Область техники, к которой относится изобретение
Изобретение относится к области мощных электронных устройств. В частности, изобретение относится к способу, программному элементу, считываемому компьютером носителю информацию и контроллеру, для управления преобразователем. Кроме того, изобретение относится к преобразователю.
Уровень техники
Для управления многофазным электрическим устройством, может использоваться многоуровневый преобразователь, который содержит фазовый модуль для каждой фазы, генерирующей множество разных выходных напряжений, в зависимости от конструкции фазового модуля. Например, двухуровневый фазовый модуль генерирует два выходных напряжения (+UDC, 0), и трехуровневый фазовый модуль генерирует три выходных напряжения (+UDC, 0, -UDC). Фазовый модуль может содержать множество электрических ключей, обычно мощных полупроводниковых ключей, которые генерируют выходное напряжение соответствующей фазы, в соответствии со структурой переключения или состоянием переключения, которое описывает, какие ключи фазового модуля являются электропроводными (включены) и какие ключи заблокированы (выключены).
Существует ряд возможностей, то есть, способов модуляции, для генерирования таких структур переключения.
Например, структуры переключения могут быть определены с помощью концепции оптимизированных импульсных структур (ОРР). С помощью оптимизированных импульсных структур работа электродвигателя может быть основана на предварительно рассчитанных структурах переключения, которые достигают определенной цели минимизации, такой, как устранение определенных гармоник или минимизация общих гармонических искажений тока двигателя. Однако когда частота вращения электродвигателя или амплитуда напряжения или оба эти параметра выходят за пределы определенного порогового значения, количество импульсов, требуемых для оптимизированной структуры импульса, настолько велико, что это может представлять собой затруднение. Кроме того, при таких низких значениях скорости вращения электродвигателя и/или напряжения, использование оптимизированных импульсных структур не обеспечивает преимущество с точки зрения полученного значения общих гармонических искажений тока двигателя по сравнению с другими способами, такими как широтно-импульсная модуляция (PWM).
Таким образом, в случае низкой скорости электродвигателя и/или низкого напряжения, может использоваться концепция широтно-импульсной модуляции (PWM). Здесь, например, средним значением выходного напряжения в течение цикла модуляции, которое требуется подать в электрическое устройство, можно управлять путем переключения между возможными выходными напряжениями с высокой частотой по сравнению с основной частотой выходного переменного напряжения.
Другая возможность состоит в использовании концепции прямого управления крутящим моментом (DTC), и в этих состояниях электродвигателя, например, получают оценку крутящего момента и магнитного потока, и ими управляют так, чтобы оставаться в пределах их зон гистерезиса, путем переключения в момент, когда соответствующие переменные ошибки достигают своего верхнего или нижнего предела.
При использовании любого способа модуляции для работы преобразователя, в частности, для преобразователя с пятиуровневой топологией, возникает основная проблема: правильный выбор фактических структур переключения преобразователя, которые воспроизводят требуемые выходные напряжения, при балансировании с внутренними напряжениями преобразователя (например, потенциалом нейтральной точки, напряжением плавающего конденсатора).
Раскрытие изобретения
Цель настоящего изобретения состоит в том, чтобы лучше балансировать внутренними состояниями электрического преобразователя, которым управляют с помощью способа широтно-импульсной модуляции.
Эта цель достигается с помощью предмета изобретения независимых пунктов формулы изобретения. Кроме того, примерные варианты осуществления будут понятны из зависимых пунктов формулы изобретения и следующего описания.
Первый аспект изобретения относится к способу управления преобразователем.
В соответствии с вариантом осуществления изобретения, преобразователь выполнен с возможностью генерировать переменный ток, по меньшей мере, для двух фаз, в результате вывода разных уровней напряжения для каждой фазы, в которых разные уровни напряжения зависят от состояний переключения преобразователя. Например, преобразователь можно использовать для подачи в электродвигатель питания, для соединения генератора с сетью электропитания, для взаимного соединения двух сетей электропитания. Преобразователь может быть прямым или опосредованным преобразователем.
Для генерирования уровня напряжений для каждой фазы преобразователь может содержать фазовый модуль для каждой управляемой фазы, который содержит ключи, генерирующие выходные напряжения для фазы. Обычно фазовые модули преобразователя могут иметь эквивалентную конструкцию. Уровни выходного напряжения зависят от состояния переключения ключей (открытый/закрытый для каждого ключа). Учитывая избыточность, которая может, по существу, присутствовать в преобразователях, разные состояния переключения ключей фазового модуля могут генерировать одинаковый уровень напряжения.
В соответствии с вариантом осуществления изобретения, способ содержит следующие этапы:
(а) Генерируют первую последовательность векторов напряжения, причем каждый вектор напряжения содержит уровень напряжения для каждой фазы, путем: генерируют опорную форму колебаний для каждой фазы; определяют уровни напряжения для фазы, для каждого вектора напряжения первой последовательности путем вывода уровней напряжения из соответствующей опорной формы колебаний для фазы.
Вектор напряжения может содержать уровень напряжения для каждой фазы. Когда вектор напряжения прикладывают к преобразователю, ключи каждого модуля фазы требуется переключать таким образом, чтобы уровень напряжения вектора напряжения для соответствующей фазы был выведен соответствующим фазовым модулем. Последовательность векторов напряжения может содержать набор векторов напряжения, которые могут быть выведены преобразователем в последовательные моменты времени, для генерирования модулированного выходного напряжения для каждой фазы.
На этапе (а) определяют первую последовательность переключения с помощью, так называемой, широтно-импульсной модуляции на основе несущей (CB-PWM). В этом случае моменты переключения могут быть выведены в результате пересечения формы колебаний несущей и опорной формы колебаний. Момент переключения может содержать уровень напряжения и время переключения. Кроме того, момент переключения может содержать состояние переключения фазового модуля, в результате которого получают уровень напряжения.
Для каждой фазы опорная форма колебаний может представлять собой форму колебаний, которая в среднем должна быть выведена соответствующим фазовым модулем. Опорная форма колебаний может быть определена на основе частоты, крутящего момента или других переменных для того, чтобы электродвигатель соответствовал определенным требованиям. Форма колебаний несущей обычно представляет собой периодическую форму колебаний с более высокой частотой, чем опорная форма колебаний. Например, форма колебаний несущей может иметь период в диапазоне 200-1000 мкс. Для вывода моментов переключения для каждой фазы форма колебаний несущей пересекается с опорной формой колебаний, и точки пересечения определяют время момента переключения. Уровень напряжения момента переключения, то есть, уровень напряжения, который требуется прикладывать к соответствующему фазовому модулю, также может быть выведен из наклона формы колебаний несущей в точке пересечения и по магнитуде напряжения в точке пересечения.
Из момента переключения в одно и то же время переключения может быть сформирован вектор напряжения во время переключения. Векторы напряжения во временном порядке затем могут формировать первую последовательность переключения.
В соответствии с вариантом осуществления изобретения, способ содержит следующие этапы:
(b) Определяют набор эквивалентных последовательностей векторов напряжения следующим образом: рассчитывают разности уровней напряжения для каждого вектора напряжения последовательности векторов напряжения, причем разности, уровней напряжения представляют собой разности уровней напряжения вектора напряжения; определяют эквивалентный вектор напряжения с равными разностями напряжений; генерируют эквивалентную последовательность путем замены, по меньшей мере, одного вектора напряжения первой последовательности эквивалентным вектором напряжения.
На этапе (b) используют, так называемую, многофазную избыточность для генерирования эквивалентных последовательностей, то есть, последовательностей, которые генерируют те же токи в электродвигателе, когда последовательность прикладывают к электродвигателю. (Когда последовательность прикладывают к электродвигателю, векторы напряжений последовательности прикладывают последовательно к преобразователю. После приложения вектора напряжения контроллер ожидает заданное время (которое может быть определено временем переключения) до подачи следующего вектора напряжения. Следует понимать, что последовательности обычно не применяют электродвигателю, а используют для оценки или имитации поведения преобразователя или электродвигателя, для вывода значений, которые были оптимизированы).
Поскольку не разности напряжений между потенциалами на выводах электродвигателя относительно нейтральной точки преобразователя, но разности напряжений между выводами двигателя генерируют ток в электродвигателе, два вектора напряжений с равными разностями напряжений между фазами будут генерировать одинаковый ток в электродвигателе. Таким образом, разности напряжений всех векторов напряжений последовательности могут быть определены, и эквивалентные векторы напряжений с равными разностями напряжений могут использоваться для генерирования эквивалентных последовательностей. Например, эквивалентные векторы напряжений могут быть сохранены в справочной таблице.
Для получения всех возможных эквивалентных последовательностей все возможные комбинации векторов эквивалентного напряжения могут быть заменены в первой последовательности.
Следует отметить, что также, так называемая, однофазная избыточность может использоваться для генерирования эквивалентных последовательностей. Однофазная избыточность относится к тому факту, что разные состояния переключения модуля многоуровневого преобразователя могут генерировать одинаковый уровень выходного напряжения. В таком случае состояние переключения требуется назначать для каждого уровня напряжения. Таким образом, последовательности содержат состояния переключения модулей фазы.
В соответствии с вариантом осуществления изобретения, способ содержит следующие этапы:
(с) выбирают одну последовательность из набора эквивалентных последовательностей, которая оптимизирует внутреннее состояние преобразователя, когда последовательность применяют к преобразователю.
На этапе (с), для всей эквивалентной последовательности оценивают внутренние состояния преобразователя, когда соответствующая последовательность должна быть применена к преобразователю. Например, могут быть рассчитаны потенциалы нейтральной точки или потенциалы конденсаторов. Затем выбирают последовательность, которая имеет оптимальные внутренние состояния.
В соответствии с вариантом осуществления изобретения, на этапе (с) выбирают последовательность таким образом, что, по меньшей мере, оптимизируется одно из следующих внутренних состояний преобразователя: потенциал нейтральной точки находится в пределах заданных границ, потери переключения и/или частоту переключений минимизируют, напряжение общего режима и/или вариации напряжения общего режима минимизируют, среднее отклонение внутреннего состояния от заданного внутреннего состояния является минимальным.
В соответствии с вариантом осуществления изобретения, на этапе (с) последовательность выбирают путем: оценки внутреннего состояния (или развития внутреннего состояния относительно времени) преобразователя, путем применения последовательности к модели преобразователя; выбирают последовательность с оптимальной оценкой внутреннего состояния.
В соответствии с вариантом осуществления изобретения, способ содержит следующий этап:
(d) применяют первый вектор напряжения выбранной последовательности к преобразователю.
На этапе (d) не всю выбранную последовательность, но только первый вектор напряжения последовательности применяют к преобразователю.
В соответствии с вариантом осуществления изобретения, опорную форму колебаний генерируют на основе, по меньшей мере, одного из опорного профиля и максимальной амплитуды.
Опорный профиль может представлять собой периодическую функцию, например, синусоидальную функцию. Также могут быть добавлены периодические отклонения более высокого порядка. Например, опорный профиль sin(x)+sin(3x) может иметь преимущество максимизации использования постоянного напряжения соединения преобразователя энергии, прикладываемого к электродвигателю. Опорный профиль может содержать набор дискретных значений, которые содержатся в справочной таблице.
Опорное время может использоваться для определения, в каком положении в пределах периода опорного профиля начинается опорная форма колебаний. Это может зависеть от текущего углового положения соответствующей фазы, для которой требуется рассчитать опорную форму колебаний.
Максимальная амплитуда может определять максимальное значение опорной формы колебаний. Максимальная амплитуда может быть основана на индексе модуляции электродвигателя, с которым соединен преобразователь. Индекс модуляции может относиться к максимальной амплитуде напряжения, которое должно быть приложено к электродвигателю и может быть выведен по модели электродвигателя, крутящему моменту и угловой скорости электродвигателя.
Опорная форма колебаний для каждой фазы может быть основана на модели электрического устройства, с которым соединен преобразователь. Несколько номинальных значений существуют для устройства: крутящий момент, поток статора, поток ротора и ток статора. Опорная форма колебаний должна быть выбрана таким образом, чтобы эти номинальные значения удовлетворялись.
В соответствии с вариантом осуществления изобретения, на этапе (а) способа уровень напряжения для фазы выводят из опорной формы колебаний при пересечении опорной формы колебаний, по меньшей мере, с одной несущей формой колебаний, имеющей периодически положительные и отрицательные наклоны. Как пояснялось выше, по пересечениям опорной формы колебаний с несущей формой колебаний могут быть выведены время переключения и уровень напряжения для момента переключения.
В соответствии с вариантом осуществления изобретения, каждый уровень напряжения фазы относится к моменту времени или точке времени, в которой момент времени может представлять собой момент времени, в который форма колебаний несущей пересекает опорную форму колебаний. Каждый выведенный уровень напряжения для фазы может быть сопоставлен с определенным моментом времени. Если форма колебаний несущей пересекает опорную форму колебаний, генерируется новый уровень напряжения для фазы. Новый уровень напряжения соотносится с моментом времени точки пересечения.
Все уровни напряжений для всех фаз могут быть сгенерированы (или могут быть спрогнозированы) для заданного будущего периода времени с помощью способа.
После того, как все уровни напряжения для заданного периода времени были сгенерированы, уровни напряжения, относящиеся к одному моменту времени, собирают в вектор напряжения. Если в определенный момент времени присутствуют только уровни напряжения для определенной фазы, а не для всех фаз, вектор напряжения с поддерживаемым значением напряжения в этот момент времени для недостающей фазы может быть вставлен в вектор напряжения. Таким образом, вектор напряжения может быть соотнесен с моментом времени, то есть, моментом времени его уровней напряжения.
Последовательность векторов напряжения может быть сгенерирована из векторов напряжения, упорядоченных по их моментам времени.
В соответствии с вариантом осуществления изобретения, по меньшей мере, одна форма колебаний несущей охватывает интервал между низким уровнем напряжения и высоким (последовательным) уровнем напряжения преобразователя. Преобразователь (и, в частности, фазовый модуль) может быть выполнен с возможностью генерирования N уровней напряжения. Таким образом, N-1 форм колебаний несущей могут быть сгенерированы. Например, если преобразователь имеет уровни напряжения {-1, 0, 1}, может существовать две формы колебаний несущей, одна из которых охватывает от -1 до 0 и другая охватывает от 0 до 1. Для пятиуровневого преобразователя могут присутствовать четыре формы колебаний несущих.
В соответствии с вариантом осуществления изобретения уровень напряжения устанавливают, как более низкий уровень напряжения, если опорная форма колебаний пересекает положительный наклон формы колебаний несущей, и уровень напряжения устанавливают на более высокий уровень напряжения, если опорная форма колебаний пересекает отрицательный наклон формы колебаний несущей. Каждый положительный наклон может находиться в первой половине периода несущей, и каждый отрицательный наклон может находиться во второй половине периода несущей. Таким образом, когда опорная форма колебаний находится между двумя уровнями напряжений, формируются чередующиеся моменты времени переключения, которые образуют такое же среднее напряжение, как и у опорной формы колебаний.
Например, при положительном наклоне форма колебаний несущей может линейно увеличиваться от нижнего уровня напряжения до высокого уровня напряжения, и при отрицательном наклоне форма колебаний несущей может линейно понижаться от высокого уровня напряжения до более низкого уровня напряжения. Таким образом, форма колебаний несущей может иметь функцию в форме лямбда (λ), минимальное значение функции может представлять собой первый (более низкий) уровень напряжения, и максимальное значение функции может представлять собой второй (более высокий) уровень напряжения. Когда функция несущей имеет только прямые отрезки, расчет пересечений может быть простым.
В соответствии с вариантом осуществления изобретения, дополнительный уровень напряжения для фазы выводят из опорной формы колебаний, когда опорная форма колебаний пересекает уровень напряжения между двумя формами колебаний несущей, в котором дополнительный уровень напряжения для фазы устанавливают на следующий, более высокий уровень напряжения, если опорная форма колебаний увеличивается в момент времени пересечения, и дополнительный уровень напряжения для фазы устанавливают на следующий, более низкий уровень напряжения, если опорная форма колебаний понижается в момент времени пересечения. Как и все уровни напряжения, дополнительный уровень напряжения фазы также может быть сопоставлен с моментом времени, при этом момент времени представляет собой момент времени, в который опорная форма колебаний пересекает уровень напряжения между двумя несущими формами колебаний.
В соответствии с вариантом осуществления изобретения, опорная форма колебаний содержит последовательность значений напряжения, причем каждое значение напряжения соотносится с моментом времени. Эти моменты времени могут соответствовать моментам времени, в которые наклон несущей меняется на противоположный. Опорная форма колебаний может представлять собой дискретную кривую. Каждое значение напряжения может быть сопоставлено с моментом или точкой времени. Последовательные значения напряжения могут быть разделены половиной периода вызываемой несущей.
Во время расчета пересечения между формой колебаний несущей и опорной формой колебаний, опорная форма колебаний может быть интерполирована между значениями напряжения.
Например, опорная форма колебаний между первым напряжением и последовательными вторыми значениями напряжения может быть интерполирована, как первое значение напряжения. В этом случае, опорную форму колебаний можно рассматривать, как ступенчатую функцию. В качестве альтернативы, опорная форма колебаний может быть линейно интерполирована между первым значением напряжения и последовательным вторым значением напряжения.
Дополнительный аспект изобретения относится к программному элементу (компьютерной программе) для управления преобразователем, который, когда его исполняет, по меньшей мере, один процессор, выполнен с возможностью выполнения этапов способа, как описано выше и далее. Например, процессор может представлять собой процессор контроллера.
Дополнительный аспект изобретения относится к считываемому компьютером носителю информации, в котором содержится такой программный элемент.
Считываемый компьютером носитель информации может представлять собой гибкий диск, жесткий диск, устройство накопитель USB (универсальная последовательная шина), RAM (оперативное запоминающее устройство), ROM (постоянное запоминающее устройство), EPROM (стираемое программируемое постоянное запоминающее устройство), или запоминающее устройство типа флэш. Считаемый компьютером носитель информации может также представлять собой сеть передачи данных, например, Интернет, которая позволяет загружать программный код.
Также возможно воплощение способа с использованием FPGA (программируемая пользователем вентильная матрица).
Дополнительный аспект изобретения относится к контроллеру для управления преобразователем, который выполнен с возможностью исполнения способа, как описано выше и далее. Контроллер может содержать процессор и запоминающее устройство с программным элементом, который должен быть выполнен процессором. В качестве альтернативы, контроллер может содержать FPGA.
Дополнительный аспект изобретения относится к преобразователю.
В соответствии с вариантом осуществления изобретения, преобразователь содержит схему преобразователя с ключами, схема преобразователя выполнена с возможностью генерировать выходные напряжения для, по меньшей мере, двух фаз, выходные напряжения, соответствуют разным уровням напряжения, генерируемым состояниями переключения ключей. Схема преобразователя может содержать упомянутые выше модули фазы для генерирования выходных напряжений.
В соответствии с вариантом осуществления изобретения, преобразователь содержит контроллер, для управления ключами, причем контроллер выполнен с возможностью исполнения способа, описанного выше и далее.
Способ, как описано в выше и далее, является обобщенным и может быть применим для любой установки многоуровневого преобразователя, управляемого с помощью технологии широтно-импульсной модуляции на основе несущей, для которого прогнозирование будущих моментов переключения можно применять для прогнозирующей внутренней функции регулирования напряжения.
В общем, представлен способ прогнозирования последовательностей для широтно-импульсных последовательностей переключения для многофазного многоуровневого преобразователя. С помощью первой прогнозируемой последовательности переключения, благодаря многофазной избыточности, определяются эквивалентные последовательности переключения. Из эквивалентных последовательностей переключения выбирают одну последовательность переключения, оптимальную в отношении заданной цели оптимизации. Выбранную последовательность переключения используют для управления преобразователем.
Следует понимать, что особенности способа, описанные выше и далее, могут представлять собой особенности устройств, как описано выше и далее.
Если технически возможно, но не указано явно, также комбинации вариантов осуществления изобретения, описанные выше и далее, могут представлять собой варианты осуществления способа и устройств.
Эти и другие аспекты изобретения будут понятны и будут представлены со ссылкой на описанные ниже варианты осуществления.
Краткое описание чертежей
Предмет изобретения более подробно поясняется в следующем тексте со ссылкой на примерные варианты осуществления, которые представлены на приложенных чертежах.
На фиг.1 схематично показана система электродвигателя с преобразователем в соответствии с вариантом осуществления изобретения.
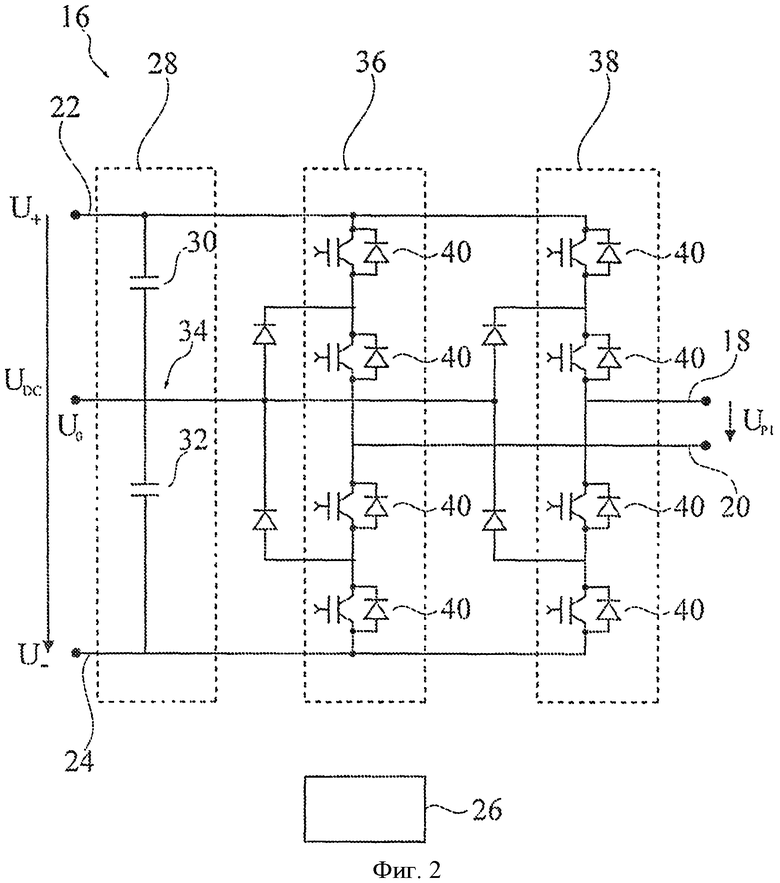
На фиг.2 схематично показан фазовый модуль в соответствии с вариантом осуществления изобретения.
На фиг.3 показана схема с векторами напряжения для преобразователя в соответствии с вариантом осуществления изобретения.
На фиг.4 показана блок-схема последовательности операций для способа управления преобразователем в соответствии с вариантом осуществления изобретения.
На фиг.5 показана блок-схема последовательности операций для способа прогнозирования первой последовательности векторов напряжения в соответствии с вариантом осуществления изобретения.
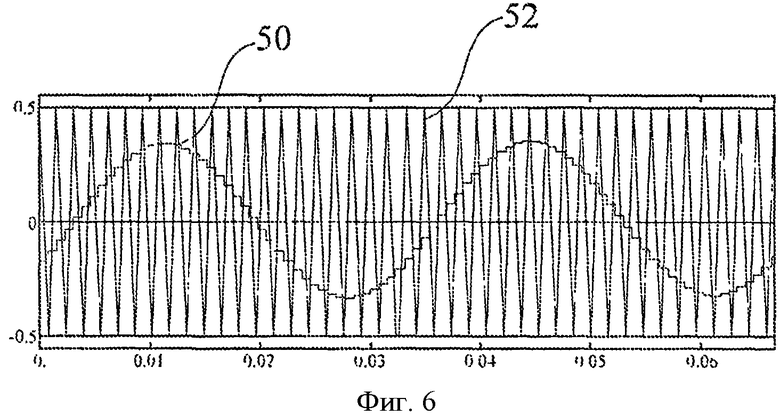
На фиг.6 показана схема с примером опорной формы колебаний в соответствии с вариантом осуществления изобретения.
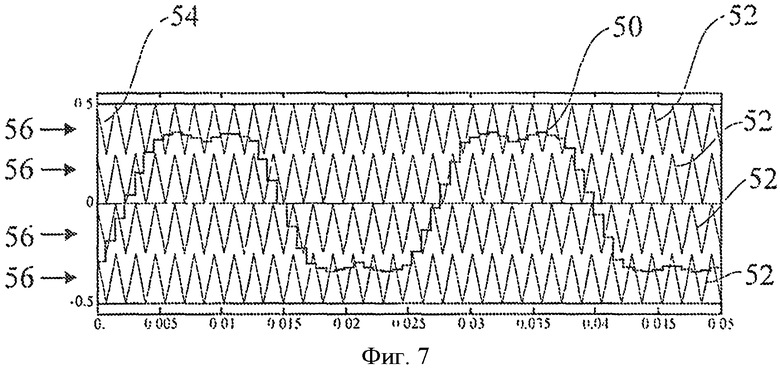
На фиг.7 показана схема с дополнительным примером опорной формы колебаний в соответствии с вариантом осуществления изобретения.
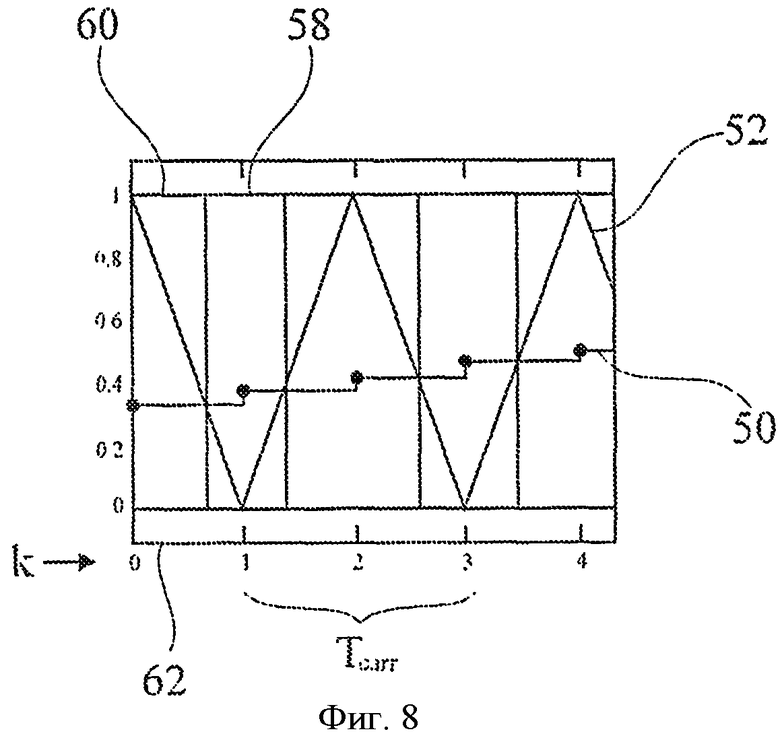
На фиг.8 показана схема с масштабированной и сдвинутой опорной формой колебаний в соответствии с вариантом осуществления изобретения.
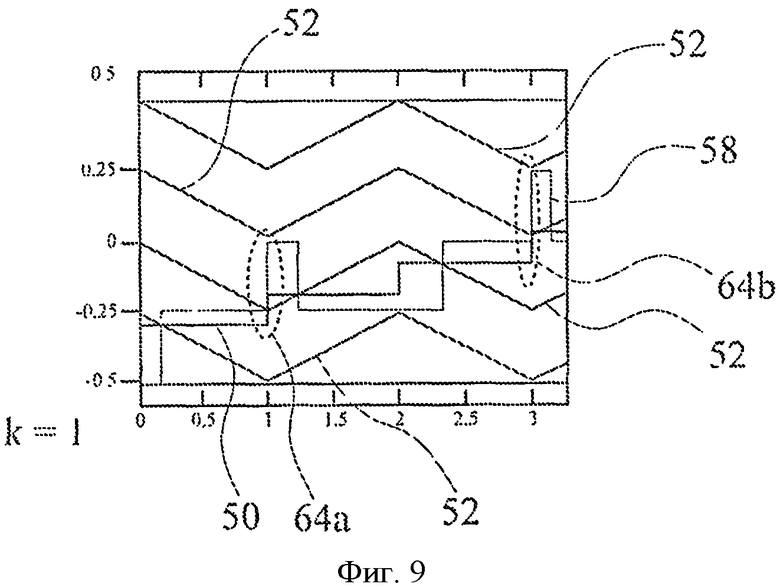
На фиг.9 показана схема с формой колебаний выходного напряжения с дополнительными уровнями напряжения в соответствии с вариантом осуществления изобретения.
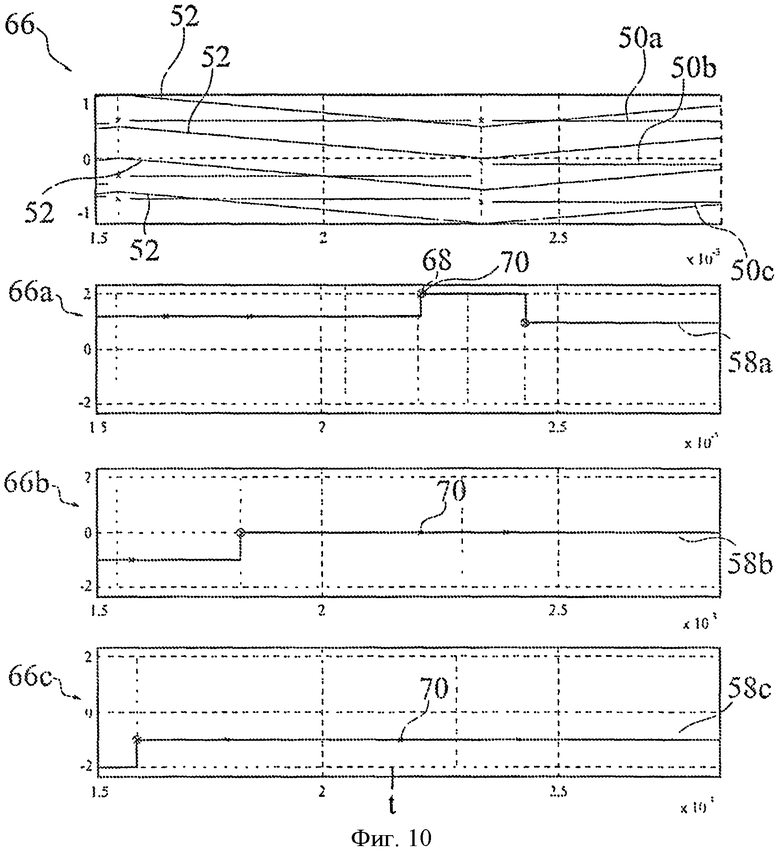
На фиг.10 показаны четыре схемы с результатами способа прогнозирования.
Символы ссылочных позиций, используемые на чертежах, и их значения, представлены в обобщенной форме в списке символов ссылочных позиций. В принципе, идентичные детали обозначены одинаковыми номерами ссылочных позиций на чертежах.
Подробное описание изобретения
На фиг.1 показана система 10 электродвигателя с трехфазным электродвигателем 12 и преобразователем со схемой 14 преобразователя. Схема 14 преобразователя содержит фазовый модуль 16 для каждой фазы P1, P2, Р3, подаваемой в электродвигатель. Каждый из фазовых модулей 16 имеет выход 18, соединенный с соответствующими фазами P1, P2, Р3 двигателя 12, и выход 20, который может использоваться для заземления фазового модуля 16. Обычно вывод 20 оставляют неподключенным так, что он действует, как виртуальное заземление. Между выводами 18 и 20 каждый из фазовых модулей 16 выполнен с возможностью генерировать соответствующее выходное переменное напряжение UP1, UP2, UP3. Каждый из фазовых модулей дополнительно имеет два входа 22, 24, которые соединены с отдельным источником постоянного напряжения UDC. Система 10 электродвигателя содержит дополнительно трансформатор 23, который подает в трехдиодные выпрямители 25 переменный ток. Например, трансформатор 23 может иметь три или шесть фазовых соединений на вторичной стороне. Диодные выпрямители 25 могут быть 6- или 12-импульсными выпрямителями, для генерирования напряжения UDC питания.
Система электродвигателя может представлять собой систему среднего напряжения, то есть, напряжение UDC питания может находиться в диапазоне от 1 кВ до 50 кВ.
Преобразователь содержит дополнительно контроллер 26, который выполнен с возможностью принимать сигналы управления, такие как фазовые токи, из электродвигателя 12, и управлять схемой 14 преобразователя путем передачи или применения команд состояния переключения в фазовые модули, то есть путем включения и выключения ключей фазовых модулей. По принятым сигналам управления контроллер 26 выполняет оценку внутренних состояний электродвигателя, таких как магнитный поток статора, магнитный поток ротора и электромагнитный крутящий момент. На основе этих величин рассчитывают требуемые фазные напряжения UP1, UP2, UP3 в контроллере 26.
На фиг.2 показана возможная конструкция фазовых модулей 16, которые выполнены с возможностью генерировать пять разных выходных напряжений UP1. В трех таких фазовых модулях 16 преобразователь становится пятиуровневым преобразователем, обеспечивающим фазные напряжения UP1, UP2, UP3. Однофазный модуль 16 используется для топологии преобразователя ACS5000 компании ABB.
Фазовый модуль 16 содержит звено 28 постоянного тока с двумя конденсаторами 30, 32, подключенными последовательно между входами 22 и 24. Между этими двумя конденсаторами 30,32, определена нейтральная точка 34 фазового модуля.
Фазовый модуль 16 дополнительно содержит первую схему 36 обратного преобразователя и вторую схему 38 обратного преобразователя. Каждая из схем 36, 38 обратного преобразователя содержат четыре мощных полупроводниковых ключа 40, которые соединены последовательно. Концы двух последовательностей ключей соединены параллельно через звено 28 постоянного тока с входами 22,24.
Между первым и вторым ключом 40 и между третьим и ключом 40 каждой из схем 36, 38 обратного преобразователя, имеется соединение с нейтральной точкой 34 фазового модуля. Выход 18 соединен между вторым и третьим ключом 40 схемы 38 обратного преобразователя. Выход 20 соединен между вторым и третьим ключом 40 схемы 36 обратного преобразователя.
Фазовый модуль 16 выполнен с возможностью генерировать пять разных уровней напряжения между выходами 18, 20. Уровни напряжения генерируют путем соединения выходов 18, 20 с входом 22 (с положительным потенциалом U+), входом 24 (с отрицательным потенциальным U-) или с нейтральной точкой 34 (с потенциалом U0 нейтральной точки).
Соединения генерируются контроллером 26, который открывает и закрывает ключи 40, в соответствии с состоянием переключения фазового модуля.
При высокой скорости электродвигателя контроллер 26 рассчитывает состояния переключения в соответствии со способом оптимизированной импульсной структуры (ОРР), которая основана на предварительном расчета набора импульсных структур (которые могут быть кодированы, как последовательности векторов напряжения), которые представляют напряжения, которые преобразователь должен подавать в электродвигатель в установившемся состоянии, таком, при котором выполняется определенный критерий минимизации. Такие импульсные структуры сохраняют в справочных таблицах. Во время работы контроллер 26 электродвигателя считывает импульсные структуры из этих таблиц, которые должны быть применены в двигателе 12, в зависимости от рабочих условий. Однако единственная информация, которая содержится в ОРР и которая считывается из справочной таблицы, представляет собой угловое положение (то есть, момент времени) и уровни напряжения (например, -VDC, -VDC/2, 0, VDC/2, VDC для каждого фазового модуля 16), которое требуется прикладывать к фазовым выводам P1, P2, Р3 электродвигателя.
При низкой скорости электродвигателя контроллер 26 рассчитывает состояние ключа в соответствии со способом широтно-импульсной модуляции на основе несущей (CB-PWM), как пояснялось выше и поясняется далее. В этой области операций (низкая скорость электродвигателя) CB-PWM может быть предпочтительной из-за высокого значения отношения несущей частоты к фундаментальной частоте. В частности, состояния переключения фазовых модулей 16 определяются контроллером 26 путем выполнения способа управления, как пояснялось выше и далее. Описание в отношении способа ОРР также относится к способу CB-PWM.
При работе с обычным двухуровневым преобразователем, каждое возможное напряжение фазы соответствует уникальной комбинации ключей (состояние переключения), которая их производит, формируя взаимно-однозначное отображение между требуемыми напряжениями и соответствующими положениями ключа. Однако это не относится к случаю многоуровневого преобразователя, где присутствуют, так называемые, одно- и трехфазная избыточности.
В частности, термин однофазная избыточность описывает доступность двух (или больше) разных состояний переключения одного из фазовых модулей, которые формируют одни и те же фазовые напряжения (например UP1), но которые имеют противоположный эффект на потенциал U0 нейтральной точки или на напряжение не плавающего конденсатора: если в одной конфигурации напряжение увеличивается, в другой (для того же тока) оно уменьшается. Как показано на фиг.2, можно получать одно и то же фазовое напряжение (UP1) либо при подключении 18-22 и 20 к 34 или 18-34 и 20 к 24. Первый вариант выбора для положительного тока уменьшает потенциал U0 нейтральной точки, в то время как второй (для того же тока) его увеличивает. Однофазная избыточность обычно используется для балансирования внутренних напряжений преобразователя, поскольку они обеспечивают альтернативы для фазовых напряжений, требуемых схемой модуляции, которая может управлять внутренними напряжениями в требуемом направлении.
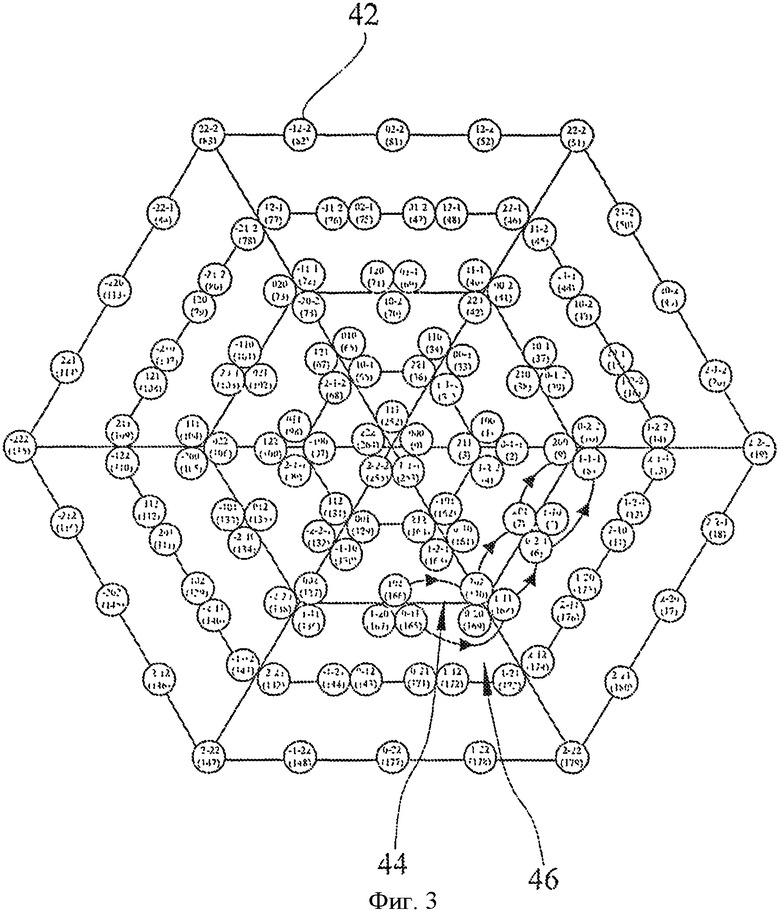
На фиг.3 показана схема с возможными векторами 42 напряжений пятиуровневого преобразователя, такого как 14. Внутри каждого круга для вектора 42 напряжения, представлены три числа, которые обозначают три уровня напряжения вектора напряжения. Например, вектор 42 напряжения содержит уровни напряжения -1, 2, -2, соответствующие выходу трех фазных модулей: UP1=-UDC/2, UP2=UDC и UP3=-UDC. Вектор 42 напряжения может быть описан как (-1 2 -2). Как можно вывести из этой схемы, только вектор 42 напряжения имеет разности -3=-1-(+2) и 4=2-(-2) напряжений.
На фиг.3 дополнительно показана последовательность 44 переключения, содержащая векторы (1 0 2), (2 0 2), (2 0 1) и (2 0 0) напряжений и эквивалентную последовательность переключения, содержащую векторы (0 -1 1), (1 -1 1), (0 -2 -1) и (1 -1 -1) напряжения. Например, первые вектора (1 0 2) и (0 -1 1) напряжений двух последовательностей 44, 46 переключения имеют одинаковые разности 1 и -2 напряжения.
Термин трехфазная избыточность относится к избыточности в разностях напряжения между выходными напряжениями UP1, UP2, UP3, то есть, для случая, когда разные фазовые напряжения могут быть скомбинированы для обеспечения на выводах P1, P2, Р3 электродвигателя одинакового напряжения между фазами. Поскольку все электрические величины электродвигателя зависят от напряжения между фазами, а не от отдельных фазовых напряжений UP1, UP2, UP3, существует еще большее количество (по сравнению с однофазным случаем) избыточных положений ключа. Такие положения ключа генерируют равные напряжения между фазами на выводах Р1, P2, Р3 устройства. Это показано на фиг.3, где можно наблюдать, насколько разные комбинации однофазных напряжений могут генерировать одинаковое напряжение между фазами (разности напряжений) и, таким образом, одинаковый вектор напряжения в плоскости ар.
Таким образом, в многоуровневом преобразователе (в отличие от случая с двухуровневым преобразователем), не существует взаимно-однозначное отображение, ни между фазовыми напряжениями UP1, UP2, UP3, ни между соответствующими состояниями переключения фазового модуля, из-за однофазной избыточности, ни между напряжением между фазами (разностями напряжения) и общими состояниями переключения преобразователя, из-за трехфазной избыточности. Это подразумевает то, что, когда напряжение требуется для ОРР или CB-PWM, может потребоваться алгоритм, чтобы определить (среди множества существующих вариантов) соответствующие положения ключа, которые позволяют достичь напряжения, запрашиваемого ОРР или CB-PWM, при балансировании внутренними параметрами преобразователя и дополнительно уменьшая их потери переключения, снижая их частоту переключения, сводя к минимуму значения напряжения общего режима и т.д.
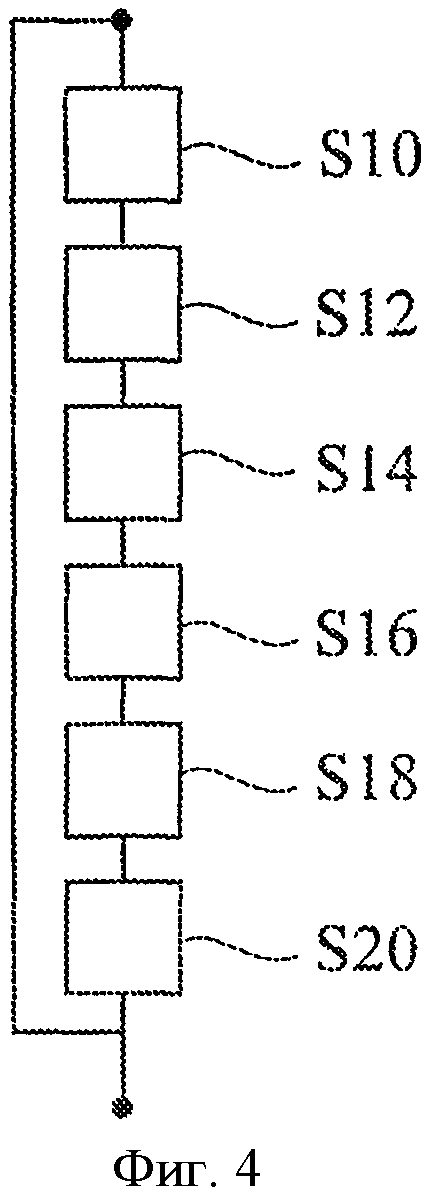
На фиг.4 показана блок-схема последовательности операций для способа управления преобразователем.
На этапе S10 генерируется первая последовательность векторов напряжения. В зависимости от скорости электродвигателя генерируется либо последовательность из структур ОРР, или с использованием алгоритма для генерирования, генерируется CB-PWM на основе последовательности, подробно описанной ниже. В обоих случаях последовательность может быть определена, в зависимости от рабочих условий системы 10 электродвигателя, таких как крутящий момент нагрузки, скорость, ток двигателя и так далее. Например, генерируемая последовательность представляет собой последовательность 44, показанную на фиг.3.
На этапе S12, для каждого вектора напряжения генерируемой (первой) последовательности, определяют эквивалентные векторы напряжения с равными разностями потенциалов. Например, для первого вектора (1 0 2) напряжения из последовательности, эти векторы будут представлять собой векторы напряжения (-1 -2 0) и (0 -1 1). Это может быть выполнено с помощью справочной таблицы, которая, в принципе, содержит информацию, показанную на фиг.3. Затем все возможные комбинации эквивалентных последовательностей генерируют путем замены векторов напряжения первой последовательности на эквивалентные векторы напряжения. Одна из этих последовательностей может представлять собой последовательность 46. Кроме того, для использования одноуровневой избыточности, в каждой эквивалентной последовательности, к каждому уровню напряжения каждого из векторов напряжения добавляют состояние переключения, генерирующее уровень напряжения. Из этих последовательностей выводят эквивалентные последовательности с равными векторами напряжения, но с разными состояниями переключения, путем замены состояния переключения на эквивалентные состояния переключения, то есть, состояния переключения, генерирующие тот же уровень напряжения для фазы.
На этапе S14, для каждой последовательности наборы эквивалентных последовательностей, генерируемых на этапе S12, оценивают эффекты переключения, определенные последовательностью преобразователя. В частности, вариацию потенциала U0 нейтральной точки каждого фазового модуля 16 рассчитывают с помощью интеграла
 ,
,
с помощью которого может быть рассчитано напряжение U на каждом из конденсаторов 30,32. С соответствует емкости конденсаторов 30, 32 звена 28 постоянного тока, и; i(t) ток, протекающий в соответствующий конденсатор 30, 32. Ток i(t) зависит от состояния переключения фазового модуля 16, кодированного в последовательности переключения и тока электродвигателя на соответствующей фазе. Ток электродвигателя может быть рассчитан с помощью модели электродвигателя 12, или его оценка может быть получена с использованием простой синусоидальной функции при условии предположения, что ток электродвигателя соответствующей фазы, по существу, определяется его фундаментальным режимом. Моменты времени Т1 и Т2 определяются последовательностью переключения, которая также содержит моменты времени, когда переключения должны быть применены для преобразователя.
На этапе S16 выбирают последовательности, для которых потенциал U0 нейтральной точки для всех фаз находится в пределах заданных границ.
На этапе S18 для каждой последовательности, выбранной на этапе S16, выполняют оценку потерь переключения. После этого последовательность с наименьшими потерями переключения выбирают, как оптимальную последовательность. В качестве альтернативы или в дополнение, дополнительные критерии оптимизации могут представлять собой частоту переключения или напряжение общего режима и т.д.
На этапе S20 первый вектор напряжения оптимальной последовательности применяют к преобразователю. Перед применением следующего вектора напряжения, снова выполняются этапы S12-S18 для определения новой оптимальной последовательности, которая может отклоняться от предыдущей определенной оптимальной последовательности, например, из-за изменения крутящего момента, нагрузки или тока в электродвигателе.
Способ оптимизации внутренних состояний преобразователя, описанный здесь, не формирует дополнительное переключение, которое увеличивает потери на переключение, и не создает помеху для баланса напряжения второй гармоники, в соответствии с командами широтно-импульсного модулятора. Поэтому, гармонические искажения напряжений и тока не увеличиваются. Способ обеспечивает возможность легкой адаптации для разных случаев многоуровневого преобразователя.
При использовании способа оптимизации для PWM прогнозируемые будущие случаи переключения преобразователя обеспечивают возможность балансирования внутренних напряжений преобразователя (потенциалы нейтральной точки, напряжения плавающих конденсаторов) при удовлетворении установленных целей (уменьшенные потери на переключение, в качестве примера). Для ОРР прогнозированные будущие моменты времени переключения (то есть, первая последовательность векторов напряжения) уже могут присутствовать в контроллере 26.
Когда контроллер 26 использует PWM, в частности, содержит модулятор CB-PWM (запрограммированный в FPGA, в качестве примера), для управления преобразователем, будущие случаи переключения преобразователя могут не присутствовать для способа оптимизации, поскольку модулятор CB-PWM может рассчитывать только следующий необходимый момент времени переключения. Таким образом, одна из трудностей в применении CB-PWM может заключаться в том, что будущие моменты времени переключения не являются заранее определенными, как для ОРР.
Для использования способа с модулятором CB-PWM предстоящие моменты времени переключения могут быть предварительно эффективно рассчитаны в режиме онлайн в соответствии со следующим алгоритмом, способом онлайн для расчета следующих нескольких моментов времени переключения в режиме реального времени.
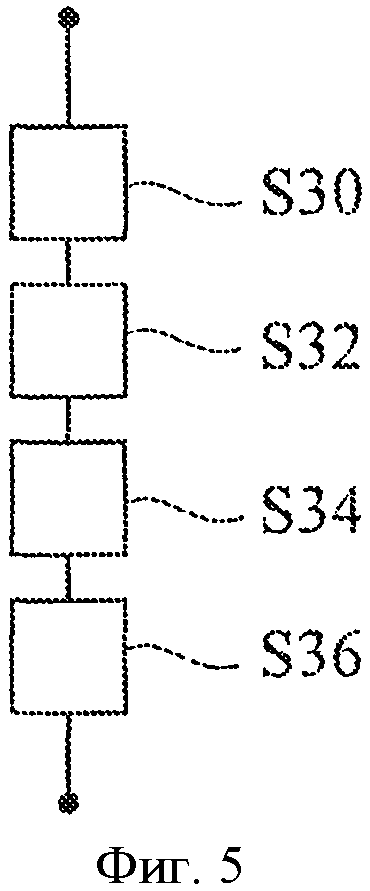
На фиг.5 показана блок-схема последовательности операций для способа или алгоритма для генерирования последовательности на основе CB-PWM векторов напряжения, который может быть выполнен на этапе S12 способа по фиг.. 4, для генерирования первой последовательности векторов напряжения. Способ можно представить, как способ расчета для прогнозирования случаев переключения CB-PWM для предиктивного алгоритма балансирования внутреннего напряжения многоуровневого преобразователя. Способ может быть основан на асимметричной выборке опорных форм колебаний.
На этапе S30 рассчитывают опорную форму 50 колебаний и наклоны 54 несущей для каждой фазы. Этот этап поясняется со ссылкой на фиг.6 и фиг.7.
На фиг.6 показана схема с представлением опорной формы 50 колебаний в масштабе и формы 52 колебаний несущей для 2-уровневого преобразователя. Для упрощения требуемых расчетов опорную форму 50 колебаний и форму 52 колебаний несущей масштабируют так, чтобы значение основания от пика до пика было равно единице. В частности, две формы 50, 52 колебаний содержат только значения от -0,5 до 0,5. Схема представляет развитие двух форм 50, 52 колебаний относительно времени в секундах.
Опорная форма 50 колебаний по фиг.6 может быть сгенерирована в соответствии со следующим уравнением
 ,
,
где Mi представляет собой индекс модуляции (максимальная амплитуда), (и, представляет собой основную частоту электродвигателя 12, и θ представляет собой сдвиг по фазе. В данном случае Voff=0, поскольку опорная форма 50 колебаний представляет собой простую синусоидальную волну.
В принципе, может использоваться любая из хорошо известных опорных форм колебаний. Например, на фиг.7 показана схема с масштабированием опорной формы 50 колебаний и четырьмя формами 52 колебаний несущей для 5-уровнего преобразователя. Опорная форма 50 колебаний по фиг.7 представляет собой наложение опорной формы 50 колебаний по фиг.6 с гармониками высокого порядка.
Вначале фазы формы 52 колебаний несущей и опорной формы колебаний должны быть синхронизированы с текущим состоянием преобразователя. В частности, для опорной формы колебаний должны быть определены параметры Mi, ωs, θ. Для синхронизации алгоритм использует информацию из модулятора CB-PWM, который предоставляет существующую рабочую точку преобразователя. Эта информация может содержать состояние 3-фазного уровня напряжения, наклон следующего цикла несущей и текущее время часов FPGA.
Обычно генерируемая опорная форма 50 колебаний представляет собой последовательность из N значений напряжения, где N представляет собой длину горизонта прогнозирования в способе, то есть VREF (k) при k=0, 1, …, N-1. Моменты времени, относящиеся к каждому значению напряжения (в случае выборки) опорной формы 50 колебаний находятся на пике и во впадине формы колебаний 50 несущей, то есть, соответствуют двум моментами времени несущей частоты.
Ввиду специального профиля форм 50 колебаний несущей, только первый наклон 54 несущей (положительный или отрицательный) форм 50 колебаний несущей должен быть определен и установлен в соответствии со следующим сигналом несущий из модулятора CB-PWM. Следующие наклоны несущей представляют собой чередующиеся положительные и отрицательные наклоны или наоборот. Следует отметить, что в алгоритме не рассчитываются формы 50 колебаний несущей, которые показаны только на фиг.6 и 7 для иллюстрации способа.
В принципе, значения напряжения опорных форм 50 колебаний для каждой из этих трех фаз предварительно рассчитывают вместе с последовательностью наклонов сигнала несущей для заданного горизонта N прогнозирования, например N=4. Горизонт прогнозирования из N значений напряжения каждой из трехфазных форм PWM колебаний начинается с первого значения напряжения, синхронизированного с текущим состоянием преобразователя. Затем следующие значения напряжения рассчитывают, предполагая рабочую точку в установившемся состоянии, то есть, постоянный индекс Mi модуляции и опорную частоту ωs, например, в соответствии с представленной выше формулой для VREF.
На этапе S32 (см. фиг.5), значения опорной формы 50 колебаний масштабируют и сдвигают от уровней 56 несущей в диапазон [0, 1], как показано на фиг.8. Уровень 56 несущей определен двумя последовательными уровнями напряжения преобразователя. Если преобразователь имеет nlevels уровней напряжения, существует nlevels-1 уровень несущей. Как обозначено на фиг.7, пятиуровневый преобразователь 16 имеет четыре уровня 56 несущей, и каждый уровень 56 несущей охвачен одной формой 52 колебаний несущей.
Пример масштабирования и сдвига формы колебаний начинается с формы 52 колебаний несущей и формы 50 опорных колебаний для пятиуровневого преобразователя, показанного на фиг.7. Опорная форма 50 колебаний масштабируется с (nlevels-1) таким образом, что каждый уровень 56 несущей имеет магнитуду от пика к пику, равную 1. Каждый уровень 56 несущей затем сдвигают до диапазона [0, 1], например, часть опорного сигнала в каждом уровне несущей частоты сдвигается соответственно на: верх (-1), верхний средний (0), нижний средний (+1) и низ (+2). Для каждого уровня 56 несущей отбрасывают значения напряжения опорной формы 50 колебаний, которые в конце не имеют значения в диапазоне [0, 1]. После масштабирования и сдвига для каждого уровня 56 несущей существует масштабированная опорная форма колебаний, как обозначено на фиг.8. На фиг.8 также ось времени была масштабирована таким образом, что момент времени значений напряжения опорной формы 50 колебаний соответствует индексу k времени (натуральное число).
Для пятиуровневого преобразователя такой расчет может быть выполнен таким способом, что значения опорной формы 50 колебаний на фиг.7 разделяют в отношении уровней 56 несущей для каждого k:
Верхний уровень несущей: 0,5≥Vref(k)>0,25
Верхний средний уровень несущей: 0,25≥Vref(k)>0
Нижний средний уровень несущей: 0≥Vref(k)>-0,25
Нижний уровень несущей: -0,25≥Vref(k)>-0,5
После разделения опорных значений для каждого уровня 56 несущей их масштабируют и сдвигают:
Vref_newt2(k)=(nlevels-1)Vref(k)-1 для 0,5≥Vref(k)>0,25
Vref_newt1(k)=(nlevels-1)Vref(k)-0 для 0,25≥Vref(k)>0
Vref_newb1(k)=(nlewels-1)Vref(k)+1 для 0≥Vref(k)>-0,25
Vref_newb2(k)=(nlevels-1)Vref(k)+2 для -0,25≥Vref(k)>-0,5
где nlevels=5 в данном конкретном примере.
На этапе S32 (см. фиг.5) рассчитывают моменты переключения (уровни напряжения и точки времени, то есть, моменты времени) для каждого уровня 56 несущей (и для каждой фазы). Для масштабируемой опорной формы 50 колебаний по фиг.8 возможны только два уровня 60, 62 напряжения, связывающих или ограничивающих уровень 56 несущей. Благодаря масштабированию два уровня напряжения равны 0 и 1 на фиг.8.
Используя способ CB-PWM форма 58 колебаний выходного напряжения устанавливается, как нижний уровень 62 напряжения, если опорная форма 50 колебаний пересекает положительный наклон формы 52 колебаний несущей, и уровень напряжения устанавливают, как высокий уровень 60 напряжения, если опорная форма 50 колебаний пересекает отрицательный наклон формы 52 колебаний несущей.
Как функция опорной формы 50 колебаний, форма 58 колебаний выходного напряжения может представлять собой вектор VOUT(k) при k=0, …, N-1
VOUT(k)=0 (для положительного наклона несущей)
VOUT(k)=1 (для отрицательного наклона несущей)
Для получения правильных выходных уровней, значения VOUT (k) должны быть масштабированы и сдвинуты обратно к масштабу по фиг.7.
При использовании масштаба масштабированной опорной формы 50 колебаний, местоположение (момент времени) момента переключения в пределах половины цикла несущей прямо пропорционально масштабированному значению напряжения, в зависимости от периода формы колебаний несущей:
 (для положительного наклона несущей)
(для положительного наклона несущей)
 (для положительного наклона несущей)
(для положительного наклона несущей)
где Tcarr представляет собой период несущей.
В ходе предыдущих расчетов предполагалось, что значение опорной формы 50 колебаний поддерживается постоянным между двумя моментами k времени. В качестве альтернативы, в соответствии со вторым вариантом осуществления линейной интерполяции между значениями напряжения опорной формы 50 колебаний возможно рассчитать точку пересечения опорной формы 50 колебаний и формы 52 колебаний несущей. В этом случае S32 модифицируется для расчета пересечения двух линий.
На этапе S34 (см. фиг.5) дополнительные момента переключения рассчитывают в соответствии с необходимостью.
На фиг.9 показана форма 58 колебаний выходного напряжения с дополнительными моментами 64а, 64b переключения, вызванными переходом опорной формы 50 колебаний с одного уровня 56 несущей до следующего, из-за выборки.
Дополнительные моменты 64а, 64b переключения или дополнительные уровни 64а, 64b напряжения соответствуют точкам, где опорная форма 50 колебаний пересекает уровень напряжения между двумя формами 52 колебаний несущей. Дополнительный уровень 64а, 64b напряжения установлен на следующий более высокий уровень напряжения, если опорная форма 50 колебаний увеличивается в точке пересечения и дополнительный уровень напряжения для фазы устанавливают на следующий, более низкий уровень напряжения, если опорная форма колебаний уменьшается в точке пересечения.
Например, первый дополнительный момент 64а переключения при k=1 переходит на уровень напряжения 0, поскольку опорная форма колебаний при k=1 пересекает уровень напряжения -0,25. Второй дополнительный момент 64b переключения переходит на уровень напряжения 0,25, поскольку опорная форма 50 колебаний пересекает уровень напряжения, равный 0.
Для определения мест положения (моментов времени) пересечения уровней напряжения, алгоритм должен находить соседние пары значений напряжения опорной формы колебаний, одно из которых является меньшим и другое из которых превышает один из уровней напряжения.
На этапе S36 (см. фиг.5) генерируют последовательность векторов напряжений. Это поясняется со ссылкой на фиг.10.
На фиг.10 показаны четыре схемы 66, 66а, 66b, 66с с результатами способа прогнозирования с 4 горизонтами перехода. На всех схемах 66, 66а, 66b, 66с на оси Х представлено время в секундах. На схеме 66 показаны четыре формы 52 колебаний несущей, опорная форма 50а колебаний для первой фазы, опорная форма 50b колебаний для второй фазы и опорная форма 50с колебаний для третьей фазы. На схеме 66а показана форма 58а колебаний выходного напряжения, генерируемая из опорной формы 50а колебаний, на схеме 66b показана форма 58b колебаний выходного напряжения, генерируемая из опорной формы 50b колебаний, и на схеме 66с показана форма 58с колебаний выходного напряжения, генерируемого опорной формой 50с колебаний.
В каждой из схем 66а, 66b, 66с моменты 70 переключения, генерируемые для всех трех фаз на этапах S32 и S34, обозначены малыми х. Фаза, на которой происходит переход переключения, обозначена кружком 68 вокруг х.
Для каждого перехода 68 переключения в определенный момент t времени для одной из фаз, уровень напряжения поддерживают или сохраняют в других фазах.
После момента переключения в каждый момент t времени формируют вектор напряжения, содержащий время переключения моментов переключения и три уровня напряжения для фаз. Упорядоченный по времени набор векторов напряжения затем формирует последовательность векторов напряжения, прогнозируемых с помощью алгоритма.
Векторы напряжения последовательности векторов напряжения могут быть сохранены в массиве VVectors:
Генерируемая последовательность векторов напряжения, то есть, прогнозируемых уровней напряжения, вместе с моментами времени переключения может затем быть предусмотрена в способе по фиг.4 для определения оптимальных или оптимизированных последовательностей состояний фазы.
Следует отметить, что возможен другой порядок для этапов расчета, отличающийся от порядка, показанного на фиг.5. Например, моменты времени перехода опорной формы колебаний с одного уровня несущей на другой (и, таким образом, моменты времени дополнительных моментов переключения) могут быть определены перед тем, как будут рассчитаны моменты времени переключения для одного уровня несущей.
Далее, например, моменты времени переключения на этапе S32 могут быть рассчитаны отдельно для положительных и отрицательных наклонов формы колебаний несущей. Например, на фиг.9 первый переход опорной формы 50 колебаний возникает на отрицательном наклоне несущей, в то время как второй находится на положительном наклоне. Таким образом, два вектора выбора формируют для правильного комбинирования переходов: положительный наклон = [2 4 …]; отрицательный наклон = [1 3 …]. Эти два массива могут быть скомбинированы в одном упорядоченном по времени массиве уровней напряжения.
В упорядоченном по времени массиве для каждой фазы массив VVectors, содержащий уровень вектора напряжения для каждой фазы, соответствующей каждому моменту переключения, может быть сформирован в соответствии с наклоном следующей несущей и масштабирован до ранее определенного разделения по опорной форме колебаний.
На конечном этапе значения дополнительного уровня напряжения из-за переходов уровня могут быть вставлены в массив VVectors в соответствующий упорядоченный момент времени.
В то время как изобретение было представлено и подробно описано на чертежах и в представленном выше описании, такую иллюстрацию и описание следует рассматривать, как иллюстративные или примерные, а не как ограничительные; изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут быть понятны и выполнены специалистами в данной области техники и специалистами, выполняющими на практике заявленное изобретение, на основе изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и неопределенный артикль "а" или "an" не исключает множество. Одиночный процессор или контроллер, или другой модуль, могут выполнять функции нескольких элементов, представленных в формуле изобретения. Сам по себе факт, что определенные меры изложены во множестве разных зависимых пунктов формулы изобретения, не обозначает, что комбинация других мер не может использоваться с преимуществом. Любые номера ссылочных позиций в формуле изобретения не следует рассматривать, как ограничение объема.
список ссылочных позиций
Изобретение относится к области электротехники и может быть использовано для управления преобразователем. Технический результат - улучшение балансировки внутреннего состояния электрического преобразователя, управляемого способом широтно-импульсной модуляции. В способе прогнозирования последовательности переключения с широтно-импульсной модуляцией для многофазного многоуровневого преобразователя в первой прогнозируемой последовательности переключения из-за многофазной избыточности определяют эквивалентные последовательности переключения. Из эквивалентных последовательностей переключения выбирают одну последовательность переключения, оптимальную в отношении заданной цели оптимизации. Выбранная последовательность переключения используется для переключения преобразователя. 3 н. и 11 з.п. ф-лы, 10 ил.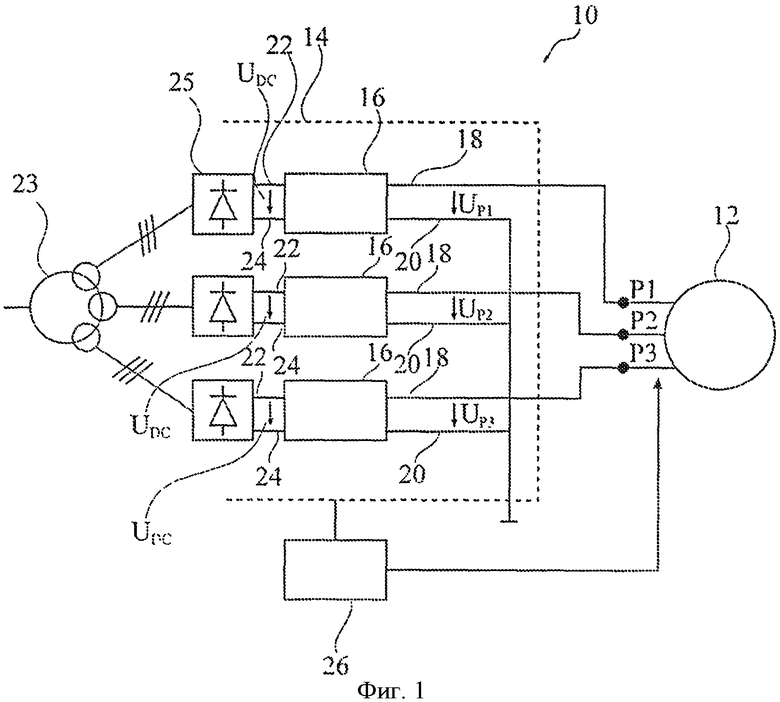
1. Способ управления преобразователем, выполненным с возможностью генерировать переменный ток по меньшей мере для двух фаз путем вывода разных уровней напряжения для каждой фазы, причем разные уровни напряжения зависят от состояний переключения преобразователя, характеризующийся тем, что:
(a) генерируют первую последовательность векторов (44) напряжения, причем каждый вектор напряжения имеет уровень напряжения для каждой фазы, при этом:
формируют опорную форму (50) колебаний для каждой фазы; и
определяют уровни напряжения для фазы для каждого вектора напряжения первой последовательности путем получения уровней напряжения исходя из соответствующей опорной формы (50) колебаний для фазы;
(b) определяют набор эквивалентных последовательностей (46) векторов напряжения, при этом:
рассчитывают разности уровней напряжения для каждого вектора напряжения последовательности векторов (44) напряжения, причем разности уровней напряжения представляют собой разности уровней напряжения вектора напряжения;
определяют эквивалентный вектор напряжения с равными разностями напряжений;
формируют эквивалентную последовательность (46) путем замены по меньшей мере одного вектора напряжения первой последовательности (44) на эквивалентный вектор напряжения;
(c) выбирают одну последовательность из указанного набора эквивалентных последовательностей, которая оптимизирует внутреннее состояние преобразователя, при применении последовательности к преобразователю;
(d) применяют первый вектор напряжения выбранной последовательности к преобразователю.
2. Способ по п.1, в котором опорную форму (50) колебаний формируют на основе по меньшей мере одного из следующих параметров: опорного профиля, опорного времени и максимальной амплитуды.
3. Способ по п.1, в котором на этапе (а) уровень напряжения для фазы получают из опорной формы (50) колебаний в результате пересечения опорной формы (50) колебаний по меньшей мере с одной формой (52) колебаний несущей, имеющей периодические положительные и отрицательные наклоны,
при этом по меньшей мере одна форма (52) колебаний несущей охватывает интервал между нижним уровнем напряжения и верхним уровнем напряжения преобразователя,
причем уровень напряжения устанавливают на указанный нижний уровень напряжения, если опорная форма (50) колебаний пересекает положительный наклон формы (52) колебаний несущей, и уровень напряжения устанавливают на указанный верхний уровень напряжения, если опорная форма (50) колебаний пересекает отрицательный наклон формы (52) колебаний несущей.
4. Способ по п.3, в котором каждый уровень напряжения фазы относится к моменту времени, причем момент времени представляет собой момент времени, в который форма (52) колебаний несущей пересекает опорную форму (50) колебаний.
5. Способ по п.3, в котором положительный наклон формы (52) колебаний несущей линейно увеличивается от низкого уровня напряжения к высокому уровню напряжения, а отрицательный наклон формы (52) колебаний несущей линейно уменьшается от высокого уровня напряжения к низкому уровню напряжения.
6. Способ по п.3, в котором получают дополнительный уровень (64а) напряжения для фазы из опорной формы (50) колебаний, когда опорная форма (50) колебаний пересекает уровень напряжения между двумя формами (52) колебаний несущей, при этом
дополнительный уровень (64а) напряжения для фазы устанавливают на следующий высокий уровень напряжения, если опорная форма (50) колебаний увеличивается в точке пересечения, и дополнительный уровень напряжения для фазы устанавливают на следующий низкий уровень напряжения, если опорная форма (50) колебаний уменьшается в точке пересечения.
7. Способ по п.6, в котором дополнительный уровень (64а) напряжения фазы связывают с моментом времени, причем указанный момент времени представляет собой момент времени, в который опорная форма (50) колебаний пересекает уровень напряжения между двумя формами (52) колебаний несущей.
8. Способ по п.3, в котором опорная форма (50) колебаний содержит последовательность значений напряжения, причем каждое из значений напряжения относится к моменту времени, при этом
при расчете пересечения между формой (52) колебаний несущей и опорной формой (50) колебаний опорную форму (50) колебаний интерполируют между указанными значениями напряжения.
9. Способ по п.8, в котором опорную форму (50) колебаний между значениями первого напряжения и последующего второго напряжения интерполируют как первое значение напряжения; или опорную форму колебаний линейно интерполируют между первым значением напряжения и последующим вторым значением напряжения.
10. Способ по любому из пп.1-9, в котором на этапе (с) при выборе последовательности:
оценивают внутреннее состояние преобразователя путем применения указанной последовательности к модели преобразователя; при этом
выбирают указанную последовательность с оптимальной оценкой внутреннего состояния.
11. Способ по любому из пп.1-9, в котором на этапе (с) выбирают последовательность таким образом, что по меньшей мере одно из следующих внутренних состояний преобразователя оптимизировано:
потенциал (U0) нейтральной точки находится в пределах заданных границ,
минимизированы потери на переключение и/или частоту переключения,
минимизировано напряжение общего режима и/или вариации напряжения общего режима,
среднее отклонение внутреннего состояния от заданного внутреннего состояния является минимальным.
12. Способ по п.10, в котором на этапе (с) выбирают последовательность таким образом, что по меньшей мере одно из следующих внутренних состояний преобразователя оптимизировано:
потенциал (U0) нейтральной точки находится в пределах заданных границ,
минимизированы потери на переключение и/или частоту переключения,
минимизировано напряжение общего режима и/или вариации напряжения общего режима,
среднее отклонение внутреннего состояния от заданного внутреннего состояния является минимальным.
13. Контроллер (26) для управления преобразователем, характеризующийся тем, что выполнен с возможностью выполнения способа по одному из пп.1-12.
14. Преобразователь, содержащий:
схему (14) преобразователя с ключами (40), причем схема (14) преобразователя выполнена с возможностью генерировать выходные напряжения по меньшей мере для двух фаз, при этом выходные напряжения, соответствующие разным уровням напряжения, генерируются посредством состояния переключения ключей (40); и
контроллер (26) для управления ключами (40), причем контроллер (26) выполнен с возможностью выполнения способа по одному из пп.1-12.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С МНОГОУРОВНЕВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289191C1 |
| СТАТИЧЕСКИЙ МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПИТАНИЯ АСИНХРОННЫХ И СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2005 |
|
RU2303851C1 |
| Устройство для снятия контейнеров с повозок | 1946 |
|
SU69353A1 |
| JP 2004513597 A, 30.04.2004 | |||
| US 5532575 A, 02.07.1996 | |||
| US 20090021081 A1, 22.01.2009 | |||
| US 2006067092 A1, 30.03.2006 | |||
| МОНЕТНЫЙ МАТЕРИАЛ | 1997 |
|
RU2110939C1 |
| EP 0913918 A3, 02.05.2001 | |||
| WO 2009012008 A2, 22.01.2009 | |||

