Предлагаемое изобретение относится к системам передачи цифровой информации по космическим радиолиниям, конкретнее, к высокоскоростным радиолиниям (ВРЛ) передачи данных зондирования (ДЗ) от бортовой аппаратуры ВРЛ с космических аппаратов дистанционного зондирования Земли (КА ДЗЗ) на приемную аппаратуру ВРЛ наземных станций (НС) системы ДЗЗ.
Последние годы в системах ДЗЗ из космоса в связи со значительным увеличением площадей наблюдаемой территории и повышением разрешающей способности аппаратуры зондирования в десятки и сотни раз возросли объемы передаваемых ДЗ по ВРЛ. Особенность функционирования таких систем в том, что зондирование происходит по всей поверхности Земли, а передача полученных ДЗ (кроме специальных режимов с использованием спутников-ретрансляторов на геостационарной орбите) только на ограниченное число наземных станций в зоне их радиовидимости. Время радиовидимости для большинства орбит КА ДЗЗ составляет 2÷12 мин.
Эффективность функционирования ВРЛ в составе систем ДЗЗ определяется объемом передаваемых ДЗ, а оперативность, кроме того, содержанием ДЗ и их актуальностью, т.е. организацией порядка их передачи. Поэтому основное требование к ВРЛ: передать за время сеанса связи максимальное количество ДЗ, при возможности, в порядке приоритетов. Объем ДЗ, переданных за время сеанса связи, будет определяться скоростью передачи, обеспечивающей требуемую достоверность. Скорость передачи зависит от высоты орбиты КА ДЗЗ (расстояния между КА ДЗЗ и наземной станцией), энергетического бюджета ВРЛ, сигнально кодовой структуры потока ДЗ и условий передачи (атмосферными потерями). Основной параметр - энергетический бюджет, который определяется величиной эквивалентной изотропно-излучаемой мощности (ЭИИМ) бортовой аппаратурой ВРЛ и добротностью наземных приемных трактов ВРЛ, в основном диаметром антенн наземных станций. Величина ЭИИМ обеспечивается мощностью бортового передатчика (Рб), коэффициентом усиления бортовой антенны (Gб) и определяется выражением
ЭИИМ=Рб×Gб.
Чем больше ЭИИМ, тем выше скорость.
Формальным ограничением ЭИИМ по минимуму является предусмотренная регламентом связи величина плотности электромагнитного потока (Пдоп), излучаемого бортовой аппаратурой ВРЛ у поверхности Земли при минимальной дальности КА ДЗЗ-НС. Пдоп также зависит от угла места луча антенны НС, направленной на КА. Этот минимум ЭИИМ определяет и допустимую энергию на бит информации при заданной достоверности, т.е. максимально возможную скорость передачи информации по ВРЛ. Расстояние (Д) от КА ДЗЗ до НС в течение сеанса связи может изменяться в зависимости от высоты орбиты от 3-х до 12 раз, уровень принимаемого сигнала (Pс) у поверхности Земли в Д2 раз (потери на распространение пропорциональны квадрату расстояния), поэтому для его поддержания необходимо изменение ЭИИМ во время сеанса радиосвязи. Для обеспечения максимальной скорости при выполнении норм регламента радиосвязи необходимо поддерживать соотношение Pс≤Пдоп, целесообразно, по возможности, ЭИИМ/Д2 ≈ const, что упрощает требование к динамическому диапазону работы наземного приемника и ложным захватам сигнала боковыми лепестками антенны.
Такое соотношение можно обеспечить, например, созданием бортовой антенны, коэффициент усиления которой в направлении излучения на НС будет обеспечивать выполнение этого требования.
Антенны с такой диаграммой направленности реализованы на ряде зарубежных и отечественных КА («Метеор», «Монитор», «Канопус», «Белка» и т.д.) и успешно эксплуатируются. Недостатком подобных ВРЛ, в которых мощность передатчика, как правило, не превышает 10 Вт, является ограничение величины бортового ЭИИМ до 14÷16 дБВт, т.к. практически достижимые коэффициенты усиления бортовых антенн с подобной диаграммой направленности лежат в пределах от - 10 дБи до +6 дБи. Это существенно ограничивает скорость передачи. Для увеличения энергетического бюджета таких КА ДЗЗ требуется использование в ВРЛ дорогостоящих наземных антенн с диаметром рефлектора 7÷12 м. Вместе с тем, для ряда наземных станций (в том числе мобильных) необходимо обеспечить прием на антенны с диаметром рефлектора от 2,5 м. Возможным вариантом повышения ЭИИМ в этом случае является использование на борту КА направленных антенн с приводом по углам места и азимута, в которых коэффициент усиления может достигать 20÷50 дБи, что позволяет увеличить скорость до сотен Мбит/сек и более.
Наиболее близкой по технической сущности к предлагаемой ВРЛ с бортовой направленной антенной является «Интегрированная информационно управляющая радиосистема для малых космических аппаратов радиолокационного мониторинга Земли» Горячкин А.А. и др. («Информационно-измерительные и управляющие системы» №6 2007 г.).
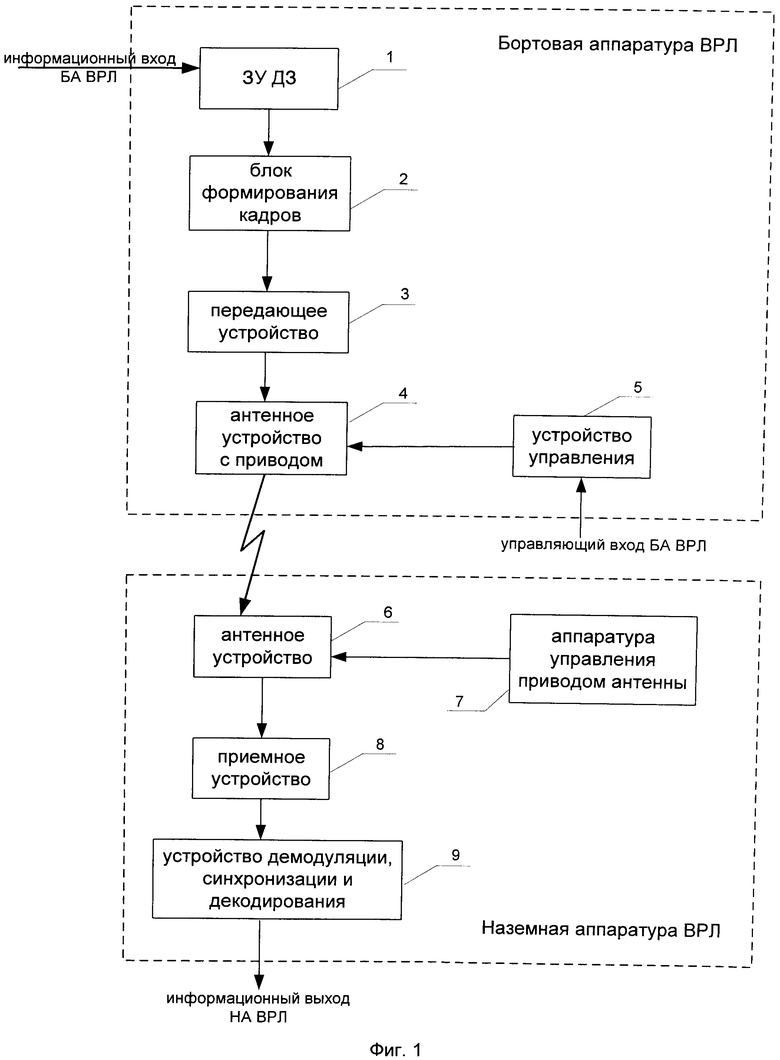
Функционирование системы прототипа будет понятно из структурной схемы (фиг. 1) и нижеследующего описания. На фиг. 1 цифрами обозначены в составе бортовой и наземной аппаратуры ВРЛ:
1 - запоминающее устройство данных зондирования (ЗУ ДЗ);
2 - блок формирования кадров (БФК);
3 - передающее устройство;
4 - антенное устройство с приводом;
5 - устройство управления ВРЛ в составе бортовой аппаратуры;
6 - антенное устройство;
7 - аппаратура управления приводом антенны;
8 - приемное устройство;
9 - устройство демодуляции, синхронизации и декодирования.
В рассмотренной бортовой аппаратуре ВРЛ вход ЗУ ДЗ (1) подсоединен к выходу комплекса ДЗЗ, а выход - ко входу блока формирования кадров (2), выход которого подсоединен ко входу передающего устройства (3), выход которого подсоединен ко входу антенного устройства (4) с приводом. Управляющий вход антенного устройства (4) с приводом соединен с выходом «наведения антенны» устройства управления (5), вход которого подсоединен к управляющему входу БА ВРЛ от систем КА. С выхода антенного устройства (4) с приводом сигнал по радиотракту поступает в наземную станцию на первый вход антенного устройства (6), второй вход которого подсоединен к выходу аппаратуры управления (7) приводом антенны, а выход антенного устройства (6) подсоединен ко входу приемного устройства (8). Выход приемного устройства (8) подсоединен ко входу устройства (9) демодуляции, синхронизации и декодирования, с информационного выхода которого информация поступает в комплекс на программно-технические средства обработки ДЗ.
Система функционирует следующим образом.
В процессе зондирования целевая информация в тактовой сетке комплекса ДЗЗ КА поступает в ЗУ ДЗ (1). В процессе поступления ДЗ последовательно заполняются свободные зоны ЗУ ДЗ и хранятся до момента их считывания в одном из сеансов радиосвязи с наземной станцией. При включении бортовой аппаратуры в сеансе связи ВРЛ через устройство управления (5) по сигналам от КА ДЗЗ информация из ЗУ ДЗ уже в частотной сетке БА ВРЛ последовательно считывается и поступает в БФК (2), где преобразуется в последовательный информационный поток, снабженный соответствующей синхронизирующей информацией. Далее этот информационный поток поступает на вход передающего устройства (3), из которого промодулированные информационным потоком и усиленные в передатчике до регламентированного уровня допустимой мощности сигналы поступают на вход антенного устройства (4) с приводом и излучаются в эфир (радиотракт КА ДЗЗ → наземная станция).
Привод антенного устройства перед сеансом связи по данным от навигационной системы баллистического положения КА через аппаратуру управления (7) приводом антенны наводит антенное устройство (6) таким образом, чтобы диаграмма направленности антенны была ориентирована на выбранную наземную станцию с учетом ее географических координат, а далее отслеживает направление КА ДЗЗ → НС на все время сеанса связи по временной программе, основанной на периодически поступающих данных навигационной системы КА.
Сигнал от бортового антенного устройства (4) ВРЛ поступает на вход антенного устройства (6) наземной станции. Аппаратура управления (7) приводом антенны по прогнозируемым баллистическим данным КА, полученным из центра управления полетом, наводит наземную антенну на КА, далее, приняв сигнал от КА, передает его в приемное устройство (8). Приемное устройство (8) вырабатывает сигнал «Захват», по которому антенное устройство (6) переходит в режим автосопровождения на весь сеанс связи. Сигналы информационного потока с выхода приемного устройства (8) поступают в устройство (9) демодуляции, синхронизации и декодирования, где после соответствующих преобразований восстанавливается первоначальный поток данных зондирования, который затем передается по информационному выходу во внешний комплекс обработки ДЗ. Устройство (9) демодуляции, синхронизации и декодирования является универсальным, т.к. рассчитано на прием информации от различных типов КА ДЗЗ, и функционирует с различными символьными скоростями, видами модуляции, кодирования и синхронизации, используемыми в таких системах.
К недостаткам рассмотренной ВРЛ следует отнести неоптимальное использование энергетического бюджета бортовой аппаратуры, которая при различной добротности наземных приемных трактов (диаметрах антенн) имеет постоянные параметры передающего радиотракта: ЭИИМ, сигнально-кодовую структуру, символьную скорость. Также организация сброса ДЗ предусматривает последовательную передачу их в порядке записи и не учитывает их содержания, актуальности и качества, в то время как по апостериорному анализу условий зондирования часть данных заранее может быть исключена из сброса. Приближенно можно оценить возможность увеличения скорости за счет адаптации параметров БА ВРЛ:
- к диапазону диаметров наземных антенн от 3-х до 12 м ~ до 12 дБ;
- метеоусловиям для Х-диапазона радиоволн до 3 дБ;
- к изменяемой дальности НС→КА ДЗЗ в сеансе связи до ~ 10÷14 дБ в зависимости от орбиты,
т.е. с учетом адаптации к условиям передачи скорость может быть оптимизирована к каждой НС и увеличена до 1÷2 Гбит/сек, что резко поднимает эффективность ВРЛ.
Кроме того, из-за принятой последовательности сброса ДЗ и отсутствия специальных мер по избирательности сброса выявляется недостаточная оперативность доведения именно конкретных востребованных потребителем, актуальных ДЗ, а из-за отсутствия защиты информации появляется возможность их получения другим несанкционированным потребителем, что тоже понижает эффективность системы. Выигрыш в эффективности от использования ВРЛ не только как ретранслятора ДЗ, а как радиолинии с «памятью» с оперативным селективным выбором ДЗ может быть очень значительным, но количественно оценен только оператором самой системы ДЗ, использующим результаты зондирования.
Техническими результатами предлагаемого изобретения являются:
- повышение эффективности ВРЛ максимизацией скорости передачи ДЗ путем поддержания требуемого уровня сигнала на входе наземного приемника при изменении дальности КА → НС в течение сеанса связи за счет изменения уровня выходной мощности бортового передатчика, а также адаптации (оптимизации) сигнально-кодовой структуры к параметрам текущего сеанса связи;
- повышение оперативности ВРЛ за счет приоритетной передачи ДЗ с КА в соответствии с их актуальностью и содержанием.
Указанные технические результаты достигаются тем, что в известную ВРЛ передачи информации с КА ДЗЗ, состоящую из соединенных через радиоканал наземной аппаратуры (НА ВРЛ), содержащей последовательно соединенные наземное антенное устройство, снабженное аппаратурой управления приводом антенны, приемное устройство и устройство демодуляции, синхронизации и декодирования, выход которого соединен с информационным выходом НА ВРЛ, и бортовой аппаратуры (БА ВРЛ), содержащей устройство управления, вход которого соединен с управляющим входом БА ВРЛ, последовательно соединенные ЗУ ДЗ, БФК, передающее устройство и бортовое антенное устройство с приводом, управляющий вход которого соединен с выходом «наведения антенны» устройства управления, в состав НА ВРЛ введено устройство управления и контроля, вход которого соединен с управляющим входом НА ВРЛ, а выход «задания сеансной сигнально-кодовой структуры» - с управляющим входом устройства демодуляции, синхронизации и декодирования. В состав БА ВРЛ введены устройство сопряжения, вход которого соединен с информационным входом БА ВРЛ, и формирователь сигнала дальности, вход которого соединен с выходом «текущих параметров орбиты сеанса» устройства управления. При этом ЗУ ДЗ выполнено в виде последовательно соединенных каталога ДЗ и блока памяти, причем информационный вход каталога ДЗ соединен с первым выходом устройства сопряжения, а управляющий вход - с выходом «установки последовательности передачи ДЗ» устройства управления. Информационный вход блока памяти соединен со вторым выходом устройства сопряжения, а выход - с выходом ЗУ ДЗ. Передающее устройство выполнено в виде последовательно соединенных блока кодирования и модуляции и регулируемого усилителя мощности, причем первый вход блока кодирования и модуляции соединен со входом передающего устройства, второй вход - с выходом «установки параметров сигнально-кодовой структуры» устройства управления, второй вход регулируемого усилителя мощности соединен с выходом формирователя сигнала дальности, а выход - с выходом передающего устройства.
Для исключения несанкционированного доступа (НСД) к ДЗ в состав БА ВРЛ введено бортовое устройство защиты от НСД, при этом БФК снабжен дополнительными входом и выходом, подключенными соответственно к входу и выходу бортового устройства защиты от НСД, а устройство управления дополнительно снабжено выходом шифрокода для установки «ключа», подключенным к управляющему входу устройства защиты от НСД. В состав НА ВРЛ введено наземное устройство защиты от НСД, при этом устройство демодуляции, синхронизации и декодирования снабжено дополнительными входом и выходом, подключенными соответственно к входу и выходу наземного устройства защиты от НСД, а устройство управления и контроля дополнительно снабжено выходом шифрокода для выбора «ключа», подключенным к управляющему входу наземного устройства защиты от НСД.
Сущность изобретения заключается в том, что перед каждым запланированным сеансом связи в БА ВРЛ устанавливаются устройством управления БА ВРЛ рассчитанные в ЦУПе, переданные по командной радиолинии с Земли и заранее записанные в него параметры БА: вид и скорость помехоустойчивого кода, символьная (занимаемая полоса сигнала) и битовая (вид модуляции) скорости, допустимый максимальный уровень мощности, и «ключ» для устройства защиты от НСД, выделенный для каждой конкретной наземной станции в конкретном сеансе связи.
В процессе связи производится переключение уровня выходной мощности регулируемого усилителя по сигналам от формирователя сигнала дальности. При этом моменты переключения определяются матрицей (таблицей) на основе сравнения текущих значений дальности, полученных в составе баллистических данных (БД) через устройство управления от навигационной системы КА, с заложенным в матрице соотношением оптимизированно рассчитанных интервалов дальности (ΔДi) с необходимым для обеспечения достоверности ДЗ уровнем мощности (Pбi) на выходе регулируемого усилителя. БД поступают от навигационной системы КА после входа в зону радиовидимости НС в течение всего сеанса связи. Последовательность выбора ДЗ из ЗУ определяется путем управления каталогом по сигналам из устройства управления, в котором записана выработанная на Земле и переданная по командной радиолинии на борт КА последовательность считывания ДЗ в соответствии с их актуальностью. Оператором системы ДЗЗ в наземную аппаратуру защиты от НСД вводится «ключ», выделенный для наземной станции в данном сеансе связи и соответствующий «ключу» бортовой аппаратуры.
Изобретение будет понятно из блок-схемы на фиг. 2 и нижеследующего описания. (На фиг. 2 блоки 1, 2, 4, 5, 7÷9 имеют наименования, одинаковые с соответствующими блоками фиг. 1):
10 - устройство сопряжения;
11 - каталог ДЗ;
12 - блок памяти;
13 - бортовое устройство защиты от НСД;
14 - блок кодирования и модуляции;
15 - регулируемый усилитель мощности;
16 - формирователь сигнала дальности;
17 - наземное устройство защиты от НСД;
18 - устройство управления и контроля.
Функционирование предлагаемой радиолинии осуществляется следующим образом. Бортовая аппаратура ВРЛ может работать в одном из трех режимов.
Режим «Запись», при котором производится запись данных зондирования в ЗУ ДЗ. Этот режим используется, когда зондирование производится вне зоны радиовидимости «КА ДЗЗ → наземная станция приема». В этом режиме включены только ЗУ ДЗ (1) и устройство сопряжения (10).
Режим «Воспроизведение», когда КА «пролетает» зоны радиовидимости наземных станций, в это время производятся считывание ДЗ из ЗУ ДЗ (1) и передача по радиоканалу на запланированную наземную станцию. В этом режиме включена вся аппаратура ВРЛ, кроме устройства сопряжения (10).
Режим «Непосредственная передача», при котором данные наблюдения записываются в ЗУ ДЗ (1) и одновременно передаются на наземную станцию приема по радиоканалу. При этом из-за разности скоростей поступления ДЗ из системы зондирования и передачи ДЗ информации по радиоканалу на Землю может быть передана только их часть. Объем этой части ДЗ определяется разностью скоростей и длительностью зондирования, ограничивается временем поступления ДЗ от системы наблюдения и длительностью данного сеанса связи. Остальная часть ДЗ записывается в ЗУ ДЗ (1) и передается в последующих сеансах связи в режиме «Воспроизведение».
Функционирование предлагаемого изобретения понятно, если последовательно рассмотреть процессы записи, хранения и воспроизведения ДЗ и их передачи на наземные станции.
Рассмотрим режим «Запись». От установленной на КА системы зондирования в результате покадровой (объектовой), когда зондируются отдельные площади на местности, или маршрутной, когда зондируется «полоса» пролета в течение заданного времени, в устройство сопряжения (10) последовательно поступают ДЗ, сформированные в структуре и тактовой сетке аппаратуры зондирования. Каждый пакет ДЗ кадра или маршрута, поступающий в устройство сопряжения, сопровождается служебной информацией, в которую входят номер кадра или маршрута и параметры зондирования на момент съемки (углы съемки, экспозиция, вид съемки и т.д.). В устройстве сопряжения (10) поток ДЗ трансформируется в тактовую сетку частот и структуру ВРЛ, после чего записывается в свободные ячейки блока памяти (12) в сопровождении присвоенной ему служебной информации. Номера кадров (маршрутов) и номера ячеек блока памяти, в которых они будут храниться до передачи на Землю, записываются параллельно в каталог ДЗ (11). Содержание каталога ДЗ в первом и каждом последующем сеансе связи с НС передается на Землю по каналу ВРЛ и предоставляется оператору системы ДЗЗ для анализа и организации последовательности последующей передачи ДЗ с точки зрения актуальности, содержания ДЗ и распределения по потребителям (НС).
До очередного сеанса связи проводится анализ каталога с учетом заявок на ДЗЗ от потребителей, апостериорных данных об условиях прошедшего зондирования, влияющих на качество ДЗ (метеоусловия и состояние систем КА). Выбранная и оптимизированная для каждого сеанса последовательность передачи ДЗ передается по командной радиолинии и записывается в устройство управления (5) ВРЛ. Вместе с этой последовательностью закладываются для каждого очередного сеанса параметры БА ВРЛ, учитывающие условия связи: добротность приемного тракта НС (диаметр антенны), метеопрогноз в месте приема и т.п. Такими параметрами являются: вид и скорость кодирования, вид модуляции, символьная скорость, максимально допустимая мощность излучения при минимальной дальности, номер «ключа» для аппаратуры защиты от НСД. Таким образом, БА ВРЛ адаптируется к текущим условиям очередного сеанса связи.
В режиме «Воспроизведение» БА ВРЛ функционирует следующим образом. После включения БА ВРЛ в сеанс связи, но до начала излучения, в устройства и блоки аппаратуры вводятся их параметры, максимизирующие скорость передачи информации в этом сеансе; в блок (14) кодирования и модуляции с выхода «установки параметров сигнально-кодовой структуры» устройства управления (5) поступают параметры кода, вид модуляции, значение символьной скорости.
Параметры «ключа» вводятся в устройство (13) защиты от НСД по сигналам, поступающим на его управляющий вход с выхода шифрокода устройства управления (5).
Параметры, максимизирующие скорость и уровень сигнала и неизменяемые в течение сеанса связи: код, символьная скорость, вид модуляции? установлены перед сеансом, поэтому задача поддержания в течение сеанса связи независимо от текущей дальности установленного и максимально допустимого международным регламентом радиосвязи уровня сигнала (Pс) на входе приемного устройства (8) НС может быть решена за счет изменения уровня мощности на выходе регулируемого усилителя (15) БА ВРЛ (в первом приближении пропорционально квадрату дальности «КА ДЗ3-НС» при условии PвыхРУМ≤Pдоп радиорегламента).
Для этого определяется расчетным путем оптимизированная и обобщенная по множеству параметров сигнально-кодовой структуры и характеристик приемных средств НС зависимость Pс от дальности и угла места (α) линии визирования «НС - КА ДЗЗ». Учет угла места необходим, т.к. он влияет на атмосферные и поляризационные потери, а также шумовую температуру антенны.
Все необходимые расчеты производятся в соответствии с формулами и методикой, изложенными в книге «Энергетические характеристики космических радиолиний» под ред. О.Л. Зенкевича, Москва, изд-во «Советское радио», 1972, стр. 5÷8, 18÷27, 29÷34.
В результате расчетов вычисляется усредненная оптимизированная функция Pб=f(Д). Регулируемый усилитель мощности (15) практически может быть реализован только с дискретным переключением уровней мощности и ограниченным числом ступеней. Полученная функция Pб=f(Д) ступенчато аппроксимируется с учетом фактической величины мощности регулируемого усилителя (15), числа ступеней и ограничений, накладываемых регламентом радиосвязи.
Выражение Pб=f(Д) можно записать в виде матрицы (или таблицы), где каждому значению Pi соответствует отрезок дальности ΔДi. При этом ΔДi=Дi-Дi+1 при движении КА ДЗЗ от входа в зону радиовидимости и до прохождения «параметра», и ΔДi=Дi-Дi-1 после его прохождения.
Значение текущей дальности с требуемой периодичностью поступает в течение сеанса связи в формирователь сигнала дальности (16) через устройство управления (5) БА ВРЛ в составе баллистических данных от навигационной системы КА ДЗЗ. Переключение уровня мощности регулируемого усилителя (15) происходит при выходе значения текущей дальности за нормы, установленные значением ΔДi для соответствующего уровня Pi.
Выбор ДЗ из блока памяти (12) в требуемой последовательности обеспечивается управлением каталогом ДЗ (11), который каждый раз выбирает запланированную ячейку из блока памяти (12) после получения на свой управляющий вход ее номера с выхода «установки последовательности передачи ДЗ» устройства управления (5). Порядок сброса определяется заданной оператором системы ДЗЗ и переданной на борт КА по командной радиолинии программой.
Защита от НСД обеспечивается установкой одинаковых «ключей» в бортовой и наземной аппаратуре защиты, исключающих прием ДЗ другими потребителями.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОКОМПЛЕКС ДЛЯ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ, УСТАНАВЛИВАЕМЫХ НА КОСМИЧЕСКИЕ АППАРАТЫ | 2016 |
|
RU2604355C1 |
| Многофункциональный космический аппарат | 2016 |
|
RU2640167C1 |
| КОСМИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2020 |
|
RU2747240C1 |
| Многофункциональный наземный комплекс управления, приема и обработки информации | 2024 |
|
RU2828016C1 |
| Космический комплекс дистанционного зондирования Земли высоко-детального уровня наблюдения наземных объектов | 2020 |
|
RU2753201C1 |
| СИСТЕМА ВЫСОКОСКОРОСТНОЙ СВЯЗИ С КОСМИЧЕСКИМИ АППАРАТАМИ С ПРИМЕНЕНИЕМ ТЕХНОЛОГИЙ АВТОМАТИЧЕСКОГО ВЗАИМНОГО НАВЕДЕНИЯ ОСТРОНАПРАВЛЕННЫХ АНТЕНН | 2023 |
|
RU2816351C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| СПОСОБ ГЛОБАЛЬНОЙ НИЗКООРБИТАЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2570833C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| Спутниковая система, управляемая по межспутниковой радиолинии | 2018 |
|
RU2690966C1 |
Изобретение относится к радиоканалам передачи цифровой информации, конкретно, к космическим высокоскоростным радиолиниям (ВРЛ) передачи данных наблюдения с космических аппаратов (КА) дистанционного зондирования Земли (ДЗЗ). Техническими результатами являются повышение скорости передачи данных зондирования путем адаптации (оптимизации) бортовой аппаратуры ВРЛ к параметрам текущего сеанса связи за счет оптимизации использования энергетического бюджета, а также повышение оперативности ВРЛ за счет использования «памяти» радиоканала для организации передачи данных потребителям в последовательности, заданной оператором системы ДЗЗ. Суть изобретения заключена в установке перед каждым сеансом связи сигнально-кодовой структуры передаваемого потока, оптимальной к конкретным параметрам приемных технических средств и условиям сеанса для обеспечения максимального уровня сигнала на входе наземного приемника, допустимого международным регламентом радиосвязи, и поддержания его в течение сеанса связи вне зависимости от дальности путем скачкообразного изменения уровня мощности регулируемого усилителя по сигналам от формирователя дальности. Избирательная передача данных обеспечивается с помощью каталога данных, формируемого в процессе записи данных в «память» ВРЛ, через который оператор системы ДЗЗ управляет процессом сброса. 1 з.п. ф-лы, 2 ил.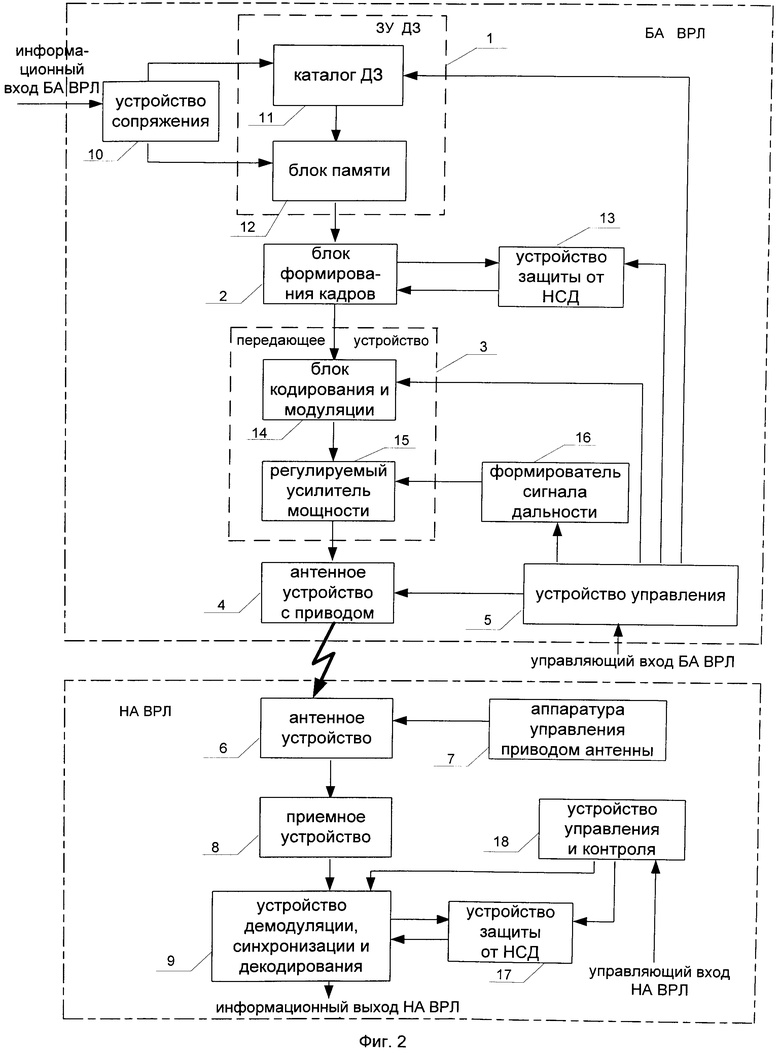
1. Высокоскоростная радиолиния (ВРЛ) передачи информации с космических аппаратов дистанционного зондирования Земли (КА ДЗЗ), состоящая из соединенных через радиоканал наземной аппаратуры (НА ВРЛ), содержащей последовательно соединенные наземное антенное устройство, снабженное аппаратурой управления приводом антенны, приемное устройство и устройство демодуляции, синхронизации и декодирования, выход которого соединен с информационным выходом НА ВРЛ, и бортовой аппаратуры (БА ВРЛ), содержащей устройство управления, вход которого соединен с управляющим входом БА ВРЛ, последовательно соединенные запоминающее устройство (ЗУ) данных зондирования (ДЗ), блок формирования кадров, передающее устройство и бортовое антенное устройство с приводом, при этом управляющий вход бортового антенного устройства с приводом соединен с выходом «наведения антенны» устройства управления, отличающаяся тем, что в состав НА ВРЛ введено устройство управления и контроля, вход которого соединен с управляющим входом НА ВРЛ, а выход «задания сеансной сигнально-кодовой структуры» - с управляющим входом устройства демодуляции, синхронизации и декодирования, в состав БА ВРЛ введены устройство сопряжения, вход которого соединен с информационным входом БА ВРЛ, и формирователь сигнала дальности, вход которого соединен с выходом «текущих параметров орбиты сеанса» устройства управления, при этом ЗУ ДЗ выполнено в виде последовательно соединенных каталога ДЗ и блока памяти, причем информационный вход каталога ДЗ соединен с первым выходом устройства сопряжения, а управляющий вход - с выходом «установки последовательности передачи ДЗ» устройства управления, информационный вход блока памяти соединен со вторым выходом устройства сопряжения, а выход - с выходом ЗУ ДЗ, передающее устройство выполнено в виде последовательно соединенных блока кодирования и модуляции и регулируемого усилителя мощности, причем первый вход блока кодирования и модуляции соединен со входом передающего устройства, второй вход - с выходом «установки параметров сигнально-кодовой структуры» устройства управления, второй вход регулируемого усилителя мощности соединен с выходом формирователя сигнала дальности, а выход - с выходом передающего устройства.
2. ВРЛ передачи информации с КА ДЗЗ по п. 1, отличающаяся тем, что в состав БА ВРЛ введено бортовое устройство защиты от несанкционированного доступа (НСД), при этом БФК снабжен дополнительными входом и выходом, подключенными соответственно к входу и выходу бортового устройства защиты от НСД, а устройство управления дополнительно снабжено выходом шифрокода, подключенным к управляющему входу устройства защиты от НСД, в состав НА ВРЛ введено наземное устройство защиты от НСД, при этом устройство демодуляции, синхронизации и декодирования снабжено дополнительными входом и выходом, подключенными соответственно к входу и выходу наземного устройства защиты от НСД, а устройство управления и контроля дополнительно снабжено выходом шифрокода, подключенным к управляющему входу наземного устройства защиты от НСД.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2010 |
|
RU2480788C2 |
| CN102142189, 03.08.2011 | |||
| US2006080037 A1, 13.04.2006 | |||
| CN102401898 A, 04.04.2012 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |

