Изобретение относится к области систем автоматического управления и может быть использовано в электрогидравлических следящих приводах (ЭГСП) наведения и стабилизации при отборе мощности непосредственно от вала газотурбинного двигателя (ГТД) "с ограниченной мощностью".
Известны ЭГСП, у которых в качестве первичных источников энергии возможно применение как двигателя внутреннего сгорания (ДВС), так и ГТД.
Однако использование рассмотренных структур ЭГСП, при использовании в качестве приводного двигателя насоса ГТД, при пиковых нагрузках, возникающих при отработке ЭГСП больших сигналов рассогласования (переброски), превышающих или близких к предельным, приводит к механическому разрушению торсионного предохранительного механизма и, как следствие, к выходу из "строя" ГТД.
Ближайшим по технической сущности является ЭГСП, состоящий из последовательно соединенных СКВТ-датчика, вход которого соединен с датчиком скорости задающей оси, СКВТ-приемника, усилителя, гидроусилителя, к выходам которого подключены первый и второй силовые цилиндры, регулирующий орган гидронасоса (люлька), с которым соединен датчик люльки, насос, гидромотор, выход которого соединен с редуктором и датчиком скорости исполнительной оси и через редуктор с объектом регулирования. Нагнетающая и всасывающая полости гидропривода соединены со входами датчиков давления, выходы которых соединены со входом усилителя. С входами усилителя также соединены выходы датчика люльки и выходы датчиков скорости исполнительной оси и задающей оси.
Насос соединен через муфту подключения к валу ГТД, а также с тахогенератором, выход которого соединен с датчиком люльки.
Недостатком прототипа является то, что в ЭГСП при отработке ступенчатых воздействий "перебросок" возникают пиковые нагрузки длительностью 0,2 0,5 с, которые существенно превышают по мощности номинальные значения нагрузок приводного двигателя (ГТД) мобильного объекта, что приводит к преждевременному механическому разрушению торсионного предохранительного механизма и, как следствие, к выходу из "строя" ГТД.
Целью изобретения является повышение надежности привода.
Эта цель достигается тем, что в известный ЭГСП вводятся последовательно соединенные компаратор и регулируемый дроссель, причем вход компаратора подключен к выходу СКВТ- приемника, а выходы регулируемого дросселя подключены ко входам первого и второго силовых цилиндров.
Использование вновь введенных элементов схемы сравнения и регулируемого дросселя, соединенных последовательно, причем вход схемы сравнения подключен к выходу СКВТ- приемника, а выходы регулируемого дросселя подключены ко входам первого и второго силовых цилиндров, обеспечивающих снижение пиковых нагрузок на ГТД при обработке ЭГСП больших сигналов рассогласования неизвестно.
На чертеже представлена структурная схема заявленного ЭГСП.
ЭГСП содержит последовательно соединенные синусно-косинусный вращающийся трансформатор (СКВТ)-датчик 1, вход которого соединен с датчиком скорости задающей оси 2, СКВТ- приемник 3, суммирующий усилитель 4, гидроусилитель 5, к выходам которого подключены регулируемые дроссель 7, связанный с компаратором 6, вход которого соединен с выходом СКВТ-приемника 3, и первый 8 и второй 9 силовые цилиндры, регулирующий орган насоса (люлька) 10, соединенный с датчиком положения люльки 11, насос 12, гидромотор 13, выход которого соединен с редуктором 15 и вторым тахогенератором (датчиком скорости исполнительной оси) 14 и через редуктор с объектом регулирования 16. Нагнетающая и всасывающая полости насоса соединены со входами датчиков давления 17 и 18, выходы которых соединены со входом усилителя 4.
С входами усилителя 4 также соединены выходы датчика люльки 11 и выходы датчиков скорости исполнительной 14 и задающей 2 осей. Насос 12 соединен с первым тахогенератором 19, выход которого соединен с датчиком люльки 11 и через муфту подключения насоса 20 к валу ГТД 21.
ЭГСП работает следующим образом.
При отработке приводом больших сигналов рассогласования, напряжение, пропорциональное ошибке, поступает на входы усилителя 4 и компаратора 6. При ошибке привода, равной или большей заданного уровня, определяемого величиной максимальной допустимой динамической ошибки, Uб≥ U
Предлагаемое изобретение экспериментально проверено в реально действующем ЭГСП, развивающем пиковое значение мощности при "переброске" до 120 квт. Использование предлагаемого изобретения позволило снизить пиковое значение мощности при "переброске" на 20% что позволило обеспечить безотказную работу ЭГСП при работе от ГТД с предельной мощностью 100 квт.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| Устройство для контроля систем автоматического регулирования | 1978 |
|
SU1841197A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
Изобретение относится к области систем автоматического управления. Цель - повышение надежности привода. Электрогидравлический следящий привод содержит синусно-косинусный вращающий трансформатор-датчик, кинематически связанный с задающей осью и датчиком скорости данной оси, синусно-косинусный вращающий трансформатор-приемник, суммирующий усилитель и гидроусилитель, первый и второй силовые цилиндры с регулирующим органом гидронасоса, выход которого соединен с соответствующим датчиком положения люльки, подключенным входом и выходом соответственно к выходу первого тахогенератора и второму входу суммирующего усилителя, и через насос, нагнетающая и всасывающая полости которого соединены с датчиками давления, - с гидромотором, выходной вал которого кинематически связан с исполнительной осью и вторым тахогенератором, соединенным выходом с третьим входом суммирующего усилителя, четвертый и пятый входы которого подключены к выходам датчиков давления, а шестой - к выходу датчика скорости задающей оси, причем вал насоса кинематически связан через муфту с валом газотурбинного двигателя, а также подключенный входом к выходу синусно-косинусного вращающего трансформатора-приемника, и регулируемый дроссель, соединенный выходами со входами первого и второго силовых цилиндров. 1 ил.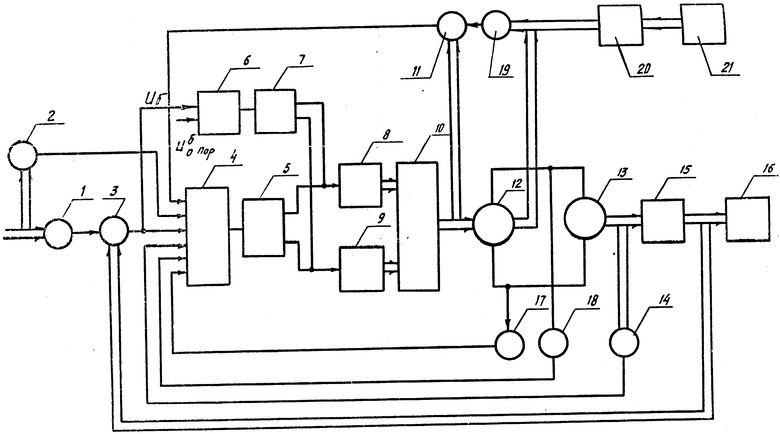
Электрогидравлический следящий привод, содержащий включенные последовательно синусно-косинусный вращающийся трансформатор-датчик, кинематически связанный с задающей осью и датчиком скорости данной оси, синусно-косинусный вращающийся трансформатор-приемник, кинематически связанный с исполнительной осью, суммирующий усилитель и гидроусилитель, соединенный выходами через первый и второй силовые цилиндры с регулирующим органом гидронасоса, выход которого соединен с соответствующим датчиком положения, подключенным входом и выходом соответственно к выходу первого тахогенератора и второму входу суммирующего усилителя и, через насос, нагнетающая и всасывающая полости которого соединены с датчиками давления, с гидромотором, выходной вал которого кинематически связан с исполнительной осью и вторым тахогенератором, соединенным выходом с третьим входом суммирующего усилителя, четвертый и пятый входы которого подключены к выходам датчиков давления, а шестой к выходу датчика скорости задающей оси, причем вал насоса кинематически связан через муфту с валом газотурбинного двигателя, отличающееся тем, что, с целью повышения надежности привода, он содержит включенные последовательно компаратор, подключенный входом к выходу синусно-косинусного вращающегося трансформатора приемника, и регулируемый дроссель, соединенный выходами с входами первого и второго силовых цилиндров.
| Прокофьев В.Н | |||
| и др | |||
| Проектирование и расчет автономных приводов | |||
| - М.: Машиностроение, 1978, с | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
