Изобретение относится к области машиностроения и может быть использовано в регулируемых объемно-замкнутых электрогидравлических приводах.
Известен регулируемый электрогидравлический привод с замкнутой схемой циркуляции рабочей жидкости (Под. ред. Прокофьева, В.Н. Аксиально-поршневой регулируемый гидропривод. М.: Машиностроение, 1969 г., стр.257). В данном приводе используются объемно-замкнутые между собой аксиально-поршневые гидромашины с наклонным блоком цилиндров и двойным несиловым карданом. Насос переменной подачи приводится в действие приводным электродвигателем, а управление насосом осуществляется посредством электрогидравлического механизма управления с внутренней механической обратной связью по положению люльки насоса. Электрический вход механизма управления является управляющим входом гидропривода.
Недостатком этого привода является наличие в насосе внутренней обратной связи по положению его люльки и находящегося в ней блока цилиндров, имеющих большой момент инерции, что отрицательно сказывается на КПД привода при отработке быстро меняющихся управляющих воздействий.
Известен объемно-замкнутый гидропривод нераздельного исполнения АЮИЖ. 303379.013 РЭ (ОАО «ВНИИ «Сигнал», г. Ковров, 2004 г.), принятый за прототип. Данный гидропривод содержит гидравлически замкнутые между собой аксиально-поршневой гидромотор с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями и регулируемый аксиально-поршневой насос с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями, и с механическим механизмом управления, приводной двигатель, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, при этом напорная гидролиния вспомогательного насоса соединена с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос и гидромотор, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса, вход вспомогательного насоса соединен с пополнительным баком, корпусы механизма управления, насоса с гидромотором и выход предохранительного клапана соединены со входом вспомогательного насоса, вал приводного двигателя кинематически соединен с входными валами регулируемого и вспомогательного насосов.
Недостатками данного гидропривода являются высокие гидромеханические потери и высокие утечки, что отрицательно сказывается на величине КПД гидропривода, на значении минимальных стабильных частот вращения вала гидромотора.
Целью изобретения является повышение КПД электрогидропривода и, как следствие, уменьшение стабильной частоты вращения вала гидромотора.
Технический результат достигается тем, что в электрогидравлический привод, содержащий гидравлически замкнутые между собой аксиально-поршневой гидромотор с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями (гидромотор) и регулируемый аксиально-поршневой насос с наклонным диском и гидростатическими опорами с поршнями (регулируемый насос) и с механизмом управления, приводной двигатель, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, при этом напорная гидролиния вспомогательного насоса соединена с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос и гидромотор, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса, вход вспомогательного насоса соединен с пополнительным баком, корпусы механизма управления, насоса с гидромотором и выход предохранительного клапана соединены со входом вспомогательного насоса, вал приводного двигателя кинематически соединен с входными валами регулируемого и вспомогательного насосов, введены датчик угла наклонного диска регулируемого насоса, сумматор, обратный клапан, гидравлический аккумулятор, при этом механизм управления регулируемого насоса выполнен электрогидравлическим, а датчик угла кинематически соединен с наклонным диском регулируемого насоса и своим электрическим выходом соединен со вторым входом сумматора, первый вход которого является управляющим входом привода Uупр, выход сумматора соединен с электрическим входом электрогидравлического механизма управления, напорная гидролиния вспомогательного насоса через обратный клапан соединена с гидравлическим аккумулятором и гидравлическим входом электрогидравлического механизма управления, а усилие R пружины, поджимающей блок цилиндров к распределителю в гидромоторе, отвечает соотношению:
 ,
,
где
mц - масса блока цилиндров (без поршней);
a 0 - проекция вибрационного ускорения на ось вала гидромотора;
g0 - проекция ускорения свободного падения на ось вала гидромотора;
z - количество поршней и гидростатических опор в гидромоторе;
mп - масса одного поршня с гидростатической опорой;
a п0 - проекция вибрационного ускорения на плоскость, перпендикулярную оси вала гидромотора;
gп0 - проекция ускорения свободного падения на плоскость, перпендикулярную оси вала гидромотора;
l1 - расстояние от центра тяжести блока цилиндров, поршней с гидростатическими опорами до его точки самоустановки;
Dц - внешний диаметр блока цилиндров, взаимодействующий с распределителем;
σp - удельное давление между блоком цилиндров и распределителем;
Sp - площадь контакта блока цилиндров и распределителя.
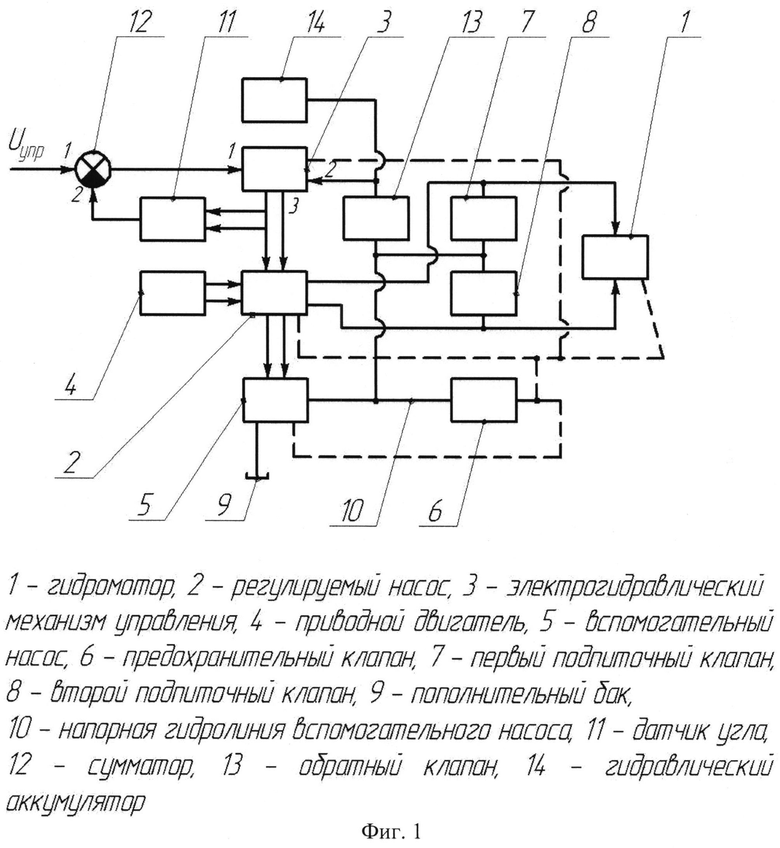
На фиг.1 приведена упрощенная структурная схема электрогидравлического привода, на фиг.2 - электрогидравлический привод с аксиально-поршневыми гидромашинами с наклонным диском и гидростатическими опорами (электрогидравлический механизм управления не показан).
Электрогидравлический привод (фиг.1) содержит гидравлически замкнутые между собой гидромотор 1 и регулируемый насос 2 с механизмом управления 3, приводной двигатель 4, вспомогательный насос 5, предохранительный клапан 6, первый 7 и второй 8 подпиточные клапаны, пополнительный бак 9, при этом напорная гидролиния 10 вспомогательного насоса 5 соединена с входами первого 7 и второго 8 подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый насос 2 и гидромотор 1, вход предохранительного клапана 6 соединен с напорной гидролинией 10 вспомогательного насоса 5, вход которого соединен с пополнительным баком 9, выход предохранительного клапана 6, корпусы механизма управления 3, регулируемого насоса 2 с гидромотором 1 и выход предохранительного клапана 6 соединены с входом вспомогательного насоса 5, при этом механизм управления 3 регулируемого насоса 2 выполнен электрогидравлическим, а датчик угла 11 кинематически соединен с наклонным диском 15 (фиг.2) регулируемого насоса 2 и своим электрическим выходом соединен со вторым входом сумматора 12 (фиг.1), первый вход которого является управляющим входом электрогидравлического привода, выход сумматора 12 соединен с электрическим входом электрогидравлического механизма управления 3, напорная гидролиния 10 вспомогательного насоса 5 через обратный клапан 13 соединена с гидравлическим аккумулятором 14 и с гидравлическим входом электрогидравлического механизма управления 3, а усилие R пружины 16 (фиг.2), поджимающей блок цилиндров 17 к распределителю 18 в гидромоторе 1, отвечает соотношению:
,
где
mц - масса блока цилиндров 17 (без поршней 19);
a 0 - проекция вибрационного ускорения на ось вала 20 гидромотора 1;
g0 - проекция ускорения свободного падения на ось вала 20 гидромотора 1;
z - количество поршней 19 и гидростатических опор 21 в гидромоторе 1;
mп - масса одного поршня 19 с гидростатической опорой 21;
a п0 - проекция вибрационного ускорения на плоскость, перпендикулярную оси вала 20 гидромотора 1;
gп0 - проекция ускорения свободного падения на плоскость, перпендикулярную оси вала гидромотора 1;
l1 - расстояние от центра тяжести блока цилиндров 17, поршней 19 с гидростатическими опорами 21 до его точки самоустановки;
Dц - внешний диаметр блока цилиндров 17, взаимодействующий с распределителем 18;
σp - удельное давление между блоком цилиндров 17 и распределителем 18;
Sp - площадь контакта блока цилиндров 17 и распределителя 18.
Вал приводного двигателя 4 кинематически соединен с валом 22 регулируемого насоса 2 и с валом 23 вспомогательного насоса 5. Вал 20 гидромотора 1 соединен с объектом регулирования.
Электрогидравлический привод работает следующим образом. При отсутствии управляющего сигнала на первом входе сумматора 12 (фиг.1) соответственно отсутствует сигнал на электрическом входе электрогидравлического механизма управления 3. Наклонный диск 15 (фиг.2) регулируемого насоса 2 находится в нулевом, нейтральном положении. Приводной двигатель 4 вращает вал 22 насоса 2 и вал 23 вспомогательного насоса 5. Вспомогательный насос 5 (фиг.1) подает рабочую жидкость по напорной гидролинии 10 на входы подпиточных клапанов 7 и 8 и через них в магистрали, соединяющие регулируемый насос 2 и гидромотор 1, на вход предохранительного клапана 6, на входы обратного клапана 13 и гидравлического аккумулятора 14 и на гидравлический вход электрогидравлического механизма управления 3. Таким образом, обеспечивается давление подпитки в магистралях, соединяющих регулируемый насос 2 и гидромотор 1, заполнение гидравлического аккумулятора 14 и давление питания электрогидравлического механизма управления 3. При нулевом нейтральном положении наклонного диска 15 (фиг.2) регулируемый насос 2 подачу не производит и вал 20 гидромотора 1 не вращается.
После подачи на первый вход сумматора 12 (фиг.1) управляющего сигнала для электрогидравлического привода Uупр, на второй вход сумматора 12 поступает сигнал с датчика угла 11, образуя отрицательную обратную связь электрогидравлического привода. Сигнал с выхода сумматора 12 поступает на электрический вход электрогидравлического механизма управления 3. Таким образом, на электрическом входе электрогидравлического механизма управления 3 формируется управляющий сигнал, определяющий положение наклонного диска 15 регулируемого насоса 2.
Регулируемый насос 2, пропорционально положению наклонного диска 15, подает жидкость в одну из магистралей, при этом, например, первый подпиточный клапан 7 прикрывается, а второй подпиточный клапан 8 приоткрывается, открывая путь большему потоку жидкости. В гидромоторе 1 блок цилиндров 17 (фиг.2) через накладной диск поджимается к распределителю 18. Усилие поджатая блока цилиндров 17 к распределителю 18 определяет величину момента сопротивления вращению вала 20 гидромотора 1.
Предложенное в заявке на изобретение усилие R обеспечивает уменьшение перепада давления страгивания и, следовательно, величины утечек, что способствует также уменьшению начальной величины стабильной частоты вращения вала 20 гидромотора 1.
При вращении вала 20 гидромотора 1 рабочая жидкость возвращается в регулируемый насос 2, при этом подпиточные клапаны 7 и 8 (фиг.1) обеспечивают в магистралях давление подпитки.
Для обеспечения точности отработки электрогидравлическим механизмом управления 3 сигналов большой амплитуды, частоты или работы при значительном колебании частоты вращения вала приводного двигателя 4 необходимо стабильное давление питания электрогидравлического механизма управления 3. Для уменьшения потерь гидравлической мощности вспомогательного насоса 5 и, следовательно, повышения КПД электрогидравлического привода, питание электрогидравлического механизма 3 от вспомогательного насоса 5 осуществляется через обратный клапан 13 и с помощью гидравлического аккумулятора 14.
Уменьшение минимальной стабильной частоты вращения вала 20 гидромотора 1 способствует улучшению плавности работы, чувствительности, увеличению диапазона регулирования электрогидравлического привода, при его высоком КПД.
Уменьшение гидромеханических (перепад давления страгивания в гидромоторе) и объемных (величина утечек) потерь приводит как к уменьшению суммарных потерь и повышению коэффициента полезного действия (КПД), так и к расширению зоны максимального КПД, с расширением ее в том числе в сторону меньших частот вращения. В связи с увеличением КПД уменьшаются тепловыделения и улучшается тепловое состояние электрогидравлического привода.
В ОАО «ВНИИ «Сигнал» проведены испытания электрогидравлического привода с гидромашинами с рабочим объемом 112 см3/об с предлагаемыми в формуле изобретения техническими решениями. При этом получена минимальная стабильная частота вращения - 20 об/мин (1/3 об/сек). Точность стабилизации частоты вращения предлагаемого электрогидравлического привода составила ±4,5%. Минимальная стабильная частота вращения прототипа составляет не менее 180 об/мин.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554153C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2015 |
|
RU2593325C1 |
| Электрогидравлический привод | 2019 |
|
RU2708012C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2017 |
|
RU2646169C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2688783C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2008 |
|
RU2372531C1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2017 |
|
RU2651376C1 |
| ГИДРОПРИВОД | 2004 |
|
RU2278310C1 |

Привод может быть использован в регулируемых объемно-замкнутых электрогидравлических приводах. В привод введены датчик угла наклонного диска регулируемого аксиально-поршневого насоса с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями, сумматор, обратный клапан, гидравлический аккумулятор, при этом механизм управления насоса выполнен электрогидравлическим, а датчик угла кинематически соединен с наклонным диском и своим электрическим выходом соединен со вторым входом сумматора, первый вход которого является управляющим входом привода, выход сумматора соединен с электрическим входом механизма управления, напорная гидролиния вспомогательного насоса через обратный клапан соединена с гидравлическим аккумулятором и гидравлическим входом механизма управления. Технический результат - повышение КПД электрогидропривода и уменьшение стабильной частоты вращения вала гидромотора. 2 ил.
Электрогидравлический привод, содержащий гидравлически замкнутые между собой аксиально-поршневой гидромотор с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями и регулируемый аксиально-поршневой насос с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями и с механизмом управления, приводной двигатель, вспомогательный насос, предохранительный клапан, первый и второй подпиточные клапаны, пополнительный бак, при этом напорная гидролиния вспомогательного насоса соединена с гидравлическим входом механизма управления и с входами первого и второго подпиточных клапанов, выходы которых соединены с магистралями, соединяющими регулируемый аксиально-поршневой насос с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями и аксиально-поршневой гидромотор с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями, вход предохранительного клапана соединен с напорной гидролинией вспомогательного насоса, вход вспомогательного насоса соединен с пополнительным баком, корпусы механизма управления, регулируемого аксиально-поршневого насоса с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями с аксиально-поршневым гидромотором с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями и выход предохранительного клапана соединены с входом вспомогательного насоса, вал приводного двигателя кинематически соединен с входными валами регулируемого аксиально-поршневого насоса с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями и вспомогательного насоса, отличающийся тем, что в него введены датчик угла наклонного диска регулируемого аксиально-поршневого насоса с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями, сумматор, обратный клапан, гидравлический аккумулятор, при этом механизм управления регулируемого аксиально-поршневого насоса с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями выполнен электрогидравлическим, а датчик угла кинематически соединен с наклонным диском и своим электрическим выходом соединен со вторым входом сумматора, первый вход которого является управляющим входом электрогидравлического привода, выход сумматора соединен с электрическим входом электрогидравлического механизма управления, напорная гидролиния вспомогательного насоса через обратный клапан соединена с гидравлическим аккумулятором и гидравлическим входом электрогидравлического механизма управления, а усилие R пружины, поджимающей блок цилиндров к распределителю в аксиально-поршневом гидромоторе с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями, отвечает соотношению:
,
где mц - масса блока цилиндров (без поршней);
a
0 - проекция вибрационного ускорения на ось вала аксиально-поршневого гидромотора с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями;
g0 - проекция ускорения свободного падения на ось вала аксиально-поршневого гидромотора с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями;
z - количество поршней и гидростатических опор в аксиально-поршневом гидромоторе с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями;
mп - масса одного поршня с гидростатической опорой;
a
п0 - проекция вибрационного ускорения на плоскость, перпендикулярную оси вала аксиально-поршневого гидромотора с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями;
gп0 - проекция ускорения свободного падения на плоскость, перпендикулярную оси вала аксиально-поршневого гидромотора с наклонным диском и контактирующими с ним гидростатическими опорами с поршнями;
l1 - расстояние от центра тяжести блока цилиндров, поршней с гидростатическими опорами до его точки самоустановки;
Dц - внешний диаметр блока цилиндров, взаимодействующий с распределителем;
σp - удельное давление между блоком цилиндров и распределителем;
Sp - площадь контакта блока цилиндров и распределителя.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| US 5431182 A, 11.07.1995 | |||
| US 6512960 B1, 28.01.2003 | |||

