Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления электрической нагрузкой или установкой, на которую подается электроэнергия переменного тока по протяженной линии передачи. Нагрузка или установка могут получать электропитание от контроллера электродвигателя, такого как источник питания с регулируемой частотой, инвертор с регулируемой частотой или преобразователь. В частности, данные компоненты предпочтительно применять для управления электрической нагрузкой или установкой в устройстве для осуществления производственных, распределительных и/или обрабатывающих процессов в оборудовании нефтегазовой промышленности.
Уровень техники
При передаче электроэнергии переменного тока по распределенным линиям в системах электроснабжения, электрическая нагрузка потребителя (установка или иная нагрузка) оказывает сильное влияние на напряжение на стороне потребителя. Примером протяженной линии электропередачи является кабель длиной несколько километров, соединяющий наземный источник питания с трансформатором или электродвигателем насоса, входящим в состав оборудования морской установки. В области разведки и добычи нефти и газа такого рода нагрузки и установки могут находиться, например, на грунте морского дна в десятках километров от суши или от верхних строений платформы. В состав установок по добыче или транспорту нефти и газа, применяемых под водой и на грунте морского дна на глубине свыше 1000 метров, может входить такое электрооборудование как подводный многофазный насос, насос-мультипликатор давления или подводный компрессор.
При большой протяженности силового кабеля и/или высокой частоте сигнала напряжение в еще более значительной степени зависит от электрической нагрузки потребителя или потребляющего блока, при этом невозможно удерживать напряжение в допустимых пределах без применения следующих активных средств:
1) активное управление напряжением на выводах электродвигателя на основе полученных данных обратной связи по напряжению двигателя и путем регулирования напряжения на передающем конце кабеля;
2) управление реактивной мощностью путем установки реакторов на передающем конце или приемном конце кабеля, быстродействующей регулируемой статической компенсации реактивной мощности или посредством прочего подобного оборудования.
Одним из подходов к решению данной задачи является измерение напряжения на передающем конце, то есть на стороне нагрузки, и использование этих данных обратной связи для управления напряжением в замкнутом контуре регулирования. Однако это может быть труднореализуемым и дорогостоящим решением, особенно для подводных систем, ввиду того, что приводит к необходимости установки под водой дополнительного оборудования. Другая техническая трудность состоит в необходимости нарушения герметичности подводного оборудования для ввода измерительного канала системы управления преобразователем. Технические аспекты попадания морской воды и действия давления воды в отношении устанавливаемого оборудования требуют дополнительной проработки. Таким образом, подобное решение задачи может создавать дополнительные технические трудности и сопряжено с вопросами надежности системы в плане отказоустойчивости ее элементов.
В документе JP 5122806 описан способ управления линейным синхронным электродвигателем железнодорожного транспортного средства. Способ включает расчет поправки на падение напряжения в зависимости от протяженности питающей линии, соответствующей местоположению транспортного средства.
В документе US 2009/0256519 предложены способ и программа компенсации потерь в кабеле электрической системы погружного насоса. В данном документе описана система с электроприводом погружного насоса для скважин. Питание насоса поступает от контроллера напряжения, получающего данные от датчика тока, на основе которых контроллер рассчитывает падение напряжения как произведение тока и полного сопротивления кабеля и регулирует выходную мощность источника питания.
Раскрытие изобретения
Целью настоящего изобретения является решение одной или нескольких вышеупомянутых задач. Данная цель и другие цели достигаются путем осуществления способа, характеризуемого пунктом 1 формулы изобретения.
Первый аспект изобретения состоит в том, что предложен способ управления установкой или электрической нагрузкой, на которую подается электроэнергия от контроллера частотно-регулируемого электропривода по протяженной линии передачи электроэнергии переменного тока, при этом, согласно способу, на вышеуказанную нагрузку или установку от вышеуказанного контроллера частотно-регулируемого электропривода подается электроэнергия переменного тока с фактически постоянным отношением напряжения к частоте, полученным по результатам расчета или измерения тока или напряжения (Vconv) на выходе вышеуказанного контроллера электропривода, при этом вышеуказанный способ включает вычисление расчетного напряжения (Vm_est) на выводах вышеуказанной установки или электрической нагрузки и добавление разницы между расчетным и выходным значениями для управления контроллером электропривода с целью обеспечения постоянного отношения напряжения к частоте на выводах вышеуказанной нагрузки или установки на основе расчетного напряжения на выводах.
Согласно варианту осуществления изобретения, предложен способ управления установкой или электрической нагрузкой, на которую подается электроэнергия от контроллера частотно-регулируемого электропривода по протяженной линии передачи электроэнергии переменного тока, при этом, согласно способу, вычисляется или моделируется расчетное напряжение (Vm_est) на выводах вышеуказанной установки или электрической нагрузки и добавляется разница между расчетным и выходным значениями для управления контроллером электропривода с целью обеспечения фактически постоянного отношения напряжения к частоте на выводах вышеуказанной нагрузки или установки на основе расчетного напряжения на выводах, причем вышеуказанный способ также включает вычисление расчетного тока и напряжения на выходе вышеуказанного контроллера электропривода на основе отношения внутреннего напряжения преобразователя и напряжения модулятора, служащего основой для преобразования координат abc/dq.
Согласно другому варианту осуществления изобретения, предложен способ управления установкой или электрической нагрузкой, на которую подается электроэнергия от контроллера электропривода по протяженной линии передачи электроэнергии переменного тока, при этом, согласно способу, вышеуказанная нагрузка или установка получает от вышеуказанного контроллера электропривода электроэнергию переменного тока с фактически постоянным отношением напряжения к частоте, причем способ включает вычисление или моделирование расчетного напряжения (Vm_est) на выводах вышеуказанной установки или электрической нагрузки и добавление разницы между расчетным и выходным значениями для управления контроллером электропривода с целью обеспечения вышеуказанного постоянного отношения напряжения к частоте на выводах вышеуказанной нагрузки или установки на основе расчетного напряжения на выводах, причем вышеуказанный способ далее включает получение разницы между расчетным напряжением (Vm_est) и выходным напряжением (Vconv) и передачу этой величины в контроллер суммирования напряжения, предназначенный для управления контроллером частотно-регулируемого электропривода и компенсирования этой разницы, с целью обеспечения вышеуказанного постоянного отношения напряжения к частоте на выводах вышеуказанной установки или электрической нагрузки.
Согласно другому варианту осуществления изобретения, предложен способ управления установкой или электрической нагрузкой, на которую подается электроэнергия от контроллера частотно-регулируемого электропривода по протяженной линии передачи электроэнергии переменного тока, при этом, согласно способу, вычисляется расчетное напряжение (Vm_est) на выводах вышеуказанной установки или электрической нагрузки и добавляется разница между расчетным и выходным значениями для управления контроллером частотно-регулируемого электропривода с целью обеспечения фактически постоянного отношения напряжения к частоте на выводах вышеуказанной нагрузки или установки на основе расчетного напряжения на выводах, причем вышеуказанный способ также включает вычисление расчетного напряжения (Vm_est) и расчетного тока на выводах вышеуказанной установки или электрической нагрузки и предоставление одного или нескольких результатов расчета тока на выводах установки для процесса управления контроллером частотно-регулируемого электропривода или его непрерывного контроля.
Согласно другому варианту осуществления изобретения, предложен способ управления установкой или электрической нагрузкой, на которую подается электроэнергия от контроллера частотно-регулируемого электропривода по протяженной линии передачи электроэнергии переменного тока, при этом, согласно способу, вычисляется расчетное напряжение (Vm_est) на выводах вышеуказанной установки или электрической нагрузки и добавляется разница между расчетным и выходным значениями для управления контроллером частотно-регулируемого электропривода с целью обеспечения фактически постоянного отношения напряжения к частоте на выводах вышеуказанной нагрузки или установки на основе расчетного напряжения на выводах, причем вышеуказанный способ также включает вычисление одного или нескольких расчетных значений тока на выводах установки и сравнение расчетных значений тока с заранее определенными пределами тока с целью обеспечения тепловой защиты установки или электрической нагрузки.
Согласно другому варианту осуществления изобретения, предложен способ управления установкой или электрической нагрузкой, на которую подается электроэнергия от контроллера частотно-регулируемого электропривода по протяженной линии передачи электроэнергии переменного тока, при этом, согласно способу, вычисляется расчетное напряжение (Vm_est) на выводах вышеуказанной установки или электрической нагрузки и добавляется разница между расчетным и выходным значениями для управления контроллером частотно-регулируемого электропривода с целью обеспечения фактически постоянного отношения напряжения к частоте на выводах вышеуказанной нагрузки или установки на основе расчетного напряжения на выводах, причем вышеуказанный способ также включает вычисление одного или нескольких расчетных значений тока на выводах установки и сравнение расчетных значений тока с заранее определенными пределами тока и получение данных в зависимости от результатов сравнения с параметрами процесса управления вышеуказанного контроллера электропривода с целью обеспечения тепловой защиты установки или электрической нагрузки.
В ходе исследовательских работ в рамках проекта по освоению нефтегазовых месторождений в Северном море у побережья Норвегии изобретателем было выработано решение вышеописанных задач, которое включает расчет или вычисление напряжения и тока на выводах установки (сторона нагрузки) на основе вычисленных и измеренных в преобразователе выходных значений тока и напряжения преобразователя. Данное расчетное напряжение на выводах установки используется в качестве обратной связи для контроллера суммирования напряжения, входящего в состав преобразователя, при управлении выходным напряжением преобразователя с целью обеспечения постоянного отношения напряжения к частоте на выводах электродвигателя. Это решение не требует наличия информации об установке и также может применяться для других электрических нагрузок, так как данные о нагрузке не используются в вычислениях.
В алгоритме или модели используется отношение внутреннего напряжения преобразователя и напряжения модулятора, служащее основой для преобразования координат abc/dq. Далее вычисляются и фильтруются составляющие выходного тока преобразователя в системе координат dq, так как при фильтрации этих составляющих (сигналов постоянного тока) устраняется фазовый сдвиг.
Вычислитель напряжения и тока электродвигателя требует параметризации электрическими данными повышающих или понижающих трансформаторов и кабеля. Более подробно параметризация описана ниже.
Другой аспект изобретения состоит в том, что предложен источник питания в виде контроллера частотно-регулируемого электропривода, предназначенный для передачи электроэнергии на установку или электрическую нагрузку, при этом электроэнергия от вышеуказанного источника питания передается по протяженному кабелю передачи электроэнергии переменного тока, которая передается на вышеуказанную установку или электрическую нагрузку при фактически постоянном отношении напряжения к частоте, при этом вышеуказанный контроллер частотно-регулируемого электропривода содержит электрическую цепь расчета для расчета и/или измерения выходных значений тока и напряжения (Vconv) в вышеуказанном контроллере электропривода, который характеризуется тем, что в нем имеется электрическая цепь вычисления для вычисления расчетного значения напряжения на выводах вышеуказанной установки или электрической нагрузки и электрическая цепь сравнения для сравнения выходного значения напряжения (Vconv) с расчетным значением напряжения (Vm_est) на выводах установки с целью определения разницы между ними, причем вышеуказанный контроллер частотно-регулируемого электропривода далее предназначен для компенсирования этой разницы и управления выходом контроллера с целью обеспечения постоянного отношения напряжения к частоте на выводах вышеуказанной установки или электрической нагрузки на основе расчетного напряжения (Vm_est).
Согласно варианту осуществления изобретения, предложен источник питания в виде контроллера частотно-регулируемого электропривода, предназначенный для передачи электроэнергии на установку или электрическую нагрузку, при этом вышеуказанный контроллер частотно-регулируемого электропривода содержит электрическую цепь расчета для моделирования и/или измерения тока и напряжения (Vconv) на выходе вышеуказанного контроллера электропривода, вышеуказанный контроллер электропривода содержит электрическую цепь вычисления для вычисления расчетного значения напряжения на выводах вышеуказанной установки или электрической нагрузки и электрическую цепь сравнения для сравнения выходного значения напряжения (Vconv) с расчетным значением напряжения (Vm_est) на выводах установки с целью определения разницы между ними, причем в вышеуказанной электрической цепи расчета для вычисления расчетного тока и напряжения на выходе вышеуказанного контроллера электропривода используется отношение внутреннего напряжения преобразователя и напряжения модулятора, служащее основой для преобразования координат abc/dq.
Согласно другому варианту осуществления изобретения, предложен источник питания в виде контроллера частотно-регулируемого электропривода, предназначенный для передачи электроэнергии на установку или электрическую нагрузку, при этом электроэнергия передается на вышеуказанную установку или электрическую нагрузку при фактически постоянном отношении напряжения к частоте, при этом вышеуказанный контроллер частотно-регулируемого электропривода содержит электрическую цепь расчета для расчета и/или измерения тока и напряжения (Vconv) на выходе вышеуказанного контроллера электропривода, в вышеуказанном контроллере электропривода имеется электрическая цепь вычисления для вычисления расчетного значения напряжения на выводах вышеуказанной установки или электрической нагрузки и электрическая цепь сравнения для сравнения выходного значения напряжения (Vconv) с расчетным значением напряжения (Vm_est) на выводах установки с целью определения разницы между ними, причем имеется контроллер суммирования напряжения для компенсирования разницы между выходным значением напряжения (Vconv) вышеуказанного контроллера электропривода и расчетным значением напряжения (Vm_est) на выводах, предназначенный для управления контроллером электропривода на основе вышеуказанной разницы и обеспечения вышеуказанного постоянного отношения напряжения к частоте на выводах вышеуказанной установки или электрической нагрузки.
Согласно другому варианту осуществления изобретения, предложен источник питания в виде контроллера частотно-регулируемого электропривода, предназначенный для передачи электроэнергии на установку или электрическую нагрузку, при этом электроэнергия передается на вышеуказанную установку или электрическую нагрузку при фактически постоянном отношении напряжения к частоте, при этом вышеуказанный контроллер частотно-регулируемого электропривода содержит электрическую цепь расчета для расчета и/или измерения тока и напряжения (Vconv) на выходе вышеуказанного контроллера электропривода, в вышеуказанном контроллере электропривода имеется электрическая цепь вычисления для вычисления расчетного значения напряжения на выводах вышеуказанной установки или электрической нагрузки и электрическая цепь сравнения для сравнения выходного значения напряжения (Vconv) с расчетным значением напряжения (Vm_est) на выводах установки с целью определения разницы между ними, причем вышеуказанная электрическая цепь расчета или процесс для вычисления расчетного значения напряжения (Vm_est) и тока на выводах вышеуказанной установки или электрической нагрузки предназначены для предоставления одного или нескольких результатов расчета тока на выводах установки для процесса управления вышеуказанным контроллером электропривода или его непрерывного контроля.
Согласно другому варианту осуществления изобретения, предложен источник питания в виде контроллера частотно-регулируемого электропривода, предназначенный для передачи электроэнергии на установку или электрическую нагрузку, при этом электроэнергия передается на вышеуказанную установку или электрическую нагрузку при фактически постоянном отношении напряжения к частоте, при этом вышеуказанный контроллер частотно-регулируемого электропривода содержит электрическую цепь расчета для расчета и/или измерения тока и напряжения (Vconv) на выходе вышеуказанного контроллера электропривода, в вышеуказанном контроллере электропривода имеется электрическая цепь вычисления для вычисления расчетного значения напряжения на выводах вышеуказанной установки или электрической нагрузки и электрическая цепь сравнения для сравнения выходного значения напряжения (Vconv) с расчетным значением напряжения (Vm_est) на выводах установки с целью определения разницы между ними, причем вышеуказанный контроллер частотно-регулируемого электропривода содержит электрическую цепь расчета или осуществляет процесс для вычисления одного или нескольких результатов расчета тока на выводах установки и предоставления расчетных значений для сравнения одной или нескольких расчетных значений тока с заранее определенными пределами тока с целью обеспечения тепловой защиты установки или электрической нагрузки.
Другой аспект изобретения охватывает компьютерную программу, компьютерную программу, хранящуюся в запоминающем устройстве, и компьютерную программу, записанную на машиночитаемом носителе информации, предназначенную для использования с блоком обработки, имеющим внутреннее запоминающее устройство, в которое может загружаться компьютерная программа или компьютерный программный продукт, содержащий фрагменты программного кода.
Краткое описание графических материалов
Для более глубокого понимания сути способа и устройства системы, предлагаемых в настоящем изобретении, можно обратиться к нижеприведенному подробному описанию, данному со ссылками на соответствующие чертежи.
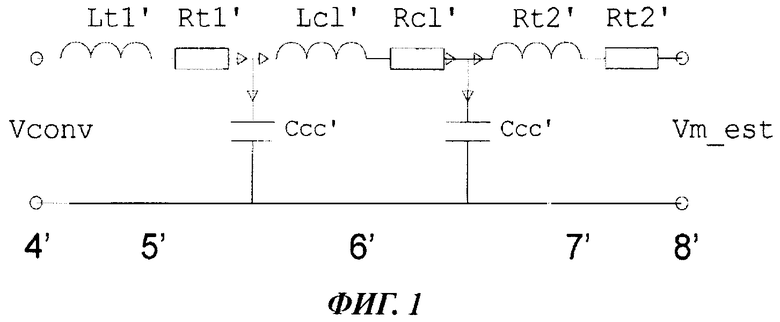
Фиг.1 показывает структуру модели электрической цепи, используемой в способе для вычисления напряжения на выводах установки, согласно варианту осуществления изобретения.
Фиг.2 показывает изобретение, изображенное на фиг.1, и, в частности, электрическую схему, посредством которой реализуется способ, соответствующий варианту осуществления изобретения.
Фиг.3 показывает изобретение, изображенное на фиг.1, в виде упрощенного рисунка и иллюстрирует, в частности, пространственную конфигурацию электрической цепи, согласно варианту осуществления изобретения.
Фиг.4 показывает изобретение, изображенное на фиг.1, и иллюстрирует, в частности, блок-схему алгоритма способа, соответствующего варианту осуществления изобретения.
Осуществление изобретения
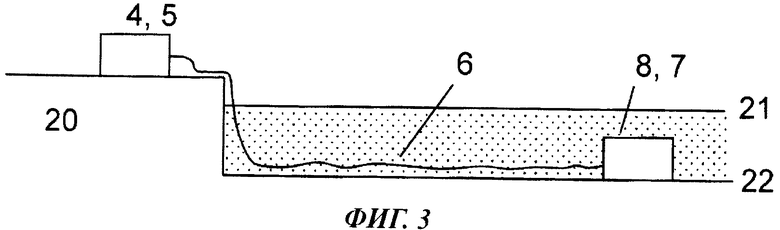
На фиг.2 приведена электрическая схема с основными компонентами, используемыми для осуществления изобретения. На схеме слева направо приведены следующие упрощенные обозначения компонентов: источник 10 питания, входной трансформатор 11, преобразователь 4, являющийся частотно-регулируемым силовым преобразователем/инвертором, и трансформатор 5, представляющий собой повышающий трансформатор. Трансформатор 5 соединен с протяженной линией передачи электроэнергии или кабелем 6, являющимся в данном примере осуществления изобретения высоковольтной линией напряжением 40 кВ и выше. Протяженная высоковольтная линия 6 далее соединена с трансформатором 7, представляющим собой понижающий трансформатор, который затем соединен с установкой 8 или нагрузкой, потребляющей электроэнергию и работающей в данном примере в диапазоне 4-6 кВ.
Таким образом, электроэнергия подводится к силовому преобразователю/инвертору, который также может рассматриваться как частотно-регулируемый электропривод, передающий электроэнергию переменного тока высокого напряжения после повышения напряжения первым трансформатором 5 на стороне преобразователя по протяженной линии 6 на установку 8 через второй трансформатор 7, понижающий напряжение на стороне установки.
Способ осуществляется путем вычисления прогнозируемого напряжения на выводах установки, меняющегося в зависимости от нагрузки установки 8 или другой электрической нагрузки. Для вычисления (расчета) напряжения на стороне установки может использоваться упрощенная модель электрической цепи. Далее, производится компенсация сигнала на выходе контроллера электропривода для учета рассчитанного отклонения напряжения на выводах установки, возникающего вследствие колебаний нагрузки.
На фиг.1 показана упрощенная модель распределения нагрузки для контроллера электродвигателя, соединенного с установкой или нагрузкой протяженной линией передачи электроэнергии переменного тока. На фиг.1 слева направо показаны напряжение преобразователя Vconv, а также активное сопротивление и индуктивность повышающего трансформатора 5. На второй части модели показаны емкости, активное сопротивление и индуктивность протяженного кабеля 6. В правой части модели показаны активное сопротивление и индуктивность понижающего трансформатора 7, а также расчетное напряжение Vm_est на стороне установки 8. Указаны следующие параметры:
Rt1 - активное сопротивление повышающего трансформатора (удельное);
Lt1 - индуктивность повышающего трансформатора (уд.);
Ссс - емкость кабеля, деленная пополам (уд.);
Rc1 - активное сопротивление кабеля (уд.);
Lc1 - индуктивность кабеля (уд.);
Rt2 - активное сопротивление понижающего трансформатора (удельное);
Lt2 - индуктивность понижающего трансформатора (уд.).
Предпочтительный период вычисления параметров упрощенной модели распределения нагрузки составляет 1 мс, а полученное расчетное напряжение затем используется при формирования фактической обратной связи для организации компенсации отклонений напряжения посредством контроллера суммирования напряжения контроллера 4 электродвигателя, также называемого контроллером электропривода. Результаты имитационного моделирования, вычислений и проверок, полученные при проведении маломасштабных и полномасштабных испытаний на полигонах и на рабочих участках, показали перспективность применения изобретения в отношении эксплуатационных характеристик контроллера суммирования напряжения и устройства расчета напряжения. Размерные величины, использованные в вычислениях и испытаниях, рассчитаны для силового преобразователя, предназначенного для подачи по подводному кабелю электроэнергии на нагрузку, расположенную приблизительно в 50 километрах от суши. В одном из примеров электроэнергия передавалась на подводный компрессор нефтегазовой установки. Обычно такого рода протяженные линии или кабели предназначены для электроснабжения подводного оборудования, расположенного на грунте морского дна на глубине до 3000 метров. Подводные установки, такие как многофазный насос, предназначены для непрерывной работы в течение нескольких месяцев или лет. Подобные насосы или компрессоры обычно перекачивают смеси нефти и горюче-смазочных материалов. Плотность смесей нефти и горюче-смазочных материалов может непредсказуемо меняться, что приводит к непрогнозируемым изменениям нагрузки насоса или другой установки. Описанное здесь решение характеризуется положительным эффектом, который состоит в отсутствии необходимости формирования фактической обратной связи по напряжению в удаленных системах, находящихся за пределами разрабатываемого участка и получающих электроэнергию по протяженным кабелям. Данное решение может также избавить от необходимости установки реактора на стороне подводного оборудования со сверхдлинными кабелями, при наличии которого было бы проблематично обеспечить стабильность напряжения вследствие емкостного эффекта (эффекта Ферранти).
В контроллере электропривода, частотно-регулируемом электроприводе или преобразователе 4 могут быть реализованы нижеследующие формулы.
Составляющие тока в системе координат dq (ось d совпадает с направлением вектора напряжения преобразователя):
Id - составляющая тока, совпадающая по фазе с напряжением преобразователя (ось d),
Iq - составляющая тока, сдвинутая на 90 градусов относительно напряжения преобразователя (ось q).
Далее указаны выражения в системе координат dq.
Ниже приведены формулы для параметров повышающего трансформатора 5.
Выходное напряжение повышающего трансформатора в системе координат dq:
Ut1d=Ucd-Icd*Rt1+Icq*ω*Lt1,
Ut1q=Ucq-Icq*Rt1-Icd*ω*Lt1.
Емкостный ток утечки кабеля в системе координат dq, протекающий по кабелю через Ссс на стороне преобразователя:
I2d=-Ut1q*ω*Ccc,
I2q=Ut1d*ω*Ccc.
Ток утечки в системе координат dq, протекающий через Lc1 и Rc1 в модели кабеля:
I3d=Icd-I2d,
I3q=Icq-I2q.
Ниже приведены формулы для параметров понижающего трансформатора 7.
Напряжение понижающего трансформатора в системе координат dq:
Ut2d=Ut1d-I3d*Rc1+I3q*ω*Lc1,
Ut2q=Ut1q-I3q*Rc1-I3d*ω*Lc1.
Емкостный ток утечки кабеля в системе координат dq, протекающий по кабелю через Ссс на стороне электрической нагрузки:
I4d=-Ut2q*ω*Ссс,
I4q=Ut2d*ω*Ссс.
Ток электродвигателя или электрической нагрузки в системе координат dq:
I5x=I3x-I4x,
I5y=I3y-I4y.
Ниже приведены формулы напряжения и тока установки 8,
Напряжение электродвигателя или электрической нагрузки в системе координат dq:
Umd=Ut2d-I5d*Rt2+I5q*ω*Lt2,
Umq=Ut2q-I5q*Rt2-I5d*ω*Lt2.
Абсолютный вектор напряжения электродвигателя или электрической нагрузки:
Um_abs=(sqrt((Umx^2)+(Umy^2)))sqrt(3),
Абсолютный вектор тока электродвигателя или электрической нагрузки:
Im_abs=sqrt((I5x^2)+(I5y2)),
где
Ucd - составляющая удельного напряжения преобразователя по оси d,
Icd - составляющая удельного тока преобразователя по оси d,
Icq - составляющая удельного тока преобразователя по оси q,
ω - фактическая удельная угловая частота переменного тока.
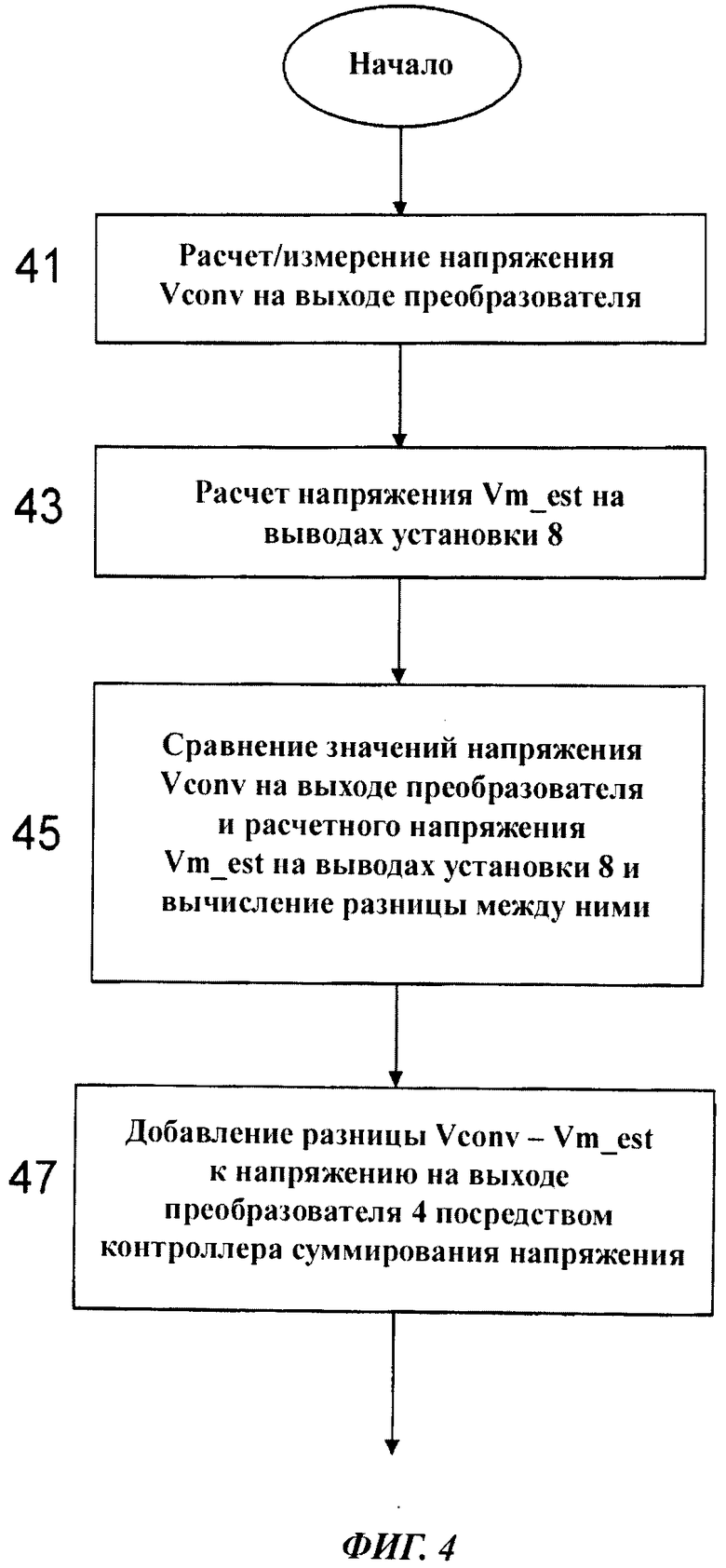
На фиг.3 приведен упрощенный эскиз системы передачи электроэнергии от источника питания, находящегося на суше 20, на установку 8, расположенную в море 21, в многокилометровом удалении от суши. В данном примере установка 8 или нагрузка расположена на грунте 22 морского дна, однако установка или нагрузка в равной степени может находиться как под водой, так и, например, на плавучей платформе, судне и т.п. На чертеже показано, что повышающий трансформатор 5 находится в общем корпусе с частотно-регулируемым электроприводом 4, а понижающий трансформатор 7 - в одном корпусе с установкой 8 или нагрузкой под водой, однако каждый из этих трансформаторов может быть установлен как автономный блок, так и внутри корпуса другого оборудования.
На фиг.4 показана блок-схема алгоритма способа, соответствующего варианту осуществления изобретения, согласно которому выполняются следующие действия:
41) расчет и/или измерение напряжения Vconv на выходе контроллера электропривода или преобразователя 4;
43) вычисление напряжения Vm_est на выводах установки 8 или другой электрической нагрузки;
45) сравнение значений выходного напряжения Vconv преобразователя и расчетного напряжения Vm_est на выводах электродвигателя и установление разницы между ними;
47) добавление разницы между значениями выходного напряжения Vconv преобразователя и расчетного напряжения Vm_est на выводах электродвигателя к выходному напряжению преобразователя, например, посредством контроллера суммирования напряжения, для компенсирования этой разницы.
В описанном примере рассматривается подача электроэнергии по протяженной линии на установку, расположенную в море. Однако изобретение также может применяться для подачи электроэнергии на наземную установку или электрическую нагрузку нефте- или газопровода, для которой требуется подвод питания по протяженному кабелю переменного тока, вследствие чего происходят колебания нагрузки/частоты напряжения на выводах установки/нагрузки. Полезный эффект от применения варианта осуществления настоящего изобретения может достигаться при подаче электроэнергии на двигатели компрессорного оборудования трубопроводов.
Полученные данные и результаты измерения, в том числе такие электрические величины как сопротивление, индуктивность, емкость некоторых компонентов, в частности, трансформаторов 5, 7 и кабеля 6, могут храниться в базе данных или в перечне данных. База данных может находиться в постоянном запоминающем устройстве блока управления, входящего в состав контроллера электропривода, или подключаемого к нему. База данных может входить в состав встроенных программных средств.
В другом варианте осуществления изобретения способ включает расчет (вычисление) обоих значений напряжения и тока на выводах установки (стороны электрической нагрузки) на основе вычисленных и измеренных в преобразователе выходных значений тока и напряжения преобразователя. Предпочтительно, что вычисленное значение тока используется в обратной связи по току для токоограничения в преобразователе 4 и предотвращения тепловой перегрузки установки 8, так как в удаленных системах, находящихся за пределами разрабатываемого участка и получающих электроэнергию по сверхдлинным кабелям, среднеквадратическое значение тока на выходе преобразователя может несколько меняться при переходе от режима холостого хода к режиму полной нагрузки, при этом обычный предел токоограничения преобразователя не обеспечил бы необходимой тепловой защиты установки от перегрузки по току. В предельно удаленных от разрабатываемого участка системах ток на выходе преобразователя может отличаться от тока, получаемого на стороне нагрузки. В данном варианте осуществления изобретения при проведении имитационного моделирования и испытаний в качестве входной величины для токоограничения контроллера электродвигателя (контроллера электропривода) был выбран расчетный ток электродвигателя. В предпочтительном варианте осуществления изобретения в качестве преобразователя/инвертора может использоваться привод переменного тока серии ACS 5000 производства компании «АББ».
Способы расчета напряжения (и/или напряжения и тока) на выводах установки, описанные в данном документе, могут быть реализованы компьютерными средствами, включающими фрагменты компьютерной программы или программный код, который после загрузки в процессор или компьютер осуществляет выполнение стадий способа посредством процессора или компьютера. Функции электрической цепи расчета могут быть реализованы путем применения цифровой обработки, алгоритмов и/или компьютерных программ и/или посредством аналоговых компонентов или аналоговых электрических цепей, а также при помощи сочетания аналоговых и цифровых средств. Электрическая цепь расчета может входить в состав аппаратных средств или конфигурируемых аппаратных средств, например, программируемой пользователем вентильной матрицы (ППВМ) или других процессорных устройств, например, сложной программируемой логической интегральной схемы (ПЛИС) или специализированной интегральной схемы (СИС).
Вышеописанные стадии способа, соответствующие изобретению и показанные на фиг.4, могут осуществляться посредством одной или нескольких компьютерных программ, содержащих программный код или фрагменты программных средств, реализуемые компьютером или процессором. Такой процессор может быть оборудован запоминающим устройством блока управления технологическим процессом или блока управления электродвигателем, или контроллера суммирования напряжения, или другой части системы управления электродвигателем. Фрагмент программы или программные средства, осуществляющие стадии способа, могут не только храниться в процессоре, как описано выше, но и содержаться в микросхемах ПЗУ, ОЗУ, ППЗУ, ЭППЗУ или ЭСППЗУ или тому подобных средствах хранения данных. Вся программа или ее часть также может храниться в виде встроенных программных средств на соответствующем читаемом компьютером носителе информации, например, на магнитном диске, магнитооптическом ЗУ, энергонезависимом ЗУ, флэш-ПЗУ, а также на сервере данных, на одном или нескольких серверах массива данных, или на съемном носителе информации, таком как флэш-ПЗУ, жесткий диск и т.п. Доступ к данным может осуществляться посредством любого из следующих устройств: устройство, использующее интерфейс ОРС, серверы ОРС, брокер объектных запросов, например, СОМ, DCOM или CORBA, web-служба.
Сведения в данном документе приведены для примера, в котором рассмотрен контроллер электропривода и, в частности, силовой преобразователь, однако изобретение не ограничивается данным типом регулируемого устройства подачи электроэнергии. Кроме того, может применяться преобразователь с управлением ШИМ-сигналами (ШИМ - широтно-импульсная модуляция), с управлением АИМ-сигналами (АИМ - амплитудно-импульсная модуляция), с тиристорным управлением в системе подчиненного регулирования.
Несмотря на приведенное выше описание вариантов осуществления изобретения, в отношении настоящего изобретения возможны разные вариации и модификации способа управления установкой или электрической нагрузкой, на которую подается электроэнергия переменного тока по протяженной линии передачи, без отклонения от сущности настоящего изобретения, изложенной в прилагаемой формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивной компенсации высших гармоник в электрической сети переменного напряжения | 2020 |
|
RU2749523C1 |
| СПОСОБ И СИСТЕМА ПАРАЛЛЕЛЬНОГО УПРАВЛЕНИЯ ДЛЯ ОДНОФАЗНЫХ ИНВЕРТОРОВ И ИНВЕРТОР | 2019 |
|
RU2756177C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| ЭЛЕКТРИЧЕСКАЯ ДИЗЕЛЬ-ГЕНЕРАТОРНАЯ СТАНЦИЯ ДЛЯ ПЕРЕГОНА ГОРНЫХ МАШИН | 2022 |
|
RU2790609C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ВРАЩАЮЩЕЙСЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2491692C2 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ МОЩНОСТИ НА ЛИНИИ ДЛЯ УСТРОЙСТВА КОМПЛЕКСНОГО РЕГУЛИРОВАНИЯ ПЕРЕТОКОВ МОЩНОСТИ | 2015 |
|
RU2663820C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ ГРЕБНОГО ЭЛЕКТРОПРИВОДА И ГРЕБНОЙ ЭЛЕКТРОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2489311C2 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ КОРОТКОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ И ВЫЧИСЛЕНИЯ ЕГО СОПРОТИВЛЕНИЯ | 2001 |
|
RU2263925C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2815590C1 |
| ЗАРЯДНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМОБИЛЕЙ С НЕСКОЛЬКИМИ ИСТОЧНИКАМИ ЭНЕРГИИ | 2024 |
|
RU2831526C1 |
Настоящее изобретение относится к способу управления электрической нагрузкой или установкой, на которую подается электроэнергия переменного тока по протяженной линии передачи. Технический результат: упрощение системы, повышение её помехоустойчивости за счёт устранения необходимости формирования обратной связи по напряжению. Изобретение относится к контроллеру электропривода, предназначенному для передачи электрической энергии от источника питания к установке или нагрузке по кабелю протяженной линии электроэнергии переменного тока, длина которого исчисляется километрами. Контроллер электропривода содержит электрические цепи и/или характеризуется регулирующими процессами для выдачи сигнала переменного тока с постоянным отношением напряжения к частоте с целью управления указанной установкой и нагрузкой. Независимо от наличия колебаний напряжения и/или частоты, изначально вызываемых нагрузкой, контроллер электропривода поддерживает на выводах установки определенные значения напряжения и частоты путем быстродействующего изменения выходного сигнала преобразователя в зависимости от нагрузки установки или иной нагрузки на основе расчета напряжения и тока на выводах установки и соответствующего регулирования сигнала на выходе контроллера электропривода. 4 н. и 12 з.п. ф-лы, 4 ил.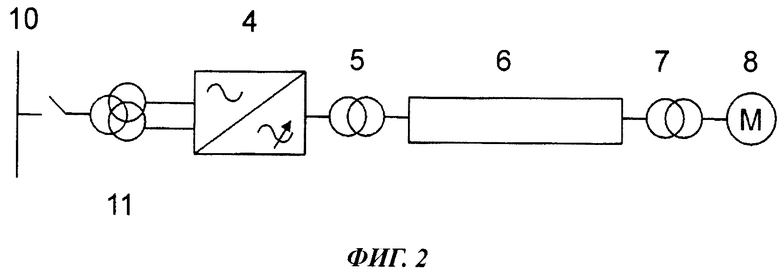
1. Способ управления установкой (8) или электрической нагрузкой, на которую подается электроэнергия от контроллера (4) электропривода по кабелю (6) протяженной линии электроэнергии переменного тока, причем указанным контроллером электропривода управляют таким образом, чтобы на указанную нагрузку или установку подавалась электроэнергия переменного тока при по существу постоянном отношении напряжения к частоте, полученном по результатам расчета или измерения тока и напряжения (Vconv) на выходе контроллера (4) электропривода, отличающийся тем, что включает вычисление расчетного напряжения (Vm_est) на выводах указанной установки (8) или электрической нагрузки с применением упрощенной модели распределения нагрузки контроллера (4) электропривода, повышающего трансформатора (5), кабеля (6) протяженной линии электроэнергии переменного тока, понижающего трансформатора (7) и установки (8), причем расчетное напряжение определяют по абсолютному вектору напряжения электродвигателя или электрической нагрузки в системе координат dq:
Um_abs=(sqrt((Umx^2)+(Umy^2)))*sqrt(3),
где напряжение электродвигателя или электрической нагрузки в системе координат dq определяется выражениями:
Umd=Ut2d-I5d*Rt2+I5q*w*Lt2,
Umq=Ut2q-I5q*Rt2-I5d*w*Lt2,
где
Ut2d=Ut1d-I3d*Rc1+I3q*w*Lc1,
Ut2q=Ut1q-I3q*Rc1-I3d*w*Lc1
выражают составляющие напряжения понижающего трансформатора (7) в системе координат dq,
I5x=I3x-I4x,
I5y=I3y-I4y
выражают составляющие тока электродвигателя или электрической нагрузки в системе координат dq, Rt2 - активное сопротивление понижающего трансформатора (7), Lt2 - индуктивность понижающего трансформатора (7), w - фактическая удельная угловая частота переменного тока, Rc1 - активное сопротивление кабеля (6) протяженной линии электроэнергии переменного тока, Lc1 - индуктивность кабеля (6) протяженной линии электроэнергии переменного тока,
Ut1d=Ucd-Icd*Rt1+Icq*w*Lt1,
Ut1q=Ucq-Icq*Rt1-Icd*w*Lt1
выражают составляющие выходного напряжения повышающего трансформатора (5) в системе координат dq,
I2d=-Ut1q*w*Ccc,
I2q=Ut1d*w*Ccc
выражают составляющие емкостного тока утечки кабеля в системе координат dq, протекающего на стороне преобразователя по кабелю через емкость Ссс кабеля протяженной линии передачи электроэнергии переменного тока,
I3d=Icd-I2d,
I3q=Icq-I2q
выражают составляющие тока в системе координат dq, протекающего через индуктивность Lc1 кабеля,
I4d=-Ut2q*w*Ссс,
I4q=Ut2d*w*Ссс
выражают составляющие емкостного тока утечки кабеля в системе координат dq, протекающего по кабелю через емкость Ссс кабеля на стороне электрической нагрузки, Ucd - составляющая удельного напряжения преобразователя по оси d, Icd - составляющая удельного тока преобразователя по оси d, Icq - составляющая удельного тока преобразователя по оси q;
и добавляют разницу между расчетным и выходным значениями для управления контроллером электропривода с обеспечением постоянного отношения напряжения к частоте на выводах указанной нагрузки или установки для компенсации этой разницы на основе расчетного напряжения (Vm_est) на выводах и без необходимости формирования фактической обратной связи по напряжению.
2. Способ по п. 1, отличающийся тем, что включает вычисление расчетного тока и напряжения на выходе указанного контроллера (4) электропривода на основе отношения внутреннего напряжения преобразователя и напряжения модулятора, служащего основой для преобразования координат dq.
3. Способ по п. 1, отличающийся тем, что включает получение разницы между расчетным напряжением (Vm_est) и выходным напряжением (Vconv) и передачу этой величины в контроллер суммирования напряжения, предназначенный для управления контроллером (4) электропривода и компенсирования этой разницы, с целью обеспечения указанного постоянного отношения напряжения к частоте на выводах указанной установки (8) или электрической нагрузки.
4. Способ по п. 1, отличающийся тем, что включает вычисление расчетного напряжения (Vm_est) и расчетного тока на выводах указанной установки (8) или электрической нагрузки и предоставление одного или более результатов расчета тока на выводах установки для управления контроллером (4) электропривода или его непрерывного контроля.
5. Способ по п. 1 или 4, отличающийся тем, что включает вычисление одного или более расчетных значений тока на выводах установки и сравнение расчетных значений тока с заранее определенными пределами тока для обеспечения тепловой защиты установки (8) или электрической нагрузки.
6. Способ по п. 1 или 4, отличающийся тем, что включает вычисление одного или более расчетных значений тока на выводах установки, сравнение расчетных значений тока с заранее определенными пределами тока и получение данных в зависимости от результатов сравнения с параметрами процесса управления указанного контроллера электропривода для обеспечения тепловой защиты установки (8) или электрической нагрузки.
7. Контроллер (4) электропривода, предназначенный для передачи электроэнергии от источника питания (10) на установку (8) или электрическую нагрузку, при этом электроэнергия передается указанным контроллером электропривода по кабелю протяженной линии электроэнергии переменного тока, причем электроэнергия переменного тока передается на указанную установку или электрическую нагрузку при по существу постоянном отношении напряжения к частоте, при этом контроллер (4) электропривода содержит электрическую цепь расчета для расчета и/или измерения выходных значений тока и напряжения (Vconv) в указанном контроллере электропривода, отличающийся тем, что содержит электрическую цепь вычисления для вычисления расчетного значения напряжения на выводах указанной установки (8) или электрической нагрузки на основе упрощенной модели распределения нагрузки контроллера (4) электропривода, повышающего трансформатора (5), кабеля (6) протяженной линии электроэнергии переменного тока, понижающего трансформатора (7) и установки (8), причем расчетное напряжение определяется по абсолютному вектору напряжения электродвигателя или электрической нагрузки в системе координат dq:
Um_abs=(sqrt((Umx^2)+(Umy^2)))*sqrt(3),
где напряжение электродвигателя или электрической нагрузки в системе координат dq определяется выражениями:
Umd=Ut2d-I5d*Rt2+I5q*w*Lt2,
Umq=Ut2q-I5q*Rt2-I5d*w*Lt2,
где
Ut2d=Ut1d-I3d*Rc1+I3q*w*Lc1,
Ut2q=Ut1q-I3q*Rc1-I3d*w*Lc1
выражают составляющие напряжения понижающего трансформатора (7) в системе координат dq,
I5x=I3x-I4x,
I5y=I3y-I4y
выражают составляющие тока электродвигателя или электрической нагрузки в системе координат dq, Rt2 - активное сопротивление понижающего трансформатора (7), Lt2 - индуктивность понижающего трансформатора (7), w - фактическая удельная угловая частота переменного тока, Rc1 - активное сопротивление кабеля (6) протяженной линии электроэнергии переменного тока, Lc1 - индуктивность кабеля (6) протяженной линии электроэнергии переменного тока,
Ut1d=Ucd-Icd*Rt1+Icq*w*Lt1,
Ut1q=Ucq-Icq*Rt1-Icd*w*Lt1
выражают составляющие выходного напряжения повышающего трансформатора (5) в системе координат dq,
I2d=-Ut1q*w* Ссс,
I2q=Ut1d*w*Ccc
выражают составляющие емкостного тока утечки кабеля в системе координат dq, протекающего на стороне преобразователя по кабелю через емкость Ссс кабеля протяженной линии передачи электроэнергии переменного тока,
I3d=Icd-I2d,
I3q=Icq-I2q
выражают составляющие тока в системе координат dq, протекающего через индуктивность Lc1 кабеля,
I4d=-Ut2q*w*Ссс,
I4q=Ut2d*w*Ссс
выражают составляющие емкостного тока утечки кабеля в системе координат dq, протекающего по кабелю через емкость Ссс кабеля на стороне электрической нагрузки, Ucd - составляющая удельного напряжения преобразователя по оси d, Icd - составляющая удельного тока преобразователя по оси d, Icq - составляющая удельного тока преобразователя по оси q; и
электрическую цепь сравнения для сравнения выходного значения напряжения (Vconv) с расчетным значением напряжения (Vm_est) на выводах установки с целью определения разницы между ними, причем указанный контроллер (4) электропривода выполнен с возможностью компенсирования этой разницы и управления выходом контроллера для обеспечения постоянного отношения напряжения к частоте на выводах указанной установки (8) или электрической нагрузки на основе расчетного напряжения (Vm_est) и без необходимости формирования фактической обратной связи по напряжению.
8. Контроллер по п. 7, отличающийся тем, что указанная электрическая цепь расчета для вычисления расчетного тока и напряжения на выходе контроллера (4) электропривода использует отношение внутреннего напряжения преобразователя и напряжения модулятора, служащее основой для преобразования координат dq.
9. Контроллер по п. 7, отличающийся тем, что предусмотрен контроллер суммирования напряжения для компенсирования разницы между выходным значением напряжения (Vconv) контроллера (4) электропривода и расчетным значением напряжения (Vm_est) на выводах, предназначенный для управления контроллером электропривода на основе указанной разницы и обеспечения указанного постоянного отношения напряжения к частоте на выводах указанной установки (8) или электрической нагрузки.
10. Контроллер по п. 7, отличающийся тем, что указанная электрическая цепь расчета или процесс для вычисления расчетного значения напряжения (Vm_est) и тока на выводах указанной установки (8) или электрической нагрузки предназначены для предоставления одного или более результатов расчета тока на выводах установки для процесса управления контроллером (4) электропривода или его непрерывного контроля.
11. Контроллер по п. 7 или 9, отличающийся тем, что электрическая цепь расчета или процесс предназначены для вычисления одного или более результатов расчета тока на выводах установки и предоставления расчетных значений для сравнения в контроллере (4) электропривода одной или более расчетных значений тока с заранее определенными пределами тока с целью обеспечения тепловой защиты установки (8) или электрической нагрузки.
12. Контроллер по п. 7, отличающийся тем, что электрическая цепь расчета управляется программными средствами или программным кодом, предназначенными для выполнения функции расчета тока и напряжения на выводах установки (8) или электрической нагрузки, на которую подается электроэнергия от указанного контроллера электропривода.
13. Контроллер по п. 7, отличающийся тем, что имеется постоянное запоминающее устройство, в котором хранятся полученные и измеренные данные, в том числе электрические параметры компонентов, соединенных с контроллером (4) электропривода, включающие данные о трансформаторах (5, 7) и/или кабеле (6).
14. Контроллер по п. 7, отличающийся тем, что запоминающее устройство содержит фрагменты программного кода или компьютерного кода для осуществления способа по п. 1 посредством компьютера или процессора.
15. Машиночитаемый носитель информации, на котором записан компьютерный программный продукт, содержащий программный код или фрагменты программного кода, которые при считывании компьютером или процессором обеспечивают выполнение способа по п. 1 посредством компьютера или процессора.
16. Применение контроллера (4) электропривода, охарактеризованного в п. 10, для передачи электрической энергии от источника (10) питания на установку (8) или электрическую нагрузку, причем электроэнергия передается указанным контроллером электропривода по кабелю (6) протяженной линии электроэнергии переменного тока без измерения тока или напряжения на стороне нагрузки и указанный контроллер электропривода управляется таким образом, чтобы обеспечивать передачу электроэнергии переменного тока при постоянном отношении напряжения к частоте на указанную установку (8) или нагрузку для управления установкой (8) или электрической нагрузкой в оборудовании по добыче, транспортировке, распределению или обработке нефти и/или газа.
| US 20090256519 A1, 15.10.2009 | |||
| JP 5122806 A, 18.05.1993 | |||
| JP 63314134 A, 22.10.1988 | |||
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2302073C1 |

