Область применения изобретения
Настоящее изобретение относится к обновлению прогнозирующих моделей, связанных с газотурбинным двигателем.
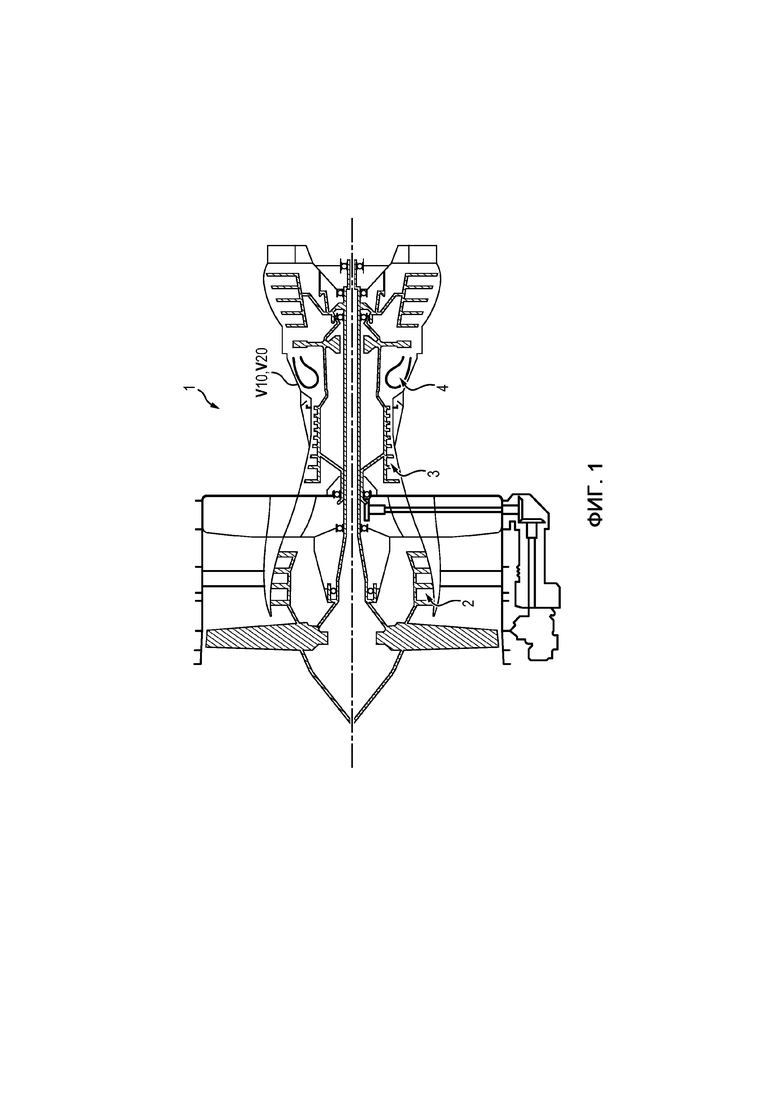
Во вступительных замечаниях приведены несколько определений. Как показано на фиг. 1, рассмотрен газотурбинный двигатель 1, содержащий два последовательных компрессора 2, 3 (компрессор 2 низкого давления и компрессор 3 высокого давления), за которыми следует камера 4 сгорания. Эти определения применимы для всей заявки.
Ps3 является статическим давлением, измеряемым или вычисляемым в плоскости на входе камеры сгорания.
Xn12R является режимом (скоростью вращения вала) компрессора 2 низкого давления, сокращенным на температуру Т12 указанного компрессора (чтобы не учитывать изменения температуры) и выраженным в оборотах в минуту.
PCN12R (или N1 в случае прямого привода или “direct drive” в англо-саксонской терминологии) является режимом компрессора 2 низкого давления, сокращенным на Т12 (чтобы не учитывать изменения температуры) и выраженным в процентах максимального режима низкого давления.
Xn25R является режимом (скоростью вращения вала) компрессора 3 высокого давления, сокращенным на Т25 (чтобы не учитывать изменения температуры) и выраженным в оборотах в минуту.
PCN25R (или N2) является режимом компрессора 3 высокого давления, сокращенным на Т25 (чтобы не учитывать изменения температуры) и выраженным в процентах максимального режима высокого давления.
РТ2 является полным внешним давлением (обеспечиваемым самолетом).
Р25 является моделируемым статическим давлением в компрессоре высокого давления.
Модель представляет собой математическое правило, описывающее изменение физической величины (параметра) в виде функции от одной или нескольких физических переменных.
Уровень техники
Во время эксплуатации газотурбинных двигателей часто происходят ложные обнаружения помпажа (срыв потока с лопаток одного из двух компрессоров) в фазе крейсерского полета. Эти явления оказывают сильное вредное воздействие на эксплуатацию (требуется эндоскопия двигателя) и являются опасными.
В этих двух случаях в момент, когда происходят эти события, наблюдалось отклонение между двумя каналами Ps3, то есть между двумя каналами получения статического давления на входе камеры сгорания.
Ложные обнаружения помпажа имеют серьезное вредное влияние на эксплуатацию в том смысле, что самолет выводится из эксплуатации, пока не будет произведена эндоскопия двигателя, чтобы проверить, нет ли в нем повреждений.
Иногда линия получения Ps3 образована трубопроводом, который получает давление на входе камеры 4 сгорания, и двумя датчиками давления, расположенными непосредственно в вычислительном устройстве самолета (FADEC от full authority digital engine control - автономной цифровой системе управления двигателем).
Измерение Ps3 осуществляется при помощи двух независимых датчиков. Для объединения данных, поступающих от двух датчиков, применяют логическую схему выбора между двумя датчиками. В данном случае предполагается, что датчики получают достоверные результаты измерений (отсутствие электрической неисправности и результат измерения находится в диапазоне физически правдоподобных результатов измерений) и что два датчика получают результаты измерений, которые отклоняются один от другого. Эта конфигурация приводит к так называемой погрешности отклонения, и в данном состоянии невозможно предпочесть одно или другое из измерений, не зная, какое из них является наиболее близким к реальному значению Ps3.
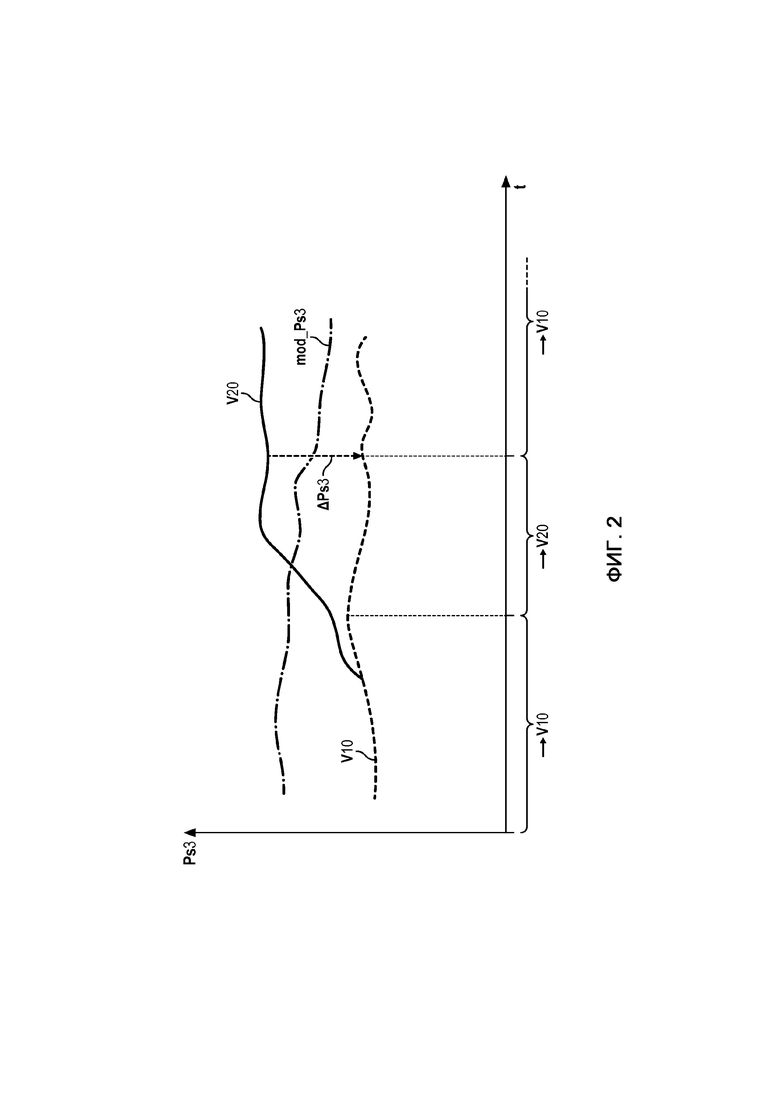
Для решения этой проблемы рассчитывают модель Ps3, основанную на законах термодинамики. Эта модель позволяет теоретически снять сомнения за счет получения третьей величины (аналитическая избыточность), независимой от измерений Ps3, которая позволит выбрать одно или другое из показаний через логику выбора. Этот принцип проиллюстрирован на фиг. 2, где показаны два канала V10, V20 приема данных, модель mod_Ps3 и переключение, которое происходит, когда канал V10 опять оказывается ближе к модели mod_Ps3, чем канал V20, который ранее разошелся с каналом V10. Переключение приводит к наблюдению вычислительным устройством значительного изменения давления ΔPs3.
Однако на практике наблюдают значения модели, довольно удаленные от реального значения Ps3. Это может привести к ошибочному выбору канала. После исследований заявитель заметил, что ложное обнаружение помпажа было связано с резким изменением выбора Ps3: поскольку два измерения Ps3 различались, выбранный канал перешел от наибольшего измерения Ps3 к наименьшему измерению за один шаг вычислений, поскольку модель первоначально была ближе к наибольшему Ps3, а затем приблизилась к наименьшему Ps3. Именно этот ложный скачок ΔPs3 по меньшей мере на 15% относительного значения может привести к ложному обнаружению помпажа, когда давление в действительности не упало.
Следовательно, существует потребность в предупреждении такого события, в частности, за счет улучшения управления выбором, в частности, что касается давления Ps3, но также для любого другого параметра.
В целом, существует потребность в лучшей обработке данных термодинамических моделей, чтобы они больше отображали реальность, как для давления Ps3, так и для других параметров.
Кроме того, можно внести различные усовершенствования в термодинамическую модель и в ее применение, чтобы улучшить быстродействие, эффективность и релевантность термодинамических моделей.
Из предшествующего уровня техники известны патентные заявки US 2014/326213A1, EP 2 434 127 A2, US 2019/080523 A1 и US 2017/218854 A1.
Раскрытие изобретения
Задачей изобретения является решение вышеупомянутых проблем.
Для этого предложен способ корректировки модели статического давления на входе камеры сгорания, называемой «моделью Ps3», в газотурбинном двигателе, содержащем компрессор, при этом модель Ps3 используют, чтобы сделать выбор между двумя каналами получения данных статического давления на входе камеры сгорания, называемого «давлением Ps3», при этом два канала получения данных используют два датчика,
в способе используют модель Ps3, сохраненную в памяти, эта модель выражает давление Ps3 в виде функции по меньшей мере от режима компрессора, называемого «режимом PCN25R», и выполняют следующие этапы:
Е1: измерение значения давления Ps3 при помощи одного из двух датчиков,
Е2: корректирование модели Ps3 с применением указанного измерения значения Ps3.
В варианте осуществления изобретения модель Ps3 является моделью по давлению компрессора, называемому «давлением Р25», указанная модель называется «моделью PS3/P25».
В варианте осуществления изобретения модель Ps3/P25 выражается в виде функции от режима компрессора, сокращенного на его температуру (называемую «температурой Т25») и называемого «режимом PCN25R» или «режимом Xn25R».
В варианте осуществления изобретения корректирование осуществляют на модели Ps3/P25 в виде функции от режима PCN25R.
В варианте осуществления изобретения компрессор является компрессором высокого давления, если газотурбинный двигатель также содержит компрессор низкого давления на входе компрессора высокого давления.
В варианте осуществления изобретения модель Ps3 определяют по сегментам в виде функции, и этап корректировки состоит в корректировке каждого сегмента.
В варианте осуществления изобретения в каждом сегменте модель PS3 является линейной.
В варианте осуществления изобретения этап корректировки по сегменту осуществляют при помощи корректора, например, интегрального корректора.
В варианте осуществления изобретения модель PS3 также выражают в виде функции от режима компрессора низкого давления, сокращенного на его температуру (называемую «температурой Т12») и называемого «режимом PCN12R».
В варианте осуществления изобретения модель PS3 выражают также в виде функции от полного внешнего давления, называемого «давлением Т2».
В варианте осуществления изобретения модель PS3 определяют по плоскости, и этап корректировки состоит в корректировке каждой плоскости.
В варианте осуществления изобретения корректируемую модель PS3 выбирают в зависимости от уровня отбора воздуха на самолете в компрессорах, и в памяти записано множество моделей PS3, выраженных в виде функции от отбора воздуха на самолете.
Предложен также способ выбора между двумя каналами получения данных, при этом указанный способ содержит следующие этапы:
- А1: выполнение описанного выше способа корректировки,
- А2: выбор канала получения данных, наиболее близкого к скорректированной модели.
Предложен также способ анализа старения газотурбинного двигателя, при этом способ включает следующие этапы:
- F1: выполнение описанного выше способа корректировки,
- F2: сохранение скорректированной модели в энергонезависимой памяти, при этом этапы F1 и F2 повторяют по меньшей мере два раза и предпочтительно больше,
- F3: сравнение различных скорректированных моделей, чтобы на их основании сделать вывод об изменении состояния газотурбинного двигателя.
Для вышеуказанной цели предложен способ корректировки модели рабочего параметра газотурбинного двигателя или летательного аппарата,
причем модель определяют в качестве правила по сегменту, указывающего значение указанного параметра в виде функции от переменной величины, или определяют в качестве правила по плоскости, указывающего значение указанного параметра в виде функции от двух переменных рабочих величин,
при этом указанное правило является аффинным по каждому сегменту или аффинным по каждой плоскости, и модель параметра сохраняют в памяти.
Рабочие параметры или переменные величины относятся, например, к температуре или к давлению, или к режиму компрессора (как правило, к режимам Xn12 и Xn25 корпуса низкого давления и корпуса высокого давления). В общем, они могут быть любым рабочим параметром, для которого имеются измерение и модель, обеспечивающие аналитическую избыточность.
Способ корректировки содержит следующие этапы:
- получение значения параметра,
- вычисление погрешности путем сравнения указанного значения параметра с соответствующим значением модели, при этом указанное значение модели принадлежит к одному из сегментов или к одной из плоскостей модели,
- применение корректора с минимизацией указанной погрешности для определения поправки,
- корректировка сегмента модели или плоскости модели с применением указанной поправки, чтобы переустановить указанный сегмент или указанную плоскость и получить, таким образом, скорректированную модель физического параметра.
В варианте осуществления изобретения этап получения значения параметра включает в себя:
- прямое измерение указанного параметра при помощи датчика, или
- измерение стороннего параметра, от которого зависит указанный параметр, или
- моделирование.
В варианте осуществления изобретения корректор является ПИД-корректором или интегральным корректором.
В варианте осуществления изобретения, когда модель является правилом по сегменту, корректировку осуществляют, фиксируя одну точку сегмента и перемещая другую точку сегмента с применением поправки, при этом обе точки предпочтительно являются концами сегмента.
В варианте осуществления изобретения, когда модель является правилом по сегменту, корректировку осуществляют, не сохраняя ни одой точки сегмента неподвижной, например, перемещая оба конца сегмента с применением поправки.
В варианте осуществления изобретения перемещение концов сегмента осуществляют в зависимости от соответствующего расстояния до указанного соответствующего значения модели.
В варианте осуществления изобретения распределение поправки, применяемой к концу сегмента, равно отношению расстояния от соответствующего значения модели до другого конца сегмента, к длине сегмента.
В варианте осуществления изобретения этап корректировки сегмента модели содержит линейную интерполяцию между двумя скорректированными точками.
В варианте осуществления изобретения, когда модель является правилом по плоскости, плоскость имеет форму прямоугольника, разбитого на треугольники, и корректировку осуществляют, фиксируя одну или две вершины треугольника и перемещая две остальные или одну оставшуюся вершину треугольника с применением поправки.
В варианте осуществления изобретения, когда модель является правилом по плоскости, плоскость разбивают на треугольники и корректировку осуществляют, перемещая три вершины треугольника.
В варианте осуществления изобретения перемещение каждой вершины треугольника осуществляют в зависимости от площади субтреугольника, образованного двумя другими вершинами и указанным соответствующим значением модели.
В варианте осуществления изобретения распределение поправки, применяемой к вершине треугольника, равно отношению площади субтреугольника, образованного другими вершинами и указанным соответствующим значением модели, к площади треугольника.
В варианте осуществления изобретения этап корректировки треугольника содержит линейную интерполяцию на основании скорректированных точек.
В варианте осуществления изобретения параметром является давление Ps3 или давление Ps3, поделенное на давление Р25, при этом:
- когда модель является правилом по сегменту, переменной является режим PCN25R, и
- когда модель является правилом по плоскости, переменными являются PCN25R и PCN12R или PCN25R и РТ2.
В варианте осуществления изобретения корректируемую модель выбирают в соответствии с переменной, при этом в памяти записано множество моделей, выраженных в виде функции от отбора воздуха на самолете, при этом переменной может быть уровень отбора воздуха на самолете в компрессорах.
В варианте осуществления изобретения коэффициенты усиления корректора являются разными для разных сегментов или плоскостей модели.
Предложен также способ анализа старения газотурбинного двигателя, при этом способ содержит следующие этапы:
- F1: выполнение описанного выше способа корректировки,
- F2: сохранение скорректированной модели в энергонезависимой памяти, при этом этапы F1 и F2 повторяют по меньшей мере два раза и предпочтительно больше,
- F3: сравнение различных скорректированных моделей, чтобы сделать вывод об изменении состояния газотурбинного двигателя.
Описание фигур чертежей
Другие признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве исключительно иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - схематичный вид газотурбинного двигателя.
Фиг. 2 иллюстрирует метод принятия решения о выборе между двумя каналами получения данных с помощью термодинамической модели.
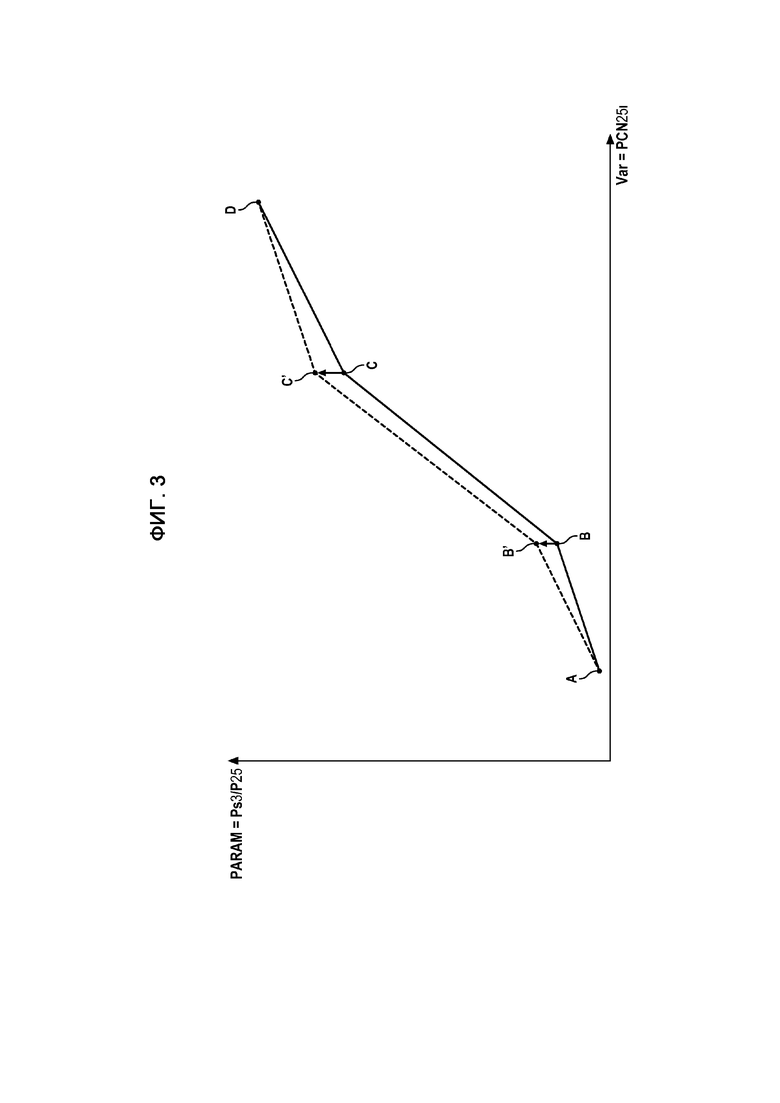
Фиг. 3 графически иллюстрирует способ корректировки давления Ps3.
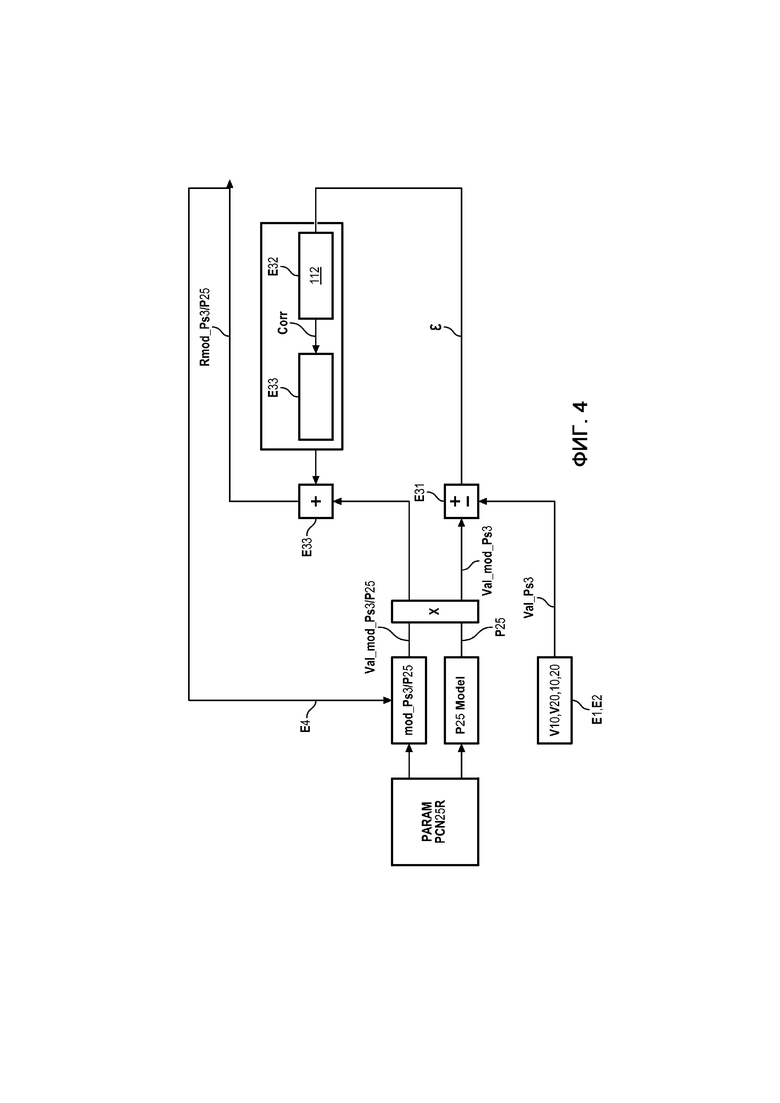
Фиг. 4 - блок-схема способа корректировки модели параметра, такого как давление Ps3.
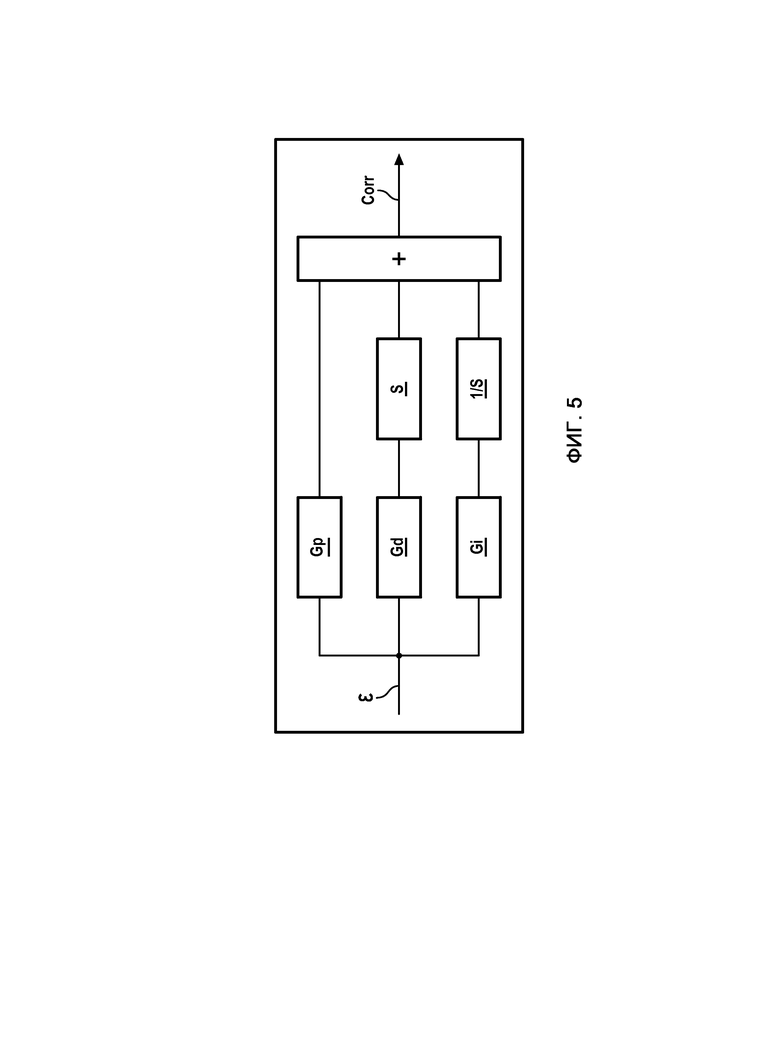
Фиг. 5 - схема корректора.
Фиг. 6а и 6b иллюстрируют способы корректировки двухмерной модели по сегменту.
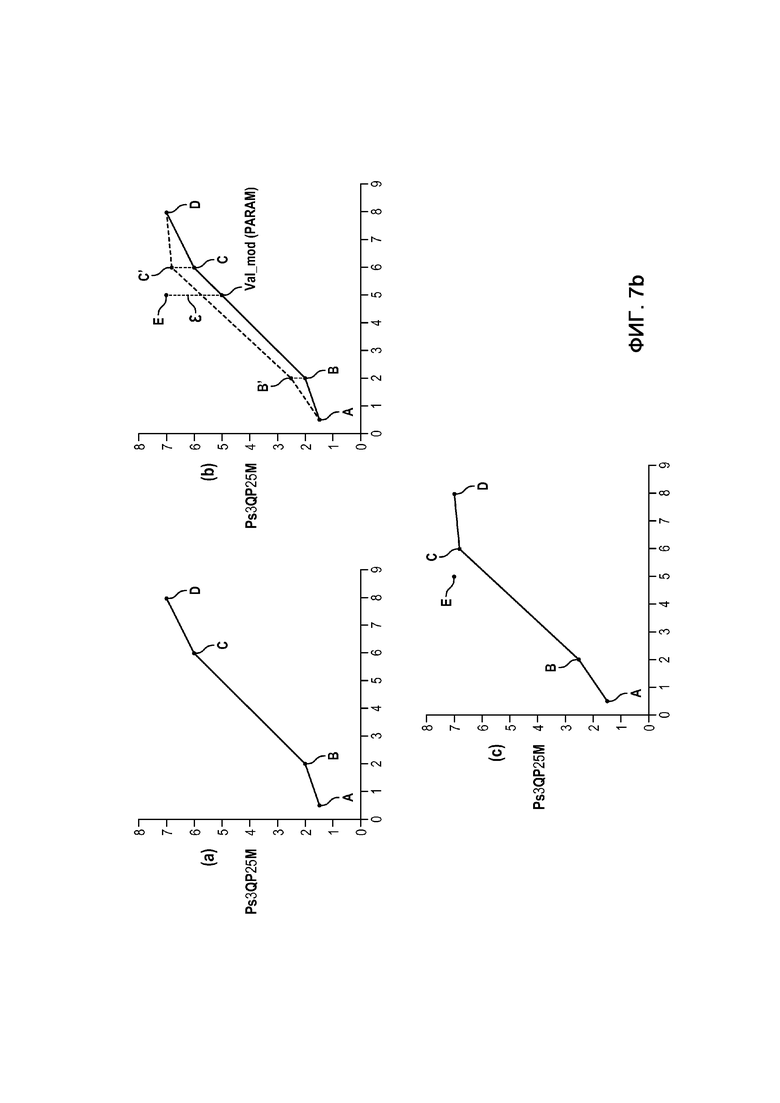
Фиг. 7а иллюстрирует способ корректировки двухмерной модели по сегменту посредством взвешивания для одного сегмента.
Фиг. 7b иллюстрирует способ корректировки двухмерной модели по сегменту посредством взвешивания для нескольких сегментов.
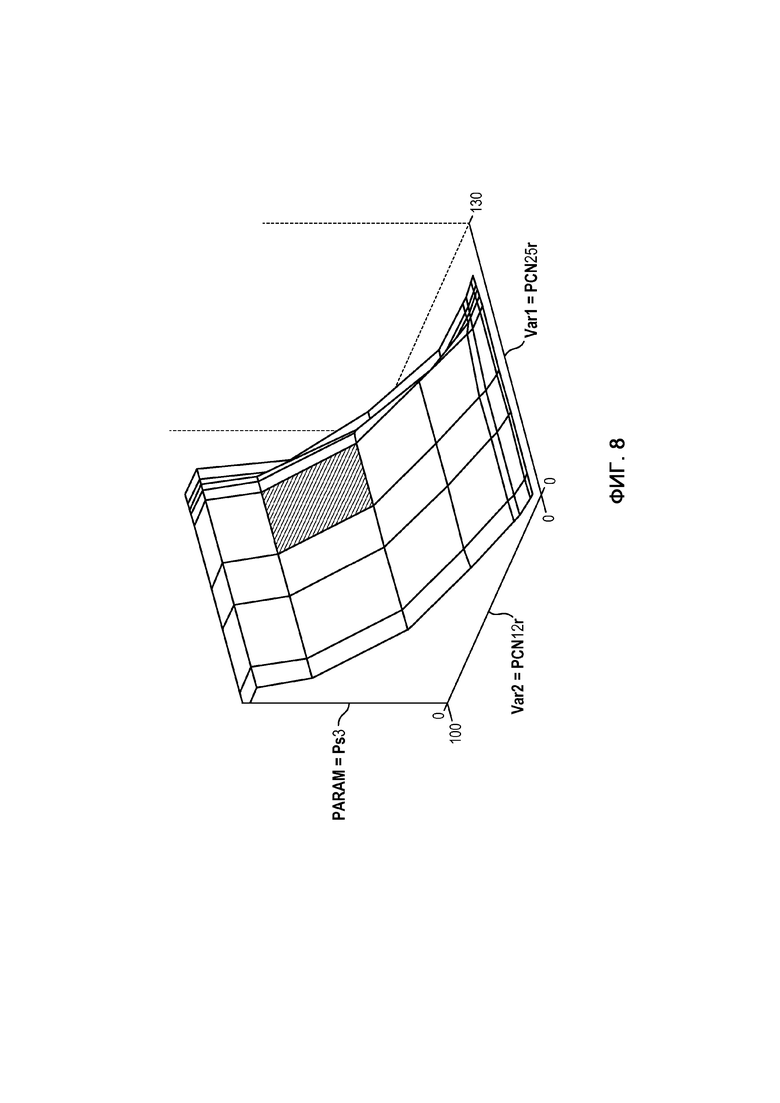
Фиг. 8 - трехмерная модель по плоскости.
Фиг. 9 - блок-схема способа корректировки трехмерной модели параметра, такого как давление Ps3, в зависимости от давлений PCN12R и PCN25R.
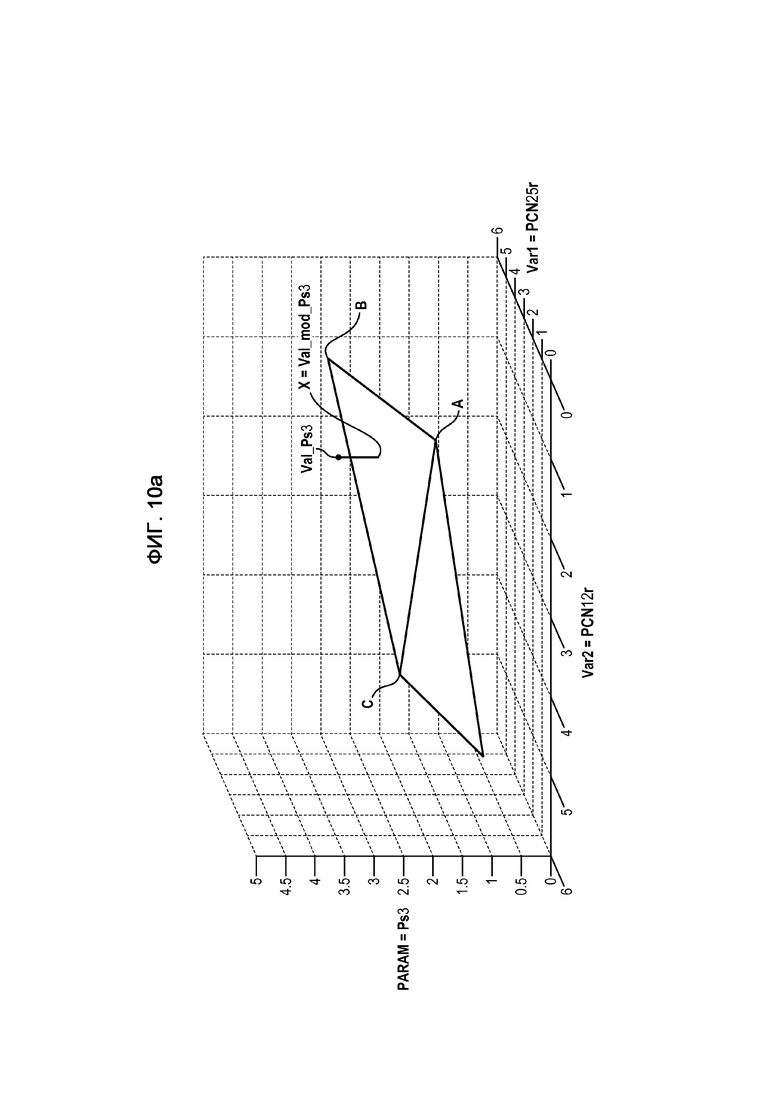
Фиг. 10а иллюстрирует для плоскости способ корректировки трехмерной модели по сегменту путем взвешивания.
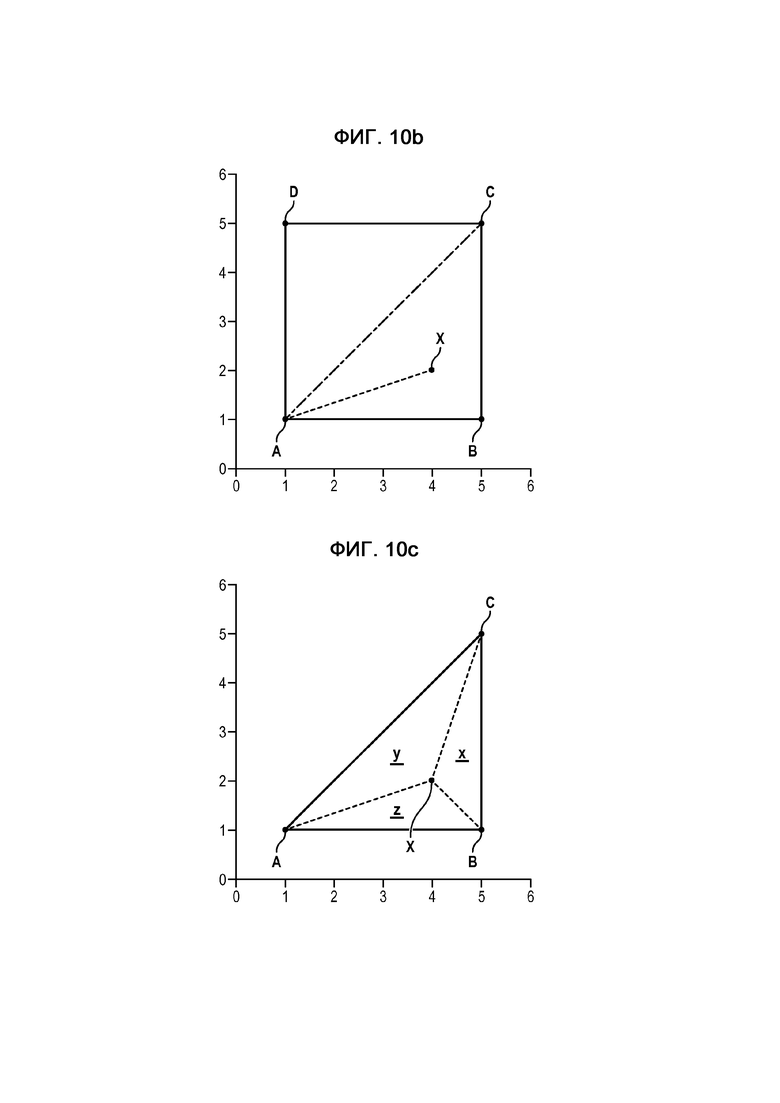
Фиг. 10b иллюстрирует выбор треугольника в прямоугольнике, образующем плоскость трехмерной модели.
Фиг. 10с иллюстрирует выбор взвешивания для треугольника в прямоугольнике, образующем плоскость трехмерной модели.
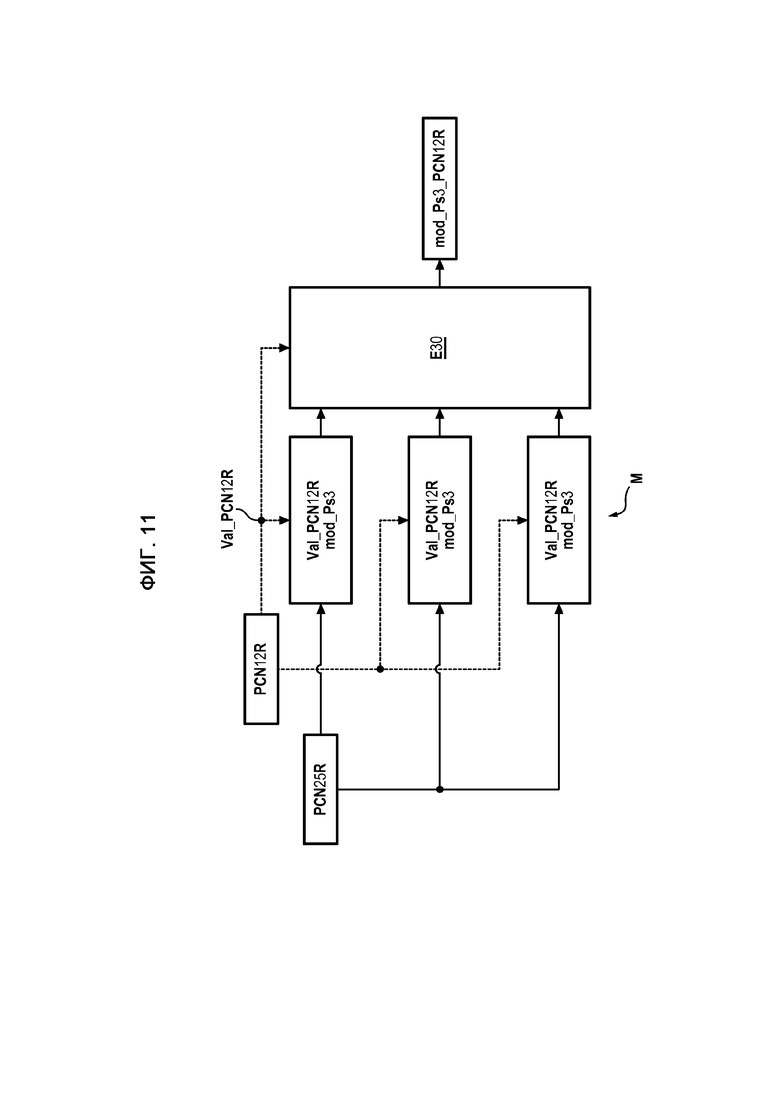
Фиг. 11 блок-схема выбора модели в зависимости от переменной до корректировки модели.
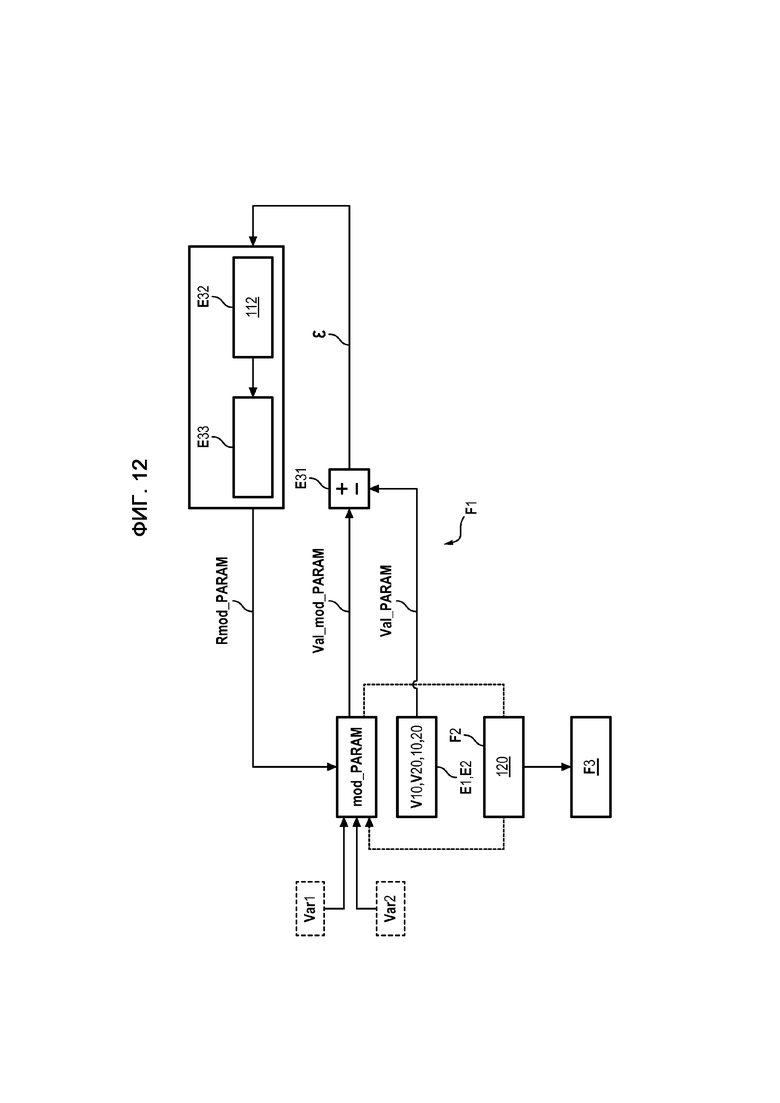
Фиг. 12 иллюстрирует способ анализа старения газотурбинного двигателя.
Подробное описание изобретения
В этом описании используются контекст и определения, приведенные во вступительной части.
Сначала будет описан способ корректировки модели статического давления перед камерой сгорания. Это давление будет называться давлением Ps3, и эта модель будет называться «моделью Ps3» и обозначаться как mod_Ps3. Речь идет о термодинамической модели.
Конечной целью модели Ps3 является, в частности, обеспечение выбора между двумя избыточными каналами V10, V20 получения данных, функциональным назначением которых является измерение давления Ps3. Каждый канал V10, V20 получения данных содержит датчик 10, 20. Датчик 10, 20 является стандартным, и его описание опускается.
Далее следует описание способа выбора между двумя каналами V10, V20 получения данных.
Предусмотрен вычислительный блок 100, который содержит процессор 110 и память 120. Вычислительный блок 100 может быть устройством FADEC («full authority digital engine control» - автономной цифровой системой управления двигателем) или отдельным компонентом, расположенным как можно ближе к каналам V10, V20 получения данных, для повышения быстроты реагирования.
В память 120 записывается модель mod_Ps3, которая позволяет получить значение давления Ps3 в функции по меньшей мере от одной переменной Var, которая является режимом PCN25R (режимом компрессора высокого давления): модель mod_Ps3 записывается в этом случае в виде mod_Ps3(PCN25R). На практике модель mod_Ps3 включает в себя несколько подмоделей, в частности, модель Ps3 по давлению компрессора высокого давления Р25 (эта модель называется mod_Ps3/Р25), и модель mod_Ps3/Р25, в свою очередь, выражается в виде функции от режима компрессора высокого давления PCN25R, сокращенного на его температуру Т25. Эта модель тогда записывается в виде mod_Ps3/Р25(PCN25R/Т25).
В этом случае, достаточно умножить значение Ps3/P25 на Р25, чтобы получить значение Ps3.
Вместо того, чтобы напрямую корректировать модель mod_Ps3, предпочтительно корректируют модель mod_Ps3/Р25. Обозначение «модели Ps3» в виде mod_Ps3 включает в себя модели, которые не выражают напрямую давление Ps3, но позволяют получить его в дальнейшем, такие как модель mod_Ps3/Р25.
На первом этапе Е1 один из двух каналов V10, V20 получения данных при помощи датчика 10, 20 измеряет значение Val_Ps3 давления Ps3 на газотурбинном двигателе (для реального значения физической величины, которую используют в качестве переменной, то есть PCN25R). На этой стадии предполагается, что оба канала V10, V20 получения данных являются исправными и что оба датчика 10, 20 дают правильное измерение. Иначе говоря, нет неисправности датчиков 10, 20 или отклонения сверх заранее определенного порога между двумя измерениями.
Затем значения Val_Ps3 этого измерения давления Ps3 передается в вычислительный блок 100.
Может быть выполнен этап Е2 преобразования или обработки данных: например, Val_Ps3 является значением статического давления Ps3, тогда как модель mod_Ps3/Р25 использует давление Ps3, сокращенное на Р25: следовательно, необходимо разделить значение статического давления Ps3 на Р25, чтобы получить значение Val_Ps3/Р25.
Затем на этапе Е3 вычислительный блок 100 корректирует модель Ps3, записанную в его памяти 120, при помощи указанного измерения значения давления Ps3. Корректировка означает, что существует по меньшей мере одна точка модели mod_Ps3 (на практике несколько и даже бесконечное множество, если модель является непрерывной), ордината которой смещена (то есть при постоянной абсциссе). Скорректированную модель обозначают Rmod_PS3/Р25. В дальнейшем запись будет упрощена до mod_PS3/Р25, что будет обозначать модель до и после корректировки.
В данном случае существует по меньшей мере одна точка Р кривой mod_Ps3(Var), значение Val_mod_Ps3(Var) которой изменилось до и после корректировки, при данном значении переменной. В предпочтительном варианте работают с mod_Ps3/Р25(PCN25R) и Val_mod_Ps3/P25(PCN25R).
Наконец, осуществляют этап Е4 сохранения скорректированной модели Ps3 в памяти 120. В варианте осуществления изобретения, скорректированная модель mod_Ps3 (в данном случае mod_Ps3/Р25) заменяет собой удаляемую из памяти 120 предыдущую модель. В другом варианте осуществления изобретения ее не удаляют.
Предпочтительно этапы Е1, Е2 и Е3 повторяют через равные интервалы, например, на каждом шаге вычисления. Шаг вычисления соответствует примерно 0,015 с. Во время шага вычисления можно осуществлять два этапа Е1 и Е3, или осуществляют этап Е1 и параллельно этап Е3 при помощи данных, полученных на этапе Е1 предыдущего шага.
Поскольку модель mod_Ps3 обновляется через равные интервалы, выбор может быть сделан быстрее и, следовательно, правильнее, избегая скачков ΔPs3, связанных с несвоевременной сменой канала V10, V20.
Предпочтительно корректировку осуществляют при помощи корректора 112, встроенного в контур цепи управления. Этот корректор будет подробно описан ниже.
Осуществляют также способ выбора между двумя каналами V10, V20 получения данных, при этом способ выбора содержит этап А1 осуществления описанного выше способа корректировки и этап А2 выбора канала V10, V20 получения данных, в ходе которого процессор выбирает один канал V10, V20 среди двух каналов V10, V20. Выбор производится согласно каналу из каналов V10, V20 получения данных, наиболее близкого к скорректированной модели. Этап А2 является традиционным, и его описание опускается.
Далее со ссылками на общую схему фиг. 4 будет описан конкретный способ корректировки модели mod_PARAM параметра газотурбинного двигателя или летательного аппарата (например, температуры, давления по абсолютной или относительной величине). При этом будет обсуждаться «интересующий параметр». Модель опять является термодинамической моделью. Модель описывает изменение параметра в функции от одной или нескольких переменных Var, которые тоже в реальности являются параметрами газотурбинного двигателя или летательного аппарата (например, температурой, давлением по абсолютной или относительной величине). Модель сохраняется в памяти 120 вычислительного блока 100.
Этот способ можно полностью применить к описанному выше способу корректировки давления Ps3. Кроме того, давление Ps3 будет также использовано в качестве примера параметра PARAM, а давление PCN25R в качестве переменной Var, но способ можно применить для любого физического параметра PARAM летательного аппарата и для любой переменной Var (например, давления РТ2): например, mod_Ps3/P25(PCN25R), mod_Ps3/P25(PCN25R, PCN12R), mod_Ps3/P25(PCN25R, PT2), mod_T25(PCN12R, PT2), mod_Xn25(PCN12R, PT2), где Mach является скоростью самолета, mod_T3(T25) и т.д.
В данном случае модель определена как правило по сегментам (в так называемой 2D-конфигурации) или по плоскости (в так называемой 3D-конфигурации), показывающим значение указанного интересующего параметра в функции соответственно от одной переменной Var (2D) или от двух переменных Var1, Var2 (3D). Правило является линейным соответственно на каждом сегменте (или, иначе говоря, кусочно-аффинным: то есть его уравнение имеет общий вид z=ax+c) или на каждой плоскости (уравнение общего вида z=ax+by+c).
Интерес в модели, определенной как правило по сегменту (2D) или по плоскости (3D), состоит в применении принципов линейной автоматики. Например, модель mod_Ps3/Р25(Xn25r) или mod_Ps3/Р25(PCN25R) является полностью нелинейной.
Рассмотрим тот же случай, что и выше, с двумя каналами V10, V20 получения данных.
На этапе Е1 получают значение Val_PARAM интересующего параметра PARAM. Это получение может происходить в рамках описанного выше этапа Е1 при помощи измерения датчиком 10, 20 одного или нескольких каналов V10, V20 получения данных, в частности, при получении стороннего параметра, и на его основании выводят указанный интересующий параметр.
Альтернативно или дополнительно интересующий параметр PARAM можно получить посредством моделирования.
Нижеследующие этапы и подэтапы выполняют при помощи процессора 110 и памяти 120 вычислительного блока 100.
Этап Е2 преобразования данных можно осуществлять, если измеряемый параметр не соответствует параметру модели: например, как было указано выше, Val_Ps3 является значением статического давления Ps3, тогда как модель mod_Ps3/Р25 использует давление Ps3, приведенное к Р25. В случае стороннего параметра указанный вычислительный блок 100 вычисляет значение интересующего параметра Val_PARAM на основании значения стороннего параметра.
После этого осуществляют этап Е3 корректировки. Этот этап Е3 корректировки включает в себя несколько подэтапов.
На подэтапе Е31 процессор 110 получает значение Val_mod_PARAM модели mod_PARAM, которое соответствует значению интересующего параметра Val_PARAM, полученному на этапе Е1.
Таким образом, значение модели Val_mod_PARAM находится на одном из сегментов или плоскостей модели mod_PARAM. Это соответствие может осуществляться через значение переменной Var модели mod_PARAM: берут значение модели Val_mod_PARAM, абсцисса которого соответствует абсциссе значения Val_PARAM интересующего параметра. Для этого по сути могут понадобиться два измерения: одно для параметра PARAM и другое для переменной Var, чтобы получить пару данных.
В случае давления Ps3 можно, таким образом, иметь измерение PCN25R одновременно с измерением Ps3.
С двумя значениями Val_mod_PARAM и Val_PARAM подэтап Е31 содержит вычисление погрешности ε, как правило, путем вычитания: ε=Val_mod_PARAM-Val_PARAM. Эта погрешность ε показана на фиг. 5.
На подэтапе Е32 эту погрешность ε обрабатывает корректор 122, роль которого заключается в минимизации указанной погрешности ε. Корректор 122 позволяет вычислить поправку corr, которая представляет собой отклонение, применяемое к координатам точек корректируемого правила, получаемого через ПИД-корректор на основании погрешности (отклонение между измерением и моделью), и которую следует ввести в модель mod_PARAM. С учетом сегментации (сегмент или плоскость) модели m_PARAM корректор применяют только на рассматриваемом сегменте или плоскости во время осуществления этапа Е3.
Конкретный корректор будет описан ниже.
Наконец, на подэтапе Е33 используют поправку corr, чтобы скорректировать сегмент или плоскость модели mod_PARAM. На этом этапе пересчитывают сегмент или плоскость на основании предыдущей модели mod_PARAM и поправки corr, вычисленной на подэтапе Е32. В частности, корректировка состоит в перемещении минимального количества точек модели mod_PARAM на подэтапе Е331 и в интерполяции остальной части модели между этими точками на подэтапе Е332: две точки для модели по сегментам и три точки для модели по плоскости.
Ниже будут описаны несколько вариантов осуществления корректировки.
Кроме того, как показано, например, на фиг. 3, можно отметить, что корректировка сегмента будет также влиять на смежные сегменты в случае, когда перемещают конец корректируемого сегмента. Дополнительно можно осуществить этап интерполяции смежных сегментов.
Выбранным корректором является ПИД-корректор (пропорционально-интегрально-дифференциальный), показанный на фиг. 5, на которой Gp, Gd и Gi обозначают соответственно коэффициент усиления пропорционального корректора, дифференциального корректора и интегрального корректора, а S является переменной в частотной области (переменная Лапласа).
Интегральный корректор (И в сокращении ПИД) позволяет ввести некоторую инерцию в зацикленную систему, что позволяет избегать сверхчувствительности к искажениям и к незадействованным точкам по сравнению с корректором «все или ничего». Интегральный корректор позволяет также регулировать скорость корректировки и избегать моментального дрейфа модели m(param) в сторону среднего значения между двумя каналами V10, V20 в случае отклонения одного из датчиков 10, 20.
Пропорциональный корректор (П в сокращении ПИД) и дифференциальный корректор (Д в сокращении ПИД) установлены для более тонкой регулировки корректора 122 в случае необходимости, но их не используют (эмпирический подход показал, что их вклад является второстепенным по сравнению с интегратором, который, естественно, намного лучше транскрибирует поведение, необходимое для корректировки). Таким образом, Gp=Gd=0.
Регулировку корректора производят таким образом, чтобы корректировать модель mod_PARAM достаточно быстро и чтобы учитывать переконфигурирование газотурбинного двигателя (например, изменение уровней отбора воздуха на компрессоре высокого давления).
Модель по сегменту (2D)
Рассмотрим сегмент модели mod_PARAM, которого касается измерение Val_PARAM, произведенное на этапе Е1. Этот сегмент имеет две концевые точки слева и справа, обозначенные А и В.
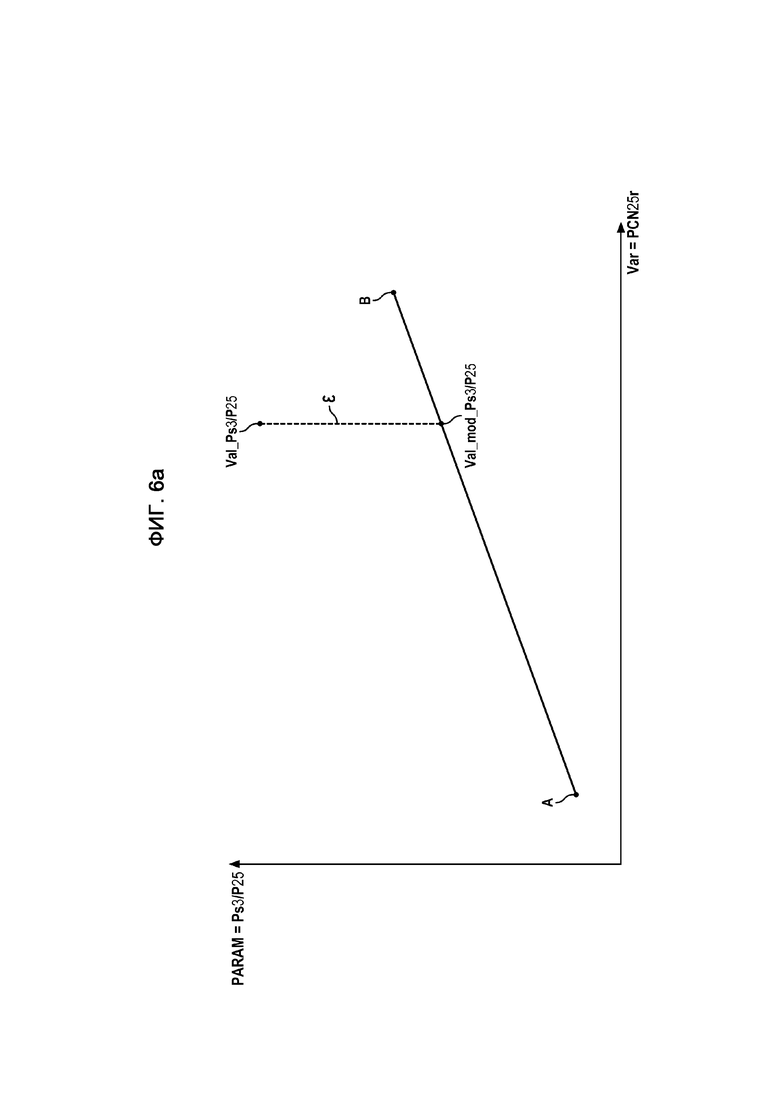
Корректирование по точкам
В первом решении, показанном на фиг. 6а и 6b, учитывают поправку, изменяя координаты только одной точки сегмента, например, одной из концевых точек А или В, тогда как другая является зафиксированной.
В данном случае выход корректора 122 напрямую влияет на точку В (соответственно на точку А), а точка А (соответственно точка В) остается зафиксированной. Однако это решение заставляет зафиксировать по меньшей мере одну из точек модели mod_PARAM, чтобы она служила точкой отсчета, от которой будет распространяться влияние на другие сегменты модели mod_PARAM. Таким образом, во время этапа Е2 корректировки и, более конкретно, во время подэтапа Е231 перемещают только одну из двух точек. После этого осуществляют этап Е232 интерполяции.
Это решение является наиболее простым и наиболее быстрым для вычисления.
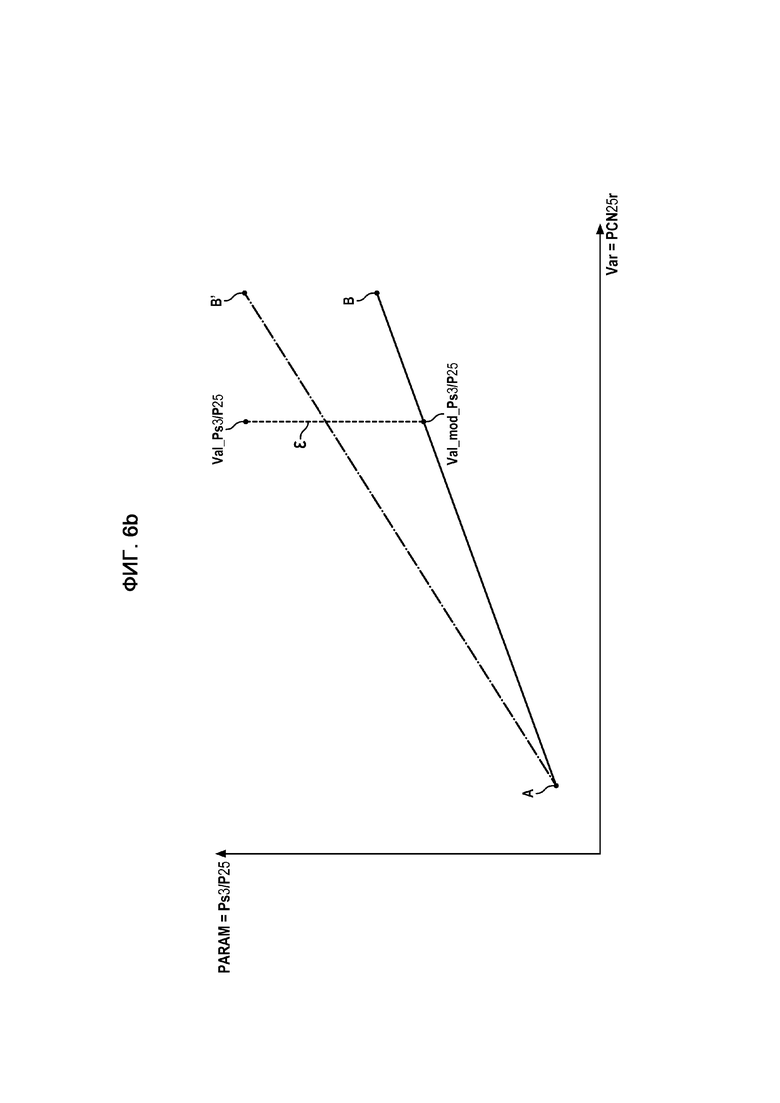
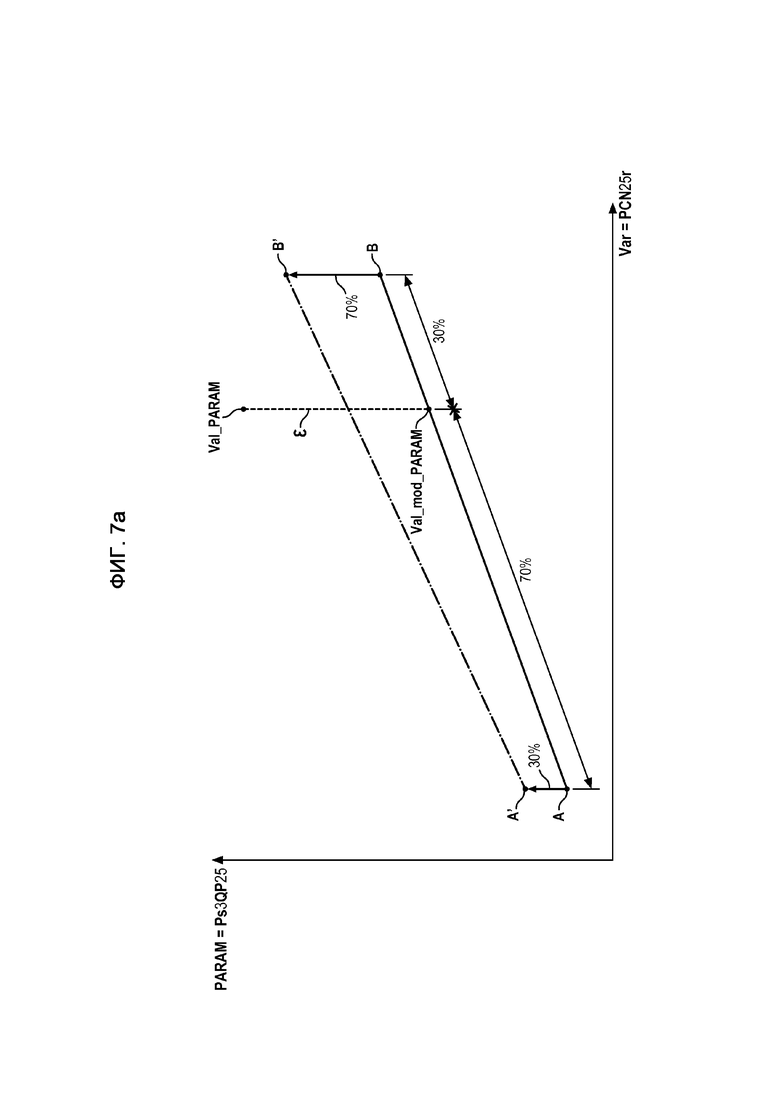
Взвешенная корректировка двух точек сегмента
Второе решение, представленное на фиг. 7а и 7b, состоит во взвешенном распределении поправки, чтобы обеспечить более репрезентативную и более эффективную корректировку выбранного сегмента. В предпочтительном варианте взвешивание выполняют в зависимости от расстояния между значением Val_PARAM, в данном случае Val_Ps3/P25, и точками А и В сегмента.
Фиг. 7а и 7b иллюстрируют корректировку на одном интервале и одном шаге вычисления:
- этап Е1: при помощи одного или двух каналов V10, V20 получения данных получают измеренное значение Val_PARAM; в данном примере речь идет о Val_Ps3,
- этап Е2 (изображение (а) на фиг. 7b): измеренное значение Val_PARAM преобразуют для его соответствия с моделью mod_PARAM; для упрощения сохраним то же обозначение Val_PARAM,
- этап Е31 (изображение (b) на фиг. 7b): измеряют ε, которое является отклонением между измеренным значением Val_PARAM и значением модели Val_mod_PARAM; в примере с давлением Ps3: Val_PARAM=Val_Ps3/P25, то есть измеренное давление Ps3, поделенное на давление Р25 модели, и Val_mod_PARAM=Val_mod_Ps3/Р25, давление Ps3 скорректированной (при предыдущих итерациях) модели, которое делят на Р25 модели,
- этап Е32 (изображение (b) на фиг. 7b): погрешность ε минимизируют через корректор 122 путем ее интегрирования, чтобы вычислить поправку corr,
- этап Е331 (фиг. 7а): после этого (или перед этапом Е31) измеряют расстояние от точки Val_mod_PARAM, в данном случае Val_mod(Ps3/Р25), до точки А, которое составляет нижний предел интервала переменной Var (в данном случае PCN25R) и которое является функцией линеаризации выбранной модели, по отношению к расстоянию между точками А и В. В заключение, поправку распределяют по ординате точек А (чтобы получить А’) и В (чтобы получить B'),
- этап Е332 (изображение (с) на фиг. 7b): между двумя скорректированными точками А' и В' интерполируют новый сегмент.
Принцип работы состоит в распределении поправки corr корректора 122 в одном интервале по ординатам точек А и В в соответствии с тем же принципом, что и выше: в варианте осуществления, распределяют Х% поправки на ординату точки В, где Х является отношением расстояния от точки Val_mod_PARAM до точки А к расстоянию от точки А до точки В. На ординату точки А распределяют 100-Х% поправки (30% и 70% на фиг. 7а).
После получения двух точек А’ и В’ на этапе Е232 достаточно интерполировать модель между этими двумя точками. Поскольку правило определено как правило по сегменту, линейная (или аффинная) интерполяция является простой.
В альтернативном варианте при помощи поправки можно переместить любые другие (разные) точки сегмента: достаточно выбрать две точки, и линейная (или аффинная) интерполяция позволяет дополнить остальную часть рассматриваемого сегмента.
Этот метод обеспечивает эффективную и быструю корректировку для получения скорректированной модели mod_PARAM. Вместе с тем, поскольку эта модель mod_PARAM зависит только от одной переменной Var (PCN25R в случае mod_Ps3), она может оказаться недостаточной в некоторых ситуациях полета, в частности, когда интересующий параметр PARAM зависит от нескольких переменных Var1, Var2.
Модель по плоскости (3D)
Чтобы учитывать несколько переменных, модель mod_PARAM может быть функцией двух переменных (mod_PARAM(Var 1, Var 2)) и может быть выражена в виде правила, определяемого по плоскостям, при этом правило является линейным на каждой плоскости, как показано на фиг. 8.
Фиг. 9 иллюстрирует метод корректировки в случае модели по плоскости.
Например, в случае давления Ps3 во время активации уровня отбора воздуха модель mod_Ps3/Р25(PCN25R) (то есть модель Ps3, сокращенную на Р25, в функции от PCN25R) изменяют, поскольку часть воздуха, сжимаемого компрессором высокого давления, направляется в систему воздуха самолета. Корректор 122 двухмерной модели по сегменту может обеспечить адаптацию к этой конфигурации, если коэффициенты усиления корректора 122 отрегулированы таким образом, чтобы корректировка модели была быстрой, но это может создать другие трудности.
Отбор воздуха производится из потока первого контура. Отбираемый воздух может использоваться самолетом (например, для повышения давления в кабине). Он может также направляться в поток второго контура (VBV от Variable Bleed Valve, TBV от Turbine Bypass Valve), при этом ставится задача уменьшения давления на выходе компрессора, чтобы избежать помпажа. В зависимости от объема воздуха, необходимого для самолета, и от объема, направляемого в поток второго контура для регулирования двигателя, можно определить уровни отбора воздуха. Эти уровни отбора оказывают влияние на корреляцию режим/ Ps3, так как в зависимости от уровня отбираемого воздуха можно получить разные давления при одном и том же режиме двигателя. При этом становится трудно определить модель для регулирования Ps3 в виде функции от режима. Решение, разработанное в различных вариантах для решения этой проблемы, состоит в определении нескольких моделей, при этом каждая модель соответствует данному уровню отбора воздуха. Затем корректор должен менять модель в зависимости от уровня активного отбора воздуха в данный момент.
Для этого же примера давления Ps3, чтобы решить проблему отбора воздуха, применяют модель Ps3/Р25, которая уже имеет вид функции не только от PCN25R, но также от PCN12R: при этом определяют mod_Ps3/Р25(PCN25R, PCN12R). Во время активации отборов изменяют правило, связывающее PCN25R и PCN12R, что позволяет учитывать переконфигурирование системы. Таким образом, корректирование этого правила требует нового “3D” корректора.
Корректировка по точкам
Первое решение, не показанное на фигурах, состоит в том, что корректировку учитывают, фиксируя координаты только одной точки прямоугольника, например, одной из вершин А, В, С или D прямоугольника, и изменяя координаты двух точек прямоугольника, например, двух из вершин А, В, С или D. В альтернативном варианте можно зафиксировать две точки, фиксируя координаты двух точек прямоугольника, например, две из вершин А, В, С или D прямоугольника, и изменяя координаты одной точки прямоугольника, например, двух из вершин А, В, С или D.
Соответствующие точки перемещают во время подэтапа Е331, затем осуществляют этап Е332 интерполяции на всем прямоугольнике. Поскольку каждый раз работают на трех точках, то с уверенностью получают интерполированный прямоугольник.
Взвешенная корректировка
Для обеспечения взвешенной корректировки, при которой ни одна точка не является фиксированной, производят линеаризацию модели mod_PARAM, разбивая прямоугольник АВСD на треугольники ABC, ABD, как правило, на два комплементарных треугольника (фиг. 8). Действительно, три точки А, В, С всегда являются компланарными до и после корректировки, что обеспечивает возможность интерполяции скорректированного треугольника на подэтапе Е332 интерполяции после осуществления подэтапа Е331 корректировки трех точек. Таким образом, полученные при помощи поправки три новые точки можно использовать для описания декартового уравнения плоскости, что позволяет нам линейно интерполировать модель mod_PARAM.
Действительно, если поправку, взвешенную по трем точкам поверхности, применить к четырем точкам, например, к четырем вершинам ABCD прямоугольника, может произойти деформация прямоугольника, если четыре точки прямоугольника перестают быть компланарными (невозможно интерполировать координаты параметра PARAM при помощи декартового уравнения плоскости).
На подэтапе Е331 сначала речь идет о выборе треугольника для корректировки в зависимости от значения Val_PARAM (называемого точкой Х), полученного на этапах Е1 и Е2. Для этого определяют разность наклона между сегментом АС, который делит прямоугольник на две части, и сегментом АХ (фиг. 10b). Можно использовать любую вершину В, С или D.
Действительно, с четырьмя точками А, В, С, D, образующими прямоугольник, и точкой Х, соответствующей измеренной точке Val_PARAM, необходимо определить, принадлежит Х к треугольнику АВС или к треугольнику ACD (можно напомнить, что эти треугольники были выбраны произвольно относительно ABD и DBC).
Для этого по время подэтапа Е331 производят сравнение значений степени изменения ΔАС, ΔАХ прямых (АС) и (АХ). Действительно, если ΔАХ > ΔАС, то выбирают ACD, и если ΔАХ ≤ ΔАС, то выбирают АВС. Затем необходимо распределить поправку.
В отличие от двухмерной сегментной модели расстояния между точкой Х и точками треугольника АВС не учитывают распределения применяемой поправки. Следовательно, распределение следует производить в зависимости от площадей треугольников ХАВ, ХАС и ХВС (см. фиг. 10с, где х является площадью ХВС, у является площадью АХС, и z является площадью ХАВ).
При этом определяют соотношения corr_A, corr_B, corr_C при помощи corr_a = x/(x + y + z), corr_b = y/(x + y + z), и corr_z = z/(x + y + z).
Соотношение corr_A применяют для корректировки точки А, corr_В для корректировки точки В и corr_С для корректировки точки D.
Наконец, на основании трех скорректированных точек осуществляют подэтап Е332 интерполяции при помощи простого декартового уравнения плоскости, чтобы интерполировать весь треугольник.
Матричная сегментная модель (2D)
Как было указано выше сегментная модель 2D имела ограничения, в частности, когда на модель mod_PARAM может сильно влиять другая переменная.
Показанное на фиг. 11 другое решение для учета другой переменной состоит в сохранении в памяти 120 матрицы М модели mod_PARAM 2D. Вместо модели в виде Val_PARAM(Var 1, Var 2) получают модель в виде mod_PARAM_Var2(Var1), где mod_PARAM_Var2 обозначает модель, применимую для данного значения (или для совокупности данных значений) переменной Var 2.
На фиг. 11 показана mod_Ps3_PCN12R(PCN25R). В данном случае PCN12R не обязательно обозначает точное значение переменной, а обозначает лишь уровень, который может быть интервалом или может быть дискретным значением.
В случае давления Ps3, когда параметром PARAM является Ps3/Р25 и когда переменной Var1 является PCN25R, в памяти 120 может быть записано множество моделей mod_Ps3, соответствующих уровням отбора, то есть от PCN12R.
В этом варианте осуществления изобретения число записанных моделей является ограниченным. Следовательно, значения PCN12R могут быть выражены некоторым числом уровней отбора воздуха на самолете.
Следовательно, перед описанным выше этапом Е31 на этапе Е30 выбирают модель Val_PARAM_Var2 в виде функции от значения переменной Var2, затем модель Val_PARAM_Var2 корректируют, как модель 2D, во время этапов Е31, Е32 и Е33. Параллельно с этапом Е1 осуществляют этап измерения или получения данных переменной Var2, которая определяет выбор модели Val_PARAM_Var2.
Регулирование динамики корректоров
Регулирование динамики 2D-корректора осуществляют, учитывая две противоречивые потребности:
- динамика должна быть достаточно медленной, чтобы известные случаи дрейфов одного из каналов V10, V20 получения данных не заставляли модель отклоняться по среднему значению каналов V10, V20 (чтобы можно было предпочесть один из каналов в момент, когда появляется погрешность отклонения),
- динамика должна быть достаточно быстрой, чтобы соответствующие диапазоны режимов все же оказались скорректированными (в частности, режимы, проходимые вплоть до режима взлета (“take-off”), во время взлета).
Поскольку имеется корректор 122 модели 2D по сегменту или модели 3D по плоскости, то можно осуществить регулирование корректоров (в основном интегрального корректора) независимо друг от друга:
- при этом применяют быструю динамику для диапазонов режимов, проходимых быстро во время традиционного полета. Это позволяет ответить на требование корректировки за очень малое время этих диапазонов режимов,
- медленную динамику применяют для диапазонов режимов, для которых время корректировки не является строгим требованием (примеры: режим малых оборотов на земле, крейсерский полет, набор высоты). В случае давления Ps3 это позволяет наилучшим образом предупредить риски корректировки по среднему значению каналов Ps3 в случае дрейфа одного из них на этих диапазонах режима.
Далее следует описание способа анализа старения газотурбинного двигателя, как показано на фиг. 12. Возьмем опять пример давления Ps3 и предыдущих моделей корректировки, но принцип можно применять точно так же для любого способа корректировки, позволяющего создать скорректированную модель Rmod_PARAM.
При каждой корректировки осуществляют этап Е3 и создают «скорректированную» модель mod_PARAM (mod_Ps3, mod_Ps3/Р25 и т.д.). Если целью этой корректировки является более эффективный выбор, скорректированная модель mod_Ps3/Р25 заменяет собой предыдущую модель mod_Ps3/Р25, которая по сути теряет силу. В этой связи в памяти 120 можно произвести перезапись.
Однако, поскольку каждая модель mod_Ps3/Р25 отличается от предыдущей модели (как минимум на нескольких сегментах или нескольких плоскостях), то можно последовательно наблюдать общее изменение модели mod_Ps3/Р25, сравнивая все (или некоторое число) скорректированных моделей.
Таким образом, во время способа измерения старения газотурбинного двигателя применяют различные описанные выше способы корректировки.
Способ анализа газотурбинного двигателя содержит этап F1 осуществления способа корректировки, содержащего этапы Е1, Е2, Е3, Е4, и этап F2 сохранения скорректированной модели mod_PARAM в памяти, которая может быть памятью 120. В отличие от этапа Е4, который может повлечь за собой удаление предыдущей модели, этап F2 предполагает безусловное сохранение (то есть не промежуточное сохранение) модели mod_PARAM.
Этапы F1 и F2 повторяют по меньшей мере два раза и предпочтительно многократно.
Следует, в частности, отметить, что поведение компрессора может ухудшаться по-разному в зависимости от окружающей среды (холод, песок и т.д.) и от неожиданных событий (попадание внутрь птицы, что может привести к помпажу или к небольшому повреждению лопаток). Корректировка позволяет модели «стареть» одновременно с ее двигателем. Следовательно, необходимо иметь возможность ее корректировки за один или два полета, но она не должна быть чувствительной к изменениям Ps3 на основе нескольких секунд.
Поскольку речь идет об анализе газотурбинного двигателя, то есть об отслеживании его изменения во времени, предпочтительно, чтобы память 120 сохраняла скорректированные модели mod_PARAM, созданные за интервалы более одних суток и даже за месяц, квартал или полугодие.
После получения всех этих данных процессор 110 осуществляет этап F3 сравнения, чтобы сравнить различные скорректированные модели mod_PARAM. Это сравнение позволяет сделать вывод о состоянии газотурбинного двигателя.
Например, в случае давления Ps3 при одном и том же PCN25R «свежий» компрессор ВД будет иметь более высокое давление Ps3, чем «старый» компрессор. Ухудшение степени сжатия выражается понижением Ps3 при данном PCN25R. Таким образом, сравнение моделей позволяет определить изменение состояния двигателя.
Этап F3 может осуществляться непосредственно вычислительным блоком 100, чтобы узнавать состояние газотурбинного двигателя или летательного аппарата, как только этого потребует оператор. В альтернативном варианте этот этап F3 осуществляют в конструкторском бюро после сбора данных. Точно так же, этап F2 можно осуществлять при помощи памяти 120 вычислительного блока, но скорректированные модели Rmod_PARAM можно также передавать в память, внешнюю относительно летательного аппарата или газотурбинного двигателя, в частности, в конструкторское бюро, чтобы затем осуществить этап F3.
Например, можно произвести анализ старения компрессора высокого давления на основании изменения модели mod_Ps3/Р25(PCN25R). Поскольку производительность компрессора со временем снижается, отслеживание моделей mod_Ps3/Р25(PCN25R) позволяет постоянно получать информацию, отображающую текущее состояние компрессора.

Настоящее изобретение относится к способу корректировки модели (mod_Ps3 (PCN25R)) статического давления, называемой «моделью Ps3», на входе камеры сгорания в газотурбинном двигателе, содержащем компрессор (3), при этом модель Ps3 используется для того, чтобы сделать выбор между двумя каналами (V10, V20) получения данных статического давления (Ps3), называемого «давлением Ps3», на входе камеры сгорания, при этом два канала (V10, V20) получения данных используют два датчика (10, 20), причем модель выражает давление Ps3 в виде функции от по меньшей мере режима (PCN25R), называемого «режимом PCN25R», компрессора (3) и способ включает выполнение следующих этапов: Е1: измерение значения давления Ps3 при помощи двух датчиков (10, 20), Е2: корректировка модели Ps3 при помощи результатов измерения значения давления Ps3. 3 н. и 24 з.п. ф-лы, 12 ил.
1. Способ корректировки рабочего параметра газотурбинного двигателя (1) или летательного аппарата, причем модель рабочего параметра предназначена для выполнения выбора между двумя каналами (V10, V20) получения данных указанного рабочего параметра, указанные два канала (V10, V20) получения данных используют два датчика (10, 20),
модель сохраняется в памяти (120), и модель выражает статическое давление выше по потоку от камеры сгорания в газотурбинном двигателе, содержащем компрессор (3), в виде функции по меньшей мере одного параметра компрессора (3), и рабочий параметр представляет собой статическое давление выше по потоку от камеры сгорания,
указанная модель определена как правило по сегменту, указывающее значение указанного рабочего параметра в виде функции переменной, или определена как правило по плоскости, указывающее значение указанного рабочего параметра в виде функции двух переменных, при этом указанное правило является аффинным по каждому сегменту или аффинным по каждой плоскости,
модель сохраняется в памяти (120),
способ включает этапы, на которых:
Е1: измеряют указанный рабочий параметр одним из двух датчиков (10, 20),
Е2: корректируют модель с использованием полученного результата измерения указанного рабочего параметра.
при этом при указанной коррекции выполняют этапы, на которых:
- вычисляют погрешность (ε) путем сравнения указанного значения рабочего параметра с соответствующим значением модели, при этом указанное значение модели принадлежит одному из указанных сегментов или одной из плоскостей модели (этап Е31),
- применяют корректор (112) с минимизацией указанной погрешности (ε) для определения поправки (corr) (этап Е32),
- выполняют коррекцию сегмента модели или плоскости модели с помощью указанной поправки (corr), чтобы изменить положение указанного сегмента или указанной плоскости и, таким образом, получить скорректированную модель указанного рабочего параметра (этап Е33),
- перемещают две точки для модели по сегментам и три точки для модели по плоскости (подэтап Е331),
- интерполируют остальную часть модели между этими точками (подэтап Е332).
2. Способ по п.1, в котором указанная модель является моделью статического давления выше по потоку от камеры сгорания на давлении компрессора (3).
3. Способ по п. 1 или 2, в котором указанная модель выражается в виде функции от числа оборотов ротора компрессора, сокращенного на температуру указанного компрессора.
4. Способ по п. 3, в котором указанную коррекцию выполняют на указанной модели в виде функции от числа оборотов ротора компрессора, сокращенного на температуру указанного компрессора.
5. Способ по любому из пп. 1-4, в котором указанный компрессор является компрессором высокого давления, если газотурбинный двигатель (1) также содержит компрессор (2) низкого давления выше по потоку от компрессора (3) высокого давления.
6. Способ по любому из пп. 1-5, в котором в каждом сегменте модель является линейной.
7. Способ по любому из пп. 1-6, в котором этап коррекции по сегменту осуществляют с помощью корректора, например интегрального корректора.
8. Способ по любому из пп. 1-7, в котором указанная модель дополнительно выражена как функция скорости компрессора низкого давления, сокращенной на температуру компрессора низкого давления (2).
9. Способ по любому из пп. 1-8, в котором модель выражена также в виде функции от полного внешнего давления.
10. Способ по любому из пп. 1-9, в котором корректируемую модель выбирают на основе уровня отбора воздуха на самолете в компрессорах, а в памяти (120) записано множество моделей, выраженных в виде функции от отбора воздуха в самолете.
11. Способ по п. 1, в котором на этапе получения значения рабочего параметра:
- выполняют прямое измерение указанного рабочего параметра при помощи датчика (10, 20), или
- измеряют сторонний параметр, от которого зависит указанный рабочий параметр, или
- выполняют моделирование.
12. Способ по п. 1 или 11, в котором корректор (112) является ПИД-корректором или интегральным корректором.
13. Способ по любому из пп. 1, 11, 12, в котором, когда модель является правилом по сегменту, коррекцию выполняют, фиксируя одну точку сегмента (A, B) и перемещая другую точку сегмента (A, B), применяя поправку (corr), при этом обе точки (A, B) предпочтительно являются концами сегмента.
14. Способ по любому из пп. 1, 11-13, в котором, когда модель является правилом по сегменту, коррекцию выполняют, не сохраняя ни одной точки сегмента неподвижной, например, перемещая оба конца (A, B) сегмента, применяя поправку (corr).
15. Способ по п. 14, в котором перемещение концов (A, B) сегмента осуществляют в зависимости от соответствующего расстояния от указанного соответствующего значения модели.
16. Способ по п. 14 или 15, в котором распределение поправки (corr), применяемой к концу (A, B) сегмента, равно отношению расстояния от соответствующего значения модели до другого конца (B, A) сегмента к длине сегмента (AB).
17. Способ по любому из пп. 13-16, в котором на этапе коррекции сегмента модели выполняют линейную интерполяцию между двумя скорректированными точками.
18. Способ по любому из пп. 1, 11, 12, в котором, когда модель является правилом по плоскости, плоскость имеет форму прямоугольника (ABCD), разбитого на треугольники (ABC, ABD), и коррекцию осуществляют, фиксируя одну или две вершины треугольника и перемещая две оставшиеся вершины или одну оставшуюся вершину треугольника с применением поправки (corr).
19. Способ по любому из пп. 1, 11, 12, в котором, когда модель является правилом по плоскости, плоскость разбивают на треугольники и корректировку осуществляют, перемещая три вершины (A, B, C) треугольника.
20. Способ по п. 19, в котором перемещение каждой вершины (А, В, С) треугольника осуществляют в зависимости от площади субтреугольника (ХВС, ХАС, ХАВ), определенного двумя другими вершинами (ВС, АС, АВ) и указанным соответствующим значением модели.
21. Способ по п. 20, в котором распределение поправки (corr), применяемой к вершине треугольника, равно отношению площади субтреугольника, определенного другими вершинами и указанным соответствующим значением модели, к площади треугольника (АВС).
22. Способ по любому из пп. 18-21, в котором на этапе коррекции треугольника выполняют линейную интерполяцию на основе скорректированных точек (АВС).
23. Способ по любому из пп. 1, 11-22, в котором рабочим параметром является статическое давление выше по потоку от камеры сгорания или рабочим параметром является статическое давление выше по потоку от камеры сгорания, поделенное на давление компрессора, при этом:
- когда модель является правилом по сегменту, переменной (Var) является число оборотов ротора компрессора, сокращенное на температуру указанного компрессора, и
- когда модель является правилом по плоскости, переменными (Var1, Var2) являются указанные число оборотов ротора компрессора высокого давления, сокращенное на температуру указанного компрессора, и число оборотов ротора компрессора низкого давления, сокращенное на температуру указанного компрессора, или число оборотов ротора компрессора высокого давления, сокращенное на температуру указанного компрессора, и общее внешнее давление.
24. Способ по любому из пп. 1, 11-23, в котором корректируемую модель выбирают в соответствии с переменной, при этом в памяти (120) записано множество моделей, выраженных в виде функции от отбора воздуха на самолете, при этом переменной может быть уровень отбора воздуха на самолете в компрессорах.
25. Способ по любому из пп. 1, 11-24, в котором коэффициенты усиления корректора являются разными для разных сегментов или плоскостей модели.
26. Способ выбора между двумя каналами (V10, V20) получения данных, включающий этапы, на которых:
- А1: выполняют способ коррекции по любому из пп. 1-25,
- А2: выбирают канал (V10, V20) получения данных, наиболее близкий к скорректированной модели.
27. Способ анализа старения газотурбинного двигателя (1), характеризующийся тем, что состоит из выполнения этапов, на которых:
- F1: выполняют способ корректировки по любому из пп. 1-25,
- F2: сохраняют скорректированную модель в энергонезависимой памяти (120), при этом этапы F1 и F2 повторяют по меньшей мере два раза, а предпочтительно больше,
- F3: сравнивают различные скорректированные модели, чтобы сделать вывод об изменении состояния газотурбинного двигателя.
| US 2014326213 A1, 06.11.2014 | |||
| СПОСОБ РАЗРАБОТКИ ЗАЛЕЖИ ВЫСОКОВЯЗКОЙ НЕФТИ ИЛИ БИТУМОВ | 2010 |
|
RU2434127C1 |
| US 2019080523 A1, 14.03.2019 | |||
| СПОСОБ РАЗРАБОТКИ ЗАЛЕЖИ ВЫСОКОВЯЗКОЙ НЕФТИ ИЛИ БИТУМОВ | 2010 |
|
RU2434127C1 |
| US 2014326213 A1, 06.11.2014. | |||

