Изобретение относится к тяговым и транспортным средствам, предназначенным для перемещения и обеспечения электрической энергией прицепных и навесных грузоподъемных машин различного назначения, в том числе укладочных кранов (путеукладчиков), прицепных стреловых и портальных кранов, бурильно-крановых машин, трубоукладчиков, погрузчиков и т.д., использующих при выполнении различных землеройных, строительных и транспортных работ, в том числе при укладке и разборке железнодорожного пути.
Известен путеукладчик, содержащий гусеничный тягач, раму и грузоподъемный орган с рельсовыми захватами, смонтированный на раме и перемещающийся вдоль нее. Рама путеукладчика при укладке звеньев рельсошпальной решетки опирается одним концом на железнодорожный путь посредством комбинированного хода и на земляное полотно при помощи аутригеров, а другим концом на тягач, имеющий комбинированный железнодорожный ход. При этом тягач опирается на земляное полотно гусеничными тележками и аутригерами (DE 2313055 (Al), Е01В 29/02, 19.09.1974).
К его недостаткам относятся значительные затраты времени на перевод из рабочего положение в транспортное и обратно, а также возможность разрушения земляного полотна аутригерами.
Известна также гусеничная машина с мобильным источником энергии для укладки железнодорожного пути при строительстве метрополитена. Она содержит портал, подъемное и передвижное устройства (тягач) с электрическим приводом на основе электродвигателей переменного тока и портативный источник энергии, выполненный в виде батареи свинцово-кислотных аккумуляторов (АКБ) и инвертора. Подъемное устройство установлено на портале, содержащем телескопическую ферму (балку) и две опорные стойки, регулируемые по высоте. Передвижное устройство (тягач) используется для перемещения портала вперед/назад. Мобильный источник энергии является основным бортовым источником питания и установлен на портале или на тягаче (CN 107326755 (А), Е01В 29/02, H02J 7/00, 07.11.2017).
Применение электрического привода движения тягача и грузоподъемных механизмов, а также АКБ и инвертора вместо двигателя внутреннего сгорания (ДВС) и электрического генератора, обеспечивает упрощение конструкции машины. Однако АКБ по запасу энергии значительно уступает ДВС с топливным баком. Это приводит к необходимости частой замены или подзарядки АКБ и, соответственно, ограничивает область применения тягача.
Наиболее близким к предложенному и принятому за прототип является гусеничный тягач портальных путеукладчиков серии ПБ (ПБ-2, ПБ-3, ПБ-3М), реализованный на базе гусеничного трактора (Т-100М, Т-130, Т-170 и т.п.) с механической трансмиссией и с комбинированным ходом, обеспечивающим возможность его перемещения по грунту и по железной дороге. Укладочная часть путеукладчика (грузоподъемная машина, путеукладочный кран) содержит ферму (стрелу), опирающуюся спереди на трактор - на водило (механизм сдвижки в поперечном направлении) с электрическим приводом, а сзади - на портал, охватывающий путь. На водило опирается гусек, прикрепленный к ферме. Портал смонтирован на двух гусеничных тележках, устанавливаемых на земляном полотне по финишам (концам) шпал. Звенья пути стропуются двумя захватными рамами. На ферме или портале размещены грузовые лебедки с ограничителями грузоподъемности, служащие для подъема/опускания рельсового звена и двух захватных рам, тяговая лебедка, использующаяся для подтягивания под путеукладчик пакетов с путевыми звеньями, и кран-укосина. В приводах лебедок, водила и крана-укосины используются асинхронные электродвигатели. Для их обеспечения электрической энергией в передней части трактора установлен синхронный генератор трехфазного тока, соединенный с коленчатым валом ДВС и оснащенный блоком регулирования его выходного напряжения (SU 147208 Al, Е01В 29/02, В66С 23/44, 30.11.1961; Коротков В.Н., Завьялов А.А., Новиков Е.К. Путевые машины и механизмы. Отраслевой каталог 18-3-82. Часть I. - М.: ЦНИИТЭИТЯЖМАШ, 1982, - с. 9-11; Чижов А.Т., Костюкович А.Р. Механизация укладки пути. - М.: Транспорт, 1966, - с. 69-75).
Недостатком трактора-тягача в этом путеукладчике является повышенная сложность конструкции и пониженная надежность, что обусловлено применением механической трансмиссии и отдельного синхронного генератора. Его другим недостатком является пониженная топливная экономичность и пониженная тяговая мощность. Обусловлено это тем, что для обеспечения необходимой частоты выходного напряжения генератора (50 Гц) ДВС должен работать с постоянной скоростью вращения - 3000, 1500, или 1000 об/мин, если синхронный генератор имеет соответственно два (2Р), четыре (4Р), или шесть (6Р) полюсов. Эта скорость не может изменяться в процессе работы трактора-тягача и не соответствует режимам работы ДВС, в которых достигается его максимальная мощность и топливная экономичность.
Из анализа аналогов и прототипа следует, что в предшествующем уровне техники не решена техническая проблема создания гусеничного трактора-тягача грузоподъемной машины, обеспечивающего электрической энергией ее приводы и отличающегося простотой конструкции и высокой топливной экономичностью. Задачей изобретения является создание такого трактора-тягача.
Техническим результатом, обеспечиваемым изобретением, является упрощение конструкции и повышение топливной экономичности гусеничного трактора-тягача, обеспечивающего перемещение грузоподъемной машины и снабжение электрической энергией приводов ее рабочих механизмов.
В тракторе-тягаче грузоподъемной машины, содержащем ходовую часть, ДВС, генератор, который непосредственно или через согласующее устройство механически соединен с ДВС и приспособлен для преобразования по меньшей части его механической энергии в электрическую энергию и для обеспечения электрической энергией по меньшей мере одного электродвигателя привода грузоподъемной машины, и систему управления, поставленная задача решается благодаря тому, что он выполнен с электромеханической трансмиссией, содержащей по меньшей мере один тяговый электродвигатель, а генератор выполнен с возможностью обеспечения этой трансмиссии электрической энергией.
В целях достижения указанного технического результата в частных вариантах реализации изобретения:
- трактор-тягач имеет комбинированный гусеничный и железнодорожный ход на основе универсальных тележек гусениц или приводных рельсовых колес, в частности, мотор-колес, с электродвигателями железнодорожного хода, получающими электроэнергию от генератора, причем мотор-колеса содержат указанные электродвигатели, колесные редукторы и тормоза;
- система управления содержит контроллер генератора и/или контроллер ДВС, осуществляющие регулирование тока возбуждения генератора и/или частоты вращения ДВС, в частности, из условия стабилизации величины и частоты выходного напряжения генератора;
- генератор выполнен асинхронным или синхронным трехфазным, частота выходного напряжение которого выбраны или регулируются контроллером генератора и/или контроллером ДВС из условия обеспечения возможности подключения к этому генератору асинхронных и/или синхронных электродвигателей приводов механизмов грузоподъемной машины, тяговых электродвигателей и/или электродвигателей железнодорожного хода. С этой целью согласующее устройство выполнено, в частности, в виде механического редуктора, ременной или цепной передачи с передаточным отношением, при котором частота вращения ДВС в номинальном режиме его работы или в режиме максимальной топливной экономичности соответствует скорости вращения генератора, при которой частота его выходного напряжения равна 50 Гц;
- контроллер генератора дополнительно содержит силовой выпрямитель или силовой электронный коммутатор, обеспечивающий стабилизацию и выпрямление выходного напряжения генератора, а в состав системы управления входят один или несколько контроллеров тяговых электродвигателей, и/или электродвигателей железнодорожного хода, и/или электродвигателей приводов грузоподъемной машины, осуществляющих преобразование и передачу электрической энергии постоянного тока с выхода выпрямителя или силового электронного коммутатора на эти электродвигатели;
- контроллер генератора формирует трехфазное напряжения переменного тока с частотой, не зависящей от частоты вращения ДВС, например 50 Гц, использующееся для обеспечения электрической энергией асинхронных или синхронных электродвигателей привода (приводов) механизмов грузоподъемной машины, тяговых электродвигателей и/или электродвигателей железнодорожного хода;
- контроллер генератора содержит силовой выпрямитель выходного напряжения генератора или силовой электронный коммутатор, обеспечивающий стабилизацию и выпрямление выходного напряжения генератора, а в состав системы управления входит инвертор, преобразующий полученное постоянное напряжение в трехфазное напряжения переменного тока, в частности 380 В, 50 Гц, причем инвертор имеет выходную мощность, достаточную для подключения к нему одного, нескольких или всех асинхронных и/или синхронных электродвигателей, установленных на гусеничном тракторе-тягаче и грузоподъемной машине;
- генератор выполнен вентильно-индукторным, синхронным с постоянными магнитами на роторе или синхронным с обмоткой возбуждения на роторе или статоре, а силовой электронный коммутатор реализован на основе силовых транзисторных ключей или IGBT-модулей соответственно по несимметричной или симметричной мостовой схеме с обратными диодами, обеспечивающими возможность реализации силового выпрямителя;
- по меньшей мере один тяговый электродвигатель, и/или электродвигатель привода механизмов грузоподъемной машины, и/или электродвигатель железнодорожного хода выполнен вентильно-индукторным;
- грузоподъемная машина выполнена в виде портального путеукладочного крана, трубоукладчика, стрелового крана, погрузчика, крано-манипуляторной установки (КМУ), или бурильно-крановой машины, имеющей электрический привод по меньшей мере одного ее рабочего механизма.
Реализация отличительных, в том числе альтернативных, признаков независимого и зависимых пунктов формулы изобретения обеспечивает получение одного и того же указанного технического результата.
А именно, реализация отличительного признака независимого пункта формулы изобретения, заключающегося в применении электромеханической трансмиссии, позволяет использовать один генератор одновременно как для перемещения трактора-тягача и грузоподъемной машины, так и для работы ее грузоподъемных механизмов. Исключение менее надежной механической трансмиссии и дополнительного генератора, который в прототипе специально установлен для обеспечения электрической энергией приводов механизмов грузоподъемной машины, а также регулятора напряжения этого генератора и передаточного устройства, соединяющего ДВС с этим генератором, обеспечивает существенное упрощение устройства. При этом одновременно достигается повышение топливной экономичности трактора-тягача, поскольку для питания приводов механизмов грузоподъемной машины используется более мощный генератор, имеющий более высокий КПД, Повышение топливной экономичности достигается также за счет исключения механических потерь в дополнительном генераторе и в передаточном устройстве, соединяющем этот генератор с ДВС.
Реализация отличительного признака, заключающегося в применении комбинированного гусеничного и железнодорожного хода, особенно на основе приводных рельсовых колес или мотор-колес, содержащих электродвигатели железнодорожного хода, колесные редукторы и тормоза, обеспечивает упрощение конструкции трактора-тягача за счет применения электрического привода железнодорожного хода, поскольку в этом случае не требуется применения сложных механических передач, карданных валов и т.д. Одновременно обеспечивается повышение топливной экономичности, поскольку сопротивление передвижения трактора-тягача по железнодорожному пути на рельсовых колесах значительно меньше, чем на гусеницах.
В случае реализации комбинированного хода на основе универсальных тележек гусениц с электроприводом указанный технический результат достигается за счет реализации возможности размещения электродвигателей железнодорожного хода в опорных катках и натяжных колесах.
Реализация отличительного признака зависимого пункта формулы изобретения, предусматривающего наличие в составе системы управления контроллеров генератора и ДВС для регулирования тока возбуждения генератора и/или частоты вращения ДВС, в частности, из условия стабилизации величины и частоты выходного напряжения генератора, обеспечивает упрощение конструкции трактора-тягача за счет того, что эти контроллеры используются одновременно для регулирования источника энергии как для привода хода, так и для работы грузоподъемных механизмов. Это позволяет также повысить топливную экономичность трактора-тягача, поскольку потери энергии в цепях управления одним устройством меньше, чем в двух устройствах меньшей мощности.
В случае реализации следующего отличительного признака изобретения, согласно которому генератор выполнен асинхронным или синхронным трехфазным, частота и выходного напряжение которого выбраны или регулируются контроллером генератора и/или контроллером ДВС из условия обеспечения возможности подключения к этому генератору асинхронных и/или синхронных электродвигателей приводов механизмов грузоподъемной машины, тяговых электродвигателей и/или электродвигателей железнодорожного хода, обеспечивает упрощение конструкции трактора-тягача за счет обеспечения возможности прямого подключения электродвигателей к выходным клеммам генератора без дополнительных частотных преобразователей, а также повышение топливной экономичности трактора-тягача за счет исключения потерь энергии в этих преобразователях. С этой целью согласующее устройство может быть выполнено, в частности, в виде механического редуктора, ременной или цепной передачи с передаточным отношением, при котором частота вращения ДВС в его номинальном режиме или в режиме максимальной топливной экономичности соответствует частоте вращения генератора, при которой частота выходного напряжения генератора равна 50 Гц.
Этот же технический результат достигается при реализации следующих альтернативных отличительных признаков, согласно которым контроллер генератора дополнительно содержит силовой выпрямитель или силовой электронный коммутатор, обеспечивающий стабилизацию и выпрямление выходного напряжения генератора, а также включение в состав системы управления одного или нескольких контроллеров тяговых электродвигателей и/или электродвигателей железнодорожного хода, питание которых осуществляется постоянным напряжением. В данном случае упрощение конструкции и повышение топливной экономичности достигается за счет применения более простых по конструкции вентильно-индукторных электрических машин, обладающих, по сравнению с асинхронными электродвигателями более простой конструкцией (отсутствием обмоток на роторе) и более высоким КПД.
Оптимизация режимов работы ДВС с соответствующим повышением топливной экономичности трактора-тягача и упрощением его конструкции достигается также при реализации отличительных признаков зависимых пунктов формулы изобретения, согласно которым контроллер генератора выполнен с возможностью формирования трехфазного напряжения переменного тока с частотой, не зависящей от частоты вращения ДВС, например 50 Гц. В этом случае реализовано обеспечение электрической энергией асинхронных или синхронных электродвигателей привода (приводов) механизмов грузоподъемной машины, тяговых электродвигателей и/или электродвигателей железнодорожного хода при одновременном максимальном упрощении генератора и, соответственно, трактора-тягача. Независимость частоты выходного напряжения источника электрической энергии на тракторе-тягача от скорости вращения ДВС обеспечивает также возможность работы ДВС и, соответственно, трактора-тягача в режиме максимальной топливной экономичности.
Для достижения этой независимости, как указано в следующих отличительных признаках зависимых пунктов изобретения, может использоваться контроллер генератора, выполненный в виде силового выпрямителя, или силовой электронный коммутатор, обеспечивающий стабилизацию и выпрямление выходного напряжения генератора, и последовательно соединенный с ним инвертор, преобразующий постоянное выходное напряжение силового выпрямителя или силового электронного коммутатора в трехфазное напряжения переменного тока, в частности 380 В, 50 Гц. В этом случае указанный технический результат достигается за счет того, что при современном уровне развития техники формирование синусоидальных трехфазных напряжений переменного тока с помощью силовой электроники (инвертора на IGBT транзисторах) приводит к более простой и энергетически более эффективной конструкции по сравнению с формированием этих напряжений электрическими машинами.
В предложенном тракторе-тягаче может быть реализован как один из указанных альтернативных отличительных признаков независимого и зависимых пунктов формулы изобретения, так и одновременно несколько отличительных признаков в их любом сочетании. При этом реализация каждого из этих отличительных признаков находится в прямой причинно-следственной связи с достигаемым техническим результатом - с упрощением конструкции и повышением топливной экономичности гусеничного трактора-тягача, обеспечивающего перемещение грузоподъемной машины и снабжение электрической энергией приводов ее рабочих механизмов.
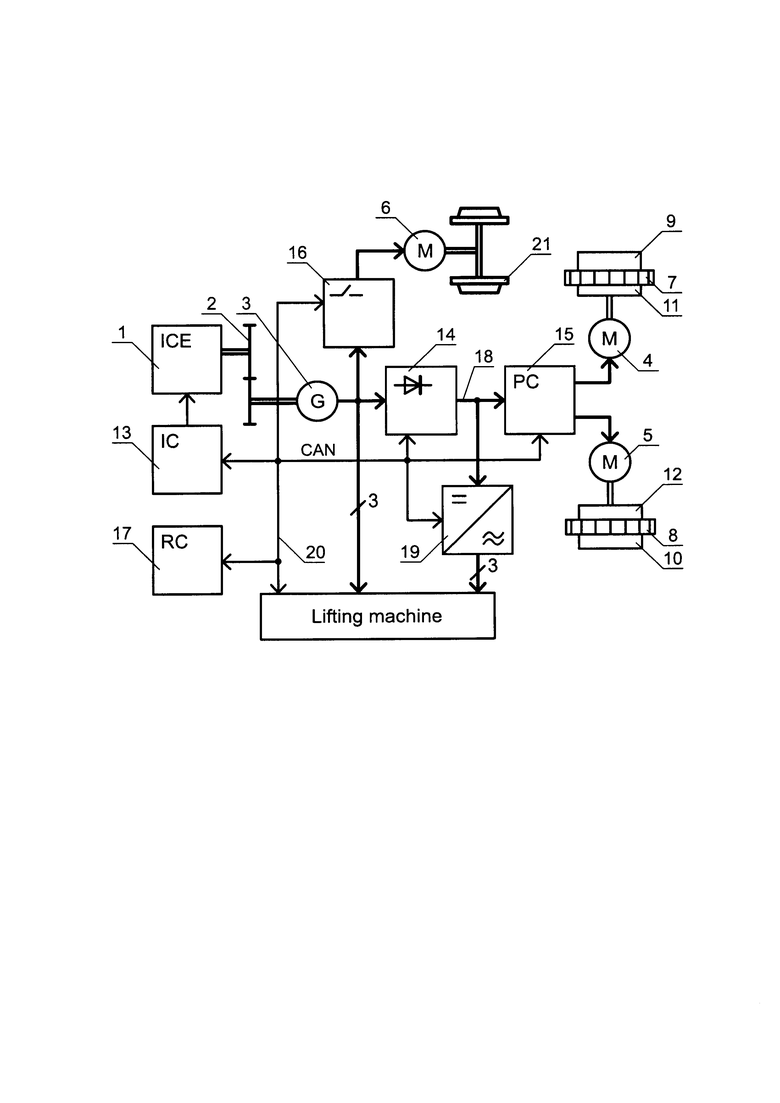
Для пояснения технической сущности, принципа действия и возможности осуществления предложенного устройства на чертеже в качестве примера показана упрощенная структурная схема трактора-тягача грузоподъемной машины с комбинированным ходом и электромеханической трансмиссией.
Грузоподъемная машина может быть выполнена в виде портального путеукладочного крана, трубоукладчика, стрелового крана, погрузчика, крано-манипуляторной установки (КМУ), бурильно-крановой машины и т.п.и имеет электрический привод по меньшей мере одного ее рабочего механизма, например, грузовой, стреловой или тяговой лебедки.
Соединение грузоподъемной машины с трактором-тягачом осуществляется, в частности, с помощью жесткого прицепного устройства или панели (задней плиты), установленной в задней части трактора-тягача.
Роль первичного источника энергии на нем выполняет приводной двигатель 1, выполненный в виде двигателя внутреннего сгорания (ДВС).
На чертеже показана последовательная кинематическая схема моторно-трансмиссионной установки трактора-тягача, которая исключает механическую связь ДВС с гусеничным движителем.
ДВС соединен с генератором 3 непосредственно или через согласующее или передаточное устройство - механическую упругую, упруго-деформируемую или компенсирующую муфту, карданный вал, механический редуктор (мультипликатор) 2, ременную или цепную передачу и т.п.
Согласующее устройство 2 может иметь передаточное отношение, отличающееся от единицы, в том числе таким, при котором частота вращения ДВС в его номинальном режиме или в режиме максимальной топливной экономичности соответствует скорости вращения генератора 3, при которой частота его выходного напряжения равна 50 Гц.
Например, если для получения частоты выходного напряжения генератора 50 Гц необходима скорость вращения ротора синхронного генератора 3000 об/мин или 1500 об/мин (при числе пар его полюсов 2Р или 4Р), а номинальная частота вращения ДВС составляет 2000 об/мин, то передаточное должно быть выбрано, соответственно, равным 0,67 или 1,33. Такое передаточное устройство является либо мультипликатором, либо понижающим редуктором (понижающей передачей).
Генератор является источником электрической энергии для одного или двух тяговых электродвигателей 4, 5, одного или нескольких электродвигателей железнодорожного хода 6, а также электродвигателей приводов механизмов грузоподъемной машины. Например, для электродвигателей приводов двух грузовых лебедок, тяговой лебедки, лебедки крана-укосины и водила портального путеукладочного крана (на чертеже условно не показаны).
Генератор 3 может быть синхронным с постоянными магнитами или обмоткой возбуждения на роторе (с вращающимся выпрямителем или с контактными кольцами) или на статоре, асинхронным или вентильно-индукторным.
Каждый из электродвигателей также может быть асинхронным, синхронным с постоянными магнитами на роторе или с обмоткой возбуждения, а также реактивным вентильно-индукторным. Для приводов механизмов грузоподъемной машины предпочтительным является применение асинхронных электродвигателей, а для тяговых электродвигателей и электродвигателей железнодорожного хода - вентильно-индукторных.
В последнем случае каждый из них содержит статор с полюсами и фазными обмотками, выполненными в виде сосредоточенных катушек, размещенных на полюсах шихтованного магнитопровода статора, и ротор с зубчатым магнитопроводом, также выполненным из листов электротехнической стали и закрепленным на его валу. Такие электродвигатели без обмотки возбуждения в русскоязычной литературе называются вентильными индукторными реактивными двигателями (ВРД, ВИД, ВИРД), а в англоязычной литературе - электродвигателями с переменным магнитным сопротивлением: «Switched Reluctance Motor (SRM)».
Тяговый генератор 3 может иметь конструкцию, аналогичную электродвигателям, или отличающуюся от них.
Выходные валы тяговых электродвигателей 4, 5 соединены с ведущими звездочками 7, 8 гусеничного движителя через передаточные устройства - бортовые редукторы 9, 10, карданные валы, муфты и т.д., которые могут быть о размещены у ведущих звездочек в пределах обвода гусениц, либо размещены в корпусе трактора-тягача.
Предпочтительным является применение маслонаполненных планетарных бортовых редукторов со встроенными гидравлически управляемыми нормально замкнутыми стояночными тормозами 11, 12.
В случае реализации электромеханической трансмиссии с одним тяговым электродвигателем, передаточные устройства, с помощью которых осуществляется передача механической энергии от тягового электродвигателя на гусеницы трактора-тягача, кроме бортовых редукторов 9, 10 содержат главную передачу с устройством дифференциального управления, либо с бортовыми фрикционами и рабочими тормозами, обеспечивающими возможность поворота трактора-тягача.
Система управления трактора-тягача, которая может именоваться также системой электрооборудования, электрической частью трансмиссии и т.п., в общем случае включает в себя высоковольтную и низковольтную части и содержит один или несколько контроллеров, преимущественно микропроцессорных, в частности, главный (ведущий) контроллер, контроллер ДВС 13, контроллер генератора 14, выполненный в виде силового выпрямителя или силового электронного коммутатора, контроллер тяговых электродвигателей 15, контроллер электродвигателей железнодорожного хода 16, контроллеры электродвигателей приводов грузоподъемной машины, панель оператора (машиниста, тракториста, водителя) 17, органы управления трансмиссией (движением трактора-тягача) и грузоподъемным оборудованием, датчики параметров работы электромеханической трансмиссии, ДВС и грузоподъемного оборудования, коммутационную и пускозащитную аппаратуру, дистанционный пульт управления, приборы низковольтного оборудования (электроснабжения, освещения, звуковой сигнализации и т.д.), розетку для подключения внешних потребителей и другие устройства, условно не показанные на чертеже.
Для преобразования постоянного напряжения на силовой шине 18 в трехфазное напряжение переменного тока система управления может содержать инвертор 19.
Контроллеры могут быть реализованы с использованием дискретных электронных компонентов, микросхем различной степени интеграции, а также микроконтроллеров (микропроцессоров, цифровых сигнальных процессоров). Эти контроллеры, в зависимости от их назначения и конструктивного исполнения, могут именоваться также блоками управления, управляющими устройствами, коммутаторами, силовыми электронными преобразователями, инверторами, блоками входов и нагрузок, информационно-управляющими блоками или устройствами и т.д.
Если какой-либо электродвигатель выполнен асинхронным и допускает подключение к выводам генератора 3 или инвертора 19 без преобразования частоты и величины этого напряжения, то контроллер этого электродвигателя может быть выполнен в виде устройства плавного пуска или релейно-контактного устройства управления этим электродвигателем.
Составные части системы управления (системы электрооборудования) связаны между собой мультиплексной линией передачи информационных сигналов 20, выполненной, предпочтительно, с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров), ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно также применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п.
Конструкция контроллера 14 генератора 5 зависит от конструкции этого генератора.
В случае применения асинхронного или синхронного генератора и использования выходного переменного напряжения этого генератора для передачи электрической энергии на один, несколько или на все электродвигатели трактора-тягача и грузоподъемной машины, контроллер генератора 14 выполнен в виде регулятора, осуществляющие регулирование тока возбуждения генератора и/или частоты вращения ДВС из условия стабилизации величины выходного напряжения генератора и его частоты. Это может осуществляться с помощью компонентов самого контроллера, а также путем передачи сигналов управления на контроллер ДВС 13 непосредственно или по шине CAN 20. В этом случае контроллер генератора содержит средства измерения величины и частоты выходного напряжения генератора, их сравнения с заданными величинами, а также формирования сигналов управления обмоткой возбуждения генератора 3 и сигналов управления частотой вращения ДВС, поступающий на контроллер ДВС 13 по шине CAN.
Если все электродвигатели на тракторе-тягаче и на грузоподъемной машине выполненными асинхронными или синхронными и могут работать от трехфазного напряжения переменного тока, например с напряжением 380 В и частотой 50 Гц, то выпрямители выходного напряжения генератора, шина постоянного тока 18 и инвертор 19 отсутствуют. В этом случае трехфазное выходное напряжение генератора поступает непосредственно на контроллеры электродвигателей, которые осуществляют коммутацию (включение/отключение) этого напряжения и, при необходимости, плавный пуск и динамическое торможение электродвигателей.
В противном случае контроллер генератора 14 кроме регулятора напряжения дополнительно содержит силовой управляемый, например, тиристорный, или неуправляемый выпрямитель, осуществляющих преобразование переменного выходного напряжения генератора в постоянное напряжение, поступающее на силовые шины 18.
К силовым шинам постоянного тока 18 может быть подключен накопитель энергии, выполненный на основе аккумуляторов и/или конденсаторов, а также тормозной резистор с его контроллером, обеспечивающим подключение этого резистора к шине при наличии перенапряжения на ней.
Контроллер генератора вместо силового выпрямителя может содержать силовой электронный коммутатор, обеспечивающий стабилизацию и выпрямление выходного напряжения генератора. Например, если генератор выполнен вентильно-индукторным, то силовой электронный коммутатор, выполненный на основе силовых IGBT ключей и диодов, соединенных по схеме асимметричного моста, осуществляет возбуждение генератора, а также выпрямление и стабилизацию его выходного напряжения, поступающего на шину постоянного тока 18. Аналогичным образом силовой электронный коммутатор, выполненный на основе силовых IGBT ключей и диодов, соединенных по схеме симметричного моста, может осуществлять возбуждение асинхронного генератора, а также выпрямление и стабилизацию его выходного напряжения.
В этих случаях контроллер генератора 14 может осуществлять также коммутацию его обмоток при работе генератора 3 в режиме электродвигателя при запуске ДВС и при работе трансмиссии в режиме торможения трактора-тягача двигателем.
Контроллеры электродвигателей (силовые электронные преобразователи), если они подключены к шине постоянного тока 18, предназначены для преобразования постоянного напряжения на этих шинах в многофазное переменное напряжение или однополярные импульсы, поступающие на фазные обмотки тяговых электродвигателей 4, 5, электродвигателей железнодорожного хода 6 и приводов грузоподъемной машины, а также для их обратного преобразования в постоянное напряжение при работе этих электродвигателей в генераторном режиме при торможении трактора-тягача или грузоподъемных механизмов. Они содержат силовые электронные ключи, выполненные на основе биполярных транзисторов с изолированным затвором (БТИЗ, IGBT) или IGBT (БТИЗ) модулей, гальванически развязанные драйверы этих транзисторов (модулей), микроконтроллеры или цифровые сигнальные процессоры, а также интерфейсные устройства, приспособленные для управления силовыми электронными ключами и для обмена информацией между контроллерами, органами управления, панелью оператора 17 и датчиками. Этом обмен осуществляется непосредственно (по отдельным проводам) или по шине CAN, LIN и т.п.
Для каждого электродвигателя может используется отдельный контроллер (силовой электронный преобразователь, инвертор, коммутатор). Возможна также установка нескольких контроллеров, работающих на один электродвигатель, например, при дроблении мощности по секциям статора электродвигателя, либо установка общего контроллера на несколько электродвигателей.
В зависимости от выполняемых функций и требований к компоновке трактора-тягача возможно раздельное исполнение контроллеров, а также их объединение в несколько блоков или в единый блок (контроллер, модуль). Возможно также размещение в одном корпусе контроллера генератора (силового выпрямителя) 15 с генератором 3, а также размещение контроллеров электродвигателй в корпусах этих электродвигателей.
Контроллеры электродвигателей могут иметь встроенные силовые выпрямители. Например, в качестве электродвигателя железнодорожного хода 6 может использоваться вентильно-индукторный электродвигатель с электрическим питанием контроллера этого электродвигателя от трехфазного напряжения переменного тока, как это показано на чертеже. В этом случае контроллер электродвигателя железнодорожного хода 16 содержит встроенный выпрямитель выходного напряжения генератора и коммутатор фазных обмоток, реализованный по схеме асимметричного моста. Если же используется асинхронный электродвигатель 6, то контроллер 16 может быть выполнен в виде электромагнитного пускателя, устройства плавного пуска и т.д., не предполагающего изменений частоты и величины напряжения в установившемся режиме работы этого электродвигателя.
Аналогичным образом для питания электродвигателей приводов грузоподъемных механизмов может использоваться как постоянного напряжение с шины 18, так и переменное напряжение с выхода генератора 3 или инвертора 19. Соответственно, в зависимости от типа используемого электродвигателя (асинхронный, синхронный, вентильно-индукторный и т.д.) в этих приводах устанавливается соответствующий контроллер - с шиной постоянного тока, в частности формируемой в самом контроллере, или без этой шины.
Аппаратные и программные ресурсы контроллеров системы управления (производительность их микропроцессоров, объем оперативной памяти и памяти программ, количество входных и выходных аналоговых и дискретных входов/выходов и т.д.) выбраны из условия реализации не только управления электродвигателями, в том числе векторного, но и дополнительных функций, необходимых для обеспечения соответствия трактора-тягача и грузоподъемной машины установленным к ним требованиям. В том числе функций защиты грузоподъемных механизмов от перегрузки, их отключения при достижении предельных (крайних) положений (в частности, предельной высоты грузозахватного органа), защиты от падения груза при обрыве любой из трех фаз питающего напряжения, защиты от перегрева электродвигателей и элементов силовой электроники контроллеров, плавного разгона/торможения, подъема/опускания и перемещения механизмов, автоматическое включения тормозов при остановке электродвигателей, диагностики и регистрации режимов работы составных частей трактора-тягача и грузоподъемной машины, дистанционного управления и т.д.
Комбинированный гусеничный и железнодорожный ход трактора-тягача может быть реализован путем применения универсальных тележек гусениц, отличающихся измененной конструкцией звеньев гусениц и дополнительными опорными катками. В этом случае трактор-тягач передвигается по железнодорожному пути за счет взаимодействия гусениц с рельсами.
Возможна также реализация железнодорожного хода с использованием приводных рельсовых колес 21 и, при необходимости, дополнительных направляющих рельсовых колеса. Гусеничный движитель при этом находится над рельсами, а приводные колеса, взаимодействуя с рельсами, приводят трактор-тягач в движение. При этом могут быть реализованы мотор-колеса, содержащие электродвигатели железнодорожного хода, колесные редукторы и тормоза, встроенные в эти колеса. Подъем и опускание приводных и направляющих рельсовых колес осуществляется с помощью электрогидравлического или электромеханического привода под управлением соответствующего контролера, сигналы на который поступают по шине CAN.
Для формирования сигналов управления движением трактора-тягача и работой грузоподъемных механизмов в состав системы управления входят органы управления трактором-тягачом и грузоподъемной машиной. Они включают в себя аппарат управления движением трактора-тягача (джойстик, рулевое колесо и т.п.), ключ запуска ДВС 1, джойстики или рычаги управления грузоподъемными механизмами, клавишные и кнопочные переключатели, рукоятку управления подачей топлива, педали тормоза и акселератора и/или десселератора, органы управления микроклиматом в кабине трактора-тягача и т.д. Сигналы управления передаются в системе непосредственно на другие составные части системы управления (по отдельным проводам), по шине CAN или через главный (ведущий) контроллер.
Панель оператора 17, именуемая также панелью контрольно-измерительных приборов, комбинацией приборов, блоком индикации, блоком отображения информации и т.п., выполнена в виде набора электромеханических указателей, графической панели, световых сигнализаторов и т.п.Она обеспечивает отображение параметров работы трактора-тягача и грузоподъемного оборудования (напряжения и частоты генератора, частоты вращения ДВС, нагрузки на грузоподъемные механизмы и т.д.) а также формирование аварийных и предупредительных звуковых и/или световых сигналов для оператора (машиниста, тракториста), в том числе от внешних устройств. Например, отображение команд «Вперед-Назад» от старшего оператора путеукладочного крана.
Панель оператора 17 может быть выполнена в виде отдельного блока или совмещена с одним из контроллеров.
Датчики, входящие в состав системы управления, предназначены для контроля параметров работы трактора-тягача, в том числе ее ДВС и трансмиссии, и механизмов грузоподъемной машины. К ним относятся датчики температуры, давления и уровня рабочих жидкостей (масла, топлива, охлаждающей жидкости ДВС) в трансмиссии и ДВС, датчики продольного и поперечного наклона (креномеры), положения грузозахватных органов, усилия подъема и перемещения грузов и т.д.
Предложенный гусеничный трактор-тягач работает следующим образом.
Оператор (тракторист, машинист, водитель) при помощи органов управления осуществляет запуск ДВС и задает рабочую скорость и направление движения трактора-тягача.
ДВС непосредственно или через согласующий редуктор/мультипликатор 2 приводит во вращение ротор тягового генератора 3.
Контроллер генератора 14 осуществляет выпрямление и стабилизацию напряжения на силовых шинах 18, осуществляя управление генератором, контроллером ДВС 13 и силовым (тиристорным) выпрямителем (в случае необходимости). Напряжение с силовых шин 18 поступает на контроллер 15 тяговых электродвигателей 4, 5.
Главный контроллер (ведущий контроллер, контроллер верхнего уровня) осуществляет координацию работы всех составных частей системы управления (системы электрооборудования) трактора-тягача, в том числе ее контроллеров, в зависимости от сигналов с органов управления и с датчиков.
Прочие контроллеры получают сигналы управления от главного (ведущего, системного) контроллера по сети CAN, а также, в случае необходимости (например, в аварийных режимах работы трактора-тягача), непосредственно от органов управления или от других составных частей системы управления.
Алгоритмы взаимосвязанного и автоматизированного управления составными частями системы управления трактора-тягача, включая их взаимодействие, предварительно определяются расчетным или экспериментальным путем, записываются в память контроллеров и далее программно реализуются микроконтроллерами, входящим в их состав.
Контроллер тяговых электродвигателей 15 преобразует напряжение постоянного тока на силовых шинах 18 в переменное напряжение или в однополярные импульсы регулируемой частоты и скважности, поступающие на фазные обмотки тяговых электродвигателей 4, 5. Крутящий момент, создаваемый тяговыми электродвигателями, непосредственно или через дополнительные передаточные устройства (муфты, торсионы, бортовые редукторы 9, 10 и т.п.) предается на ведущие звездочки 7, 8 гусениц, в результате чего осуществляется движение трактора-тягача в соответствии с направлением и скоростью, заданными оператором. Благодаря этому грузоподъемная машина трактором-тягачом доставляется к месту производства работ.
Движение трактора-тягача с универсальными тележками гусениц по железной дороге осуществляется аналогичным образом. В этом случае, если трактор-тягач имеет приводные рельсовые колеса или мотор-колеса, то перед началом движения по железной дороге оператор дает команду на их опускание, после чего контроллер электродвигателей железнодорожного хода 16 формирует переменное напряжение или однополярные импульсы, поступающие на обмотки этих электродвигателей 6, приводя трактор-тягач в движение.
При торможении трактора-тягача тяговые электродвигатели или электродвигатели железнодорожного хода работают в генераторном режиме. Энергия торможения с этих электродвигателей через контроллеры 15 или 16 передается на силовые шины 18 и в накопитель энергии (если он установлен на тракторе-тягаче), в ДВС через генератор 3, а также, в случае необходимости, рассеивается в тормозном резисторе.
Питание контроллеров тяговых электродвигателей и электродвигателей железнодорожного хода, в зависимости от исполнения этих контроллеров и электродвигателей, может также осуществляться трехфазным напряжением переменного тока. В этом случае либо генератор формирует трехфазное напряжение переменного тока, например с напряжением 380 В и частотой 50 Гц, либо для формирования такого напряжения в состав системы управления входит инвертор 18.
Генератор 3 обеспечивает электрической энергией как приводы хода (тяговые электродвигатели и электродвигатели железнодорожного хода), так и электродвигатели приводов механизмов грузоподъемной машины.
На тракторе-тягаче могут использоваться различные типы тяговых электродвигателей, электродвигателей железнодорожного хода и электродвигателей приводов механизмов грузоподъемной машины в их любом сочетании. Выбор их типов осуществляется из условия упрощения конструкции и достижения максимальной топливной экономичности гусеничного трактора-тягача.
Напряжение питания на контроллеры этих электродвигателей, в зависимости от их конструктивного исполнения, подается с шины постоянного тока 18 или непосредственно с выводов генератора 3 или инвертора 19, а сигналы управления потоками мощности - по шине CAN.
Одновременно система управления, в соответствии с программами работы ее контроллеров, реализует функции диагностики, контроля и регистрации параметров работы, дистанционного управления и защиты узлов и механизмов трактора-тягача и грузоподъемной машины.
Для специалистов в данной области техники также понятно, что кроме описанных вариантов гусеничного трактора-тягача грузоподъемной машины возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
Изобретение относится к тяговым транспортным средствам. Гусеничный трактор-тягач грузоподъемной машины содержит ходовую часть, ДВС, генератор, который непосредственно или через согласующее устройство механически соединен с ДВС и приспособлен для преобразования части его механической энергии в электрическую энергию и для обеспечения электрической энергией электродвигателя привода грузоподъемной машины. Трактор выполнен с электромеханической трансмиссией, содержащей тяговый электродвигатель. Генератор выполнен с возможностью обеспечения этой трансмиссии электрической энергией. В систему управления входит контроллер генератора и/или контроллер ДВС. Упрощается конструкция и повышается топливная экономичность. 12 з.п. ф-лы, 1 ил.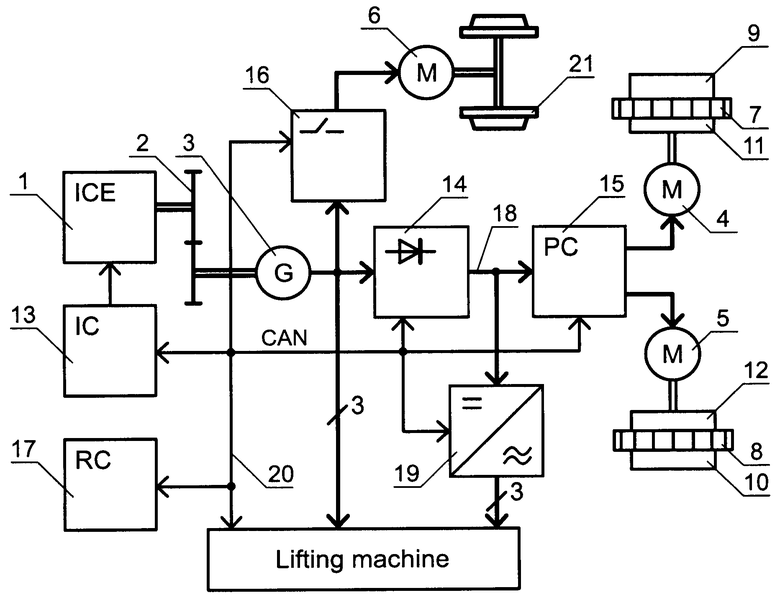
1. Гусеничный трактор-тягач грузоподъемной машины, содержащий ходовую часть, ДВС, генератор, который непосредственно или через согласующее устройство механически соединен с ДВС и приспособлен для преобразования по меньшей части его механической энергии в электрическую энергию и для обеспечения электрической энергией по меньшей мере одного электродвигателя привода грузоподъемной машины, и систему управления, отличающийся тем, что он выполнен с электромеханической трансмиссией, содержащей по меньшей мере один тяговый электродвигатель, а генератор выполнен с возможностью обеспечения этой трансмиссии электрической энергией, причем в состав системы управления входит по меньшей мере один контроллер генератора и/или контроллер ДВС.
2. Гусеничный трактор-тягач по п. 1, отличающийся тем, что он выполнен с комбинированным гусеничным и железнодорожным ходом и содержит универсальные тележки гусениц или приводные рельсовые колеса или мотор-колеса, соединенные с электродвигателями железнодорожного хода или содержащие эти электродвигатели, а генератор выполнен с возможностью их обеспечения электрической энергией.
3. Гусеничный трактор-тягач по п. 2, отличающийся тем, что приводные рельсовые мотор-колеса содержат электродвигатели железнодорожного хода, колесные редукторы и тормоза.
4. Гусеничный трактор-тягач по п. 1, отличающийся тем, что согласующее устройство выполнено в виде механического редуктора, или ременной, или цепной передачи с передаточным отношением, при котором частота вращения ДВС в номинальном режиме его работы или в режиме максимальной топливной экономичности соответствует скорости вращения генератора, при которой частота его выходного напряжения равна 50 Гц.
5. Гусеничный трактор-тягач по п. 1, отличающийся тем, что контроллер генератора и/или контроллер ДВС выполнен с возможностью стабилизации величины выходного напряжения генератора, и/или частоты выходного напряжения генератора, и/или частоты вращения ДВС.
6. Гусеничный трактор-тягач по п. 1, отличающийся тем, что он содержит асинхронный или синхронный трехфазный генератор переменного тока, частота и напряжение которого выбраны или регулируются контроллером генератора и/или контроллером ДВС из условия обеспечения возможности подключения к этому генератору по меньшей мере одного асинхронного или синхронного электродвигателя привода грузоподъемной машины, и/или тягового электродвигателя, и/или электродвигателя железнодорожного хода.
7. Гусеничный трактор-тягач по одному из пп. 1, 5 или 6, отличающийся тем, что контроллер генератора содержит силовой выпрямитель или силовой электронный коммутатор, выполненный с возможностью стабилизации и выпрямления выходного напряжения генератора, а в состав системы управления входит по меньшей мере один контроллер тягового электродвигателя, или электродвигателя железнодорожного хода, или электродвигателя привода грузоподъемной машины, выполненный с возможностью преобразования и передачи электрической энергии постоянного тока с выхода выпрямителя или силового электронного коммутатора на этот электродвигатель.
8. Гусеничный трактор-тягач по одному из пп. 1, 5 или 6, отличающийся тем, что контроллер генератора выполнен с возможностью формирования трехфазного напряжения переменного тока с частотой, не зависящей от скорости вращения коленчатого вала ДВС, и приспособлен для обеспечения электрической энергией по меньшей мере одного асинхронного или синхронного электродвигателя привода грузоподъемной машины, и/или тягового электродвигателя, и/или электродвигателя железнодорожного хода.
9. Гусеничный трактор-тягач по п. 8, отличающийся тем, что контроллер генератора содержит силовой выпрямитель выходного напряжения генератора или силовой электронный коммутатор, выполненный с возможностью стабилизации и выпрямления выходного напряжения генератора, а в состав системы управления входит инвертор, соединенный с выходом силового выпрямителя или силового электронного коммутатора и выполненный с возможностью формирования трехфазного напряжения переменного тока.
10. Гусеничный трактор-тягач по п. 9, отличающийся тем, что инвертор выполнен с возможностью формирования трехфазного напряжения переменного тока 380 В с частотой 50 Гц и имеет выходную мощность, достаточную для подключения к нему всех асинхронных и/или синхронных электродвигателей, установленных на гусеничном тракторе-тягаче и грузоподъемной машине.
11. Гусеничный трактор-тягач по одному из пп. 1, 6, 9 или 10, отличающийся тем, что генератор выполнен вентильно-индукторным, или синхронным с постоянными магнитами на роторе, или синхронным с обмоткой возбуждения на роторе или статоре, а силовой электронный коммутатор реализован на основе силовых транзисторных ключей или модулей по несимметричной или симметричной мостовой схеме с обратными диодами, обеспечивающими возможность реализации силового выпрямителя.
12. Гусеничный трактор-тягач по одному из пп. 1, 2 или 3, отличающийся тем, что по меньшей мере один тяговый электродвигатель, и/или электродвигатель привода грузоподъемной машины, и/или электродвигатель железнодорожного хода выполнен вентильно-индукторным.
13. Гусеничный трактор-тягач по п. 1, отличающийся тем, что грузоподъемная машина выполнена в виде портального путеукладочного крана, или трубоукладчика, или стрелового крана, или погрузчика, или крано-манипуляторной установки, или бурильно-крановой машины.
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| Прицепной тракторный путеукладчик на гусеничном ходу | 1961 |
|
SU147208A1 |
| В.Н | |||
| Коротков и др | |||
| Путевые машины и механизмы | |||
| Отраслевой каталог | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Часть I | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| с ил | |||
| МОТОРНО-ТРАНСМИССИОННАЯ УСТАНОВКА РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2558416C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ТРАКТОРА | 2013 |
|
RU2531531C1 |

