, используя метод последовательных приближений, значение пеленга ИЗ α (см. Фиг.4, это делает ЭВМ) в таком виде:

T1<Т4; Т2<Т3; T1 Т2; T1 Т2; T1<Т3; Т2<Т4; Т3 Т4; Т3 Т4, при приходе АС с одного из направлений внутри рабочего сектора пеленгатора;
Т2<T1; Т2<Т3; Т2<Т4; T1<Т4; Т3<Т4; Т3<T1, при приходе АС с правой границы рабочего сектора пеленгатора;
T1<Т4; T1<Т2; T1<Т3; Т4<Т2; Т4<Т3; Т2<Т3, при приходе АС с левой границы рабочего сектора пеленгатора;
при невыполнении вышеназванных условий расчет пеленга, дальности до ИЗ и его топографических координат не производится,
где T1, Т2, Т3, Т4 - времена прихода АС к ЗП 1...4 соответственно;
αJ и αJ-1, определяются из следующего выражения [15, с.145]:
 , при j=0, 1, 2,..., J-1, J,
, при j=0, 1, 2,..., J-1, J,
где  которое получено путем решения уравнения вида ηK=U1/U2=u1v2/u2v1 (оно приведено выше) относительно пеленга α;
которое получено путем решения уравнения вида ηK=U1/U2=u1v2/u2v1 (оно приведено выше) относительно пеленга α;







 [15, c.308];
[15, c.308];
 [15, c.308];
[15, c.308];
 [15, c.307-309];
[15, c.307-309];
 [15, c.307-309];
[15, c.307-309];
 [15, c.307-309];
[15, c.307-309];
 [15, c.307-309];
[15, c.307-309];
Из АВ для амплитуды напряжения на выходе АД 1 КОС при приеме АС на частоте f можно найти АВ для U0 (см.Фиг.4, это делает ЭВМ) в таком виде: U0=U1/[Ку R(ΘC-α)]. Амплитуда напряжения U0 пропорциональна амплитуде звукового давления на входе 1ЛГ Рм, т.е.
U0=PMK,
где К - коэффициент пропорциональности (определяемый экспериментально), учитывающий чувствительность ЛГ на соответствующей частоте, напряжение электропитания микрофонов и другие их конструктивные параметры.
Тогда PM=U0/K, а уровень этого звукового давления определится по такому АВ [11, с.15, АВ (1.17); 12, c.l2]:
L=20lg(PM/2·10-5),
который рассчитает ЭВМ.
По аналогии с вышеприведенным при приеме АС на частоте f1 рассчитывается амплитуда напряжения на выходе АД канала частоты f1 (см. Фиг.4)

где  - амплитуда напряжения на выходе АД канала частоты f1 (см. Фиг.4) при приеме АС на частоте f1 при нахождении ИЗ на рабочей оси НХН 1 ЛГ ЗП, если бы коэффициенты усиления (передачи) вышеназванного канала был равен 1;
- амплитуда напряжения на выходе АД канала частоты f1 (см. Фиг.4) при приеме АС на частоте f1 при нахождении ИЗ на рабочей оси НХН 1 ЛГ ЗП, если бы коэффициенты усиления (передачи) вышеназванного канала был равен 1;

 k1=πdf1/CW=πd/λ1.
k1=πdf1/CW=πd/λ1.
Из АВ для амплитуды напряжения на выходе АД канала частоты f1 при приеме АС на частоте f1 можно найти АВ для  в таком виде:
в таком виде:

Амплитуда напряжения пропорциональна амплитуде звукового давления на входе 1 ЛГ P1м, т.е.

где К1 - коэффициент пропорциональности (определяемый экспериментально), учитывающий чувствительность 1 ЛГ на частоте f1, напряжение электропитания микрофонов и другие их конструктивные параметры.
Тогда 
а уровень этого звукового давления определится по такому АВ [11, с.15, АВ (1.17); 12, c.l2]:
L1=20lg(P1М/2·10-5).
Величина Δ2, обусловленная снижением уровня звукового давления различными преградами (она рассчитывается ЭВМ), при приеме АС на частоте f определится по такому АВ:
 [11, с.189, АВ (6.33)];
[11, с.189, АВ (6.33)];
где  [11, c.172];
[11, c.172];
Nф=2δ/λ;
δ=a+b-dЛ;
(a+b) - длина кратчайшего пути от примерного центра района особого внимания (РОВ) к пеленгатору, проходящего через верхнюю кромку экрана (например, холма или горы), см. Фиг.7, где ИЗ - примерный центр РОВ, АП - акустический пеленгатор, которая может быть измерена по топографической карте и введена в ЭВМ перед ведением звуковой разведки;
dЛ - расстояние между примерным центром РОВ и пеленгатором по прямой (визирной) линии, см. Фиг.7, которое также может быть измерено по топографической карте и введено в ЭВМ перед ведением звуковой разведки;
λ=CW/f - длина звуковой волны с учетом параметров ветра в приземном слое атмосферы при приеме АС на частоте f;
ΔLэкр=5 дБ, при δ=0, [11, с.172].
Величина ΔLпов, обусловленная снижением уровня звука подстилающей поверхностью, зависит от вида этой поверхности.
Если подстилающая поверхность с травяным (снежным) покровом, а высоты расположения источника АС НИ и ЛГЗП h над поверхностью земли не менее 1 м и частоты f и f1 находятся в диапазоне fH...fB, причем fH=2·103·D1/2, а fB=20D/hHИ, то при приеме АС на частоте f ΔLпов определится по такому АВ:
 [11, c.177],
[11, c.177],
где DPOB - расстояние от пеленгатора до примерного центра РОВ, которое можно измерить перед боевой работой пеленгатора по топографической карте и ввести в ЭВМ.
Если подстилающая поверхность жесткая (например, лед или каменистая почва) и отраженный луч попадает в ЛГ ЗП, то
ΔLпов=0, [11, с.177],
Если подстилающая поверхность жесткая (например, лед или каменистая почва), но отраженный луч не попадает в ЛГ ЗП (экранируется складками местности), то
ΔLпов=3 дБ, [11, с.177].
Величина βЗЕЛ, обусловленная снижением уровня звука лесом и лесополосами:
(она рассчитывается ЭВМ), при приеме АС на частоте f определится по такому АВ:
 [11, c.178];
[11, c.178];
βАзел=0,08 дБ/м - для декоративных лесополос с густой крупной листвой;
βАзел=0,25 дБ/м - для плотных лесополос;
βАзел=0,08 дБ/м - для специальных шумозащитных лесополос с плотным смыканием крон деревьев и заполнением подкронового пространства кустарником и лесных массивов;
1 - путь, проходимый АС из РОВ через лесные массивы и полосы к пеленгатору, который также можно измерить перед боевой работой пеленгатора по топографической карте.
Типы лесополос и лесных массивов можно определить по топографической карте.
Величина  , обусловленная снижением уровня звукового давления различными преградами (она рассчитывается ЭВМ), при приеме АС на частоте f1 определится по такому АВ:
, обусловленная снижением уровня звукового давления различными преградами (она рассчитывается ЭВМ), при приеме АС на частоте f1 определится по такому АВ:
 [11, c.189, AB(6.33)],
[11, c.189, AB(6.33)],
где  [11, c.172];
[11, c.172];
 =2δ/λ1;
=2δ/λ1;
 при δ=0, [11, c.172].
при δ=0, [11, c.172].
 [11, c.177],
[11, c.177],
Если подстилающая поверхность жесткая (например лед или каменистая почва) и отраженный луч попадает в ЛГ ЗП, то
 [11, c.177],
[11, c.177],
Если подстилающая поверхность жесткая (например лед или каменистая почва), но отраженный луч не попадает в ЛГ ЗП (экранируется складками местности), то
 [11, с.177].
[11, с.177].
Коэффициент поглощения звука лесом и лесополосами при приеме АС на частоте f1 можно определить по такому АВ:
 [11, с.178].
[11, с.178].
Коэффициент поглощения звука в воздухе при приеме АС на частоте f, определяется таким АВ:
 см. [12, c.21, AB (6.31)],
см. [12, c.21, AB (6.31)],
где ρ - плотность воздуха;
η - коэффициент вязкости воздуха (например, η=1,402 при t=15°C и атмосферном давлении 101325 Па [12, с.6]);
ν=Ср/Сv - коэффициент адиабаты;
Ср - теплоемкость воздуха при постоянном давлении;
Сv - теплоемкость воздуха при постоянном объеме;
χ - коэффициент теплопроводности воздуха.
Коэффициент поглощения звука в воздухе при приеме АС на частоте f1, определяется таким АВ:
 см. [12, c.21, AB(6.31)].
см. [12, c.21, AB(6.31)].
Дальность до ИЗ от пеленгатора определится по такому АВ:

Топографические координаты ИЗ при ведении звуковой разведки в северо-восточном направлении определятся по такому АВ (см. Фиг.8):
xц=xп+D cosαиз=xп+D cos(αрсн+α);
уц=уп+D sinαиз=уп+D sin(αрсн+α),
где xп, yп - топографические координаты пеленгатора, определяемые его системой топопривязки;
D - дальность до ИЗ, определяемая по АВ (2);
αиз - дирекционный угол ИЗ;
αрсн=α1,20-Θс-π/2 - дирекционный угол РСН, рассчитываемый ЭВМ (см. Фиг.8);
Θс=(α1,20-α40,21)/2,
т.к. 2Θс=(α1,20-α40,21), см. Фиг.8;
α1,20, α40,21 - дирекционные углы с 1 ЗП на 20 ЗП и с 40 на 21 ЗП соответственно, определяемые, например, артиллерийским гирокомпасом.
Топографические координаты ИЗ при ведении звуковой разведки в северо-западном направлении определятся по такому АВ (см. Фиг.9):
xц=xп+D cosβ1=xп+D cos[2π-(αрсн+α)];
yц=yп-D sinβ1=уп-D sin(αрсн+α),
αрсн=α1,20-Θс+3π/2 - дирекционный угол РСН, рассчитываемый ЭВМ (см. Фиг.9).
Топографические координаты ИЗ при ведении звуковой разведки в юго-западном направлении определятся по такому АВ (см. Фиг.10):
xц=xп-D cosβ2=xп-D cos[αрсн-π)+α];
уц=уп-D sinβ2=уп-D sin[αрсн-π)+α];
αрсн=α1,20-Θс-π/2, см. Фиг.10.
Топографические координаты ИЗ при ведении звуковой разведки в юго-восточном направлении определятся по такому АВ (см. Фиг.11):
xц=xп-D cosβ3=xп-D cos[π-(αрсн+α)];
уц=уп+D sin β3=уп+D sin[π-(αрсн+α)];
αрен=α1,20-Θс-π/2, см. Фиг.11.
Электрическая структурная схема пеленгатора, реализующего предлагаемый способ измерения дальности, приведена на Фиг.4. Состав и назначение устройств, входящих в эту схему, следующее: звукоприемники (ЗП) 1...42, каждый из которых включает в себя конденсаторный или электретный микрофон, предварительный усилитель микрофонного сигнала, фильтр нижних частот (ФНЧ) и источник постоянного тока, помещенные в куполообразный ветрозащитный корпус, в верхней части которого вмонтирован шаровой уровень, позволяющий устанавливать рабочие оси микрофонов вертикально (это обеспечивает круговую НХН их в горизонтальной плоскости). ЗП 1...40 решают следующие задачи: принимают акустические сигналы и помехи из окружающего пространства; преобразуют их в электрические сигналы и помехи; выделяют эти сигналы из указанной смеси сигналов и помех; ослабляют влияние ветровых помех, предотвращают попадание влаги к их устройствам и передают сигналы, а также помехи, амплитудный спектр которых одинаков с амплитудно-частотной характеристикой ФНЧ, в резонансные усилители (РУ). Звукоприемники фронтальный 41 и тыловой 42 по своему составу аналогичны остальным, но корпус у них одинаков с корпусом ЗП, например, звукометрической стации СЧЗ - 6 [6, см. с.83] или СЧЗ - 6М.ЗП 41 и 42 располагаются относительно ЛГ так, как показано на Фиг.16. Рабочие оси этих ЗП располагаются горизонтально, а рабочий лепесток (больший лепесток) НХН ЗП 41 располагается в направлении РОВ (в сторону фронта), а - ЗП 42 - в сторону своих войск (в тыл), см. Фиг.14, 15. НХН этих ЗП описывается гиперкардиоидой
R(Θ)=М+γcos©, [12, см.97,98], где М=0,25; γ=0,75, см. Фиг.12, 13.
Это обеспечивает прием АС, попавших в рабочий сектор с фронта, и не допущение в КОС акустических помех, образующихся при залпах артиллерийских батарей наших войск, поступающих с тыла. Особенность их назначения перед другими ЗП состоит в том, что ЗП 41 передает сигнал на триггер Шмитта 61, а ЗП 42 - на триггер Шмитта 63. ЗП 1, ЗП 20, ЗП 21 и ЗП 40 подают свои сигналы и на РУ 45. ЗП 1...ЗП 20 и ЗП 21...ЗП 40 образуют 1 и 2 ЛГ соответственно (см. Фиг.4...6), что обеспечивает узкие НХН (см. Фиг.1...3 и 6) и, следовательно, высокую помехозащищенность пеленгатора за счет пространственной селекции ИЗ (целей).
РУ 43, 44, 46 (их по 20 штук в каждом блоке), каждый из которых включают в себя коммутатор на 2 входа и 1 выход, который подключен к одному из входов РУ, и сам РУ (избирательный усилитель (ИУ), с центральной частотой полосы пропускания f; в РУ 43 эта частота равна f1. РУ 45 содержит только 4 ИУ, которые не имеют коммутатора на входе; их центральная частота полосы пропускания также равна f. ИУ РУ 1 и 2 каналов 44 и 46 предназначены для выделения гармоники с частотой f из амплитудного спектра электрических сигналов и помех, поступающих с ЗП 1...20 1 ЛГ и с ЗП 21...40 2 ЛГ, после прихода импульса положительной полярности с одновибратора 62 (селекторного импульса) и подачи ее на соответствующие сумматоры напряжений 48, 49. РУ 43 предназначен для выделения гармоники с частотой f1 из амплитудного спектра электрических сигналов и помех, поступающих с ЗП 1...20 1 ЛГ, и подачи ее на сумматор напряжений канала частоты f1 47 после прихода импульса положительной полярности с одновибратора 62.
Резонансные усилители 45 предназначены для выделения основной гармоники с частотой f из амплитудного спектра электрических сигналов и помех, поступающих с ЗП 1, 20, 21, 40, и подачи ее на устройства формирования импульсов 59 после прихода АС к соответствующему ЗП.
Сумматоры напряжений канала частоты f1 47, 1 канала 48,2 канала 49 имеют по 20 входов и 1 выходу. Они предназначены для суммирования соответствующих напряжений и подачи их на амплитудные детекторы (АД) в период действия селекторного импульса.
Амплитудные детекторы 50...52 определяют наибольшие амплитуды напряжений суммарных сигналов в своих каналах обработки, преобразуют их в постоянные напряжения и подают их на соответствующие 8-разрядные аналого-цифровые преобразователи (АЦП) 53...55 своих каналов.
Последние преобразуют постоянные напряжения, несущие информацию о вышеуказанных амплитудах напряжений (см. Фиг.4), в цифровой код и передают ее в соответствующие регистры.
Регистры канала частоты f1 56,1 канала 57,2 канала 58 построены на основе триггеров, имеют один вход и 8 выходов. Регистр канала частоты f1 56 служит для регистрации величины напряжения  и ввода ее в ЭВМ 60. Регистр 1 канала 57 служит для регистрации величины напряжения U1 и ввода ее в ЭВМ 60. Регистр 2 канала 58 служит для регистрации величины напряжения U2 и ввода ее в ЭВМ 60.
и ввода ее в ЭВМ 60. Регистр 1 канала 57 служит для регистрации величины напряжения U1 и ввода ее в ЭВМ 60. Регистр 2 канала 58 служит для регистрации величины напряжения U2 и ввода ее в ЭВМ 60.
Устройства формирования импульсов 59 включают в себя 4 канала обработки АС (см. Фиг.15). Каналы обработки АС включают в себя: триггеры Шмитта 65...68; одновибраторы 69...72.
Триггеры Шмитта предназначены для формирования остроконечных треугольных импульсов из соответствующих гармонических и квазигармонических электрических сигналов и подачи их на соответствующие одновибраторы (см. Фиг.15).
Одновибраторы 62, 64 (см. Фиг.4, 16...18) представляют из себя заторможенные мультивибраторы. Одновибратор 62 предназначен для формирования прямоугольных импульсов положительной полярности длительностью 0,5 с и подачи его на 1 основной и 1 управляющий входы коммутаторов РУ 43, 44 и 46.
Одновибратор 64 предназначен для формирования прямоугольных импульсов положительной и отрицательной полярности длительностью 2 с. Причем импульс положительной полярности подается на 2 управляющий входы коммутаторов РУ 43, 44 и 46, а импульс отрицательной полярности подается на 2 основной входы коммутаторов РУ 43, 44 и 46.
Одновибраторы 69...72 представляют из себя заторможенные мультивибраторы и предназначены для формирования прямоугольных импульсов положительной полярности длительностью 1 с, подаваемых в ЭВМ 60 (см. Фиг.4, 15).
ЭВМ 60 (см. Фиг.4) решает следующие задачи: рассчитывает пеленги, используя алгоритм их расчета, представленный выше, и текст программы, представленный в приложении 2; рассчитывает удаления источника АС от пеленгатора, используя алгоритм их расчета, представленный выше, определяет времена прихода сигналов (Т1, Т2, Т3, Т4), определяющие принадлежность источника АС рабочему сектору акустической антенны; вырабатывает тактовые импульсы, импульсы "Чтение" и "Сброс", обеспечивающие работу регистров канала частоты f1 56,1 и 2 каналов; присваивает номер цели (источнику АС), фиксирует астрономическое время проявления этой цели, рассчитывает ее прямоугольные топографические координаты xц, yц, используя алгоритм их расчета, представленный выше, и текст программы, представленный в приложении 2; передает эти данные на командный пункт артиллерийского дивизиона.
Триггеры Шмитта 61 и 63 предназначены для формирования остроконечных треугольных импульсов из соответствующих гармонических и квазигармонических электрических сигналов, поступающих с ЗП фронтального 41 и ЗП тылового 42 соответственно, и подачи их на одновибраторы 62 и 64 (см. Фиг.4).
Одновибраторы 62 и 64 представляют из себя также заторможенные мультивибраторы. Одновибратор 62 вырабатывает селективный импульс, поступающий на первый и управляющий входы коммутатора (см. Фиг.16) длительностью 0,5 с (см. Фиг.17, 18). Одновибратор 64 вырабатывает прямоугольный импульс отрицательной полярности, поступающий на второй вход коммутатора (см. Фиг.16) длительностью 2 с (см. Фиг.17, 18), а также на вход инвертора (см. Фиг.16).
Предлагаемое устройство работает следующим образом: при приеме АС из рабочего сектора пеленгатора звуковая волна достигает, например, ЗП 1 (см. Фиг.4, 5 и 14 ), последний преобразует этот АС в электрический сигнал (ЭС) и подает его на 1 ИУ блока РУ 45, с выхода этого усилителя сигнал поступает на триггер Шмитта 65, последний сформирует из этого ЭС импульсы треугольной формы, поступающие на одновибратор 69. Первый из этих импульсов вызовет формирование этим одновибратором прямоугольного импульса положительной полярности длительностью 1 с, который поступит в ЭВМ. Последняя зафиксирует время T1. При поступлении АС к ЗП 2, ЗП 3 и т.д., последние преобразуют этот АС в ЭС и подают их на 1 входы соответствующих коммутаторов (см. Фиг.4, 5 и 14 ), но далее эти ЭС не пройдут, т.к. в это время на коммутаторы не поступает селекторный импульс. С приходом АС к ЗП 21 преобразует его в ЭС и подает его на 1 ИУ блока РУ 46, с выхода этого усилителя сигнал поступает на триггер Шмитта 67, последний сформирует из этого ЭС импульсы треугольной формы, поступающие на одновибратор 71. Первый из этих импульсов вызовет формирование этим одновибратором прямоугольного импульса положительной полярности длительностью 1 с, который поступит в ЭВМ. Последняя зафиксирует время Т2 (см. Фиг.4, 5, 14).
Аналогичные процессы произойдут в пеленгаторе при приеме АС ЗП 20 и 40. В результате произойдет фиксирование ЭВМ времен Т3 и Т4.
При поступлении АС к ЗП фронтальному 41 (см. Фиг.4, 5, 14...18) на его выходе сформируется ЭС, который поступит на триггер Шмитта, последний сформирует последовательность импульсов треугольной формы, первый из которых вызовет срабатывание одновибратора 62. Он сформирует селекторный импульс, который поступит на 1 и управляющий входы всех коммутаторов РУ 43, 44 и 46, в результате чего все ИУ этих блоков РУ выделят на время 0,5 с и усилят ЭС, которые поступят на соответствующие сумматоры напряжений 47...49. Последние сформируют соответствующие суммарные ЭС, которые поступят на свои АД. Они преобразуют наибольшие амплитуды суммарных ЭС в постоянные напряжения, которые поступят на свои АЦП 53...55. Последние преобразуют их в двоичный код и передадут эту информацию в соответствующие регистры 56...58, а затем в ЭВМ. Таким образом, информация об амплитудах U1, U2 и поступит в ЭВМ, где в соответствии с представленным выше алгоритмом и текстом программы будут рассчитаны вышеназванные величины.
При поступлении АС к ЗП тыловому 42 (см. Фиг.1, 3, 16...18) на его выходе сформируется ЭС, который поступит на триггер Шмитта, последний сформирует последовательность импульсов треугольной формы, первый из которых вызовет срабатывание одновибратора 64. Он сформирует 2 импульса, отрицательной и положительной полярности длительностью 2 с. Импульс положительной полярности поступит на 2 управляющий вход всех коммутаторов РУ 43, 44 и 46, а отрицательной полярности - на 2 основной вход всех этих коммутаторов. В результате чего все ИУ этих блоков РУ будут закрыты на время 2 с, поэтому на сумматоры напряжений сигналы поступать не будут.
При отсутствии АС на входах ЗП все ИУ РУ 43, 44 и 46 закрыты, т.к. коммутаторы их отключают от своих входов.
При поступлении АС с тыла он достигает сначала ЗП тылового 42, который обеспечивает формирование 2 вышеуказанных импульсов, что в конечном счете закрывает ИУ всех РУ на время 2 с. Поэтому при прохождении этого сигнала через ЗП ЛГ их сигналы не поступают в ИУ РУ.
При поступлении АС из направлений вне сектора разведки обработка сигнала будет производится по всем 3 каналам, но определение пеленгов источников АС, дальностей до них и их топографических координат производится не будет, т.к. не будут выполняться условия, описанные в АВ (1).
Техническая реализация вышеназванного способа возможна, что покажем ниже. ЗП 1...40 при пеленговании стреляющих артиллерийских орудий, минометов, разрывов снарядов, боевых частей ракет и мин могут представлять собой звукоприемники (приборы Пр-2), используемые в автоматизированных звукометрических комплексах АЗК-5 [16].
ЗП 41,42 по своему составу аналогичны ЗП 1...40, но микрофоны у них типа МКЕ 802 [12, с.126], КМКЭ-1 [12, с.130] или КМС-19-03 (ветрозащитный) [12, с.130].
В качестве коммутаторов, имеющихся в РУ 43, 44, 46, можно использовать четырехканальные коммутаторы, например, К190КТ2, описанные в [20, с.105, 106].
В качестве ИУ, имеющихся в РУ 43-46, можно использовать, например, ИУ на операционном усилителе (ОУ) с двойным Т-образным мостом [18, с.167, 168].
В качестве сумматоров напряжений 47-49 можно использовать устройства на основе операционного усилителя [17, с. 213, 214].
В качестве амплитудных детекторов можно применить, например, простой детектор видеоимпульсов [21, с.253, 254].
В качестве АЦП можно использовать К572ПВЗ или К572ПВ4 [20, с.110].
В качестве регистров можно использовать, например, 8-разрядный сдвигающий регистр К555ИР8 [20, с.117].
В качестве ЭВМ 60 целесообразно использовать Pentium IV 1700 MHz /512 Mb DDR /60 Gb HDD 7200 rpm.
В качестве триггеров Шмитта 61, 63, 65-68 можно использовать, например, интегральные микросхемы К118ТЛ1А и ее модификации [19, с.39] или устройства на основе ОУ, описанные в [18, с.186].
В качестве одновибраторов 62,64, 69-72 целесообразно использовать, например, интегральные микросхемы К224АГ2 [18, с.192-194] или К155АГЗ [18, с.116].
Таким образом, вышеуказанные устройства пеленгатора технически реализуемы.
Литература
1. Патент США 3042897, кл. 340-6. Гидроакустический пеленгатор. Опубликован в 1962г. Бюллетень №20, 1962.
2. Патент ФРГ 1807535, кл. G 01 S. Акустический пеленгатор. Опубликован в 1970 г. Бюллетень №24.
3. Патент ФРГ 2027940, кл. G 01 S 3/80. Акустический пеленгатор. Опубликован в 1977г. Бюллетень №7.
4. Патент РФ 2048678 кл. G 01 S 3/80. Пеленгатор источников акустических излучений. / Хохлов В.К. и др./. Опубликован 20.11.1995 г. Бюллетень №.
5. Таланов А.В. Артиллеристская звуковая разведка. - М.: Воениздат, 1957. - 350 с.
6. Сергеев В.В. Основания устройства и элементы проектирования звукометрической аппаратуры. - Пенза: ПВАИУ, 1964. 143 с.
7. Автоматизированный звукометрический комплекс АЗК - 5 (Изделие 1Б17). Техническое описание. БМ, 1977.
8. Автоматизированный звукометрический комплекс АЗК - 7.Техническое описание. БМ, 1987.
9. Шмелев В.В. Многоканальный акустический равносигнальный пеленгатор. Оборонная техника, №10-11. - М. 1996, с.17-19.
10. Патент РФ 2138059 кл. G 01 S 3/00, 3/80, 15/08. Акустический пеленгатор. / Волощенко В.Ю./. Опубликован 20.09. 1999 г. Бюллетень №26. Прототип.
11. Борьба с шумом на производстве. Справочник. Под общ. Ред. Е.Я.Юдина. - М.: Машиностроение, 1985. - 400 с.
12. Иофе В.К., Корольков В.Г., Сапожков М.А. Справочник по акустике. - М.: Связь, 1979. - 312 с.
13. Вахитов Я.Ш. Теоретические основы электроакустики и электроакустическая аппаратура. - М.: Искусство, 1982. - 600 с.
14. Справочник по основам радиолокационной техники. Под ред. В.В.Дружинина. - М.: Воениздат, 1967. - 768 с.
15. Бронштейн И.Н., Семендяев К.А. Справочник по математике. - М.: Наука, 1964. - 608с.
16. Система С-1. Альбом электрических принципиальных схем. - БМ, 1980.
17. Павлов В.Н. Ногин В.Н. Схемотехника аналоговых электронных устройств. - М.: Горячая линия Телеком, 2001. - 320 с.
18. Забродин Ю.С. Промышленная электроника: Учебник для вузов. - М.: Высшая школа, 1992. - 496 с.
19. Булычев А.Л., Галкин В.И., Прохоренко В.А. Аналоговые интегральные схемы: Справочник. - Минск: Беларусь, 1993. - 382 с.
20. Справочник разработчика и конструктора РЭА. Элементная база. Книга I. - М.: Итар-ТАСС, 1993. - 157 с.
21. Теория и расчет основных радиотехнических схем на транзисторах. - М.: Связь, 1964. - 456 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 2004 |
|
RU2274873C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА | 2006 |
|
RU2323449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА ПРИ РАЗМЕЩЕНИИ АКУСТИЧЕСКОЙ АНТЕННЫ АКУСТИЧЕСКОГО ЛОКАТОРА НА НАКЛОННЫХ ПЛОЩАДКАХ ПОВЕРХНОСТИ ЗЕМЛИ | 2014 |
|
RU2549919C1 |
| АКУСТИЧЕСКИЙ ЛОКАТОР ИМПУЛЬСНЫХ ИСТОЧНИКОВ ЗВУКА | 2013 |
|
RU2529827C1 |
| АКУСТИЧЕСКИЙ ЛОКАТОР | 2008 |
|
RU2374665C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2006 |
|
RU2331904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА В НИЖНИХ СЛОЯХ АТМОСФЕРЫ | 2006 |
|
RU2339980C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ИСТОЧНИКА ЗВУКОВОГО СИГНАЛА ЗВУКОМЕТРИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2734289C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АРТИЛЛЕРИИ ПРОТИВНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (РЕАЛИЗАЦИИ) | 2015 |
|
RU2624483C2 |







Изобретение относится к акустическим пеленгаторам и может быть использовано для определения удаления и топографических координат источника звука (ИЗ). Достигаемый технический результат - уменьшение систематических и случайных ошибок измерения дальности, расширение круга решаемых пеленгаторами задач и повышение их пропускной способности. В способе выполняют прием акустических сигналов двумя линейными группами звукоприемников (ЛГЗ). В первом и втором каналах обработки (КО) обрабатывают электрические сигналы с частотой f, принятые первой и второй ЛГЗ, а в канале частоты f1 - сигналы с частотой f1, принятые первой ЛГЗ. Пеленг на ИЗ определяют с использованием отношения амплитуд напряжения на выходах первого и второго КО. Вычисляют амплитуду напряжения сигнала на выходе первого КО в предположении, что ИЗ находится на рабочей оси нормированной характеристики направленности первой ЛГЗ. Амплитуду звукового давления на входе первой ЛГЗ на частоте f определяют путем деления вычисленной величины на коэффициент пропорциональности, определяемый экспериментально на частоте f. Вычисляют уровень звукового давления на входе первой ЛГЗ. Аналогичные вычисления проводят для сигнала частоты f1. Определяют тип подстилающей поверхности, снижение уровня звукового давления, вызываемое влиянием преград, метеорологическими и атмосферными факторами. Дальность и топографические координаты рассчитывают с учетом влияния указанных факторов. 18 ил.
Способ измерения дальности и определения местоположения источника звука, заключающийся в том, что принимают акустические сигналы первой и второй линейными группами звукоприемников, преобразуют акустические сигналы в пропорциональные электрические сигналы, подают электрические сигналы в каналы обработки, выделяют и усиливают сигналы на частотах f, равной частоте основной гармоники спектра акустического сигнала источника звука, и f1, измеряют амплитуды напряжений выделенных сигналов на выходах каналов обработки, определяют пеленг на источник звука, определяют амплитуду звукового давления на входе первой линейной группы звукоприемников на частотах f и f1, рассчитывают дальность до источника звука, отличающийся тем, что в первом и втором каналах обработки обрабатывают электрические сигналы с частотой f, принятые первой и второй линейными группами звукоприемников соответственно, а в канале частоты f1 - электрические сигналы с частотой f1, принятые первой линейной группой звукоприемников, пеленг на источник звука определяют с использованием отношения амплитуды напряжения на выходе первого канала обработки к амплитуде напряжения на выходе второго канала обработки, вычисляют амплитуду напряжения сигнала на выходе первого канала обработки, если бы источник звука находился на рабочей оси нормированной характеристики направленности первой линейной группы звукоприемников, амплитуду звукового давления на входе первой линейной группы звукоприемников на частоте f определяют путем деления вычисленной амплитуды напряжения на коэффициент пропорциональности, определяемый экспериментально на частоте f, вычисляют уровень звукового давления на входе первой линейной группы звукоприемников на частоте f, вычисляют амплитуду напряжения сигнала на выходе канала частоты f1, если бы источник звука находился на рабочей оси нормированной характеристики направленности первой линейной группы звукоприемников, амплитуду звукового давления на входе первой линейной группы звукоприемников на частоте f1 определяют путем деления вычисленной амплитуды напряжения на коэффициент пропорциональности, определяемый экспериментально на частоте f1, вычисляют уровень звукового давления на входе первой линейной группы звукоприемников на частоте f1, определяют тип подстилающей поверхности по топографической карте и пеленгу на источник звука, определяют снижение уровня звукового давления на частотах f и f1, вызываемое влиянием преград, типом подстилающей поверхности, лесом, направлением и скоростью ветра, температурой воздуха, атмосферным давлением в приземном слое атмосферы, определяют коэффициенты поглощения звука воздухом на частотах f и f1 на основе вязкости и плотности воздуха, теплоемкости при постоянном давлении и постоянном объеме, коэффициента теплопроводности, дальность до источника звука рассчитывают с использованием определенных уровней звукового давления, снижения уровня звукового давления, коэффициентов поглощения звука воздухом, с использованием рассчитанной дальности определяют топографические координаты источника звука.
| АКУСТИЧЕСКИЙ ПЕЛЕНГАТОР | 1996 |
|
RU2138059C1 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| US 3042897, 03.07.1962 | |||
| ПУЧОК ТРУБ ДЛЯ КАБЕЛЕПРОВОДОВ | 1992 |
|
RU2027940C1 |
| DE 3239403, 26.04.1984 | |||
| GB 1506700, 11.11.1971 | |||
| УСТРОЙСТВО для очистки КАМЕННЫХ МАТЕРИАЛОВ ОТ ЗАГРЯЗНЯЮЩИХ ПРИМЕСЕЙ | 0 |
|
SU348363A1 |
| СРЕДСТВО, ОБЛАДАЮЩЕЕ ПРОТИВОВОСПАЛИТЕЛЬНЫМ, ОБЩЕУКРЕПЛЯЮЩИМ И СПАЗМОЛИТИЧЕСКИМ ДЕЙСТВИЕМ | 2001 |
|
RU2177796C1 |
| БЕЛЯЕВСКИЙ Л.С | |||
| и др | |||
| Основы радиолокации | |||
| Москва, Транспорт, 1982, с.90-92, рис.3.20. | |||

