Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на локомотивах, моторвагонных подвижных составах с целью повышения безопасности и регулирования движения поездов, а также в системах интервального регулирования с использованием радиоканала.
Известно Устройство для контроля местоположения локомотива (см. патент России №2063349 кл. В 61 L 23/16, 25/04).
Недостатком этого устройства является обязательное наличие станционного устройства, причем чем больше локомотивов на станции, тем сложнее и крупнее это устройство. Эти недостатки снижают надежность управления движением, усложняют обслуживание и повышают его стоимость.
Наиболее близким к заявленному изобретению по совокупности существенных признаков и функциональным возможностям является Поездное устройство автоматической локомотивной сигнализации с регулированием скорости (см. патент России №2120393 кл. В 61 L 25/06).
Недостатками этого устройства являются недостаточность сигнальных показаний для оперативного принятия решений машинистом, отсутствие надлежащей гибкости в выборе оптимального скоростного режима, устаревшая элементная база.
Сущность заявленного изобретения состоит в определении оптимального скоростного режима локомотива и контроле за его соблюдением, формировании данных о свободности блок-участков впереди по ходу движения поезда, в определении координаты поезда без участия станционных устройств и передаче по радиоканалу данных о поезде и параметрах движения, в определении расстояния до препятствия с целью более точного определения максимально допустимого скоростного режима, в расчете фактической скорости движения поезда не только по данным от датчиков пути и скорости, но и по данным от спутникового приемника, в возможности принятия решения об экстренном торможении при превышении фактической скоростью максимально допустимой на данном участке пути, в возможности взаимодействия посредством CAN-интерфейса с другими системами безопасности движения локомотива, в возможности обработки данных от вероятных дополнительных источников информации, что обеспечивает повышенную безопасность движения и упрощает станционные комплексы аппаратуры и снижает тем самым материальные затраты, в возможности контроля бдительности машиниста при работе устройства в составе Комплексного локомотивного устройства безопасности унифицированного КЛУБ-У или при использовании на борту Телеметрической системы контроля бдительности машиниста ТСКБМ.
Сравнение заявленного технического решения с аналогом и прототипом позволило установить его соответствие критерию новизна, так как оно не известно из уровня техники.
Предложенное устройство является промышленно применимым и существующими техническими средствами соответствует критерию изобретательский уровень, т.к. оно явным образом не следует из уровня техники.
При этом из последнего не выявлено каких-либо преобразований, характеризуемых отличительными от прототипа существенными признаками, для достижения указанного технического результата.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности результата.
Технический результат достигается тем, что Устройство контроля за управлением локомотивом и бдительностью машиниста представляет собой набор модулей (ячеек), установленных на объединительную плату внутри смонтированного блока. Логически модули взаимодействуют между собой посредством системного интерфейса CAN. Каждый модуль циклически, с периодичностью (450-500) мс выдает в системный интерфейс информацию о своем состоянии и результаты своей работы. Вместе с тем каждый модуль выделяет из сообщений других модулей информацию, необходимую ему для обработки данных.
Конструктивно устройство выполнено в виде блока и состоит из следующих модулей:
- двух модулей центральной обработки информации МЦО, которые определяют конфигурацию устройства, путем сравнения информации от двухканальных модулей делают выводы о достоверности этой информации, на основе данных от других модулей определяют оптимальный скоростной режим, осуществляют контроль бдительности машиниста, по результатам контроля бдительности и при несоблюдении скоростного режима принимают решение об экстренном торможении. Модули МЦО обмениваются между собой информацией и выдают ее на безопасную схему контроля СКБ, которая при рассогласовании данных по двум каналам обработки данных осуществляет перезапуск устройства;
- двух модулей измерения параметров движения ИПД, которые определяют фактическую скорость движения поезда по данным от колесных датчиков пути и скорости ДПС и от спутникового приемника СП и имеют возможность подключения к ним в дальнейшем других измерительных датчиков;
- двух модулей непрерывных каналов внешних устройств ВУ, которые принимают и декодируют сигналы от приемных катушек устройств АЛСН и АЛС-ЕН из рельсовой цепи и определяют допустимую скорость движения поезда, отслеживают проследование границ блок-участков, формируют целевую и допустимую скорости;
- модуля маршрута ММ с приемником спутниковой навигации СП, который определяет координату поезда по данным от спутникового приемника, формирует параметры движения по данным от электронной карты, записанной в flash-память модуля маршрута ММ;
- модуля радиоканала РК, который передает на станцию данные о поезде и параметры движения, принимает от станции команды ограничения скорости движения, декодирует принятую информацию и обеспечивает ее хранение до следующего сеанса связи, а также организует обмен информацией в режиме интервального регулирования, в режиме оповещения работающих на путях, в режиме, когда железнодорожные станции оборудованы электрической централизацией;
- безопасной схемы контроля СКБ и усилителя электропневматического клапана.
Внешними изделиями для данного устройства являются:
- радиоантенна с радиомодемом;
- антенна спутниковой навигации;
- приемные катушки непрерывных каналов АЛСН и АЛС-ЕН;
- датчики пути и скорости ДПС;
- клапан электропневматического торможения ЭПК.
Все модули разработаны с применением современной элементной базы. Программное обеспечение модулей написано на языке ассемблера и аппаратно-ориентированном языке высокого уровня Cu для микроконтроллеров семейства INTEL51. Для трансляции файлов программы, написанных на языке Cu, использовался компилятор Cu Micro Series 8051 V4.02E/DOS фирмы IAR Systems. Для ассемблирования файлов, написанных на языке ассемблера, использовался ассемблер Micro Series 8051 V2.02/DOS фирмы IAR Systems. Для создания загрузочных модулей использовался редактор связей Micro Series Universal Linker V4.28/DOS фирмы IAR Systems.
На фиг.1 представлена структурная схема устройства, содержащая: усилитель электропневматического клапана ЭПК (1), выход которого соединен со входом электропневматического клапана (12), а вход - с выходом безопасной схемы контроля СКБ (2), входы которой соединены с выходами модулей центральной обработки информации МЦО (3) и МЦО (4), которые соединены между собой, два модуля измерения параметров движения ИПД (5) и ИПД (6), входы которых соединены с датчиками пути и скорости ДПС (13), два модуля непрерывных каналов внешних устройств ВУ (7) и ВУ (8), входы которых соединены с приемными катушками АЛСН и АЛС-ЕН (14), модуль маршрута ММ (10) с приемником спутниковой навигации СП (9), вход которого соединен с антенной спутниковой навигации СНС (15), модуль радиоканала РК (11), один из входов которого соединен с радиомодемом (17), который соединен с радиоантенной (16).
Устройство работает следующим образом
Устройство начинает работать сразу после включения питания. Перед каждой поездкой локомотива во flash-память модуля маршрута ММ (10) должны быть занесены параметры движения поезда, необходимые для работы устройства.
Сигналы АЛСН и АЛС-ЕН из рельсовой цепи через приемные катушки (14) поступают в модули непрерывных каналов внешних устройств ВУ (7 и 8), где осуществляется дешифрация этих сигналов, формируются показания локомотивного светофора, определяется количество свободных блок-участков впереди по ходу движения поезда, определяется целевая скорость (скорость, с которой локомотив должен проследовать границу текущего блок-участка), предельно допустимая скорость движения поезда на данном блок-участке.
Из модулей непрерывных каналов внешних устройств ВУ (7 и 8) данные передаются в модули центральной обработки информации МЦО (3 и 4) для принятия окончательного решения о допустимой скорости движения на данном блок-участке.
Сигналы от колесных датчиков пути и скорости ДПС (13) поступают в модули измерения параметров движения ИПД (5 и 6), где из них формируются значения фактической скорости поезда и пройденный путь. Эти данные передаются в модули центральной обработки информации МЦО (3 и 4) для сравнения с допустимой скоростью и принятия решения об экстренном торможении.
Сигналы от приемника спутниковой навигации СП (9) через модуль маршрута ММ (10) поступают в модули измерения параметров движения ИПД (5 и 6), где на основании этих сигналов и данных от электронной карты, расположенной в модуле маршрута ММ (10), определяется местоположение поезда и расстояние до препятствия. Эти данные передаются в модули центральной обработки информации МЦО (3 и 4) для расчета скоростного режима.
Сигналы из радиоантенны (16) через радиомодем (17) поступают в модуль радиоканала РК (11), где из них формируются данные об ограничениях движения на текущем участке пути, которые передаются в модули центральной обработки информации МЦО (3 и 4) для принятия окончательного решения о допустимой скорости движения на данном блок-участке.
Для повышения надежности устройства и в соответствии с требованиями безопасности в Устройстве контроля за управлением локомотивом и бдительностью машиниста используется аппаратная избыточность, а именно наиболее ответственные за безопасность движения модули центральной обработки информации МЦО (3 и 4), модули измерения параметров движения ИПД (5 и 6) и модули непрерывных каналов внешних устройств ВУ (7 и 8) выполнены двухканальными. Каждый из двухканальных модулей измерения параметров движения ИПД (5 и 6) и модулей непрерывных каналов внешних устройств ВУ (7 и 8) обрабатывает данные независимо друг от друга и передает их в модули центральной обработки информации МЦО (3 и 4). Каждый из каналов модулей центральной обработки информации МЦО (3 и 4) независимо от другого канала обрабатывает данные и принимает решение о скоростном режиме. Затем модули центральной обработки информации МЦО (3 и 4) обмениваются полученными результатами между собой по межмодульному интерфейсу и каждый модуль выдает результат на безопасную схему контроля СКБ (2).
При рассогласовании данных, полученных по двум каналам от модулей центральной обработки информации МЦО (3 и 4), безопасная схема контроля СКБ (2) инициирует общий перезапуск устройства.
Безопасная схема контроля СКБ (2) через усилитель электропневматического клапана ЭПК (1) подает на электропневматический клапан ЭПК (12) напряжение, при необходимости экстренного торможения автоматически снимается питание с электропневматического клапана ЭПК (12).
Электропитание устройства осуществляется по следующему принципу: электропитание от бортовой сети поступает на вторичные источники электропитания, которые осуществляют преобразование уровня напряжения бортовой сети в необходимый каждому модулю уровень напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕЗОПАСНОСТИ КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ С АВТОНОМНЫМИ МОДУЛЯМИ | 2009 |
|
RU2398698C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Система контроля за управлением локомотивом попутно следующих поездов | 2024 |
|
RU2823661C1 |
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи и предназначено для использования на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования с радиоканалами. Устройство представляет собой открытую гибкую систему реального времени с модульной архитектурой и содержит соединенные между собой объединительной платой ячейки схемы контроля безопасности, двухканального модуля центральной обработки, двухканального модуля измерения параметров движения, двухканального модуля внешних устройств, модуля маршрута и модуля радиоканала. Сущность изобретения состоит в определении максимально допустимого скоростного режима локомотива и контроле за его соблюдением, в определении координаты поезда без участия станционных устройств, в определении числа свободных блок-участков по ходу движения поезда, в возможности обработки данных от вероятных дополнительных источников информации. Модули устройства взаимодействуют между собой посредством системного интерфейса CAN, используются цифровая радиосвязь и спутниковая навигация. Изобретение повышает надежность управления интервальным регулированием и безопасность движения поездов на железнодорожных магистралях. 4 з.п. ф-лы, 1 ил.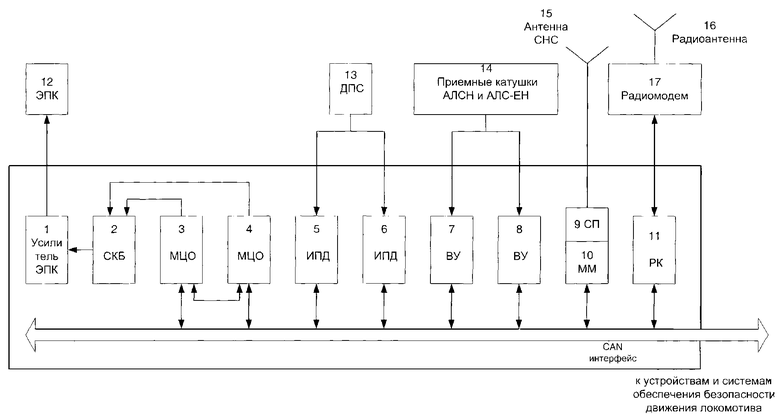
схема контроля безопасности выполнена с возможностью воздействия через усилитель на электропневматический клапан при необходимости экстренного торможения,
модули центральной обработки выполнены с возможностью анализа принятых от других модулей данных и принятия окончательного решения о скоростном режиме движения поезда, а также с возможностью контроля бдительности машиниста при подключении дополнительных устройств безопасности, например телеметрической системы контроля бдительности машиниста, и выдачи на схему контроля безопасности сигнала о необходимости экстренного торможения,
модули измерения параметров движения выполнены с возможностью определения фактической скорости движения поезда на основе данных от датчиков пути и скорости,
модули внешних устройств выполнены с возможностью приема и дешифрации амплитудно-модулированных сигналов автоматической локомотивной непрерывной сигнализации (АЛСН) и фазоразностных сигналов автоматической локомотивной единой непрерывной сигнализации (АЛС-ЕН) рельсовой цепи от приемных катушек, отслеживания проследования границ блок-участков, формирования значений целевой и допустимой скоростей,
модуль маршрута выполнен с возможностью определения координаты поезда по данным от спутникового приемника, оборудованного антенной спутниковой навигации, и формирования параметров движения по данным от электронной карты, записанной во flash-память,
модуль радиоканала выполнен с возможностью приема от станции через радиомодем, соединенный с радиоантенной, команд на ограничение скорости движения, декодирования принятой информации, хранения ее до следующего сеанса связи и передачи на станцию данных о поезде и параметров движения.
| ПОЕЗДНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С РЕГУЛИРОВАНИЕМ СКОРОСТИ | 1996 |
|
RU2120393C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |
| Развертка с винтовым гидравлическим двигателем | 1931 |
|
SU32457A1 |
| Устройство для определения параметров движения поезда | 1989 |
|
SU1768430A1 |

