Уровень техники
Настоящее изобретение относится к общей области авиации. Предпочтительно, но не ограничительно, его применяют для турбомашин, в частности для турбореактивных двигателей.
В частности, изобретение касается измерения рабочих параметров двигателя летательного аппарата, например, таких как давление газового потока, циркулирующего в двигателе.
Как известно, контроль и регулирование авиационного двигателя производят на основании измерений, выдаваемых соответствующими вычислительными устройствами самолета, которые основаны на технологиях, использующих датчики и известных своей стабильностью и своей точностью. В частности, это относится к атмосферному давлению, обозначаемому Р0, которое выдается вычислительным устройством, предназначенным для измерения атмосферных параметров (или «Air Date Computer» на английском языке), использующим, например, датчики кварцевого типа или датчики вибрационного типа, отличающиеся долгосрочной точностью.
Для упрощения текста измерения давления, выдаваемые этими вычислительными устройствами самолета, будут в дальнейшем называться «самолетными измерениями».
Самолетное измерение атмосферного давления используется блоком управления и регулирования двигателя (известный также под названием FADEC от Full Authority Digital Engine Control), в частности для регулирования тяги двигателя самолета. читывая важность этого параметра, блок FADEC использует также измерение атмосферного давления, производимое другим датчиком, который установлен в вычислительном устройстве двигателя самолета.
Это измерение, называемое «моторным измерением» (в отличие от самолетного измерения), используют в случае утери самолетных измерений атмосферного давления для ограничения изменения тяги двигателя. Следовательно, оно должно быть точным и регламентировано строгими требованиями с целью соблюдения максимального изменения тяги в случае утери самолетных измерений.
Для соблюдения этих регламентных требований разработчики двигателей предусматривают первое решение, согласно которому используют моторные датчики с хорошими характеристиками, то есть близкими к характеристикам самолетных датчиков. Однако такие датчики являются очень дорогими, учитывая уровень их точности.
Кроме того, датчики, установленные на двигателе, подвергаются гораздо более сильному воздействию термомеханической среды, чем самолетные датчики. Следовательно, в целом очень трудно гарантировать стабильность характеристик этих датчиков при долгосрочном использовании.
Так, часто бывает, что после нескольких лет эксплуатации моторный датчик показывает большую погрешность смещения нуля (известное также под названием «погрешность нуля» или «offset» на английском языке). Поскольку датчик должен работать с соблюдением регламентных норм, несмотря на эту значительную погрешность смещения нуля, он должен иметь очень высокую точность в новом состоянии, чтобы оставаться как можно дольше в диапазоне допуска.
Объект и сущность изобретения
Настоящее изобретение призвано устранить эти недостатки и предложить способ коррекции текущего измерения давления газового потока, циркулирующего в двигателе, приводящем в движение летательный аппарат, причем это измерение поступает в ходе полета летательного аппарата от датчика, установленного в двигателе. Согласно изобретению, этот способ коррекции содержит:
- этап оценки погрешности смещения нуля датчика на основании разности, существующей между:
- калибровочным измерением давления газового потока, выдаваемым датчиком, установленным в двигателе; и
- измерением атмосферного давления, выдаваемым датчиком летательного аппарата, причем этот датчик летательного аппарата обладает точностью измерения, превышающей точность датчика, установленного в двигателе;
при этом калибровочное измерение и измерение атмосферного давления осуществляют в условиях, при которых датчик, установленный в двигателе, и датчик летательного аппарата подвергаются действию одинакового окружающего атмосферного давления; и
- этап вычитания оценочной погрешности смещения нуля из текущего измерения давления газового потока.
Соответственно объектом изобретения является также устройство коррекции текущего измерения давления газового потока, циркулирующего в двигателе, приводящем в движение летательный аппарат, причем это измерение поступает в ходе полета летательного аппарата от датчика, установленного в двигателе, при этом устройство содержит:
- средства для получения:
- калибровочного измерения давления газового потока, выдаваемого датчиком, установленным в двигателе;
- измерения атмосферного давления, выдаваемого датчиком летательного аппарата, причем этот датчик летательного аппарата обладает точностью измерения, превышающей точность датчика, установленного в двигателе;
при этом калибровочное измерение и измерение атмосферного давления осуществляют в условиях, при которых датчик, установленный в двигателе, и датчик летательного аппарата подвергаются действию одинакового окружающего атмосферного давления;
- средства для оценки погрешности смещения нуля датчика, установленного в двигателе, на основании разности, существующей между калибровочным измерением и измерением атмосферного давления; и
- средства для вычитания оценочной погрешности смещения нуля из текущего измерения давления газового потока.
Следует отметить, что в рамках изобретения термин «датчик летательного аппарата» противопоставлен термину «датчик, установленный в двигателе» и обозначает датчик, размещенный в летательном аппарате снаружи двигателя.
Таким образом, изобретением предлагается корректировать моторные измерения давления газового потока, циркулирующего в двигателе, при помощи самолетных измерений атмосферного давления. Эти самолетные измерения известны своей точностью и своей стабильностью с учетом датчиков, классически используемых в летательных аппаратах.
Текущие моторные измерения, корректируемые согласно изобретению, могут касаться давления газового потока, измеряемого в разных местах двигателя: речь может идти, например, об атмосферном давлении на входе двигателя, о давлении газового потока на выходе вентилятора, если двигатель является турбореактивным двигателем, и т.д. В частности, изобретение позволяет корректировать измерения давления, используемые для регулирования тяги или для контроля двигателя, поскольку это давление характеризуется диапазоном значений, превышающим или равным диапазону значений атмосферного давления.
Таким образом, больше нет необходимости устанавливать в двигателе сверхточные и сверхдорогие датчики, так как изобретение позволяет компенсировать неточность моторных датчиков. Предпочтительно изобретение находит свое применение для моторных датчиков, неточность которых связана в основном с погрешностью смещения нуля.
В частности, изобретением предлагается оценивать погрешность нуля моторного датчика на основании измерений атмосферного давления, осуществляемых во время заранее определенных точек работы двигателя и летательного аппарата, и вычитать эту оценку из моторного измерения для коррекции смещения нуля датчика, установленного на двигателе.
В данном случае под погрешностью смещения нуля или под погрешностью нуля следует понимать погрешность в измерении переменной Х, тогда как эта переменная имеет нулевое значение. Погрешность смещения нуля не зависит от значения измеряемой переменной.
Рабочие точки, выбираемые для оценки погрешности смещения нуля, соответствуют условиям, при которых датчик, установленный в двигателе, и датчик летательного аппарата подвергаются действию одинакового окружающего атмосферного давления. Разумеется, чтобы удовлетворять этому условию, следует учитывать разницу в высоте установки датчиков, иначе говоря, разность высоты между рассматриваемыми моторным датчиком и самолетным датчиком.
Таким образом, предпочтительно измерения осуществляют на не работающем двигателе (то есть перед запуском двигателя или при заданной температуре вычислительного устройства двигателя после заданного времени остановки двигателя, чтобы устранить погрешность, связанную с температурным гистерезисом) и во время удержания летательного аппарата неподвижным на земле, то есть, например, для самолета, приводимого в движение турбореактивным двигателем непосредственно после инициализацией блока FADEC.
В таких условиях другие факторы неточности, отличные от погрешности смещения нуля, которые могут влиять на самолетные и моторные датчики, например такие как погрешности калибровки, гистерезис по давлению и/или по температуре, окружающая среда датчиков, имеют ограниченное влияние на измерения, выдаваемые самолетными и моторными датчиками, или, во всяком случае, имеют относительно сходное влияние на измерения, выдаваемые самолетным датчиком, и на измерения, выдаваемые моторным датчиком.
Иначе говоря, в таких условиях разность между рассматриваемым значением давления газового потока, циркулирующего в двигателе, выдаваемым датчиком, установленным на двигателе, и значением атмосферного давления, выдаваемым датчиком летательного аппарата, будет отнесена изобретением в основном к погрешности смещения нуля датчика, установленного на двигателе. Действительно, поскольку датчик летательного аппарата является более точным и более стабильным, чем моторный датчик, считается, что его погрешностью смещения нуля можно пренебречь.
Следовательно, вычитая эту разность из моторного измерения, когда летательный аппарат производит полет, получают более точное измерение давления газового потока, причем при любом рабочем режиме летательного аппарата и двигателя.
Таким образом, благодаря изобретению разработчики двигателей могут прибегать к использованию более дешевых датчиков, даже подверженных более значительной погрешности смещения нуля, все же обеспечивая при этом точность измерения, которая позволяет соблюдать действующие регламентные нормы (то есть соблюдать максимальное колебание тяги при утере самолетных измерений).
Кроме того, оценку погрешности смещения нуля можно осуществлять в различные моменты срока службы оборудования летательного аппарата, чтобы корректировать возможное со временем смещение нуля датчика, установленного на двигателе.
Еще одним объектом изобретения является турбомашина, содержащая устройство коррекции в соответствии с изобретением.
В частном варианте выполнения различные этапы способа определены в командах компьютерных программ.
Следовательно, объектом изобретения является также компьютерная программа на носителе информации, причем эту программу можно применять в устройстве коррекции или, в целом, в компьютере, причем эта программа содержит команды, предназначенные для осуществления этапов описанного выше способа коррекции.
Эта программа может использовать любой язык программирования и может представлять собой исходный код, объектный код или код, промежуточный между исходным кодом и объектным кодом, например, в частично компилированной форме или в любой другой соответствующей форме.
Объектом изобретения является также носитель информации, читаемый компьютером и содержащий команды вышеуказанной компьютерной программы.
Носитель информации может быть любым устройством, выполненным с возможностью хранения программы. Например, носитель может содержать средство хранения, такое как ROM, например CD-ROM или ROM электронной микросхемы, или средство магнитной записи, например дискету (floppy disc) или жесткий диск.
С другой стороны, носитель информации может быть передаваемым носителем, например электрическим или оптическим сигналом, который можно передавать через электрический или оптический кабель, по радио или при помощи других средств. В частности, программу в соответствии с изобретением можно загружать дистанционно через сеть типа Интернет.
В альтернативном варианте носителем информации может быть интегральная схема, в которую включена программа, при этом схема выполнена с возможностью исполнения программы или с возможностью использования при осуществлении рассматриваемого способа.
Еще одним объектом изобретения является система измерения давления газового потока, циркулирующего внутри двигателя, приводящего в движение летательный аппарат, содержащая:
- первый датчик давления газового потока, причем этот первый датчик установлен в двигателе;
- второй датчик атмосферного давления, установленный в летательном аппарате снаружи двигателя и обладающий точностью измерения, превышающей точность первого датчика;
- средства включения:
- калибровочного измерения давления газового потока первым датчиком; и
- измерения атмосферного давления вторым датчиком;
в условиях, при которых первый датчик и второй датчик летательного аппарата подвержены действию одинакового окружающего атмосферного давления; и
- устройство коррекции в соответствии с изобретением, выполненное с возможностью коррекции текущего измерения давления, выдаваемого во время полета летательного аппарата первым датчиком и с возможностью оценки погрешности смещения нуля первого датчика на основании разности, существующей между измерением атмосферного давления и калибровочным измерением.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания не ограничительного примера выполнения со ссылками на прилагаемые чертежи, на которых:
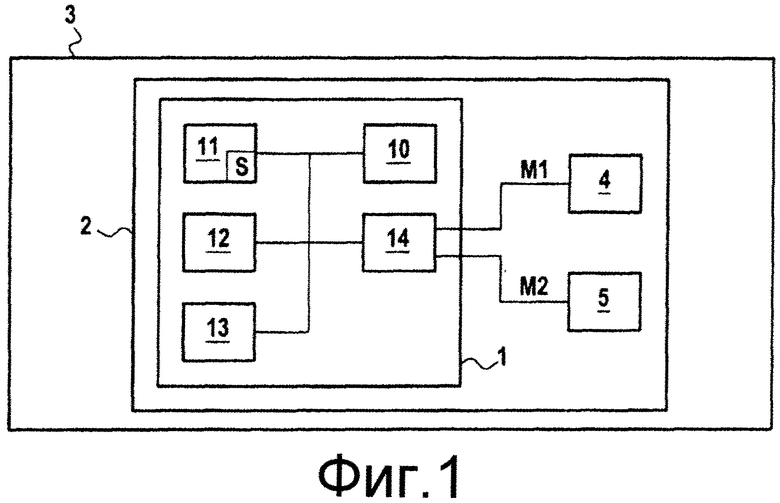
фиг.1 представляет устройство коррекции в соответствии с изобретением в его окружающей среде согласно частному варианту выполнения;
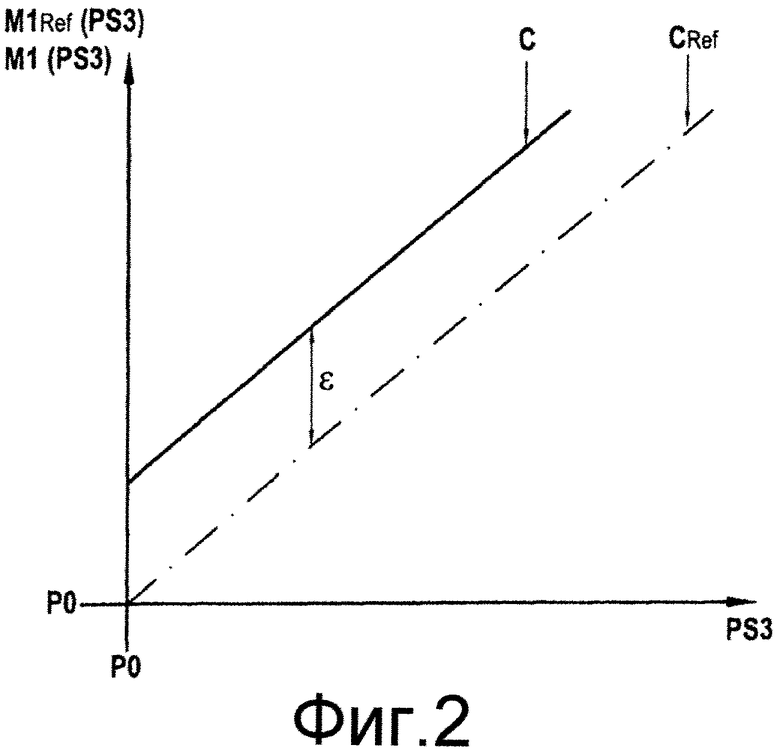
фиг.2 схематически иллюстрирует пример погрешности смещения нуля моторного датчика, показанного на фиг.1;
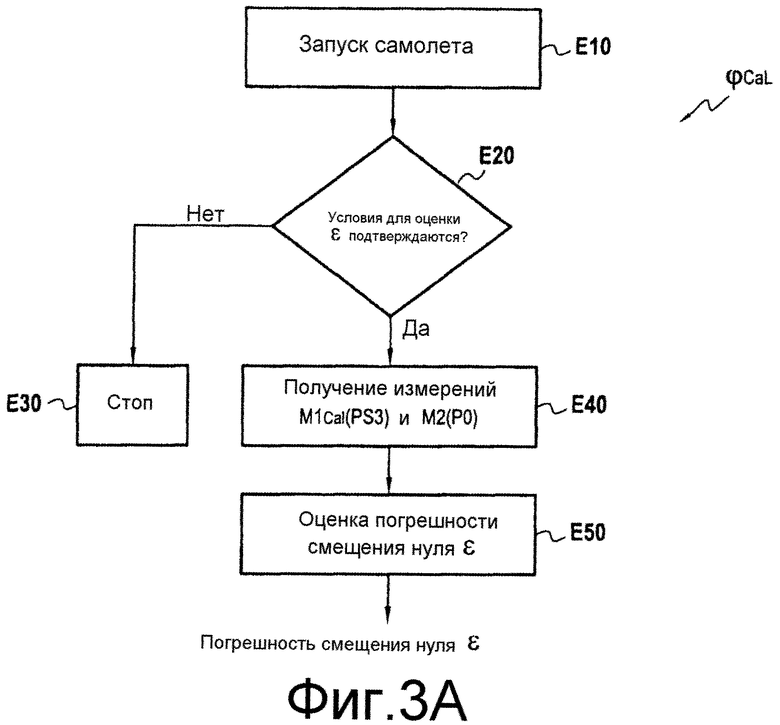
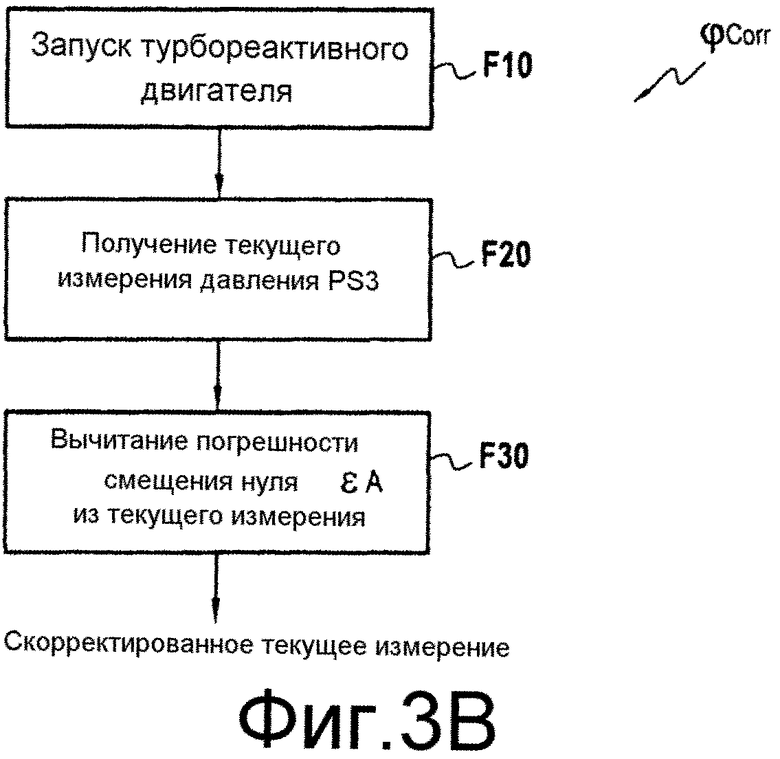
фиг.3А и 3В представляют в виде блок-схемы основные этапы способа коррекции в соответствии с изобретением согласно частному варианту выполнения, в котором применяют устройство, показанное на фиг.1.
Подробное описание варианта выполнения
На фиг.1 в своей окружающей среде показано устройство 1 коррекции моторного измерения давления М1 в соответствии с изобретением в частном варианте выполнения.
В рассматриваемом примере измерение М1 является текущим измерением статического давления воздуха на выходе компрессора высокого давления турбореактивного двигателя 2, приводящего в движение самолет 3. Это измерение поступает во время полета самолета от датчика 4, установленного в турбореактивном двигателе, например на наружном корпусе турбореактивного двигателя.
Вместе с тем, эти положения не являются ограничительными. Действительно, изобретение позволяет корректировать измерения давления воздуха или любого газового потока, циркулирующего в турбореактивном двигателе, в других местах турбореактивного двигателя: например на входе турбореактивного двигателя, на входе компрессора высокого давления, на выходе вентилятора, на выходе турбины низкого давления и т.д.
Кроме того, изобретение можно применять для других типов двигателей самолетов и, в целом, летательных аппаратов и, в частности, для других турбомашин (например, для турбовинтового двигателя).
В данном случае датчик 4 является известным специалисту пьезорезисторным датчиком давления с тензометрами, установленными в виде моста Уитстона. Предполагается, что неточность датчика 4 в основном связана с наличием погрешности смещения нуля.
Как известно, самолет 3 оборудован также различными датчиками, предназначенными для измерения рабочих параметров самолета и турбореактивного двигателя 2, в частности, таких как атмосферное давление Р0. Эти датчики расположены снаружи турбореактивного двигателя. Они известны своей точностью и своей стабильностью во времени (полное или почти полное отсутствие смещения нуля).
Так, в частности, самолет 3 оборудован известным специалисту кварцевым датчиком 5 давления, находящимся, например, на уровне кабины экипажа. Разумеется, можно предусмотреть и другие места установки датчика 5.
Этот датчик 5 характеризуется точностью измерения, превышающей точность датчика 4, как правило, порядка одного миллибара или нескольких гектопаскалей (гПа).
В рассматриваемом примере высокая точность датчика 5 связана также с тем, что атмосферное давление Р0, измеряемое датчиком 5 давления, находится в пределах диапазона значений, входящего в диапазон значений давления PS3, измеряемого датчиком 4. Например, во время полета летательного аппарата, оборудованного турбореактивным двигателем, часто встречается коэффициент 30-40 между атмосферным давлением Р0 и давлением PS3 на выходе компрессора высокого давления турбореактивного двигателя.
В рамках изобретения датчик 5 давления является датчиком самолета. Он предназначен для выдачи самолетного измерения М2 атмосферного давления Р0 в блок FADEC самолета (на фиг.1 не показан), в частности, для обеспечения регулирования и контроля турбореактивного двигателя 2.
Следует отметить, что датчик 4, соответственно датчик 5, связан со схемой получения (на фиг.1 не показана), которая содержит, в частности, аналого-цифровой преобразователь, выполненный с возможностью выдачи измерения, поступившего от датчика 4, соответственно датчика 5, в цифровом виде. Элементы, входящие в состав схемы получения, а также принципы их работы известны специалисту, и их подробное описание опускается.
Таким образом, в рамках изобретения измерения М1 и М2, выдаваемые соответственно датчиками 4 и 5, будут обозначать цифровые выходы аналого-цифрового преобразователя схемы получения этих датчиков.
Для упрощения в дальнейшем тексте описания датчик 4, установленный в турбореактивном двигателе 2, будет обозначен термином «моторный датчик 4», и датчик 5 самолета будет обозначен термином «самолетный датчик 5».
Следует отметить, что изобретение можно применять и для других типов датчиков, отличных от рассматриваемых в данном примере. Вместо моторных датчиков можно использовать дешевые датчики даже с большей погрешностью смещения нуля, и вместо самолетных датчиков 5 можно использовать другие датчики с хорошими показателями с точки зрения точности и стабильности их характеристик во времени. Например, в варианте датчики 4 и 5 могут быть датчиками с вибрирующими цилиндрами.
В описанном варианте выполнения устройство 1 коррекции включено в блок FADEC и имеет материальную архитектуру компьютера.
В частности, в его состав входят процессор 10, постоянная память 11, оперативная память 12, энергонезависимая память 13, а также средства 14 связи с моторным датчиком 4 и с самолетным датчиком 5.
Эти средства связи представляют собой, в частности, известные цифровые шины данных.
Постоянная память 11 представляет собой носитель записи, читаемый процессором 10 устройства коррекции, на котором записана компьютерная программа S, содержащая команды для исполнения этапов способа коррекции в соответствии с изобретением, показанных на описанных ниже фиг.3А и 3В.
Как было указано выше, согласно изобретению, коррекцию текущих измерений М1, выдаваемых датчиком 4 в ходе полета, производят при помощи оценочного значения погрешности смещения нуля этого датчика.
Фиг.2 схематично иллюстрирует погрешность смещения нуля датчика 4.
На этой фигуре кривая CRef представляет собой контрольную кривую, для которой измерение давления V1Ref(PS3), выдаваемое датчиком 4, равно реальному давлению PS3 воздуха на выходе компрессора высокого давления турбореактивного двигателя 2. Иначе говоря, кривая CRef показывает измерение давления, которое мог бы выдавать датчик 4, если бы он не имел никаких дефектов, в частности погрешности смещения нуля.
Что касается кривой С, то она показывает измерение давления M1(PS3), реально выдаваемое датчиком 4 в зависимости от давления PS3.
В рассматриваемом примере отмечается, что кривые CRef и С являются параллельными. В частности, для каждого значения давления PS3 на выходе компрессора высокого давления проверяют следующее отношение:
M1(PS3)=M1Ref(PS3)+ε,
где ε является реальным числом, отражающим погрешность смещения нуля датчика 4.
Для упрощения на фиг.2 не показаны другие факторы неточности, которые могут влиять на измерение давления, выдаваемое датчиком 4, например такие как погрешности калибровки, гистерезис по давлению и/или по температуре и окружающая среда датчика 4. Таким образом, погрешность смещения нуля ε известна этим факторам неточности.
Погрешность смещения нуля ε не зависит от измеряемого давления PS3. В примере, представленном на фиг.2, оно является положительным. Однако погрешность смещения нуля прибора может быть также отрицательной.
Согласно изобретению, для оценки этой погрешности смещения нуля используют два измерения, обозначаемых соответственно M1Cal(PS3) и М2(Р0) и осуществляемых моторным датчиком 4 и самолетным датчиком 5, в приоритетные моменты, отражающие конкретные точки работы турбореактивного двигателя 2 и самолета 3.
Эти конкретные рабочие точки соответствуют условиям, при которых на моторный датчик 4 и на самолетный датчик 5 действует одинаковое окружающее атмосферное давление Р0, с учетом разности высоты установки между датчиками.
В таких условиях при отсутствии погрешности смещения нуля моторный датчик 4 должен выдавать измерение давления PS3, идентичное или почти идентичное измерению атмосферного давления Р0, выдаваемому самолетным датчиком 5 и считающемуся очень точным и, по существу, равным M1Ref(PS3). Действительно, поскольку самолетный датчик является более точным и стабильным, чем моторный датчик, то считается, что его погрешность смещения нуля является ничтожной.
Следует отметить, что предположение, согласно которому на фиг.2 можно пренебречь другими факторами неточности, которые могут влиять на измерение давления, выдаваемое датчиком 4, несущественно влияет на коррекцию, производимую в рамках изобретения. Действительно, как было упомянуто выше, изобретением предлагается сосредоточить внимание вокруг конкретных рабочих точек турбореактивного двигателя 2 и самолета 3, для которых влияние этих факторов на самолетные измерения и на моторные измерения считается подобным, или, по крайней мере, для которых разница между этими факторами сводится к минимуму при самолетных измерениях и моторных измерениях.
Однако, поскольку датчик 4 имеет погрешность смещения нуля ε, он выдает измерение M1Cal(PS3), при котором:
M1Cal(PS3)=М2(Р0)+ε
Иначе говоря:
ε=M1Cal(PS3)-М2(Р0).
Таким образом, согласно изобретению, предпочтительно оценивают просто погрешность смещения нуля ε датчика 4 на основании измерений M1Cal(PS3) и М2(Р0).
Далее со ссылками на фиг.3А и 3В следует более подробное описание этапов способа коррекции согласно изобретению в частном варианте выполнения, в котором этот способ применяется устройством 1 коррекции, показанным на фиг.1. Предпочтительно эти этапы следуют вышеупомянутому принципу.
Осуществление способа коррекции в соответствии с изобретением опирается на две разные фазы: первую фазу φCal, называемую фазой калибровки, во время которой производят оценку погрешности смещения нуля, влияющую на датчик 4 (фиг.3А), затем вторую фазу φCorr, называемую фазой коррекции, во время которой корректируют текущие измерения, выдаваемые датчиком 4, при помощи полученной оценочной погрешности смещения нуля (фиг.3В).
Как было указано выше, для оценки погрешности смещения нуля в соответствии с изобретением необходимо, чтобы на моторный датчик 4 и на самолетный датчик 5 действовало одинаковое окружающее атмосферное давление. Только при соблюдении таких условий можно использовать измерения, выдаваемые соответственно датчиком 4 и датчиком 5, для оценки погрешности смещения нуля.
Таким образом, как показано на фиг.3А, после запуска самолета 3 (этап Е10) процессор 10 сначала определяет, соблюдаются ли вышеуказанные условия оценки погрешности смещения нуля ε (этап Е20).
Как известно, если, с одной стороны, турбореактивный двигатель 2 не работает (то есть, когда он не вращается) и, с другой стороны, самолет 3 стоит неподвижно на земле, на моторный датчик 4 и на самолетный датчик 5 действует одинаковое окружающее атмосферное давление (с учетом разности высоты между датчиками): следовательно, условия оценки погрешности смещения нуля действительны.
Эти два требования удовлетворяются, в частности, по завершении фазы инициализации блока FADEC (за которой следует подача команды на запуск самолета 3) до того, как блок FADEC направит последовательность команд управления в турбореактивный двигатель, в результате которых начинается его вращение.
Действительно, во время этой фазы инициализации блок FADEC (и, следовательно, устройство 1 коррекции, встроенное в FADEC) получает питание от электрической сети самолета 3, поскольку стартер-генератор турбореактивного двигателя пока не находится под напряжением. Следовательно, турбореактивный двигатель 2 пока не вращается и в рамках изобретения считается неработающим.
Затем в конце этой фазы инициализации устройство управления двигателем ECU (Engine Control Unit) блока FADEC направляет последовательность команд управления на контроллер стартера-генератора турбореактивного двигателя, чтобы изменить систему его возбуждения с целью его перехода в режим стартера. На стартер-генератор начинает поступать напряжение.
Затем устройство ECU подает команды на различные агрегаты турбореактивного двигателя вплоть до собственно его запуска и его приведения во вращение. После этого турбореактивный двигатель сам обеспечивает электрическое питание устройства ECU и, в целом, блока FADEC.
Таким образом, в описанном здесь варианте выполнения, в котором моторное измерение давления PS3 корректируют при помощи самолетного измерения давления Р0, условия оценки погрешности смещения нуля ε будут считаться соблюденными, как только будет отмечен конец фазы инициализации блока FADEC и перед направлением последовательности запуска на турбореактивный двигатель. В любом случае следует убедиться, что турбореактивный двигатель еще не начал вращаться.
Аналогичные требования могут приниматься во внимание, когда рассматривают другие давления, отличные от давления PS3, если только эти давления отличны от атмосферного давления Р0.
С другой стороны, если предусматривают коррекцию моторного измерения атмосферного давления при помощи самолетного измерения этого атмосферного давления, условие, согласно которому на моторный датчик и на самолетный датчик действует одинаковое атмосферное давление, можно проверить в других ситуациях, отличных от той, при которой турбореактивный двигатель не работает, и самолет стоит неподвижно на земле. Действительно, такое условие можно также проверить в ходе полета самолета.
Если процессор определяет, что условия оценки погрешности смещения нуля ε не соблюдены, способ коррекции останавливается (этап Е30).
Если же процессор определяет, что условия оценки погрешности смещения нуля ε соблюдены, он получает текущие измерения, поступающие от моторного датчика 4 и от самолетного датчика 5 (этап Е40).
Эти измерения включают в себя, с одной стороны, измерение M1Cal(PS3), называемое калибровочным измерением давления PS3 и выдаваемое моторным датчиком 4, и, с другой стороны, измерение М2(Р0) атмосферного давления Р0, поступающее от самолетного датчика 5.
Следует отметить, что в представленном варианте выполнения процессор 10 только принимает измерения, выдаваемое датчиком 4 и датчиком 5, в момент, когда он устанавливает, что условия оценки погрешности смещения нуля соблюдаются. В варианте процессор 10 может сам запускать эти измерения, как только он устанавливает, что условия оценки погрешности смещения нуля соблюдаются.
Затем на основании этих двух измерений процессор производит оценку погрешности смещения нуля ε, влияющей на датчик 4 (этап Е50) посредством вычисления разности между измерениями M1Cal(PS3) и М2(Р0):
ε=M1Cal(PS3)-М2(Р0).
Оцененная таким образом погрешность смещения нуля ε сохраняется в энергонезависимой памяти 13 устройства 1 коррекции.
В данном случае оценку погрешности смещения нуля производят непосредственно перед запуском турбореактивного двигателя 2. Однако в варианте ее можно производить и в дальнейшем, если измерения M1Cal(PS3) и М2(Р0) были получены тогда, когда на датчик 4 и на датчик 5 действовало одинаковое окружающее атмосферное давление.
Этап Е50 завершает фазу калибровки ϕCal. Эту фазу калибровки можно осуществлять при запуске перед каждым полетом самолета 3 или через более длительные промежутки времени, например, один раз в год, поскольку погрешность смещения нуля датчика меняется медленно в зависимости от времени.
Сохранение погрешности смещения нуля ε в энергонезависимой памяти 13 позволяет устройству 1 коррекции легко получать доступ к последнему оценочному значению погрешности смещения нуля, чтобы корректировать текущие измерения, выдаваемые моторным датчиком 4, во время последующих полетов самолета 3.
Как показано на фиг.3В, фаза коррекции φCorr текущих измерений датчика 4 начинается с момента запуска турбореактивного двигателя (этап F10).
Процессор 10 устройства 1 коррекции получает каждое текущее измерение M1(PS3) давления PS3, выдаваемое датчиком 4 (этап F20).
Затем он вычитает из этого измерения погрешность смещения нуля ε, извлеченное из энергонезависимой памяти 13 (этап F30), чтобы получить скорректированное значение M1Corr(PS3):
M1Corr(PS3)=M1(PS3)-ε.
Скорректированное таким образом текущее измерение M1Corr(PS3) представляет собой точное измерение давления PS3 без какой-либо погрешности смещения нуля. Таким образом, изобретение позволяет использовать недорогие моторные датчики и одновременно соблюдать действующие регламентные нормы, касающиеся точности измерений, выдаваемых этими датчиками.
Необходимо отметить, что в описанном здесь примере для коррекции измерений давления PS3 используют измерение атмосферного давления Р0. Однако это положение не является ограничительным, и можно корректировать другие измерения давления газового потока, циркулирующего в турбореактивном двигателе. В частности, изобретение позволяет также корректировать моторное измерение атмосферного давления Р0 при помощи самолетного измерения этого же атмосферного давления.
Способ в соответствии с изобретением позволяет производить коррекцию текущего измерения давления газового потока, выдаваемого в ходе полета датчиком, установленным в двигателе. Способ включает в себя: оценку (Е50) погрешности смещения нуля, влияющей на датчик, на основании разности между: калибровочным измерением давления газового потока, выдаваемым датчиком, установленным в двигателе, и измерением атмосферного давления, выдаваемым датчиком летательного аппарата, обладающим точностью измерения, превышающей точность датчика, установленного в двигателе; эти измерения производят, когда на датчик, установленный в двигателе, и на датчик летательного аппарата действует одинаковое окружающее атмосферное давление; и вычитание погрешности смещения нуля из текущего измерения. Технический результат изобретения - повышение точности измерения газового потока, циркулирующего в двигателе летательного аппарата. 5 н. и 1 з.п. ф-лы, 3 ил.
1. Способ коррекции текущего измерения (М1) давления газового потока, циркулирующего внутри двигателя (2), приводящего в движение летательный аппарат (3), причем это измерение поступает в ходе полета летательного аппарата от датчика (4), установленного в двигателе, при этом способ коррекции содержит:
- этап оценки (Е50) погрешности смещения нуля ε датчика на основании разности, существующей между:
- калибровочным измерением давления газового потока, выдаваемым датчиком (4), установленным в двигателе (2); и
- измерением атмосферного давления, выдаваемым датчиком (5) летательного аппарата (3), причем этот датчик летательного аппарата обладает точностью измерения, превышающей точность датчика, установленного в двигателе;
при этом калибровочное измерение и измерение атмосферного давления осуществляют в условиях, при которых датчик, установленный в двигателе, и датчик летательного аппарата подвергаются действию одинакового окружающего атмосферного давления; и
- этап вычитания (F30) оценочной погрешности смещения нуля из текущего измерения давления газового потока.
2. Способ коррекции измерения по п.1, в котором условия, в которых производят калибровочное измерение и измерение атмосферного давления, совпадают с остановкой двигателя (2) и удержанием летательного аппарата (3) неподвижным на земле.
3. Читаемый компьютером носитель записи, на котором записана компьютерная программа, содержащая команды для осуществления этапов способа коррекции по п.1 или 2.
4. Устройство (1) коррекции текущего измерения (М1) давления газового потока, циркулирующего внутри двигателя, приводящего в движение летательный аппарат, причем это измерение поступает в ходе полета летательного аппарата (3) от датчика (4), установленного в двигателе (2), при этом устройство содержит:
- средства для получения:
- калибровочного измерения давления газового потока, выдаваемого датчиком (4), установленным в двигателе;
- измерения атмосферного давления, выдаваемого датчиком (5) летательного аппарата, причем этот датчик летательного аппарата обладает точностью измерения, превышающей точность датчика, установленного в двигателе;
при этом калибровочное измерение и измерение атмосферного давления осуществляют в условиях, при которых датчик, установленный в двигателе, и датчик летательного аппарата подвергаются действию одинакового окружающего атмосферного давления;
- средства для оценки погрешности смещения нуля датчика, установленного в двигателе, на основании разности, существующей между калибровочным измерением и измерением атмосферного давления; и
- средства для вычитания оценочной погрешности смещения нуля из текущего измерения давления газового потока.
5. Турбомашина (2), содержащая устройство (1) по п.4.
6. Система измерения давления газового потока, циркулирующего внутри двигателя, приводящего в движение летательный аппарат (3), содержащая:
- первый датчик (4) давления газового потока, причем этот первый датчик установлен в двигателе;
- второй датчик (5) атмосферного давления, установленный в летательном аппарате снаружи двигателя и обладающий точностью измерения, превышающей точность первого датчика;
- средства включения:
- калибровочного измерения давления газового потока первым датчиком; и
- измерения атмосферного давления вторым датчиком;
в условиях, при которых первый датчик и второй датчик летательного аппарата подвергаются действию одинакового окружающего атмосферного давления; и
- устройство (1) коррекции по п.4, выполненное с возможностью коррекции текущего измерения давления, выдаваемого во время полета летательного аппарата первым датчиком, и с возможностью оценки погрешности смещения нуля первого датчика на основании разности, существующей между измерением атмосферного давления и калибровочным измерением.
| 0 |
|
SU188909A1 | |
| US4598381A,01.07.1986 | |||
| JP2009002875A,08.01.2009 | |||
| US2009222230A1,03.09.2009 | |||
| FR2886981A1,15.12.2006 | |||
| JP2006348778A,28.12.2006 | |||
| Способ градуировки измерительных преобразователей давления | 1982 |
|
SU1247700A1 |
| Способ измерения давления | 1972 |
|
SU491851A1 |
| Устройство для измерения температуры газового потока | 1980 |
|
SU887943A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ СОПЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В ПОЛЁТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2230302C1 |

