УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Изобретение относится к общей области измерений, осуществляемых с помощью датчиков параметров, таких как, например, температуры текучей среды.
Изобретение конкретнее относится к корректировке сигнала измерения, выдаваемого датчиком температуры.
Изобретение соответственно имеет предпочтительное, но неограничивающее применение в области авиации, и особенно в области систем управления для авиационных двигателей, например турбореактивных двигателей.
Как известно, чтобы регулировать и адаптировать управление реактивного двигателя к различным ограничениям полета, необходимо измерять температуру различных потоков газа, проходящих через турбореактивный двигатель (называемых температурами потоков). С этой целью используются датчики температуры, например зонды или термопары, размещенные в различных местах в канале газового потока.
Датчики температуры обычно страдают от тепловой инерции, которая специфична для каждого датчика и которая зависит, в частности, от массы или размера датчика. Эта инерция отражается в сдвиге во времени между моментом, в котором измерение осуществляется датчиком, и моментом, в который он выдает сигнал в ответ на это измерение. Это называется явлением запаздывания измерения и может вызвать неисправности турбореактивного двигателя из-за его плохой адаптации, в частности, во время быстрых изменений в температурах газовых потоков.
Чтобы ослабить эту проблему, существуют методики для корректировки сигналов измерения, выдаваемых датчиком температуры, которые компенсируют эффект запаздывания, вызванный инерцией датчика. Одна такая методика описывается, например, в патенте США №5080496.
Те методики обычно полагаются на цифровое моделирование инерции датчика с использованием фильтра с параметрами, установленными с помощью оценивания постоянной времени датчика. Как в действительности известно, постоянная времени измерительного датчика характеризует его время отклика, то есть инерцию.
Методики известного уровня техники для оценивания постоянной времени датчика температуры используют неизменные графики в зависимости от одного или нескольких параметров, например скорости потока текучей среды, в которой размещается датчик. Эти графики указывают средние значения постоянных времени для шаблонов времени отклика и заданных условий. Другими словами, они фактически не учитывают разброс инерции от одного датчика температуры к другому.
Современные технологии производства не дают возможность произвести датчики температуры для контроля турбореактивных двигателей с низкой стоимостью, и которые также соответствуют шаблону времени отклика, подверженному небольшому разбросу. Следовательно, сложно получить графики, приспособленные к различным рассматриваемым датчикам температуры. Возникают многочисленные проблемы, когда постоянные времени датчиков, установленных в турбореактивном двигателе, значительно отклоняются от значений, заданных этими графиками.
Одним решением было бы проверить каждый датчик температуры, например в аэродинамической трубе, чтобы определить его постоянную времени при предопределенных условиях, и экстраполировать графики в зависимости от постоянной времени, определенной таким образом. Однако такая проверка является очень дорогой и представляет приблизительно одну треть цены датчика температуры. Следовательно, ее нельзя использовать для каждого датчика температуры, что означает, что нельзя было бы обнаружить датчик температуры вне приемочного шаблона, для которого доступен график.
Кроме того, такие проверки часто выполняются при скоростях потока текучей среды, ограниченных возможностями аэродинамической трубы, и обычно не способны охватить диапазон рабочих скоростей потока в применениях с турбореактивным двигателем. Экстраполяция графиков для охвата всего диапазона рабочих скоростей потока вносит погрешности в систему сбора данных датчика температуры.
Кроме того, как упоминалось выше, постоянная времени датчика температуры зависит от таких параметров, как скорость потока текучей среды, в которой размещается датчик. Это означает, что для того, чтобы оценить постоянную времени датчика температуры, необходимо сначала оценить эту скорость потока рабочей среды. Следовательно, необходимо использовать дополнительные оценочные модули на турбореактивном двигателе, что делает корректировку измерений еще более сложной.
Следовательно, существует потребность в простом способе корректировки сигналов измерения, выдаваемых датчиком температуры, который позволяет высококачественную компенсацию эффекта запаздывания, вносимого датчиком, независимо от постоянной времени датчика.
ЦЕЛЬ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение решает эту потребность путем предоставления способа корректировки сигнала измерения температуры, выдаваемого датчиком, при этом упомянутый способ включает в себя:
- этап цифрового моделирования температуры, измеренной датчиком, с использованием моделированного сигнала;
- этап оценивания сигнала ошибки запаздывания для упомянутого датчика на основании моделированного сигнала и сигнала, который получают путем фильтрации моделированного сигнала, причем фильтр в качестве параметра имеет оценку постоянной времени датчика; и
- этап корректировки сигнала измерения, который выдается датчиком, посредством оцененного сигнала ошибки запаздывания.
В соответствии с изобретением, постоянная времени датчика оценивается в зависимости от времени на основании сигнала измерения и моделированного сигнала.
Таким образом, изобретение позволяет оценивать в реальном масштабе времени постоянную времени рассматриваемого датчика температуры и соответственно корректировать сигналы измерения, выдаваемые этим датчиком. Корректировка, применяемая к сигналам измерения (то есть компенсация эффекта запаздывания), является адаптированной соответственно к используемому датчику температуры, какой бы ни была его инерция.
Таким образом, изобретение обладает преимуществом разрешения использовать датчики температуры с постоянными времени с большим разбросом. Уменьшение потребности в низком разбросе постоянных времени относительно заданного шаблона отражается на сокращении затрат производства датчиков температуры.
Кроме того, можно рассмотреть датчики температуры, имеющие большие постоянные времени. Это позволяет производить более надежные датчики температуры, особенно путем увеличения количества материала вокруг чувствительных элементов этих датчиков.
Кроме того, в области авиации отпадает необходимость в определении постоянной времени датчиков температуры в аэродинамической трубе, таким образом сокращаются затраты на получение одобрения типа для этих датчиков для контроля турбореактивных двигателей.
Изобретение обладает дополнительным преимуществом, не требуя использования никакого дополнительного оценочного модуля для оценивания скорости потока текучей среды, в которой размещается датчик. Постоянная времени датчика оценивается адаптивным способом на основании сигналов, традиционно оцениваемых для учета эффекта запаздывания в измерениях температуры, осуществляемых датчиком, а именно сигнала измерения, выдаваемого датчиком, и моделированного сигнала, представляющего измеренную датчиком температуру.
В одной конкретной реализации изобретения для того, чтобы оценить постоянную времени датчика, выполняют следующие этапы:
(a) получение первого и второго сигналов, соответственно путем дифференцирования сигнала измерения и моделированного сигнала;
(b) оценивание разности между абсолютным значением первого сигнала и абсолютным значением второго сигнала; и
(с) оценивание постоянной времени датчика на основании этой разности.
Таким образом, возможно обойти недостатки цифровой модели, используемой для оценки температуры, измеренной датчиком, в показателях оценки абсолютной температуры. Так как изобретение использует производные сигнала измерения и эталонного сигнала, достаточно располагать цифровой моделью, предлагающей хорошее представление относительных смещений измеренных температур.
В одной конкретной реализации изобретения постоянная времени датчика оценивается на основании разности с использованием фильтра типа интегрального корректора, имеющего заданное усиление в качестве параметра.
Этот вид фильтра известен сам по себе и предлагает хорошую производительность в плане корректировки сигналов измерения.
В качестве альтернативы могут использоваться другие оценочные модули, например оценочные модули, использующие фильтры высокого порядка.
В соответствии с одной особенностью изобретения, перед этапом (с) оценивания постоянной времени абсолютное значение первого сигнала сравнивают с заданной пороговой величиной.
Это сравнение позволяет обнаружить, в частности, является ли низким значение производной сигнала измерения, и не оценивать значение постоянной времени на основании разности, если необходимо.
Низкое значение для производной сигнала измерения указывает термостабильную фазу, во время которой постоянная времени меняется очень мало, если вообще меняется. С точки зрения аппаратной реализации нельзя получить полностью нулевую разность из-за наличия помех при измерении, присущих измерительному датчику и связанной с ним системе сбора данных. Следовательно, оценка постоянной времени может отклоняться, особенно если она реализуется с использованием фильтра типа интегрального корректора.
В соответствии с другой особенностью изобретения, после этапа (с) оценивания постоянной времени проверяют, что оцененная постоянная времени находится между предопределенным минимальным значением и предопределенным максимальным значением.
Это гарантирует, что оценка постоянной времени не отклоняется. Предопределенные значения допуска для датчика температуры, например, заданные производителем датчика, могут использоваться в качестве минимального значения и максимального значения, например.
Взаимосвязанным образом изобретение также предоставляет систему для корректировки сигнала измерения температуры, выдаваемого датчиком, причем упомянутая система включает в себя:
- средство для цифрового моделирования температуры, измеренной датчиком, с использованием моделированного сигнала;
- средство для оценивания постоянной времени датчика;
- средство для фильтрации моделированного сигнала, имеющее в качестве параметра оцененную постоянную времени датчика;
- средство для оценивания сигнала ошибки запаздывания для датчика на основании моделированного сигнала и фильтрованного сигнала; и
- средство для корректировки сигнала измерения, выдаваемого датчиком, с использованием оцененного сигнала ошибки запаздывания;
при этом упомянутая система заслуживает внимания в том, что средство для оценивания постоянной времени датчика выполнено с возможностью оценки этой постоянной времени в зависимости от времени на основании сигнала измерения и моделированного сигнала.
Как упоминалось выше, благодаря вышеупомянутым признакам и преимуществам изобретение обладает предпочтительным, но неограничивающим применением в области авиации, а конкретнее в области регулирования и контроля авиационных двигателей.
Таким образом, изобретение также предоставляет турбореактивный двигатель, включающий в себя по меньшей мере одну систему для корректировки сигнала измерения, выдаваемого датчиком температуры, в соответствии с изобретением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества настоящего изобретения возникают из нижеследующего описания, приведенного со ссылкой на прилагаемые чертежи, которые показывают неограничивающий вариант осуществления настоящего изобретения. На фигурах:
- Фиг.1 - схема, показывающая систему по данному изобретению для корректировки сигнала измерения и основные этапы способа корректировки в одной конкретной реализации изобретения;
- Фиг.2 - схема, показывающая один пример модуля цифрового моделирования, который может использоваться в системе корректировки, показанной на фиг.1, чтобы моделировать измеренную датчиком температуру;
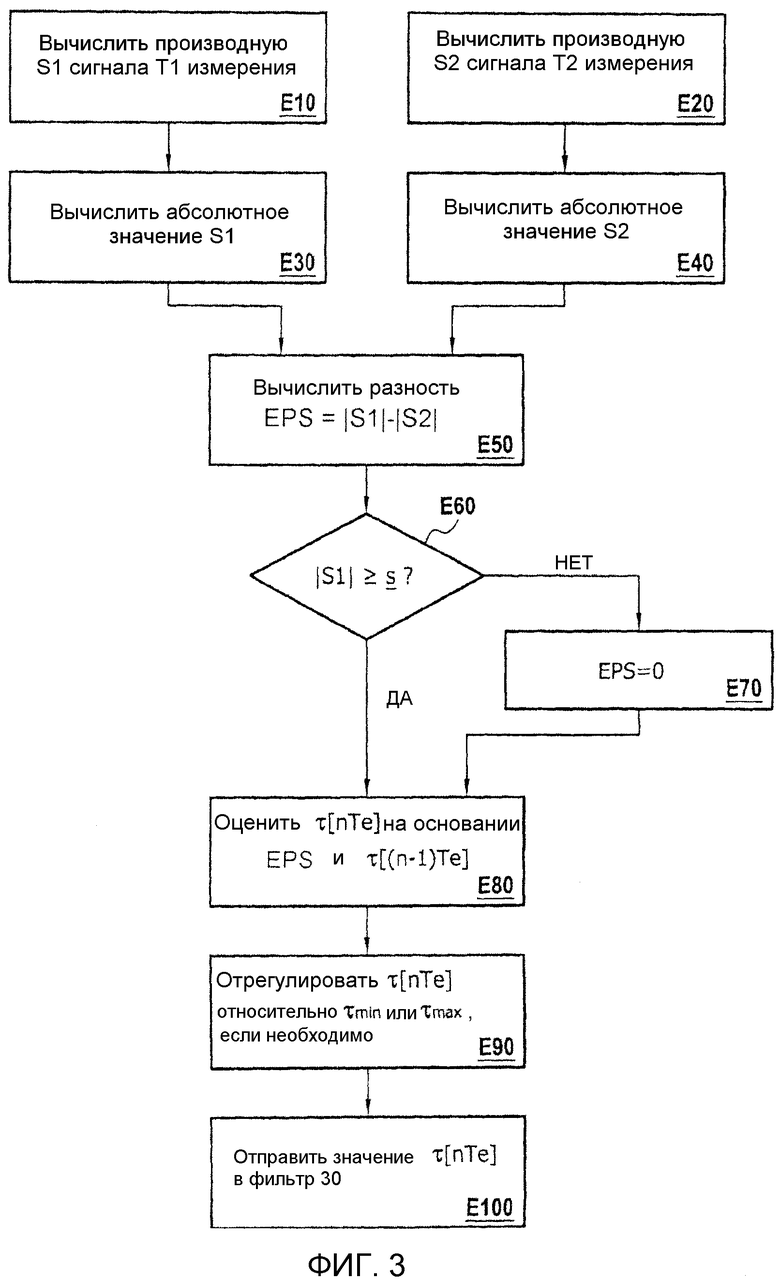
- Фиг.3 - блок-схема алгоритма, показывающая основные этапы оценивания постоянной времени датчика температуры по способу в одной конкретной реализации изобретения для корректировки сигнала измерения и который выполняется системой, показанной на фиг.1; и
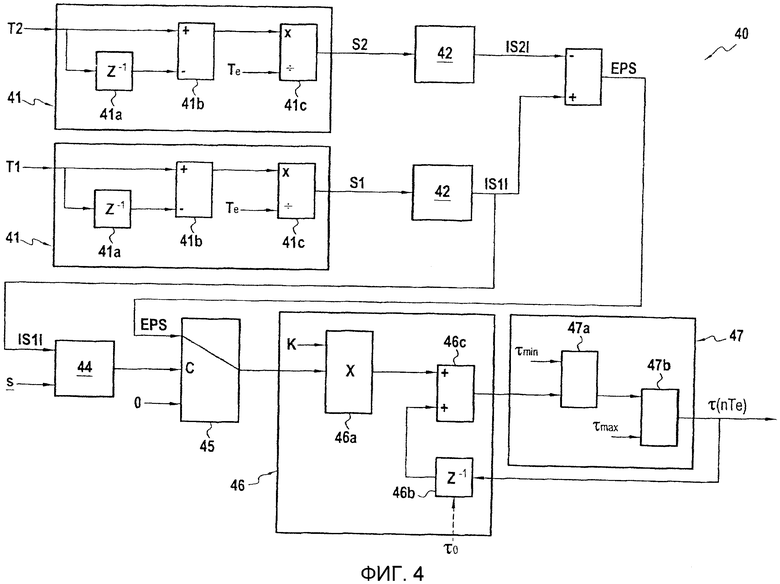
- Фиг.4 - схема, показывающая один пример средства для оценивания постоянной времени датчика в зависимости от времени путем выполнения этапов, показанных на фиг.3.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Фиг.1 представляет систему 1 и способ из одного конкретного варианта осуществления изобретения для корректировки сигнала измерения T1, выдаваемого датчиком 10 температуры, обладающим тепловой инерцией и используемым для регулирования турбореактивного двигателя самолета.
Однако это допущение не ограничивает изобретение, которое может использоваться в других применениях, где используется датчик температуры, обладающий тепловой инерцией.
Таким образом, в описанном здесь варианте осуществления вся система 1 корректировки или ее часть соединяется или встраивается в автономную цифровую систему управления двигателем (FADEC) летательного аппарата, приводимого в движение турбореактивным двигателем.
Описанный здесь пример, более конкретно, предусматривает корректировку сигнала измерения, представляющего температуру T25 на входе компрессора высокого давления в турбореактивном двигателе. Конечно, изобретение в равной степени применяется к другим температурам, которые могут измеряться в турбореактивном двигателе.
Оставшаяся часть описания рассматривает сигналы и параметры, отобранные за период дискретизации Te. Этот период дискретизации Te составляет от порядка 20 миллисекунд (мс) до 40 мс, например. Как известно, он зависит, в частности, от динамического диапазона измеренной температуры.
Однако отметим, что изобретение может в равной степени применяться с непрерывными сигналами и непрерывными параметрами.
В соответствии с изобретением, система 1 корректировки включает в себя модуль 20 цифрового моделирования, используемый для моделирования температуры T25, измеренной датчиком 10 температуры. Другими словами, модуль 20 цифрового моделирования выполнен с возможностью моделирования сигнала измерения, который выдавался бы датчиком 10 температуры, если бы тот функционировал без ошибок, связанных с его постоянной времени, или то же самое, как если бы он имел нулевую постоянную времени.
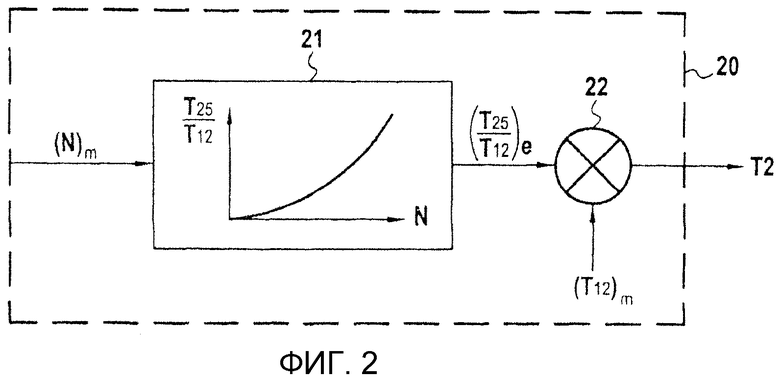
Фиг.2 - схема, представляющая один пример модуля цифрового моделирования, который может использоваться.
В этом примере модуль 20 цифрового моделирования включает в себя объект 21, приспособленный для доставки оценки отношения температур T25/T12 на основании измерения (N)m скорости вращения вентилятора турбореактивного двигателя, причем T12 - температура на входе вентилятора. Эта оценка вычисляется с помощью объекта 21, используя заданную кривую, представляющую собой изменение адиабатического отношения температур T25/T12 в зависимости от скорости вращения N вентилятора. Такая кривая известна специалисту в данной области техники и здесь не описывается более подробно.
Оценка (T25/T12)e соотношения T25/T12 затем отправляется в схему 22 умножителя, выполненную с возможностью умножения этого соотношения на измеренное значение (T12)m температуры T12. Это создает моделированный сигнал T2 на выходе схемы 22 умножителя.
Измеренное значение (T12)m температуры T12 и измеренное значение (N)m скорости вращения вентилятора получают посредством датчиков, которые известны сами по себе, помещенных в турбореактивный двигатель, и не описываются здесь более подробно.
В качестве альтернативы может применяться более сложная и более точная цифровая модель температуры, измеренной датчиком. Одна такая модель описывается, в частности, в патенте США №5 080 496.
Отметим, что в описанном здесь примере то, что необходимо корректировать, является сигналом проведенного измерения температуры T25. Однако, как упоминалось выше, изобретение применяется к другим температурам, которые могут измеряться в турбореактивном двигателе, если доступна модель изменения температуры.
Сигнал T2, который смоделирован вышеописанным образом с помощью модуля 20, затем фильтруют модулем 30, моделирующим инерцию датчика температуры. Этот модуль 30 является, например, фильтром первого порядка, имеющим передаточную функцию H10(p), которая задается следующим уравнением, в котором τ является параметром, представляющим постоянную времени датчика 10, оцененную оценочным модулем 40, подробно описанным ниже со ссылкой на фиг.3 и 4:
Затем модуль 50 вычислителя оценивает сигнал ошибки запаздывания εlag, внесенной датчиком 10 температуры, путем вычисления разностного сигнала между моделированным сигналом T2 и фильтрованным моделированным сигналом T3.
Ошибка запаздывания εlag затем добавляется к сигналу T1 измерения, выдаваемому датчиком 10, с помощью модуля 60 коррекции. Это дает скорректированный сигнал T4 измерения, в котором компенсирован эффект запаздывания, внесенный датчиком 10 температуры.
Основные этапы способа и средство реализации, используемые оценочным модулем 40 для оценки постоянной времени τ датчика температуры в зависимости от времени, описываются ниже со ссылкой на фиг.3 и 4.
В описанном здесь варианте осуществления оценочный модуль 40 применяет адаптивный алгоритм для оценки постоянной времени τ в реальном масштабе времени. Точнее говоря, постоянная времени τ оценивается в заданный момент t=nTe (где n - целое число) на основании значения этой постоянной времени, оцененного в более раннее время.
В соответствии с изобретением, сигнал T1 измерения и моделированный сигнал T2 используются для оценки постоянной времени τ датчика 10. Точнее говоря, в описанном здесь варианте осуществления первый сигнал S1 оценивается путем дифференцирования сигнала T1 измерения (этап E10), а второй сигнал S2 оценивается путем дифференцирования моделированного сигнала T2 (этап E20).
Производная S1 сигнала измерения получается с использованием первого дифференцирующего модуля 41. Это, например, фильтр первого порядка, выполненный с возможностью оценки сигнала S1 в момент t=nTe на основании следующего уравнения, в котором S1[nTe] и T1[nTe] представляют сигналы S1 и T1 соответственно, которые отобраны в момент nTe:

С этой целью, как известно, дифференцирующий модуль 41 включает в себя:
- элемент задержки 41а, выдающий сигнал измерения в более ранний момент (n-1)Te;
- вычитающий элемент 41b для вычитания из сигнала измерения T1[nTe] задержанного сигнала измерения T1[(n-1)Te]; и
- делительный элемент 41 с, выполненный с возможностью деления суммы, полученной таким образом, на период дискретизации Te.
В качестве альтернативы дифференцирующий модуль 41 может быть фильтром высокого порядка.
Сигнал S2 получается аналогичным образом из моделированного сигнала Т2 с использованием второго дифференцирующего модуля 41, выполненного с возможностью оценки сигнала S2 в момент nTe на основании следующего уравнения, в котором S2[nTe] и T2[nTe] представляют сигналы S2 и T2 соответственно, которые отобраны в момент nTe:

Абсолютное значение |S1[nTe]| сигнала S1 (этап Е30) и абсолютное значение |S2[nTe]| сигнала S2 (этап Е40) затем оцениваются с использованием подходящего модуля 42 вычисления, известного специалисту в данной области техники и не описанного здесь подробно.
Разностный сигнал EPS затем вычисляется с помощью модуля 43 вычитания на основании сигналов |S1[nTe]| и |S2[nTe]| (этап E50), например, с использованием следующего уравнения:

В описанном здесь варианте осуществления сигнал |S1[nTe]|, полученный из производной сигнала Т1 измерения, сравнивается с предопределенной пороговой величиной s, используя компаратор 44 (этап E60). Это сравнение предназначено для обнаружения низкого значения сигнала S1, представляющего стадию температурной стабильности. Для обеспечения этого выбирается предопределенная пороговая величина s.
Из-за помех при измерении, присущих системе сбора данных датчика 10 температуры, сложно, если не невозможно, получить нулевое значение EPS во время любой такой стадии температурной стабильности. Это может заставить отклоняться адаптивный алгоритм. Следовательно, чтобы смягчить эту проблему, здесь преимущественно предложено принудительно устанавливать значение разности EPS в ноль, если абсолютное значение первого сигнала S1 ниже конкретной пороговой величины s (этап E70).
Эта операция осуществляется модулем 45 действия, которое определяется выходом компаратора 44, например:
- выход модуля 45 обращается в EPS, если |S1[nTe]|≥s;
- иначе выход модуля 45 обращается в 0.
Отметим, что в описанном здесь варианте осуществления сравнение E60 осуществляется после оценивания разности EPS. В качестве альтернативы оно может осуществляться перед оцениванием разности EPS, поскольку оценка сигнала S2 может быть поставлена в зависимость от результата сравнения.
Выход модуля 45 затем отправляется в оценочный модуль 46, выполненный с возможностью оценки параметра τ в момент nTe в зависимости от разности EPS и ранее оцененного значения параметра τ. Оценочный модуль 46 принадлежит, например, к типу интегрального корректора (фильтр с интегральным корректором) с параметром усиления K (K - вещественное число), известным специалисту в данной области техники, и выполняет следующую операцию (этап Е80), где τ[nTe] является значением постоянной τ в момент nTe:

Другими словами, если во время этапа Е60 обнаруживается, что |S1[nTe]|<s, то принудительное выставление значения разности EPS в ноль во время этапа Е70 означает фактически приостановление оценки постоянной времени τ, принимая в качестве значения постоянной времени τ в момент nTe значение постоянной времени τ, оцененное в момент (n-1)Te. Это предотвращает отклонение адаптивного алгоритма.
Как известно, оценочный модуль 46 типа интегрального корректора включает в себя элемент 46а умножителя, умножающий разностный сигнал EPS на усиление K, элемент 46b задержки, выдающий значение τ[(n-1)Te], и суммирующий элемент 46 с, вычисляющий значение τ[nTe] из вышеприведенного уравнения.
Отметим что, как само по себе известно, выбранное начальное значение постоянной времени τ0, период дискретизации Te и значение усиления K являются результатом компромисса между производительностью оценки и быстротой сходимости адаптивного алгоритма. Например, начальное значение постоянной времени τ0 может выбираться из графика, предоставленного производителем датчика 10 температуры и который используется в методиках известного уровня техники.
В качестве альтернативы могут использоваться оценочные модули типов, отличных от типа интегрального корректора, например оценочные модули, использующие фильтры высокого порядка.
В описанном здесь варианте осуществления постоянная времени τ[nTe], оцененная оценочным модулем 46 типа интегрального корректора, затем отправляется в модуль 47 для удостоверения в том, что значение постоянной находится между заданным минимальным значением τmin и заданным максимальным значением τmax, и регулирования этого значения в случае отклонения относительно минимального и максимального значений.
С этой целью модуль 47 регулирования включает в себя первый модуль 47а, который принудительно выставляет значение постоянной времени τ[nTe] в τmin, если τ[nTe]<τmin, и второй модуль 47b, который принудительно выставляет значение постоянной времени τ[nTe] в τmax, если τ[nTe]>τmax (этап Е90). Минимальное и максимальное значения выбираются заранее, например, в зависимости от минимального и максимального допусков датчика температуры, указанных производителем датчика.
Постоянная времени, при необходимости скорректированная постоянная времени, затем отправляется в фильтр 30 (этап Е100), чтобы использоваться для формирования фильтрованного сигнала Т3.
Изобретение относится к области авиации и может быть использовано для корректировки температурных параметров в турбореактивном двигателе летательного аппарата. Заявленный способ включает в себя этап цифрового моделирования температуры, измеренной датчиком (10), с использованием моделированного сигнала (Т2), этап оценивания сигнала ошибки запаздывания (elag) для упомянутого датчика на основании моделированного сигнала (Т2) и сигнала (Т3), полученного путем фильтрации моделированного сигнала, и этап корректировки сигнала (Т1) измерения, выдаваемого датчиком (10), посредством оцененного сигнала ошибки запаздывания. Фильтр в качестве параметра имеет оценку постоянной времени (τ) датчика. Постоянная времени датчика оценивается в зависимости от времени из сигнала (Т1) измерения и моделированного сигнала (Т2). Технический результат: повышение точности корректировки температуры потока в турбореактивном двигателе летательного аппарата. 3 н. и 4 з.п. ф-лы, 4 ил.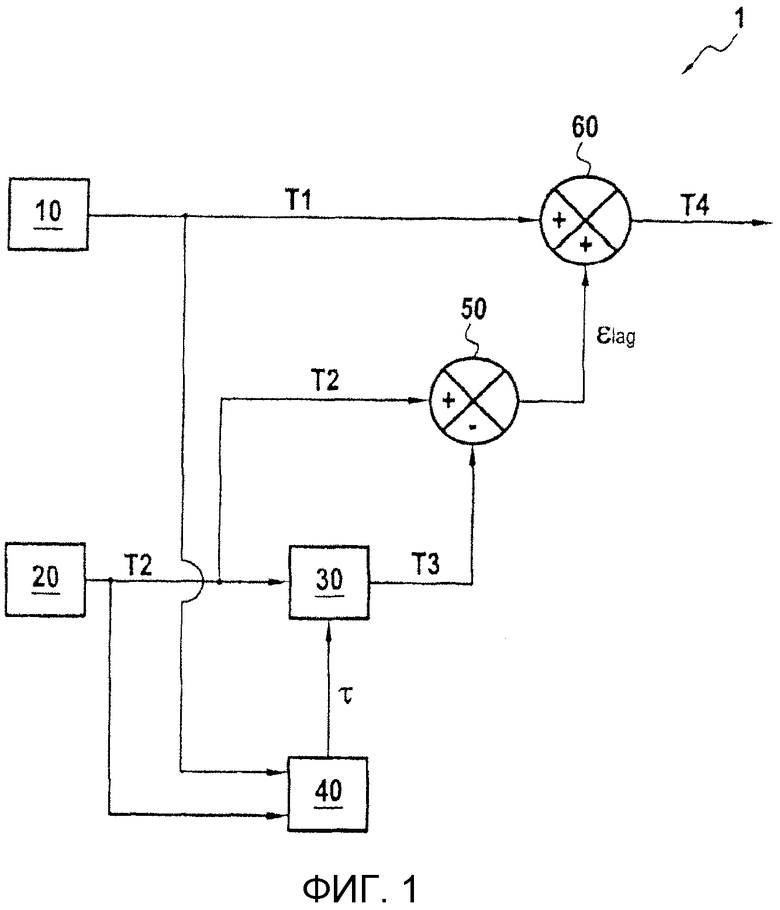
1. Способ корректировки сигнала (Т1) измерения температуры, выдаваемого датчиком (10), причем упомянутый способ включает в себя этап, па котором в цифровой форме моделируют температуру, измеренную датчиком (10), с использованием моделированного сигнала (Т2), этап, на котором оценивают сигнал ошибки запаздывания (еlag) для упомянутого датчика на основании моделированного сигнала (Т2) и сигнала (Т3), полученного путем фильтрации моделированного сигнала, причем фильтр в качестве параметра имеет оценку постоянной времени (τ) датчика, и этап, на котором корректируют сигнал (Т1) измерения, выдаваемый датчиком (10), посредством оцененного сигнала ошибки запаздывания, причем упомянутый способ отличается тем, что постоянную времени датчика оценивают к зависимости от времени на основании сигнала (Т1) измерения и моделированного сигнала (Т2).
2. Способ корректировки по п.1, отличающийся тем, что для оценки постоянной времени датчика выполняют следующие этапы, на которых:
(a) получают (E10, E20) первый и второй сигналы (S1 и S2) соответственно с помощью дифференцирования сигнала (Т1) измерения и моделированного сигнала (Т2),
(b) оценивают (E50) разность (EPS) между абсолютным значением первого сигнала и абсолютным значением второго сигнала и
(c) оценивают (E80) постоянную времени датчика на основании этой разности.
3. Способ корректировки по п.2, отличающийся тем, что постоянная времени датчика оценивается на основании разности, используя фильтр типа интегрального корректора (46), имеющий заданное усиление (К) в качестве параметра.
4. Способ корректировки по п.2, отличающийся тем, что перед этапом (с), на котором оценивают постоянную времени, абсолютное значение первого сигнала сравнивают (Е60) с заданной пороговой величиной.
5. Способ корректировки по п.2, отличающийся тем, что после этапа (с), на котором оценивают постоянную времени, проверяют (Е90), что оцененная постоянная времени находится между предопределенным минимальным значением и предопределенным максимальным значением.
6. Система (1) для корректировки сигнала измерения температуры, выдаваемого датчиком (10), причем упомянутая система включает в себя
средство (20) для цифрового моделирования температуры, измеренной датчиком (10), с использованием моделированного сигнала,
средство (40) для оценивания постоянной времени датчика (10),
средство (30) для фильтрации моделированного сигнала, имеющее в качестве параметра оцененную постоянную времени датчика,
средство (50) для оценивания сигнала ошибки запаздывания для датчика на основании моделированного сигнала и фильтрованного сигнала и
средство (60) для корректировки сигнала измерения, выдаваемого датчиком (10), с использованием оцененного сигнала ошибки запаздывания,
при этом упомянутая система отличается тем, что средство (40) для оценивания постоянной времени датчика выполнено с возможностью оценки этой постоянной времени в зависимости от времени на основании сигнала (Т1) измерения и моделированного сигнала (Т2).
7. Турбореактивный двигатель, отличающийся тем, что включает в себя по меньшей мере одну систему для корректировки сигнала измерения температуры, выдаваемого датчиком, по п.6.
| DE 102006042874 A1, 27.03.2008 | |||
| US 5080496 A, 14.01.1992 | |||
| Эпоксидная композиция | 1983 |
|
SU1183508A1 |
| GB 1316498 A, 09.05.1973 | |||
| EP 1445464 A1, 11.08.2004 | |||
| US 6564109 B1, 13.05.2003 | |||
| Устройство для валки леса | 1933 |
|
SU37415A1 |

