Заявляемое техническое решение относится к электротехнике, а именно к электроприводам с синхронными гистерезисными двигателями (СГД).
При скачкообразном изменении напряжения питания СГД ротор двигателя начинает качаться с частотой собственных колебаний, в результате чего появляется модуляция мгновенной скорости вращения ротора. Причиной этих колебаний является возникновение угла рассогласования между вектором результирующего магнитного поля в воздушном зазоре двигателя и вектором намагниченности ротора вследствие инерционности ротора СГД.
При колебании ротора происходит изменение момента и потребляемой СГД мощности, что, в свою очередь, приводит к появлению низкочастотной составляющей в цепи питания СГД и, соответственно, в цепи питания инвертора, вырабатывающего напряжение питания СГД.
Известно устройство, используемое в способе уменьшения колебаний ротора СГД при скачкообразном изменении напряжения питания СГД путем сдвига на фиксированную величину фазы напряжения питания, описанное в авторском свидетельстве СССР №674181 «Способ перевозбуждения синхронных гистерезисных электродвигателей» (кл. МПК H02P 7/44, дата приоритета 25.11.1971 г.) [1]. В данном способе перевозбуждение синхронных гистерезисных электродвигателей с инерционным характером нагрузки путем кратковременного увеличения амплитуды напряжения питания в синхронном режиме и скачкообразного её снижения до рабочего значения в режиме перевозбуждения одновременно с изменением амплитуды изменяет и фазу напряжения питания, причем при увеличении амплитуды фазу изменяют в сторону отставания, а при её уменьшении - в сторону опережения.
Также известно «Устройство для питания синхронного гистерезисного гироскопического двигателя с перевозбуждением», изложенное в патенте РФ № 2100899 (кл. МПК H02P 7/44, дата приоритета 26.08.1984 г.) [2]. В этом устройстве для обеспечения устойчивого и однозначного режима перевозбуждения СГД введен синхронизатор, который служит для привязки внешней команды управления режимом перевозбуждения к тактовой частоте задающего генератора.
В вышеупомянутых устройствах [1 и 2], для обеспечения устойчивой работы инвертора, после включения режима перевозбуждения фаза выходного напряжения инвертора изменяется на фиксированную величину и потом остается неизменной, в результате чего процесс успокоения синхронных качаний ротора СГД имеет большую длительность и может вызвать частичное стирание эффекта перевозбуждения. К недостаткам этих устройств можно также отнести отсутствие успокоения синхронных качаний ротора СГД при возмущениях по цепи питания инвертора, при переключениях в силовой части инвертора, например, при отключении избыточных компенсирующих конденсаторов, при изменении параметров нагрузки СГД.
Известно устройство для успокоения колебаний ротора СГД, при котором выделяют низкочастотную составляющую мгновенной частоты вращения ротора и подают ее на вход регулятора напряжения питания СГД, описанное в авторском свидетельстве СССР № 420070 «Электропривод» (класс МПК H02P 7/46, дата приоритета 02.07.1971 г.) [3]. Это устройство содержит один или несколько синхронных электродвигателей и автономный инвертор с регулятором напряжения, причем цепь управления регулятором напряжения подключена через фильтр низких частот к датчику тока во входной цепи инвертора.
Также известно устройство для питания синхронного гистерезисного электродвигателя по авторскому свидетельству СССР «Способ стабилизации мгновенной частоты вращения ротора гистерезисного электродвигателя» № 1164850 (класс МПК H02P 7/36, дата приоритета 18.10.1982 г.) [4]. В данном случае контролируют изменение мгновенной частоты вращения ротора, выделяют её низкочастотную составляющую, определяемую собственной частотой качания ротора, измеряют режим питания электродвигателя и контролируют фазу низкочастотной составляющей мгновенной частоты вращения ротора, устанавливают факт превышения нестабильности частоты вращения заданного уровня, по достижению низкочастотной составляющей мгновенной частоты вращения ротора заданного значения увеличивают среднее значение полупериода напряжения питания по времени, совпадающего с заданным значением фазы низкочастотной составляющей мгновенной частоты вращения, повторяют указанные операции с частотой, кратной частоте низкочастотной составляющей мгновенной частоты вращения ротора.
Недостатком этих устройств является то, что узел успокоения колебаний ротора СГД изменяет режим питания двигателя путем формирования по цепям статора двигателя импульсов напряжения большой амплитуды, что вызывает относительно большие затраты потребляемой энергии от источника питания и создает серьезные электромагнитные помехи. Кроме того, в изобретении [4] есть порог по величине качаний ротора, ниже которого они не успокаиваются.
Наиболее близким к заявляемому техническому решению и потому принятому за прототип является «Устройство для регулирования гистерезисного двигателя» по авторскому свидетельству №1527699 (кл. МПК H02P 7/36, дата приоритета 21.06.1988 г.) [5].
Данное устройство содержит регулятор напряжения, вход которого предназначен для подключения к источнику напряжения питания постоянным током, а выход через инвертор и датчик тока предназначен для подключения к гистерезисному двигателю, выход датчика тока подключен к входу фильтра, управляющий вход инвертора через регулятор фазы и фазовращатель подключен к задающему генератору, усилитель переменного тока, коммутатор, блок задержки и D-триггер, при этом последовательно соединенные усилитель переменного тока и коммутатор включены в цепь между выходом фильтра и управляющим входом регулятора напряжения, вход D-триггера и блока задержки являются входами внешних команд, выход D-триггера соединен с управляющими входами регуляторов фазы и напряжения, а вход синхронизации D-триггера соединен с задающим генератором, выход блока задержки соединен с управляющим входом коммутатора. В этом устройстве выделяют низкочастотную составляющую мгновенной скорости вращения ротора и подают ее на вход регулятора напряжения питания СГД, чтобы скомпенсировать изменение мгновенной скорости вращения ротора. Кроме того, при работе в режиме перевозбуждения одновременно со снижением напряжения питания СГД изменяется на фиксированную величину фаза этого напряжения.
К недостаткам этого устройства можно отнести то, что фаза напряжения питания СГД изменяется на фиксированную величину и только при уменьшении напряжения питания СГД. Кроме того, обратная связь для полного подавления колебаний ротора регулирует напряжение питания СГД, то есть процесс демпфирования колебаний сопровождается существенным изменением напряжения питания с частотой собственных колебаний ротора, что вызывает дополнительные потери энергии и частичное размагничивание ротора синхронного гистерезисного двигателя, то есть уменьшение эффекта перевозбуждения.
Задачей заявляемого технического решения является упрощение схемы демпфирования колебаний ротора.
Указанная задача достигается за счет того, что в известном устройстве для питания синхронного гистерезисного двигателя, состоящем из инвертора, датчика тока, задающего генератора, согласно заявляемого технического решения используется блок выделения низкочастотной составляющей мгновенной частоты вращения ротора синхронного гистерезисного двигателя из переменного тока, вход которого соединён с выходом датчика переменного выходного тока, а его выход - с входом управления частотой задающего генератора, причем датчик переменного тока включен в цепь выходного тока инвертора.
Вариантом заявляемого технического решения является устройство для питания синхронного гистерезисного двигателя, в котором датчик постоянного тока включен в цепь питания инвертора, и используется блок выделения низкочастотной составляющей мгновенной частоты вращения ротора синхронного гистерезисного двигателя из постоянного тока питания инвертора, вход которого соединён с выходом датчика постоянного тока, а его выход - с входом управления частотой задающего генератора, что позволяет также успокаивать колебания ротора синхронного гистерезисного двигателя.
Для успокоения колебаний ротора двигателя используется только изменение фазы напряжения питания СГД, то есть демпфирование колебаний ротора двигателя происходит без изменения величины этого напряжения.
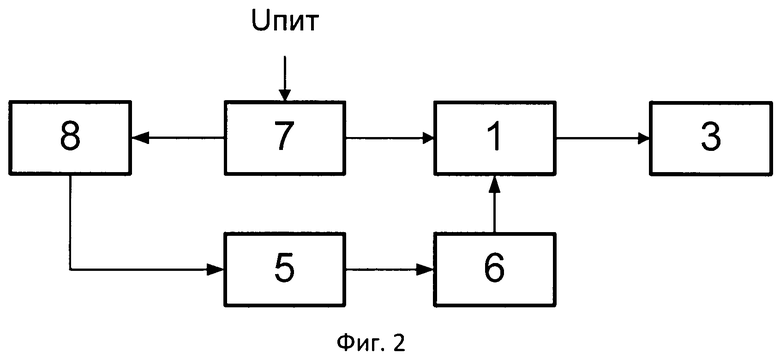
Заявляемое техническое решение поясняется фиг.1, на которой представлена структурная схема заявляемого устройства для питания синхронного гистерезисного двигателя, реализующая стабилизацию мгновенной частоты вращения только за счет регулировки фазы напряжения питания СГД и фиг.2, где показан вариант заявляемого технического решения.
Заявляемое устройство для питания синхронного гистерезисного электродвигателя содержит инвертор (1) с подключенным к нему через датчик переменного выходного тока (2) синхронным гистерезисным электродвигателем (3). Выходной сигнал датчика переменного выходного тока (2) подается на вход блока выделения низкочастотной составляющей мгновенной частоты вращения ротора СГД из переменного тока (4), а его выход подключен к входу управления частотой задающего генератора (5), выход которого через делитель частоты и фазорасщепитель (6) соединен с управляющими входами инвертора (1).
Заявляемое устройство работает следующим образом. В случае скачкообразного изменения напряжения питания синхронного гистерезисного электродвигателя (3) или при воздействии нагрузки на синхронный гистерезисный электродвигатель (3), его ротор начинает качаться с частотой собственных колебаний, что может привести к размагничиванию ротора, и в цепи питания синхронного гистерезисного электродвигателя (3) возникает низкочастотная составляющая мгновенной частоты вращения ротора. Блок выделения низкочастотной составляющей мгновенной частоты вращения ротора из переменного тока (4) выделяет эту составляющую и изменяет частоту задающего генератора (5) и фазу импульсов на выходе делителя частоты и фазорасщепителя (6), подключенного к выходу задающего генератора (5). В результате этого фаза выходного напряжения инвертора (1) изменяется таким образом, чтобы скомпенсировать изменение мгновенной частоты вращения ротора синхронного гистерезисного электродвигателя (3) путем регулирования фазы его напряжения питания.
Таким образом успокоение колебаний ротора синхронного гистерезисного двигателя происходит быстрее и не приводит к возможному размагничиванию ротора синхронного гистерезисного двигателя.
Вариант выполнения заявляемого технического решения показан на фиг.2.
В этом случае заявляемое устройство для питания синхронного гистерезисного электродвигателя содержит инвертор (1), напряжение питания на который подаётся через датчик постоянного тока питания инвертора (7). К выходу инвертора (1) подключен синхронный гистерезисный двигатель (3). Выходной сигнал датчика постоянного тока питания инвертора (7) подается на вход блока выделения низкочастотной составляющей мгновенной частоты вращения ротора СГД из постоянного тока питания (8), отличающийся по электрической схеме от блока выделения низкочастотной составляющей мгновенной частоты вращения ротора СГД из переменного тока (4). Выход блока выделения низкочастотной составляющей мгновенной частоты вращения ротора СГД из постоянного тока питания (8) подключен к входу управления частотой задающего генератора (5), выход которого через делитель частоты и фазорасщепитель (6) соединен с управляющими входами инвертора (1).
Вариант заявляемого устройства работает следующим образом.
При возникновении колебаний ротора СГД низкочастотная составляющая мгновенной частоты вращения ротора СГД с выхода датчика постоянного тока питания инвертора (7) поступает на блок выделения низкочастотной составляющей (8), который выделяет эту составляющую и изменяет частоту задающего генератора (5) и фазу импульсов на выходе делителя частоты и фазорасщепителя (6), подключенного к выходу задающего генератора (5). В результате этого фаза выходного напряжения инвертора (1) меняется таким образом, чтобы скомпенсировать изменение мгновенной частоты вращения ротора синхронного гистерезисного электродвигателя (3) путем регулирования фазы его напряжения питания.
В заявляемом устройстве в качестве задающего генератора возможно использование серийно выпускаемых микросхем кварцевых генераторов, управляемых по частоте, что позволяет значительно упростить схему устройства для демпфирования колебаний ротора синхронного гистерезисного двигателя и удешевить его .
Как показали результаты применения предлагаемого технического решения, оно существенно проще существующих, так как блок выделения низкочастотной составляющей колебаний ротора СГД фактически состоит из фильтра и усилителя. Качания ротора СГД успокаиваются во всех режимах работы двигателя, в том числе до и после перевозбуждения, при возмущениях по цепи питания инвертора, при изменении параметров нагрузки СГД.
Применение заявляемого устройства для питания синхронного гистерезисного двигателя не вызывает дополнительных потерь энергии от источника питания, не создает электромагнитных помех.
Источники информации
1. Авторское свидетельство СССР №674181, кл. МПК H02P 7/44, дата приоритета 25.11.1971 г.
2. Патент РФ №2100899, кл. МПК H02P 7/44, дата приоритета 26.08.1984 г.
3. Авторское свидетельство СССР №420070, кл. МПК H02P 7/46, дата приоритета 02.07.1971 г.
4. Авторское свидетельство СССР №1164850, кл. МПК H02P 7/36, дата приоритета 18.10.1982 г.
5. Авторское свидетельство СССР №1527699, кл. МПК H02P 7/36, дата приоритета 21.06.1988 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2605088C1 |
| Устройство для питания синхронного гистерезисного двигателя с фазовым перевозбуждением | 2017 |
|
RU2661332C1 |
| Устройство для питания синхронного гистерезисного двигателя с амплитудно-фазовым перевозбуждением | 2016 |
|
RU2637111C1 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ГИРОСКОПИЧЕСКОГО ДВИГАТЕЛЯ С ПЕРЕВОЗБУЖДЕНИЕМ | 1984 |
|
RU2100899C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА | 2007 |
|
RU2360353C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОФАЗНЫМ ИНВЕРТОРОМ | 1987 |
|
RU2067311C1 |
| Способ стабилизации мгновенной частоты вращения ротора гистерезисного электродвигателя | 1982 |
|
SU1164850A1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах с синхронными гистерезисными двигателями. Технический результат - уменьшение потерь энергии и электромагнитных помех. Устройство для питания синхронного гистерезисного двигателя содержит инвертор, датчик тока и задающий генератор, блок выделения низкочастотной составляющей мгновенной частоты вращения ротора синхронного гистерезисного двигателя, вход которого соединен с выходом датчика тока, а его выход - с входом управления частотой задающего генератора. Датчик тока включен в цепь выходного тока инвертора. 2 ил.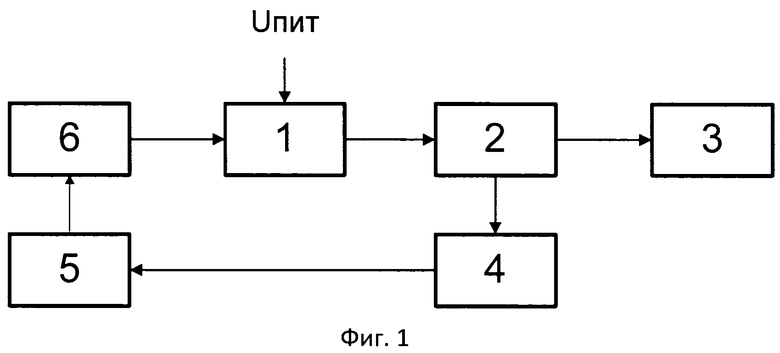
Устройство для питания синхронного гистерезисного двигателя, содержащее инвертор, датчик тока и задающий генератор, отличающееся тем, что используется блок выделения низкочастотной составляющей мгновенной частоты вращения ротора синхронного гистерезисного двигателя, вход которого соединен с выходом датчика тока, а его выход - с входом управления частотой задающего генератора, причем датчик тока включен в цепь выходного тока инвертора.
| ГЕНЕРАТОР ВЫСОКОВОЛЬТНЫХ ИМПУЛЬСОВ | 1999 |
|
RU2164054C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ГИРОСКОПИЧЕСКОГО ДВИГАТЕЛЯ С ПЕРЕВОЗБУЖДЕНИЕМ | 1984 |
|
RU2100899C1 |
| ДИАГНОСТИКУМ И ТЕСТ-СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ АКТИВНОСТИ АНТИРАБИЧЕСКИХ СЫВОРОТОК И ПРЕПАРАТА ГЕТЕРОЛОГИЧНОГО АНТИРАБИЧЕСКОГО ИММУНОГЛОБУЛИНА IN VITRO МЕТОДОМ ДОТ-ИММУНОАНАЛИЗА | 2008 |
|
RU2360252C1 |
| Способ стабилизации мгновенной частоты вращения ротора гистерезисного электродвигателя | 1982 |
|
SU1164850A1 |
| Устройство для регулирования гистерезисного двигателя | 1988 |
|
SU1527699A1 |
| Устройство для контроля состояния предохранителя | 1987 |
|
SU1527676A1 |
| НОВОЕ ДИЗАМЕЩЕННОЕ 1,2,4-ТРИАЗИНОВОЕ СОЕДИНЕНИЕ | 2015 |
|
RU2726410C2 |
| JP 4261843 B2, 30.04.2009 | |||
| US 8410733 B2, 02.04.2013 | |||
| СИНТЕЗ ЦЕОЛИТОВ С ИСПОЛЬЗОВАНИЕМ НАПРАВЛЯЮЩИХ АГЕНТОВ С ПРИБЛИЗИТЕЛЬНО ПЕРПЕНДИКУЛЯРНЫМИ ГРУППАМИ | 2004 |
|
RU2354609C2 |
| WO 2010013226 A3, 04.02.2010 | |||

