СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ НЕЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ
Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве измерительных преобразователей неэлектрических величин типа датчиков угловых скоростей, датчиков линейных, угловых ускорений, феррозондов, электромагнитных, электростатических подвесов и т.д.
Известен способ измерения физических неэлектрических величин [Г.П. Нуберт, // Измерительные преобразователи неэлектрических величин //, Л.: Энергия, 1970, с. 6] согласно которому производят преобразование физической неэлектрической величины в электрический сигнал, пропорциональный измеряемой физической величине, измеряют преобразованный сигнал. Затем рассчитывают по известным соотношениям между входной физической неэлектрической величиной и выходным сигналом значение входной физической неэлектрической величины.
В качестве примера может быть приведен способ измерения угла разворота объекта (физическая неэлектрическая величина) по значению выходного сигнала датчика угла.
Недостатком способа является малая точность. Указанный недостаток обусловлен тем, что соотношение в датчике между входным и выходным параметрами, зависит от методики калибровки, от условий окружающей среды, качества материалов датчика.
Известен также способ измерения физических неэлектрических величин [Г.П. Нуберт // Измерительные преобразователи неэлектрических величин // Л.: Энергия, 1970, с. 7], который принимается за прототип. Согласно способу, измеряемую физическую величину преобразуют в переменный электрический сигнал, амплитуда которого пропорциональна физической величине, после чего осуществляют выпрямление переменного сигнала с помощью детектора, состоящего, например, из двух диодов. Для уменьшения размеров детектора диоды устанавливают в корпусе микросборки из «n» диодов. Полученный постоянный сигнал усиливают и преобразуют в физическую величину, компенсирующую (уравновешивающую) измеряемую физическую величину, при этом величина постоянного сигнала является мерой измеряемой физической величины.
Способ может быть пояснен на примере способа измерения углового ускорения [Г.П. Нуберт // Измерительные преобразователи неэлектрических величин // Л.: Энергия, 1970, с. 346-348]. При развороте основания с датчиком на чувствительный элемент датчика (крыльчатку) действует момент, который разворачивает крыльчатку вокруг оси подвеса, угол разворота с помощью датчика угла преобразуется в переменный сигнал, амплитуда которого пропорциональна действующему ускорению. Затем осуществляют выпрямление сигнала с помощью детектора выполненного на диодах. Выпрямленный сигнал усиливают и подают на датчик момента. Датчик момента преобразует электрический сигнал в момент, который прикладывается к крыльчатке и уравновешивает (компенсирует) момент от действующего ускорения. При равенстве моментов осуществляют измерение постоянного сигнала в цепи датчика момента, пропорционального действующему ускорению.
Недостатком способа является малая точность. Указанный недостаток обусловлен наличием в выходном сигнале составляющей, обусловленной изменением температуры окружающей среды. Наиболее чувствительным к изменениям температуры элементом в схеме измерения является детектор. При изменении температуры происходит изменение параметров его диодов [М.И. Ингберман и др. // Термостатирование в технике связи // М.: Связь, с. 101-103]. Решение проблемы возможно за счет за счет размещения всего устройства в термостабилизированном объеме, однако это решение неприемлемо по причине ограниченного объема, в котором оно должно размещаться.
Задачей настоящего изобретения является совершенствование способа измерения физической неэлектрической величины.
Достигаемый технический результат - повышение точности измерения физической неэлектрической величины.
Поставленная задача решается тем, что в известном способе измерения физической неэлектрической величины, согласно которому преобразуют измеряемую физическую величину в переменный электрический сигнал, амплитуда которого пропорциональна физической величине, после чего осуществляют выпрямление сигнала с помощью детектора, выполненного на двух диодах, расположенных в корпусе микросборки из «n» диодов, полученный постоянный сигнал усиливают и преобразуют в физическую величину, компенсирующую измеряемую физическую величину, при этом величина постоянного сигнала является мерой измеряемой физической величины, третий диод микросборки используют в качестве датчика температуры, сигналом которого управляют током, протекающим через остальные последовательно соединенные «n-3» диода микросборки, обеспечивая при этом термостабилизацию внутри корпуса микросборки.
Способ может быть пояснен на примере приведенного выше способа измерения углового ускорения объекта.
При действии углового ускорения (измеряемая физическая неэлектрическая величина) на чувствительный элемент датчика (крыльчатку) создается вращающий момент. Под действием момента крыльчатка разворачивается вокруг оси. Угол разворота с помощью датчика угла преобразуют в переменный электрический сигнал. Затем осуществляют выпрямление сигнала с помощью детектора, выполненного на 2 диодах, размещенных в корпусе микросборки из «n» диодов. Два диода позволяют организовать двухполупериодное выпрямление сигнала, более точное, чем на одном диоде (однополупериодное). Размещение диодов в едином корпусе микросборки, например диодной матрице 2ДС 627А, содержащей 8 диодов [// Справочник Полупроводниковые приборы. Диоды выпрямительные, стабилитроны, тиристоры // под редакцией А.В. Голомедова, М.: Радио и связь, 1988] экономит отведенное для устройства пространство.
При этом с целью исключения влияния изменений температуры окружающей среды осуществляют термостабилизацию диодов детектора. Для этого корпус микросборки, в котором размещены диоды детектора, используют как корпус термостабилизированного объема (корпус термостата), третий диод микросборки используют, как датчик температуры. Сигналом которого управляют током, протекающим через цепочку остальных последовательно соединенных «n-3» диодов микросборки, выполняющих роль нагревателя.
Выпрямленный детектором сигнал усиливают и подают на датчик момента. Датчик момента преобразует электрический сигнал в момент, который прикладывают к крыльчатке и уравновешивают момент от действующего ускорения. При равенствемоментов осуществляют измерение сигнала в цепи датчика момента, пропорционального действующему ускорению.
При этом точность измерения ускорения (физической неэлектрической величины) повышается за счет исключения из результатов измерения составляющей обусловленной изменением температуры окружающей среды. На фиг. 1, в качестве примера, приведены полученные авторами экспериментальные зависимости выходного сигнала U детектора от изменения температуры Т окружающей среды: 1 - при реализации способа взятого за прототип, 2 - при реализации предлагаемого способа.
Авторы приводят пример практически реализованной ими схемы температурной стабилизации диодной микросборки феррозондового магнитометра. Схема приведена на фиг. 2.
На фиг. 2 приняты следующие обозначения:
DA1, R1, R2, Я3 - диод и резисторы мостовой схемы;
DA2-DA6 - диоды, образующие цепь нагревателя;
МК - микросхема;
Т - транзистор;
+Uп,-Uп - клеммы для подключения питания схемы;
R4, Cl, С2, С3 - корректирующие элементы микросхемы;
R5 - ограничительное сопротивление в цепи нагревателя.
Работа схемы происходит следующим образом. При изменении (например, увеличении) температуры корпуса микросборки изменяется (увеличивается) температура диода DA1, соответственно изменяется его сопротивление, происходит разбалансировка мостовой схемы DA1, R1, R2, R3, настроенной на заданную (рабочую) температуру. На основе сигнала разбалансировки моста с помощью микросхемы МК формируется сигнал управления транзистором Т, регулирующим (в данном случае, уменьшающим) ток, протекающий через диоды DA2-DA6. Использование данного решения позволило по сравнению с другими известными решениями уменьшить габариты и повысить точность феррозондового магнитометра. В настоящее время на предприятии разрабатывается документация для внедрения данного устройства в производство.
На предприятии предлагаемый способ используется также при разработках измерительных преобразователей неэлектрических величин типа датчиков угловых скоростей, датчиков перемещений в электростатических подвесах гироскопов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА УГЛА ФАЗОВОГО СДВИГА МЕЖДУ НАПРЯЖЕНИЕМ И ТОКОМ | 2011 |
|
RU2492572C2 |
| СПОСОБ МЕХАНИЧЕСКОЙ ОБРАБОТКИ НЕЖЕСТКИХ ОСЕСИММЕТРИЧНЫХ ДЕТАЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2130360C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОГО ТОКА В ПРОВОДНИКЕ И ИНДИКАТОРНАЯ СИСТЕМА, СОДЕРЖАЩАЯ ТАКОЙ ДАТЧИК | 2007 |
|
RU2444019C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН | 2009 |
|
RU2393486C1 |
| Устройство для измерения знакопеременных перепадов давлений и перегрузок | 1973 |
|
SU549701A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ В ДЕЙСТВУЮЩИХ НЕФТЕГАЗОВЫХ СКВАЖИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260692C2 |
| ДАТЧИК УГЛОВ НАКЛОНА ОБЪЕКТА | 2007 |
|
RU2330241C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
Изобретение относится к области приборостроения и может быть использовано при разработке и производстве измерительных преобразователей неэлектрических величин типа датчиков угловых скоростей, датчиков линейных, угловых ускорений и т.д. Согласно заявленному изобретению преобразуют измеряемую физическую величину в переменный электрический сигнал, амплитуда которого пропорциональна физической величине. Осуществляют выпрямление сигнала с помощью детектора, выполненного на двух диодах, расположенных в корпусе микросборки из «n» диодов. Полученный постоянный сигнал усиливают и преобразуют в физическую величину, компенсирующую измеряемую физическую величину. При этом величина постоянного сигнала является мерой измеряемой физической величины. Третий диод микросборки используют в качестве датчика температуры, сигналом которого управляют током, протекающим через остальные последовательно соединенные «n-3» диода микросборки, обеспечивая при этом термостабилизацию внутри корпуса микросборки. Технический результат - повышение точности измерения физической неэлектрической величины за счет исключения из результатов измерения составляющей, обусловленной изменением температуры окружающей среды. 2 ил.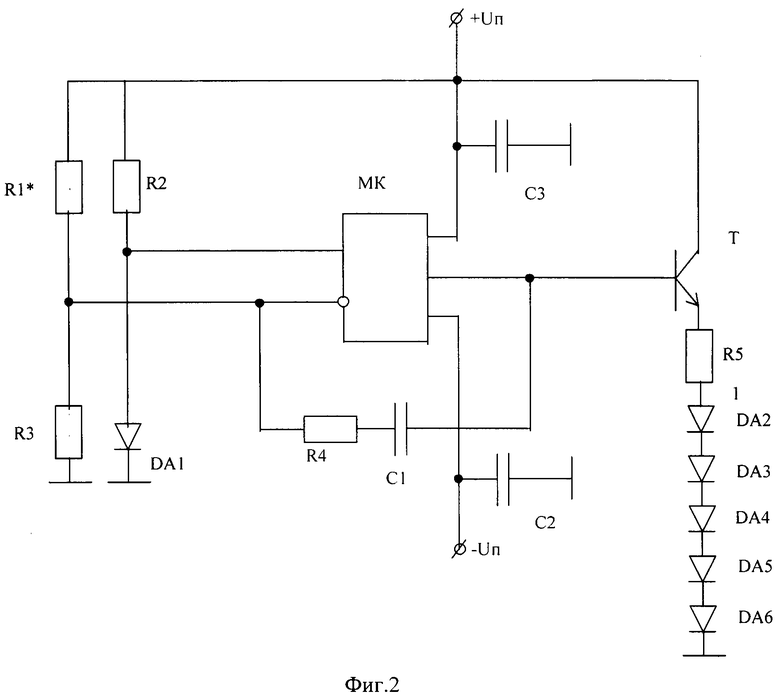
Способ измерения физической неэлектрической величины, согласно которому преобразуют измеряемую физическую величину в переменный электрический сигнал, амплитуда которого пропорциональна физической величине, после чего осуществляют выпрямление сигнала с помощью детектора, выполненного на двух диодах, расположенных в корпусе микросборки из «n» диодов, полученный постоянный сигнал усиливают и преобразуют в физическую величину, компенсирующую измеряемую физическую величину, при этом величина постоянного сигнала является мерой измеряемой физической величины, отличающийся тем, что третий диод микросборки используют в качестве датчика температуры, сигнал датчика температуры управляется током, протекающим через остальные «n-3» последовательно соединенные диоды микросборки, обеспечивая при этом термостабилизацию внутри ее корпуса.
| Нуберт Г.П., "Измерительные преобразователи неэлектрических величин", Л.:Энергия, 1970, стр.7 | |||
| US 6959583 B2, 01.11.2005 | |||
| US 5361637 A1, 08.11.1994 | |||
| US 5806364 A, 15.09.1998 | |||
| UD 5677485 A, 14.10.1997 |

