ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится в целом к погрузочно-разгрузочным машинам и, более конкретно, к системам и способам объединения вспомогательных беспроводных устройств дистанционного управления с погрузочно-разгрузочными машинами для повышения эффективности их использования.
В товарных складах и распределительных центрах обычно для комплектования заказов используются погрузчики-подъемники с малой высотой подъема. Такие подъемники-погрузчики обычно оборудованы грузоподъемными вильчатыми захватами, силовыми блоками и платформой, на которой может находиться оператор и перемещаться по складу, управляя погрузчиком. В состав силового блока входит управляемое колесо и соответствующие механизмы управления тягой и направлением движением, например рулевой рычаг, подвижно соединенный с рулевым колесом. Ручка управления, прикрепленная к рулевому рычагу, обычно содержит органы управления, необходимые для управления электропогрузчиком, такие как органы управления подъемом и спуском вильчатого захвата, а также скоростью и направлением движения (вперед или назад) электропогрузчика.
При выполнении типичных операций оператор комплектует заказы из имеющихся запасов товаров, которые размещены в зонах хранения, расположенных по обеим сторонам многочисленных проходов товарного склада или распределительного центра. Оператор направляет погрузчик-подъемник с малой высотой подъема к первому месту, где должны отбираться товары для первого заказа. В процессе комплектования заказа оператор отбирает товары, указанные в заказе, из мест хранения запасов этих товаров и размещает отобранные товары на поддоне, в корзине или в другой аналогичной конструкции для товаров, установленной на вильчатом захвате подъемника-погрузчика. Затем оператор направляет электропогрузчик к следующему месту, где должны быть отобраны товары, указанные в заказе. Этот процесс повторяется, пока не будут отобраны все товары, входящие в заказ.
Обычно оператор располагается на платформе электропогрузчика для перемещения на нем по складу, когда расстояния между последовательными зонами отбора товаров достаточно большие, например, превышают двадцать футов (около 6,1 м). Соответственно, оператор идет рядом с электропогрузчиком, когда отрезки маршрута между зонами отбора товаров сравнительно невелики. Для обеспечения такого режима в некоторых подъемниках-погрузчиках используются переключатели управления движением, расположенные возле вильчатого захвата, и/или на ручке управления, или возле нее. Переключатели управления движением могут использоваться оператором, идущим рядом с подъемником-погрузчиком, для его разгона до рабочей скорости, обычно от примерно 1,6 миль/час (3,3 км/час) до примерно 2,75 миль/час (4,4 км/час), для перехода от одной зоны отбора товаров к другой зоне, причем в этом случае оператору не нужно забираться на платформу электропогрузчика. Однако при выполнении таких действий оператор должен прерывать процесс отбора товаров, когда электропогрузчик перемещается к следующей зоне. Таким образом, оператор должен перемещаться из необходимого рабочего положения или менять необходимый маршрут для получения доступа к переключателям управления движением.
Не так уж и редко оператору приходится повторять процесс отбора товаров несколько сотен раз по одному заказу. Более того, оператору приходится комплектовать за смену достаточно много заказов. Таким образом, оператору приходится тратить достаточно много времени на перемещение и ориентирование электропогрузчика, в результате чего сокращается время, которое оператор может затратить на отбор товаров.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном из вариантов осуществления настоящего изобретения предложена вспомогательная система дистанционного управления погрузочно-разгрузочной машиной, содержащая носимое беспроводное устройство дистанционного управления, которое носит оператор, взаимодействующий с погрузочно-разгрузочной машиной. Носимое беспроводное устройство дистанционного управления содержит передатчик беспроводной связи и орган управления движением, соединенный с передатчиком с возможностью передачи информации между ними, причем включение оператором органа управления движением вызывает передачу передатчиком беспроводной связи запроса на движение в качестве сигнала первого типа, который указывает, что погрузочно-разгрузочная машина должна двигаться в первом направлении.
Кроме того, вспомогательная система дистанционного управления погрузочно-разгрузочной машиной содержит приемник, размещенный на машине и предназначенный для приема сигналов, передаваемых передатчиком беспроводной связи, а также контроллер, который соединен, с возможностью обмена информацией, с приемником и с системой управления тягой погрузочно-разгрузочной машины, причем контроллер при приеме сигнала первого типа анализирует по меньшей мере один параметр погрузочно-разгрузочной машины для принятия решения о возможности выполнения запроса на движение после анализа указанного по меньшей мере одного параметра и обеспечивает выполнение системой управления тягой передвижения погрузочно-разгрузочной машины, если контроллер принимает решение о выполнении запроса на движение на основе анализа указанного по меньшей мере одного параметра.
Еще в одном варианте осуществления настоящего изобретения предложен способ эксплуатации системы дистанционного управления погрузочно-разгрузочной машиной, который содержит обеспечение носимого беспроводного устройства дистанционного управления, которое носит оператор, взаимодействующий с погрузочно-разгрузочной машиной, причем носимое беспроводное устройство дистанционного управления содержит передатчик беспроводной связи и орган управления движением, соединенный с передатчиком беспроводной связи с возможностью передачи информации между ними, причем включение оператором органа управления движением вызывает передачу передатчиком беспроводной связи запроса на движение в качестве сигнала первого типа, который указывает, что погрузочно-разгрузочная машина должна двигаться в первом направлении.
Способ содержит также использование приемника, размещенного на погрузочно-разгрузочной машине и предназначенного для приема сигналов, передаваемых передатчиком беспроводной связи, а также контроллера, который соединен, с возможностью передачи информации, с приемником и с системой управления тягой погрузочно-разгрузочной машины, причем контроллер при приеме сигнала первого типа анализирует по меньшей мере один параметр погрузочно-разгрузочной машины для принятия решения о возможности выполнения запроса на движение после анализа указанного по меньшей мере одного параметра и обеспечивает выполнение системой управления тягой передвижения погрузочно-разгрузочной машины, если контроллер принимает решение о выполнении запроса на движение на основе анализа указанного по меньшей мере одного параметра.
Еще в одном варианте осуществления настоящего изобретения предложен способ синхронизации передатчика и приемника во вспомогательной системе дистанционного управления погрузочно-разгрузочной машиной, который содержит последовательность действий по включению питания погрузочно-разгрузочной машины для обеспечения ее готовности к работе, причем машина снабжена приемником для приема команд движения, передаваемых в беспроводной системе связи, и ввод режима задания связки передатчик-приемник для синхронизации приемника и соответствующего контроллера на машине, чтобы выбрать одно из нескольких беспроводных устройств дистанционного управления, причем выбранное устройство связано с оператором погрузочно-разгрузочной машины.
Способ содержит также прием приемником погрузочно-разгрузочной машины сигналов режима задания связки передатчик-приемник, причем каждый сигнал обеспечивает идентификационный код передатчика, который однозначным образом определяет одно из нескольких беспроводных устройств дистанционного управления в пределах дальности действия приемника, установление соответствия известного идентификационного кода передатчика, связанного с выбранным беспроводным устройством дистанционного управления, связанным с оператором машины, одному из сигналов режима задания связки передатчик-приемник, полученных приемником, и синхронизацию соответствующего беспроводного устройства дистанционного управления, связанного с оператором, с приемником и контроллером машины для обмена информацией между ними.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Нижеприведенное описание вариантов осуществления настоящего изобретения лучше всего можно понять при рассмотрении вместе с прилагаемыми чертежами, на которых одинаковые элементы указаны одинаковыми ссылочными номерами и на которых показано:
фигура 1 - вид в перспективе подъемника-погрузчика с малой высотой подъема в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 2 - блок-схема одного из вариантов системы дистанционного управления тягой, направлением движения и/или торможением подъемника-погрузчика, изображенного на фигуре 1, в соответствии с командами предлагаемого в изобретении беспроводного устройства дистанционного управления;
фигура 3 - схематический вид подъемника-погрузчика в проходе товарного склада в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 4 - схематический вид подъемника-погрузчика, стоящего в конце прохода товарного склада, на котором иллюстрируется зона выключения в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 5 - блок-схема варианта алгоритма процесса принятия решения контроллером на электропогрузчике, изображенном на фигуре 1, в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 6 - схематический вид устройства дистанционного управления в соответствии с различными вариантами осуществления настоящего изобретения;
фигуры 7А-7В - схематические виды компонентов подключаемого радиосвязного устройства, которое подключается к соответствующему предмету экипировки в соответствии с различными вариантами осуществления настоящего изобретения;
фигуры 8А-8В - схематические виды радиосвязного устройства, носимого оператором в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 9 - блок-схема способа установления связки между передатчиком беспроводного устройства дистанционного управления и приемником на электропогрузчике в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 10 - блок-схема одного из вариантов способа установления связки между передатчиком беспроводного пульта дистанционного управления и приемником на электропогрузчике в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 11 - блок-схема, иллюстрирующая один из вариантов способа временного выключения питания электропогрузчика, снабженного приемником, которому был назначен для работы передатчик беспроводного устройства дистанционного управления в соответствии с различными вариантами осуществления настоящего изобретения;
фигура 12 - блок-схема одного из вариантов способа прекращения связки между передатчиком беспроводного устройства дистанционного управления и приемником на электропогрузчике в соответствии с различными вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В нижеприведенном подробном описании даются ссылки на прилагаемые чертежи, которые составляют часть описания и всего лишь иллюстрируют конкретные варианты осуществления настоящего изобретения, ни в коем случае не ограничивая его объем. Необходимо также понимать, что могут использоваться и другие варианты осуществления изобретения и что могут быть внесены различные изменения без выхода за пределы объема и сущности настоящего изобретения.
Различные варианты настоящего изобретения относятся к беспроводным системам дистанционного управления, которые содержат беспроводное устройство дистанционного управления, носимое или иным образом прикрепленное к оператору для дистанционного управления работой подъемника-погрузчика, такого как электропогрузчик с вильчатым захватом. Кроме того, различные варианты настоящего изобретения относятся к системам, обеспечиваемым на подъемнике-погрузчике для выполнения команд беспроводного устройства дистанционного управления. Также описываются способы синхронизации и применения, обеспечивающие работу пользователя, использующего беспроводное устройство дистанционного управления, с подъемником-погрузчиком в соответствии с различными вариантами осуществления настоящего изобретения.
Как показано на фигурах и, в частности, на фигуре 1, погрузочно-разгрузочная машина, представляющая собой подъемник-погрузчик 10 с малой высотой подъема рабочих органов, предназначенный для комплектования заказов, содержит в общем случае узел 12 погрузки-разгрузки грузов, который отходит от силового блока 14. Узел 12 погрузки-разгрузки содержит вильчатый захват 16, состоящий из двух консолей, каждая из которых содержит узел 18 колеса. Узел 12 погрузки-разгрузки может содержать и другие погрузочно-разгрузочные устройства в дополнение к указанному вильчатому захвату 16 или вместо него, такие как, например, подъемная вилка по схеме ножниц, выносные опоры и грузовые консоли с раздельным регулированием по высоте, подъемная стойка, грузовая платформа, корзина для сбора товаров или другие опорные конструкции, поддерживаемые вильчатьм захватом 16 или иным образом обеспечиваемые для погрузки-разгрузки грузов, поддерживаемые и перемещаемые электропогрузчиком 10.
Силовой блок 14 содержит зону оператора 30 с первой концевой секцией 32, расположенной напротив вильчатого захвата 16, второй концевой секцией 34, расположенной возле вильчатого захвата 16, и проходной площадкой 36 оператора, отделяющей первую концевую секцию 32 от второй концевой секции 34. Первая рабочая зона находится возле первой концевой секции 32 силового блока 14 и содержит зону 40 управления для вождения электропогрузчика 10 и управления функциями узла 12 погрузки-разгрузки. Первая концевая секция 32 может также содержать первую зону 46 укладки, предназначенную, например, для фиксации свободно лежащих товаров, которые должны контролироваться оператором. В первой концевой секции 32 также имеется отсек 48, в котором содержится батарея, электронные схемы управления и электродвигатели, такие как ходовой двигатель, двигатель управления направлением движения электропогрузчика и двигатель привода вильчатого захвата (не показаны).
Как показано в данном варианте, являющемся только иллюстрацией изобретения и никоим образом не ограничивающем его объем, в зоне 40 управления имеется консоль 52 управления электропогрузчиком 10, которая может содержать такие органы управления, как ручки, многопозиционные переключатели, маховички, кулисные переключатели, рулевое колесо, рулевая ручка и другие органы, предназначенные для управления ускорением/торможением и направлением движения электропогрузчика 10. Например, как показано, на консоли 52 может быть ручка 54 переключателя, которая смещается пружиной в центральное нейтральное положение. Поворот ручки 54 вперед и вверх будет приводить к движению электропогрузчика 10, например вперед силовым блоком 14, со скоростью, пропорциональной углу поворота ручки 54. Аналогично поворот ручки 54 назад и вниз будет приводить к движению электропогрузчика назад, например вперед вильчатым захватом 16, со скоростью, пропорциональной углу поворота ручки 54. Также могут быть обеспечены органы управления для подачи звукового сигнала или выполнения других функций электропогрузчика.
Проходная площадка 30 оператора представляет собой платформу 56, на которой может стоять оператор при вождении электропогрузчика 10 и при управлении погрузочно-разгрузочными операциями. Могут также использоваться датчики 58 присутствия, например, на полу платформы 56, над ней, под ней или в других местах площадки 36 оператора для обнаружения нахождения оператора на электропогрузчике 10, как будет описано ниже более подробно. В варианте электропогрузчика, приведенном на фигуре 1, датчики 58 присутствия показаны пунктирными линиями, показывающими, что датчики расположены под платформой 56. В этом случае в качестве датчиков 58 присутствия могут использоваться датчики нагрузки, переключатели и т.п. В альтернативном варианте, датчики 58 присутствия могут быть установлены выше платформы 56 с использованием ультразвуковых, емкостных или других подходящих чувствительных элементов.
Вторая концевая секция 34 силового блока 16 может содержать опору для оператора или другую подходящую опорную конструкцию, поручень 62 и вторую зону 64 укладки. Для приема сигналов управления от соответствующего устройства 70 дистанционного управления, которое будут описано ниже более подробно, используется антенна 66. Как можно видеть на фигуре 1, радиосвязь обеспечивается подсоединением антенны 66 ко второй концевой секции 34 силового блока 14, например вдоль вертикально проходящей стойки 67, на которой может быть также установлен светильник 68. Размещение антенны 66 на стойке 67 над светильником 68 обеспечивает удобное расположение антенны для надежного радиоприема, устранение возможного влияния светильника 68 и его проводки, проходящей мимо антенны 66. В альтернативном варианте антенна 66 может быть установлена в другом месте электропогрузчика 10. Светильник 68 может использоваться для обеспечения информации о состоянии электропогрузчика 10 и/или о состоянии беспроводной связи между беспроводным устройством дистанционного управления и электропогрузчиком, синхронизированными надлежащим образом. Например, светильник может работать в режиме освещения, когда электропогрузчик движется, или в режиме мигания или в другом специальном режиме для индикации определенных условий.
Поручень 62 может использоваться оператором в качестве опорной конструкции, за которую оператор может держаться, когда он входит на электропогрузчик 10, сходит с него или управляет им. Кроме того, поручень 62 и другие элементы стойки, например может использоваться дополнительная скоба (не показана), проходящая в направлении первой концевой секции 32, могут использоваться для крепления различных принадлежностей, таких как сканеры, компьютеры, радиоустройства, связные и другие электронные устройства, светильники, планшеты, вентиляторы, контейнеры для вещей и другие необходимые рабочие или бытовые принадлежности, или другие вещи, необходимые для выполнения назначенных заданий. Например, поручень 62 или вся вторая концевая секция 34 может использоваться для установки дополнительных органов управления работой электропогрузчика 10.
Вариант конструкции электропогрузчика изображен на фигуре 1 лишь в качестве иллюстрации и никоим образом не ограничивает объем изобретения. На практике электропогрузчик 10 может иметь другую конструкцию и может быть снабжен другими устройствами, например может использоваться электропогрузчик для работы с поддонами, для управления которым используется удлинитель рулевого управления, соединенный с рулевой ручкой на электропогрузчике. В этой связи электропогрузчик 10 может иметь аналогичные или альтернативные устройства управления по сравнению с устройствами, показанными на фигуре 1.
В дополнение к светильнику 68 или вместо него вместе с системой дистанционного управления, описанной ниже более подробно, может использоваться акустический или оптический индикатор. Например, как можно видеть на фигуре 1, на электропогрузчике 10 может использоваться такой индикатор, как проблесковый светильник 72, который показан расположенным на второй концевой секции 34 силового блока 14. В альтернативном варианте такой индикатор может быть размещен в любом другом подходящем месте, например, на силовой опоре или на вертикальной стойке, например на стойке светильника 68, или в другой части электропогрузчика 10.
В проблесковом светильнике 72 может быть установлен однозначно определяемый режим работы, который связан с работой устройства дистанционного управления. В этом случае, если для управления работой электропогрузчика 10 не используется дистанционное устройство, то проблесковый режим может изменяться по сравнению со случаем, когда электропогрузчик 10 работает под управлением беспроводного дистанционного устройства. Например, проблесковый светильник 72 может быть выключен или может быть изменена интенсивность света или другие характеристики, если для управления работой электропогрузчика 10 беспроводное дистанционное устройство не используется. Или же светильник 72 может мигать, если работой электропогрузчика 10 управляют с помощью беспроводного устройства дистанционного управления. Частота, интенсивность или других характеристики работы светильника могут изменяться в зависимости от условий работы электропогрузчика, например может индицироваться движение, состояние неисправности и т.д. Как показано на фигуре 1, луч 74 света, создаваемый проблесковым светильником 72, направлен в общем случае вниз под углом в направлении вильчатого захвата 16. В этом случае мигающий свет не будет отвлекать внимание оператора или других работников, находящихся поблизости от электропогрузчика 10, например в рабочем проходе, в котором работает электропогрузчик 10, и в то же время будет виден оператору и другим работникам.
Кроме того, электропогрузчик 10 может содержать один или несколько датчиков 76 препятствий, которые устанавливаются по периметру электропогрузчика 10, например в передней части первой концевой секции 32 силового блока 14 и/или по бокам силового блока 14. В качестве датчиков 76 препятствий могут использоваться подходящие датчики сближения или контактные датчики, например ультразвуковые датчики, оптические датчики, инфракрасные датчики и др. Например, в качестве датчиков 76 препятствий могут использоваться ультразвуковые датчики Bosch URF6 и соответствующий контроллер.
Датчики 76 препятствий могут использоваться для обнаружения объектов, присутствующих в определенной зоне вокруг силового блока 14, такой как заданная зона 78 обнаружения, показанная на фигуре 1 пунктирными линиями. На практике дальности действия датчиков 76 препятствий могут различаться, и зоны 78 обнаружения датчиков могут перекрываться или могут быть расположены иным образом, в зависимости от конкретных вариантов реализации и выбора типа датчиков сближения. Например, датчики 76 препятствий, установленные в передней части силового блока 14, могут иметь дальность действия, находящуюся в диапазоне 0-5 футов (0-1,5 м), а дальность действия датчиков 76 препятствий, установленных по бокам силового блока 14, может находиться в диапазоне 0-2 фута (0-0,6 м). Кроме того, дальность действия датчиков 76 препятствий может быть регулируемой или иным образом может изменяться в процессе работы. Например, дальность действия датчиков 76 препятствий может быть увеличена при обнаружении определенных условий работы. Так, дальность действия датчиков 76 препятствий может регулироваться в зависимости от скорости движения электропогрузчика 10 при управлении им с помощью устройства дистанционного управления.
Кроме того, электропогрузчик 10 может быть снабжен одним или несколькими датчиками 80 присутствия груза. В качестве датчиков 80 присутствия могут использоваться датчики приближения или контактные датчики, например контактные датчики, датчики давления, ультразвуковые датчики, оптические датчики, инфракрасные датчики или иные подходящие датчики, обеспечивающие обнаружение присутствия соответствующей конструкции, удерживающей груз, например поддона или иной платформы, корзины для сбора товаров и т.п. Датчики 80 присутствия груза могут быть установлены в передней части силового блока 14, на силовой опоре или на другой подходящей несущей конструкции, расположение которой зависит от используемой технологии.
На фигуре 2 иллюстрируется блок-схема 100 системы управления, в которой обеспечивается управление электропогрузчиком 10 с помощью команд, передаваемых устройством дистанционного управления. Антенна 66 подсоединена к приемнику 102 для приема команд, передаваемых устройством 70 дистанционного управления. Из приемника 102 принятые команды передаются в контроллер 103, который осуществляет необходимые действия в соответствии с принятыми командами, например включает реле или другие электрические, магнитные, гидравлические, пневматические или иные управляющие устройства, или передает сообщения в другие компоненты электропогрузчика. Контроллер 103 может также принимать входные сигналы 104 от других источников, таких как переключатели, датчики положения и другие аналогичные устройства, имеющиеся на электропогрузчике 10, для определения необходимых действий в ответ на команды, принимаемые от устройства 70 дистанционного управления.
В одном из вариантов устройство 70 дистанционного контроля осуществляет беспроводную передачу в приемник электропогрузчика 10 запроса на движение, являющегося сигналом первого типа, также указываемого в настоящем описании как "сигнал перемещения" или "сигнал передвижения". Запрос на движение используется для запроса перемещения электропогрузчика 10 в первом направлении. Первое направление может быть определено, например, как перемещение электропогрузчика 10 силовым блоком 14 вперед, то есть вильчатый захват 16 будет находиться сзади по ходу движения. Однако в других вариантах могут быть определены альтернативные направления. Кроме того, электропогрузчиком 10 можно управлять для обеспечения в целом прямолинейного движения или движения в заранее определенном направлении.
Сигнал первого типа поступает в приемник 102 и передается из него в контроллер 103. Если контроллер 103 определяет, что полученный сигнал перемещения является верным сигналом перемещения и что текущие параметры электропогрузчика являются подходящими для этого (объясняется ниже), контроллер 103 передает сигнал в соответствующие устройства управления электропогрузчика 10 для его перемещения и последующей остановки. Как будет более подробно описано ниже, остановка электропогрузчика 10 может быть осуществлена после движения по инерции или с использованием тормозов.
Например, контроллер 103 может быть соединен с системой управления тягой, указанной на фигуре 2, как контроллер 106 тягового двигателя электропогрузчика 10. После получения сигнала первого типа из приемника 102 контроллер анализирует по меньшей мере один параметр электропогрузчика для и принимает решение на выполнение запроса на движение на основе анализа параметра(ов) электропогрузчика и передает в систему управления движением команду на перемещение электропогрузчика, если такое решение принято.
Контроллер 106 тягового двигателя соединен с тяговым двигателем 107, который приводит в движение по меньшей мере одно управляемое колесо 108 электропогрузчика 10. Контроллер 103 может обмениваться информацией с контроллером 106 тягового двигателя таким образом, чтобы обеспечивать ограничение скорости электропогрузчика 10 при выполнении запроса на движение, полученного из устройства 70 дистанционного управления. Например, скорость перемещения электропогрузчика 10 может быть ограничена обычной скоростью ходьбы человека, в частности скоростью порядка 2,76 миль/час (4,4 км/час).
Могут возникать шумы и/или помехи, например, вызванные использованием других беспроводных систем дистанционного управления поблизости от электропогрузчика 10. В этом случае в приемнике 102 или в контроллере может выполняться анализ принятых сигналов для различения верных сигналов движения и сигналов помех. Например, контроллер 103 может определить, что приемник 102 принял сигнал движения не на выделенной частоте или не в выделенном канале. Кроме того, в запросе на движение может быть записан идентификационный код оператора и/или передатчика, как это будет описано ниже. В таком случае контроллер 103 может быть оперативно запрограммирован на выполнение только тех сообщений, в которых записаны определенные идентификационные коды, или на игнорирование команд с определенными идентификационными кодами.
Кроме того, уровень полученного сигнала, содержащего запрос на перемещение, может быть слишком высоким или слишком низким, чтобы считать его верным сигналом. Например, если уровень сигнала слишком высокий, это может означать, что оператор находится слишком близко от электропогрузчика 10, что не позволяет начать движение в автоматизированном режиме. Соответственно, если сигнал слишком слабый, это может означать, что оператор находится слишком далеко от электропогрузчика 10, и поэтому дистанционное управление не разрешается.
Кроме того, контроллер 103 может ожидать сигнала подтверждения или запрашивать сообщение от устройства 70 дистанционного управления, которое не было получено в отведенный для него интервал времени. Например, контроллер 103 может быть соединен с передатчиком 109 на электропогрузчике 10 для обеспечения двухстороннего обмена информацией с беспроводным устройством 70 дистанционного управления. В таких и аналогичных ситуациях контроллер 103 может принимать решение об игнорировании принятого запроса на движение, если не получено подтверждение по результатам двухстороннего обмена информацией. Кроме того, двухсторонний обмен информацией может использоваться для синхронизации приемника 102 электропогрузчика 10 с соответствующим беспроводным устройством 70, как это будет подробно описано ниже.
Контроллер 103 может также не подтвердить запрос на движение на основе анализа параметров электропогрузчика, которые связаны с окружающей средой и или с рабочим состоянием электропогрузчика. Например, контроллер 103 может игнорировать или иным образом не выполнять верный запрос на перемещение на основе информации, полученной от одного или нескольких датчиков 58, 76, 80. В этой связи датчики 58, 76, 80 и др. могут быть подсоединены к контроллеру 103 через входы 104 или по подходящей сети электропогрузчика, такой как шина 110 локальной сети управления (CAN). Таким образом, при обработке принятых команд и принятии решений на их выполнение контроллер 103 может учитывать любое другое количество параметров.
Шина CAN обеспечивает удобную платформу для контроллера 103 электропогрузчика 10, обеспечивающую обмен информацией с любой системой или модулем электропогрузчика, соединенными с шиной 110, для принятия решения о выполнении команд, принятых из устройства 70 дистанционного управления. Кроме того, соответствующая информация, полученная из систем и модулей электропогрузчика 10, может быть передана в устройство 70 дистанционного управления с использованием передатчика 110 электропогрузчика для передачи информации в соответствующий приемник в устройстве 70.
Протокол сети CAN является удобной платформой для погрузочно-разгрузочных машин, поскольку в нем отсутствует адресация абонентов или станций, принятая в обычной сети. Вместо этого в сети CAN задается система приоритетов передаваемых сообщений, причем приоритет определенного сообщения, передаваемого в циркулярном режиме по шине CAN, определяется соответствующим идентификационным кодом сообщения. Сообщение, передаваемое первым модулем, может быть принято всеми узлами или модулями, подсоединенными к шине CAN. Таким образом, контроллер 103 может принимать "интеллектуальные" решения в отношении беспроводного устройства 70 дистанционного управления и/или в отношении обмена информацией с соответствующим назначенным устройством 70 на основе любого количества параметров, состояний, условий и т.п., которые могут быть переданы по шине CAN.
В альтернативном варианте сеть может содержать любую другую систему шины, например локальной сети связи (LIN) или локальной сети транспортных средств (VAN) и др., или возможности связи, такие как система проводки шины, другая среда распространения сигнала или другая сеть управления. В этом случае различные контроллеры и электронные схемы на электропогрузчике 10 могут обмениваться информацией между собой с использованием циркулярного, адресного или иного режима передачи.
После подтверждения действительного запроса на движение контроллер 103 взаимодействует с контроллером 106 тягового двигателя, например, через шину CAN или через другие средства передачи информации для перемещения электропогрузчика 10. В зависимости от конкретного варианта осуществления контроллер 103 может взаимодействовать с контроллером 106 тягового двигателя для перемещения электропогрузчика 10 на определенное расстояние. В альтернативном варианте контроллер 103 может взаимодействовать с контроллером 106 тягового двигателя для перемещения электропогрузчика 10 в течение некоторого интервала времени при обнаружении продолжающегося включения одного из органов управления на устройстве 70 дистанционного управления. Кроме того, электропогрузчик 10 может быть сконфигурирован таким образом, чтобы обеспечивалось его перемещение при продолжающемся получении управляющего сигнала на перемещение. Однако контроллер 103 может быть также сконфигурирован таким образом, чтобы в нем устанавливалось "время ожидания" и чтобы он прекращал движение электропогрузчика 10 при наступлении определенного события, например при превышении заданного интервала времени или заданного пройденного расстояния, независимо от поддержания во включенном состоянии соответствующего органа управления на устройстве 70. Могут быть осуществлены и другие альтернативные варианты алгоритма управления для расстояния и длительности движения электропогрузчика 10 и его скорости при работе в режиме дистанционного управления, и ниже подробно рассматриваются примеры таких вариантов.
Контроллер 103 может также обмениваться информацией по шине CAN 110 иным образом для обеспечения управления траекторией движения электропогрузчика 10 с помощью системы рулевого управления. Например, контроллер 103 может обмениваться информацией с контроллером 112 рулевого управления для передачи команд или для иного управления двигателем 114 рулевого управления или с другим подходящим устройством управления, которое также связано с управляемыми колесами 108 электропогрузчика 10. Например, контроллер 103 может установить электропогрузчик 10 для движения по прямой или задать угол поворота, прежде чем беспроводное устройство дистанционного управления начнет управление движением электропогрузчиком или в процессе такого управления. В этом случае контроллер 103 может не выполнять режим работы, в котором электропогрузчик движется прямолинейно или в заданном направления, когда управление электропогрузчиком 10 осуществляют с помощью беспроводного устройства дистанционного управления, при получении запроса на движение. Контроллер 103 может также устанавливать предельное значение угла поворота при дистанционном управлении, если электропогрузчик 10 должен двигаться в направлении, для которого управляемые колеса 108 должны быть повернуты под углом. Например, контроллер 103 может ограничивать угол поворота электропогрузчика 10 при выполнении команд дистанционного управления в диапазоне от примерно 5 градусов до примерно 10 градусов. Таким образом, в дополнение к управлению работой тягового двигателя 107 контроллер 103 может также спрямлять траекторию движения или иным образом задавать положение управляемого колеса 108.
Устройство 70 дистанционного управления также может передавать сигнал второго типа, такой как "сигнал остановки", указывающий на то, что электропогрузчик 10 должен тормозить и/или иным образом остановиться. Сигнал второго типа также может подразумеваться, например, после выполнения команды "движение". Сигнал второго типа принимается в приемнике 102 и передается из него в контроллер 103. Если контроллер 103 определяет, что принятый сигнал остановки является верным сигналом останова, он передает сигнал в систему управления тормозами, например по шине CAN или иным образом. Например, контроллер 103 может обмениваться информацией с контроллером 116 тормозной системы электропогрузчика 10 для обеспечения его остановки с помощью соответствующего тормозного устройства 117. В альтернативном варианте сигнал второго типа может содержать команду "движение по инерции", означающую, что электропогрузчик 10 должен двигаться по инерции до полной остановки. Например, если контроллер 103 определяет, что сигнал движения инерции является верным сигналом, то контроллер 103 может отключить привод электропогрузчика 10, например, путем выдачи команды в контроллер 106 тяги на прекращение выдачи сигнала привода в тяговый двигатель 107, но при этом электропогрузчик 10 будет двигаться по инерции, замедляясь до полной остановки. Любое другое количество параметров или факторов может учитываться контроллером 103 при обработке принятых сигналов остановки или движения по инерции и принятии решений на их выполнение.
Время, которое потребуется электропогрузчику 10 для полной остановки, может варьироваться в зависимости, например, от выполняемой задачи, условий окружающей среды, характеристик конкретного электропогрузчика 10 и некоторых других факторов. Например, после осуществления соответствующего перемещения может оказаться необходимым дать электропогрузчику 10 возможность пройти по инерции некоторое расстояние до полной остановки, так что он останавливается медленно. В этом случае может использоваться регенеративное торможение для постепенного останова электропогрузчика 10, так что он может пройти некоторое расстояние из заданного диапазона расстояний от начала процедуры остановки электропогрузчика 10 до его окончательной остановки. В альтернативном варианте процедура торможения может выполняться после заданной временной задержки для обеспечения прохождения электропогрузчиком 10 дополнительного расстояния после начала процедуры остановки. Также может оказаться необходимым обеспечить сравнительно быструю остановку электропогрузчика 10, например, если обнаружено препятствие на пути движения электропогрузчика 10, или необходима немедленная остановка после выполнения процедуры перемещения. Например, контроллер может задавать определенный тормозящий момент для процедуры торможения. В этом случае контроллер 103 передает в контроллер 116 тормозной системы команду на включение тормозов 117 для остановки электропогрузчика 10.
Кроме того, если выполняется функция выключения электропогрузчика, то он может быть остановлен с максимально возможным торможением. Например, беспроводное устройство 70 дистанционного контроля может содержать функцию выключения, обеспечивающую передачу команды на торможение и/или выключение электропогрузчика 10. При выполнении команды выключения на электропогрузчике 10 также может выключаться главный контактор 118, используемый для включения питания электропогрузчика 10. При таком варианте может потребоваться выполнение на электропогрузчике процедуры перезапуска, например, с использованием кнопочного переключателя или другого подходящего органа управления для повторной инициализации процедуры запуска. Контроллер 103 может также взаимодействовать и с другими выходными системами 119 электропогрузчика для осуществления необходимых функций, например, для управления звуковым сигналом, светильником, средствами индикации информации и т.п. При этом контроллер 103 может взаимодействовать с различными компонентами электропогрузчика 10, с оператором и с беспроводным устройством 70 дистанционного управления для выполнения различных алгоритмов движения, остановки, движения по инерции и включения питания.
Как уже указывалось, контроллер 103 может обмениваться информацией с контроллером 116 тормозной системы для обеспечения остановки электропогрузчика 10 в различных условиях с помощью тормозного устройства 117. Например, выходные сигналы датчиков 76 препятствий (объектов) могут не учитываться, когда оператор управляет электропогрузчиком 10 для обеспечения управления движением электропогрузчика в тесных пространствах и вокруг углов, которые могут вызывать срабатывание одного или нескольких датчиков 76 препятствий. Однако использование выходных сигналов датчиков 76 препятствий может быть эффективным, и они учитываются контроллером 103, когда по информации датчиков оператора нет на электропогрузчике 10. В этом случае контроллер 103 может обмениваться информацией с контроллером 116 тормозной системы для остановки электропогрузчика 10, если контроллер 103 определит, что на пути движения электропогрузчика 10 находится препятствие, например, препятствие, обнаруженное датчиком 76 препятствий, при движении в соответствии с запросом на движение, полученным от устройства 70 дистанционного управления.
Кроме того, контроллер 103 может отказать в выполнении запроса на движение, полученного от соответствующего беспроводного устройства 70 дистанционного управления, если датчики 58 присутствия обнаруживают присутствие на электропогрузчике человека, или если датчики 80 наличия груза сигнализируют о том, что соответствующая грузовая платформа, например поддон, не установлена в нужном положении на вильчатом захвате электропогрузчика. Также контроллер 103 может обмениваться информацией с контроллером 116 тормозной системы для остановки электропогрузчика 10, если датчики 80 присутствия груза сигнализируют о смещении грузовой платформы из заданного положения.
Устройство 70 дистанционного управления, приемник 102 и передатчик 109 могут осуществлять связь в некотором диапазоне частот, что обеспечивает возможность работы устройства 70 и соответствующего электропогрузчика 10 на частоте или на частотах, на которых минимальны помехи от внешних источников. Кроме того, для обеспечения взаимодействия между электропогрузчиком 10 и устройством 70 дистанционного управления могут использоваться различные технологии беспроводной связи, включая технологии передачи с расширенным спектром сигналов.
Например, для обеспечения радиосвязи между передатчиком устройства 70 и приемником электропогрузчика 10 может использоваться технология Bluetooth или другие системы связи, построенные на основе Bluetooth. Bluetooth и другие аналогичные технологии связи обеспечивают управление уровнем выходной мощности, регулируемую выходную мощность, использование каналов поднесущих частот и скачкообразного изменения частоты для уменьшения вероятности возникновения шумов и других помех в рабочей зоне. Полоса частот Bluetooth может также упростить передачу информации речевого управления, как это будет описано ниже.
Если электропогрузчик 10 снабжен удлинителем рулевого управления вместо описанного рулевого управления, то в этом случае на электропогрузчике может использоваться тормоз рулевого управления. В этом случае может использоваться также устройство блокировки рулевого управления для перевода электропогрузчика в режим движения по инерции при использовании дистанционного управления, например, как это описано в патенте США №6595306.
На фигуре 3 показано, как устройство 70 дистанционного управления и соответствующий приемник 102 могут быть сконфигурированы для обеспечения беспроводного управления на заданном расстоянии. Электропогрузчик 10 расположен в типичном проходе 120 товарного склада, в котором имеются места 122 расположения запасов различных товаров по обеим сторонам прохода 120. Как можно видеть, устройство 70 дистанционного управления может обмениваться информацией с электропогрузчиком 10 в круговой зоне, обозначенной пунктирной линией 130. Размеры зоны могут изменяться в зависимости от конкретного варианта. Например, дальность действия может определяться ожидаемым расстоянием, на которое оператор может отходить от электропогрузчика 10 для отбора товаров в процессе комплектования заказов. В рассматриваемом примере эта дальность может составлять примерно 26 футов (7,62 м). Кроме того, дальность действия необязательно должна быть одной и той же во всех направлениях и во всех условиях. Например, зона действия может иметь эллиптическую форму или иную форму с явно выраженным определенным направлением. Кроме того, может существовать минимальная дальность, на которой работа беспроводной системы дистанционного управления прекращается. Как уже указывалось, контроллер 130 может различать сигналы, имеющие слишком высокий уровень, что может означать, что оператор находится на электропогрузчике 10 или слишком близко к нему, так что дистанционное управление следует прекратить. В качестве примера, когда дальность действия может определяться условиями работы и окружающей средой, можно указать скорость электропогрузчика, когда электропогрузчик находится внутри тесного пространства и т.п.
Может оказаться необходимым установить или иным образом запрограммировать дальность действия датчиков 76, обеспечивающих обнаружение препятствий на пути движения электропогрузчика 10, когда он движется в соответствии с запросом на движение, полученным от устройства 70 дистанционного управления. Например, как показано на фигуре 3, каждый из датчиков 76 настроен таким образом, чтобы он обнаруживал объекты на пути движения электропогрузчика на расстоянии, которое схематически указано пунктирной линией, обозначающей зону обнаружения, прилегающую к датчикам 76. Датчики 76 препятствий, расположенные по бокам электропогрузчика 10, не показаны, чтобы не загромождать чертеж. Кроме того, можно запрограммировать, чтобы дальность действия датчиков 76 изменялась статически или динамически. Например, дальность действия датчиков 76 препятствий может изменяться, по мере того как изменяется скорость электропогрузчика 10 в соответствии с принятыми командами на движение и т.п.
Для каждого включения запроса на движение на устройстве 70 дистанционного управления оператор может переместить электропогрузчик 10, не тратя время на то, чтобы подойти к нему и воспользоваться находящимися на нем органами управления. Например, после выдачи запроса на передвижение с устройства 70 дистанционного управления оператор может идти сразу к месту нахождения других товаров, которые необходимо отобрать, или к месту выполнения другого задания. Электропогрузчик 10 будет автоматически передвигаться вперед на расстояние, соответствующее запросу на его движение. Например, если получена команда на перемещение на заданное расстояние, то после такого перемещения электропогрузчик 10 останавливается самостоятельно без необходимости получения отдельной команды оператора на остановку. В альтернативном варианте электропогрузчик 10 может продолжать двигаться, пока устройство 70 продолжает передавать команду на перемещение, то есть кнопка движения остается нажатой. В этом последнем случае электропогрузчик 10 продолжает движение до тех пор, пока оператор не отпустит кнопку движения или же он нажмет кнопку остановки или движения по инерции, или истечет заданное максимальное время непрерывного движения, или же будет задано некоторое другое действие, требующее остановки электропогрузчика 10.
Например, в первом варианте взаимодействия оператора с электропогрузчиком 10 предполагается, что оператор движется вместе с электропогрузчиком 10 по проходу 120. Первый ряд 142 мест 122 хранения находится на первой стороне электропогрузчика 10. Второй ряд 144 мест 122 хранения находится на второй стороне электропогрузчика 10. Первый и второй ряды, 142 и 144, соответственно, мест 122 хранения содержат отдельные зоны хранения запасов товаров, которые могут представлять собой корзины, поддоны, размеченные или иным образом обозначенные зоны и т.п. Кроме того, каждое место 122 хранения запаса товаров может содержать несколько зон хранения, разделенных по вертикали, как это практикуется в товарных складах или распределительных центрах. В этом случае может быть несколько уровней хранения запасов товаров в каждом месте 122 хранения. При автоматизированном управлении электропогрузчиком 10 с помощью устройства 70 дистанционного управления он движется по проходу 120. Например, как показано на фигуре 3, электропогрузчик 10 движется силовым блоком 114 вперед в направлении, обозначенном стрелкой 132. Таким образом, вильчатый захват 16 направлен назад по ходу движения электропогрузчика 10. Могут осуществляться и другие направления движения.
Предположим, что оператор находится сначала в точке А и что товар необходимо отобрать из места 122 хранения, обозначенного "122-1", в ряду 144. Оператор идет из точки А к месту хранения "122-1", для того чтобы забрать там необходимый товар. После того как необходимый товар отобран, оператор находится в точке В, как раз напротив места "122-1" хранения. Далее, предположим, что оператор переместил или перемещает электропогрузчик 10, используя устройство 70 дистанционного управления таким образом, чтобы грузовая платформа 146, которая находится на вильчатом захвате 16 электропогрузчика 10, располагалась в положении С, рядом с точкой В. Оператору нет необходимости в переноске к электропогрузчику каких-либо товаров заказа, когда он идет из точки А к месту "122-1" хранения. Кроме того, когда оператор приходит в точку В с товаром, взятым в месте "122-1" хранения, электропогрузчик 10 уже остановился в точке С. Таким образом, оператору нужно будет перенести взятый товар лишь на коротком расстоянии от места "122-1" хранения до точки В.
После размещения отобранного товара на грузовой платформе 146 электропогрузчика 10 оператор может подняться на электропогрузчик и направлять его к следующему месту хранения, или же, если в проходе 120 имеются еще товары, которые должны быть отобраны, оператор может продолжать использовать устройство 70 дистанционного управления.
Продолжая рассматриваемый пример, считаем, что оператор находится теперь в положении В и что товар необходимо отобрать из места 122 хранения, обозначенного "122-2", в ряду 142. Оператор идет из точки В к месту "122-2" хранения, для того чтобы забрать там необходимый товар. Кроме того, оператор инициирует передачу запроса на движение, например, используя устройство 70 дистанционного управления для беспроводной передачи сигнала первого типа ("движение") в приемник электропогрузчика 10. К тому времени когда оператор дойдет до точки D и отберет товар из места "122-2" хранения, электропогрузчик 10 переместится по команде устройства 70 дистанционного управления из точки С и остановится в точке Е, находящейся рядом с точкой D. И снова, оператор размещает отобранный товар на грузовой платформе 146 электропогрузчика 10, причем и в этом случае минимизируется расстояние, которое оператор должен проходить с отобранным товаром в руках.
Кроме того, при заблаговременном перемещении электропогрузчика 10 может быть сокращено время, необходимое для отбора товаров в проходе 120, поскольку оператору нет необходимости в прерывании процесса отбора для перемещения или разворота электропогрузчика 10. Кроме того, что, как показано схематически на фигуре 3, однократное включение органа управления движением на устройстве 70 дистанционного управления может обеспечить перемещение электропогрузчика 10 на расстояние S1 с последующей остановкой. В этом случае после включения органа управления движением на устройстве 70 дистанционного управления электропогрузчик 10 располагается в удобном для оператора месте, обеспечивающем укладку отобранных товаров таким образом, что минимизируется расстояние, которое оператор должен пройти с отобранными товарами в руках. Кроме того, поскольку оператору не нужно прерывать процесс отбора товаров или выполнение других задач, связанных с комплектованием заказа, он может сэкономить силы и время при выполнении поставленной задачи, например, по сравнению с режимом работы, при котором оператор должен постоянно прерывать работу для перемещения электропогрузчика к следующему месту хранения.
Одним из показателей производительности работы оператора является время, в течение которого оператор находится у каждого места хранения. А именно, как соотносится время, потраченное на комплектование заказа, со временем, потраченным на перемещение электропогрузчика 10 и выполнение других задач, не связанных непосредственно с нахождением и погрузкой отбираемых товаров. Как это уже очевидно из вышеизложенного, время, необходимое на перемещение электропогрузчика 10, сокращается, что позволяет оператору тратить больше времени на отбор товаров. Кроме того, электропогрузчиком 10 можно управлять дистанционно таким образом, чтобы он всегда останавливался перед оператором, в результате чего оператор будет работать впереди части электропогрузчика 10, на которой располагается груз. В этом случае будет минимизироваться расстояние, которое оператор должен проходить, для того чтобы отобрать и загрузить товары, и еще больше сокращается расстояние, которое должен проходить оператор с отобранными товарами в руках. Этот момент может быть существенным, особенно в тех случаях, когда длина вильчатого захвата 16 электропогрузчика 10 относительно велика. Так, длина некоторых вильчатых захватов 16 может быть рассчитана на размещение трех грузовых платформ, например трех поддонов.
Кроме того, система программного обеспечения управления складом, которая направляет операторов при выполнении ими комплектования заказов, может учитывать дистанционное управление электропогрузчиками 10 при планировании комплектования заказов, так что положительный эффект использования дистанционного управления может быть дополнительно усилен более эффективной работой программ при подготовке заданий на комплектование заказов.
Как показано на фигуре 4, в соответствии одним из вариантов осуществления настоящего изобретения на складе или в других помещениях и/или на электропогрузчике 10 могут быть установлены дополнительные устройства, обеспечивающие повышение эффективности работы. Например, функция беспроводного дистанционного управления может быть отключена в некоторых зонах рабочего помещения, таких как концы проходов между местами хранения товаров, пересечения проходов, площадки погрузки-разгрузки товаров, зоны, в которых может быть интенсивное движение людей и т.п. Для иллюстрации варианта осуществления такого режима работы допустим, что беспроводное дистанционное управление движением электропогрузчиком 10 должно быть отключено, когда он приближается к концу прохода 120. Для отключения беспроводного дистанционного управления электропогрузчиком 10 в заданной зоне он снабжается одним или несколькими устройствами 148, такими как антенны радиочастотной идентификации (RFID). Соответствующие метки RFID 150 устанавливаются в конце прохода в нужных местах.
Устройства 148 вырабатывают сигналы при обнаружении конца прохода, например, при обнаружении соответствующих меток RFID 150, и эти сигналы вызывают остановку электропогрузчика 10 в том случае, когда его движением управляют с помощью беспроводного устройства дистанционного управления. Например, сигналы от устройств 148 могут подаваться на соответствующие входы 104 контроллера 103. Так, если контроллер 103 обнаруживает соответствующий сигнал, поступивший от одного из устройств 148, и контроллер 103 определяет, что движение электропогрузчика 10 осуществляется в настоящий момент по запросу на движение, поступившему от устройства 70 дистанционного управления, то контроллер 103 может передать соответствующую команду в контроллер 116 тормозной системы для остановки электропогрузчика 10.
В рассматриваемом примере, проход 120 имеет ширину 15 футов (примерно 4,6 м), и антенны 148 настроены таким образом, чтобы они обнаруживали соответствующие метки 150 на дальности 13 футов (примерно 3,9 м). В этом случае обеспечивается достаточное перекрытие в проходе 120 и для электропогрузчика 10 имеется достаточное расстояние для торможения или остановки иным образом перед концом прохода. На практике могут использоваться и другие дальности, которые могут зависеть, например, от требований остановки электропогрузчика 10 и варианта осуществления соответствующего беспроводного устройства дистанционного управления, используемой технологии обнаружения меток и некоторых других факторов.
На фигуре 5 приведена блок-схема способа 200 осуществления функции движения электропогрузчика. Способ 200 может быть реализован, например, в контроллере 103 на электропогрузчике 10. Как уже указывалось, контроллер 103 обеспечивает передвижение электропогрузчика 10 при получении запроса на движение от устройства 70 дистанционного управления, если только выполняется по меньшей мере одно условие. В способе 200 задаются различные условия работы электропогрузчика, которые могут влиять на обработку контроллером 103 запросов на движение, поступающих от устройства 70 дистанционного управления.
Процесс находится в ожидании прихода запроса на движение (стадия 202). Если запрос на движение не получен, то ожидание продолжается. Если получен запрос на движение, то либо он выполняется, либо осуществляются дополнительные проверки или анализ условий работы электропогрузчика для определения необходимости подтверждения или осуществления иным образом запроса на движение, примеры которых представлены на стадиях 204, 206, 208 и 210.
Например, в результате выполнения способа может потребоваться выполнить остановку электропогрузчика перед распознаванием нового запроса на движение. Это требование условия состояния электропогрузчика может быть осуществлено, например, если контроллер 103 устанавливает ограничение на максимальную величину непрерывного перемещения электропогрузчика без остановки при получении сигнала первого типа ("движение") в случае дистанционного управления с помощью беспроводного устройства. В этой связи контроллер 103 может определять на стадии 204, остановлен ли электропогрузчик, например с использованием информации от датчика положения или другого подходящего устройства, позволяющего определить состояние движения электропогрузчика. Если электропогрузчик движется, то процесс может дополнительно ожидать, пока электропогрузчик не остановится, или же процесс может игнорировать или иным образом прекратить анализ необходимости выполнения принятого запроса на движение, как показано пунктирными линиями.
Кроме того, при выполнении процесса может потребоваться не только, чтобы электропогрузчик был остановлен, но также чтобы электропогрузчик стоял в течение некоторого заданного времени. Так, например, если электропогрузчик стоит, то процесс может определять, прошел ли заданный интервал времени после обнаружения на стадии 206 того, что электропогрузчик остановился. Если заданный интервал времени еще не истек, то процесс может ожидать истечения этого интервала, или же процесс может игнорировать или иным образом прекратить обработку принятого запроса на движение, как показано пунктирными линиями.
Процесс может также проверять на стадии 208 такие условия работы электропогрузчика, как характеристики работы и/или параметры окружающей среды, которые могли бы повлиять на работу электропогрузчика при выполнении дистанционного запроса на движение. Если проверка условий работы электропогрузчика показывает, что можно продолжать обработку принятого запроса на движение, то обработка продолжается. В противном случае, процесс может перейти в ожидание, пока условие не изменится, или же может игнорировать или иным образом прекратить обработку принятого запроса на движение, как показано пунктирными линиями.
Условия работы электропогрузчика и характеристики окружающей среды, которые могут привести к тому, что процесс будет игнорировать или иным образом прекращать обработку запроса на движение, принятого от устройства 70 дистанционного управления, могут включать следующие факторы: обнаружение оператора на платформе, обнаружение объекта на пути движения электропогрузчика, обнаружение с использованием меток RFID (см. фигуру 4) нахождения электропогрузчика в зоне, в которой не допускается использование беспроводного устройства дистанционного управления, например, в конце прохода или на пересечении проходов, обнаружение отсутствия поддона или другой подходящей грузовой конструкции на вильчатом захвате электропогрузчика, обнаружение подключения к электропогрузчику неразрешенного оператора и/или синхронизации электропогрузчика с неразрешенным пользователем, обнаружение выхода уровня принятого сигнала, содержащего запрос на движение, за пределы установленного диапазона, например, сигнал слишком слабый, что означает, что оператор вышел за пределы разрешенной дальности работы, или сигнал слишком сильный, что означает, что оператор находится слишком близко от электропогрузчика и т.п. Таким образом, оператор может ожидать, убрать препятствие с пути движения электропогрузчика или иным образом устранить условие, прежде чем электропогрузчик будет готов выполнять дистанционные запросы на движение.
Процесс также может осуществлять на стадии 210 проверку того, что угол поворота электропогрузчика находится в диапазоне разрешенных углов поворота. Если управляемые колеса электропогрузчика повернуты на угол, выходящий за пределы диапазона разрешенных углов, то на стадии 212 угол поворота может быть скорректирован. В альтернативном варианте система может установить управляемое колесо в заданное положение, например, для прямолинейного движения, или же система может игнорировать или иным образом прекратить обработку полученного запроса на движение.
Затем на стадии 214 электропогрузчик перемещается вперед. Например, если контроллер определяет, что каждое проверяемое условие работы электропогрузчика соблюдается и дистанционный запрос на движение может быть выполнен, то контроллер обеспечивает осуществление системой управления тягой движения электропогрузчика. Электропогрузчик также может вырабатывать звуковой предупредительный сигнал или другие виды предупредительных сигналов, когда он движется, выполняя команды, полученные от устройства дистанционного управления, или когда управление движением на устройстве 70 дистанционного управления остается задействованным, при этом может использоваться светильник 68 и/или сигнализатор, такой как проблесковый светильник 72. Кроме того, устройство, вырабатывающее звуковой сигнал или другие виды предупредительных сигналов, может управляться реле или другими подходящими переключающими устройствами, обеспечивающими их работу вместе с работой тягового двигателя, когда управление электропогрузчика осуществляется дистанционно с помощью беспроводного устройства.
Процесс проверяет на стадии 216, произошло ли заданное событие, после которого необходима остановка. Например, процесс может проверять, не отключил ли оператор орган управления движением на устройстве 70 дистанционного управления. Если орган управления движения отключен, то электропогрузчик останавливается, например, с помощью тормозов, после движения по инерции или после выполнения иных подходящих процедур, обеспечивающих остановку. Процесс может также проверять на стадии 216, истек ли временной интервал, заданный для движения, пройдено ли заданное расстояние, или произошло ли другое аналогичное событие в процессе движения электропогрузчика при выполнении запроса, полученного от беспроводного устройства дистанционного управления.
Например, для электропогрузчика может быть задано максимальное расстояние непрерывного движения при выполнении одиночного запроса на движение, полученного от беспроводного устройства дистанционного управления. В другом случае для электропогрузчика может быть задано максимальное расстояние непрерывного движения при выполнении ряда последовательных запросов на движение, полученных от беспроводного устройства дистанционного управления. Такое максимальное расстояние может составлять 25-50 футов (примерно 7,6-15,2 м). В другом случае для непрерывного движения электропогрузчика может быть задано максимальное время непрерывного движения.
Остановка может быть необходима также после наступления следующих событий: превышение заданных предельных характеристик движения, получение команды на остановку или на выключение дистанционного управления, обнаружение препятствия на пути движения электропогрузчика 10, обнаружение человека на электропогрузчике, обнаружение изменения положения грузового устройства, например поддона или клетки, обнаружение отклонений в работе механических, электрических, пневматических, гидравлических систем электропогрузчика и т.д. Если на стадии 216 обнаружено событие, требующее остановки, то электропогрузчик останавливается или двигается по инерции на стадии 218, и система сбрасывается в исходное состояние. Если оператор передает запрос на движение с беспроводного устройства 70 дистанционного управления до завершения выполняемой задачи, то система может ожидать завершения текущей задачи, прежде чем передавать следующую команду.
В соответствии с различными вариантами осуществления настоящего изобретения устройство 70 дистанционного контроля представляет собой беспроводное устройство, носимое оператором для обеспечения взаимодействия с электропогрузчиком. В общем случае носимое беспроводное устройство дистанционного управления может содержать беспроводный передатчик и орган управления движением, например, кнопочное или иное переключающее устройство, соединенное с беспроводным передатчиком с возможностью передачи информации между ними. Как будет описано ниже более подробно, нажатие кнопки движения вызывает передачу беспроводным передатчиком сигнала первого типа, представляющего запрос на движение электропогрузчика в первом направлении. В зависимости от конкретного варианта осуществления беспроводное устройство дистанционного управления может также содержать блок питания, например батарею, для обеспечения электропитания электронных схем устройства дистанционного управления, зону управления, в которой орган управления движением располагается на операторе, например на кисти руки оператора или возле нее, и соединительное устройство между передатчиком и зоной управления, когда передатчик находится на некотором расстоянии от зоны управления, когда беспроводное устройство находится на операторе.
Как можно видеть на фигуре 6, в одном из вариантов предмет 250 экипировки оператора представляет собой конструкцию, похожую на перчатку, которую оператор носит на руке. Показанный предмет 250 экипировки содержит зону 252 первого органа управления, зону 254 подключения, которая поддерживает съемный передатчик, блок питания и соединительное устройство, представляющее собой электрическую цепь 256, соединяющую первую 252 зону управления с зоной подключения. Как можно видеть, зона 252 первого органа управления содержит первый орган 258 управления, например кнопку, которая располагается сбоку от части предмета 250 экипировки, в которой находятся пальцы оператора. В рассматриваемом варианте кнопка выступает из части перчатки, в которой проходит указательный палец оператора электропогрузчика, когда перчатка надета надлежащим образом. Кнопка расположена таким образом, что ее рабочая поверхность обращена в сторону большого пальца оператора электропогрузчика. Как ниже будет описано более подробно, такая конфигурация позволяет оператору электропогрузчика доставать и нажимать первый орган 258 управления большим пальцем, то есть оператор может пользоваться устройством 70 дистанционного контроля с помощью простого движения пальцем. Кроме того, как ниже будет описано более подробно, такое движение пальцем может быть осуществлено при выполнении рабочих операций, таких как удерживание или переноска коробок, сканирующих устройств, инструментов и т.п.
Зона 254 подключения содержит контактные площадки 260, которые электрически соединены с зоной 252 первого органа управления с помощью электрической цепи 256. В одном из вариантов электрическая цепь 256 может содержать гибкий электрический проводник, который интегрирован или иным образом внедрен в материал предмета 250 экипировки. Электрическая цепь 256 несет на себе одну или несколько антенн 262. Зона 254 подключения имеет такую форму, чтобы в нее можно было ввести и закрепить с возможностью съема соответствующее радиосвязное устройство 264. Например, радиосвязное устройство 264 может содержать контакты, которые соединяются с контактными площадками 260 в зоне подключения, когда радиосвязное устройство 264 установлено надлежащим образом в предмете 250 экипировки. Радиосвязное устройство 264 может быть защелкнуто, закрыто или закреплено с использованием материала типа "липучка" или материала, продаваемого под товарным знаком Velcro® компанией Velcro Industries, г.Манчестер, штат Нью-Гемпшир, США, с использованием магнитных устройств или других подходящих крепежных устройств.
На фигурах 7А и 7В радиосвязное устройство 264 изображено без крышки, которая снята для показа расположения компонентов на первой поверхности (см. фигуру 7А) и компонентов на соответствующей второй поверхности (см. фигуру 7В) печатной платы радиосвязного устройства 264. Радиосвязное устройство 264 содержит несущую конструкцию 270, например двухстороннюю печатную плату, которая содержит первую сторону, схему 272 регулятора, предназначенного для регулирования мощности, используемой для работы радиосвязного устройства 264, оптических сигнализаторов 274, таких как светодиоды, которые обеспечивают индикацию работы радиосвязного устройства 264, компоненты 276 ввода информации, такие как переключатели, процессор 278, а также кварцевый резонатор 280 или другую подходящую схему, задающую тактовую частоту процессора. На второй стороне несущей конструкции располагается батарея 282, радиочастотные схемы 284, такие как передатчик, приемник, приемопередатчик и т.п., а также контакты 286, которые соединяются с контактными площадками в зоне 254 подключения, когда радиосвязное устройство 264 установлено в соответствующем предмете 250 экипировки оператора.
Оптические сигнализаторы 274 могут использоваться для обеспечения информации оператору о состоянии системы дистанционного управления. Например, первый индикатор может использоваться в качестве индикатора неисправности. В частности, светодиод может высвечивать символ "X" в кружке (лучше всего видно на фигуре 6) для указания неисправности, например, не подсоединена кнопка 258 команды движения, одна из кнопок закорочена или неисправна, пропала радиосвязь, отсутствует идентификационный номер приемника, назначенного для работы с передатчиком (будет описано ниже) и т.п. Другой сигнализатор 274 может использоваться для индикации разряженной батареи (высвечивается значок батареи), как это лучше всего видно на фигуре 6. Возможны и другие применения сигнализаторов, а также может использоваться более двух сигнализаторов или всего один. Устройство 70 дистанционного управления может также содержать дополнительные сигнальные элементы, такие оптические индикаторы, звуковые или другие устройства, которые обеспечивают визуальную или акустическую информацию о состоянии устройства дистанционного управления и/или связанного с ним электропогрузчика 10.
Компоненты 276 ввода информации могут состоять, например, из двух кнопок. Первая кнопка может обеспечивать включение звукового сигнала. Если нажать на эту кнопку, то в приемник 102 электропогрузчика 10 передается соответствующее сообщение для включения его звукового сигнала. Вторая кнопка может обеспечивать экстренное отключение. Если нажать на эту кнопку, то в приемник 102 электропогрузчика 10 передается команда экстренного отключения. После получения команды экстренного отключения электропогрузчик 10 может остановиться и отключить питание, после чего оператору будет необходимо инициировать процедуру перезапуска электропогрузчика, описанную ниже.
Радиочастотная схема 284 передатчика может передавать информацию в аналоговой или цифровой форме, используя соответствующие фирменные или стандартизованные форматы беспроводной передачи информации. Например, передача может осуществляться с использованием известных технологий, таких как стандарт 802.11, 802.16, Bluetooth, служба передачи коротких сообщений (SMS), кодирование со сдвигом амплитуды (ASK), амплитудная манипуляция (ООК), беспроводная локальная сеть (WLAN), многостанционный доступ с кодовым разделением каналов (CDMA), амплитудная модуляция (AM), частотная модуляция (FM), универсальная система мобильной связи (UMTS), технология сотовой связи, такая как, например, глобальная система связи с подвижными объектами (GSM) и др. На практике способ передачи сообщений передатчиком должен соответствовать формату, распознаваемому соответствующим приемником электропогрузчика 10. Кроме того, радиочастотные схемы 284 устройства 70 дистанционного управления могут также содержать собственный приемник для обеспечения двухсторонней связи с соответствующим электропогрузчиком 10.
Когда радиосвязное устройство надлежащим образом установлено на соответствующем предмете 250 экипировки, устройство 70 дистанционного управления обеспечивает оператору удобную платформу для дистанционного управления своим электропогрузчиком. Например, пользователь может нажать кнопку 258 ("движение"), которая соединяется с процессором 278 радиосвязного устройства 264 через электрическую цепь 256 и соответствующие контакты 260 и контактные площадки 286. После нажатия кнопки "движение" процессор 278 формирует и передает запрос на движение, после чего электропогрузчик перемещается, если запрос на движение принят на электропогрузчике и определен как действительная команда.
Если запрос на движение правильно принимается приемником 102 и определяется, что он является действительным запросом на движение, электропогрузчиком 10 можно управлять дистанционно по радио для его перемещения в течение заданного интервала времени и/или на заданное расстояние, и затем осуществляется управляемое торможение или движение по инерции, как описывается более подробно в настоящем описании. В альтернативном варианте кнопка 258 может задавать движение электропогрузчика 10 до тех пор, пока она нажата (или до тех пор, пока не произойдет определенное событие, такое как прохождение электропогрузчиком 10 максимального расстояния, истечение заданного времени движения, обнаружение условий работы или условий окружающей среды, при которых электропогрузчик должен быть остановлен и др.). Зона 252 органов управления и/или радиосвязное устройство 264 может также дополнительно содержать органы управления направлением движения для обеспечения команд по управлению углом поворота электропогрузчика, как это описано ниже более подробно.
Также устройство дистанционного управления может быть снабжено кнопкой "стоп", например, в зоне 252 органов управления или на радиосвязном устройстве 264 для остановки электропогрузчика, что может быть полезным в том случае, когда реализована функция движения по инерции. Если команда "стоп" правильно принята приемником 102, то осуществляется управление электропогрузчиком 10 для осуществления его управляемой остановки. В альтернативном варианте дополнительная кнопка может соответствовать команде на движение по инерции, которая, будучи правильно принятой приемником 102, обеспечивает движение электропогрузчика по инерции до полной остановки.
После нажатия какой-либо кнопки на устройстве 70 дистанционного управления процессор 278 формирует соответствующее сообщение и передает его через передатчик 284 в приемник 102. В этой связи процессор 278 может передать вместе с командой, последовательность, управляющую или другую идентификационную информацию, необходимую для приемника 102 для определения того, что конкретное устройство 70 дистанционного контроля является действительным радиосвязным устройством, для идентификации операторов, для регистрации данных и для других целей.
Хотя устройство 70 дистанционного управления показано в форме перчатки, которую оператор надевает на руку, однако возможны и другие, альтернативные варианты формы устройства. Например, передатчик, блок питания и/или органы управления, такие как кнопка 258, могут быть выполнены вместе или отдельно друг от друга, и их можно носить на любой части тела оператора, исходя из соображений удобства, комфорта или необходимости, в зависимости от конкретного применения. Например, как показано, предмет 250 экипировки носит соответствующий оператор. В этом случае каждый оператор может иметь свою собственную перчатку с кнопкой 258, электрической цепью 256 и встроенными антеннами 262. Когда оператор начинает свою рабочую смену, радиосвязное устройство 264 может быть извлечено из соответствующего зарядного устройства или получено в зоне хранения и установлено в соответствующую зону 254 подключения.
За счет разделения радиосвязного устройства 264, предмета 250 экипировки и соответствующей кнопки 258 один передатчик может использоваться в перчатках разных операторов. В этом случае операторы, работающие в разных сменах, могут хранить свои собственные перчатки 250 с органами управления, такими как кнопка 258, и оператор может просто подключать радиосвязное устройство к своей перчатке в начале своей смены. При этом обеспечивается использование технологий идентификации, в частности метки RFID могут быть введены в предмет 250 экипировки, и их информация может быть затем передана на электропогрузчик 10. В таком случае оператор может быть зарегистрирован на электропогрузчике 10, а также может быть записана производительность работы и другая информация рабочего журнала.
Как можно видеть на фигурах 8А и 8В, оператору удобно нажимать кнопку 258 устройства дистанционного управления соответствующим большим пальцем (показано стрелками). Такое действие по нажатию кнопки 258 оператором является осознанным и в то же время легко выполнимым. Также могут использоваться различные последовательности нажатий на кнопку 258. Например, может использоваться двойное быстрое нажатие кнопки ("двойной щелчок"). Устройство 70 дистанционного управления можно носить таким образом, чтобы оператор электропогрузчика не испытывал неудобств или помех при его использовании, когда у него заняты обе руки при отборе товаров или их переноске. Кроме того, в таком варианте отсутствует неудобство, связанное с необходимостью движения руками или ногами для приведения в действие органов управления для задания движения или остановки электропогрузчика 10, особенно в тех случаях, когда руки оператора заняты отбором товаров. Таким образом, оператор может задать движение или остановку электропогрузчика 10, используя одно простое движение, даже в том случае, когда у него заняты обе руки, например, он несет коробки с отобранными товарами.
В соответствии с одним из вариантов осуществления настоящего изобретения зона 288, окружающая кнопку 258, может содержать приподнятый/контурный поясок. Для того чтобы нажать и/или выбрать кнопку 258, оператор должен прижать большой палец в направлении, показанном стрелкой, к пояску и нажать кнопку 258. В другом варианте кнопка 258 может быть устроена таким образом, что для ее срабатывания и передачи сигнала требуется движение пальца оператора в нескольких направлениях. Например, кнопка 258 может быть устроена таким образом, что ее надо сначала нажать, а затем сдвинуть в боковом направлении, которое в общем случае перпендикулярно направлению первоначального нажатия.
Предмет 250 экипировки может быть изготовлен из разных материалов, таких как растягивающиеся ткани, пластмассы, синтетические материалы или другие материалы в различных сочетаниях. Кроме того, различные компоненты устройства 70 дистанционного управления могут быть выполнены в разных формах, позволяющих носить их в качестве нарукавной повязки, пояса или носить на рубашке с использованием пружинного зажима или другого аналогичного крепежного устройства. Соединительное устройство, соединяющее передатчик с зоной органов управления, также может быть выполнено в форме сравнительно тонкой проволоки, которая может быть намотана на катушке с возможностью подмотки после вытягивания.
Устройство 70 дистанционного управления может быть запрограммировано таким образом, чтобы с помощью кнопки 258 можно было вводить несколько команд управления. Например, устройство 70 дистанционного управления может быть запрограммировано для передачи команды "стоп" при однократном нажатии кнопки 258. Если кнопку 258 быстро нажать два раза ("двойной щелчок") или нажать два раза в течение заданного интервала времени, то будет передана команда "движение". Кнопка 258 может быть размещена под подпружиненным откидным элементом, который может быть откинут для доступа к кнопке 258.
В альтернативном варианте могут обеспечиваться резервные органы управления движением на радиосвязном устройстве 264, которые можно нажимать независимо, или же требуется их нажатие совместно с нажатием других органов управления для обеспечения движения электропогрузчика 10. При этом радиосвязное устройство 264 может быть устроено таким образом, чтобы оператор мог носить его на руке, например, выше запястья или же в легкодоступном месте, например на поясе, на рубашке или на брюках, и в этом случае радиосвязное устройство 264 может быть соединено с кнопкой 258 с помощью соответствующих проводов. Кроме того, может использоваться такая технология, как Bluetooth, обеспечивающая радиосвязь на небольших расстояниях, для обеспечения связи радиосвязного устройства 264 с соответствующей кнопкой 258, и в этом случае оператор может носить его на любой части своего тела.
Оператор может также носить устройство 70 дистанционного управления как брелок на шее, используя прикрепленный к нему шнурок. В таком варианте использования кнопка 258 может представлять собой два переключателя, выполненных в форме шероховатых обрезиненных поверхностей на противоположных сторонах устройства 70 дистанционного управления. В этом случае для включения органа управления движением оператор должен сжать устройство 70. При этом может быть необходимо срабатывание обоих переключателей. В таком варианте передатчик, блок питания и органы управления могут быть интегрированы в одном корпусе, в результате чего минимизируются неудобства, создаваемые оператору устройством 70 дистанционного управления, за счет исключения проводов и других элементов, которые могут болтаться или быть неудобными для оператора. Для передачи команды остановки или движения по инерции оператор может, например, взять брелок и потянуть вниз устройство 70, Направленное вниз усилие приводит к передаче передатчиком команды на остановку или на движение по инерции, в зависимости от варианта программирования устройства 70. В этом случае оператор носит устройство 70 дистанционного управления на шнурке, накинутом на его шею.
В соответствии с другим вариантом осуществления настоящего изобретения оператор может носить устройство 70 дистанционного управления на рубашке, брюках, жилете, комбинезоне или другой части одежды с использованием подходящего зажима. В таком варианте также используется компактное устройство, в котором передатчик и зона органов управления размещены в общем корпусе. Кроме того, зажим позволяет оператору прикреплять устройство 70 дистанционного управления в любом удобном месте на одежде или в любом другом месте возле оператора. Зажим также может быть соединен со шнурком, обеспечивающим ношение устройства 70 на шее оператора. В целом округленная и гладкая конфигурация устройства 70 дистанционного управления позволяет выполнить его в форме низкопрофильной конструкции, которая при ее ношении может хорошо прилегать к телу оператора.
В соответствии еще с одним вариантом осуществления настоящего изобретения устройство 70 дистанционного управления представлять собой передатчик, управляемый голосом. Такое устройство 70 может быть прикреплено к плечевому ремню, к поясу или к другому подходящему предмету одежды. В этом случае устройство 70 дистанционного управления содержит микрофон. Микрофон может поворачиваться или регулироваться иным образом для обеспечения удобства пользования для оператора. Хотя в этом случае обеспечивается включение голосом, однако может также обеспечиваться резервная кнопка остановки или движения по инерции. При таком варианте обеспечивается гибкость в размещении устройства 70 дистанционного управления на операторе. Кроме того, устройство дистанционного управления может быть выполнено в варианте, обеспечивающем режим работы без использования рук ("hands free"). Голосовые команды предпочтительно должны составлять набор простых команд.
При использовании в устройстве 70 дистанционного управления системы управления голосом могут использоваться такие команды оператора, как "движение", "вперед", "движение по инерции", "стоп" и др. для обеспечения передвижения электропогрузчика 10 на заданное расстояние при выдерживании направления, заданного контроллером 112 рулевого управления (см. фигуру 2), например, параллельно местам 122 хранения в проходе 120. Слова команд "движение", "вперед", "движение по инерции", "стоп" и др. могут использоваться для обмена сообщениями с контроллером 106 тягового двигателя, в то время как контроллер 112 рулевого управления автоматически корректируется для выдерживания прямолинейного движения или другого нужного направления. Устройство 70 дистанционного управления может быть устроено таким образом, чтобы оператор мог осуществлять минимальные корректировки направления движения электропогрузчика 10, например, вводом таких голосовых команд, как "влево" или "вправо". В таком варианте преобразование голосовых команд в команды управления для электропогрузчика 10 может осуществляться либо в процессоре устройства 70 дистанционного управления, либо в контроллере 103 электропогрузчика 10.
Еще в одном альтернативном варианте конфигурации устройства дистанционного управления используется модификация кнопки 258, нажимаемой большим пальцем. Вместо одной кнопки используются две кнопки. Каждая кнопка содержит первый переключающий элемент, и второй переключающий элемент является общим для обеих кнопок. В частности, предмет экипировки содержит первое ленточное кольцо для пальца, например для указательного пальца руки оператора, которое поддерживает первый переключающий элемент первой кнопки и первый переключающий элемент второй кнопки, выполненные, например, в форме углублений. Когда предмет экипировки надет, первые переключающие элементы направлены к стороне указательного пальца оператора. В целом вдоль основания углубления первого переключающего элемента обеспечивается контакт первой кнопки. Аналогично, в целом вдоль основания углубления второго переключающего элемента обеспечивается контакт второй кнопки.
Соответственно, предмет экипировки содержит ленточное кольцо, на котором располагается общий переключающий элемент для обеих кнопок и которое предназначено для надевания на большой палец руки оператора. Второй переключающий элемент содержит общий контакт, расположенный у конца выступа, форма которого примерно соответствует форме углублений первых переключающих элементов первой и второй кнопок. Для срабатывания первой кнопки общий контакт на большом пальце руки оператора плотно прижимается к контакту первой кнопки, например, путем направления выступа второго переключающего элемента в углубление первого переключающего элемента. При возникновении электрического соединения между контактом первой кнопки и общим контактом срабатывает соответствующий орган управления. Аналогично, для срабатывания второй кнопки общий контакт на большом пальце руки оператора плотно прижимается к контакту второй кнопки, например, путем направления выступа второго переключающего элемента в углубление первого переключающего элемента. При возникновении электрического соединения между контактом второй кнопки и общим контактом срабатывает соответствующий орган управления.
Любой из описанных вариантов устройства 70 дистанционного управления может быть снабжен органами управления коррекцией направления движения. Например, устройство 70 дистанционного управления может содержать дополнительные органы управления в зоне органов управления, такие как кнопка поворота налево и кнопка поворота направо, в дополнение к кнопке управления движением и к дополнительной кнопке (необязательный элемент) остановки или движения по инерции. Величина дистанционно управляемого поворота будет зависеть от ряда факторов, таких как условия среды использования электропогрузчика, типичная величина необходимого поворота и т.п. Однако в одном из вариантов осуществления изобретения могут использоваться малые приращения угла поворота, например, порядка 1 градуса или менее для каждого срабатывания органов управления поворотом направо и налево.
Кроме того, система дистанционного управления может быть интегрирована с управлением углом поворота электропогрузчика 10. Орган управления углом поворота обычно представляет собой потенциометр, кодовый датчик положения или другое подходящее устройство ввода информации, которое может быть установлено в любом удобном месте электропогрузчика 10. При использовании вместе с дополнительными органами рулевого управления орган управления направлением движения задает нужное направление движения электропогрузчика 10. Например, оператор при работе на складе может выровнять электропогрузчик 10 в проходе параллельно рядам стоек. Используя обратную связь по углу поворота от контроллера 112 рулевого управления (см. фигуру 2), можно выдерживать направление движения электропогрузчика 10 параллельно стойкам, по мере того как электропогрузчик 10 движется в проходе. Орган управления углом поворота предотвращает смещение электропогрузчика 10 и удерживает его на нужном курсе. В таком варианте при выполнении запроса на движение, поступившего от устройства 70 дистанционного управления, электропогрузчик 10 движется практически прямолинейно в направлении, заданном контроллером рулевого управления.
В системе, в которой реализуется вышеописанное управление движением, могут использоваться дополнительные улучшенные возможности для выполнения специальных требований. Например, в передатчиках может быть реализована команда общего выключения, которая позволяет выключить все электропогрузчики 10, находящиеся в режиме дистанционного управления в зоне действия передатчика. Таким образом, все приемники могут быть запрограммированы или иным образом настроены на распознавание команды общего выключения, например, с использованием последовательности глобальных команд. Кроме того, команда общего выключения может передаваться с указанием идентификатора оператора, так что потом может быть установлен оператор, передавший сигнал общего выключения.
В каждом из рассмотренных вариантов антенна передатчика может быть размещена в корпусе передатчика, включена в предмет экипировки, например, путем интегрирования антенны в "липучку", ремни, ленты или другие компоненты, связанные с передатчиком и надетые на оператора, или же размещена вместе с проводами, проходящими между корпусом передатчика и органами управления и т.п.
Излучение передатчика может быть направленным. Излучение в этом случае должно направляться на приемник 102 или антенну 66 (цель), которые находятся на электропогрузчике 10. Таким образом, оператор должен направить передатчик устройства 70 дистанционного управления на цель для обеспечения действия системы, то есть, чтобы команды принимались на электропогрузчике 10. В альтернативных вариантах некоторые команды могут быть ненаправленными, а другие команды будут передаваться направленно. Например, нет необходимости в направленной передаче команды общего выключения. С другой стороны, команда на движение большей частью передается на один электропогрузчик (направленная передача). Направленная передача может осуществляться с использованием, например, инфракрасного излучения.
Вышеописанные различные варианты осуществления устройства дистанционного управления являются всего лишь примерами и никоим образом не ограничивают возможные конфигурации такого устройства. Различные описанные признаки могут быть включены в любую возможную конфигурацию. Кроме того, в дополнение вышеупомянутых признаков или вместо них могут быть обеспечены дополнительные признаки.
На фигуре 9 иллюстрируется способ 300 синхронизации устройства дистанционного управления и электропогрузчика. На стадии 302 оператор электропогрузчика получает радиосвязное устройство в технической зоне. Техническая зона может включать место общего хранения для неиспользуемых радиосвязных устройств, станцию зарядки аккумуляторов и т.п. После этого на стадии 304 оператор подключает, загружает или иным образом соединяет полученное радиосвязное устройство с соответствующим предметом экипировки устройства дистанционного управления, например, защелкиванием радиосвязного устройства в зоне подключения перчатки, как это было описано выше. Оператор надевает предмет экипировки, если до сих пор он этого не сделал.
После этого на стадии 306 оператор инициирует последовательность действий по включению питания для обеспечения готовности электропогрузчика к работе, то есть оператор запускает электропогрузчик. При запуске электропогрузчика у оператора может быть запрошен код идентификации для входа в систему электропогрузчика. Идентификация может быть выполнена, например, путем ввода персонального идентификационного номера (PIN) на панели управления электропогрузчика с использованием клавиатуры для обеспечения ввода идентификационного номера в систему электропогрузчика, или же PIN оператора может быть записан в устройстве памяти, таком как чип RFID, который интегрирован в предмет экипировки с устройством дистанционного управления, носимый оператором. В таком варианте радиосвязное устройство, прикрепленное к предмету экипировки, может считывать номер PIN через контактные площадки и передавать его в электропогрузчик, или же устройство на электропогрузчике, например, считыватель RFID может считывать идентификационный номер оператора, например, при приближении предмета экипировки ближе к электропогрузчику.
Затем на стадии 308 оператор вводит на электропогрузчике режим установления связки передатчик-приемник. Возможно, что в одинаковой близости находится несколько электропогрузчиков и/или передатчиков, использующих режим дистанционного управления в соответствии с различными вариантами осуществления настоящего изобретения. В таком случае на индикаторе электропогрузчика могут отображаться или иным образом индицируются идентификационные коды всех опознанных передатчиков. На стадии 310 оператор просматривает отображаемый список идентификационных кодов и выбирает тот, что соответствует радиосвязному устройству, подключенному к предмету экипировки оператора. Например, радиосвязное устройство может содержать наклейку, ярлычок или другой индикатор, на котором имеется идентификационный код передатчика, например идентификационный код может быть нанесен на лицевую сторону радиосвязного устройства.
После этого система на стадии 312 осуществляет синхронизацию передатчика устройства дистанционного управления, носимого оператором, с приемником соответствующего электропогрузчика. Например, контроллер 103 электропогрузчика может запросить у пользователя ввести известную последовательность нажатий кнопок на устройстве 70 дистанционного управления, например, одновременно нажать кнопки звукового сигнала и экстренного выключения. В результате система сможет выполнить необходимую проверку, например, определить, что кнопки, соединенные с устройством дистанционного управления, работоспособны. После выполнения синхронизации система может подтвердить это на визуальном индикаторе, например, путем отображения соответствующего сообщения на электропогрузчике, свидетельствующего о завершении синхронизации.
В зависимости от информации, необходимой для конкретного применения различных вариантов осуществления настоящего изобретения, могут использоваться три вида идентификации по уникальным кодам: идентификация оператора, идентификация радиосвязного устройства и идентификация электропогрузчика. Эта информация может быть полезна, например, для проверки действительности команд, получаемых приемником электропогрузчика, для записи данных с целью последующего анализа, учета производительности, характеристик работы электропогрузчика и т.п.
На фигуре 10 иллюстрируется способ 320 работы оператора электропогрузчика, начинающего свою рабочую смену с использованием устройства дистанционного управления в соответствии с различными вариантами осуществления настоящего изобретения. На стадии 322 оператор электропогрузчика получает радиосвязное устройство в соответствующей зоне хранения. Как и в предыдущем примере, радиосвязные устройства могут храниться, например, на станции зарядки аккумуляторов. На стадии 324 оператор электропогрузчика устанавливает радиосвязное устройство в предмет экипировки. Затем на стадии 326 радиосвязное устройство включают для передачи тонального сигнала режима установления связки передатчик-приемник. Например, тональный сигнал установления связки передатчик-приемник может содержать циклически передаваемое сообщение, в котором содержится информация идентификации передатчика. В этой связи передаваемый идентификационный код передатчика может соответствовать идентификационному коду передатчика, записанному на радиосвязном устройстве или иным образом известному оператору электропогрузчика.
На стадии 328 оператор осуществляет процедуру запуска электропогрузчика, которая может содержать вышеописанный вход в систему электропогрузчика. Затем на стадии 330 оператор может задать режим установления связки передатчик-приемник для синхронизации приемника электропогрузчика с определенным передатчиком, полученным оператором электропогрузчика. В процессе осуществления режима установления связки передатчик-приемник на стадии 332 приемник электропогрузчика принимает все тональные сигналы и выводит их, например, в форме идентификационных кодов передатчиков на средство отображения информации. В одном из иллюстративных примеров идентификационные коды обнаруженных передатчиков могут отображаться в порядке уровней сигналов или другого подходящего параметра. Оператор электропогрузчика на стадии 334 выбирает идентификационный код передатчика, который соответствует коду передатчика, связанного с полученным радиосвязным устройством, которое установлено в его предмете экипировки с устройством дистанционного управления. Идентификационный код передатчика, выбранный оператором, запоминается в электропогрузчике, например в памяти контроллера электропогрузчика.
Контроллер электропогрузчика на стадии 336 может передать в радиосвязное устройство, подключенное к устройству дистанционного управления, установленному на предмете экипировки оператора, сообщение, которое содержит уникальный идентификационный код приемника электропогрузчика и/или другую информацию, которая может быть сохранена в памяти радиосвязного устройства, носимого оператором. После этого передатчик и приемник синхронизируются на стадии 338, например, как это было описано выше. Например, оператору электропогрузчика может быть предложено нажать в определенной последовательности органы управления на устройстве дистанционного управления. После обнаружения запрошенного включения органов управления и/или последовательности включения, радиосвязное устройство может передать сообщение в приемник электропогрузчика, которое содержит идентификационный код передатчика, идентификационный код приемника и код, соответствующий запрошенному включению органов управления и/или последовательности включения, которые включались для обеспечения синхронизации приемника на электропогрузчике с устройством дистанционного управления, носимым оператором.
В этой связи контроллер на электропогрузчике может связывать идентификационный код передатчика с идентификационным кодом оператора, который передается в контроллер оператором как часть процедуры входа в систему, необходимой для запуска электропогрузчика. Контроллер может также привязать идентификационный код, связанный с электропогрузчиком/приемником. В этом случае будет получена связка идентификационного кода электропогрузчика/приемника, идентификационного кода устройства дистанционного управления и идентификационного кода оператора. Контроллер электропогрузчика может использовать такую связку для распознавания принятых команд. Кроме того, в устройстве дистанционного управления также сохраняется информация об электропогрузчике, с которым была выполнена синхронизация, и/или другая дополнительная информация, например идентификационный код оператора и т.п., которая может использоваться при формировании и передаче сообщений.
На фигуре 11 приведена блок-схема действий оператора, когда после выполнения рабочих операций ему необходимо временно оставить электропогрузчик, например сделать небольшой перерыв в работе. В способе 350 осуществляется выключение, перезапуск и повторная синхронизация приемника электропогрузчика и передатчика радиосвязного устройства, носимого оператором электропогрузчика. На стадии 352 оператор выключает электропогрузчик, чтобы сделать перерыв на ланч и т.п. Через некоторое время на стадии 354 оператор снова включает электропогрузчик. В течение перерыва передатчик устройства дистанционного управления, носимый оператором, может продолжать передавать тональный сигнал синхронизации, содержащий идентификационный код передатчика и идентификационный код соответствующего электропогрузчика/приемника. Тональный сигнал синхронизации, передаваемый передатчиком радиосвязного устройства, носимого оператором, обнаруживается на стадии 356, поскольку связка идентификационного кода передатчика и идентификационного кода приемника/электропогрузчика сохраняется в памяти электропогрузчика.
Затем на стадии 358 контроллер электропогрузчика может запросить подтверждение у оператора, например, путем ввода PIN-кода или выполнением какого-либо другого идентифицирующего действия для подтверждения того, что этот оператор является тем же самым оператором, который управлял электропогрузчиком перед перерывом. На стадии 360 правильность связки передатчик-приемник подтверждается и отображается, если идентификационный код оператора, введенный при выполнении процедуры подтверждения, совпадает с идентификационным кодом оператора, который был сохранен в памяти электропогрузчика перед перерывом.
Например, контроллер электропогрузчика может сохранять вышеупомянутую связку идентификационных кодов: идентификационный код электропогрузчика/приемника, идентификационный код устройства дистанционного управления и идентификационный код оператора, даже если питание электропогрузчика выключено. В этом случае, если рядом проходит другой оператор, то он не сможет осуществлять дистанционное управление электропогрузчика, даже если в распоряжении этого другого оператора имеется передатчик предыдущего оператора, поскольку у этого другого оператора будет другой идентификационный код. Аналогично, если этот другой оператор запускает электропогрузчик и вводит свой идентификационный код как часть процедуры запуска электропогрузчика, то запросы на движение, передаваемые новым оператором, не будут подтверждены контроллером на электропогрузчике, поскольку отсутствует связка трех идентификационных кодов, то есть передатчик нового оператора не будет синхронизирован с приемником электропогрузчика.
В этом случае, чтобы новый оператор мог управлять электропогрузчиком, используя беспроводную систему дистанционного управления, он должен зарегистрироваться в системе электропогрузчика, указав свой идентификационный код оператора, и задать процедуру синхронизации для указанной пары устройств:
передатчика нового оператора и приемника электропогрузчика, с использованием вышеописанных способов.
На фигуре 12 приведена блок-схема способа 370 временного выключения питания электропогрузчика, его перезапуска и повторной синхронизации передатчика, носимого оператором, с приемником электропогрузчика. На стадии 372 оператор выключает электропогрузчик, чтобы сделать перерыв на ланч и т.п. Когда питание электропогрузчика отключено, на стадии 374 запускается таймер, связанный с контроллером электропогрузчика. В течение времени, когда электропогрузчик выключен, передатчик радиосвязного устройства, носимого оператором, продолжает передавать на стадии 376 тональный сигнал синхронизации. Например, поскольку передатчик было ранее синхронизирован с приемником электропогрузчика, тональный сигнал может содержать сообщение, содержащее идентификационный код передатчика и идентификационный код электропогрузчика/приемника. На стадии 378 снова включают питание электропогрузчика. После включения питания приемник электропогрузчика на стадии 380 начинает поиск соответствующего тонального сигнала, содержащего идентификационный код передатчика, который был ранее записан в памяти.
На стадии 382, если тональный сигнал синхронизации обнаруживается в течение заданного интервала времени, то сохраняется связка идентификационных кодов: передатчика оператора и приемника электропогрузчика. Если тональный сигнал найден после истечения заданного интервала времени, то оператору необходимо выполнить повторную синхронизацию, например, с использованием способа запуска, описанного в примерах, проиллюстрированных на фигурах 9 и 10. Если связка передатчик-приемник сохраняется, то на стадии 384 может быть найден идентификационный код передатчика, например, путем приема заранее определенного сообщения передатчика устройства дистанционного управления, такого как подтверждение повторной синхронизации. От оператора электропогрузчика на стадии 386 может потребоваться дать подтверждение, например, путем передачи на электропогрузчик идентификационного кода оператора, и на стадии 388 выполняется подтверждение связки указанных идентификационных кодов, например, путем отображения подтверждения оператору электропогрузчика.
В этом случае, если другой пользователь сделает попытку управления электропогрузчиком 10, то этот другой пользователь должен будет сбросить приемник электропогрузчика и произвести повторную синхронизацию для нового идентификационного кода передатчика устройства дистанционного управления, носимого этим другим оператором. Однако если этот новый оператор попытается выполнить указанные процедуры, электропогрузчик 10 может быть запрограммирован таким образом, что не будет выполнять команды дистанционного управления нового оператора, например, в том случае, когда электропогрузчик дополнительно привязан к идентификационному коду оператора. В этом случае новому оператору может потребоваться задать полную последовательность процедуры включения электропогрузчика, а также последовательность действий по заданию пары передатчик-приемник беспроводной системы дистанционного управления, и при этом идентификационный код нового оператора может быть зарегистрирован в электропогрузчике 10.
Если истекает заданный интервал времени, то связка передатчик-приемник может быть сброшена, например, путем стирания информации соответствия (связки) идентификационных кодов. Аналогично, когда радиосвязное устройство вынимают из соответствующей зоны подключения предмета экипировки и возвращают в зону хранения, например на станцию зарядки аккумуляторов, информация соответствия идентификационных кодов приемника и передатчика в памяти радиосвязного устройства может быть стерта. Например, когда радиосвязное устройство вынимают из предмета экипировки и устанавливают в зарядное устройство или иное стыковочное устройство, идентификационный код приемника и/или другая информация, которая была ранее записана в памяти радиосвязного устройства на основании информации, полученной из контроллера электропогрузчика, может быть стерта из памяти радиосвязного устройства. Кроме того, такая информация может быть загружена в соответствующую систему предприятия. Такая схема может быть полезна, например, в тех случаях, когда радиосвязными устройствами пользуются разные операторы.
В соответствии с другими вариантами осуществления настоящего изобретения конкретным операторам электропогрузчиков могут быть выделены индивидуальные радиосвязные устройства (в качестве альтернативы группе доступных всем радиосвязных устройств). Например, пусть оператор выключает питание электропогрузчика. После выключения питания начинает работать таймер. В это время информация о связке передатчик-приемник все еще сохраняется в памяти. После истечения заданного интервала времени эта информация стирается в памяти электропогрузчика. Допустим, что оператор электропогрузчика оставляет радиосвязное устройство, подключенное к предмету экипировки, на длительное время. После некоторого времени бездействия радиосвязное устройство может перейти в режим "сна", в котором запускается другой таймер, например для режима выключения. В течение этого времени информация, относящаяся к связке приемник-передатчик, остается в памяти, и радиосвязное устройство продолжает передавать свой тональный сигнал подтверждения. В режиме выключения питания информация, относящаяся к связке передатчик-приемник, сохраняется. Однако радиосвязное устройство прекращает передачу тонального сигнала подтверждения. После того как истечет третья временная задержка, идентификационный код приемника стирается в памяти радиосвязного устройства.
Терминология в настоящей заявке используется только для целей описания конкретных вариантов осуществления изобретения и никоим образом не ограничивает объема изобретения. В настоящем описании указание элементов и частей в единственном числе также предполагает и множественное число, если в тексте в явной форме не указано иное. Кроме того, термины "содержит" и/или "содержащий" при использовании в настоящем описании указывают на наличие перечисляемых признаков, стадий, операций, элементов и/или компонентов, однако не исключают наличие или добавление одного или нескольких других признаков, стадий, операций, элементов, компонентов и/или их групп.
Описание настоящего изобретения приведено лишь в иллюстративных целях и не является исчерпывающим или ограничивающим изобретение рассмотренными вариантами его осуществления. Среднему специалисту в данной области техники будут очевидны многие модификации и вариации, которые могут быть произведены без выхода за пределы объема и сущности изобретения. Варианты были выбраны и описаны, для того чтобы наилучшим образом объяснить принципы изобретения и его практическое применение и дать возможность среднему специалисту в данной области техники понять изобретение для различных вариантов его осуществления с различными модификациями, которые подходят для предполагаемых конкретных применений.
Таким образом, настоящее изобретение подробно описано на примерах предпочтительных вариантов его осуществления и ясно, что возможны различные модификации и вариации без выхода за пределы объема изобретения, который определяется его формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ И СПОСОБЫ ЕЕ ЭКСПЛУАТАЦИИ | 2007 |
|
RU2428744C2 |
| СИСТЕМА И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОРГУЗОЧНО- РАЗГРУЗОЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2578649C2 |
| МАНЕВРЫ ПРИ УПРАВЛЕНИИ ПОВОРОТОМ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2564928C1 |
| ОДНОВРЕМЕННОЕ ЗОНДИРОВАНИЕ НЕСКОЛЬКИХ ЗОН ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ УСТРОЙСТВ | 2009 |
|
RU2534008C2 |
| ОТСЛЕЖИВАНИЕ ОБЪЕКТОВ И МАНЕВРЫ РУЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2578831C9 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНОЙ | 2013 |
|
RU2580814C2 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА И СПОСОБ КОРРЕКТИРОВКИ НАПРАВЛЕНИЯ ЕЁ ДВИЖЕНИЯ | 2009 |
|
RU2550560C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2016 |
|
RU2698281C2 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА | 2009 |
|
RU2568046C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СОПРЯЖЕНИЯ КОНТРОЛЛЕРА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2670736C9 |
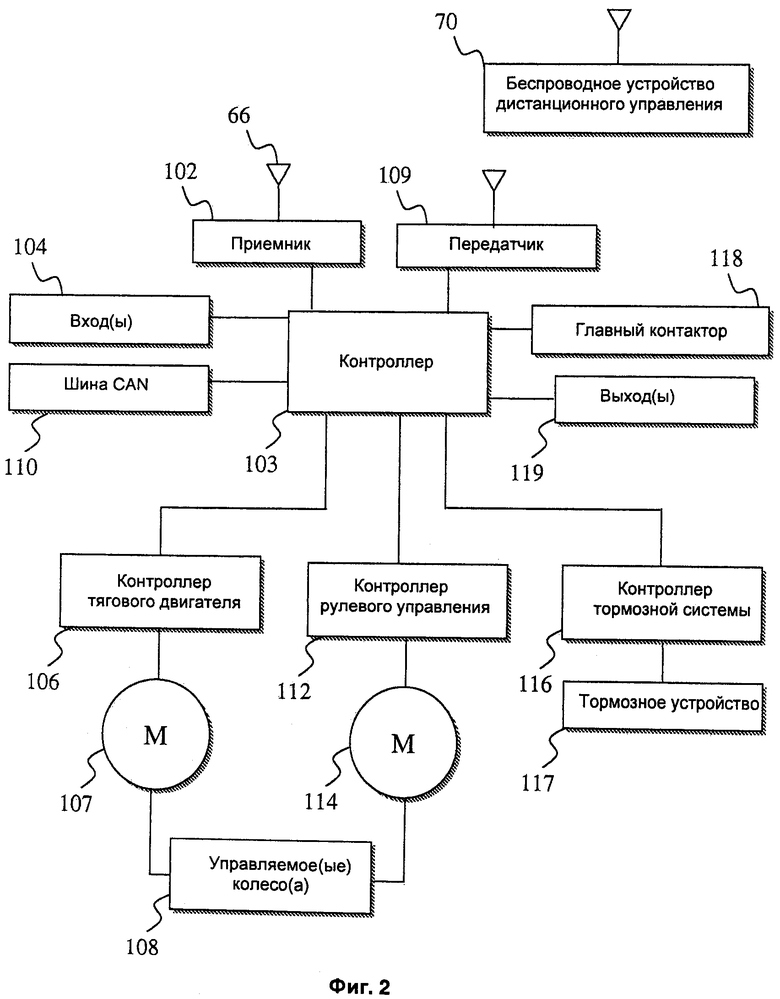




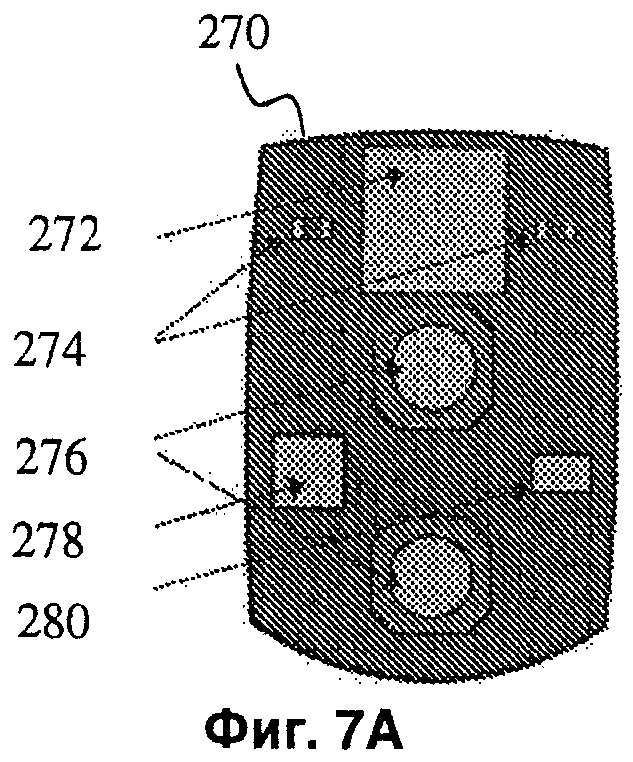
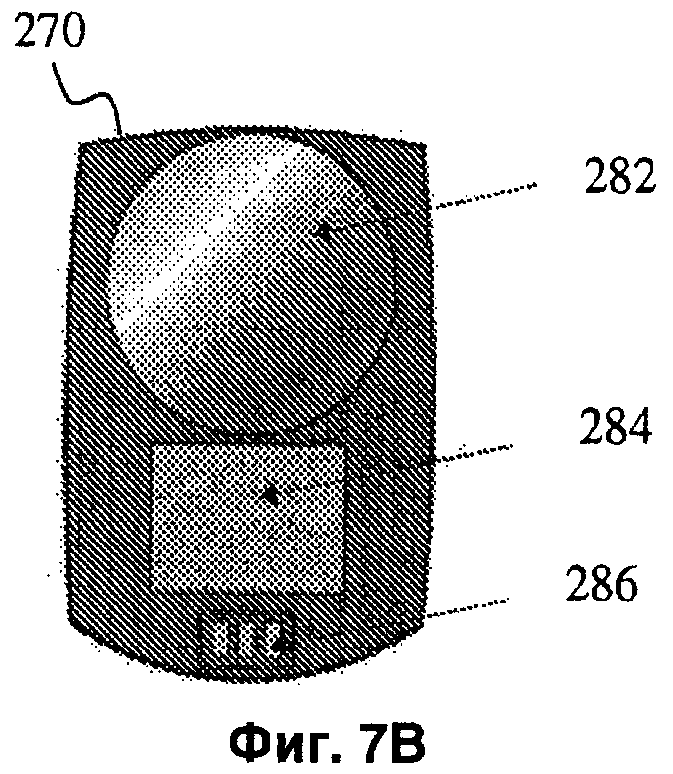


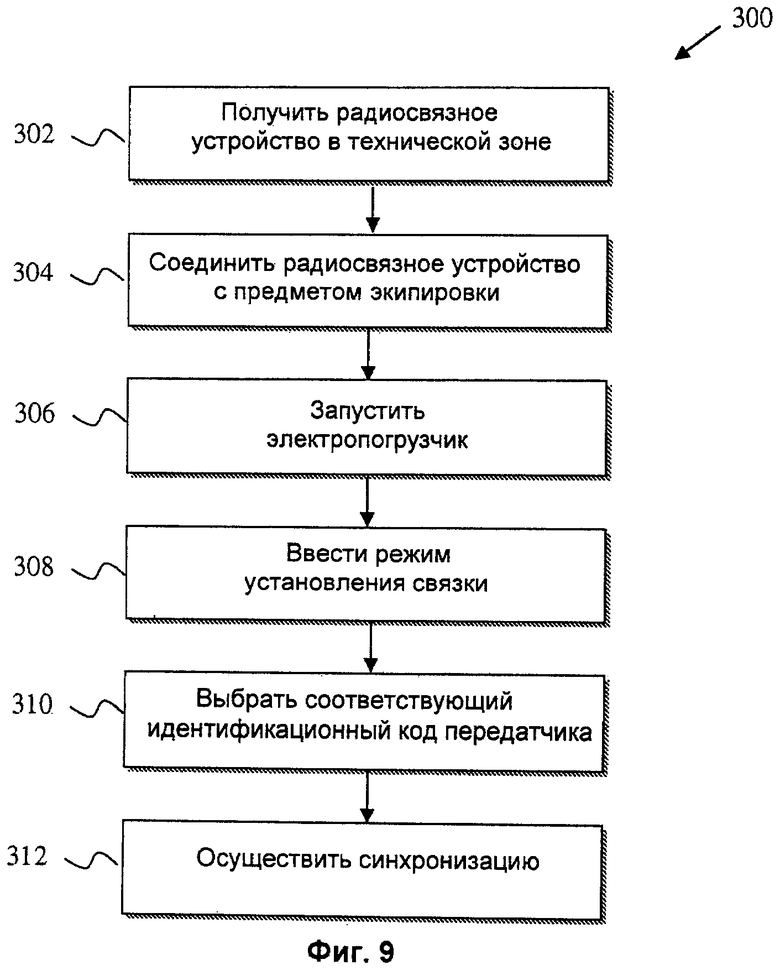
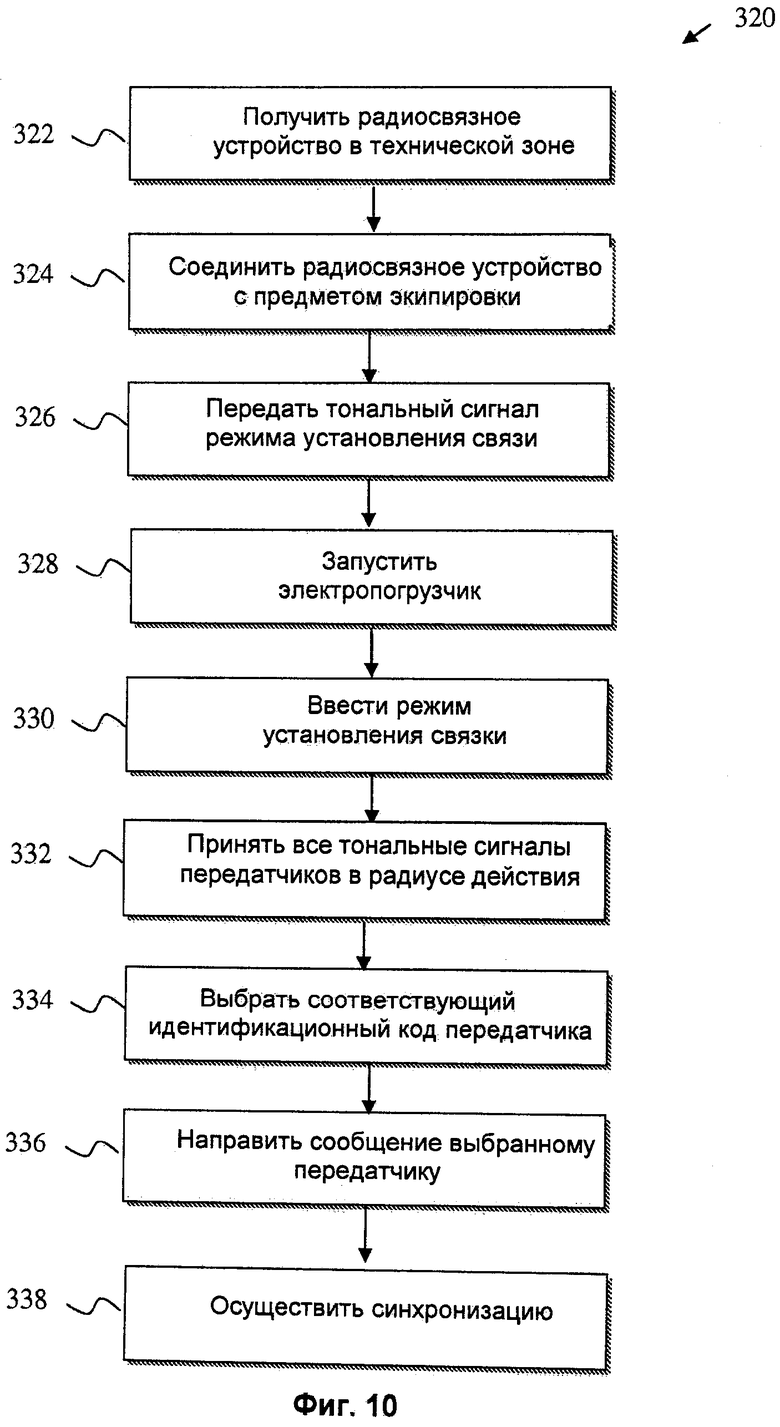
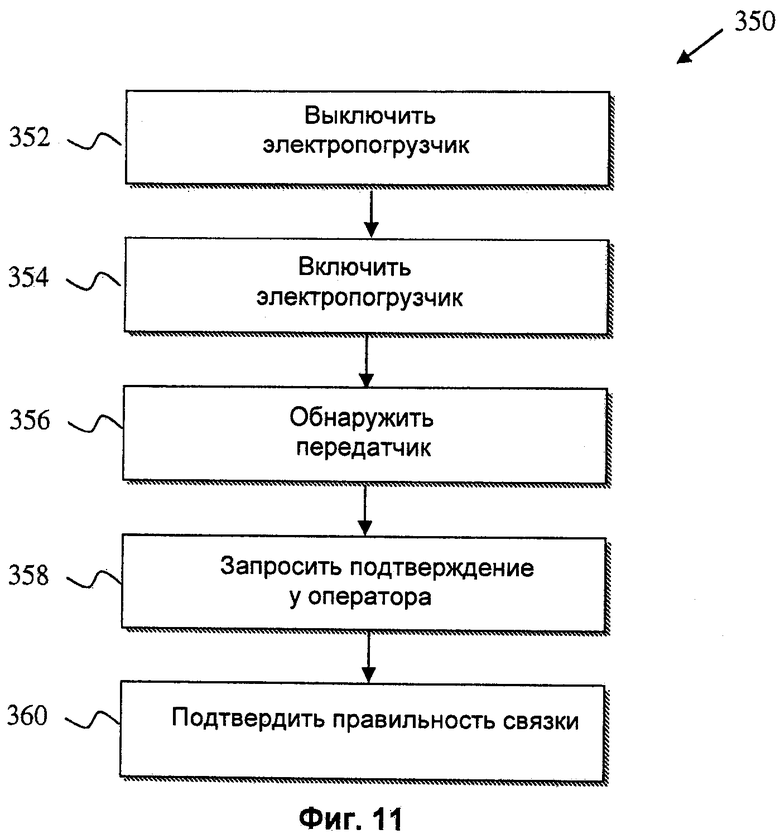
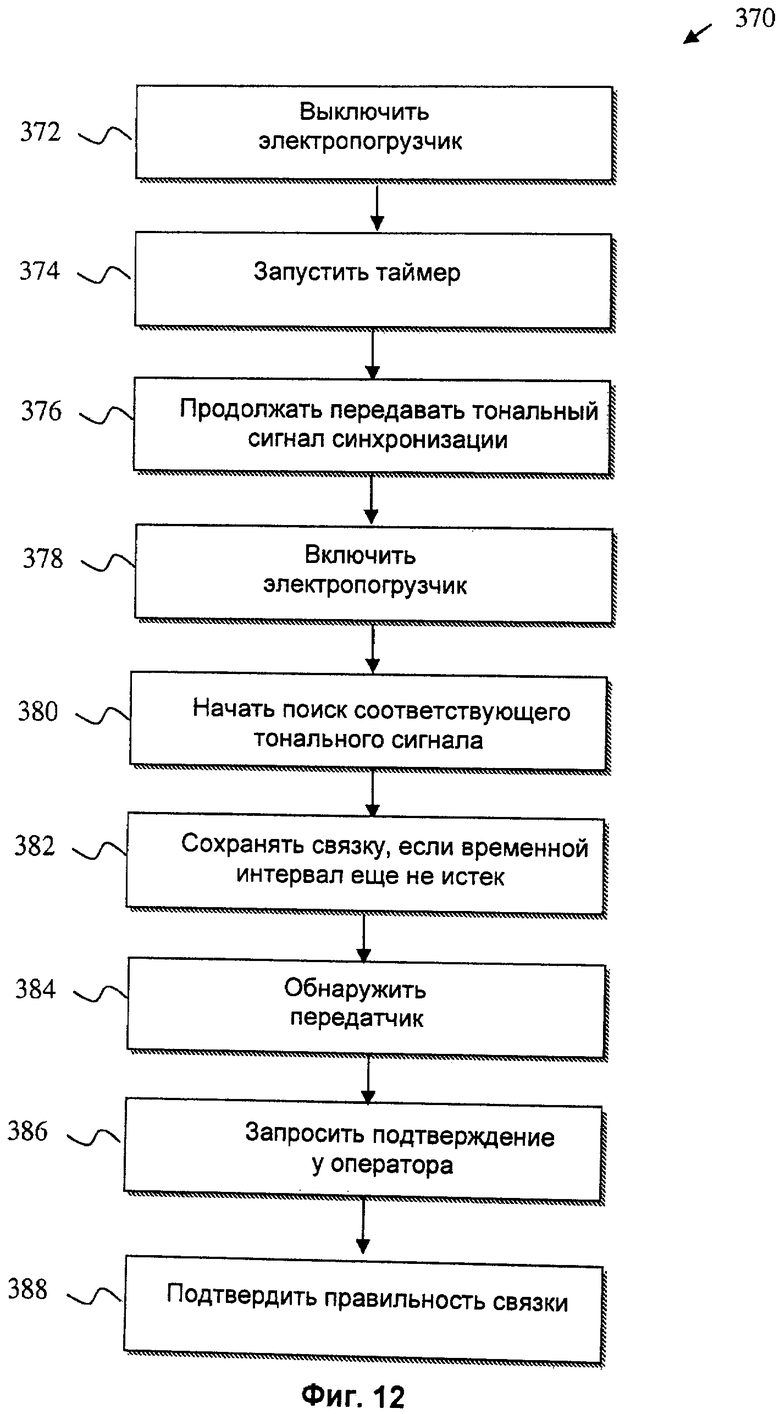
Изобретение относится к погрузочно-разгрузочным машинам и системам их управления. Система управления погрузочно-разгрузочной машиной содержит носимое устройство управления и соответствующий приемник на погрузочно-разгрузочной машине. Носимое устройство управления носит оператор, взаимодействующий с погрузочно-разгрузочной машиной, и оно содержит передатчик беспроводной связи и орган управления движением, соединенный с передатчиком с возможностью передачи информации. Включение органа управления движением вызывает передачу передатчиком беспроводной связи сигнала первого типа, содержащего запрос на движение погрузочно-разгрузочной машины в первом направлении. Приемник, расположенный на погрузочно-разгрузочной машине, предназначен для приема сигналов, передаваемых передатчиком беспроводной связи. Обеспечивается перемещение погрузочно-разгрузочной машины в соответствии с сигналами, принятыми приемником. 2 н. и 18 з.п. ф-лы, 12 ил.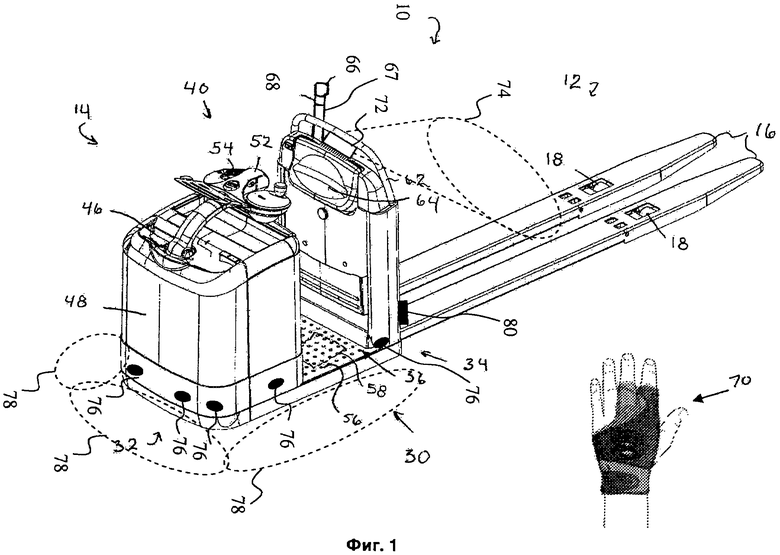
1. Система дистанционного управления транспортным средством для погрузочно-разгрузочных работ, содержащая силовой агрегат, содержащий по меньшей мере одно колесо и погрузочно-разгрузочный узел, содержащий пару вилочных захватов;
при этом система дистанционного управления включает в себя носимое оператором беспроводное устройство дистанционного управления, взаимодействующее с указанным транспортным средством для погрузочно-разгрузочных работ, причем устройство дистанционного управления содержит:
радиопередатчик;
устройство управления перемещением, соединенное по цепи связи с указанным радиопередатчиком, причем срабатывание указанного устройства управления перемещением побуждает указанный радиопередатчик передавать по радиосвязи запрос перемещения в виде сигнала первого типа, который побуждает указанное транспортное средство перемещаться в первом направлении;
приемник, связанный с указанным транспортным средством и предназначенный для приема на указанном транспортном средстве сообщений от указанного радиопередатчика; и
контроллер, связанный с указанным транспортным средством, который соединен по цепи связи с указанным приемником и с системой регулирования тягового усилия указанного транспортного средства, причем указанный контроллер получает указанный сигнал первого типа от указанного приемника; и
по меньшей мере один датчик, соединенный по цепи связи с указанным контроллером, при этом каждый из указанных датчиков сконфигурирован для обнаружения наличия объекта поблизости от указанного транспортного средства;
при этом указанный контроллер взаимодействует с системой управления тормозом, связанной с указанным транспортным средством, чтобы включать тормоз для остановки указанного транспортного средства, если указанное транспортное средство перемещается под дистанционным радиоуправлением, в ответ на прием указанного сигнала первого типа, и если по меньшей мере один датчик обнаруживает объект на пути перемещения указанного транспортного средства.
2. Система дистанционного управления по п.1, в которой носимое беспроводное устройство дистанционного управления дополнительно содержит перчатку, имеющую кнопку на пальце и схему, которая соединяет указанную кнопку с областью стыковки на указанной перчатке, причем:
включение указанной кнопки включает указанное устройство управления перемещением;
причем указанный радиопередатчик смонтирован на установленном с возможностью отсоединения устройстве связи, которое временно состыковано с указанной областью стыковки указанной перчатки, чтобы соединять указанный радиопередатчик с указанной кнопкой.
3. Система дистанционного управления по п.2, в которой предусмотрена антенна, объединенная с указанной перчаткой, выполненная с возможностью соединения с указанным радиопередатчиком, когда указанное установленное с возможностью отсоединения устройство связи временно состыковано с указанной областью стыковки указанной перчатки.
4. Система дистанционного управления по п.1, в которой указанный контроллер в ответ на получение указанного сигнала первого типа от указанного приемника производит оценку режима работы по меньшей мере одного транспортного средства, чтобы принять решение о том, следует ли реализовывать указанный запрос на перемещение на основании оценки режима работы по меньшей мере одного транспортного средства и побуждать указанную систему регулирования тягового усилия перемещать указанное транспортное средство, если указанный контроллер принял решение реализовывать указанный запрос на перемещение, на основании оценки режима работы по меньшей мере одного указанного транспортного средства.
5. Система дистанционного управления по п.4, в которой:
указанный контроллер взаимодействует с указанной системой тяги указанного транспортного средства, чтобы определить, что указанное транспортное средство движется, причем движение указанного транспортного средства соответствует, по меньшей мере, одному указанному режиму работы;
причем указанный контроллер сконфигурирован так, чтобы принять решение не реализовывать указанный запрос на перемещение, если по меньшей мере один указанный режим работы свидетельствует о том, что указанное транспортное средство движется.
6. Система дистанционного управления по п.4, которая дополнительно содержит по меньшей мере один датчик, соединенный по цепи связи с указанным контроллером, причем все указанные датчики сконфигурированы так, чтобы обнаруживать присутствие объекта, расположенного на платформе указанного транспортного средства, причем оценка при помощи указанного контроллера режима работы по меньшей мере указанного транспортного средства содержит состояние (статус) каждого датчика, при этом указанный контроллер сконфигурирован так, чтобы принять решение не реализовывать указанный запрос на перемещение, если указанное состояние по меньшей мере от одного датчика указывает на присутствие объекта.
7. Система дистанционного управления по п.4, в которой:
указанный контроллер взаимодействует с системой рулевого управления указанного транспортного средства, чтобы определить, что указанное транспортное средство имеет угол поворота в заданных пределах, причем указанный угол поворота указанного транспортного средства соответствует, по меньшей мере, одному указанному режиму работы;
причем указанный контроллер сконфигурирован так, чтобы не реализовывать указанный запрос на перемещение или сначала взаимодействовать с указанной системой рулевого управления, чтобы скорректировать указанный угол поворота и ввести его в указанные заданные пределы, если, по меньшей мере, один указанный режим работы свидетельствует о том, что указанный угол поворота превышает указанные заданные пределы.
8. Система дистанционного управления по п.1, в которой указанный контроллер взаимодействует с указанной системой регулирования тягового усилия, чтобы побуждать указанное транспортное средство двигаться по инерции до остановки, при обнаружении заданного события остановки, связанного с перемещением указанного транспортного средства под дистанционным радиоуправлением, в ответ на получение указанного сигнала первого типа.
9. Система дистанционного управления по п.8, в которой указанное событие остановки содержит превышение указанным транспортным средством, по меньшей мере, заданного максимального расстояния, непрерывно проходимого без остановки, и/или превышение заданного максимального времени непрерывного перемещения без остановки, под дистанционным радиоуправлением, в ответ на получение указанного сигнала первого типа.
10. Система дистанционного управления по п.1, в которой указанный контроллер взаимодействует с системой управления тормозом, связанной с указанным транспортным средством, чтобы включать тормоз для остановки указанного транспортного средства при обнаружении заданного события, связанного с перемещением указанного транспортного средства под дистанционным радиоуправлением, в ответ на получение указанного сигнала первого типа.
11. Система дистанционного управления по п.10, в которой указанное заданное остановки содержит превышение указанным транспортным средством, по меньшей мере, заданного максимального расстояния, непрерывно проходимого без остановки, и/или превышение заданного максимального времени непрерывного перемещения без остановки, под дистанционным радиоуправлением, в ответ на получение указанного сигнала первого типа.
12. Система дистанционного управления по п.1, в которой указанное носимое устройство дистанционного радиоуправления дополнительно содержит блок управления отключением, причем срабатывание указанного блока управления отключением побуждает указанный радиопередатчик передавать сигнал второго типа, требующий остановки транспортного средства;
причем указанный контроллер побуждает указанное транспортное средство останавливаться в ответ на прием указанного сигнала второго типа и побуждает отключать питание указанного транспортного средства, если указанное транспортное средство перемещается под дистанционным радиоуправлением, в ответ на получение указанного сигнала первого типа.
13. Система дистанционного управления по п.1, в которой указанный контроллер сконфигурирован для игнорирования команд от указанного носимого устройства дистанционного радиоуправления, если указанное носимое устройство дистанционного радиоуправления находится на расстоянии более чем 25 футов (7,62 м).
14. Система дистанционного управления по п.1, которая дополнительно содержит код идентификации оператора, вводимый в указанный контроллер ранее реагирования указанного транспортного средства на указанный сигнал первого типа.
15. Способ управления системой дистанционного управления транспортного средства для погрузочно-разгрузочных работ, который включает в себя следующие операции:
использование транспортного средства для погрузочно-разгрузочных работ, которое содержит силовой агрегат, содержащий по меньшей мере одно колесо и погрузочно-разгрузочный узел, содержащий пару вилочных захватов;
использование оператором, взаимодействующим с указанным транспортным средством для погрузочно-разгрузочных работ, носимого устройства дистанционного радиоуправления, причем указанное носимое устройство дистанционного радиоуправления содержит радиопередатчик и устройство управления перемещением, соединенное по цепи связи с указанным радиопередатчиком, причем срабатывание указанного устройства управления перемещением побуждает указанный радиопередатчик передавать по радиосвязи запрос перемещения в виде сигнала первого типа, который побуждает указанное транспортное средство перемещаться в первом направлении;
использование приемника, связанного с указанным транспортным средством и предназначенного для приема на указанном транспортном средстве сообщений от указанного радиопередатчика; и
использование контроллера, связанного с указанным транспортным средством, который соединен по цепи связи с указанным приемником и с системой регулирования тягового усилия указанного транспортного средства, причем указанный контроллер получает указанный сигнал первого типа от указанного приемника; где указанный контроллер соединен по цепи связи с по меньшей мере одним датчиком, и каждый из указанных датчиков сконфигурирован для обнаружения наличия объекта поблизости от указанного транспортного средства; при этом указанный контроллер взаимодействует с системой управления тормозом, связанной с указанным транспортным средством, чтобы включать тормоз для остановки указанного транспортного средства, если указанное транспортное средство перемещается под дистанционным радиоуправлением, в ответ на прием указанного сигнала первого типа, и если по меньшей мере один датчик обнаруживает объект на пути перемещения указанного транспортного средства.
16. Способ по п.15, в котором контроллер в ответ на прием указанного сигнала первого типа от указанного приемника производит оценку режима работы по меньшей мере одного транспортного средства, чтобы принять решение о том, следует ли реализовывать указанный запрос на перемещение на основании оценки режима работы по меньшей мере одного транспортного средства и побуждать указанную систему регулирования тягового усилия перемещать указанное транспортное средство, если указанный контроллер принял решение реализовывать указанный запрос на перемещение, на основании оценки режима работы по меньшей мере одного указанного транспортного средства.
17. Способ по п.16, который дополнительно предусматривает выбор конфигурации указанного транспортного средства с возможностью перемещения силового агрегата сначала, в ответ на указанный запрос на перемещение, если указанный контроллер разрешил реализовывать указанный запрос на перемещение.
18. Способ по п.15, который дополнительно предусматривает ограничение скорости перемещения указанного транспортного средства до заданной максимальной скорости, если указанное транспортное средство перемещается под дистанционным радиоуправлением, в ответ на получение указанного сигнала первого типа.
19. Способ по п.15, в котором указанный контроллер сконфигурирован так, чтобы побуждать указанную систему регулирования тягового усилия перемещать указанное транспортное средство, пока обнаруживают состояние включения указанного устройства управления перемещения на указанном носимом устройстве дистанционного радиоуправления, если только указанное транспортное средство не превышает заданное максимальное расстояние или если не превышено максимальное время перемещения, в ответ на указанный сигнал первого типа, несмотря на непрерывное обнаружение состояния включения устройства управления перемещением.
20. Способ по п.15, в котором использование носимого устройства дистанционного радиоуправления дополнительно предусматривает:
использование перчатки, имеющей кнопку на пальце и схему, которая соединяет указанную кнопку с областью стыковки на указанной перчатке;
причем включение указанной кнопки включает указанное устройство управления перемещением; и
использование указанного радиопередатчика на установленном с возможностью отсоединения устройстве связи, которое временно состыковано с указанной областью стыковки указанной перчатки, чтобы соединять указанный радиопередатчик с указанной кнопкой.
| US 2001035729 A1, 01.11.2001 | |||
| US 6548982 B1, 15.04.2003 | |||
| Устройство для сушки сельскохозяйственного корма | 1988 |
|
SU1764562A1 |
| US 2002116117 A1, 22.08.2002 | |||
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |

