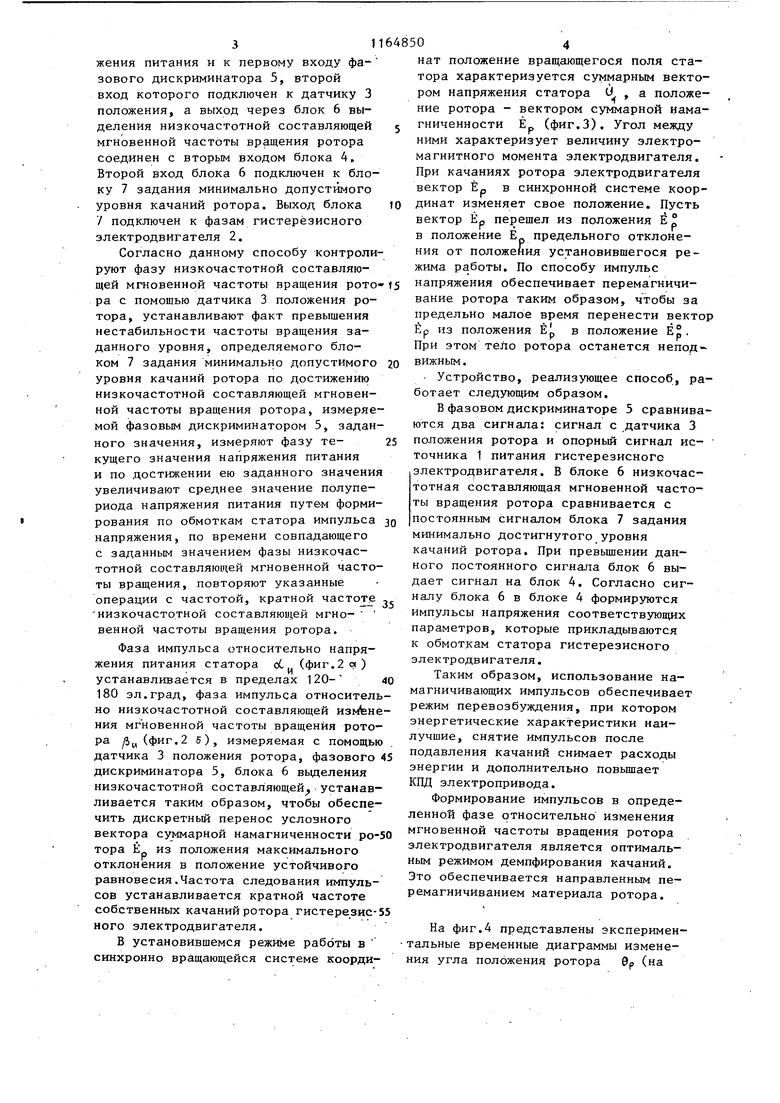
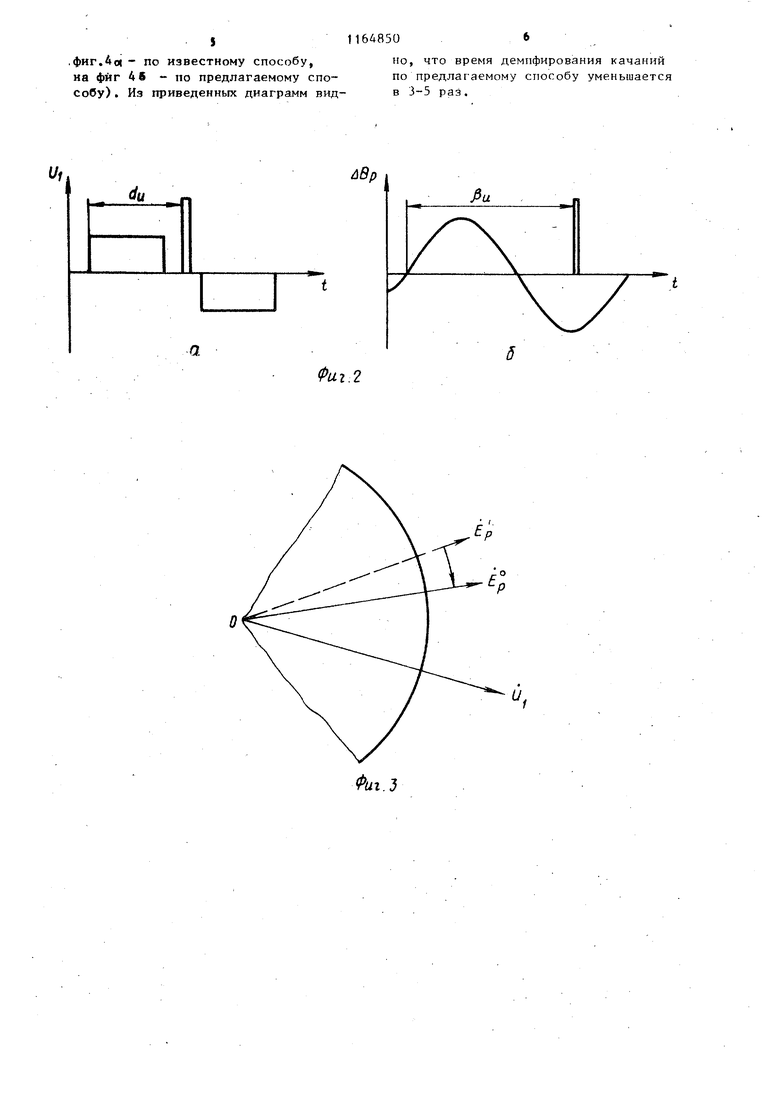
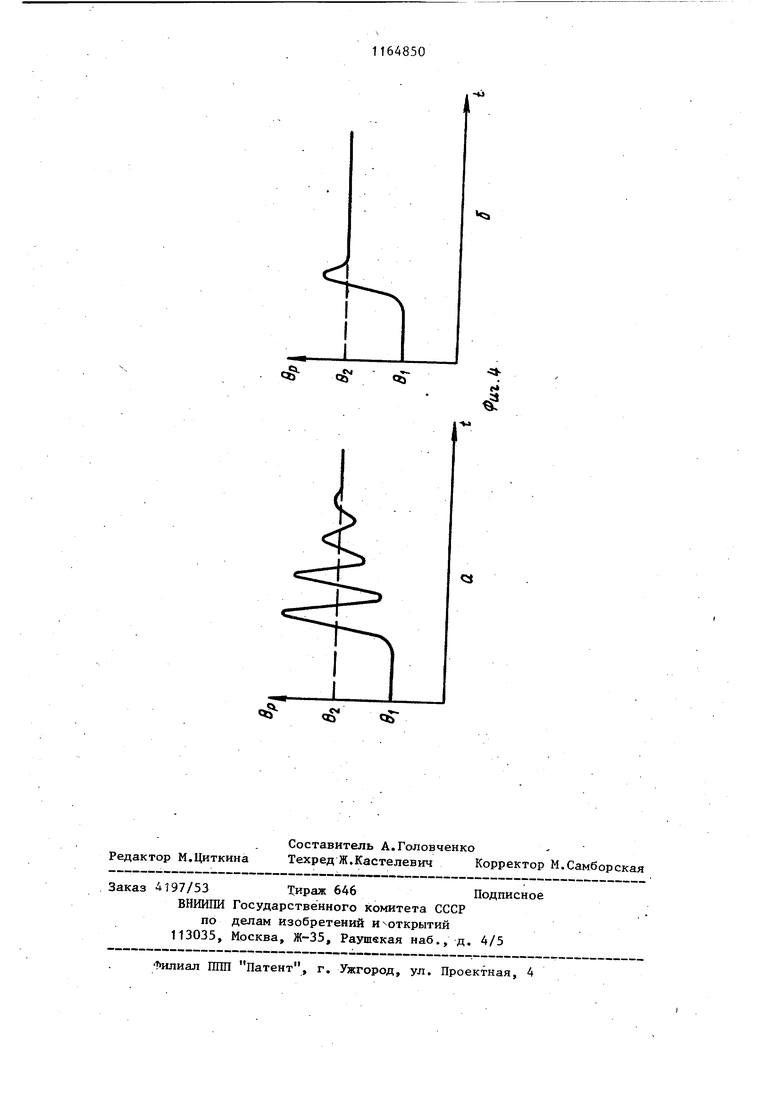
Изобретение откосится к электротехнике, а именно к системам управле ния синхронным электроприводом, и может найти применение в прецизионном электроприводе телеметрическгх устройств, в гироскопических приборах на базе гистерезисного электро двигателя. Использование гистерезисного элек тродвигателя в автономном электропри воде связано с решением двух задач: обеспечение высоких энергетических показателей и стабилизация мгновенной частоты вращения ротора. От решения последней задачи зависит точность записи и воспроизведения в те леметрических устройствах , точность гироскопического прибора и т.д. Известен способ стабилизации мгновенной частоты вращения ротора синхронного гистерезисного электродвигателя, при котором параметричес ки изменяют режим питания электродвигателя путем формирования по цепям статора импульсов напряжения заданной фазы относительно напряжен питания с частотой в 5-10 раз больш частоты собственных качаний ротора электродвигателя р J. К недостаткам данного способа мо но отнести относительно большие эне гетические затраты, поскольку импульсы формируются и р том случае, когда качания ротора электродвигате ля отсутствуют. Постоянно следующие импульсы создают серьезные помехи. Наиболее близким к изобретению является способ стабилизации мгновенной частоты вращения ротора гист резисного электродвигателя, при котором контролируют изменение мгнове ной частоты вращения ротора электро двигателя, выделяют ее низкочастотную составляющую, определяемую собственной частотой качания ротора, и изменяют режим питания электродвига теля с тем, чтобы компенсировать изменение мгновенной частоты вращения ротора 2j. Недостатком данного способа является длительный переходньй процесс стабилизации мгновенной частот вращения ротора. Кроме того, процес демпфирования сопровождается сущест венным изменением параметров питакия (частоты, фазы и амплитуды напр жения) с частотой, равной частоте собственных качаний ротора электродвигателя, что приводит к циркуляции мощности по всем цепям системы источник питания - электродвигатель с соответствующими затратами энергии. Цель изобретения - снижение времени переходного процесса установления заданной частоты вращения и повышение экономичности за счет снижения мощности потерь. Указанная, цель достигается тем, что согласно способу стабилизации мгновенной частоты вращения ротора гистерезисного электродвигателя, при котором контролируют изменение мгновенной частоты вращения ротора, выделяют ее низкочастотную составляющую, определяемую собственной частотой качаний ротора, и изменяют режим питания электродвигателя, контролируют фазу низкочастотной составляющей мгновенной частоты вращения ротора, устанавливают факт превышения нестабильности частоты вращения заданного уровня, по достижению низкочастотной составляющей мгновенной частоты вращения ротора заданного значения измеряют фазу текущего значения напряжения питания и по достижении ею заданного значения увеличивают среднее значение полупериода напряжения питания, по времени совпадающего с заданным значением фазы низкочастотной составляющей мгновенной частоты вращения, повторяют указанные операции с частотой, кратной частоте низкочастотной составляющей мгновенной частоты вращения ротора. На фиг.1 представлена схема устройства, реализующего способ стабилизации мгновенной частоты вращения-; на фиг.2«- временная диаграмма напряжения статора ; на фиг.2 6 - временная диаграмма изменения низкочастотной составляющей мгновенной час- тоты ( il0p ) вращения ротора-, на фиг.З - векторная диаграмма демпфирования качания ротора; на фиг.4с, Б - временные диаграммы эффектив- ности демпфирования качаний ротора. Устройство содержит источник питания 1 с подключенным к нему гистерезисным электродвигателем 2, на валу которого расположен датчик 3 положения ротора. Информационный вьгход источника питания 1 подключен к первому входу блока 4 изменения среднего значения полупериода напряжения питания и к первому входу фазового дискриминатора 5, второй вход которого подключен к датчику 3 положения, а выход через блок 6 выделения низкочастотной составляющей мгновенной частоты вращения ротора соединен с вторым входом блока 4, Второй вход блока 6 подключен к блоку 7 задания минимально допустимого уровня качаний ротора. Выход блока 7 подключен к фазам гистерёзисного электродвигателя 2. Согласно данному способу контроли руют фазу низкочастотной составляющей мгновенной частоты вращения рото ра с помощью датчика 3 положения ротора, устанавливают факт превышения нестабильности частоты вращения заданного уровня, определяемого блоком 7 задания минимально допустимого уровня качаний ротора по достижению низкочастотной составляющей мгновенной частоты вращения ротора, измеряе мой фазовым дискриминатором 5, задан ного значения, измеряют фазу текущего значения напряжения питания и по достижении ею заданного значения увеличивают среднее значение полупериода напряжения питания путем формирования по обмоткам статора импульса напряжения, по времени совпадающего с заданным значением фазы низкочастотной составляющей мгновенной часто ты вращения, повторяют указанные операции с частотой, кратной частоту низкочастотной составляющей мгновенной частоты вращения ротора. Фаза импульса относительно напряжения питания статора оС (фиг.2 а) устанавливается в пределах 120180 эл.град, фаза импульса относител но низкочастотной составляющей ния мгновенной частоты вращения рото ра 1 (фиг.2 б), измеряемая с помощь датчика 3 положения ротора, фазового дискриминатора 5, блока 6 выделения низкочастотной составляющей устанав ливается таким образом, чтобы обеспе чить дискретный перенос условного вектора суммарной намагниченности ро тора Ё из положения максимального отклонения в положение устойчивого равновесия.Частота следования импульсов устанавливается кратной частоте собственных качаний ротора гистерезисного электродвигателя. В установившемся режиме работы в синхронно вращающейся системе коорди- ния нат положение вращающегося поля статора характеризуется суммарным вектором напряжения статора (J , а положение ротора - вектором суммарной намаЁр (фиг.З). Угол между гниченности ними характеризует величину электромагнитного момента электродвигателя. При качаниях ротора электродвигателя вектор Ёр в синхронной системе координат изменяет свое положение. Пусть вектор Ёр перешел из положения Ёр в положение Ер предельного отклонения от положения установившегося режима работы. По способу импульс напряжения обеспечивает перемагничивание ротора таким образом, чтобы за предельно малое время перенести вектор Ёр из положения Ёр в положение При этом теЛо ротора останется неподвижным . Устройство, реализующее способ, работает следующим образом. В фазовом дискриминаторе 5 сравниваются два сигнала: сигнал с датчика 3 положения ротора и опорный сигнал не- точника 1 питания гистерёзисного электродвигателя. В блоке 6 низкочастотная составляющая мгновенной частоты вращения ротора сравнивается с постоянным сигналом блока 7 задания минимально достигнутого уровня качаний ротора. При превьш1ении данного постоянного сигнала блок 6 выдает сигнал на блок 4. Согласно сигналу блока 6 в блоке 4 формируются импульсы напряжения соответствующих параметров, которые прикладываются к обмоткам статора гистерёзисного электродвигателя. Таким образом, использование намагничивающих импульсов обеспечивает режим перевозбуждения, при котором энергетические характеристики наилучшие, снятие импульсов после подавления качаний снимает расходы энергии и дополнительно повьш1ает КПД электропривода. Формирование импульсов в определенной фазе относительно изменения мгновенной частоты вращения ротора электродвигателя является оптимальым режимом демпфирования качаний. Это обеспечивается направленным пеемагничиванием материала ротора. На фиг.4 представлены эксперименальные временные диаграммы изменеугла положения ротора Эр (на
.фиг.401 - по известному способу, на фиг 45 - по предлагаемому способу) . Из приведенных диаграмм видно, что время демпфирования качаний по предлагаемому способу уменьшается в 3-5 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2553446C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2605088C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Способ управления гистерезисным электродвигателем | 1984 |
|
SU1272457A1 |
| Способ контроля входа в синхронизм гистерезисного электродвигателя | 1983 |
|
SU1162013A1 |
| Устройство для измерения мгновенной частоты вращения ротора гистерезисного электродвигателя | 1982 |
|
SU1120243A1 |
| СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ (ВОЗМУЩЕНИЙ) В ГАЗОВЫХ ЦЕНТРИФУГАХ ИЗОТОПНО-РАЗДЕЛИТЕЛЬНОГО КАСКАДА И СИСТЕМА ДИАГНОСТИКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236308C2 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
СПОСОБ СТАБШШЗАЦИИ МГНОВЕННОЙ ЧАСТОТЫ ВРАЫЕНИЯ РОТОРА ГИСТЕРЕЗИСНОГО ЭЛЕКТРОДВИГАТЕЛЯ,при котором контролируют изменение мгновенной частоты вращения ротора, выделяют .ее низкочастотную составляющую, определяемую собственной частотой качаний ротора, и изменяют режим питания электродвигателя, отличающийс я тем, что, с целью снижения времени переходного процесса установления заданной частоты вращения и повышение экономичности за счет снижения мощности потерь, контролируют фазу низкочастотной составляюп(ей мгновенной частоты вращения ротора, устанавливают факт превышения нестабильности частоты вращения заданного уровня, по достижению низкочастотной составляющей мгновенной частоты вращения ротора заданного значения измеряют фазу текущего значения напряжения питания и по достижении ею заданного значения увеличивают среднее значение полупериода напряжения питания, по времени совпадающего с задан(Л ным значением фазы низкочастотной составляющей мгновенной частоты вращения, повторяют указанные операции с частотой, кратной частоте низкочастотной составляющей мгновенной частоты вращения ротсрра. О) 4; 00 СП
Ui
du
бВр
Ра
Фиг.2
Фиг.:5
c
«a
(4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЭЛЕКТРОПРИВОД | 1971 |
|
SU420070A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
