Изобретение относится к измерительной технике, а именно к способам управления чувствительными элементами (ЧЭ), содержащим датчик момента, датчик угла и обмотку возбуждения, которые используются для измерения механических величин, например ускорения или угловой скорости.
Известен способ управления ЧЭ, реализованный в устройстве (см. Д.А.Берендс и др. Приборы и системы автоматического управления с широтно-импульсной модуляцией. - Л.: Машиностроение, 1982, рис.62 и 151). Согласно данному способу возбуждают переменным синусоидальным напряжением с частотой Fв датчик угла ЧЭ, а выходное переменное напряжение датчика угла усиливают по амплитуде, затем подвергают фазовому выпрямлению и усредняют, в результате чего получают постояное напряжение, которое складывают с опорным напряжением Uo, результат сложения преобразуют в длительность импульса (ШИМ-преобразование), который имеет постоянный период повторения, после чего с помощью импульса переключают направление протекания стабилизированного тока в датчике момента ЧЭ, длительность импульса затем преобразуют в цифровой код, который является результатом измерения.
Недостатком такого способа является то, что нестабильность опорного сигнала Uo прямо влияет на точность измерения. Также наличие фазового выпрямления, при котором переключают с частотой Fв выходной сигнал датчика угла на входах усилителя таким образом, что на выходе усилителя образуют положительные волны синусоидального сигнала, возникает погрешность преобразования, связанная с нестабильностью фазы сигнала датчика угла и с неидеальностью процесса переключения.
Известен способ управления ЧЭ, реализованный в устройстве (см. там же, рис.67). Согласно этого способа возбуждают датчик угла переменным синусоидальным напряжением, выходное переменное напряжение датчика угла усиливают, затем складывают с постоянным напряжением Uo, после чего запоминают то значение суммарного напряжения, которое соответствует максимуму напряжения возбуждения, запомненное напряжение преобразуют затем в длительность импульса, который имеет постоянный период повторения, после чего с помощью импульса переключают направление протекания стабилизированного тока в датчике момента ЧЭ, длительность импульса также преобразуют затем в цифровой код, который является результатом измерения.
Недостатком данного способа является наличие большой погрешности измерения, связанной с нестабильностью напряжения Uo и с неточностью определения максимума в сигнале возбуждения.
Известен способ управления ЧЭ, реализованный в устройстве (см. там же, рис.79), в котором, в отличие от предыдущего способа, датчик угла возбуждают прямоугольными импульсами тока. При этом увеличивают рабочий диапазон измерения, однако при этом увеличивают коэффициент усиления прямой цепи измерения, что приводит к ее неустойчивости, которую исключают введением дополнительной обратной связи. Кроме того, выходной сигнал датчика угла при этом не имеет вид синусоиды (см. там же, рис.76), для формирования данного сигнала вводят дополнительные RC-элементы, вносящие нестабильность в форму сигнала и повышающие погрешность измерения.
Известен способ управления ЧЭ, взятый за прототип и реализованный в устройстве (см. там же, рис.150). Согласно данному способу возбуждают датчик угла ЧЭ переменным синусоидальным сигналом с периодом повторения Тв, а выходное переменное напряжение датчика угла усиливают по амплитуде, затем подвергают фазовому выпрямлению и усреднению, в результате чего получают постоянное напряжение, которое преобразуют в ток, протекающий через датчик момента ЧЭ, величину данного тока преобразуют в цифровой код, который является результатом измерения. При этом датчик момента создает в ЧЭ момент силы, который равен моменту силы, действующему на ЧЭ со стороны измеряемой величины.
В этом способе отсутствует погрешность, связанная с нестабильностью опорного напряжения Uo, как это имеет место в описанных выше способах. Однако присутствуют значительные погрешности измерения, связанные с нестабильностью фазового выпрямления, которые обусловлены нестабильностью фазы сигнала датчика угла относительно периода Тв, утечками закрытых ключей, конечным сопротивлением открытых ключей, значительным временем открывания и закрывания ключей, которые используют для преобразования синусоидального сигнала датчика угла в положительные полуволны.
Заявленное изобретение решает задачу создания более точного способа управления чувствительным элементом.
Для решения поставленной задачи в способ управления ЧЭ, согласно которому возбуждают датчик угла ЧЭ переменным синусоидальным напряжением, преобразуют постоянное напряжение в ток, протекающий через датчик момента ЧЭ, величину данного тока преобразуют в цифровой код, который является результатом измерения, введена последовательность действий, согласно которой выпрямляют, а затем усредняют напряжение возбуждения датчика угла, суммируют между собой переменные напряжения возбуждения датчика угла и выхода датчика угла, выпрямляют и усредняют результат суммирования, который вычитают из усредненного напряжения возбуждения, результат вычитания интегрируют, образуя постоянное напряжение.
Техническим результатом заявляемого изобретения является снижение погрешности измерения механической величины, которая при этом определяется в основном погрешностью ЧЭ.
Сущность изобретения поясняется чертежом, где показана функциональная схема устройства, реализующего заявляемый способ.
Как показано на чертеже, устройство состоит из ЧЭ 1, в котором имеются датчик момента 2, обмотки возбуждения 3, датчик угла 4, из генератора возбуждения 5, сумматора 6, выпрямителей 7 и 8, интегратора 12, усреднителей 9 и 10, вычитателя 11, АЦП 13 и образцового резистора 14 (Ro). При этом выход генератора 5 подключен к входу сумматора 6, ко входу выпрямителя 8 и к обмотке возбуждения 3, выход датчика угла 4 соединен с другим входом сумматора 6, выход которого подключен через последовательно соединенные выпрямитель 7 и усреднитель 9 к отрицательному входу вычитателя 11, выход выпрямителя 8 через усреднитель 10 подключен к положительному входу сумматора 11, выход которого через последовательно соединенные интегратор 12 и датчик момента 2 подключен к резистору 14 и ко входу АЦП 13, выход которого является выходом устройства, а другой электрод резистора 14 соединен с общим проводом.
Работа происходит следующим образом. С помощью генератора 5 создают синусоидальное напряжение, которым возбуждают обмотку 3 ЧЭ 1. На выходе датчика угла 4 при этом появляется выходной переменный сигнал, амплитуда и фаза которого характеризуют величину и знак отклонения датчика угла из нулевого положения. В сумматоре 6 складывают выходные напряжения датчика угла 4 и генератора 5. Блоки 7 и 8 выпрямляют переменные напряжения, поступающие соответственно с выхода сумматора 6 и генератора 5, при этом на выходах выпрямителей появляются сигналы полусинусоид. Усреднители 9 и 10 сглаживают полусинусоиды, выделяя из них постоянную составляющую. Два сглаженных сигнала вычитают между собой с помощью блока 11, и результат вычитания интегрируют блоком 12. При постоянном сигнале на входе на выходе интегратора сигнал линейно растет. Напряжение с выхода блока 12 подают на вход обмотки датчика момента 2, через нее протекает ток, который далее через резистор Ro замыкается на общий провод. При этом на резисторе возникает напряжение:
URo=IдмRо,
где Iдм - ток датчика момента.
Данное напряжение преобразуют с помощью АЦП 13 в цифровой код:
Qвых=КаRoIдм,
где Ка - коэффициент преобразования АЦП.
Блоки 6, 7, 8, 9, 10 и 11 реализуют простые операции, такие как суммирование, вычитание, выпрямление и усреднение. Точность этих операций не зависит от фазовых соотношений сигнала возбуждения и выходного сигнала датчика угла 4. Данные блоки не производят быстрых переключений отдельных временных отрезков в сигналах, как это необходимо для операций фазового выпрямления с помощью ключей в прототипе. Поэтому погрешности, вносимые в процесс измерения данными операциями, минимальны.
Ток датчика момента 2 создает внутри ЧЭ 1 момент силы, направленный навстречу моменту силы, который возник при действии измеряемой величины (ускорения) на ЧЭ. Под действием разницы указанных моментов датчик угла 4 отклоняется в сторону нулевого положения, уменьшается выходной сигнал датчика угла 4, уменьшается выходной сигнал вычитателя 11 и уменьшается рост сигнала на выходе интегратора 12. Когда моменты сил станут равны друг другу, датчик угла 4 будет находиться в нулевом положении, его выходной сигнал будет равен нулю, на входах выпрямителей 7 и 8 будут сигналы с одинаковыми амплитудами. На выходе вычитателя 11 появляется нулевой сигнал, на выходе интегратора 12 имеет место постоянное напряжение, создающее постоянный ток датчика момента, величина которого с большей точностью пропорциональна измеряемой величине:
Iдм=КчэА,
где Кчэ - постоянный коэффициент, характеризующий ЧЭ,
А - величина измеряемого ускорения.
Откуда величина выходного кода равна:
Qвых=А·Кчэ·Ka·Ro.
Погрешность измерения ускорения при этом составляет:
δQ=δчэ+δка+δRo+δo,
где δчэ - относительная погрешность преобразования ЧЭ,
δка - относительная погрешность АЦП,
δRо - относительная нестабильность резистора Ro,
δо - относительное смещение «0» на входе интегратора 12 при нулевом положении датчика угла 4.
Современные АЦП, имеющие число разрядов 22, характеризуются нелинейностью относительно максимального выходного кода порядка 1·10-6, а их температурная нестабильность составляет 2·10-6 1/°С. Относительная температурная нестабильность образцового резистора Ro может быть на уровне 5·10-6 1/°С. Интегратор 12, выпрямители 7 и 8, сумматор 6 и вычитатель 11 собраны на основе прецизионных усилителей, имеющих смещение «0» на уровне 10-6 В/°С. Усреднители 9 и 10 собраны на основе RC-цепей и не вносят дополнительной погрешности в преобразование постоянного напряжения. Поэтому суммарное смещение нуля на входе интегратора может составлять: Uсм0=5·10-61/°С. При измерении ускорения 1g на выходе интегратора 12 образуется напряжение Ug=10 В, поэтому относительное смещение «0» на входе интегратора составляет:
где Ки - коэффициент передачи интегратора,
Краз - общий коэффициент передачи по всей разомкнутой цепи обратной связи системы управления ЧЭ, включающий в себя коэффициент Ки.
Обычно: 
Откуда 
Поэтому относительная погрешность измерения ускорения 1g равна:
δg=δчэ+10-6+2·10-61/°С+5·10-61/°С+5·10-81/°С.
При стабилизации температуры на уровне 10-1°С данная погрешность в основном определяется только погрешностью ЧЭ:
δg=δчэ+10-6+7,05·10-7≈δчэ≈10-5.
Погрешность ЧЭ в заявляемом способе снижается также за счет применения операции интегрирования, когда при любом измеряемом ускорении датчик угла находится в нулевом положении, исключая нелинейности датчика угла. Поэтому погрешность измерения реально составляет:
δg=δчэ=10-5.
Дальнейшее увеличение точности возможно за счет совершенствования свойств ЧЭ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ косвенного измерения при помощи дифференциального датчика и устройство для его реализации | 2018 |
|
RU2675405C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОЙ ЭЛЕКТРОПРОВОДИМОСТИ МОРСКОЙ ВОДЫ | 2007 |
|
RU2366937C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
| ВИБРАЦИОННЫЙ МАГНИТОМЕТР | 2007 |
|
RU2341810C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ВЫСОКОТОЧНЫЙ СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ТОКА | 2010 |
|
RU2420853C1 |
| Устройство для автоматического мониторинга магнитных полей | 2017 |
|
RU2643233C1 |
| СИСТЕМА УПРАВЛЕНИЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2018 |
|
RU2697031C1 |
Изобретение относится к измерительной технике, а именно к способам управления чувствительными элементами. Датчик угла чувствительного элемента возбуждают переменным синусоидальным напряжением, преобразуют постоянное напряжение в ток, протекающий через датчик момента чувствительного элемента, величину тока преобразуют в цифровой код, который является результатом измерения, введена последовательность действий, согласно которой выпрямляют, а затем усредняют напряжение возбуждения датчика угла, суммируют между собой переменные напряжения возбуждения датчика угла и выхода датчика угла, выпрямляют, а затем усредняют результат суммирования, который вычитают из усредненного напряжения возбуждения, результат вычитания интегрируют, образуя постоянное напряжение. Технический результат заключается в снижении погрешности измерения механической величины. 1 ил.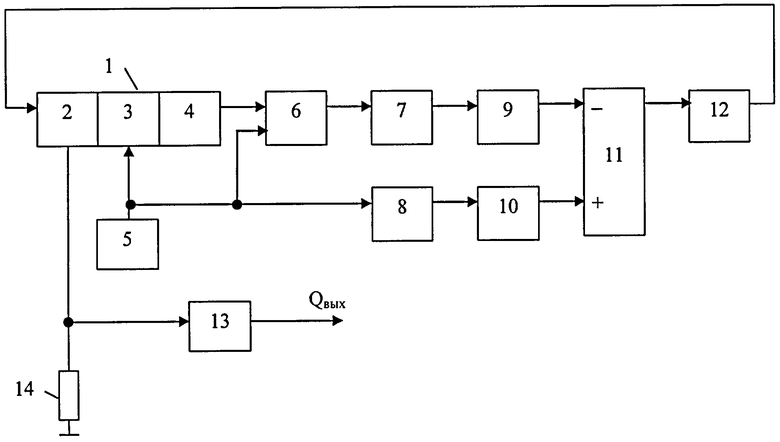
Способ управления чувствительным элементом для измерения механических величин, согласно которому возбуждают датчик угла чувствительного элемента переменным синусоидальным напряжением, преобразуют постоянное напряжение в ток, протекающий через датчик момента чувствительного элемента, величину тока преобразуют в цифровой код, который является результатом измерения, отличающийся тем, что выпрямляют, а затем усредняют напряжение возбуждения датчика угла, суммируют между собой переменные напряжения возбуждения датчика угла и выхода датчика угла, выпрямляют, а затем усредняют результат суммирования, который вычитают из усредненного напряжения возбуждения, результат вычитания интегрируют, образуя постоянное напряжение.
| Берендс Д.А | |||
| и др | |||
| Приборы и системы автоматического управления с широтноимпульсной модуляцией | |||
| - Л.: Машиностроение, 1982 | |||
| Измеритель угловой скорости | 1977 |
|
SU691758A1 |
| CN 101135696 A, 05.03.2008 | |||
| Датчик частоты вращения асинхронного двигателя | 1978 |
|
SU779810A1 |

