Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано для управления локомотивом при маневровых работах и для повышения безопасности маневровых локомотивов (составов) при выполнении маневровых работ на станциях назначения.
Известно устройство совмещенной радиосвязи и радионавигации для определения параметров движения поезда (патент RU №2108252, бюллетень «Изобретения» 1998 г., №10). Задача этого устройства заключается в использовании связевых приемопередатчиков диспетчерского пункта и локомотива для передачи по этому каналу навигационных сигналов, что позволяет использовать такой радиоканал не только для передачи сообщений, но и для определения координат локомотива и его скорости.
Недостатками этого устройства являются сложность алгоритмов обработки сигналов измерения и недостаточная точность определения координат локомотива и его скорости. Это ведет к снижению надежности управления интервальным регулированием и безопасностью движения поездов на железнодорожной магистрали.
Наиболее близким к заявленному изобретению по совокупности существенных признаков и функциональным возможностям является комплексное локомотивное устройство безопасности унифицированное (патент RU №2248899, бюллетень «Изобретения. Полезные модели» 2005 г., №9). Задача этого устройства заключается в определении максимально допустимого скоростного режима локомотива и контроле за его соблюдением в определении координат поезда без участия станционных устройств.
Недостатками этого устройства является сложная модульная структура, низкая пропускная способность CAN интерфейса за счет общей шины CAN для всех внешних и внутренних устройств. Нет быстродействующей внутренней системной шины CAN, в результате чего снижается надежность системы. Отсутствует режим автоматического управления локомотивом. Недостаточная информативность показаний. Отсутствие надлежащей гибкости в изменении конфигурации системы под любой тип локомотива.
Технический результат заявленного изобретения состоит в более точном определении местоположения локомотива и его скорости, расширении функциональных возможностей: контроле скоростного режима совместно с навигационным приемником и управлении локомотивом в автоматическом режиме, в увеличении быстродействия и точности передачи информации по внутренней CAN-шине, повышении информативности за счет выдачи информации о работе локомотива на жидкокристаллический экран блока информации.
Технический результат достигается тем, что бортовая аппаратура автоматической локомотивной сигнализации представляет собой открытую систему реального времени с модульной архитектурой. Модули взаимодействуют между собой посредством системного интерфейса CAN. Каждый модуль циклически выдает в системный интерфейс информацию о своем состоянии и результаты своей работы. Вместе с тем, каждый модуль выделяет из сообщений других модулей информацию, необходимую ему для обработки данных.
Конструктивно бортовая аппаратура автоматической локомотивной сигнализации состоит из бортового контроллера унифицированного БКУ (главного вычислительного устройства), и подключенных к нему датчиков импульсов локомотивных ДИЛ, датчиков давления ДД, антенны спутниковой навигационной системы, антенны радиоканала через радиомодем РМ по интерфейсу RS232, блока индикации БИ по интерфейсу VGA, блока управления БУ, блока переключателей БП и подключенных к нему переключателя кабины КАБ, рукоятки бдительности РБ и электропневматического клапана ЭПК, и блока исполнительных цепей БИЦ по интерфейсу CAN.
Бортовой контроллер унифицированный БКУ содержит программируемые модули, которые программируются под любой тип локомотива.
Бортовой контроллер унифицированный БКУ включает в себя:
- модуль контроля и управления МКУ. МКУ решает задачи управления локомотивом, а так же контролирует работу всех устройств и осуществляет контроль бдительности машиниста. По результатам контроля бдительности и при несоблюдении скоростного режима МКУ принимает решение об экстренном торможении. МКУ имеет два независимых канала обработки информации, это необходимо для безопасного управления локомотивом. Каждый канал выдает контрольные сигналы на схему контроля, которая формирует определенную частоту для формирователя напряжения электропневматического клапана. Таким образом, при не совпадении контрольных сигналов напряжение не формируется и происходит экстренное торможение;
- микрокомпьютер СРС, который решает задачи определения координат локомотива по данным от модуля навигационного приемника МНП, формирует параметры движения по данным маршрутного задания, полученного с центральной станции посредством радиосвязи, осуществляет отображение информации о работе локомотива на экран блока индикации БИ;
- модуль навигационного приемника МНП, который производит обработку сигналов от спутников радионавигационных систем ГЛОНАСС и GPS;
- модуль вычислителя скорости движения ВСД, который определяет фактическую скорость движения локомотива по данным от колесных датчиков и имеет возможность подключения к нему в дальнейшем других измерительных датчиков;
- модуль измерителя датчиков давления ИДД, который определяет давление в тормозной магистрали, в тормозном цилиндре по данным от датчиков давления и необходим для управления торможением;
- модуль мост-CAN, который необходим для расширения системы, т.е. для подключения внешних устройств ВУ, которые имеют CAN интерфейс;
- формирователь безопасного напряжения ФБН для электропневматического клапана;
- схему контроля, которая обрабатывает контрольные сигналы от МКУ.
Блок индикации БИ предназначен для отображения информации, необходимой машинисту, и для ее индикации, взаимодействия с машинистом посредством рукоятки бдительности РБ и кнопок устройства ввода информации, для ввода и отображения локомотивных и поездных характеристик, текущего времени, фактической скорости и их сохранения при отключении электропитания.
Блок исполнительных цепей БИЦ подключается к бортовому контроллеру БКУ и предназначен для переключения силовых цепей локомотива, а так же для формирования данных о состоянии цепей управления локомотивом.
Блок управления БУ предназначен для введения при помощи клавиатуры необходимых данных о поезде и машинисте, а также для введения параметров движения.
Модуль радиомодема РМ, который передает на станцию данные о поезде и параметры движения, принимает от станции команды на ограничение скорости движения, а также организует обмен информацией в режиме интервального регулирования.
Рукоятка бдительности РБ предназначена для подтверждения машинистом того, что он контролирует создавшуюся поездную ситуацию (смена показаний светофора на более запрещающий, приближение значения фактической скорости к предельно допустимой). Если подтверждения не происходит (в определенный промежуток времени на МКУ не поступает соответствующий сигнал), то в МКУ формируется сигнал экстренного торможения, поступающий через схему контроля К, формирователь безопасного напряжения ФБН и блок переключателей на электропневматический клапан ЭПК.
Блок переключателей БП предназначен для включения бортовой аппаратуры, и осуществления переключения при перемене кабины управления локомотивом, а так же переключения системы в соответствующий режим работы ручной или автоматический).
На чертеже представлена структурная схема бортовой аппаратуры автоматической локомотивной сигнализации, содержащая: бортовой контроллер унифицированный БКУ 1, являющийся главным вычислительным устройством, датчик импульсов локомотивный ДИЛ 2, датчик давления ДД 3, антенну радиоканала 4, радиомодем РМ 5, антенну спутниковой навигационной системы 6, блок индикации БИ 7, блок управления БУ 8, блок переключателей БП 9, который связан с переключателем кабины КАБ 10, рукояткой бдительности РБ 11, электропневматическим клапаном ЭПК 12 и блок исполнительных цепей БИЦ 13.
БКУ 1 содержит: модуль вычислителя скорости движения ВСД 14, вход которого соединен с датчиком импульсов локомотивным ДИЛ 2; модуль измерителя давления ИДД 15, вход которого соединен с датчиком давления ДД 3; модуль навигационного приемника МНП 16, вход которого соединен со спутниковой антенной 6, а выход с микрокомпьютером СРС 17, который так же соединен с радиомодемом РМ 5 и блоком индикации БИ 7; модуль контроля и управления МКУ 18, который соединен с блоком управления БУ 8, блоком переключателей БП 9, а так же через модуль контроля К 19 с формирователем безопасного напряжения ФБН 20. МКУ 18 так же соединен с блоком исполнительных цепей БИЦ 13, выход которого направлен к цепям локомотива. Мост CAN 21 осуществляет связь с внешними устройствами ВУ 22 и соединен по общей шине с МКУ 18, микрокомпьютером СРС 17, модулем измерителя давления 15 и модулем вычислителя скорости движения ВСД 14.
Устройство работает следующим образом.
Бортовая аппаратура автоматической локомотивной сигнализации начинает работать сразу после включения тумблера питания блока переключателей 9. Модуль МКУ 18 производит тестирование всех устройств и передает результаты тестирования по внутренней шине CAN микрокомпьютеру СРС 17, после чего микрокомпьютер СРС 17 по интерфейсу VGA выводит результаты тестирования на экран блока индикации БИ 7. Машинист, анализируя результаты тестирования, задает режим работы с помощью соответствующего переключателя на блоке переключателей БП 9. МКУ 18 считывая сигналы с БП 9, передает эти сигналы по внутренней шине CAN микрокомпьютеру СРС 17, который, анализируя эти сигналы, переключается в заданный режим работы.
Сигналы от радиоантенны 4 через радиомодем 5 поступают в микрокомпьютер СРС 17, где из них формируется маршрутное задание, которое по интерфейсу VGA выводится на экран блока индикации БИ 7. При автоматическом режиме машинист подтверждает выполнение маршрутного задания нажатием соответствующей кнопки на блоке управления БУ 8, сигнал подтверждения с БУ 8 через МКУ 18 поступает по внутренней шине CAN на микрокомпьютер СРС 17. После подтверждения микрокомпьютер СРС 17 приступает к выполнению маршрутного задания, т.е. посылает по внутренней шине CAN команды управления на модуль МКУ 18, который, анализируя команду управления, формирует команду переключения, которая по первой внешней шине CAN пересылается на блок исполнительных цепей БИЦ 13. БИЦ 12 получая команду переключения, переключает соответствующие цепи локомотива, затем считывает состояние цепей локомотива и посылает эту информацию по первой внешней шине CAN модулю МКУ 18, который, анализируя эту информацию, проверяет правильность переключения цепей локомотива. При неправильном переключении цепей локомотива МКУ 18 включает служебное торможение, формируя соответствующую команду, поступающую через схему контроля К 19, формирователь безопасного напряжения ФБН 20 и блок переключателей 9 на электропневматический клапан ЭПК 12.
Сигналы от датчиков импульсов локомотивных ДИЛ 2 поступают в модуль вычислителя скорости движения ВСД 14 блока БКУ 1, где из них формируются значения фактической скорости локомотива и пройденного пути. Эти данные передаются в модуль МКУ 18 и микрокомпьютер СРС 17 для сравнения с допустимой скоростью и принятия решения о служебном торможении, данные выводятся на экран блока индикации БИ 7.
Сигналы от датчиков давления ДД 3 поступают в модуль измерителя давления ИДД 15 блока БКУ 1, где из них формируются значения давления. Эти данные передаются в модуль МКУ 18 и микрокомпьютер СРС 17 для принятия решения о включении/выключении торможения, а данные выводятся на экран блока индикации БИ 7.
Сигналы от антенны спутниковой навигационной системы 6 через модуль навигационного приемника МНП 16 блока БКУ 1 поступают в микрокомпьютер СРС 17, где на основании этих сигналов и данных определяются местоположение локомотива и расстояние до препятствия. Эти данные отображаются на экране БИ 7.
Модуль-мост CAN 21 изолирует внутреннюю шину CAN от второй внешней шины CAN, предназначен для расширения функциональных возможностей системы, и служит связующим звеном между внешними устройствами ВУ 22 и устройствами бортового контроллера БКУ 1.
Для повышения безопасности управления движением посредством роста достоверности получаемой информации модуль МКУ 18 содержит два канала обработки информации, каждый канал посылает контрольные сигналы на схему контроля К 19, которая проверяет правильность этих сигналов и формирует контрольную частоту, которая поступает на формирователь безопасного напряжения ФБН 20. ФБН 20 при наличии контрольной частоты через блок переключателей 9 включает электропневматический клапан ЭПК 12. В аварийных ситуациях (при зависании программы) модуль МКУ 18 не посылает контрольные сигналы на схему контроля К 19 следовательно не формируется контрольная частота на ФБН 20 и напряжение не поступает на ЭПК 12, тем самым срабатывает экстренное торможение. Таким образом, исключается аварийная ситуация, при которой локомотив может находится в неуправляемом состоянии.
Электропитание бортовой аппаратуры автоматической локомотивной сигнализации строится по следующему принципу: электропитание от бортовой сети поступает на вторичные источники электропитания, которые осуществляют преобразование уровня напряжения бортовой сети в необходимый каждому модулю уровень напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БОРТОВОЙ АППАРАТУРЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411153C1 |
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ С АВТОНОМНЫМИ МОДУЛЯМИ | 2009 |
|
RU2398698C1 |
| СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ЛОКОМОТИВА | 2008 |
|
RU2400386C2 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи, и может быть использовано для управления локомотивом при маневровых работах. Бортовая аппаратура автоматической локомотивной сигнализации содержит бортовой контроллер и связанные с ним датчики импульсов локомотивные, датчики давления, последовательно соединенные спутниковую антенну, антенну радиоканала и радиомодем, блок индикации, блок управления, блок переключателей, который соединен с рукояткой бдительности машиниста, переключателем кабины и электропневматическим клапаном. Бортовой контроллер включает в себя вычислитель скорости движения, измеритель датчиков давления, микропроцессор контроля и управления, модуль навигационного приемника, формирователь безопасного напряжения и схему контроля. Бортовая аппаратура дополнительно содержит блок исполнительных цепей, вход которого по первой внешней шине CAN подключен к микропроцессору контроля и управления, а выход соединен с силовыми цепями локомотива. В бортовой контроллер дополнительно введен микрокомпьютер, один из входов которого соединен через модуль навигационного приемника со спутниковой антенной, другой - через радиомодем с антенной радиоканала, а третий - с блоком индикации. Вычислитель скорости движения, измеритель датчиков давления, микропроцессор контроля и управления и микрокомпьютер соединены общей внутренней шиной CAN, которая изолирована от второй внешней шины CAN мостом-CAN. Техническим результатом является повышение безопасности маневровых локомотивов (составов) при выполнении маневровых работ. 1 ил.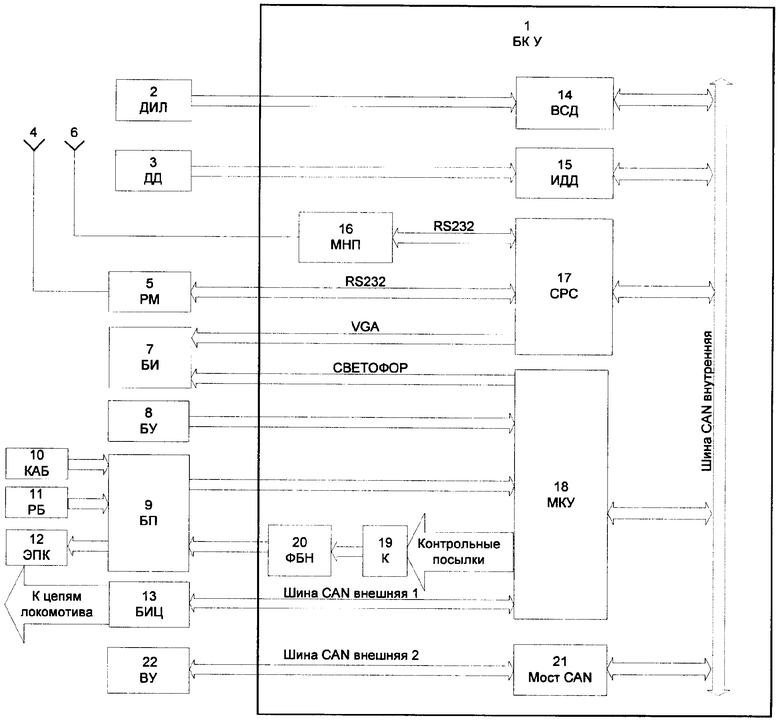
Бортовая аппаратура автоматической локомотивной сигнализации, содержащая бортовой контроллер и связанные с ним датчики импульсов локомотивные, датчики давления, последовательно соединенные спутниковую антенну, антенну радиоканала и радиомодем, блок индикации, блок управления, блок переключателей, который соединен с рукояткой бдительности машиниста, переключателем кабины и электропневматическим клапаном, при этом бортовой контроллер включает в себя вычислитель скорости движения, измеритель датчиков давления, микропроцессор контроля и управления, модуль навигационного приемника, формирователь безопасного напряжения и схему контроля, отличающаяся тем, что содержит блок исполнительных цепей, вход которого по первой внешней шине CAN подключен к микропроцессору контроля и управления, а выход соединен с силовыми цепями локомотива, при этом в бортовой контроллер дополнительно введен микрокомпьютер, один из входов которого соединен через модуль навигационного приемника со спутниковой антенной, другой - через радиомодем с антенной радиоканала, а третий - с блоком индикации, при этом вычислитель скорости движения, измеритель датчиков давления, микропроцессор контроля и управления и микрокомпьютер соединены общей внутренней шиной CAN, которая изолирована от второй внешней шины CAN мостом-CAN.
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2108252C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2286279C2 |
| СИСТЕМА ДЛЯ СОЗДАНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2195408C1 |
| EP 0379198 A2, 25.07.1990. | |||

