Изобретение относится к радиотехнике и может быть использовано в радиолокационных системах с синтезированной апертурой антенны и непрерывным излучением сигналов (РСА НИ) для решения различных задач дистанционного зондирования Земли с помощью летательных и космических аппаратов.
Известна моноимпульсная радиолокационная система (РЛС) с импульсным фазоманипулированным зондирующим сигналом, используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА) (1).
Это изобретение решает задачу надежности РЛС при установке на БПЛА, что позволит повысить помехоустойчивость по отношению к пассивным помехам, например, в виде отражений от местных предметов.
Известна радиолокационная система с перестройкой несущей частоты и режимом СДЦ (2). Применяется при разработке помехоустойчивых радиолокационных систем, сохраняющих работоспособность в сложной электромагнитной обстановке, и при наличии интенсивных мешающих отражений от пассивных помех, местных предметов и метеообразований.
Технический результат заключается в повышении помехозащищенности по отношению к активным помехам.
Наиболее близким аналогом по технической сущности и достигаемому эффекту, принятым в качестве прототипа, предлагается радиолокационная система с синтезированной апертурой антенны и непрерывным излучением сигналов беспилотного летательного аппарата [3]; бортовой сегмент которой включает: бортовую цифровую вычислительную машину (БЦВМ) управления, навигационную систему, последовательно соединенные генератор линейно-частотной модуляции сигнала, управляемый БЦВМ, передатчик, передающая антенна, последовательно включенные приемная антенна, приемник, балансный смеситель, на второй вход которого через аттенюатор поступает сигнал от генератора линейно-частотной модуляции, аналого-цифровой преобразователь, устройство регистрации радиолокационных данных, куда также записываются навигациионные данные от навигационной системы; наземный сегмент включает последовательно соединенные: буферное запоминающее устройство, цифровой спектроанализатор, блок компенсации траекторных нестабильностей и автофокусировки, блок сжатия по азимуту, в котором реализуются алгоритмы синтезирования апертуры антенны на основании преобразования Фурье [3]; устройство отображения информации и устройство регистрации радиолокационного изображения.
Указанная радиолокационная система способна получать радиолокационное изображение местности с высокой детальностью в любых погодных условиях круглосуточно, при наличии дыма и пыли, решать задачи навигации. Однако для получения радиолокационных изображений в реальном масштабе времени требуется высокоскоростной канал передачи радиолокационных данных на наземный сегмент радиолокационной системы, для которого технически сложно обеспечить приемлемый уровень помехозащищенности.
Технической задачей изобретения является снижение потребной скорости передачи и повышение помехозащищенности при передаче радиолокационных данных с бортового сегмента радиолокационной системы РСА НИ на наземный сегмент.
Решение указанной задачи достигается учетом спектральных характеристик радиолокационных данных.
Для достижения заявленного технического результата в состав радиолокационной системы РСА НИ предлагается ввести дополнительно в бортовой сегмент: последовательно включенные устройство формирования кадра радиолокационных данных, вход которого подключен к выходу аналого-цифрового преобразователя и выходу навигационной системы; модулятор сигналов с широтно-импульсной модуляцией, умножитель, второй вход которого подключен через аттенюатор к выходу генератора сигнала линейно-частотной модуляции, высокочастотный модуль передатчика радиолинии, антенну передатчика радиолинии; в наземный сегмент: последовательно включенные антенну приемника радиолинии, дешифратор широтно-импульсной модуляции, регистр сдвига; кроме того, изменить режим работы генератора сигнала линейно-частотной модуляции, формирующего сигналы с линейно-частотной модуляцией с периодом модуляции, равным интервалу синтезирования апертуры антенны.
Такое построение схемы РЛС ДЗЗ позволяет получать радиолокационные данные с бортового сегмента по помехозащищенному низкоскоростному каналу связи, обрабатывать их и получать радиолокационные изображения с требуемой разрешающей способностью в реальном масштабе времени.
Сущность изобретения поясняется дальнейшим описанием и чертежом, на котором представлена структурная схема РЛС ДЗЗ, в состав которой входят:
1 - антенна передатчика,
2 - передатчик,
3 - генератор сигнала линейно-частотной модуляции,
4 - управляемой БЦВМ,
5 - приемная антенна,
6 - приемник,
7 - балансный смеситель,
8 - навигационная система,
9 - устройство регистрации радиолокационных данных,
10 - аналого-цифровой преобразователь,
11 - устройство формирования кадра радиолокационных данных,
12 - модулятор сигналов с широтно-импульсной модуляции,
13 - умножитель,
14 - высокочастотный модуль передатчика радиолинии,
15 - антенну передатчика радиолинии,
16 - антенну приемника радиолинии,
17 - высокочастотный модуль приемника радиолинии,
18 - дешифратор широтно-импульсной модуляции,
19 - регистр сдвига
20 - буферное запоминающее устройство,
21 - цифровой спектроанализатор,
22 - блок компенсации траекторных нестабильностей и автофокусировки,
23 - блок сжатия по азимуту,
24 - устройство отображения информации,
25 - устройство регистрации радиолокационных изображений.
Радиолокационная система дистанционного зондирования Земли с синтезированной апертурой и непрерывным излучением работает следующим образом.
Напряжение на высокой частоте с выхода генератора сигнала линейно-частотной модуляцией 3, период модуляции и девиация которого задается управляемой БЦВМ 4, подается на вход передатчика 2, на выходе которого формируется сигнал, излучаемый антенной передатчика 1 в направлении полосы захвата участка местности.
Отразившись от участка местности, радиосигналы принимаются приемной антенной 5, усиливаются в приемнике 6 и проходят на 1-й вход балансного смесителя 7. Одновременно на 2-й вход смесителя 7 через аттенюатор подаются сигналы соответственно с выхода генератора сигнала линейно-частотной модуляции 3, в результате чего на выходе балансного смесителя 7 присутствуют сигналы биений, частоты которых пропорциональны дальностям до целей в пределах полосы захвата участка местности. Далее действительная и мнимая часть сигналов биений подвергается аналого-цифровому преобразованию в двухканальном АЦП 10. Сигналы с выхода АЦП запоминаются в устройстве регистрации радиолокационных данных 9, куда одновременно и синхронно записываются навигационные данные от навигационной системы 8, представляющие собой координатную информацию о центре масс летательного аппарата. Для передачи радиолокационных и навигационных данных на наземный сегмент РЛС ДЗЗ в устройстве формирования кадра радиолокационных данных 11 формируется кадр радиолокационных данных, в который входят радиолокационные данные (сигналы биений) и навигационные данные от навигационной системы 8, представляющие собой координатную информацию о центре масс летательного аппарата и используемые в дальнейшей обработке в блоке сжатия по азимуту 23. Кадр радиолокационных данных преобразуется в последовательный код, каждый двоичный символ которого кодируется в широтно-импульсном модуляторе 12 и поступает на 1-й вход умножителя 13, на второй вход которого подается через аттенюатор сигнал с выхода генератора сигнала линейно-частотной модуляцией 3. Таким образом, на выходе умножителя 13 формируется высокочастотный сигнал с широкополосной несущей, который усиливается в высокочастотном модуле передатчика радиолинии 14 и излучается антенной передатчика радиолинии 15 бортового сегмента РЛС ДЗЗ.
Принятые антенной приемника радиолинии 17 на наземном сегменте РЛС ДЗЗ сигналы поступают через высокочастотный модуль передатчика радиолинии 17, на дешифратор широтно-импульсной модуляции 18, где производится согласованная обработка принятых сигналов, которые запоминаются в буферном запоминающем устройстве 20 и одновременно в последовательном коде поступают на вход регистра сдвига 19. Где поступающие радиолокационные данные сигналов биений с частотой дискретизации аналого-цифрового преобразователя 10 накапливаются в течение интервала наблюдения, равного интервалу синтезирования апертуры антенны. После полного заполнения регистра сдвига 19 происходит параллельное считывание накопленных данных в цифровой спектроанализатор 21, который реализует операцию прямого преобразования Фурье. На выходе цифрового спектроанализатора 21 в спектральной области формируется полоска дальности с разрешением, обратно пропорциональным интервалу наблюдения. Полоски дальности с интервалом, равным периоду дискретизации цифрового спектроанализатора 21, поступают в блок сжатия по азимуту 23 и в блок компенсации траекторных нестабильностей и автофокусировки 22, где производится согласованная (оптимальная) обработка в спектральной области и обратное преобразование Фурье. Результатом обработки является радиолокационное изображение, которое визуально отображается в устройстве отображения информации 24 и запоминается в устройстве регистрации радиолокационных изображений 25.
На основании приведенного описания и чертежа предлагаемая радиолокационная система может быть изготовлена при использовании известных комплектующих изделий и известного в радиоэлектронной промышленности технологического оборудования и использована на беспилотных летательных аппаратах в качестве радиолокационной системы дистанционного зондирования Земли.
Источники информации
1. Патент РФ №2309430, МПК G01S 13/44 «Моноимпульсная радиолокационная система».
2. Патент РФ №2245562, МПК G01S 13/58 «Радиолокационная система с перестройкой несущей частоты и режимом СДЦ».
3. Антипов В.Н., Колтышев Е.Е., Мухин В.В., Печенников А.В., Фролов А.Ю., Янковский В.Т. Радиолокационная система беспилотного летательного аппарата // Радиотехника, 2006, №7. С.14-20 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2017 |
|
RU2692238C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ВЫСОКОГО РАЗРЕШЕНИЯ С АКТИВНОЙ ФАЗИРОВАННОЙ РЕШЕТКОЙ ДЛЯ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2429990C1 |
| КОСМИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2020 |
|
RU2747240C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
Изобретение относится к радиотехнике и может быть использовано в радиолокационных системах с синтезированной апертурой антенны и непрерывным излучением сигналов (РСА НИ) для решения задач дистанционного зондирования Земли с помощью летательных и космических аппаратов. Достигаемый технический результат - повышение помехозащищенности по отношению к активным помехам. Указанный результат достигается путем включения в состав структурной схемы, известной радиолокационной системы беспилотного летательного аппарата, низкоскоростного радиоканала передачи радиолокационных данных и изменение режима работы генератора, формирующего сигналы с линейно-частотной модуляцией с периодом модуляции, равным интервалу синтезирования апертуры антенны, который одновременно выполняет функции задающего генератора широкополосной несущей канала передачи радиолокационных данных. Предлагаемая система позволяет получать радиолокационные данные с бортового сегмента РСА НИ по помехозащищенному низкоскоростному каналу связи, обрабатывать их и получать радиолокационные изображения с требуемой разрешающей способностью в реальном масштабе времени. 1 ил.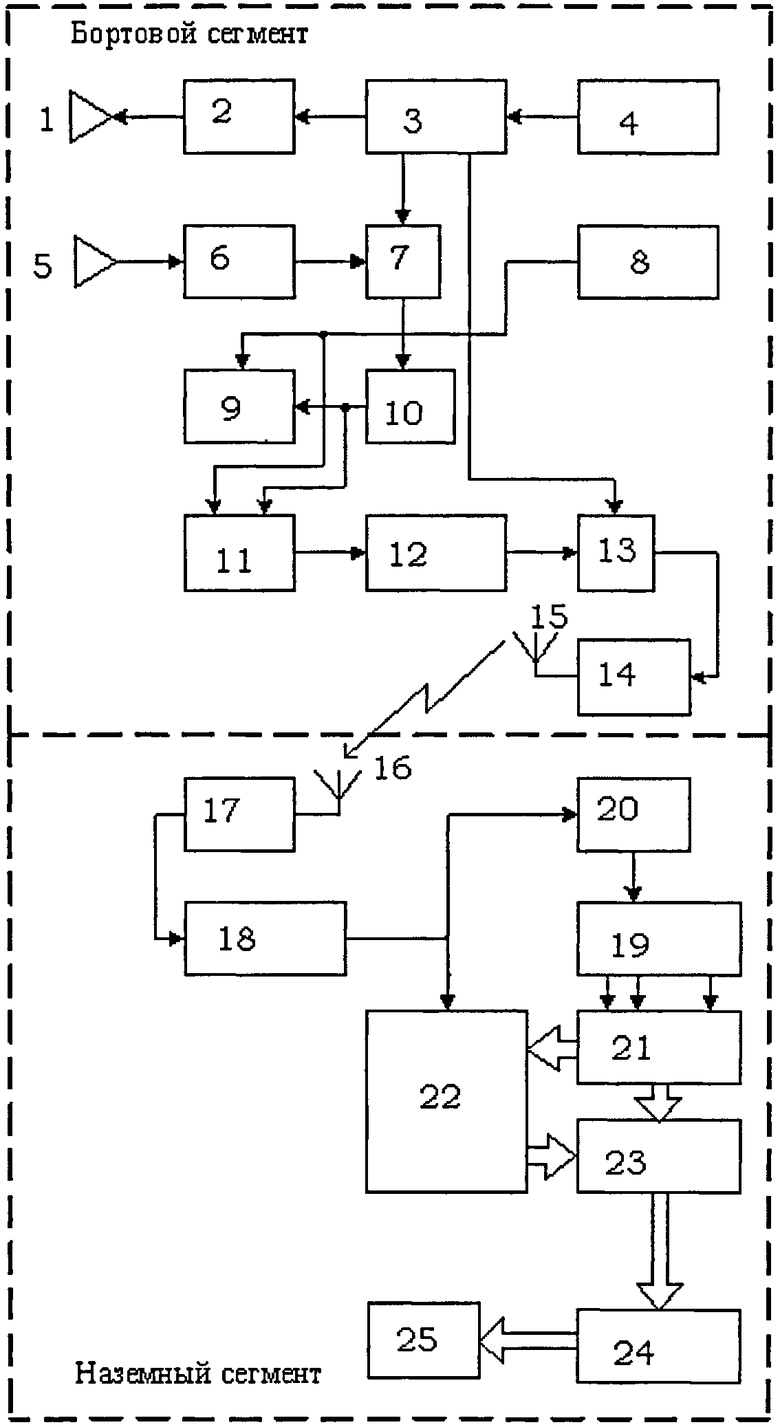
Радиолокационная система дистанционного зондирования Земли, бортовой сегмент которой включает бортовую цифровую вычислительную машину (БЦВМ) управления, навигационную систему, последовательно соединенные генератор линейно-частотной модуляции (ЛЧМ) сигнала, управляемый БЦВМ, передатчик, передающую антенну, последовательно включенные приемную антенну, приемник, балансный смеситель, на второй вход которого через аттенюатор поступает сигнал от генератора ЛЧМ, аналого-цифровой преобразователь, устройство регистрации радиолокационных данных, куда также записываются навигационные данные от навигационной системы, а наземный сегмент включает последовательно соединенные буферное запоминающее устройство, цифровой спектроанализатор, блок компенсации траекторных нестабильностей и автофокусировки, блок сжатия по азимуту, где производится согласованная (оптимальная) обработка в спектральной области и обратное преобразование Фурье, устройство отображения информации и устройство регистрации радиолокационных изображений, отличающаяся тем, что дополнительно введены в бортовой сегмент последовательно включенные устройство формирования кадра радиолокационных данных, вход которого подключен к выходу аналого-цифрового преобразователя и выходу навигационной системы, модулятор сигналов с широтно-импульсной модуляцией, умножитель, второй вход которого подключен через аттенюатор к выходу генератора ЛЧМ, высокочастотный модуль передатчика радиолинии, антенну передатчика радиолинии, в наземный сегмент - последовательно включенные антенну приемника радиолинии, дешифратор широтно-импульсной модуляции, выход которого связан с выходом буферного запоминающего устройства, регистр сдвига, связывающий буферное запоминающее устройство и цифровой спектроанализатор, выход которого, в свою очередь, связан с входом блока сжатия по азимуту, причем период модуляции генератора, формирующего сигналы с линейно-частотной модуляцией, равен интервалу синтезирования антенны.
| АНТИПОВ В.Н | |||
| и др | |||
| Радиолокационная система беспилотного летательного аппарата | |||
| - Радиотехника, 2006, №7, с.14-20 | |||
| СПОСОБ ФОРМИРОВАНИЯ ЗОНДИРУЮЩИХ СИГНАЛОВ КОМПЛЕКСНОЙ ЛОКАЦИОННОЙ СИСТЕМЫ | 2002 |
|
RU2222031C1 |
| RU 2009111512 А, 10.10.2010 | |||
| Способ обжига портландцементного клинкера во взвешенном состоянии во вращающихся печах | 1952 |
|
SU99874A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| Передвижные подмости для ремонта покрытий зданий | 1949 |
|
SU89770A1 |
| WO 2010039303 A3, 22.07.2010 | |||
| US 20100049376 A1, 25.02.2010 | |||
| ГЛУШИТЕЛЬ ШУМА ДЛЯ КОМПРЕССОРОВ ДОМАШНИХ ХОЛОДИЛЬНИКОВ | 1967 |
|
SU216897A1 |
| Устройство для выборки информации из блоков памяти | 1977 |
|
SU649034A1 |
| CN 101770027 A, 07.07.2010. | |||

