Предлагаемое изобретение относится к измерительной технике, а именно к средствам контроля измерителя угловых скоростей (ИУС).
Известен стенд массачусетского технологического института, содержащий поворотную платформу для закрепления на ней контролируемого ДУС, установленную на оси стенда, чувствительный элемент, электродвигатель и усилитель (Сломянский Ю. Н. Поплавковые гироскопы и их применение.-М.: 1958, стр. 178-190).
В качестве чувствительного элемента стенд содержит интегрирующий гироскоп, достаточно грубый по своим техническим характеристикам.
Входная ось контролируемого ДУС параллельна оси вращения платформы.
После закрепления на стенде контролируемого ДУС стенд становится двухгироскопной системой. При использовании интегрирующего гироскопа в качестве чувствительного элемента для уменьшения погрешности системы стабилизации необходимо увеличивать коэффициент усиления системы стабилизации, при этом возникают сложности с обеспечением устойчивости системы, для чего приходится допускать увеличение статической и динамической погрешности. Испытуемые приборы, закрепляемые на платформе, являются источниками вибраций, что приводит к появлению помех на входе усилителя системы стабилизации, вызывает дополнительный дрейф чувствительного элемента стенда (интегрирующего гироскопа), т.е. приводит к погрешности задания угловой скорости и искажению гармонических колебаний ( при контроле АЧХ и ФЧХ).
Стенд не получил применения для контроля масштабного коэффициента прецизионных ДУС и контроля АЧХ и ФЧХ из-за погрешностей задания постоянной по величине угловой скорости и гармонических колебаний по оси вращения стенда, возникающих вследствие взаимовлияния контролируемого ДУС и чувствительного элемента стенда.
Известен стенд для контроля датчиков угловых скоростей по а.с. N 476516 от 28.05.73, который содержит основание, имеющее возможность вращаться вокруг оси стенда, предназначенное для закрепления на нем датчика угловой скорости, подлежащего контролю, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому ДУС, информационный датчик угла, выполненный в виде нуль-контакта, закрепленного на оси вращения стенда, и измерительную систему. Нуль-контактный датчик предназначен для отсчета целого числа оборотов вращающейся оси (с контролируемыми ДУС), что позволяет определять среднюю за оборот задаваемую скорость и таким образом компенсировать ее колебания за счет неравномерности вращения оси стенда.
Измерительная система содержит конденсатор, включенный последовательно в цепь обратной связи контролируемого ДУС между выходом усилителя обратной связи ДУС и его датчиком момента, и ключ, подключенный параллельно конденсатору. Таким образом, при контроле проверяемый прибор соединен с элементами измерительной системы стенда. Кроме того, измерительная система содержит два источника эталонного напряжения и самопишущий милливольтамперметр. При этом один эталонный источник подключен параллельно к ключу и конденсатору, а ко второму эталонному источнику параллельно подключено эталонное сопротивление.
Наиболее близким по технической сущности к заявляемому техническому решению является стенд по а.с. N 459735, кл. G 01 21/00, 1975.
Этот стенд содержит стол для установки испытуемого прибора и привод стола с двумя двигателями, один из которых - коллекторный постоянного тока - связан со столом, причем щетки коллектора двигателя постоянного тока укреплены на валу второго двигателя.
Этот стенд принят за прототип.
Устройства, описанные выше, имеющие в качестве основы электромеханический стенд с редукцией, не позволяют контролировать амплитудно-частотную (АЧХ) и фазово-частотную (ФЧХ) характеристики ДУС, также являющиеся основными контролируемыми характеристиками. При контроле АЧХ и ФЧХ задаются не механические колебания вокруг оси чувствительности ДУС, как это имеет место в эксплуатации, а колебания его оси прецессии, возбуждаемые генератором, подключенным к датчику момента ДУС.
Таким образом, имеет место неадекватность условий испытаний эксплуатационным условиям.
Описанное устройство по а.с. N 459735 имеет следующие недостатки:
1) недостаточная точность контроля масштабного коэффициента прецизионного ДУС вследствие погрешности и нестабильности задания стендом постоянной по величине и направлению угловой скорости;
2) низкая чувствительность стенда, то есть невозможность точного задания малых угловых скоростей от 0,01 до 0,1o/с при аттестации прецизионных ДУС по масштабному коэффициенту;
3) возможность измерения масштабного коэффициента только при задании целого числа оборотов основания, то есть по отношению к среднему значению угловой скорости. При измерении масштабного коэффициента ДУС на части оборота основания нестабильность задаваемой угловой скорости вносит большие погрешности в результаты измерений, а необходимость задания целого числа оборотов существенно удлиняет время контроля, особенно на малых скоростях;
4) невозможность задания от стенда гармонических колебаний вокруг оси чувствительности ДУС для контроля АЧХ и ФЧХ.
Задачей изобретения является расширение функциональных возможностей стенда при обеспечении высокой точности задания угловых скоростей.
Поставленная задача решается посредством того, что в стенд для контроля угловых скоростей, содержащий корпус, платформу, установленную с возможностью вращения на оси стенда, электродвигатель постоянного тока, коллектор, введены источник калиброванного напряжения, два кварцевых маятниковых акселерометра, усилитель системы стабилизации с сумматором, интегратор напряжений, последовательно соединенные фотоэлектрический муаровый датчик угла, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, блок преобразования информации контролируемого измерителя, согласующее устройство в ЭВМ, причем акселерометры закреплены на платформе, ось чувствительности первого акселерометра перпендикулярна радиусу платформы, ось чувствительности второго акселерометра расположена вдоль радиуса платформы, каждый акселерометр содержит корпус, кварцевую пластину, емкостный датчик угла и магнитоэлектрический датчик момента, соединенные через усилитель обратной связи, выходной каскад которого выполнен в виде делителя напряжения, при этом первый вход сумматора соединен с первым выходом делителя напряжений первого акселерометра, второй вход сумматора соединен с выходами интегратора напряжений, вход которого соединен со вторым выходом делителя напряжений первого акселерометра, третий вход сумматора соединен с выходом источника калиброванных напряжений, выход сумматора соединен с первым входом усилителя стабилизации, первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами усилителя стабилизации, третий выход делителя напряжений первого акселерометра соединен с первым входом согласующего устройства, выход делителя напряжений второго акселерометра соединен со вторым входом согласующего устройства, вход блока преобразования информации контролируемого измерителя соединен с выходом измерителя, а выход блока преобразования информации измерителя - с третьим входом согласующего устройства, четвертый вход которого соединен с блоком преобразования информации фотоэлектрического датчика угла, а выход согласующего устройства соединен с входом ЭВМ.
Совокупность существенных признаков, характеризующих заявляемое техническое решение, позволяет в сравнении с прототипом достигнуть технического результата, заключающегося в следующем:
1) чувствительность предлагаемого устройства, т.е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента, контролируемого ИУС, определяется не моментами трения на оси вращения стенда и коэффициентом трения в редукции, как это имеет место в прототипе, а чувствительностью кварцевого акселерометра, чему соответствует величина угловой скорости, на несколько порядков меньшая, чем в прототипе;
2) повышение точности и стабильности задаваемой угловой скорости обеспечивается за счет наличия в предлагаемом техническом решении:
а) двухконтурной системы управления, что позволяет за счет одного контура (цепи обратной связи кварцевого акселерометра) обеспечить устойчивость системы, повысив при этом во втором контуре (из условий достижений необходимой точности и стабильности задаваемой угловой скорости) коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем постоянного тока;
б) использования фотоэлектрического муарового датчика угла в качестве информационного датчика устройства, который обеспечивает высокоточное измерение задаваемой угловой скорости, что определяет точностные характеристики стенда;
3) возможность контроля АЧХ и ФЧХ на устройстве, т.е. расширение функциональных возможностей, обеспечиваемая, в отличие от прототипа, безредукторным исполнением привода;
4) предлагаемое устройство позволяет производить измерение масштабного коэффициента ИУС при повороте оси стенда на любой угол, значительно меньший оборота, что сокращает время испытаний без снижения точности контроля, как это имело место в прототипе. Это обеспечивается за счет соединения выхода обратной связи тангенциального акселерометра с первым входом сумматора, третий вход которого соединен с источником калиброванных напряжений, а выход - с двигателем стенда;
5) в предлагаемом устройстве, кроме сигнала с выхода усилителя обратной связи кварцевого акселерометра, пропорционального тангенциальному линейному ускорению платформы, т. е. угловому ускорению, который подается на первый вход сумматора, на второй его вход подается интеграл от сигнала, пропорционального угловому ускорению платформы. Это означает, что в контуре управления двигателем осуществляется регулирование по первой и второй производной от угла разворота платформы, что, как известно из теории автоматического регулирования, улучшает качество регулирования и снижает погрешности системы управления;
6) в предлагаемом устройстве за счет применения в качестве чувствительного элемента системы управления двигателем тангенциального кварцевого акселерометра обеспечивается широкий диапазон задаваемых стендом угловых скоростей (при диапазоне измерения акселерометром от 0,0000005 g до 7g диапазон задаваемых угловых скоростей колеблется от 0,0002o/с до 1200o/с при достаточно малых габаритах платформы, радиус которой равен 15 см);
7) обеспечивается съем информации о задаваемой угловой скорости с высокой точностью в области малых угловых скоростей (от 0,0002o/с до 10o/с за счет использования фотоэлектрического муарового датчика угла, а в области средних и больших угловых скоростей (от 10o/с до 1200o/с) за счет использования информации второго акселерометра, измеряющего центробежное ускорение;
8) имеется выходная информация по угловому ускорению;
9) устройство стыкуется с ЭВМ.
Таким образом, заявляемое техническое решение представляет собой новую совокупность признаков по сравнению с известными решениями задачи, оно не очевидно из уровня техники и может быть признано соответствующим критерию "изобретательский уровень".
Техническая сущность предлагаемого устройства поясняется фиг. 1, 2, 3 и 4.
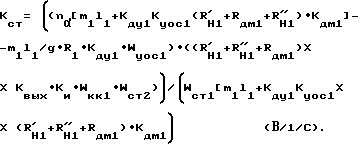
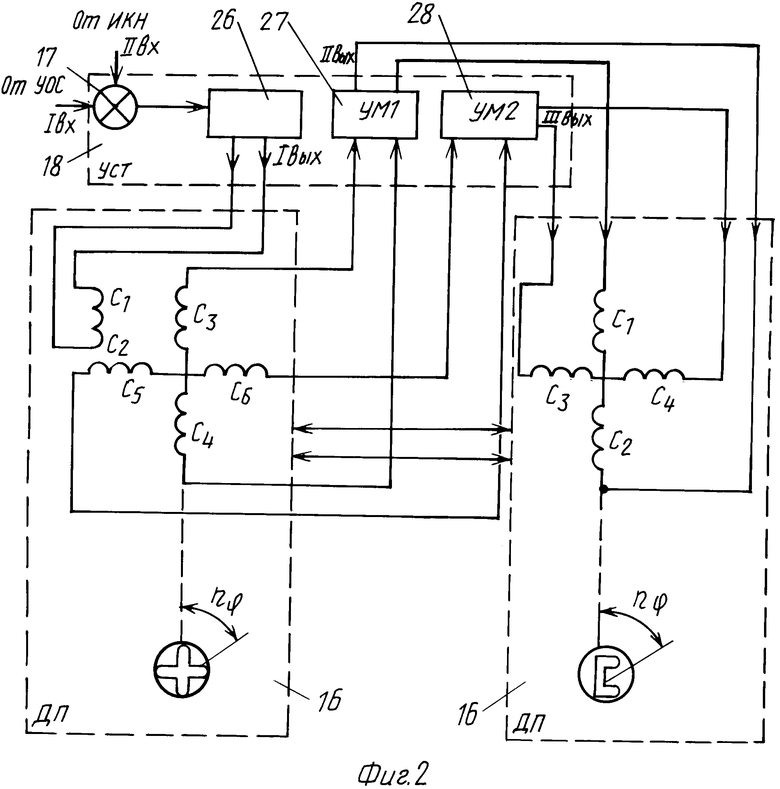
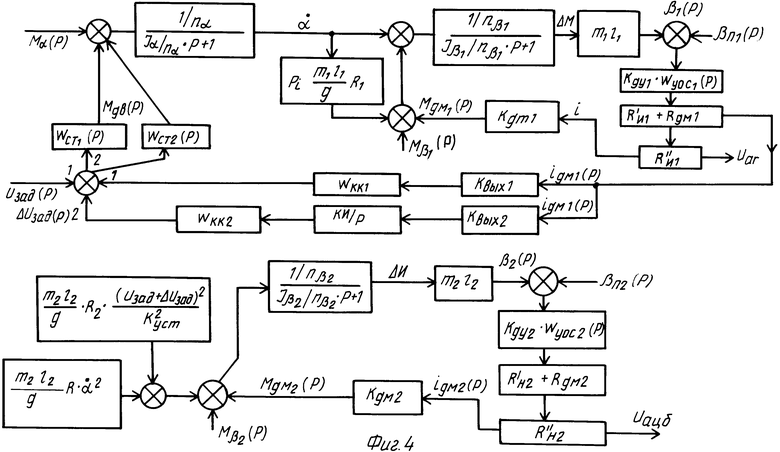
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - структурная схема усилителя системы стабилизации и бесконтактного двигателя постоянного тока; на фиг. 3(а и б) - конструктивная схема кварцевого акселерометра; на фиг.4 - структурная схема предлагаемого устройства как системы автоматического управления.
Предлагаемое устройство содержит корпус (на фиг.1 не показан), траверсу 1, имеющую ось вращения, являющуюся выходной осью стенда. На траверсе 1 закреплена платформа 2, предназначенная для установки испытуемого прибора 3, коллектор 4 для подвода питания к испытуемому прибору и кварцевые акселерометры 5 и 6. Кварцевые акселерометры 5 и 6 имеют идентичную конструкцию, которая в виде функциональной схемы представлена на фиг. 1 и в виде конструктивной схемы на фиг. 3. Чувствительным элементом акселерометров 5 и 6 является кварцевая пластина 7, у которой центральная часть (собственно маятник - фиг. 3) соединена с наружным кольцом пластины 7 - торсионом, выполненным из той же самой пластины в виде местного утончения до размера а=0,6 мм. Наружное кольцо пластины 7 зажато между двумя корпусами 8 акселерометра. Датчик угла 9 акселерометра - емкостной дифференциальный выполнен в виде напыления из золота на маятнике пластины 7 и поверхностях корпусов 8. Датчик момента 10 - магнито-электрический, состоит из катушек, закрепленных на маятнике пластины 7, и постоянных магнитов, закрепленных на корпусах 8. Электрическая связь между обкладками датчика угла 9, катушками датчика момента 10 и внешними цепями осуществлена с помощью золотого напыления на торсионе пластины 7.
Акселерометр 5 закреплен на платформе 2 так, что ось его чувствительности перпендикулярна радиусу R1 платформы 2. Этому соответствует положение пластины 7 вдоль радиуса R1 (плоскость пластины перпендикулярна плоскости платформы). Этот акселерометр измеряет тангенциальное линейное ускорение при вращении платформы и в дальнейшем тексте называется тангенциальным. Акселерометр 6 закреплен на платформе 2 так, что его ось чувствительности расположена вдоль радиуса R2 платформы 2 (причем R1=R2. Этому соответствует расположение плоскости пластины 7 перпендикулярно радиусу R2. Этот акселерометр измеряет центробежное ускорение при вращении платформы 2 и в дальнейшем тексте называется центробежным.
Плоскость пластины 7 также перпендикулярна плоскости платформы 2.
Усилители обратной связи 11 обоих акселерометров 5 и 6 абсолютно идентичны, выполнены каждый в виде бескорпусной гибриднопленочной микросборки 12 на керамической подложке. Корпус усилителя обратной связи 11 закреплен непосредственно на корпусе соответствующего акселерометра 5 и 6. В состав усилителя 11 входит также делитель напряжения 13 (для акселерометра 5) и 14 (для акселерометра 6), который выполнен в виде регулировочных резисторов, расположенных вне микросборок 12. Датчик угла 9, микросборка 12 (собственно усилитель обратной связи), делитель напряжения 13 (14) и датчик момента 10 соединены последовательно. Соединение датчика угла 9, усилителя обратной связи 12, сопротивлений RН′, RН″ , Rдм и датчика момента 10 - образуют первый контур системы управления стенда.
Конструкция кварцевого акселерометра разработана Московским институтом электромеханики и автоматики (МИЭА) и имеет серийное исполнение - акселерометр АК6 (6В2 781.278 ТУ).
На оси траверсы 1 закреплен подвижный лимб фотоэлектрического муарового датчика угла 15, неподвижный лимб жестко связан с корпусом стенда. Конструкции подобных датчиков описаны в книге "Фотоэлектрические преобразователи информации". Под ред. Преснухина Л.Н.-М.; Машиностроение, 1974 стр. 294-309.
На оси траверсы 1 со стороны, противоположной фотоэлектрическому датчику угла 15, закреплена подвижная часть двигателя постоянного тока 16, выполненного по схеме "Датчик положения - двигатель бесконтактный" (ДП-ДБ). Неподвижные части ДП-ДБ соединены в одном корпусе, жестко закрепленном на корпусе предлагаемого устройства. Датчик положения ДП представляет собой синусно-косинусный вращающийся трансформатор (фиг. 2) с безобмоточным ротором (обмотка C1-C2-обмотка возбуждения, C3-C4, C5-C6- - синусная и косинусная обмотки). Конструктивное исполнение такого вращающегося трансформатора описано, например, в книге Ахмеджанов А.А. Системы передачи угла повышенной точности. -М. -Л.: Энергия, 1966. Вторая часть двигателя, собственно бесконтактный двигатель ДБ имеет двухобмоточный статор (обмотки C1-C2, C3-C4 и восьмиполюсный ротор. Такие двигатели описаны, например, в книге Дубенского А.А. "Бесконтактные двигатели постоянного тока".- М.: Энергия, 1967.
Делитель напряжения 13 акселерометра 5 имеет три выхода. Первый выход соединен с первым входом сумматора 17, входящего в состав усилителя системы стабилизации 18; второй выход делителя 13 соединен со входом интегратора напряжений 19, выход которого соединен со вторым входом сумматора 17. Сумматор 17 выполнен на базе операционного усилителя (см. Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов.-М.; Радио и связь, 1991, стр. 96, схема 4.20Б).
Интегратор напряжения 19 также выполнен на базе операционного усилителя с конденсатором обратной связи, выполненным в виде Т-образной сборки и такой же Т-образной резисторной сборки во входной цепи (Там же, стр. 108). Третий вход сумматора 17 соединен с выходом источника калиброванных напряжений 20. Выход сумматора 17 соединен с входом бесконтактного двигателя постоянного тока 16. Подробная схема подключения рассматривается ниже. Эта цепь является вторым контуром управления двигателя 16.
Для обработки выходной информации по угловой скорости, развиваемой стендом, имеются устройства для измерения угловых скоростей низкого диапазона от 0,0002o/с до 10o/с - соединенные последовательно: фотоэлектрический муаровый датчик угла 15, интерполятор фазовый 21 и блок преобразования информации 22, причем выход последнего соединен с четвертым входом согласующего устройства 23. Схемное и конструктивное решение элементов фотоэлектрического датчика угла 15, интерполятора фазового 21 и блока преобразования информации 22 описаны в книге "Высокоточные преобразователи угловых перемещений". Под редакцией Ахмеджанова А.А.-М.: Энергоиздат, 1986, стр. 77-92, и "Фотоэлектрические преобразователи информации". Под ред. Преснухина Л.Н.-М.: Машиностроение, 1974, стр. 294-309.
Для измерения угловых скоростей средних и больших по величине 10o/с - 1200o/с, задаваемых стендом, выход делителя напряжения 14 и усилителя обратной связи 11 центробежного акселерометра 6 соединен со вторым входом согласующего устройства 23. Для формирования информации по угловому ускорению стенда третий выход делителя напряжений 13 усилителя обратной связи 11 тангенциального акселерометра 5 соединен с первым входом согласующего устройства 23.
Для обработки информации с используемого прибора 3 введен блок преобразования информации 24, вход которого соединен с выходом испытуемого прибора 3, а выход - с третьим входом согласующего устройства 23. Схемотехническое решение блока преобразования 24 (БПИ) испытуемого прибора целиком определяется типом испытуемого прибора.
Так, если информация с испытуемого измерителя угловой скорости, например, волоконно-оптического гироскопа (ВОГ) - аналоговая, то блок БПИ 24 представляет собой аналогово-цифровой преобразователь (АЦП), например, выполненный в виде платы "ЛАБ-АДИКС-70" 12-разрядного АЦП либо "ЛАБ АДТКС-20Н" с 16-разрядным АЦП (см. статья центра АЦП "Мир ПК" N 3, стр.13, "Радиотехника и электроника" вып.10, 1993, стр.144).
Если информация испытуемого прибора цифровая, то может быть использована в качестве БПИ 24 плата "ЛАБ АДИКС-24Д".
Согласующее устройство 23 выполнено в виде двух идентичных ячеек ЯПТ КХ3.080.031. Каждая ячейка имеет три канала входа и один выход и обеспечивает прием информации в виде 16-разрядного параллельного кода с фотоэлектрического датчика угла стенда (вход IV СУ 23), а также прием информации по двум каналам в виде унитарного кода с выхода испытуемого прибора (вход III СУ 23). Это дает возможность контроля приборов с еще одним типом выходной информации помимо указанных выше. При этом БПИ 24 оказывается конструктивно совмещенным с СУ23, однако общность схемы на фиг. 1 не нарушается, т.к. связь выхода БПИ24 и СУ23 остается, т.к. СУ23 обеспечивает привязку всей обрабатываемой информации к переднему фронту импульсов фотоэлектрического датчика угла 15. Кроме того, согласующее устройство обеспечивает прием и измерение аналоговых сигналов (выход 1 на одной ячейке СУ23, выход II на второй ячейке СУ23). Выход СУ23, связанный с ЭВМ, обеспечивает взаимодействие по системному каналу в соответствии с ГОСТ 26765.51-86.
На фиг. 2 представлена структура усилителя системы стабилизации 18 и его связи с двигателем 16. Усилитель содержит преобразователь 26 и два идентичных усилителя мощности 27, 28. Преобразователь 26 представляет собой устройство для модуляции и усиления постоянного сигнала, выполненное на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Пример такого преобразователя приведен в книге Фабрикант Е.А., Журавлева Л.Д. Динамика следящего привода.-М.: Машиностроение, 194, стр. 73.
Каждый из усилителей 27, 28 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью. Такие схемы описаны в той же книге.
Усилитель системы стабилизации 18 и двигатель 16 соединены следующим образом. Вход преобразователя 26 соединен с выходом сумматора 17. Вход преобразователя 26 является первым входом усилителя стабилизации 18.
Выходы усилителя стабилизации 18: первый выход - это выход преобразователя 26, который связан с обмоткой возбуждения С1-С2 ДР двигателя 16 (первым входом двигателя 16); второй выход - это выход усилителя мощности 27, который соединен синусной обмоткой С1-С2 ДП двигателя 16 (вторым входом двигателя 16); третий выход - это выход усилителя мощности 28, который соединен с косинусной обмоткой ДБ двигателя 16 (третьим входом двигателя 16). Второй вход усилителя стабилизации 18 есть вход УМ1-27. Этот второй вход усилителя стабилизации 18 соединен с первым выходом двигателя 16, а именно с синусной обмоткой С3-С4 ДП двигателя 16. Третий вход усилителя стабилизации 18 - это вход УМ2-28. Этот третий вход соединен со вторым выходом двигателя 16, а именно с косинусной обмоткой С5-С6 ДП двигателя 16.
Предлагаемый стенд работает следующим образом.
Режим контроля масштабного коэффициента ИУС.
От задатчика эталонного напряжения 20 на третий вход сумматора 18 подают напряжение Uзад., пропорциональное угловой скорости ω0 которую необходимо задать. Поскольку на первый и второй входы сумматора 17 напряжение еще не поступало, то это же напряжение Uс с выхода сумматора 18 поступает на вход преобразователя 26, который вырабатывает модулируемые напряжения, подаваемые на вход двигателя 16, а именно на обмотку С1-С2 ДП.
При появлении напряжения на обмотке С1-С2 в выходных обмотках С3-С4 и С5-С6 индуцируются напряжения:
UДп1 = UmaxsinΘ и UДп2 = UmaxcosΘ; Θ=nϕ,
где
ϕ - относительный угол разворота ротора ДП, относительно статора;
n - число пар полюсов.
Эти напряжения усиливаются и корректируются усилителями 27, 28, после чего поступают на обмотки С1-С2 и С3-С4 ДБ.
Суммарный момент, действующий на ротор двигателя 16, равен сумме моментов, развиваемых обеими обмотками ДБ: ,
,
где
к - коэффициент крутизны характеристики ДБ;
Φmax,J - максимальное значение магнитного потока и средняя величина тока I в ДБ 16.
Двигатель 16 развивает момент, начинается вращение оси 1 с угловой скоростью ω.
Угловая скорость ω действует вдоль оси траверсы 1. Если ω постоянна, т. е. ω = ω0 = const , то угловое ускорение ε = dω0/dt = 0, тангенциальное линейное ускорение aτ = ε R1=0 и напряжение Uaτ на всех трех выходах делителя напряжений 13 усилителя обратной связи 11 тангенциального акселерометра 5 равно нулю. При этом корректирующее напряжение на первый и второй входы сумматора 17 не подается.
На выходе делителя напряжения 14 усилителя обратной связи 11 центробежного акселерометра 6 возникает напряжение Uцб, пропорциональное квадрату угловой скорости ω0. Действительно, ось чувствительности центробежного акселерометра 6 ориентирована вдоль радиуса R2 платформы 2, т.е. на чувствительный элемент акселерометра 6 действует центробежное линейное ускорение aцб = ω2R2 (ускорение силы тяжести не дает выходного сигнала из-за принятой ориентации акселерометра). В соответствии с известным принципом работы маятникового акселерометра с обратной связью (см. Никитин Е.А., Балашова А.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров. - М.: Машиностроение, 1969) имеем:
ml=kдмIос,(1)
где
ml - маятниковость (Гсм);
кдм - крутизна характеристики датчика момента 10 акселерометра;
Iос - ток в цепи обратной связи.
Откуда Iос=ml/kдм - при действии одного g.
При действии aцб = ω2R2; Iос2 = mlω
Выходное напряжение Uцб, снимаемое с выхода делителя 14, равно:
где
 - сопротивления, образующие делитель, и сопротивления обмотки датчика момента акселерометра 6.
- сопротивления, образующие делитель, и сопротивления обмотки датчика момента акселерометра 6.

Откуда
Напряжение Uцб поступает на второй вход согласующего устройства 23 (на АЦП), преобразуется в код и передается и ЭВМ 25, которая вычисляет зависимость (4) и выдает информацию о величине угловых скоростей в пределах диапазона измерения акселерометра 6. Для известного кварцевого акселерометра АК6, примененного в рассматриваемом тракте измерения угловой скорости, диапазон измеряемых угловых скоростей равен 0,3-1200o/с. Действительно, порог чувствительности АК6 0,000005 g, предел измерения - 7 g.
Aцб/g=0,0000005g, откуда Aцб=0,0005см/с2
При действии постоянной угловой скорости с блока преобразования 22 фотоэлектрического датчика угла на четвертый вход СУ 23 поступает параллельный 16-разрядный код, соответствующий углу разворота траверсы 1. ЭВМ 25 вычисляет угловую скорость путем деления угла на соответствующее время. Как известно, при малой цене импульса угловой информации фотоэлектрического датчика угла 15 (0,1-0,3") удается с высокой точностью измерять угловые скорости в диапазоне от 0,0001o/с до 10o/с. На больших скоростях имеет место динамическая погрешность, равная Tоп• ωизм , где Топ - период опорной частоты интерполятора фазового 21. В диапазоне скоростей ω0(0,0001-0,3) °/с , перекрываемом обоими измерителями, фотоэлектрическим датчиком угла 15 и акселерометром 6, ЭВМ 25 производит сравнение информации и операцию мажорирования, что повышает ее точность.
Пусть при задании на третий вход сумматора 17 Uзад=const вследствие действия помех (см. структурную схему фиг. 4), как-то: нестабильности Mα момента сопротивления на оси траверсы 1 вследствие нестабильности трения в коллекторе, помехи βп - шумовой составляющей выходного сигнала акселерометра 5, тяжения датчика момента 10 Mβ1 (последние две составляющие малы) - скорость вращения ω траверсы 1 не постоянна, т.е. ε = dω/dt ≠ 0 , тогда на чувствительный элемент тангенциального акселерометра 5 действует линейное ускорение, равное aτ = ε R1 . В соответствии с (2), в цепи обратной связи акселерометра 5 возникает ток
С выходов первого и второго делителя напряжений 13 усилителя 11 тангенциального акселерометра 5 снимаются два одинаковых напряжения ,
,
а с третьего выхода того же делителя - напряжение ,
,
Различные напряжения Uτ1-2 и Uτ3 , пропорциональные одной и той же величине  , организованы в связи с разными требованиями к уровню напряжений в управляющей и отсчетной цепях. Напряжение Uτ1 поступает на вход первый сумматора 17. Напряжение Uτ2 интегрируется в интеграторе 19 и на второй вход сумматора 17 поступает в виде:
, организованы в связи с разными требованиями к уровню напряжений в управляющей и отсчетной цепях. Напряжение Uτ1 поступает на вход первый сумматора 17. Напряжение Uτ2 интегрируется в интеграторе 19 и на второй вход сумматора 17 поступает в виде:
Таким образом, на первый и второй входы сумматора 17 поступают корректирующие сигналы, пропорциональные угловому ускорению и интегралу от углового ускорения за время Δτ интегрирования.
С выхода сумматора 17 на вход двигателя 16 через все вышеперечисленные связи усилителя стабилизации 18 с двигателем 16 поступает разность задающего напряжения Uзад= k•ω0, пропорционального угловой скорости ω0 = const, которую желательно задать, и корректирующих сигналов Uτ1 и Uτ2. Когда на выходе сумматора 17 разностный сигнал становится равным нулю, фактическое значение угловой скорости вращения траверсы 1 становится равным значению ω0 = const.
Таким образом, угол разворота траверсы 1 и платформы 2 с испытуемым прибором 3 регулируется по первой и второй производным, что соответствует улучшению качества регулирования. Информационные каналы стенда в этом случае работают следующим образом. С фотоэлектрического датчика угла 15 и акселерометра 6 информация по угловой скорости считывается, обрабатывается и выдается ЭВМ 25 в полном соответствии с рассмотренным выше случаем идеального воспроизведения угловой скорости. Кроме того, с третьего выхода акселерометра 5 напряжение
поступает на первый вход согласующего устройства 23 (АЦП), преобразуется в код и передается в ЭВМ 25, которая выдает информацию о текущем значении остаточной величины углового ускорения, имеющего место после завершения процесса регулирования, описанного выше.
Режим контроля АЧХ и ФЧХ
В этом режиме работа стенда аналогична описанной выше, отличие состоит в том, что на третий вход сумматора 17 вместо постоянного напряжения подается синусоидальное напряжение с фиксированными частотами в диапазоне 1-20 Гц. Платформа 2 совершает синусоидальные колебания. Система управления и системы измерений работают аналогично описанному выше.
Рассмотрим численный пример реализации описанного выше схемо-технического решения. Работа системы управления стендом описывается системой уравнений, которая в операторной форме имеет вид: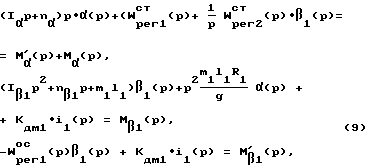 ,
,
где
α - угол разворота траверсы (платформы с испытуемым прибором), Рад;
β1 - угол разворота чувствительного элемента акселерометра 5, Рад.;
Iα, Iβ1 - моменты инерции траверсы 1 с платформой 2 и испытуемым прибором вокруг оси траверсы 1 и момент инерции подвижной части акселерометра 5 (пластины с обмотками датчика момента 10) вокруг оси поворота, Гсм•с2, соответственно;
nα, nβ1 - коэффициенты демпфирования по оси траверсы 1 и оси поворота чувствительного элемента акселерометра 5, г•см•с, соответственно;
m1l1 - маятниковость тангенциального акселерометра 5, г•см;
g - ускорение силы тяжести;
R1 - расстояние по радиусу от центра масс подвижной части чувствительного элемента акселерометра до оси траверсы 1;
Кдм1- крутизна характеристики датчика момента 10 тангенциального акселерометра 5, г•см/А;
i1 - ток в цепи обратной связи тангенциального акселерометра, А;
W
где
Кду - крутизна характеристики датчика угла 9 и акселерометра, пΦ/угл.мин ;
Ки - коэффициент передачи интегратора 19;
Wуос1(p), Wкк1(p), Wкк2(p), Wст1(p), Wст2(p), Квых1, Квых2- передаточные функции усилителя обратной связи 12, корректирующих контуров, выходных цепей звеньев управления двигателя 16 (фиг. 4); - активные сопротивления делителя 13;
- активные сопротивления делителя 13; - помехи по оси вращения траверсы 1 и оси поворота чувствительного элемента акселерометра 5;
- помехи по оси вращения траверсы 1 и оси поворота чувствительного элемента акселерометра 5; ,
,
Uзад - задающее напряжение, В.
Решение системы уравнения (9) позволяет получить выражение для коэффициента передачи стенда, связывающее Uзад и α.
При Jα =400 г•см/с2, Кдм1=150 г•см/А, nα =40 г•см/c, R1=15 см, m1l1=0,18 г•см, Квых= 500 В/А, Кду1= 1,3пФ/В, Ки= 10 с, Куос1=0,114, Wкк1=1 В/В,  = 1100 Ом, Wст2= 43,4 c/В, Wст1 = 4•104 г•см/В имеем Кст= 0,01В/с/с.
= 1100 Ом, Wст2= 43,4 c/В, Wст1 = 4•104 г•см/В имеем Кст= 0,01В/с/с.
Это означает, что при подаче Uзад = 2 мкВ задается ω0= 0,0002 °/с .
Если нестабильность угловой скорости ω вращения платформы 1 достигает угловой величины 0,0002o/с за 0,1 с, то имеет место угловое ускорение 2•10-3 o/с2 = 0,33•10-4I/с2.
При R1 = 15 см соответствует тангенциальное ускорение
aτ = 5•10-4 см/с2 , aτ = 0,5•10-6g ,
т. е. акселерометр 5 способен зарегистрировать такое ускорение (порог чувствительности АК6 0,0000005 g).
Для измерения масштабного коэффициента испытуемого прибора может быть задана минимальная угловая скорость, на порядок превышающая пороговую, т.е. 0,002o/с, для чего надо подать Uзад=20 мкВ.
Максимальная угловая скорость, которая может быть задана и измерена, оценена выше и составляет 1260o/с.
Таким образом, стенд позволяет реализовать уникальный диапазон угловых скоростей 0,002-1260o/с при контроле масштабного коэффициента испытуемого прибора и обеспечивает высокую точность и стабильность задания и измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
Использование: в измерительной технике. Сущность изобретения: стенд для контроля измерителя угловых скоростей(ИУС) содержит корпус, платформу на оси стенда, электродвигатель постоянного тока, коллектор, источник калиброванного напряжения, два кварцевых маятниковых акселерометра, каждый из которых содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные через соответствующие усилители обратной связи, выходные каскады которого выполнены в виде делителей напряжения; при этом корпус первого акселерометра закреплен на платформе стенда так, что его ось чувствительности перпендикулярна радиусу платформы, а корпус второго акселерометра закреплен так, что ось его чувствительности расположена вдоль радиуса плат-формы, усилитель системы стабилизации с сумматором, входящим в его состав, интегратор напряжений, фотоэлектрический муаровый датчик угла, интерполятор фазовый и блок преобразования информации фотоэлектрического датчика угла, соединенные последовательно, блок преобразования информации контролируемого прибора, согласующее устройство и ЭВМ. 4 ил.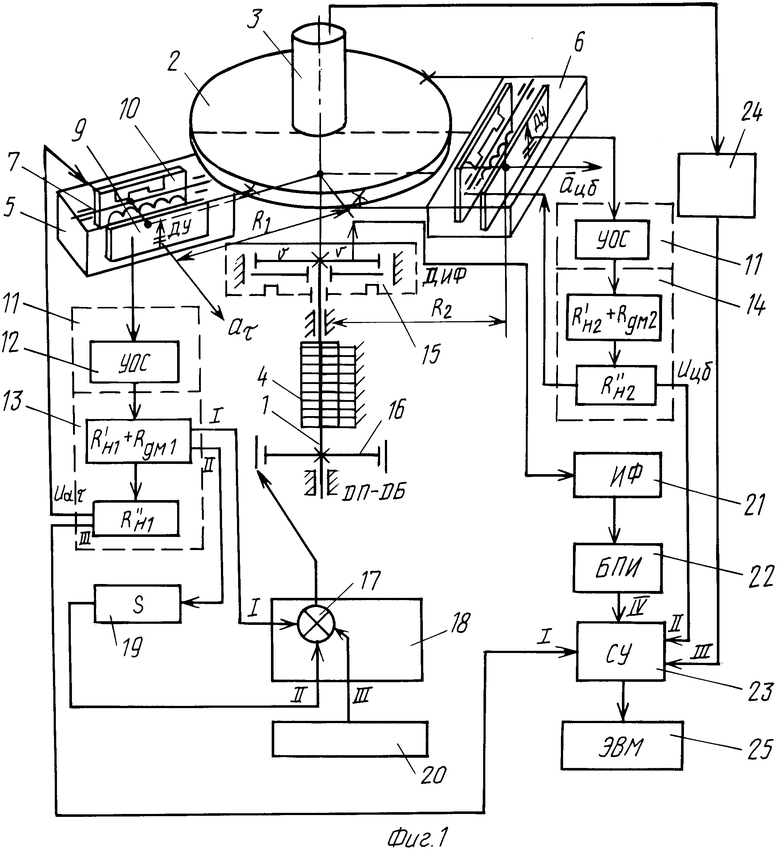
Стенд для контроля измерителя угловых скоростей, содержащий корпус, платформу, установленную с возможностью вращения на оси стенда, электродвигатель постоянного тока, коллектор, отличающийся тем, что введены источник калиброванного напряжения, два кварцевых маятниковых акселерометра, усилитель системы стабилизации с сумматором, интегратор напряжений, последовательно соединенные фотоэлектрический муаровый датчик угла, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, блок преобразования информации контролируемого измерителя, согласующее устройство и ЭВМ, причем акселерометры закреплены на платформе, ось чувствительности первого акселерометра перпендикулярна радиусу платформы, ось чувствительности второго акселерометра расположена вдоль радиуса платформы, каждый акселерометр содержит корпус, кварцевую пластину, емкостный датчик угла и магнитоэлектрический датчик момента, соединенные через усилитель обратной связи, выходной каскад которого выполнен в виде делителя напряжения, при этом первый вход сумматора соединен с первым выходом делителя напряжений первого акселерометра, второй вход сумматора соединен с выходами интегратора напряжений, вход которого соединен с вторым выходом делителя напряжений первого акселлерометра, третий вход сумматора соединен с выходом источника калиброванных напряжений, выход сумматора соединен с первым входом усилителя стабилизации, первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены с вторым и третьим входами усилителя стабилизации, третий выход делителя напряжений первого акселерометра соединен с первым входом согласующего устройства, выход делителя напряжений второго акселерометра соединен с вторым входом согласующего устройства, вход блока преобразования информации контролируемого измерителя соединен с выходом измерителя, а выход блока преобразования информации измерителя - с третьим входом согласующего устройства, четвертый вход которого соединен с блоком преобразования информации фотоэлектрического датчика угла, а выход согласующего устройства соединен с входом ЭВМ.
| SU, авторское свидетельство, 476516, G 01 P 21/00, 1975 | |||
| SU, авторское св идетельство, 1136085, G 01 P 21/00, 1985 | |||
| SU, авторское свидетельство , 172 0023, G 01 P 21/00, 1992 | |||
| SU, авторское свидетельство, 1793385, G 01 P 21/ 00, 1993 | |||
| SU, авторское свидетельство, 459735, G 01 P 21/00 , 1975. |
