УРОВЕНЬ ТЕХНИКИ
[0001] Сущность изобретения, описанного здесь, относится к технике измерения и контроля осевых вибраций для идентификации несоосности в турбомашинных установках.
[0002] Турбомашинные установки содержат набор компонентов, имеющих последовательно соединенные вращающиеся валы. Обычный пример - это турбогенератор, который в простейшем виде содержит турбину, имеющую вращающийся вал (то есть ротор), напрямую соединенный с вращающимся валом электрогенератора, для генерирования электроэнергии. Более сложные турбогенераторные установки, например, такие, которые используются в области генерирования энергии, часто содержат несколько больших компонентов, имеющих вращающиеся валы, соединенные последовательно. Например, обычная конфигурация может содержать турбину высокого давления, имеющую вращающийся вал, соединенный с вращающимся валом турбины низкого давления, который, в свою очередь, соединен с вращающимся валом генератора.
[0003] При реализации такой механической цепочки крайне важно, чтобы вращающиеся валы каждого компонента работали прецизионно во избежание повреждения роторов или подшипников. Например, одной стандартной проблемой в такой конфигурации является разбалансированность вала, когда один из валов «дрожит». Этот дефект обычно обнаруживается с помощью измерения радиальных (то есть направленных наружу) вибраций, с использованием, например, пьезоэлектрических датчиков. Однако такие вибрации могут также возникать из-за несоосных валов, что также может вызвать повреждения роторов или подшипника.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Варианты осуществления данного изобретения описывают решения для идентификации несоосных валов, соединенных в турбомашинную установку.
[0005] Первый аспект данного изобретения предлагает систему для определения несоосности валов в установке из компонентов с последовательно соединенными вращающимися валами, содержащую: датчик, прикрепленный к компоненту установки вблизи вращающегося вала, при этом упомянутый датчик собирает данные о вибрации вдоль направления оси вращающегося вала; частотный анализатор для формирования данных в частотной области из данных вибрации; и систему анализа для анализа частотного компонента данных в частотной области на однократной частоте вращения вращающегося вала для идентификации несоосности между вращающимся валом и соединенным с ним другим вращающимся валом.
[0006] Второй аспект данного изобретения предлагает установку из множества компонентов с последовательно соединенными вращающимися валами, содержащую датчик, прикрепленный по меньшей мере к одному упомянутому компоненту вблизи вращающегося вала, при этом упомянутый датчик собирает данные о вибрации вдоль направления оси вращающегося вала; частотный анализатор для формирования данных в частотной области из данных вибрации; и систему анализа для анализа частотного компонента данных в частотной области на однократной частоте вращения вращающегося вала для идентификации несоосности между вращающимся валом и соединенным с ним другим вращающимся валом.
[0007] Третий аспект данного изобретения предлагает устройство для определения несоосности валов в установке из компонентов с последовательно соединенными вращающимися валами, содержащее: датчик, прикрепленный к компоненту упомянутой установки вблизи вращающегося вала, при этом упомянутый датчик собирает данные о вибрации вдоль направления оси вращающегося вала; частотный анализатор для формирования данных в частотной области из данных вибрации; и систему анализа для анализа данных в частотной области для формирования информации о соосности вращающегося вала по отношению к соединенному с ним другому вращающемуся валу.
[0008] Иллюстративные аспекты настоящего изобретения предназначены для решения проблем, описанных здесь, и/или других проблем, здесь не описанных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Эти и другие возможности данного изобретения станут более ясными для понимания из следующего подробного описания различных аспектов изобретения, вместе с соответствующими чертежами, показывающими различные варианты осуществления изобретения, на которых:
[0010] на фиг.1 показана турбомашинная установка в соответствии с иллюстративным вариантом осуществления изобретения;
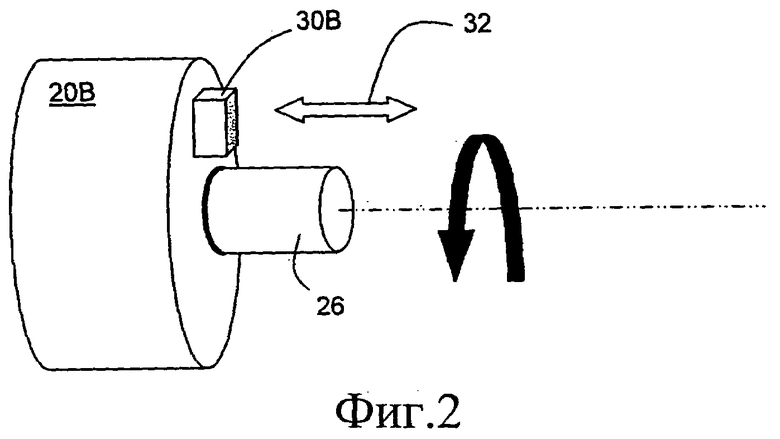
[0011] на фиг.2 изображена в изометрии схема, показывающая датчик, размещенный на корпусе подшипника, для измерения осевой вибрации, в соответствии с иллюстративным вариантом осуществления; и
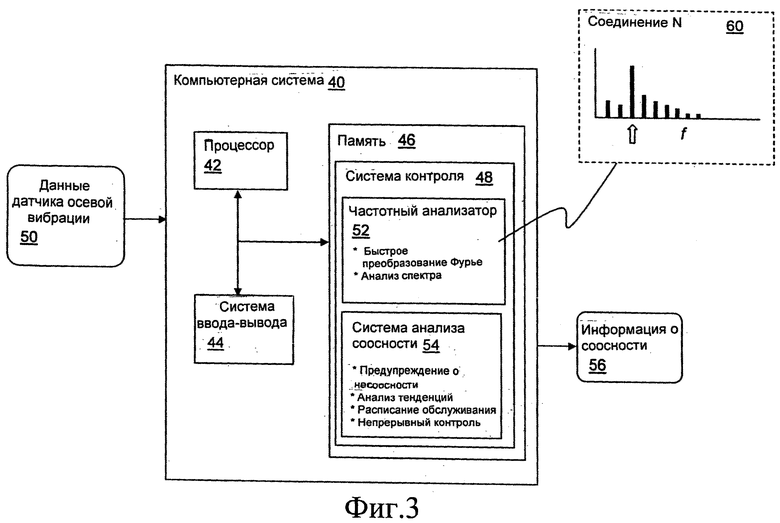
[0012] на фиг.3 показана компьютерная система для обработки данных осевой вибрации, в соответствии с иллюстративным вариантом осуществления.
[0013] Необходимо отметить, что чертежи в описании даны не в истинном масштабе. Эти чертежи предназначены для описания только основных аспектов изобретения и поэтому не должны рассматриваться как ограничивающие рамки данного изобретения. В чертежах одни и те же позиции представляют одинаковые элементы на всех чертежах.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0014] Представленные варианты осуществления описывают решения для идентификации несоосных валов в турбомашинной установке. На фиг.1 показана установка 10, которая содержит три компонента 12, 14 и 16, каждый их которых имеет соответствующий вращающийся вал 24, 26, 28, последовательно соединенный с соседним компонентом. Компоненты 12, 14 и 16 могут содержать любой тип машины, имеющей последовательно соединенные вращающиеся валы. Например, турбомашинная установка 10 может содержать турбогенератор, в котором компонентом 12 является турбина высокого давления, компонентом 14 является турбина низкого давления и компонентом 16 является генератор. В другом варианте осуществления компоненты могут содержать муфту и/или любое другое устройство с вращающимся валом. В дополнение к сказанному, очевидно, что турбомашинная установка 10 может содержать любое число или типы компонентов, то есть два или более, в которых есть по меньшей мере два вала, соединенных вместе.
[0015] В дополнение к вращающемуся валу, каждый компонент 12, 14 и 16 может содержать корпус 18A/18B, 20A/20B и 22A/22B подшипника, соответственно. Корпуса подшипников содержат подшипники, которые удерживают вал компонента на месте и позволяют осуществлять направленное относительное вращательное движение вала по отношению к компоненту.
[0016] В примере, показанном на фиг.1, можно видеть, что вал 28 несоосен по отношению к валу 26 в соединении N между корпусами 20B и 22A подшипников. Как было отмечено, такая несоосность может вызвать повреждение соответствующих подшипников и/или роторов. Этот дефект может быть особенно серьезным в случае, когда один из участвующих компонентов является муфтой, в которой может возникнуть разрыв соединения между валами и которая обычно очень чувствительна к несоосности. Необходимо заметить, что поскольку компоненты 12, 14 и 16 обычно помещены в закрытый узел (например, как показано пунктирной линией), а стоимость исправления таких дефектов высока, то правильная идентификация несоосностей вала может обеспечить существенное улучшение в любых условиях процесса контроля.
[0017] Для решения этой задачи к поверхности по меньшей мере одного корпуса 18B, 20B и 22B подшипника прикреплены датчики 30A, 30B, 30C осевой вибрации. В этом примере один датчик осевой вибрации расположен на каждом стыке, в котором соединены валы соседних компонентов. Необходимо заметить, что может быть использовано любое число или расположение датчиков, например, для обеспечения избыточности. Как описано более подробно далее, несоосность между двумя соединенными валами может быть оценена путем анализа осевой вибрации корпусов подшипников вблизи вала.
[0018] Фиг.2 показывает крупным планом корпус 20B подшипника, вал 26 и датчик 30 осевой вибрации. Как можно заметить, датчик 30 осевой вибрации собирает данные вибрации вдоль направления оси вала 26, как показано стрелкой 32. Необходимо отметить, что расположение, число и тип датчиков осевой вибрации может варьироваться в зависимости от конкретного применения. В одном иллюстративном варианте осуществления датчик 30B осевой вибрации использует пьезоэлектрический датчик, который постоянно размещен или закреплен на корпусе 20B, для приема постоянного потока данных осевой вибрации. В другом варианте осуществления датчик 30B осевой вибрации может быть размещен в каком-либо другом месте вместо корпуса 20B, например, на основании, совмещен с частью компонента и т.п.
[0019] Фиг.3 показывает компьютерную систему 40, имеющую систему 48 контроля для обработки данных 50 датчика осевой вибрации и вывода информации 56 о соосности. Данные 50 датчика осевой вибрации могут быть собраны от датчиков 30A, 30B и 30C осевой вибрации (фиг.1 и 2) любым способом, например, проводным или беспроводным, аналоговым или цифровым, и т.д. Система 48 контроля, которая принимает данные 50 датчика осевой вибрации как непрерывные или периодические данные во временной области, обычно содержит: (1) частотный анализатор 52, который преобразует данные датчика осевой вибрации во временной области в данные в частотной области; и (2) система 54 анализа соосности, которая анализирует данные в частотной области для обеспечения информации 56 о соосности.
[0020] Частотный анализатор может использовать любую технику для получения данных в частотной области, например, преобразование Фурье, быстрое преобразование Фурье (FFT), спектральный анализ (например, кепстральный анализ), Z-преобразование и т.д. Прямоугольник 60 отображает иллюстративный частотный анализ для соединения N (фиг.1, валы 26 и 28), где графически показаны амплитуды различных частотных компонентов. Для идентификации несоосностей системой 54 анализа соосности оценивается частотный компонент на однократной (1х) частоте вращения вала (показана стрелкой). Несоосности идентифицируются, если частотный компонент на однократной (1х) частоте вращения вала содержит доминирующий пик амплитуды вибрации, что имеет место в примере, показанном для соединения N.
[0021] В дополнение к идентификации несоосности, система 54 анализа соосности может осуществлять вспомогательные функции, например, генерацию предупреждений, выполнение анализа тенденций, например, для предсказания будущих несоосностей, обеспечение графика обслуживания для несоосных валов, обеспечение непрерывного анализа в реальном времени и т.д.
[0022] Очевидно, что компьютерная система 40 может быть реализована с использованием любого типа вычислительного устройства. Такое вычислительное устройство обычно содержит процессор 42, интерфейс ввода-вывода (I/O) 44, память 46 и шину. Процессор 42 может содержать единый процессорный узел или быть распределен по одному или более процессорному узлу в одном или более мест, например, на месте клиента или сервера. Память 46 может использовать любой известный тип хранения данных, включая магнитный носитель, оптический носитель, память с произвольным доступом (RAM), память только для чтения (ROM), кэш данных, объект данных и т.д. Более того, память может располагаться в одном физическом месте, содержать один или более типов хранения данных, или быть распределенной по множеству физических систем в различных формах.
[0023] Интерфейс ввода-вывода (I/O) 44 может содержать любую систему для обмена информацией к/от внешнего ресурса. Внешние устройства/ресурсы могут содержать любой тип внешнего устройства, включая датчики, монитор/дисплей, громкоговорители, накопители, другие компьютерные системы, наладонные устройства, клавиатуру, мышь, систему распознавания речи, систему вывода речи, принтер, факсимильный аппарат, пейджер и т.д. Шина обеспечивает канал связи между каждым компонентом в компьютерном устройстве и также может содержать любой тип канала связи, включая электрический, оптический, беспроводной и т.д. Хотя на чертежах таковые не показаны, могут присутствовать дополнительные компоненты, например, кэш-память, системы связи, системное программное обеспечение и т.д.
[0024] Доступ может быть обеспечен посредством сети, например, сети Интернет, локальной сети (LAN), сети широкого доступа (WAN), виртуальной частной сети (VPN) и т.д. Связь может осуществляться посредством прямого фиксированного соединения (например, последовательный порт) или посредством адресного соединения, которое может использовать любую комбинацию проводных и/или беспроводных способов связи. Более того, может быть использовано общеизвестное сетевое соединение, например, сеть с маркерным кольцом, сеть Ethernet, беспроводная сеть (WiFi) или другие общеизвестные стандарты связи. Соединение может также осуществляться известными TCP/IP протоколами на базе сокетов.
[0025] Понятно, что описанные возможности, в дополнение к реализации в виде системы или способа, могут быть реализованы как один или более программный продукт на машиночитаемом носителе, исполнение которого дает возможность компьютерной системе 40 генерировать информацию о соосности. В этом смысле машиночитаемый носитель информации может содержать программный код, который реализует процессы и системы, описанные здесь. Очевидно, что термин «машиночитаемый носитель информации» включает один или более любых типов физического осуществления программного кода. В частности, машиночитаемый носитель информации может содержать программный код, размещенный на одном или более портативном средстве хранения информации (например, компакт-диск, магнитный диск, лента и т.д.), на одном или более элементе для хранения данных вычислительного устройства, например, памяти и/или системы хранения.
[0026] Очевидно, что используемый здесь термин «программный код» и «компьютерный программный код» являются синонимами и означают любое выражение, на любом языке, в любом коде или нотации, из набора инструкций, которые приводят к исполнению компьютерным устройством, имеющим возможности обработки информации, конкретных функций, либо напрямую, либо после любой комбинации следующего: (a) преобразование в другой язык, код или нотацию; (b) воспроизведение в другой материальной форме; и/или (c) распаковка. В этом смысле программный код может быть реализован как один или более типов программного продукта, например, приложение/программное обеспечение, компонент программного обеспечения/библиотека функций, операционная система, основная система ввода/вывода/драйвер для конкретных вычислений и/или устройство ввода-вывода, и т.п. Кроме того, понятно, что такие термины как «компонент», «подсистема» и «система» являются здесь синонимами и представляют любую комбинацию аппаратного обеспечения и/или программного обеспечения, способного выполнять некоторую функцию (функции).
[0027] Блок-схемы на чертежах показывают архитектуру, функциональность и работу возможных реализаций систем, способов и компьютерных программных продуктов, в соответствии с различными вариантами осуществления настоящего изобретения. В этом смысле каждый блок на блок-схемах может представлять модуль, сегмент или часть кода, которая содержит одну или более исполняемых инструкций для реализации определенной логической функции (функций). Также необходимо отметить, что функции, отмеченные в блоках, могут выполняться не в том порядке, который указан на чертежах. Например, два блока, показанных один за другим, могут на самом деле работать одновременно, также блоки могут иногда запускаться в обратном порядке, в зависимости от необходимых функциональных возможностей. Также нужно отметить, что каждый блок блок-схемы может быть реализован специализированной аппаратной системой, которая выполняет специальные функции или действия, или комбинацией специализированной аппаратной системы и компьютерных инструкций.
[0028] Терминология, используемая здесь, применяется только с целью описания конкретных вариантов осуществления и не ограничивает изобретение. Используемые здесь формы единственного числа также подразумевают формы множественного числа, если иное явно не отмечено в контексте. Также понятно, что термины «содержит» и/или «содержащие», при использовании в этом контексте, определяют наличие заявленных возможностей, сущностей, этапов, операций, элементов и/или компонентов, но не препятствуют наличию или добавлению одной или более других возможностей, сущностей, этапов, операций, элементов, компонентов и/или групп всего перечисленного.
[0029] Соответствующие структуры, материалы, действия и эквиваленты всех средств или этапов плюс функциональные элементы в нижеприведенной формуле изобретения могут включать любую структуру, материал или действие для выполнения функции, в комбинации с другими конкретно указанными элементами. Описание настоящего изобретения приведено для иллюстративных и описательных целей, но не является исчерпывающим или ограничивающим данное изобретение в представленном варианте. Специалистам будут очевидны множество модификаций и вариаций, без выхода за рамки данного изобретения. Данный вариант осуществления был выбран и описан с целью наилучшего объяснения принципов изобретения и практического применения, а также для того, чтобы другие специалисты могли понять данное изобретение в различных вариантах осуществления с различными модификациями, подходящими к конкретному предполагаемому применению.
Список обозначений
10 - турбомашинная установка
12, 14, 16 - компоненты
18A/18B, 20A/20B, 22A/22B - корпус подшипника
24, 26, 28 - вращающийся вал
30A, 30B, 30C - датчик осевой вибрации
32 - осевое направление
40 - компьютерная система
42 - процессор
44 - интерфейс ввода/вывода
46 - память
48 - система контроля
50 - данные датчика осевых вибраций
52 - частотный анализатор
54 - система анализа соосности
56 - информация о соосности.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРОБКА ПРИВОДОВ | 2015 |
|
RU2666265C2 |
| ОБНАРУЖЕНИЕ КОНТАКТА И БЛИЗОСТИ МЕЖДУ АБЛЯЦИОННЫМИ ЭЛЕКТРОДАМИ ПОСРЕДСТВОМ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЙ В МОРФОЛОГИИ НАПРЯЖЕНИЯ НЕАКТИВИРОВАННЫХ ЭЛЕКТРОДОВ | 2021 |
|
RU2771155C1 |
| АРХИТЕКТУРА СИСТЕМ МОНИТОРИНГА СОСТОЯНИЯ ЗДОРОВЬЯ | 2008 |
|
RU2493591C2 |
| СПОСОБ СБОРКИ СТУПЕНИ СТАТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2666836C2 |
| КОНТЕЙНЕР ДЛЯ СТОМАТОЛОГИЧЕСКОГО МАТЕРИАЛА | 2018 |
|
RU2752586C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И УСТРОЙСТВО СВЯЗИ | 2017 |
|
RU2740151C1 |
| ИНСТРУМЕНТ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА, СОДЕРЖАЩИЙ ВЗАИМОДЕЙСТВУЮЩИЙ С ПОЛЬЗОВАТЕЛЕМ ДИСПЛЕЙ (ВАРИАНТЫ) | 2007 |
|
RU2421115C2 |
| КОНСТРУКЦИЯ ДЛЯ УСТАНОВКИ ПРЕОБРАЗОВАТЕЛЯ МОЩНОСТИ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2019 |
|
RU2711947C1 |
| СПИРАЛЬНАЯ РЕЖУЩАЯ ВСТАВКА СО СТУПЕНЧАТЫМИ РЕЖУЩИМИ КРОМКАМИ | 1996 |
|
RU2126314C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР С ДРЕНАЖНОЙ СИСТЕМОЙ ДЛЯ ОТВЕДЕНИЯ ЖИДКОСТИ | 2011 |
|
RU2522125C2 |
Изобретение относится к технике измерения и контроля осевых вибраций. Система для определения несоосности валов в турбомашинной установке (10), имеющей множество компонентов (12, 14, 16) с последовательно соединенными вращающимися валами (24, 26, 28), содержит датчик (30A, 30B и 30C), прикрепленный к компоненту (12, 14, 16) турбомашинной установки (10) вблизи вращающегося вала (24, 26, 28), где этот датчик (30A, 30B и 30C) собирает данные (50) о вибрации вдоль оси вращающегося вала (24, 26, 28). Также имеется частотный анализатор (52) для формирования данных в частотной области из данных о вибрации и система (54) анализа для анализа частотного компонента (12, 14, 16) данных в частотной области на однократной частоте вращения вращающегося вала (24, 26, 28) для идентификации несоосности между вращающимся валом (24, 26, 28) и соединенным с ним соседним вращающимся валом (24, 26, 28). Технический результат заключается в возможности контролирования несоосности вращающихся валов. 2 н. и 8 з.п. ф-лы, 3 ил.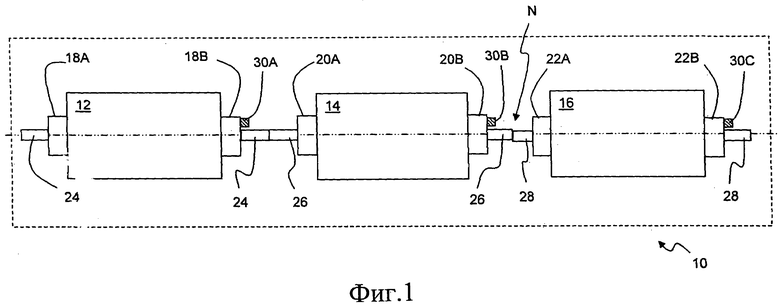
1. Система для определения несоосности валов в установке из компонентов (12, 14, 16) с последовательно соединенными вращающимися валами (24, 26, 28), содержащая:
датчик (30A, 30B и 30C), прикрепленный к компоненту (12, 14, 16) упомянутой установки вблизи вращающегося вала (24, 26, 28), при этом упомянутый датчик (30A, 30B и 30C) собирает данные о вибрации вдоль направления оси (32) вращающегося вала (24, 26, 28);
частотный анализатор (52) для формирования данных в частотной области из данных о вибрации; и
систему (54) анализа для анализа частотного компонента (12, 14, 16) данных в частотной области на однократной частоте вращения вращающегося вала (24, 26, 28) для идентификации несоосности между вращающимся валом (24, 26, 28) и соединенным с ним соседним вращающимся валом (24, 26, 28).
2. Система по п.1, в которой датчик (30A, 30B и 30C) прикреплен к корпусу (18A/18B, 20A/20B, 22A/22B) подшипника вблизи вращающегося вала (24, 26, 28).
3. Система по п.1, в которой пиковая амплитуда около однократной частоты вращения вращающегося вала (24, 26, 28) указывает на несоосность.
4. Система по п.1, в которой упомянутый компонент (12, 14, 16) содержит муфту, которая позволяет отсоединять вращающийся вал (24, 26, 28) от соединенного с ним соседнего вращающегося вала (24, 26, 28).
5. Система по п.1, в которой система (54) анализа оценивает тенденции изменения упомянутых данных в частотной области для предсказания возможной несоосности.
6. Система по п.1, в которой система (54) анализа выводит информацию (56) о соосности непрерывно.
7. Система по п.1, в которой система (54) анализа выводит предупреждение, если обнаружена несоосность.
8. Система по п.1, в которой частотный анализатор (52) использует вычисления, выбранные из группы, состоящей из: преобразования Фурье, быстрого преобразования Фурье, кепстрального анализа и Z-преобразования.
9. Система по п.1, также содержащая множество датчиков (30A, 30B и 30C), для сбора данных (50) об осевой вибрации из множества мест упомянутой установки.
10. Установка из множества компонентов (12, 14, 16) с последовательно соединенными вращающимися валами (24, 26, 28), содержащая
датчик (30A, 30B и 30C), прикрепленный по меньшей мере к одному упомянутому компоненту (12, 14, 16) вблизи вращающегося вала (24, 26, 28), при этом упомянутый датчик (30A, 30B и 30C) собирает данные (50) о вибрации вдоль направления оси вращающегося вала (24, 26, 28);
частотный анализатор (52) для формирования данных в частотной области из данных о вибрации; и
систему (54) анализа для анализа частотного компонента (12, 14, 16) данных в частотной области на однократной частоте вращения вращающегося вала (24, 26, 28) для идентификации несоосности между вращающимся валом (24, 26, 28) и соединенным с ним соседним вращающимся валом (24, 26, 28).
| US 5365787 A, 22.11.1994 | |||
| US 5194920 A, 16.03.1993 | |||
| US 5544073 A, 06.08.1996 | |||
| US 6092029 A, 18.07.2000 | |||
| US 6289735 B1, 18.09.2001 | |||
| US 6768938 B2, 27.07.2004 | |||
| Устройство для измерения несоосности валов | 1989 |
|
SU1793203A1 |

