Изобретение относится к землеройным и строительно-дорожным машинам на базе промышленных тракторов, в том числе к бульдозерам, рыхлителям, кусторезам, корчевателям, траншеезасыпателям, ямобурам, трубоукладчикам, траншейным экскаваторам и т.п.
Известен гусеничный трактор с электромеханической трансмиссией, содержащий тепловой двигатель, связанный с силовым генератором, два тяговых электродвигателя, кинематически связанных с гусеницами противоположных бортов, и систему управления, в состав которой входят преобразователь напряжения и микропроцессорный контроллер [1].
Его недостатком являются ограниченные функциональные возможности. Это обусловлено отсутствием реализации в его системе управления функций управления рабочим оборудованием, агрегатируемым с этим трактором.
Наиболее близким к предложенному является бульдозерно-рыхлительный агрегат на базе дизель-электрического трактора ДЭТ-250М2 с электромеханической трансмиссией, содержащие кинематически соединенный с двигателем внутреннего сгорания электрический генератор постоянного тока, подключенный к нему тяговый электродвигатель, выходной вал которого связан с осевым валом, соединенным с входными валами левого и правого механизмов поворота планетарного типа, выходные валы которых, в свою очередь, через бортовые редукторы связаны с ведущими звездочками гусеничной ходовой части трактора, а также систему электрооборудования трактора, гидравлическую систему приводов перемещения бульдозерного и рыхлительного оборудования и кабину с системами жизнеобеспечения и органами управления [2].
Недостатком этого тракторного агрегата является его пониженная надежность, что обусловлено применением гидравлических приводов рабочего оборудования, имеющих, по сравнению с электромеханическими приводами, более низкую надежность ввиду наличия рабочей жидкости и необходимости прокладки гидравлических магистралей к гидроцилиндрам, расположенным на подвижных рабочих органах. Нарушение герметичности любого гидравлического компонента, вследствие применения объединенной гидросистемы управления рабочим оборудованием с общим гидробаком, приводит к потере рабочей жидкости во всей гидравлической системе и к нарушению работоспособности всех приводов. К пониженной надежности этого тракторного агрегата приводит также применение коллекторных электромашин и отсутствие систем централизованной смазки и автоматического натяжения гусениц ходовой части трактора.
Техническим результатом, на достижение которого направлено изобретение во всех вариантах его реализации, является повышение надежности работы промышленного тракторного агрегата с электромеханической трансмиссий.
В предложенном гусеничном тракторном агрегате, содержащем двигатель внутреннего сгорания (ДВС), связанный с ним силовой генератор, один или два тяговых электродвигателя, кинематически связанных с гусеницами через бортовые редукторы, кабину с органами управления, рабочее оборудование с приводами его поступательного и/или вращательного перемещения, а также систему электрооборудования, указанный технический результат достигается за счет того, что силовой генератор формирует многофазное переменное напряжение повышенной частоты (не менее 100 Гц), а система электрооборудования содержит выпрямитель этого напряжения, причем, по меньшей мере, один привод рабочего оборудования или вала отбора мощности выполнен электромеханическим или электрогидростатическим, а цепи его силового электрического питания подключены к силовому генератору или выпрямителю.
Дополнительно в промышленном тракторном агрегате, для достижения указанного технического результата, в частности:
- используются приводы рабочего оборудования, по меньшей мере, двух видов, различающихся способом передачи движения, - электромеханический, гидравлический, гидромеханический, электрогидравлический или электрогидростатический;
- электрогидростатический привод имеет автономный гидравлический контур и содержит электродвигатель, соединенный с реверсивным нерегулируемым гидронасосом, соединенным с силовым гидроцилиндром или поворотным гидродвигателем, и гидравлический аккумулятор, компенсирующий разность объемов поршневой и штоковой полостей гидроцилиндра и выполняющий функции автономного гидробака. Электродвигатель этого привода выполнен, в частности, вентильно-индукторным с независимым возбуждением, синхронным или асинхронным и подключен к выходным цепям силового генератора непосредственно или через коммутационное устройство, либо вентильно-индукторным с самовозбуждением, синхронным с постоянными магнитами или асинхронным и подключен к выходной цепи выпрямителя через преобразователь частоты или электронный контроллер. Электродвигатель, гидронасос и гидроаккумулятор этого привода встроены, в частности, в его гидроцилиндр или являются продолжением этого гидроцилиндра, а система электрооборудования обеспечивает регулирование направления и/или скорости вращения электродвигателя в зависимости от сигналов органа управления соответствующим приводом;
- силовой генератор выполнен вентильно-индукторным с независимым возбуждением или синхронным с постоянными магнитами, а тяговые электродвигатели выполнены вентильно-индукторными с независимым возбуждением или самовозбуждением или синхронными с постоянными магнитами;
- система электрооборудования состоит из высоковольтной части, содержащей, по меньшей мере, выпрямитель выходного напряжения силового генератора, коммутируемый тормозной резистор, а также, по меньшей мере, одно коммутационное устройство, силовой преобразователь частоты и/или электронный контроллер, и низковольтной части, содержащей, по меньшей мере, один микропроцессорный контроллер, панель оператора, датчики параметров работы агрегата, устройства освещения, световой и звуковой сигнализации и систему электроснабжения низковольтной части (аккумулятор и низковольтный генератор или преобразователь напряжения, приспособленный для заряда этого аккумулятора, соответственно, от двигателя или выходного напряжения силового генератора), причем высоковольтная часть системы электрооборудования имеет гальваническую развязку от ее низковольтной части;
- тракторный агрегат содержит электрогидростатические приводы механизмов натяжения гусениц, а система электрооборудования осуществляет прямое или косвенное измерение давлений в гидроцилиндрах этих приводов и/или скоростей вращения тяговых электродвигателей, а также управление этими приводами в зависимости от величин этих давлений и/или скоростей вращения тяговых электродвигателей. В частности, осуществляет стабилизацию этого давления, его увеличение при повороте агрегата и/или снижение давления при неподвижном агрегате. Цепи электропитания этих приводов могут быть подключены к аккумулятору низковольтной части системы электрооборудования;
- система управления приспособлена для переключения числа пар полюсов силового генератора и/или электродвигателя привода тракторного агрегата и осуществляет соответствующее дискретное переключение скорости привода;
- тракторный агрегат дополнительно содержит автономную систему смазки бортовых редукторов и/или, по меньшей мере, одного механизма ходовой части и/или рабочего оборудования, содержащую электрический масляный насос, цепи питания которого подключены к выходным цепям силового генератора, выпрямителя или аккумулятора;
- электрогидростатический или электромеханический привод имеет дополнительный орган ручного управления, размещенный на этом приводе, и/или оснащен датчиком перемещения и/или углового положения его выходного звена, а система электрооборудования осуществляет управление его электродвигателем из условия стабилизации положения этого выходного звена или его приведения в положение, заданное органом управления. В частности, датчик углового положения выходного звена выполнен в виде микромеханического акселерометра, а система электрооборудования обеспечивает указанное регулирование положения этого выходного звена относительно гравитационной вертикали;
- панель оператора содержит цветную графическую панель, устройство звуковой, световой или речевой сигнализации и органы управления этой панелью и/или агрегатом, выполненные в виде кнопок или клавиш, а органы управления агрегатом выполнены в виде джойстиков управления движением и рабочим оборудованием, ключа запуска двигателя, рукоятки управления подачей топлива, педалей тормоза и десселератора;
- отдельные устройства системы электрооборудования объединены между собой, в частности, с использованием шины последовательного интерфейса Controller Area Network (CAN) и/или Local Interconnect Network (LIN).
Альтернативные отличительные признаки независимого пункта формулы данного изобретения при их отдельной реализации, а также при реализации в различных комбинациях (сочетаниях), обеспечивают достижение одного и того же технического результата - повышение надежности промышленного тракторного агрегата с электромеханической трансмиссией.
Применение электромеханических приводов рабочего оборудования вместо гидравлических обеспечивает повышение надежности агрегата за счет исключения отказов, обусловленных утечками и изменением свойств рабочей жидкости в процессе эксплуатации агрегата. Использование электрогидростатических приводов приводит к повышению надежности за счет сокращения гидравлических магистралей, в том числе подключаемых к гидроцилиндрам, расположенным на подвижных рабочих органах, для которых невозможно обеспечить их эффективную защиту от механических повреждений. Реализация электромеханических, либо автономных электрогидростатических приводов, с одновременным исключением общего бака с гидравлической жидкостью, обеспечивает повышение надежности за счет исключения возможности потери рабочей жидкости во всей гидравлической системе при нарушении герметичности ее любого гидравлического компонента. Использование бесколлекторных электрических машин вместо коллекторных, в том числе тяговых электродвигателей и электродвигателей приводов рабочего оборудования, подключаемых непосредственно к силовому генератору, формирующему многофазное напряжение повышенной частоты, причем без применения силовых полупроводниковых преобразователей или коммутаторов, обеспечивает повышение надежности за счет упрощения конструкции этих электромашин и системы электрооборудования. Реализация систем централизованной смазки и автоматического натяжения гусениц также приводит к повышению надежности тракторного агрегата за счет обеспечения более благоприятных условий работы и снижения вероятности отказов его отдельных узлов и механизмов.
Наличие причинно-следственной связи между совокупностью существенных признаков заявляемого тракторного агрегата, в том числе альтернативных, и достигаемым техническим результатом - повышением его надежности, дополнительно показано при описании различных вариантов их реализации.
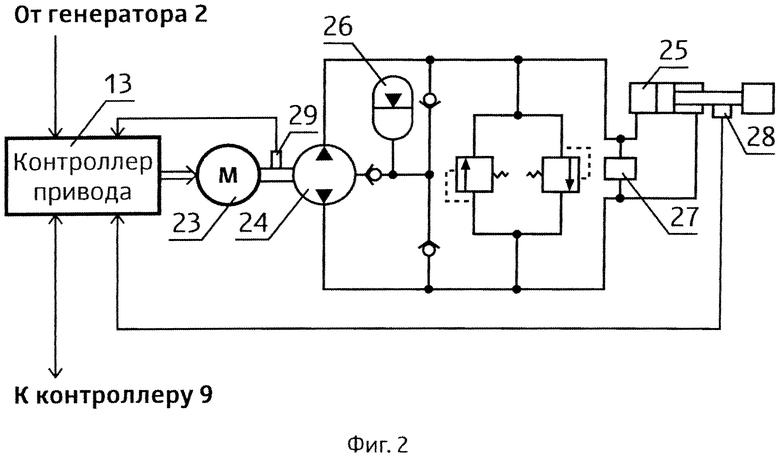
На фиг.1 приведена упрощенная схема предложенного промышленного тракторного агрегата с электромеханической трансмиссией, на фиг.2 - пример реализации электрогидростатического привода рабочего оборудования или механизма натяжения гусениц.
Тракторный агрегат (фиг.1) содержит двигатель внутреннего сгорания (ДВС) 1, который непосредственно, через жесткую (глухую), компенсирующую или упругую муфту, либо через согласующий (раздаточный) редуктор и муфту, соединен с силовым генератором 2, который является источником электрической энергии для тяговых электродвигателей 3 и 4, которые непосредственно или через дополнительные передаточные устройства (муфты, валы, дополнительные зубчатые передачи и т.д.) кинематически связаны с гусеницами противоположных бортов через бортовые редукторы 5, 6. На бортовых редукторах закреплены ведущие колеса (звездочки) 7, 8 гусеничного движителя.
Система электрооборудования, которая может именоваться системой контроля, защиты и управления, включает в себя высоковольтную и низковольтную части и представлена в виде главного (ведущего) контроллера 9, контроллера 10 генератора 2, двух контроллеров 11, 12 электродвигателей 3, 4, контроллера 13 привода рабочего оборудования или вала отбора мощности 14, приборов низковольтного оборудования 15 (устройств рабочего освещения, световой и звуковой сигнализации, системы электроснабжения низковольтной части, устройств поддержания микроклимата в кабине трактора и т.д.), органов управления движением и рабочим оборудованием агрегата 16, датчиков параметров работы агрегата (давления, температуры, перемещения, угла наклона и т.д.) 17, панели оператора 18 и других устройств.
Система электроснабжения содержит аккумулятор, а также низковольтный генератор или преобразователь напряжения, приспособленный для заряда этого аккумулятора, соответственно, от двигателя 1 или выходного напряжения силового генератора 2.
Высоковольтная часть системы электрооборудования имеет гальваническую развязку от ее низковольтной части.
Контроллер 10 генератора 2 преобразует выходное многофазное напряжение генератора 2 в постоянное напряжение силовой сети трансмиссии, например, 550 В и выполнен в виде выпрямителя, например, тиристорного.
Контроллеры 11 и 12 имеют встроенные системы управления, реализованные на основе микроконтроллеров, и осуществляют коммутацию (преобразование) этого напряжения в переменное синусоидальное напряжение, либо в однополярные импульсы перед подачей на электродвигатели 3, 4 и могут быть выполнены в виде силовых частотных преобразователей, инверторов или коммутаторов.
На тракторном агрегате возможно объединение контроллеров 9-13 в единый блок (модуль), либо их раздельное исполнение в зависимости от выполняемых функций и требований к компоновке агрегата. Возможно также конструктивное объединение контроллера 10 с генератором 1, а контроллеров 11, 12 - с электродвигателями 3, 4.
Параметры выходных сигналов контроллеров определяются типами использованных электродвигателей и сигналами управления этими контроллерами, поступающими от главного (ведущего) контроллера) 9.
Линии передачи информационных сигналов между контроллерами и панелью оператора 18 и другими устройствами системы электрооборудования выполнены с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров), ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно также применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п.
Главный контроллер 9 осуществляет координацию работы всех контроллеров системы электрооборудования, а также реализует функции управления двигателем 1 непосредственно, либо через дополнительный контроллер двигателя, встроенный в него.
Электродвигатели 3, 4 могут быть асинхронными, в частности, частотно-управляемыми. Однако более предпочтительным является применение вентильных реактивных (индукторных, индукционных) электродвигателей с самовозбуждением или независимым возбуждением - трех или более фазных электродвигателей без магнитов и электромагнитов в роторе и статоре, управляемых электронными ключами контроллеров 11, 12. Такие электродвигатели с самовозбуждением в англоязычной литературе называются электродвигателями с переменным магнитным сопротивлением: «Switched Reluctance Motor (SRM)».
Перспективно также применение синхронных электродвигателей с постоянными магнитами в роторе, которые на английском языке называются «Permanent Magnet Synchronous Motor (PMSM)». Реже используется название «BrushLess Direct Current motor (BLDC)», что переводится, как «Бесщеточный мотор постоянного тока».
Генератор 2 формирует переменное напряжение частотой не менее 100 Гц и числом фаз, не менее 3-х. Он может иметь конструкцию, аналогичную электродвигателям 3, 4, или отличающуюся от них.
Контроллеры 11, 12 обеспечивает коммутацию обмоток электродвигателей 3, 4 при их работе как при движении агрегата, так и при торможении тракторного агрегата, осуществляя их перевод в режим генераторов.
Трактор оснащен рабочим (навесным) оборудованием и, при необходимости, валом отбора мощности (ВОМ). По меньшей мере один привод рабочего оборудования или ВОМ 14 выполнен электромеханическим или электрогидростатическим, причем цепи его силового электрического питания подключены к силовому генератору или к выпрямителю. Поскольку генератор 2 имеет многофазное выходное напряжение переменного тока повышенной частоты, возможна реализация привода с асинхронными, синхронными или вентильно-индукторными электродвигателями с независимым возбуждением, силовые цепи которых соединены с силовыми цепями генератора 2 без применения дополнительного силового преобразователя частоты.
Одновременно с применением, по меньшей мере, одного электромеханического или электрогидростатического привода 14 какого-либо механизма, возможно также применение гидравлических, гидромеханических или электрогидравлических приводов других механизмов этого агрегата. Выбор необходимого вида привода зависит от требований к его мощности и удобству компоновки на тракторном агрегате и определяется при его проектировании.
Каждый привод рабочего оборудования или ВОМ 14 имеет гидромотор или гидроцилиндр и/или электродвигатель. Управление приводами осуществляется оператором с помощью органов управления 16 через главный контроллер 9 и контроллер 13 приводов, либо этими контроллерами в автоматическом режиме.
В электродвигатели 3, 4 или в бортовые редукторы 7, 8 могут быть встроены нормально замкнутые стояночные тормоза 19, 20, управление которыми осуществляется непосредственно главным контроллером 9 или контроллерами 11, 12 электродвигателей. Они обеспечивают включение тормозов 19, 20 для предотвращения скатывания тракторного агрегата под уклон, а также для его торможения и остановки, если по каким-либо причинам интенсивность электрического торможения оказывается недостаточной.
Для управления движением и приводами рабочего оборудования 14 тракторный агрегат оснащен органами управления 16, в том числе аппаратами управления движением машины (джойстиком) и его рабочим оборудованием и ВОМ, ключом запуска двигателя, рукояткой управления подачей топлива, педалями тормоза и десселератора и т.п., соединенными с главным контроллером 9, выполняющим функции центрального контроллера системы электрооборудования.
Контроллер 9 соединен также с панелью оператора 18 (панелью контрольно-измерительных приборов), обеспечивающей отображение параметров работы тракторного агрегата и формирование аварийных и предупредительных сигналов для оператора. Она выполнена в виде набора электромеханических указателей и сигнальных ламп, либо в виде цветной графической панели с устройствами звуковой или речевой сигнализации и органами управления (кнопками или клавишами) этой панелью и/или агрегатом.
Для контроля угловых скоростей вращения тяговых электродвигателей 3, 4 система электрооборудования может содержать датчики 21, 22 угловых скоростей этих электродвигателей или положений их роторов.
Электрогидростатический привод (фиг.2) имеет автономный гидравлический контур и содержит электродвигатель 23, соединенный с реверсивным нерегулируемым гидронасосом 24, выходные магистрали которого соединены с силовым гидроцилиндром или поворотным гидродвигателем 25, и гидравлический аккумулятор 26, приспособленный для компенсации разности объемов поршневой и штоковой полостей гидроцилиндра или полостей гидродвигателя и для выполнения функции автономного гидробака. Этот привод может иметь также датчик давления рабочей жидкости в гидроцилиндре или поворотном гидродвигателе, датчик положения 28 его выходного звена (например, датчик линейного перемещения или углового положения - микромеханический акселерометр, если перемещение выходного звена привода приводит к изменению его углового положения) и датчик угловой скорости или положения ротора электродвигателя 23.
Электродвигатель 23, гидронасос 24 и гидроаккумулятор 26 электрогидростатического привода могут быть встроены в гидроцилиндр или поворотный гидродвигатель 25 этого привода, либо конструктивно выполнены как их продолжение.
Электрогидростатические приводы (фиг.2) могут быть установлены на гусеничных тележках тракторного агрегата и приспособлены для натяжения его гусениц. Для электрического питания этих приводов, ввиду малой потребляемой мощности, может использоваться низковольтное напряжение бортовой сети агрегата (напряжение аккумуляторной батареи).
На тракторном агрегате возможна также установка, по меньшей мере, одной автономной системы смазки бортовых редукторов, механизмов ходовой части и рабочего оборудования 14, реализованной с использованием электрического масляного насоса. Его цепи питания подключены к выходным цепям силового генератора, выпрямителя или аккумулятора.
На электрогидростатическом или электромеханическом приводе может быть установлен дополнительный орган управления, приспособленный для ручного управления его электродвигателем при нахождении оператора вне кабины агрегата. Это позволяет повысить безопасность работы агрегата в тех случаях, когда невозможно обеспечить необходимую обзорность выходного звена привода из кабины тракторного агрегата. Это относится, в частности, к управлению механизмами натяжения гусениц.
Промышленный тракторный агрегат с электромеханической трансмиссией работает следующим образом.
При вращении выходного вала дизельного двигателя 1 контроллер (выпрямитель) 10 осуществляет выпрямление многофазного переменного напряжения силового генератора 2. Сформированное в результате этого напряжение постоянного тока силовой сети трансмиссии, например, 550 В, поступает на контроллеры 11, 12 и, в отдельных случаях, на контроллер 13. Они выполняют функции силовых электронных коммутаторов или инверторов - преобразователей постоянного напряжения в переменное регулируемой частоты.
Тяговые электродвигатели 3, 4, получающие электрическую энергию от контроллеров 11, 12, преобразуют ее в механическую энергию и передают вращающий момент на бортовые редукторы 5, 6 и далее на ведущие звездочки 7, 8 гусеничного движителя, обеспечивая движение тракторного агрегата.
Режимы работы двигателя 1, генератора 2 и электродвигателей 3, 4 задаются главным контроллером 9, связанным с органами управления 16 и панелью оператора 18. Он реализован на основе микроконтроллера и выполняет функции координатора системы электрооборудования трактора.
Во время работы агрегата скорость его движения устанавливается контроллерами 9, 11, 12 в зависимости от положения рукоятки органа управления 16 и тяговой нагрузки агрегата, контролируемой с помощью датчиков 17.
Повороты осуществляются путем задания разных угловых скоростей электродвигателей 3, 4. Датчики угловой скорости 21, 22 при этом используются для контроля этих скоростей и синхронизации работы бортов агрегата с целью обеспечения его прямолинейного движения при отсутствии поворотов.
При поступлении на главный контроллер 9 сигнала остановки (торможения) агрегата путем перевода органа управления его движением в нулевое положение или путем воздействия на орган управления тормозом (педаль), контроллеры 11, 12 по сигналам с главного контроллера 9, переводят электродвигатели 3, 4 в режим генераторов. Интенсивность торможения определяется положением (перемещением), углом наклона органа управления 16, или силой, с которой на него воздействует оператор.
При этом электродвигатели 3, 4, работающие в режиме генератора, преобразуют кинетическую энергию движения агрегата в электрическую энергию и подают ее в силовую сеть трансмиссии. В силовой сети трансмиссии образуется избыточная энергия, которая поглощается коммутируемым тормозным резистором (на фиг.1 условно не показан). Эта избыточная энергия может быть также передана в двигатель 1 через генератор 2, работающий в режиме электродвигателя, а также в электродвигатели приводов рабочего оборудования и ВОМ.
Нормально замкнутые стояночные тормоза 19, 20 обеспечивают удержания тракторного агрегата на уклоне и не принимают участия при его нормальной работе (не являются рабочими тормозами). Однако контроллеры 11, 12 могут осуществлять включение этих тормозов, если главным контроллером 9 будет установлено, что тормозного момента, создаваемого электродвигателями 3, 4, недостаточно для торможения агрегата с интенсивностью, заданной органом управления торможением 16.
Благодаря реализации силового генератора 2 с выходным многофазным переменным напряжением повышенной частоты, например, 100...500 Гц, обеспечивается возможность применения на тракторном агрегате компактных асинхронных, синхронных и вентильно-индукторных электродвигателей с независимым возбуждением, которые могут работать без применения силовых преобразователей частоты или электронных коммутаторов. В этом случае контроллер 13 осуществляет лишь подключение/отключение выходного переменного напряжения генератора 2 к соответствующему электродвигателю привода 14, либо переключение его фаз, обеспечивая изменение направления его вращения. Поскольку преобразование силового напряжения питания электродвигателя отсутствует, силовая часть контроллера 13 выполнена в виде электромеханических или электронных дискретных ключей (контакторов, тиристоров и т.п.). Это обеспечивает максимальное упрощение системы электрооборудования и достижение ее максимальной надежности.
В отдельных случаях при управлении рабочими органами тракторного агрегата достаточно дискретного изменения (переключения) скорости их приводов. Это изменение может осуществляться путем переключения числа пар полюсов силового генератора и/или электродвигателя привода. В этом случае контроллер привода 13 или контроллер генератора 10 содержит силовые ключи, осуществляющие переключение обмоток электродвигателя или генератора. Изменение скорости привода 14 при этом происходит за счет изменения либо числа пар полюсов его электродвигателя, либо частоты его питающего напряжения.
В тех случаях, когда необходимо пропорциональное бесступенчатое регулирование скорости привода 14, силовая часть контроллера 13 содержит силовой преобразователь частоты или электронный коммутатор и получает электрическое питание постоянного напряжения, например, 550 В, от контроллера-выпрямителя 10.
Наличие многофазного переменного напряжения повышенной частоты, обеспечивающее компактность электродвигателей, позволяет реализовать малогабаритные электромеханические и электрогидростатические приводы, которые можно разместить непосредственно на рабочих органах и рамах гусеничных тележек.
В электрогидростатическом приводе вращательное движение электродвигателя преобразуется в линейное или угловое перемещение его выходного звена (при применении соответственно, гидроцилиндра или поворотного гидродвигателя) с помощью потока жидкости под давлением, определяемым внешней нагрузкой. Изменение направления и скорости движения выходного звена осуществляется за счет направления и скорости вращения электродвигателя. В части ресурса такой привод, благодаря отсутствию сложного кинематического механизма изменения подачи насоса, превосходит традиционный привод объемного регулирования с использованием аксиально-поршневого гидромотора. Кроме того этот привод, за счет того, что скорость вращения его насоса не постоянна, а пропорциональна требуемой скорости, потребляет меньшую мощность.
Электрогидростатический привод является автономным агрегатом, к которому нет необходимости прокладывать трубопроводы с гидравлической жидкостью. Соответственно, применение таких приводов исключает потребность в централизованной гидравлической системе, позволяет исключить общий гидравлический насос, гидробак и протяженные гидравлические линии, что также обеспечивает повышение надежности тракторного агрегата.
На тракторном агрегате могут быть одновременно реализованы различные виды и типы приводов. Их рациональный выбор зависит от мощности отдельно взятого привода и требований к точности его управления (позиционирования).
Например, привод подъема/опускания отвала бульдозера должен иметь мощность не менее 30% от мощности ДВС 1. В этом случае может оказаться целесообразным применение гидравлического или электрогидравлического привода с установкой гидронасоса, механически связанного ДВС 1.
В противоположность этому, для управления перекосом отвала бульдозера или для изменения угла рыхления требуется значительно меньшая мощность. Соответственно, для привода этих механизмов рабочих органов целесообразно применение электрогидростатического или электромеханического привода. В этом случае исключается необходимость прокладки гидравлических линий к этому приводу, расположенному на подвижном рабочем органе, что обеспечивает повышение надежности тракторного агрегата.
Привод механизма натяжения гусениц имеет малую мощность ввиду низких требований к его быстродействию. Причем подвод гидравлических линий к этому приводу, расположенному на подвижных гусеничных тележках, также затруднен. В этом случае, по аналогичным причинам, оправдано применение электрогидростатического привода.
Каждый электрогидростатический привод с соответствующим контроллером может быть оснащен датчиками параметров его работы 27, 28, 27 и может иметь автономный контур регулирования.
В частности, возможно поддержание заданной величины давления в гидроцилиндре или поворотном гидродвигателе 25 и, соответственно, поддержание величины усилия этого привода, заданной органом управления 16. Возможно также поддержание заданного пространственного положения или заданной скорости перемещения выходного звена каждого привода. Если датчик его углового положения выполнен в виде микромеханического акселерометра, то возможно указанное регулирование положения выходного звена привода относительно гравитационной вертикали.
Применительно к бульдозерному агрегату это техническое решение позволяет обеспечить, в частности, автоматическую стабилизацию положения отвала бульдозера в режиме планирования грунта.
Реализация электрогидростатических приводов механизмов натяжения гусениц позволяет также повысить надежность работы ходовой части тракторного агрегата.
Известно, что из-за недостаточного натяжения гусениц во время движения тракторного агрегата возможно сбегание гусеничных цепей с направляющих колес или ведущих звездочек, особенно при поворотах. С другой стороны, чрезмерное натяжение гусениц вызывает излишние напряжения в деталях гусеничного движителя, повышенный износ подшипником и шарнирных соединений, заклинивание гусениц, деформацию гусеничных тележек или изгиб полуосей. Соответственно, как недостаточное, так и избыточное натяжение гусениц приводит к снижению надежности работы тракторного агрегата.
Система электрооборудования, с целью повышения этой надежности, осуществляет управление электрогидростатическими приводами механизмов натяжения гусениц (см. фиг.2), используя сигнал датчика давления 27. В этом случае обеспечивается поддержание предварительно установленной величины давления в гидроцилиндрах этих приводов, т.е. стабилизация усилий натяжения гусениц.
При наличии такой стабилизации, при воздействии на одну или обе гусеницы значительных усилий в результате, например, наезда на препятствие, часть жидкости из поршневой полости одного или обоих силовых цилиндров 25 вытесняется в гидроаккумулятор 26, что смягчает ударную нагрузку, воспринимаемую гусеницами. После съезда с препятствия электрогидростатический привод автоматически восстанавливает усилие их натяжения.
При остановке агрегата, выявляемом контроллерами по сигналам датчиков 21, 22 угловой скорости электродвигателей 3, 4 или датчика угловой скорости двигателя 1, электрогидростатический привод реализует автоматическое ослабление натяжения гусениц. Это позволяют увеличить срок эксплуатации гусеничных лент, подшипниковых втулок и ведущих звездочек и, соответственно, надежность тракторного агрегата.
При повороте тракторного агрегата электрогидростатический привод задает более высокое усилие натяжения гусениц, чем при прямолинейном движении. Это позволяет исключить проскоки гусеничных цепей на ведущих звездочках и уменьшить вероятность сброса гусениц, что также повышает надежность работы тракторного агрегата.
Применение автономных приводов позволяет аналогичным образом реализовать иные функции управления различными узлами и механизмами тракторного агрегата с целью повышения надежности его работы.
Заявленный промышленный тракторный агрегат с электромеханической трансмиссией допускает также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
(56) 1. BY 5907 U, В 60К 17/00, В 60L 11/00, 28.02.2010.
2. Трактор ДЭТ-250 М2. Техническое описание и инструкция по эксплуатации. Трактороэкспорт СССР - М.: Внешторгиздат, 1991.
Изобретение относится к промышленным тракторам. Промышленный тракторный агрегат с электромеханической трансмиссией содержит двигатель, гусеничную ходовую часть, силовой генератор, связанный с двигателем, тяговый электродвигатель, связанный с гусеницами противоположных бортов, кабину с органами управления, рабочее оборудование и систему электрооборудования, соединенную с органами управления, с тяговым электродвигателем и приводами рабочего оборудования. Силовой генератор формирует многофазное переменное напряжение с частотой не менее 100 Гц. Система электрооборудования содержит выпрямитель выходного напряжения силового генератора. Привод рабочего оборудования или вала отбора мощности выполнен электрогидростатическим или электромеханическим с возможностью подключения цепей его силового электрического питания к силовому генератору или к выпрямителю. Повышается надежность работы тракторного агрегата. 21 з.п. ф-лы, 2 ил.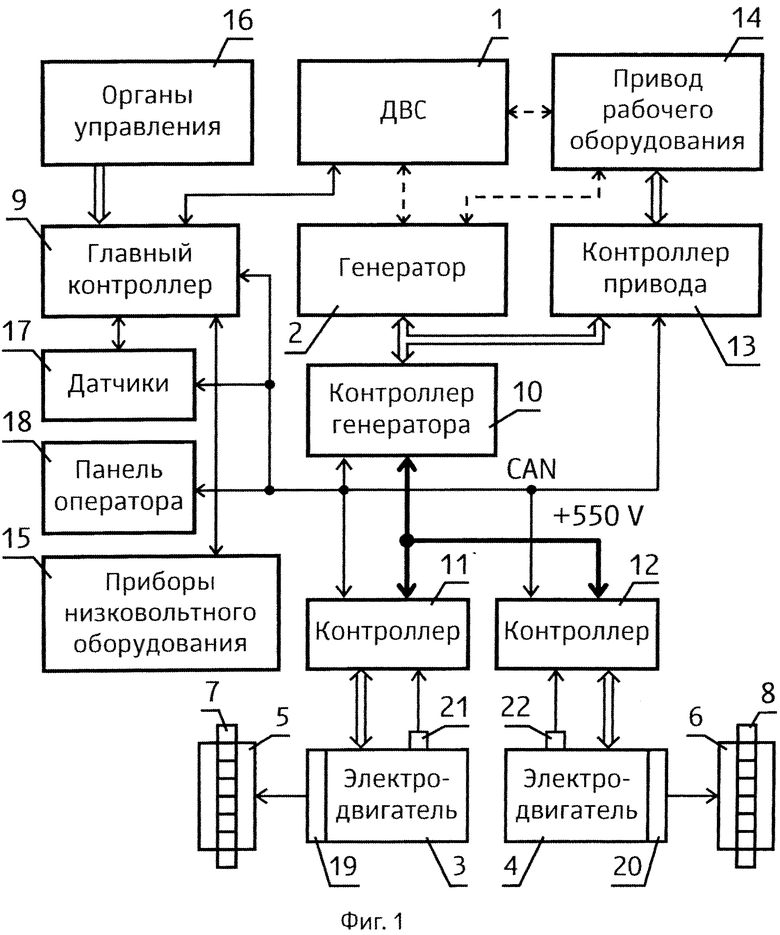
1. Промышленный тракторный агрегат с электромеханической трансмиссией, содержащий двигатель внутреннего сгорания, гусеничную ходовую часть с ведущими и натяжными колесами, силовой генератор, связанный с двигателем, по меньшей мере, один тяговый электродвигатель, кинематически связанный с гусеницами противоположных бортов через бортовые редукторы, кабину с органами управления, рабочее оборудование с приводами его поступательного и/или вращательного перемещения, а также систему электрооборудования, соединенную с органами управления и, по меньшей мере, с одним тяговым электродвигателем и приводами рабочего оборудования, отличающийся тем, что силовой генератор приспособлен для формирования многофазного переменного напряжения с частотой не менее 100 Гц, система электрооборудования содержит выпрямитель выходного напряжения силового генератора, причем, по меньшей мере, один привод рабочего оборудования или вала отбора мощности выполнен электрогидростатическим или электромеханическим с возможностью подключения цепей его силового электрического питания к силовому генератору или к выпрямителю.
2. Агрегат по п.1, отличающийся тем, что он содержит приводы рабочего оборудования, по меньшей мере, двух видов, различающихся способом передачи движения.
3. Агрегат по п.2, отличающийся тем, что он содержит, по меньшей мере, один электромеханический, гидравлический, гидромеханический, электрогидравлический или электрогидростатический привод рабочего оборудования.
4. Агрегат по любому из пп. 1, 2 или 3, отличающийся тем, что электрогидростатический привод имеет автономный гидравлический контур и содержит электродвигатель, соединенный с реверсивным нерегулируемым гидронасосом, выходные магистрали которого соединены с силовым гидроцилиндром или поворотным гидродвигателем, и гидравлический аккумулятор или гидравлический компенсатор, приспособленный для выполнения функции автономного гидробака.
5. Агрегат по п.4, отличающийся тем, что электродвигатель электрогидростатического привода выполнен вентильно-индукторным с независимым возбуждением, или синхронным, или асинхронным, приспособленным для присоединения к выходным цепям силового генератора переменного тока непосредственно или через коммутационное устройство, причем система электрооборудования и входящее в ее состав коммутационное устройство выполнены с возможностью включения/выключения и/или изменения направления вращения этого электродвигателя в зависимости от сигналов, по меньшей мере, одного органа управления.
6. Агрегат по п.4, отличающийся тем, что электродвигатель электрогидростатического привода выполнен вентильно-индукторным с самовозбуждением, или синхронным, или асинхронным, приспособленным для подключения к выходной цепи выпрямителя через преобразователь частоты или электронный контроллер, причем система электрооборудования и входящий в ее состав преобразователь частоты или электронный контроллер выполнены с возможностью изменения направления и/или скорости вращения этого электродвигателя в зависимости от сигналов, по меньшей мере, одного органа управления.
7. Агрегат по п.4, отличающийся тем, что электродвигатель, гидронасос и гидроаккумулятор электрогидростатического привода встроены в гидроцилиндр или поворотный гидродвигатель этого привода или прикреплены к нему.
8. Агрегат по п.1, отличающийся тем, что силовой генератор выполнен вентильно-индукторным с независимым возбуждением или синхронным, причем, по меньшей мере, один тяговый электродвигатель выполнен вентильно-индукторным с независимым возбуждением, или с самовозбуждением, или синхронным.
9. Агрегат по любому из пп. 1, 5, 6, 7 или 8, отличающийся тем, что система электрооборудования выполнена с возможностью переключения числа пар полюсов силового генератора и/или электродвигателя привода и приспособлена для дискретного изменения скорости вращения этого электродвигателя.
10. Агрегат по п.1, отличающийся тем, что он содержит электрогидростатические приводы механизмов натяжения гусениц.
11. Агрегат по п.1 или 10, отличающийся тем, что система электрооборудования выполнена с возможностью измерения давления в гидроцилиндре или поворотном гидродвигателе электрогидростатического привода и/или скоростей вращения тяговых электродвигателей, а также приспособлена для управления этим электрогидростатическим приводом в зависимости от величин этого давления и/или скоростей вращения тяговых электродвигателей.
12. Агрегат по п.10, отличающийся тем, что система электрооборудования приспособлена для управления электрогидростатическими приводами механизмов натяжения гусениц с возможностью поддержания предварительно установленной величины давления в гидроцилиндрах электрогидростатических приводов, и/или увеличения этого давления при повороте агрегата, и/или его снижения при неподвижном агрегате.
13. Агрегат по п.1, отличающийся тем, что система электрооборудования состоит из высоковольтной части, содержащей, по меньшей мере, выпрямитель выходного напряжения силового генератора, коммутируемый тормозной резистор, а также, по меньшей мере, одно коммутационное устройство, и/или силовой преобразователь частоты, и/или электронный контроллер, приспособленные для управления, по меньшей мере, одним тяговым электродвигателем и/или электродвигателем привода рабочего оборудования, и низковольтной части, содержащей, по меньшей мере, один микропроцессорный контроллер, панель оператора, датчики параметров работы агрегата, устройства освещения, световой и звуковой сигнализации и систему электроснабжения низковольтной части, причем высоковольтная часть системы электрооборудования имеет гальваническую развязку от ее низковольтной части.
14. Агрегат по п.13, отличающийся тем, что система электроснабжения содержит аккумулятор, а также низковольтный генератор или преобразователь напряжения, приспособленный для заряда этого аккумулятора, соответственно, от двигателя или от выходного напряжения силового генератора или выпрямителя.
15. Агрегат по п.13, отличающийся тем, что панель оператора содержит цветную графическую панель, устройство звуковой или речевой сигнализации и органы управления этой панелью и/или агрегатом, выполненные в виде кнопок или клавиш.
16. Агрегат по п.1 или 14, отличающийся тем, что он дополнительно содержит, по меньшей мере, одну автономную систему смазки бортовых редукторов и/или, по меньшей мере, одного механизма ходовой части и/или рабочего оборудования, содержащую электрический масляный насос, выполненный с возможностью подключения цепей его электропитания к выходным цепям силового генератора, или выпрямителя, или аккумулятора.
17. Агрегат по п.1, отличающийся тем, что электрогидростатический или электромеханический привод имеет дополнительный орган управления, размещенный на этом приводе и приспособленный для управления его электродвигателем.
18. Агрегат по п.1, отличающийся тем, что электрогидростатический или электромеханический привод оснащен датчиком перемещения и/или углового положения его выходного звена, а система электрооборудования приспособлена для управления его электродвигателем с возможностью стабилизации положения этого выходного звена или его приведения в положение, заданное органом управления.
19. Агрегат по п.18, отличающийся тем, что датчик углового положения выходного звена электрогидростатического или электромеханического привода выполнен в виде микромеханического акселерометра, а система электрооборудования приспособлена для управления его электродвигателем с возможностью автоматической стабилизации положения этого выходного звена относительно гравитационной вертикали или его приведения в положение относительно гравитационной вертикали, заданное органом управления.
20. Агрегат по любому из пп. 1, 10 или 14, отличающийся тем, что, по меньшей мере, один электромеханический или электрогидростатический привод рабочего оборудования или электрогидростатический привод механизма натяжения гусениц выполнен с возможностью подключения цепей его электропитания к аккумулятору низковольтной части системы электрооборудования.
21. Агрегат по п.1 или 13, отличающийся тем, что, по меньшей мере, два устройства его системы электрооборудования объединенны между собой шиной последовательного интерфейса Controller Area Network (CAN) и/или Local Interconnect Network (LIN).
22. Агрегат по п.1 или 13, отличающийся тем, что органы управления агрегатом выполнены в виде джойстиков управления движением и рабочим оборудованием, ключа запуска двигателя, рукоятки управления подачей топлива, педалей тормоза и деселератора.
| Многофакельная газокислородная горелка-мундштук | 1950 |
|
SU92844A1 |
| Способ питания поверхностных подогревателей | 1931 |
|
SU26704A1 |
| Кухня типа "Примус" | 1929 |
|
SU20284A1 |
| Прибор для съёмки лав | 1936 |
|
SU64144A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2007 |
|
RU2376158C2 |
| CN 103269927 A, 28.08.2013 | |||

