Изобретение относится к гидросистемам крано-манипуляторных установок и других грузоподъемных машин.
Известен ряд аналогов изобретения как отечественной, так и зарубежной разработки (см., например, SU 411030, В 66 С 23/86, В 60 Р 1/16, 15.01.1974 г.; Пат. 5421155 США, F 16 D 31/02, 06.06.95 г. /Hirata Toichi, Sugigama Genroku, Jshikawa Koji, Ochiai Masami, Hitachi Construction Machinery Co., Ltd. №211417, Заявл. 25.08.93, Приоритет 25.08.92 №4-226031/; гидросистему МКС-4032, сведения о которой приведены в “Пособии для операторов (машинистов) по безопасной эксплуатации кранов-манипуляторов”, составитель Н.А.Шишков, М., НПО ОБТ, 1995 г. ББК 32.816Н, П62, УДК [621.856. 8-5: 658/382/3]: 658.386.06, стр.40-66, рис. 15 и др.).
Подавляющее большинство из известных гидросистем крано-манипуляторных установок и других грузоподъемных машин построено на традиционной элементной базе и относительно устаревших технических решениях, не позволяющих добиться необходимого совершенства управления ими и безопасности проведения работ, отвечающих современному техническому уровню, а следовательно, и конкурентоспособности машин рассматриваемого класса.
Достаточно подробно данная проблематика рассмотрена в статьях А.В.Рустановича (ОАО "ВНИИстройдормаш") и В.И.Дорошенко, А.А.Гинзбурга (ГСКТБ ГА, г. Гомель), опубликованных на стр. 13-20 и 34-38 журналов СДМ №10 за 1995 и №5 за 1998 годы, М., изд. "Машиностроение", "Строительные и дорожные машины".
Помимо этого во многих из известных крано-манипуляторных установках гидравлические соединительные магистрали и электрические кабели системы управления прокладывают непосредственно по металлоконструкции машины с формированием в необходимых местах соответствующих полупетель (слабин) их провисания.
Однако данное техническое решение несовершенно. Наличие механических связей между неподвижными и подвижными частями машины в виде соответствующих гидравлических и кабельных жгутов относительно небольшой протяженности, обладающих определенной жесткостью, значительно ограничивает величину угла возможного относительного поворота или линейного перемещения указанных частей, что существенно снижает технические возможности машины. Увеличение же длины полупетель провисания указанных коммуникационных трактов может привести к повреждению их при случайном задевании за элементы металлоконструкции машины или перемещаемый груз и создает вполне определенную опасность для обслуживающего персонала, а также ухудшает ее товарный вид.
Одним из наиболее эффективных путей преодоления связанных с данным обстоятельством технических затруднений является применение чувствительных к нагрузке гидросистем, в которых управление входными параметрами гидропривода (расходом и давлением в напорной линии) реализуется на основе обратной связи по выходным параметрам системы (максимальному давлению в исполнительных органах и их суммарному расходу), оснащение их соответствующими устройствами безопасности, оптимизация схемно-компоновочных и других технических решений, а также систем управления с использованием в последних микропроцессорной техники и соответствующего программного обеспечения.
Подобного рода гидросистемы могут быть построены на основе современных, например, серийно выпускаемых ОАО “Пневмостроймашина” (г. Екатеринбург) и Гомельским ГСКТБ ГА регулируемых аксиально-поршневых насосов мод. 313 с бесступенчатым изменением мощности, снабженных чувствительным к нагрузке блоком поддержания постоянного перепада давления в управляющей линии и чувствительных к нагрузке электрогидравлических распределителей МРАМ секционного типа, обеспечивающих возможность пропорционального управления гидроприводом как дистанционно, так и напрямую в ручном режиме, интегрирования в состав указанных систем соответствующей защитно-предохранительной и регулирующей аппаратуры и использования перспективных разработок, например, ЗАО "НК Уралтерминалмаш" (г. Миасс), касающихся проблем передачи потоков рабочей жидкости и электрических сигналов от неподвижных частей машин к подвижньм и обратно, а также создания современных систем управления гидроприводом на вышеупомянутой элементной базе.
Из числа известных аналогов заявляемого технического решения ближайшим (прототипом) может служить гидросистема крано-манипуляторной установки МКС-4032, принципиальная схема и описание которой приведены соответственно на рис. 15 и стр.40-66 “Пособия для операторов (машинистов) по безопасной эксплуатации кранов-манипуляторов”, составитель Н.А. Шишков, М., НПО ОБТ, 1995 г.
Указанная гидросистема построена по открытой однонасосной схеме на традиционной элементной базе и относительно устаревших технических решениях и в связи с этим не в полной мере отвечает современному уровню.
Для подачи рабочей жидкости к выполненным на основе гидродвигателей прямолинейного движения (гидроцилиндров) исполнительным органам перемещения лап выносных аутригеров и привода механизма поворота стойки опорно-поворотного устройства, а также подъемной, выносной и телескопических секций грузоподъемной стрелы крано-манипуляторной установки и подвешиваемого на ней гидрофицированного рабочего инструмента в ней использованы нерегулируемый аксиально-поршневой насос постоянной производительности с баком и встроенным в него типовым сливным фильтром очистки указанной жидкости, снабженным заменяемым через относительно небольшие регламентированные промежутки времени работы фильтроэлементом обычной пропускной способности и грязеемкости и индикатором его засоренности манометрического типа.
Гидросистемы с насосами такого типа не адаптируются к нагрузке и существенно ограничивают функциональные и технические возможности машин.
Отсутствие в составе бака датчиков уровня и температуры рабочей жидкости электронного типа, а также особенности конструктивного исполнения использованного в его сливном фильтре индикатора засоренности сменного фильтроэлемента, практически, лишают машиниста крано-манипуляторной установки возможности оперативного получения им соответствующей информации о приближении критического состояния машины по данной группе параметров ее работы.
Управление соответствующими потоками рабочей жидкости в этой гидросистеме осуществляется двумя последовательно соединенными между собой по напорной линии без взаимной блокировки друг с другом основными гидравлическими распределителями традиционного исполнения с ручным приводом и одним дополнительным двухпозиционным электрогидравлическим распределителем, сообщающим выход насоса с баком.
При этом схемно с одним из основных распределителей скоммутированы при помощи соответствующих магистралей питания рабочие полости исполнительных органов привода механизма поворота стойки опорно-поворотного устройства, подъемной, выносной и телескопических секций стрелы, а с другим - полости исполнительных органов перемещения лап выносных аутригеров и подвешиваемого на стреле гидрофицированного рабочего инструмента.
Гидросистемы с основными распределителями такого исполнения нечувствительны к нагрузке и не обеспечивают эффективного управления машиной.
Использование в составе прототипа основных распределителей, построенных на традиционных схемных и технических решениях с ручным управлением, позволяет регулировать скорость нагруженных исполнительных органов, обеспечивающих необходимые движения стрелы и выносных аутригеров, только в относительно небольшой области перемещения золотников соответствующих рабочих секций указанных распределителей (рукояток управления). При этом чем больше нагрузка, тем соответственно меньше будет указанная область (см. фиг.32).
На начальном участке перемещения золотников гидрораспределители такого типа обладают достаточно большой нечувствительностью, а управление при помощи них указанными органами осуществляется слишком резко.
К тому же в ряде случаев, например при перемещении взрывоопасных объектов, когда оператор крано-манипуляторной установки по условиям безопасности должен находиться на соответствующем удалении от места проведения указанных работ или в специальном укрытии, использование прямого управления проблематично.
Оно крайне неудобно и при погрузке материалов в высокобортовые транспортные средства, например железнодорожные вагоны, и выгрузке их из них, а также на различного рода строительно-монтажных и других работах из-за ограниченной видимости зоны захвата груза либо разгрузки и монтажа, особенно при большой длине грузоподъемной стрелы крано-манипуляторной установки.
Особенности схемного соединения основных распределителей между собой по напорной линии делают возможной при промежуточных положениях золотников одного из них одновременную подачу рабочей жидкости к другому.
В связи с этим может иметь место совмещение движений выносных аутригеров и стрелы, что при отсутствии соответствующей блокировки в ряде случаев может привести к возникновению аварийной ситуации, а именно к потере устойчивости и опрокидыванию крана-манипулятора.
По этим, а также эргономическим, соображениям вышеупомянутая коммутация исполнительных органов с основными распределителями не совсем удачна. В конструкциях большинства известных крано-манипуляторных установок, как правило, исключают возможность управления исполнительными органами подвешиваемого на стреле гидрофицированного рабочего инструмента и входящих в состав опорно-поворотного устройства выносных аутригеров от одного распределителя.
Реализованный в конструкции прототипа ручной привод перемещения выдвижных балок выносных аутригеров целесообразен только для машин относительно небольшой грузоподъемности. В крано-манипуляторных установках тяжелого класса при достаточно большой массе указанных балок с закрепленными на их концах аутригерами предпочтительнее использовать для этого соответствующий гидропривод.
В составе известной гидросистемы имеется двухконтурный ограничитель грузоподъемности крано-манипуляторной установки, выполненный из двух независимых друг от друга и различных по исполнению и принципу работы защитных агрегатов.
Одним из указанных агрегатов является автоматический регулятор давления, выполненный в виде обычного первичного предохранительного клапана прямого действия, размещенного в клапанной секции управляющего движениями стрелы основного распределителя, а другим - электронное устройство безопасности, сформированное на основе измерителя давления рабочей жидкости с дискретным электрическим выходным сигналом. Указанный измеритель представляет собой обычное реле давления, связанное по электрическому каналу с дополнительным электрогидравлическим распределителем, сообщающим выход насоса с баком гидросистемы.
Как первичный предохранительный клапан, так и реле давления являются защитными агрегатами эпизодического действия, предназначенными для ограничения возможности повышения давления рабочей жидкости сверх установленной величины.
Конструкция обоих из них построена на основе соответствующих механических чувствительных элементов подпружиненного типа. При этом в одном случае уравновешенное внешней силой (пружиной) давление рабочей жидкости действует на клапан, плотно перекрывающий соответствующий проходной канал, а в другом - на специальный подвижный плунжер, взаимодействующий с толкателем микропереключателя реле.
При определенном сжатии пружины, соответствующем требуемому давлению, в первом случае открывается клапан, и необходимая полость высокого давления сообщается со сливом, а в другом - толкатель микропереключателя замыкает электрические цепи дополнительного распределителя гидросистемы и включения звукового сигнала транспортного средства, на котором смонтирована крано-манипуляторная установка. Дополнительный распределитель автоматически сообщает напорную магистраль насоса с баком, а звуковой сигнал оповещает оператора о возникшей критической ситуации.
Однако предохранительные клапаны подобного исполнения обладают достаточно большой нелинейностью в переходных процессах. Указанная нелинейность предохранительных клапанов обусловлена, в основном, соответствующими, действующими на них гидродинамическими силами. При этом превышение давления на предохранительном клапане при пропускании через него соответствующего расхода рабочей жидкости к перепаду давления, реализуемому при его открытии, может составлять порядка 10% и более.
Используемые в конструкции электронного устройства безопасности ограничителя грузоподъемности известной гидросистемы реле давления имеют общеизвестный недостаток, обусловленный тем, что зависимость перемещения пружины их чувствительного элемента от приложенной силы (давления) оказывается линейной только лишь в относительно небольших пределах ее деформации. Чувствительность защитных устройств такого типа зависит, в основном, от жесткости пружины и ряда других факторов и может колебаться в весьма широких пределах - от 3 до 10%.
Существенным недостатком рассматриваемой гидросистемы является то, что в ней электронное устройство безопасности установлено только в магистрали питания поршневой полости исполнительного органа привода подъемной секции стрелы, тогда как при определенной конфигурации пространственного положения ее звеньев предельная грузоподъемность может быть превышена не только по линии подъемной, но и по линии выносной секций стрелы.
Использование в указанном устройстве в качестве измерителя давления рабочей жидкости обычного реле давления эпизодического действия с дискретным электрическим выходным сигналом не позволяет кардинально разрешить в данной гидросистеме проблему текущего отображения соответствующей информации, характеризующей работу крано-манипуляторной установки, и оперативного оповещения машиниста о приближении и возникновении критического состояния, обусловленного превышением ее грузоподъемности. Более того, при возникновении такого состояния оператор может, при необходимости, нажатием соответствующих кнопок системы управления блокировать (отключить) контакты микропереключателя реле давления. При этом соответственно выключается звуковой сигнал и отключается дополнительный электрогидравлический распределитель гидросистемы с разобщением выхода насоса и бака.
После этого машинист, в принципе, может выполнить рабочую операцию с превышением допустимой грузоподъемности крано-манипуляторной установки несмотря на наличие угрозы опрокидывания машины. Такая угроза может возникнуть, если при этом по какой либо причине, например из-за заклинивания, не срабатывает первичный предохранительный клапан, размещенный в клапанной секции основного распределителя, управляющего движениями стрелы.
Гидросистема МКС-4032 не позволяет в экстремальных ситуациях кратковременно форсировать в допустимых пределах мощность гидропривода (грузоподъемность крано-манипуляторной установки). Указанная особенность чрезвычайно важна при погрузке-разгрузке материалов неупорядоченной структуры и размеров, например, металлолома, а также при разборке завалов в местах стихийных бедствий природного или техногенного характера и в ряде других, преимущественно экстремальных, случаев, когда подъем груза более важен (иногда просто жизненно необходим) нежели скорость выполнения операции.
Указанный недостаток данной гидросистемы обусловлен тем, что в ней автоматический регулятор давления двухконтурного ограничителя грузоподъемности крано-манипуляторной установки выполнен в виде обычного первичного предохранительного клапана, размещенного в клапанной секции основного распределителя, управляющего движениями стрелы.
Такой единичный первичный предохранительный клапан обычно настраивают только на одно заранее выбранное значение величины давления рабочей жидкости, соответствующее, как правило, нормальному режиму работы крано-манипуляторной установки.
По этой причине оперативно изменить непосредственно в процессе выполнения работ ограничиваемое указанным клапаном давление рабочей жидкости в рассматриваемой гидросистеме, например, в случае возникновения необходимости форсирования грузоподъемности крано-манипуляторной установки не представляется возможным.
Установленная за основным распределителем, управляющим перемещениями лап выносных аутригеров, в поршневых магистралях питания их исполнительных органов защитно-предохранительная аппаратура рассматриваемой гидросистемы выполнена в виде односторонних гидрозамков.
При установке данного подъемно-транспортного средства на опорные пяты лап выносных аутригеров подпружиненные запорные элементы таких гидрозамков пропускают рабочую жидкость в поршневые полости соответствующих исполнительных органов, а после прекращения подачи указанной жидкости - автоматически запирают проходные каналы, препятствуя ее обратному току. Для слива рабочей жидкости из поршневых полостей исполнительных органов необходимо подать ее в их штоковые полости. При этом под действием давления указанной жидкости принудительно открываются запорные элементы гидрозамков и обеспечивается свободный выход жидкости из поршневых полостей указанных органов.
Вследствие рассмотренных особенностей конструктивного исполнения такие гидрозамки не могут обеспечить силовую разгрузку лап выносных аутригеров в автоматическом режиме без участия оператора по мере заполнения транспортировочной платформы указанного подъемно-транспортного средства погружаемым материалом. В случае перегрузки они могут потерять устойчивость и выйти из строя.
Общеизвестно также, что работа односторонних гидрозамков может сопровождаться возникновением автоколебаний, характерным проявлением которых является неравномерность хода (рывки) втягиваемых лап аутригеров.
Встроенная в магистрали питания исполнительного органа привода механизма поворота стойки опорно-поворотного устройства МКС-4032 защитно-предохранительная аппаратура выполнена в виде клапанного блока с двумя соединяющими их друг с другом перепускными предохранительными клапанами.
Данное техническое решение не предусматривает возможности подпитки рабочей жидкостью соответствующих полостей исполнительного органа привода механизма поворота стойки, когда в них возникает пониженное давление, например при резком торможении перемещаемого в окружном направлении груза. И чем больше угловая скорость тормозимого груза, тем больше вероятность возникновения в указанных полостях разрежения. Указанное разрежение приводит к неравномерности движения стойки и образованию кавитации, способствующей соответствующему повреждению рабочих поверхностей вышеупомянутых исполнительных органов.
В прототипе в магистралях питания исполнительных органов привода подъемной и выносной секций стрелы установлены запорно-тормозные клапаны. Указанные клапаны выполняют функцию односторонних гидрозамков и обеспечивают плавное опускание подъемной и выносной секций стрелы в режиме автоматического дросселирования потока рабочей жидкости из поршневых полостей исполнительных органов.
Такой вид защиты используется в основном при относительно небольших скоростях перемещения штоков исполнительных органов. При нагрузках, близких к предельным, например реализуемых в процессе резкого торможения опускаемого груза, каждый раз, очевидно, автоматически будет срабатывать реле давления двухконтурного ограничителя грузоподъемности, после чего специальными кнопками системы управления необходимо выключать электромагнит дополнительного распределителя, чтобы восстановить работоспособность гидросистемы.
Часть из исполнительных органов привода выдвижных секций стрелы построена по телескопической схеме, а встроенная в их магистрали питания защитно-предохранительная аппаратура выполнена в виде двухстороннего гидрозамка, термоаварийного и двух напорных клапанов. При этом гидрозамок двухстороннего действия запирает обе полости исполнительных органов и открывается автоматически при подаче рабочей жидкости в ту или иную полость. Термоклапан исключает значительное повышение давления в штоковых полостях исполнительных органов за счет расширения рабочей жидкости при нагреве, когда заперты обе их полости. Аварийный клапан предотвращает самопроизвольное выдвижение штока телескопического исполнительного органа при повреждении гибкого шланга. Напорные клапаны служат для обеспечения необходимой последовательности выдвижения и втягивания секций телескопа.
В целом данный фрагмент известной гидросистемы достаточно сложен в исполнении и, следовательно, менее надежен в работе.
Управляющий движением лап выносных аутригеров и работой подвешиваемого на стреле крано-манипуляторной установки гидрофицированного инструмента основной распределитель сообщен с исполнительными органами последнего посредством соответствующих магистралей питания напрямую, без встраивания в них какой-либо защитно-предохранительной аппаратуры. В этом случае давление рабочей жидкости в соответствующих полостях исполнительных органов привода указанного инструмента ограничивается только первичным предохранительным клапаном, размещенным в клапанной секции второго из основных распределителя. Указанное обстоятельство значительно сужает возможности использования в составе крано-манипуляторной установки покупных гидрофицированных рабочих инструментов, рассчитанных на иное давление. Отсутствие в указанных магистралях питания специальных обратно-предохранительных клапанов не позволяет осуществить автоматическую подпитку соответствующих полостей исполнительных органов привода рабочих инструментов жидкостью при резком изменении скоростей выполняемых с их использованием операций, в результате чего в них может возникнуть кавитация.
Стационарно закрепленные на неподвижной части опорно-поворотного устройства, которой является его основание, фрагменты гидравлических соединительных магистралей и электрических кабелей сопряжены с размещенными на подвижной части указанного устройства, которой является его стойка, и перемещающимися совместно с ней в окружном направлении их ответными фрагментами при помощи соответствующих гибких компенсационных вставок.
Такое же техническое решение использовано в прототипе и для подвода рабочей жидкости к исполнительным органам гидрофицированных инструментов на участке телескопирования стрелы. Недостатки такого рода решений рассмотрены выше по тексту при описании аналогов изобретения.
Система управления прототипа тоже построена на традиционной элементной базе и относительно устаревших технических решениях со всеми вытекающими из этого последствиями.
Задачей настоящего изобретения является устранение вышеупомянутых недостатков известных аналогов и прототипа заявляемой гидросистемы крано-манипуляторной установки, а именно улучшение ее технико-эксплуатационных и других качеств, позволяющее достигнуть современного технического уровня и конкурентоспособности грузоподъемных машин рассматриваемого класса.
В соответствии с изобретением она достигается конкретной совокупностью существенных признаков заявляемой гидросистемы.
К совокупности существенных признаков, характеризующих заявляемую гидросистему крано-манипуляторной установки, относятся:
- наличие в ней гидродвигателей исполнительных органов перемещения лап выносных аутригеров, привода механизма поворота стойки опорно-поворотного устройства, подъемной, выносной и телескопических секций грузоподъемной стрелы и подвешиваемого на ней гидрофицированного рабочего инструмента;
- наличие в ней аксиально-поршневого насоса с баком и встроенным в него сливным фильтром очистки рабочей жидкости;
- наличие в ней двух основных, управляющих исполнительными органами распределителей секционного исполнения со встроенными в их клапанные секции защитно-предохранительными агрегатами, представляющими собой автоматические регуляторы давления эпизодического действия клапанного типа, и одного дополнительного двухпозиционного электрогидравлического распределителя, сообщающего выход насоса с баком;
- наличие в ней двухконтурного ограничителя грузоподъемности крано-манипуляторной установки, выполненного из двух независимых друг от друга защитно-предохранительных агрегатов, одним из которых является размещенный в клапанной секции управляющего стреловым оборудованием основного распределителя автоматический регулятор давления, настроенный на максимально допустимую в соответствующем контуре величину давления, эквивалентную предельному значению грузоподъемности, а другим - электронное устройство безопасности, содержащее измеритель давления рабочей жидкости в поршневой полости исполнительного органа привода подъемной секции стрелы с электрическим выходным сигналом;
- наличие в ней защитно-предохранительной и регулирующей аппаратуры с гидравлическими соединительными магистралями, выполненными в виде совокупности жестких трубопроводов и состыкованных с ними компенсационных вставок из гибких шлангов, обеспечивающих необходимое удобство монтажа и беспрепятственность перемещения подвижных звеньев крано-манипуляторной установки;
- наличие в ней системы управления с кабелями;
- наличие в ней двух гидравлических автономных исполнительных органов, обеспечивающих выдвижение балок крепления лап аутригеров;
- выполнение аксиально-поршневого насоса регулируемым, с возможностью бесступенчатого изменения мощности и снабжение чувствительным к нагрузке блоком поддержания постоянного перепада давления между выходом насоса и напорным трубопроводом наиболее нагруженного исполнительного органа;
- выполнение одного из двух вышеупомянутых основных распределителей, управляющих стреловым оборудованием, в виде чувствительного к нагрузке электрогидравлического распределительного модуля с пропорциональным управлением, в котором размещенный в его входной клапанной секции автоматический регулятор давления выполнен в виде предохранительного клапана непрямого действия, состоящего из основного и вспомогательного предохранительных клапанов, и установка в этой же секции клапана разности давлений и соответствующего ограничителя расхода, а также добавление двух к имеющимся рабочим секциям распределителя дополнительных секций, скоммутированных при помощи соответствующих магистралей питания с исполнительными органами привода гидрофицированного рабочего инструмента, причем в составе каждой из рабочих секций имеются клапан разности давлений регулируемого типа и установленный в чувствительном к нагрузке тракте обратный клапан, а расположенные в этих секциях запорно-регулирующие золотники управляются двумя редукционными клапанами с пропорциональными электромагнитами с обеспечением фиксации их линейного положения индуктивным датчиком, обладающим высокой степенью разрешения, а сливное отверстие замыкающей крышки указанного распределителя заглушено;
- выполнение другого основного распределителя с аналогичными по конструктивному исполнению входной клапанной секцией и замыкающей крышкой, а также с тремя рабочими секциями, которые выполнены с электрическими приводами линейного перемещения золотников с двумя релейными электромагнитами прямого действия;
- сообщение одной из рабочих секций второго основного распределителя напрямую при помощи запараллеленных между собой магистралей питания с поршневьми и штоковыми полостями гидравлических исполнительных органов перемещения выдвижных балок крепления аутригеров;
- подсоединение обоих основных распределителей к напорной магистрали через вспомогательный двухпозиционный электрогидравлический распределитель переключения режимов работы крано-манипуляторной установки с задействованием механизма поворота стойки опорно-поворотного устройства и стрелового оборудования с гидрофицированным рабочим инструментом на задействование выносных аутригеров и обратно, при отсутствии управляющей команды на электромагните пилота которого золотник его находится в открытом положении и соединяет выход насоса с первым из основных распределителей, а слив - со вторым и, наоборот, при подаче команды на электромагнит слив соединяется с первым распределителем, а напор - со вторым из них;
- сообщение входов размещенных в клапанных секциях основных распределителей ограничителей расхода посредством управляющих магистралей с чувствительным к нагрузке блоком насоса, а выходов - со сливной магистралью;
- выполнение каждого из распределителей с возможностью его дистанционного управления путем использования их управляющих электромагнитов и управления вручную посредством ручного перемещения золотников при помощи соответствующих рукояток рычажного типа;
- последовательная установка на выходе из насоса перед вспомогательным распределителем обратного клапана с напорным фильтром очистки рабочей жидкости и встроенного в напорную магистраль между указанным фильтром и дополнительным распределителем редукционного клапана, сообщенного через двухкромочный золотник чувствительного к нагрузке блока насоса с рабочей полостью привода его регулятора мощности;
- выполнение установленной за вторым основным распределителем в поршневых магистралях питания исполнительных органов перемещения лап выносных аутригеров защитно-предохранительной аппаратуры в виде двух тормозных клапанов навесного типа с заглушенными входами их клапанов "ИЛИ", снабженных управляемыми при помощи подаваемой в штоковые полости указанных органов рабочей жидкостью нормально закрытыми запорными элементами, настроенными на восприятие лапами максимально допустимых по условиям эксплуатации значений величин действующих на них рабочих усилий, и автоматически открывающихся при их превышении;
- выполнение встроенной в магистрали питания исполнительных органов привода механизма поворота стойки опорно-поворотного устройства и телескопических выдвижных секций стрелы защитно-предохранительной аппаратуры в виде обратно-предохранительных клапанов, сгруппированных в размещенный за первым основным распределителем обособленный клапанный блок секционного типа;
- встраивание в магистрали питания рабочей жидкостью исполнительных органов привода гидрофицированного инструмента соответствующих обратно-предохранительных клапанов, размещенных в клапанном блоке такой же как и установленной в магистралях питания исполнительных органов привода механизма поворота стойки опорно-поворотного устройства и телескопических выдвижных секций стрелы защитно-предохранительной аппаратуры;
- выполнение установленной в поршневых и штоковых магистралях питания исполнительных органов привода подъемной и выносной секций стрелы защитно-предохранительной и регулирующей аппаратуры в виде двух автономных блоков, каждый из которых содержит два предохранительных клапана, гидрозамок, клапан разности давлений, подпорный и два обратных клапана, причем гидрозамок, клапан разности давлений и один из предохранительных клапанов последовательно встроены в поршневую магистраль с сообщением выходов предохранительного клапана и клапана разности давлений со сливом, а управляющей полости гидрозамка - со штоковой магистралью, подпорный и второй из предохранительных клапанов последовательно встроены в штоковую магистраль с сообщением выхода последнего из них со сливом, один из обратных клапанов установлен в поршневой магистрали в обход гидрозамка и клапана разности давлений, а другой - в штоковой магистрали в обход подпорного клапана;
- выполнение гидравлических исполнительных органов привода всех выдвижных телескопических секций стрелы в виде автономных силовых гидроцилиндров двойного действия с односторонними полыми штоками, за исключением замыкающего, через которые проложены напроход герметизированные друг от друга тракты, последовательно сообщающие через соответствующие внешние соединительные гидравлические магистрали, поршневые и штоковые полости каждого из указанных гидроцилиндров между собой для обеспечения прохода рабочей жидкости в них и обратно, причем в каждую из внешних штоковых магистралей встроены обратно-предохранительные клапаны, предохранительные клапаны которых настроены с учетом соответствующих сил трения в подвижных соединениях телескопических секций на одинаковый перепад давления такой величины, чтобы суммарное сопротивление перемещению первой выдвижной секции было бы минимальным, а далее возрастало до максимального значения при перемещении замыкающей секции;
- выполнение поршней и штоков исполнительных органов привода всех выдвижных телескопических секций стрелы одинаковыми по диаметру, а их внутренних трактов и внешних гидравлических магистралей, последовательно сообщающих рабочие полости указанных органов, - равными по проходным сечениям;
- снабжение двухконтурного ограничителя грузоподъемности вторым, разобщенным с первым, автоматическим регулятором давления, выполненным в виде установленного в напорной магистрали между дополнительным распределителем и сливным фильтром очистки рабочей жидкости автономного предохранительного клапана, настроенного на околопредельную в сторону уменьшения по сравнению с первым величину предельного давления, эквивалентную допустимому значению грузоподъемности для нормального режима работы крано-манипуляторной установки;
- выполнение входящего в состав электронного устройства безопасности двухконтурного ограничителя грузоподъемности измерителя давления жидкости в поршневой полости исполнительного органа привода подъемной секции стрелы в виде интегрированного в блок защиты указанного исполнительного органа датчика давления аналогового типа, электрически соединенного посредством соответствующего кабеля с системой управления;
- введение такого же измерителя для контроля давления рабочей жидкости в поршневой полости исполнительного органа привода выносной секции стрелы и в состав встроенного в магистрали питания данного исполнительного органа другого блока защиты с идентичным подсоединением его к указанной полости и системе управления;
- сопряжение стационарно закрепляемых на неподвижной части опорно-поворотного устройства, которой является его основание, фрагментов гидравлических соединительных магистралей и кабелей системы управления с соответствующими размещаемыми на подвижной части указанного устройства, которой является его стойка, и перемещающимися совместно с ней в окружном направлении их ответными фрагментами при помощи устанавливаемого при сборке крано-манипуляторной установки во внутреннюю полость стойки съемного многоканального электрогидравлического коммуникационного соединителя поворотного типа;
- встраивание в магистрали питания каждого из исполнительных органов привода гидрофицированного инструмента на участке телескопирования стрелы двухканального гидравлического поворотного соединителя с натяжным барабаном для намотки подсоединяемых к нему гибких шлангов соответствующих компенсационных вставок указанных магистралей, свободные концы которых снабжены присоединителями, выполненными в виде жестко закрепляемых на консольной части замыкающей выдвижной телескопической секции стрелы отжимных клапанов с замковыми механизмами фиксации шарикового типа пристыковываемых к ним съемных ответных концевых присоединителей исполнительных органов указанного инструмента;
- снабжение бака встроенными в него электронными датчиками уровня и температуры рабочей жидкости;
- установка в сливном и напорном фильтрах очистки рабочей жидкости фильтроэлементов с индикаторами их засоренности электронного типа и предохранительно-перепускных клапанов;
- наличие в системе управления гидросистемы размещаемых на опорно-поворотном устройстве приемно-командных электронных модулей и переносного дистанционного пульта управления, построенных на микропроцессорной основе, причем указанный пульт снабжен кнопкой подачи предупредительных звуковых сигналов, двухпозиционной кнопкой переключения режимов работы крано-манипуляторной установки “Стойка, стрела - аутригеры”, клавишами управления исполнительными органами привода механизма поворота стойки, соответствующих секций стрелы, подвешиваемого на ней гидрофицированного рабочего инструмента и перемещения выдвижных балок и лап выносных аутригеров, кнопкой аварийного останова, резервными переключателями, жидкостно-кристаллическим дисплеем для отражения визуальной информации о температуре окружающей среды и рабочей жидкости в баке, текущем режиме работы, отработанных моточасах, степени засоренности фильтров очистки рабочей жидкости, с указанием засоренного фильтра, падении уровня жидкости в баке ниже допустимой нормы, достижении соответствующей величины грузоподъемного момента в основном режиме работы и режиме форсирования грузоподъемности, причем дистанционный пульт управления имеет световой сигнальный индикатор красного цвета и зуммер для подачи звуковых сигналов для привлечения внимания оператора в необходимых случаях.
Совпадающими в прототипе и заявляемом изобретении являются первые шесть из существенных признаков, приведенных в данном перечне, а остальные - отличительными.
При этом все из указанных отличительных признаков относятся к существенным, поскольку каждый из них соответствующим образом (в той или иной мере) влияет на достигаемый при осуществлении заявляемого изобретения технический результат, т.е. находятся с ним в причинно-следственной связи.
Характер указанного влияния применительно к каждому из отличительных признаков детально рассмотрен ниже по тексту при пояснении сущности заявляемого изобретения.
Сущность изобретения поясняется чертежами, где изображены:
На фиг.1 - Схема гидравлическая принципиальная заявляемой гидросистемы (золотники всех распределителей находятся в исходном положении);
На фиг.2 - Фрагмент А (см. фиг.1) гидросистемы, поясняющий особенности типовой схемной коммутации рабочих полостей одного из исполнительных органов (гидромотора привода механизма поворота стойки опорно-поворотного устройства крано-манипуляторной установки) с запорно-регулирующим золотником соответствующей рабочей секции основного чувствительного к нагрузке распределителя (золотник указанной секции перемещен из нейтрального положения вправо);
На фиг.3 - Тот же самый фрагмент А, что и на фиг.2 (золотник рабочей секции основного чувствительного к нагрузке распределителя перемещен из нейтрального положения влево);
На фиг.4 - Фрагмент Б (см. фиг.1) гидросистемы, поясняющий особенности типовой схемной коммутации рабочих полостей гидроцилиндров выноса аутригеров опорно-поворотного устройства крано-манипуляторной установки с запорно-регулирующим золотником соответствующей рабочей секции основного чувствительного к нагрузке распределителя (золотник указанной секции перемещен из нейтрального положения влево);
На фиг.5 - Тот же самый фрагмент Б, что и на фиг.4 (золотник рабочей секции распределителя перемещен из нейтрального положения вправо);
На фиг.6 - Фрагмент В (см. фиг.1) гидросистемы, поясняющий особенности коммутации ее основных распределителей с золотником вспомогательного распределителя (золотник перемещен из исходного положения вправо);
На фиг.7 - Фрагмент Г (см. фиг.1) гидросистемы, поясняющий особенности коммутации автономного предохранительного клапана двухконтурного ограничителя грузоподъемности с напорной и сливной магистралями посредством соответствующего перемещения золотника дополнительного распределителя (золотник перемещен из исходного положения вниз);
На фиг.8 - Схема гидравлическая соединений заявляемой гидросистемы (ТК - тормозной клапан);
На фиг.9 - Общий вид в аксонометрической проекции крано-манипуляторной установки, в которой использована заявляемая гидросистема, в рабочем положении, с крюковым вариантом подвешиваемого на ее стреле рабочего инструмента;
На фиг.10 - Вид Д (см. фиг.9) сверху на опорно-поворотное устройство крано-манипуляторной установки;
На фиг.11 - Вид Е (см. фиг.9) в аксонометрической проекции на напорный фильтр очистки рабочей жидкости и вспомогательный двухпозиционный электрогидравлический распределитель переключения режимов работы крано-манипуляторной установки;
На фиг.12 - Вертикальный разрез Ж-Ж (см. фиг.10) опорно-поворотного устройства крано-манипуляторной установки в плоскости расположения механизма поворота стойки и многоканального электрогидравлического коммуникационного соединителя поворотного типа;
На фиг.13 - Продольный разрез И-И (см. фиг.12) электрогидравлического многоканального коммуникационного соединителя поворотного типа (подстыковываемые к соединителю гидравлические магистрали и кабели условно не показаны);
На фиг.14 - Выносной элемент К (см. фиг.12), поясняющий характер кинематического соединения водила стойки опорно-поворотного устройства с поводком гильзы электрогидравлического многоканального коммуникационного соединителя поворотного типа;
На фиг.15 - Выносной элемент Л (см. фиг.12), поясняющий особенности кинематического соединения гидромотора с расположенной снаружи открытой зубчатой механической передачей механизма поворота стойки опорно-поворотного устройства крано-манипуляторной установки через зубчатый планетарный редуктор;
На фиг.16 - Продольный разрез М-М (см. фиг.13) встроенного в многоканальный электрогидравлический коммуникационный соединитель поворотного типа многоканального токоизолированного поворотного скользящего токосъемника;
На фиг.17 - Поперечный разрез Н-Н (см. фиг.16) токосъемника;
На фиг.18 - Вид О (см. фиг.9) сверху на грузоподъемную стрелу крано-манипуляторной установки;
На фиг.19 - Вид П (см. фиг.18) сбоку на грузоподъемную стрелу со стороны расположения на ней двухканальных гидравлических поворотных соединителей барабанного типа для подвода рабочей жидкости к исполнительным органам гидрофицированного рабочего инструмента;
На фиг.20 - Общий вид фрагмента консольной части грузоподъемной стрелы крано-манипуляторной установки с подвешенным на ней гидрофицированным рабочим инструментом;
На фиг.21 - Вид Р (см. фиг.20) спереди на фрагмент консольной части грузоподъемной стрелы крано-манипуляторной установки с подвешенным на ней гидрофицированным рабочим инструментом;
На фиг.22 - Поперечное сечение С-С (см. фиг.19) грузоподъемной стрелы крано-манипуляторной установки по месту расположения на ней двухканальных гидравлических поворотных соединителей барабанного типа для подвода рабочей жидкости к исполнительным органам гидрофицированного рабочего инструмента;
На фиг.23 - Вид Т (см. фиг.22) с тыльной стороны на двухканальный гидравлический поворотный соединитель барабанного типа для подвода рабочей жидкости к исполнительным органам гидрофицированного рабочего инструмента;
На фиг.24 - Вид У (см. фиг.20) спереди на замыкающую выдвижную телескопическую секцию в зоне закрепления на ней присоединителей намотанных на натяжные барабаны двухканальных гидравлических поворотных соединителей гибких шлангов компенсационных вставок магистралей питания рабочей жидкостью исполнительных органов гидрофицированного рабочего инструмента;
На фиг.25 - Разрез Ф-Ф (см. фиг.24) по одному из мест закрепления на консольной части замыкающей секции стрелы крано-манипуляторной установки присоединителей гибких шлангов компенсационных вставок магистралей питания рабочей жидкостью исполнительных органов гидрофицированного рабочего инструмента;
На фиг.26 - Схема нагружения телескопической части стрелы крано-манипуляторной установки вертикальной сосредоточенной силой F, приложенной к ее свободному концу, с эпюрами соответствующих изгибающих моментов (верхняя эпюра - для указанной части стрелы с выдвинутыми в крайнее положение всеми ее телескопическими секциями, нижняя эпюра - для той же самой части стрелы с выдвинутой в крайнее положение только ее замыкающей телескопической секцией, А - точка приложения вертикальной сосредоточенной силы F к свободному концу стрелы с выдвинутыми в крайнее положение всеми ее телескопическими секциями, Б - точка защемления первой выдвижной телескопической секции стрелы в полости ее выносной секции, l - вылет телескопической части стрелы, М - изгибающий момент);
На фиг.27 - Вид сбоку в аксонометрической проекции на бак заявляемой гидросистемы (в верхнем и нижнем ракурсах с соответствующими выносными элементами);
На фиг.28 - Общий вид сливного фильтра заявляемой гидросистемы;
На фиг.29 - Общий вид напорного фильтра заявляемой гидросистемы;
На фиг.30 - Вид Х (см. фиг.29) сверху на напорный фильтр;
На фиг.31 - Общий вид в аксонометрической проекции дистанционного пульта управления;
На фиг.32 - Графическая зависимость скорости вращения выходного вала гидромотора механизма поворота стойки опорно-поворотного устройства крано-манипуляторной установки от перемещения золотника гидравлического распределителя традиционного исполнения с прямым управлением (n - скорость вращения выходного вала гидромотора, об/мин; Хз - перемещение золотника, мм; M1,2 - моменты нагрузки, M2>M1);
На фиг.33 - Графическая зависимость скорости вращения выходного вала гидромотора механизма поворота стойки опорно-поворотного устройства крано-манипуляторной установки от перемещения управляющей клавиши дистанционного пульта управления заявляемой гидросистемой (n - скорость вращения выходного вала гидромотора, об/мин; Хр - перемещение клавиши, мм; 1 - характер изменения указанной зависимости, обусловленный особенностями схемного исполнения электроники системы управления; 2 - один из возможных вариантов изменения указанной зависимости при соответствующем программировании электроники системы управления).
Заявляемая гидросистема 1 крано-манипуляторной установки 2 содержит выполненные в виде гидродвигателей соответствующего типа исполнительные органы 3-13 перемещения лап 14, 15 выносных аутригеров 16, 17 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20, подъемной, выносной и телескопических секций 21-26 грузоподъемной стрелы 27 и подвешиваемого на ней гидрофицированного рабочего инструмента 28, например двухчелюстного грейфера, вращающегося в горизонтальной плоскости вокруг своей оси, аксиально-поршневой насос 29 с баком 30 и встроенным в него сливным фильтром 31 очистки рабочей жидкости, два основных, управляющих исполнительными органами распределителя 32, 33 секционного исполнения со встроенными в их клапанные секции 34 защитно-предохранительными агрегатами 35, представляющими собой автоматические регуляторы давления эпизодического действия клапанного типа и один дополнительный двухпозиционный электрогидравлический распределитель 36, сообщающий выход насоса с баком, двухконтурный ограничитель грузоподъемности 37 крано-манипуляторной установки, выполненный из двух независимых друг от друга защитно-предохранительных агрегатов, одним из которых является размещенный в клапанной секции 34 управляющего стреловым оборудованием основного распределителя 32 автоматический регулятор давления 35, настроенный на максимально допустимую в соответствующем контуре величину давления, эквивалентную предельному значению грузоподъемности, а другим - электронное устройство безопасности 38, содержащее измеритель давления 39 рабочей жидкости в поршневой полости 40 исполнительного органа 6 привода подъемной секции 21 стрелы с электрическим выходным сигналом, защитно-предохранительную и регулирующую аппаратуру с гидравлическими соединительными магистралями, выполненными в виде совокупности жестких трубопроводов и состыкованных с ними компенсационных вставок из гибких шлангов, обеспечивающих необходимое удобство монтажа и беспрепятственность перемещения подвижных звеньев крано-манипуляторной установки, и систему управления 41 с кабелями 42.
Для выноса лап 14, 15 аутригеров 16, 17 в заявляемой гидросистеме 1 имеются два гидравлических автономных исполнительных органа 43, 44, обеспечивающих выдвижение балок 45, 46 крепления лап аутригеров.
Указанное техническое решение кардинальным образом облегчает выполнение данной операции в крано-манипуляторных установках тяжелого класса при достаточно большой массе выдвигаемых балок с закрепленными на их концах лапами выносных аутригеров.
Конструктивно большинство из входящих в состав заявляемой гидросистемы исполнительных органов 3, 4, 6-11, 13 и 43, 44 выполнены в виде хорошо зарекомендовавших себя в эксплуатации автономных одноступенчатых силовых гидроцилиндров двойного действия с односторонними полыми штоками, представляющих собой гидродвигатели прямолинейного возвратно-поступательного движения.
Исполнительные органы 5 и 12 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20 и вращения гидрофицированного рабочего инструмента 28 в горизонтальной плоскости выполнены соответственно в виде реверсивных нерегулируемых гидромотора, например, аксиально-поршневого типа и ротатора, представляющего собой гидродвигатель поворотного действия с ограниченным или бесконечным углом поворота.
Аксиально-поршневой насос 29 гидросистемы 1 выполнен регулируемым, с возможностью бесступенчатого изменения мощности и снабжен чувствительным к нагрузке блоком 47 поддержания постоянного перепада давления, порядка 20 кгс/см2, между выходом насоса и напорным трубопроводом наиболее нагруженного исполнительного органа, сообщенным с управляющей магистралью 48.
Указанный насос имеет достаточно широкий диапазон изменения рабочего объема в пределах от нуля до максимума. Изменение рабочего объема насоса может происходить как в сторону увеличения, так и в сторону его уменьшения.
Варьирование указанным объемом вызывает соответствующее изменение подачи насосом рабочей жидкости и потребляемого (приводного) момента. При этом потребляемый насосом момент зависит не только от его рабочего объема, но и от соответствующего перепада давления на нем.
Один из двух вышеупомянутых основных распределителей 32, управляющий стреловым оборудованием, выполнен в виде чувствительного к нагрузке электрогидравлического распределительного модуля с пропорциональным управлением, в котором размещенный в его входной клапанной секции 34 автоматический регулятор давления 35 выполнен в виде предохранительного клапана непрямого действия, состоящего из основного и вспомогательного предохранительных клапанов 49, 50.
В этой же секции 34 распределителя 32 установлены клапан разности давлений 51 и соответствующий ограничитель расхода 52.
Клапан разности давлений 51 входной клапанной секции 34 данного распределителя 32 в статике не работает, т.к. имеет несколько большую, примерно на 5 кгс/см2, по отношению к чувствительному к нагрузке блоку 47 насоса 29 настройку. Однако в переходных процессах он может перепускать через себя часть рабочей жидкости, обеспечивая необходимую устойчивость работы заявляемой гидросистемы.
В конструкции его предусмотрен соответствующий регулировочный винт для изменения настройки.
К имеющимся рабочим секциям 53-56 распределителя 32, используемым как и в прототипе для управления исполнительными органами 5-11 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20 и стрелового оборудования, добавлены две дополнительные секции 57, 58, скоммутированные при помощи соответствующих магистралей питания 59-62 с исполнительными органами 12, 13 привода гидрофицированного рабочего инструмента 28.
Указанные рабочие секции 53-58 распределителя 32 идентичны между собой по схемно-конструктивному исполнению и имеют в своем составе клапан разности давлений 63 регулируемого типа и установленный в чувствительном к нагрузке тракте (управляющей магистрали) обратный клапан 64.
Клапаны разности давлений 63 поддерживают необходимые, порядка 8 кгс/см2, перепады давления на напорных окнах запорно-регулирующих золотников 65 рабочих секций 53-58 распределителя 32.
При помощи имеющегося в конструкции каждого из указанных клапанов 63 регулировочного винта можно изменять настройку в достаточно большом, порядка (2-32) кгс/см2, диапазоне и таким образом варьировать расходом пропускаемой через золотники 65 рабочей жидкости.
Помимо этого каждая из рабочих секций 53-58 чувствительного к нагрузке распределителя 32 снабжена автономным электронным блоком, позволяющим в совокупности с системой управления 41 реализовать различные законы перемещения золотников 65 (линейный, степенной, с необходимым замедлением и др.), а также скачкообразное перемещение их из нулевого положения через зону нечувствительности.
Указанные особенности существенно расширяют возможности заявляемой гидросистемы в части оптимизации управления работой ее исполнительных органов. В принципе данные электронные блоки могут быть дезинтегрированы из состава чувствительного к нагрузке распределителя 32 и предусмотрены непосредственно в составе системы управления 41.
Конструкция чувствительного к нагрузке распределителя 32 обеспечивает:
- подачу жидкости в рабочие полости соответствующих исполнительных органов 5-13, а также слив ее из них;
- независимую параллельную работу указанных исполнительных органов 5-13 (до четырех каналов);
- необходимое ограничение давления при форсировании грузоподъемности крано-манипуляторной установки;
- запирание жидкости в рабочих полостях указанных исполнительных органов 5-13.
Расположенные в рабочих секциях 53-58 запорно-регулирующие золотники 65 управляются двумя редукционными клапанами 66, 67 с пропорциональными электромагнитами 68, 69 с обеспечением фиксации их линейного положения индуктивным датчиком, обладающим высокой степенью разрешения (на принципиальной схеме гидросистемы данные датчики условно не показаны).
Сливное отверстие 70 замыкающей крышки 71 указанного распределителя 32 заглушено.
Другой основной распределитель 33 выполнен с аналогичными по конструктивному исполнению входной клапанной секцией 34 и замыкающей крышкой 71. Он так же имеет три рабочие секции 72-74, которые выполнены с электрическими приводами линейного перемещения золотников 75 с двумя релейными электромагнитами 76, 77 прямого действия. Одна из рабочих секций 72 второго основного распределителя 33 сообщена напрямую при помощи соответствующих запараллеленных между собой магистралей питания 78-81 с поршневыми и штоковыми полостями 82-85 гидравлических исполнительных органов 43, 44 перемещения выдвижных балок 45, 46 крепления аутригеров 16, 17.
Данное схемное решение предельно просто в исполнении и позволяет минимизировать количество рабочих секций распределителя, необходимых для управления двумя указанными исполнительными органами, до одной.
Две другие рабочие секции 73, 74 распределителя 33 используются для управления исполнительными органами 3, 4 перемещения лап 14, 15 выносных аутригеров 16, 17.
Конструкция указанного распределителя 33 обеспечивает подачу жидкости в рабочие полости соответствующих исполнительных органов 3, 4 и 43, 44 и слив ее из них, а также необходимое ограничение давления при открытых золотниках 75.
Из-за отсутствия в рабочих секциях 72-74 данного распределителя 33 автономных клапанов разности давлений независимая параллельная работа по нескольким каналам в данном случае проблематична и в принципе может даже оказаться невозможной.
При этом оба основных распределителя 32, 33 подсоединены к напорной магистрали 86 через вспомогательный двухпозиционный электрогидравлический распределитель 87 переключения режимов работы крано-манипуляторной установки 2 с задействования механизма поворота 18 стойки 19 опорно-поворотного устройства 20 и стрелового оборудования с гидрофицированным рабочим инструментом на задействование выносных аутригеров и обратно.
При отсутствии управляющей команды на электромагните 88 пилота 89 вспомогательного распределителя 87 золотник 90 его находится в открытом положении и соединяет выход насоса 29 с первым из основных распределителей 32, а слив - со вторым из основных распределителей 33.
При данной схеме коммутации напорной магистрали 86 насоса 29 с входящими в состав заявляемой гидросистемы основными распределителями 32, 33 одновременная подача рабочей жидкости от него к указанным распределителям невозможна. Благодаря наличию в гидросистеме вспомогательного распределителя 87, служащего в качестве соответствующего блокировочного устройства, она может подаваться к ним только поочередно. Указанная особенность схемного исполнения заявляемой гидросистемы в отличие от прототипа позволяет полностью исключить вероятность возникновения аварийной ситуации по этой причине при работе крано-манипуляторной установки.
При подаче команды на электромагнит 88 слив соединяется с первым, а напор - со вторым из указанных распределителей 32, 33.
Входы размещенных в клапанных секциях 34 основных распределителей 32, 33 ограничителей расхода 52 сообщены посредством управляющих магистралей 48 с чувствительным к нагрузке блоком 47 насоса 29, а выходы - со сливной магистралью 91.
Каждый из распределителей 32, 33, 36, 87 выполнен с возможностью его дистанционного управления путем использования их управляющих электромагнитов 68, 69, 76, 77, 88 и 92 и управления вручную посредством ручного перемещения золотников 65, 75, 90 и 93 при помощи соответствующих рукояток 94 рычажного типа. Это весьма удобно при эксплуатации крано-манипуляторной установки. В частности, при аварийном отказе оборудования она может без особых затруднений переведена из рабочего состояния в транспортное при помощи ручного управления.
На выходе из насоса 29 перед вспомогательным распределителем 87 последовательно установлены обратный клапан 95 с напорным фильтром 96 очистки рабочей жидкости и встроенный в напорную магистраль 86 между указанным фильтром и дополнительным распределителем 36 редукционный клапан 97, сообщенный через двухкромочный золотник 98 чувствительного к нагрузке блока 47 насоса с рабочей полостью привода 99 его регулятора мощности 100.
Наличие обратного клапана 95 позволяет без особых затруднений подключать, при необходимости, к заявляемой гидросистеме соответствующую автономную аварийную насосную станцию.
Установка в напорной магистрали 86 заявляемой гидросистемы рассчитанного на соответствующее давление дополнительного фильтра 96 очистки рабочей жидкости позволяет существенно уменьшить степень загрязненности ее различного рода механическими примесями и на этой основе свести к минимуму износ или вероятность заклинивания прецизионных пар трения в исполнительных органах, насосной, распределительной и клапанной гидравлической аппаратуре.
Схемно редукционный клапан 97 не входит в состав регулируемого аксиально-поршневого насоса 29. Однако функционально он позволяет бесступенчато формировать соответствующее давление подаваемой в рабочую полость привода 99 регулятора мощности 100 насоса 29 жидкости, пропорциональное величине ограничиваемой мощности.
Установленная за вторым основным распределителем 33 в поршневых магистралях 101, 102 питания исполнительных органов 3, 4 перемещения лап 14, 15 аутригеров 16, 17 защитно-предохранительная аппаратура выполнена в виде двух автономных тормозных клапанов 103, 104 навесного типа с заглушенными входами их клапанов "ИЛИ" 105.
Каждый из тормозных клапанов 103, 104 снабжен управляемыми при помощи подаваемой в штоковые полости 106, 107 указанных органов 3, 4 рабочей жидкости нормально закрытыми запорными элементами 108, настроенными на восприятие лапами 14, 15 аутригеров 16, 17 максимально допустимых по условиям эксплуатации значений величин действующих на них рабочих усилий и автоматически открывающимися при их превышении.
Встроенная в магистрали питания 109-112 и 59-62 исполнительных органов 5 и 8-13 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20, телескопических выдвижных секций 23-26 стрелы 27 и гидрофицированного рабочего инструмента 28 защитно-предохранительная аппаратура выполнена в виде обратно-предохранительных клапанов 113-120, сгруппированных в размещенный за первым основным распределителем 32 обособленный клапанный блок 121 секционного типа.
Данная аппаратура предназначена для защиты перечисленных исполнительных органов от перегрузки посредством соответствующего ограничения давлений в их рабочих полостях и автоматической подпитки указанных полостей жидкостью для исключения возникновения разрежения в них при резком изменении скоростей движения.
Реализованное в составе указанного фрагмента заявляемой гидросистемы схемно-компоновочное техническое решение позволяет использовать для его формирования серийно производимую специализированными предприятиями, а значит и достаточно хорошо отработанную и надежную аппаратуру в модульном исполнении и на этой основе улучшить качественные показатели гидропривода.
Установленная в поршневых и штоковых магистралях питания 122-125 исполнительных органов 6, 7 привода подъемной и выносной секций 21, 22 стрелы 27 защитно-предохранительная и регулирующая аппаратура выполнена в виде двух автономных блоков 126, 127. Каждый из указанных блоков 126, 127 сформирован из двух предохранительных клапанов 128, 129, гидрозамка 130, клапана разности давлений 131, подпорного и двух обратных клапанов 132-134.
При этом гидрозамок 130, клапан разности давлений 131 и один из предохранительных клапанов 128 последовательно встроены в поршневую магистраль 122 (124) с сообщением выходов предохранительного клапана и клапана разности давлений со сливом, а управляющей полости гидрозамка - со штоковой магистралью 123 (125).
Подпорный и второй из предохранительных клапаны 132, 129 последовательно встроены в штоковую магистраль 123 (125) с сообщением выхода последнего из них со сливом.
Один из обратных клапанов 133 установлен в поршневой магистрали 122 (124) в обход гидрозамка 130 и клапана разности давлений 131, а другой обратный клапан 134 - в штоковой магистрали 123 (125) в обход подпорного клапана 132.
Данные блоки защиты обеспечивают необходимую плавность (стабильность скоростей) движений, выполняемых соответствующими исполнительньми органами, надежную защиту указанных органов от перегрузки, посредством ограничения давлений в их рабочих полостях, автоматический подпор рабочей жидкости и управление входящими в их состав гидрозамками.
Как уже отмечалось выше, заявленная гидросистема содержит автономные силовые гидроцилиндры 8 и 11 двойного действия с односторонними полыми штоками 143, за исключением замыкающего, являющиеся гидравлическими исполнительными органами привода всех выдвижных телескопических секций 23-26 стрелы 27.
Поршневые, а также штоковые полости 135-142 исполнительных органов 8-11 привода телескопических выдвижных секций 23-26 стрелы 27 последовательно сообщены между собой напроход посредством соответствующих проложенных через их штоки 143 внутренних, герметизированных друг от друга трактов 144-149 и внешних соединительных гидравлических магистралей 150-155 для обеспечения прохода рабочей жидкости в них (указанные полости) и обратно.
Такое схемно-конструктивное решение позволяет оптимизировать пространственную прокладку магистралей питания указанных исполнительных органов и минимизировать их протяженность посредством исключения необходимости формирования в данной зоне с обеспечением провисания соответствующих компенсационных вставок и на этой основе значительно улучшить весовое совершенство, внешний облик, удобство обслуживания грузоподъемной стрелы, а также повысить безопасность работ.
При этом в каждую из внешних штоковых магистралей 151, 153, 155 встроены обратно-предохранительные клапаны 156-158, предохранительные клапаны 159-161 которых настроены с учетом соответствующих сил трения в подвижных соединениях телескопических секций 23-26 стрелы 27 на одинаковый перепад давления такой величины, чтобы суммарное сопротивление перемещению первой выдвижной секции 23 было бы минимальным, а далее возрастало до максимального значения при перемещении замыкающей секции 26.
Поршни 162 и штоки 143 исполнительных органов 8-11 привода всех выдвижных телескопических секций 23-26 стрелы 27 имеют одинаковые диаметры, а их внутренние тракты 144-149 и внешние гидравлические магистрали 150-155, последовательно сообщающие рабочие полости 135-142 указанных органов, - равные проходные сечения.
Указанные особенности схемно-компоновочного исполнения данного фрагмента заявляемой гидросистемы обусловлены необходимостью гарантированного обеспечения соответствующей последовательности выдвижения и втягивания телескопических секций стрелы при одновременной подаче рабочей жидкости в поршневые либо штоковые полости исполнительных органов их привода.
Под действием внешних нагрузок грузоподъемная стрела, а следовательно, и выдвигаемые в крайнее положение ее телескопические секции, испытывают сложное напряженное состояние. При этом из всех видов напряжения превалирующим является изгиб, действующий в вертикальной плоскости. С учетом этого в силовом плане выдвигаемая в крайнее положение телескопическая часть стрелы представляет собой, с достаточной степенью приближения, защемленную одним концом в выносной секции консольную балку, нагруженную вертикальной сосредоточенной силой F (см. фиг.26), приложенной к ее другому, свободному концу.
Как видно из приведенной на указанной фигуре верхней эпюры, обусловленный действием нагружающей силы изгибающий момент в точке А ее приложения равен нулю и линейно возрастает по абсолютной величине до максимального значения в точке Б защемления консольной балки.
Материал и геометрические размеры поперечных сечений всех выдвижных телескопических секций стрелы обычно выбирают с учетом фактического изменения по ее длине изгибающего момента, обусловленного действием соответствующей эксплуатационной нагрузки, и обеспечения, примерно, равной способности сопротивления их конструкции указанному силовому воздействию.
Указанный подход позволяет минимизировать соответствующим образом габариты и массу конструкции рассматриваемой части грузоподъемной стрелы. Однако он может быть реализован только при гарантированном обеспечении необходимой последовательности выдвижения и втягивания телескопических секций стрелы,
При увеличении вылета стрелы сначала должна выдвигаться ее первая телескопическая секция, а за ней последовательно вторая, третья и замыкающая телескопические секции.
Втягивание и выдвижение телескопических секций стрелы при уменьшении ее вылета должно осуществляться в обратном порядке, начиная с замыкающей. Если по каким-либо причинам данная очередность выдвижения либо втягивания указанных секций стрелы будет нарушена, то действующие на ряд из них эксплуатационные нагрузки могут значительно превысить их несущую способность (см. приведенную на фиг.26 нижнюю эпюру), что неизбежно повлечет за собой поломку телескопической части стрелы.
Способ решения данной задачи подробно рассмотрен ниже по тексту.
Двухконтурный ограничитель грузоподъемности 37 снабжен вторым разобщенным с первым автоматическим регулятором давления 163. Указанный регулятор давления 163 выполнен в виде установленного в напорной магистрали 86 между дополнительным распределителем 36 и сливным фильтром 31 очистки рабочей жидкости автономного предохранительного клапана, настроенного на околопредельную в сторону уменьшения по сравнению с первым регулятором 35 величину предельного давления, эквивалентную максимально допустимому значению грузоподъемности для нормального режима работы крано-манипуляторной установки 2.
Входящий в состав электронного устройства безопасности 38 двухконтурного ограничителя грузоподъемности 37 измеритель давления 39 жидкости в поршневой полости 40 исполнительного органа 6 привода подъемной секции 21 стрелы 27 выполнен в виде интегрированного в блок защиты 126 указанного исполнительного органа датчика давления аналогового типа, электрически соединенного посредством соответствующего кабеля 164 с системой управления 41.
Такой же измеритель 39 для контроля давления рабочей жидкости в поршневой полости 165 исполнительного органа 7 привода выносной секции 22 стрелы 27 входит в состав встроенного в магистрали питания 124, 125 данного исполнительного органа другого блока защиты 127 с идентичным подсоединением его к указанной полости и системе управления 41.
Данное схемное решение, предусматривающее формирование электронного устройства безопасности двухконтурного ограничителя грузоподъемности на основе двух интегрированных в соответствующие блоки защиты исполнительных органов привода подъемной и выносной секций стрелы измерителей давления рабочей жидкости в их поршневых полостях, предпочтительнее реализованного в прототипе, поскольку при определенной конфигурации пространственного положения звеньев стрелы предельная грузоподъемность может быть превышена как по линии подъемной, так и по линии ее выносной секций.
Используемые в составе указанного устройства безопасности в качестве соответствующих электронных измерителей датчики давления аналогового типа обладают большей чувствительностью по сравнению с решающим ту же самую задачу в прототипе реле давления, а также автоматическими регуляторами давления другого контура ограничителя грузоподъемности.
В совокупности с реализованной в заявляемой гидросистеме системой управления они в данном случае позволяют кардинальным образом разрешить проблему текущего отображения соответствующей информации, характеризующей работу крано-манипуляторной установки, и оперативного оповещения машиниста о приближении и возникновении критического состояния машины, обусловленного превышением ее грузоподъемности.
Благодаря более высокой чувствительности указанное устройство безопасности 38 при превышении грузоподъемности крано-манипуляторной установки 2 всегда будет блокировать соответствующие действия оператора несколько раньше срабатывания другого чисто гидравлического защитно-предохранительного контура 163 (35) ограничителя грузоподъемности 37.
При этом в случае выхода из строя одного из указанных контуров ограничителя грузоподъемности соответствующая защита крано-манипуляторной установки от опрокидывания осуществляется его другим контуром. Такое дублирование повышает безопасность работы машины.
В настоящее время различными специализированными фирмами производится достаточно большое количество автономных ограничителей грузоподъемности в навесном блочном исполнении, предназначенных, в основном, для соответствующего оснащения грузоподъемных кранов.
Большинство из них сложны в схемно-конструктивном исполнении, имеют достаточно большие габариты, массу и высокую стоимость, что в значительной мере сдерживает использование их в крано-манипуляторных установках.
Использованный в составе заявляемой гидросистемы ограничитель грузоподъемности органически встроен непосредственно в ее электрогидравлическую часть и по основным своим техническим параметрам значительно превосходит известные образцы.
Такая схемно-компоновочная и конструктивная перестройка заявляемой гидросистемы, по сравнению с прототипом, обусловлена необходимостью придания ей сугубо специфичного нового качества, а именно способности соответствующего форсирования, при необходимости, грузоподъемности крано-манипуляторной установки.
Выполнение двухконтурного ограничителя грузоподъемности с двумя пространственно разобщенными между собой и имеющими различную настройку автоматическими регуляторами давления позволяет в данном случае сформировать в ней, в отличие от прототипа, на базе функционально объединенных друг с другом в особую группу предохранительного клапана 35 непрямого действия клапанной секции 34 основного распределителя 32, управляющего исполнительными органами 5-13 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20, стрелового оборудования 21-26, гидрофицированного инструмента 28 и дополнительного электрогидравлического распределителя 36 в совокупности с системой управления 41 систему форсирования грузоподъемности 166, предусматривающую в этом случае преднамеренное разобщение при помощи включаемого по соответствующей команде системы управления дополнительного распределителя выхода насоса 29 с установленным в напорной магистрали 86 первичным предохранительным клапаном 163 и необходимое повышение в данных исполнительных органах давления рабочей жидкости с одновременным пропорциональным снижением их быстродействия путем соответствующего трансформирования по заданной наперед программе подаваемых на электромагниты 68, 69 рабочих секций 53-58 управляющего ими распределителя командных токов, обеспечивающих соответствующее замедление перемещений запорно-регулирующих золотников 65 указанных секций.
Необходимое повышение давления в указанных исполнительных органах обеспечивается соответствующей настройкой размещенного в клапанной секции 34 управляющего ими основного распределителя 32 предохранительного клапана 35 непрямого действия.
Одновременно реализуемое при этом пропорциональное снижение быстродействия исполнительных органов позволяет значительно уменьшить действующие на машину динамические нагрузки.
Указанное решение существенно расширяет соответствующие технические возможности машины, что имеет исключительное значение в различного рода экстремальных ситуациях. У прототипа вследствие особенностей его конструктивного исполнения такой возможности нет.
Стационарно закрепляемые на неподвижной части опорно-поворотного устройства 20, которой является его основание 167, фрагменты гидравлических соединительных магистралей 48, 86, 91, 168 и кабелей 164 системы управления 41 сопряжены с соответствующими размещаемыми на подвижной части указанного устройства, которой является его стойка 19, и перемещающимися совместно с ней в окружном направлении их ответными фрагментами при помощи устанавливаемого при сборке крано-манипуляторной установки 2 во внутреннюю полость стойки съемного многоканального электрогидравлического коммуникационного соединителя 169 поворотного типа.
В магистрали питания 59-62 каждого из исполнительных органов 12, 13 привода гидрофицированного рабочего инструмента 28 на участке телескопирования стрелы 27 встроен двухканальный гидравлический поворотный соединитель 170 с натяжным барабаном 171 для намотки подсоединяемых к нему гибких шлангов 172 соответствующих компенсационных вставок 173-176 указанных магистралей.
Свободные концы шлангов 172 компенсационных вставок 173-176 снабжены присоединителями 177, выполненными в виде жестко закрепляемых на консольной части замыкающей выдвижной телескопической секции 26 стрелы 27 отжимных клапанов с замковыми механизмами фиксации 178 шарикового типа пристыковываемых к ним съемных ответных концевых присоединителей 179 исполнительных органов 12, 13 указанного инструмента 28.
Бак 30 снабжен встроенными в него электронными датчиками 180, 181 уровня и температуры рабочей жидкости.
Наличие таких датчиков существенно упрощает процедуру контроля соответствующих параметров рабочей жидкости.
В сливном и напорном фильтрах 31, 96 очистки рабочей жидкости установлены съемные фильтроэлементы 182 с индикаторами 183 их засоренности электронного типа и предохранительно-перепускные клапаны 184.
При соответствующей загрязненности фильтроэлементов, а также эксплуатации на режимах, отличающихся от номинальных (повышенный расход и вязкость рабочей жидкости при пуске машины), перепады давления на фильтроэлементах значительно возрастают, что может в конечном счете привести к их повреждению.
Соответствующая пропускная способность фильтроэлементов, а также наличие в конструкции данных фильтров настроенных определенным образом предохранительно-перепускных клапанов позволяют избежать этого.
Необходимость своевременной замены засорившихся фильтроэлементов определяется оператором по соответствующим сигналам вышеуказанных электронных индикаторов.
Система управления 41 заявляемой гидросистемы содержит размещаемые на опорно-поворотном устройстве 20 приемно-командные электронные модули 185 и дистанционный пульт управления 186, построенные на микропроцессорной основе.
Дистанционный пульт управления 186 указанной системы 41 снабжен кнопкой 187 подачи предупредительных звуковых сигналов, двухпозиционной кнопкой 188 переключения режимов работы крано-манипуляторной установки “Стойка, стрела - аутригеры”, переключателем 189 задействования системы форсирования грузоподъемности 166, клавишами управления 190-195 исполнительными органами 3-13 и 43, 44 привода механизма поворота 8 стойки 19, соответствующих секций 21-26 стрелы 27, подвешиваемого на ней гидрофицированного рабочего инструмента 28 и перемещения выдвижных балок 45, 46 и лап 14, 15 выносных аутригеров 16, 17, кнопкой 196 аварийного останова, резервными переключателями 197, жидкостно-кристаллическим дисплеем 198 для отражения визуальной информации о температуре окружающей среды и рабочей жидкости в баке 30, текущем режиме работы, отработанных моточасах, степени засоренности фильтров 31, 96 очистки рабочей жидкости с указанием засоренного фильтра, падении уровня жидкости в баке ниже допустимой нормы, достижении соответствующей величины грузоподъемного момента в основном режиме работы и режиме форсирования грузоподъемности, световым сигнальным индикатором 199 красного цвета и зуммером для подачи звуковых сигналов для привлечения, в необходимых случаях, внимания оператора.
Блокировка действий оператора, направленных на продолжение работы в критических ситуациях, осуществляется системой управления при достижении 110% грузоподъемности крано-манипуляторной установки и имеет только односторонний характер. Начиная с этого момента, оператор не может выполнить в обход данного запрета ни одной операции, способствующей дальнейшему ухудшению состояния машины. Система управления в такой ситуации дает разрешение ему на выполнение только тех операций, которые способствуют выведению машины из возникшего критического положения.
В системе управления 41 для позиционирования золотников 65 рабочих секций 53-58 чувствительного к нагрузке распределителя 32 использован принцип модуляции ширины подаваемого на их электромагниты 68, 69 управляющего импульса. При этом положение золотника 65 в каждой из указанных секций 53-59 фиксируется с высокой степенью разрешения соответствующим датчиком индуктивного типа, выходной сигнал которого регистрируется и сопоставляется с задаваемым управляющим сигналом электроникой системы управления 41, которая при рассогласовании указанных сигналов автоматически модулирует его в соответствующий командный ток, управляющий электромагнитами 68, 69 таким образом, что соответствующее давление рабочей жидкости перемещает этот золотник пропорционально указанному току в нужное положение, после чего дальнейшая модуляция прекращается, и золотник запирается в данной позиции.
Указанные особенности исполнения заявляемой гидросистемы обеспечивают высокую точность позиционирования стойки опорно-поворотного устройства и стрелы крано-манипуляторной установки с подвешиваемым на ней гидрофицированным рабочим инструментом, что чрезвычайно важно при проведении строительно-монтажных и ряда других работ, а также перемещении особо опасных грузов.
При недостаточном уровне внешнего освещения включается предусмотренная в составе пульта управления 186 системы 41 соответствующая местная подсветка рабочей зоны оператора.
Реализованное в заявляемой гидросистеме дистанционное управление крано-манипуляторной установкой чрезвычайно эффективно при погрузке материалов в высокобортовые транспортные средства, например железнодорожные вагоны, и выгрузке их из них, а также на различного рода строительно-монтажных и других работах, проводимых в условиях ограниченной видимости зоны захвата груза либо разгрузки и монтажа, особенно при большой длине грузоподъемной стрелы. Нет ему надлежащей альтернативы и в ряде других, сугубо специфичных случаев, например при проведении работ с взрывоопасными материалами или объектами, когда оператор крано-манипуляторной установки по условиям безопасности должен находиться на достаточно большом удалении от места проведения работ в специальном укрытии.
В системе управления заявляемой гидросистемы предусмотрена возможность самотестирования ее перед началом работы. Указанная операция производится достаточно быстро, в течение нескольких секунд, с соответствующим уведомлением машиниста о готовности оборудования к работе либо имеющихся неисправностях.
При необходимости, данная система достаточно легко может быть соответствующим образом оптимизирована, например в части обеспечения регистрации и сохранности текущей информации, в том числе о действиях оператора, отклонениях в работе машины и др., а также считывания ее для последующей обработки и анализа.
Для этого в ней зарезервированы соответствующие схемно-конструктивные решения, в том числе и по объему памяти, а также возможностям программирования. В целом она построена на отвечающих современному уровню элементной базе и соответствующих технических решениях, позволяющих существенным образом повысить производительность и безопасность работы рассматриваемого оборудования, а также значительно улучшить удобство его обслуживания.
Все движения крано-манипуляторной установки выполняются гидравлическими исполнительными органами 3-13 и 43, 44 ее гидросистемы 1. При этом привод насоса 29 заявляемой гидросистемы 1 осуществляется от двигателя транспортного средства через коробку отбора мощности (при монтаже крано-манипуляторной установки на шасси указанного средства) или от специального приводного вала (при ее стационарном размещении).
Вынос аутригеров 16, 17 и установка машины на опорные пяты 200 их лап 14, 15 осуществляются посредством соответствующих перемещений выдвижных балок 45, 46 крепления указанных аутригеров и лап при работающем насосе 29 гидросистемы 1.
Для этого сначала подстыковывают дистанционный пульт управления 186 к бортовой кабельной сети системы управления 41 крано-манипуляторной установки 2, расфиксируют выдвижные балки 45, 46 крепления выносных аутригеров 16, 17 и соответствующим нажатием двухпозиционной кнопки 188 на пульте с принудительным удержанием ее в этой позиции включают режим работы “Аутригеры”.
При нажатии указанной кнопки 188 включается электромагнит 88 пилота 89 вспомогательного распределителя 87 и соответствующим перемещением его золотника 90 напорная магистраль 86 насоса 29 отсекается от чувствительного к нагрузке основного распределителя 32, управляющего движениями механизма поворота 18 стойки 19 опорно-поворотного устройства 20, стрелового оборудования и рабочего инструмента 28 и сообщается с другим не чувствительным к нагрузке основным распределителем 33, управляющим движениями выносных аутригеров 16, 17. В результате первый из указанных основной распределитель 32 оказывается заблокированным и его работа становится невозможной, а второй основной распределитель 33 готов к работе.
При работающем насосе 29 жидкость от него подается в клапанную секцию 34 второго основного распределителя 33 и далее к золотникам 75 его рабочих секций 72-74.
При отсутствии управляющих сигналов на электромагнитах 76, 77 рабочих секций 72-74 указанного распределителя 33 их золотники 75 находятся в нейтральном (нулевом) положении. Поскольку в этом случае управляющая магистраль 48 соединена со сливной магистралью 91 и фактически нет потребления рабочей жидкости исполнительными органами 43, 44, 3, 4 перемещения выдвижных балок 45, 46 и лап 14, 15 выносных аутригеров 16, 17, то соответственно давление в надклапанной полости системного клапана разности давлений 51 данного основного распределителя 33 близко к нулю (Рmах=Рсл) и насос 29 разгружается по расходу, переходя практически на нулевой рабочий объем. По давлению насос 29 разгружается, примерно, до 20 кгс/см2, т.к. на чувствительный к нагрузке блок (регулятор) 47 его из управляющей магистрали 48 подается давление, близкое к нулю (Рсл).
Для выноса аутригеров 16, 17 посредством соответствующего перемещения клавиши 191 дистанционного пульта управления 186 подают командный ток на левый (по схеме) электромагнит 76 рабочей секции 72 второго основного распределителя 33, управляющего исполнительными органами 43, 44 перемещения выдвижных балок 45, 46. При этом золотник 75 указанной рабочей секции 72 перемещается влево и соединяет по дифференциальной схеме через соответствующие дросселирующие каналы в его теле и магистрали питания 78-81 напорную магистраль 86 насоса 29 с поршневыми и штоковыми полостями 82-85 обоих исполнительных органов 43, 44 перемещения выдвижных балок 45, 46.
Поступающая в указанные полости 82-85 исполнительных органов 43, 44 рабочая жидкость подводится одновременно к обоим торцам их поршней. Однако вследствие имеющей место разности рабочих площадей указанных торцов со стороны расположения поршневых полостей 78, 79 на них будут действовать гораздо большие осевые усилия, нежели со стороны штоковых полостей 80, 81.
По этой причине будет происходить выдвижение штоков обоих исполнительных органов 43, 44, а следовательно, и соответствующие перемещения в поперечных направлениях (вынос) шарнирно сочлененных с ними выдвижных балок 45, 46 крепления аутригеров 16, 17. Вытесняемая из штоковых полостей 80, 81 исполнительных органов 43, 44 рабочая жидкость перепускается через соответствующие каналы в теле золотника 75 в поршневые полости 78, 79 указанных органов. В конце хода выдвижные балки 45, 46 стопорятся при помощи механических фиксаторов штыревого типа.
После выполнения данной операции клавишу 191 пульта 186 отпускают, и она автоматически переводится в нейтральное (нулевое) положение. При этом с электромагнита 76 рабочей секции 72 основного распределителя 33 снимается командный ток и ее золотник 75 также возвращается в исходное (нулевое) положение, разъединяя напорную магистраль 86 насоса 29 с поршневыми и штоковыми полостями 82-85 исполнительных органов 43, 44 перемещения выдвижных балок 45, 46 крепления аутригеров 16, 17 и сообщая их со сливной магистралью 91.
Для втягивания выдвижных балок 45, 46 крепления выносных аутригеров 16, 17, например при переводе крано-манипуляторной установки 2 в транспортное положение, сначала их расфиксируют, а затем перемещают клавишу 191 дистанционного пульта управления 186 в противоположную сторону после ее останова.
При указанном перемещении клавиши 191 подается командный ток на правый электромагнит 77 рабочей секции 72 основного распределителя 33, управляющего исполнительными органами 43, 44 привода выдвижных балок 45, 46. При этом золотник 75 указанной рабочей секции 72 перемещается вправо и соединяет напрямую через соответствующие дросселирующие каналы в его теле и магистрали питания 78-81 напорную магистраль 86 насоса 29 со штоковыми полостями 84, 85 обоих исполнительных органов 43, 44 перемещения выдвижных балок 45, 46, а поршневые полости 82, 83 - со сливной магистралью 91.
Под действием давления подаваемой в штоковые полости 84, 85 указанных исполнительных органов 43, 44 рабочей жидкости происходит втягивание их штоков, а следовательно, и перемещение в исходное положение кинематически связанных с ними выдвижных балок 45, 46 крепления выносных аутригеров 16, 17. При втягивании выдвижных балок 45, 46 рабочая жидкость из поршневых полостей 82, 83 исполнительных органов 43, 44 вытесняется в сливную магистраль 91.
После выноса аутригеров 16, 17, пользуясь соответствующими клавишами 190, 192 дистанционного пульта управления 186, переводят их лапы 14, 15 в рабочее положение, обеспечивая необходимую устойчивость машины против опрокидывания.
Указанная операция заключается собственно в соответствующем опускании лап 14, 15 выносных аутригеров 16, 17 до упора их опорными пятами 200 в грунт.
При подаче посредством соответствующих перемещений клавиш 190, 192 пульта 186 командных сигналов на левые электромагниты 76 рабочих секций 73, 74 основного распределителя 33, управляющего исполнительньми органами 3, 4 перемещения лап 14, 15 выносных аутригеров 16, 17, золотники 75 указанных секций переводятся из положения равновесия влево и соединяют по дифференциальной схеме через соответствующие дросселирующие каналы в их телах магистрали питания 101, 102, 201, 202 и встроенные в них тормозные клапаны 103, 104, напорную магистраль 86 насоса 29 с поршневыми и штоковыми полостями 203, 204, 106,107 вышеупомянутых исполнительных органов.
По магистралям питания 201, 202 и 101, 102, соответственно напрямую и через открываемые потоками рабочей жидкости обратные клапаны 205 тормозных клапанов 103, 104, минуя их запорные элементы 108, указанная жидкость одновременно подводится к обоим торцам каждого из поршней исполнительных органов 3, 4.
При этом, как и в исполнительных органах 43, 44 перемещения выдвижных балок 45, 46 выносных аутригеров 16, 17 вследствие точно таких же причин, будет происходить выдвижение штоков (лап 14, 15) обоих исполнительных органов 3, 4, а следовательно, и опускание шарнирно скрепленных с ними самоустанавливающихся опорных пят 200.
После установки машины на опорные пяты 200 лап 14, 15 выносных аутригеров 16, 17 крано-манипуляторной установки 2 клавиши 190, 192 дистанционного пульта управления 186 отпускают и они автоматически переводятся в нейтральное (нулевое) положение. При этом с электромагнитов 76 рабочих секций 73, 74 основного распределителя 33 снимается управляющее напряжение (командный ток) и их золотники 75 также возвращаются в исходное (нулевое) положение, разъединяя напорную магистраль 86 насоса 29 с поршневыми и штоковыми полостями 203, 204, 106, 107 исполнительных органов 3, 4 перемещения лап 14, 15 выносных аутригеров 16, 17 и сообщая их со сливной магистралью 91.
При такой коммутации золотников 75 рабочих секций 73, 74 несанкционированная просадка лап 14, 15 выносных аутригеров 16, 17 исключается запиранием жидкости в поршневых полостях 203, 204 исполнительных органов 3, 4 их перемещения обратными клапанами 205 и нормально закрытыми запорными элементами 108 тормозных клапанов 103, 104.
Опускание лап 14, 15 выносных аутригеров 16, 17 может осуществляться как одновременно, так и поочередно.
При нахождении золотников 75 рабочих секций 73, 74 основного распределителя 33 в нейтральных (нулевых) положениях тормозные клапаны 103, 104 выполняют функцию гидрозамков, предотвращающих несанкционированную просадку лап 14, 15 выносных аутригеров.
Для подъема лап 14, 15 выносных аутригеров 16, 17, например при переводе крано-манипуляторной установки 2 в транспортное положение, необходимо переместить клавиши 190, 192 дистанционного пульта управления 186 в противоположную сторону после ее останова.
При указанном перемещении клавиш 190, 192 подаются соответствующие командные токи на правые электромагниты 77 рабочих секций 73, 74 основного распределителя 33, управляющего исполнительными органами 3, 4 привода лап 14, 15 выносных аутригеров 16, 17. При этом золотники 75 указанных рабочих секций 73, 74 перемещаются вправо и соединяют напрямую через соответствующие дросселирующие каналы в их телах и магистрали питания 201, 202, 101, 102 напорную магистраль 86 насоса 29 со штоковыми полостями 106, 107, а поршневые полости 203, 204 - со сливной магистралью 91.
Под действием давления подаваемой в штоковые полости 106, 107 указанных исполнительных органов 3, 4 рабочей жидкости открываются запорные элементы 108 тормозных клапанов 103, 104 и происходит втягивание штоков (лап 14, 15 выносных аутригеров 16, 17), а следовательно, и подъем в исходное положение кинематически связанных с ними опорных пят 200. При втягивании лап 14, 15 рабочая жидкость из поршневых полостей 203, 204 исполнительных органов 3, 4 вытесняется в сливную магистраль 91.
Тормозные клапаны 103, 104 обеспечивают при этом достаточно высокую стабильность скорости втягивания лап 14, 15 выносных аутригеров 16, 17, когда действуют попутные нагрузки, с исключением автоколебаний.
Перемещение в процессе выполнения погрузочно-разгрузочных и других работ расположенной на стойке 19 стрелы 27 крано-манипуляторной установки 2 в окружном направлении осуществляется посредством соответствующего поворота стойки в подшипниках 206, 207 основания 167 опорно-поворотного устройства 20.
Для обеспечения возможности задействования соответствующего исполнительного органа - гидромотора 5 привода механизма поворота 18 стойки 19 крано-манипуляторную установку 2 переводят из режима работы “Аутригеры” в режим работы “Стойка, стрела, инструмент”.
Для выполнения указанной операции достаточно отпустить нажатую ранее и удерживаемую в этой позиции двухпозиционную кнопку 188, расположенную на лицевой панели дистанционного пульта управления 186.
При отпускании кнопки 188 автоматически выключается электромагнит 88 пилота 89 вспомогательного распределителя 87 и его золотник 90 возвращается в исходное положение, отсекая напорную магистраль 86 насоса 29 от основного распределителя 33, управляющего движениями выносных аутригеров 16, 17, и сообщая ее с другим основным распределителем 32, управляющим движениями механизма поворота 18 стойки 19 опорно-поворотного устройства 20, стрелового оборудования и гидрофицированного рабочего инструмента 28. В результате первый из указанных основных распределителей 33 оказывается заблокированным и его работа становится невозможной, а второй основной распределитель 32 - готовым к работе.
При работающем насосе 29 жидкость от него подается в клапанную секцию 34 основного распределителя 32 и далее - к золотникам 65 его рабочих секций 53-58.
При отсутствии управляющих сигналов на электромагнитах 68, 69 рабочих секций 53-58 указанного основного распределителя 32 их главные золотники 65 находятся в нейтральном (нулевом) положении. Поскольку в этом случае управляющая магистраль 48 соединена со сливной магистралью 91 и фактически нет потребления рабочей жидкости исполнительными органами 5-13 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20 подъемной, выносной и телескопических секций 21-26 стрелы 27 и подвешиваемого на ней гидрофицированного рабочего инструмента 28, то соответственно давление в надклапанной полости клапана разности давлений 51 данного основного распределителя 32 близко к нулю (Рmах=Рсл) и насос 29 разгружается по расходу и давлению точно также, как и при работе выносных аутригеров 16, 17.
Подача управляющего сигнала на необходимый (левый) электромагнит 68 рабочей секции 56 основного распределителя 32 управления гидромотором 5 осуществляется посредством соответствующего перемещения предусмотренной для этого в дистанционном пульте управления 186 клавиши 190.
При наличии управляющего сигнала на электромагните 68 редукционный клапан 66 рабочей секции 56 основного распределителя 32 перемещает золотник 65 вправо (по схеме). При этом одна из рабочих полостей 208 гидромотора 5 соединяется через соответствующий канал в теле золотника 65 указанной секции 56 и ее клапан разности давлений 63 с напорной магистралью 86 насоса 29, а другая полость 209 - напрямую со сливной магистралью 91.
Под действием поступающей в рабочую полость 208 гидромотора 5 жидкости его блок цилиндров, а следовательно, и кинематически связанный с ним выходной вал 210 приходит во вращение, частота которого пропорциональна расходу подаваемой жидкости. От выходного вала 210 гидромотора 5 вращение передается через зубчатый редуктор 211 планетарного типа на приводную шестерню 212 располагаемой снаружи стойки 19 открытой зубчатой передачи 213 механизма поворота 18 стойки 19.
Поскольку конструктивно гидромотор 5 с редуктором 211 и указанной шестерней 212 жестко скреплены со стойкой 19, а кинематически сцепленное с шестерней зубчатое колесо 214 зубчатой передачи 213 механизма 18 ее поворота неподвижно (скреплено с основанием 167 опорно-поворотного устройства 20), то вращающаяся шестерня, обкатываясь по нему, приводит во вращение стойку с закрепленной на ней стрелой 27.
Указанное схемно-конструктивное исполнение механизма поворота 18 стойки 19 опорно-поворотного устройства 20 на основе расположенной снаружи открытой зубчатой передачи 213 и зубчатого планетарного редуктора 211 с приводом от гидромотора 5 обеспечивает возможность передачи больших мощностей с реализацией неограниченного угла поворота стойки.
Вследствие специфики заложенных в конструкцию данного механизма поворота стойки технических решений он отличается от прототипа компактностью, более высокими весовым совершенством, КПД, жесткостью, точностью, долговечностью, удобством монтажа и демонтажа, а также обслуживания. Для изготовления его нет необходимости в высококачественных бронзах и дорогостоящем режущем инструменте.
При повороте стойки 19 ее водило 215, кинематически сцепленное с поводком 216 гильзы 217 многоканального электрогидравлического коммуникационного соединителя 169, синхронно поворачивает последнюю и жестко связанный с ней кожухом 218 выходной хвостовик 219 центрального вала 220 скользящего токосъемника 221 вокруг продольной оси. Одновременно с центральным валом 220 токосъемника 221 вращаются кинематически сцепленные с ним поворотные электроконтакты 222, скользящие по неподвижным электроконтактам 223 токосъемного модуля 224, обеспечивая соответствующее соединение располагаемых на неподвижном основании 167 и поворотной стойке 19 опорно-поворотного устройства 20 кабелей 164.
Подвод рабочей жидкости и передача электрических сигналов с основания 167 на поворотную стойку 19 опорно-поворотного устройства 20 и прохождение их в обратном направлении осуществляются по соответствующим коммуникационным каналам токоизолированных друг от друга гидравлической и электрической частей соединителя 169.
Заложенные в конструкцию указанного соединителя технические решения обеспечивают неразрывность потоков рабочей жидкости при протекании ее по гидравлическим трактам и надежную передачу электрических сигналов через скользящий токосъемник. Коммуникационный соединитель такого конструктивного исполнения обладает относительно небольшими габаритами, высоким весовым совершенством, удобством в эксплуатации и позволяет реализовать бесконечный угол поворота стойки.
При этом он позволяет полностью исключить провисание сопрягаемых между собой в указанной зоне фрагментов гидравлических соединительных магистралей и кабелей системы управления и вероятность задевания их за металлоконструкцию машины или перемещаемый груз, а также травмирование обслуживающего персонала. Помимо этого данное техническое решение в значительной мере способствует улучшению внешнего облика машины.
При закрытом предохранительном клапане 225 обратно-предохранительного клапана 115 весь расход жидкости с выхода напорной щели золотника 65 рабочей секции 56 основного распределителя 32 поступает в напорную полость 208 гидромотора 5. Этому расходу жидкости соответствует определенная скорость вращения его выходного вала 210, а следовательно, и стойки 19.
При вращении гидромотора 5 рабочая жидкость из его противоположной (другой) полости 209 через золотник 65 рабочей секции 56 основного распределителя 32 и сливной фильтр 31 сбрасывается в бак 30.
Останавливают стойку 19 выключением гидромотора 5 ее механизма поворота 19. Останов стойки 19 осуществляют посредством “отпускания” клавиши 190 дистанционного пульта управления 186. При этом она автоматически возвращается в нейтральное (нулевое) положение, с электромагнита 68 пилота основного распределителя 32 снимается управляющий сигнал, и золотник 65 рабочей секции 56 возвращается в исходное (равновесное) положение, полностью перекрывая напорное окно (дросселирующую щель) питания гидромотора 5 рабочей жидкостью.
При разгоне, а также резком торможении стойки 19 опорно-поворотного устройства 20, например при встрече стрелы 27 с препятствием, давление рабочей жидкости в рабочей полости 208 гидромотора 5 может превысить предельную величину настройки предохранительного клапана 225 обратно-предохранительного клапана 115. При срабатывании указанного предохранительного клапана 225 часть рабочей жидкости из указанной полости 208 сливается через него и сливной фильтр 31 в бак 30. При этом скорость вращения вала 210 гидромотора 5 соответственно уменьшается и может упасть вплоть до нуля.
Предохранительный клапан 225 обратно-предохранительного клапана 115 в данном случае обеспечивает соответствующую защиту механизма поворота 18 стойки 19 от сверхдопустимых перегрузок, которые могут реализоваться как при открытом, так и при закрытом золотнике 65 посредством соответствующего перепускания рабочей жидкости через гидравлический тракт указанного клапана из полости высокого в полость низкого давления. Соответствующая подпитка гидромотора 5 при этом обеспечивается из сливной магистрали 91 через обратный клапан 226 обратно-предохранительного клапана 115.
Предельная настройка предохранительного клапана 225 обратно-предохранительного клапана 115 в основном определяется допускаемой величиной перегрузки, действующей на механизм поворота 18 стойки 19 и ресурсом его работы. При такой настройке обеспечивается минимально необходимое время разгона и торможения стойки 19, исходя из практической целесообразности и сохранения целостности механизма 18 ее поворота.
При фиксированной настройке предохранительного клапана 225 обратно-предохранительного клапана 115 плавность работы при пуске и торможении стойки 19 зависит от момента инерции вращающихся при этом частей (стрелы 27 с грузом и самой стойки) и скорости перемещения клавиши 190 дистанционного пульта управления 186. Чем больше момент инерции, тем меньше угловое ускорение стойки 19, и тем более плавно происходят ее разгон или торможение.
Управление необходимым вращением стойки 19 осуществляется посредством соответствующего изменения направления вращения выходного вала 210 гидромотора 5 при помощи клавиши 190 дистанционного пульта управления 186.
Для смены направления вращения стойки 19 необходимо переместить клавишу 190 указанного пульта 186 в противоположную сторону после ее останова.
Работа заявляемой гидросистемы в данном случае аналогична вышерассмотренной. При этом защита механизма поворота 18 стойки 19 от перегрузок и подпитка гидромотора 5 обеспечиваются уже соответственно предохранительным и обратным клапанами 225 и 226 другого обратно-предохранительного клапана 116.
При аварийном разрушении во время работы заявляемой гидросистемы напорной магистрали для останова стойки 19 необходимо переместить клавишу 190 дистанционного пульта управления 186 в нулевое положение. При этом торможение стойки 19 происходит штатно (вышерассмотренным способом).
При разрушении сливной магистрали торможение стойки 19 происходит только за счет момента сопротивления в подшипниках 206, 207 основания 167 опорно-поворотного устройства 20.
Перемещение подъемной секции 21 стрелы 27 в вертикальной плоскости осуществляется при помощи соответствующего исполнительного органа 6 посредством поворота ее относительно точки шарнирного закрепления на стойке 19. Задействование указанного исполнительного органа 6 осуществляется при помощи клавиши 191 дистанционного пульта управления 186.
При подаче посредством соответствующего перемещения клавиши 191 командного сигнала на левый электромагнит 68 рабочей секции 53 основного распределителя 32 редукционный клапан 66 указанной секции перемещает ее золотник 65 вправо. При этом напорная магистраль 86 насоса 29 через клапан разности давлений 63 рабочей секции 53 основного распределителя 32, соответствующие каналы в теле ее золотника 65 и обратный клапан 133 блока защиты 126 сообщается с поршневой полостью 40 исполнительного органа 6, а штоковая полость 227 исполнительного органа - через другой обратный клапан 134 блока защиты и соответствующий канал в теле золотника со сливной магистралью 91.
Под действием давления подаваемой от насоса 29 в поршневую полость 40 исполнительного органа 6 рабочей жидкости происходит выдвижение штока, поворачивающего через соответствующий передаточный шарнирно-рычажный механизм подъемную секцию 21 стрелы 27 вверх. При этом из штоковой полости 227 исполнительного органа 6 рабочая жидкость свободно сбрасывается в сливную магистраль 91.
Для останова подъема указанной секции стрелы 27 необходимо отпустить клавишу 191 дистанционного пульта управления 186. При этом она автоматически возвращается в нейтральное (нулевое) положение и выключает электромагнит 68 рабочей секции 53 основного распределителя 32. При выключении электромагнита 68 рабочей секции 53 основного распределителя 32 ее золотник 65 возвращается в исходное (равновесное) положение, полностью перекрывая напорное окно питания исполнительного органа 6 привода подъемной секции 21 стрелы 27 рабочей жидкостью. При этом фиксация штока исполнительного органа 6 привода подъемной секции 21 стрелы производится при помощи предохранительного клапана 128 (до его срабатывания), клапана разности давлений 131, гидрозамка 130 и обратного клапана 133.
Для смены направления движения подъемной секции 21 стрелы 27 необходимо переместить клавишу 191 пульта 186 в противоположную сторону после ее останова.
При указанном перемещении клавиши 191 подается соответствующий командный ток на правый электромагнит 69 рабочей секции 53 основного распределителя 32, при срабатывании которого редукционный клапан 67 указанной секции перемещает ее золотник 65 влево.
При этом напорная магистраль 86 насоса 29 через клапан разности давлений 63 рабочей секции 53 основного распределителя 32, соответствующие каналы в теле ее золотника 65 и подпорный клапан 132 блока защиты 126 сообщается со штоковой полостью 227 исполнительного органа 6, а поршневая полость 40 исполнительного органа через клапан разности давлений 131, гидрозамок 130 блока защиты 125 и другой канал в теле золотника - со сливной магистралью 91.
Под действием давления подаваемой от насоса 29 в штоковую полость 227 исполнительного органа 6 рабочей жидкости открывается гидрозамок 130 блока защиты 126, снимая тем самым фиксацию штока указанного органа, и происходит втягивание штока, поворачивающего через соответствующий передаточный шарнирно-рычажный механизм подъемную секцию 21 стрелы 27 вниз. При этом из поршневой полости 40 исполнительного органа 6 жидкость сбрасывается через клапан разности давлений 131 и гидрозамок 130 блока защиты 126, а также через соответствующий канал в теле золотника 65 в сливную магистраль 91.
Ограничение давления рабочей жидкости в поршневой и штоковой полостях 40, 227 исполнительного органа 6 привода подъемной секции 21 стрелы 27 при действии динамических и реактивных нагрузок, реализуемых, например, при резком торможении перемещаемого груза и встрече стрелы с преградой, осуществляется предохранительными клапанами 128, 129 блока защиты 126.
Герметичный клапан разности давления 131 указанного блока защиты 126 используется в качестве тормозного клапана. Он поддерживает перепад давления на сливном окне рабочей секции 53 основного распределителя, определяемый его настройкой, порядка 8 кгс/см2, при котором при одинаковых командных токах на соответствующих электромагнитах 68, 69 указанной секции скорость втягивания штока исполнительного органа 6 примерно равна скорости его выдвижения, определяемой такой же настройкой клапана разности давления 63 рабочей секции распределителя.
Указанный клапан 131 обеспечивает необходимую плавность и стабильность скорости втягивания штока исполнительного органа при действии изменяющейся попутной нагрузки.
Подпорный клапан 132 блока защиты 126 исключает вероятность снижения до нуля давления рабочей жидкости в магистрали управления гидрозамком 130 при переходных процессах.
Обратные клапаны 133, 134 блока защиты 126 выключают из работы гидрозамок 130, клапан разности давлений 131 и предохранительный клапан 129 при выдвижении штока исполнительного органа 6.
Перемещение выносной секции 22 стрелы 27 в вертикальной плоскости осуществляется при помощи соответствующего исполнительного органа 7 посредством поворота ее относительно точки шарнирного сочленения с подъемной секцией 21. Задействование указанного исполнительного органа 7 осуществляется посредством соответствующих перемещений клавиши 192 дистанционного пульта 186, обеспечивающей подачу необходимых командных токов на электромагниты 68, 69 рабочей секции 54 основного распределителя 32.
При этом вследствие идентичности конструктивного исполнения приводов подъемной и выносной секций 21, 22 стрелы 27 работа последней из них практически ничем не отличается от работы первой, особенности которой подробно рассмотрены выше по тексту.
Необходимые перемещения выдвижных телескопических секций 23-26 стрелы 27 осуществляются при помощи соответствующих исполнительных органов 8-11 их привода. Задействование указанных исполнительных органов 8-11 осуществляется при помощи клавиши 193 дистанционного пульта управления 186.
При подаче посредством соответствующего перемещения указанной клавиши 193 командного сигнала на электромагнит 68 рабочей секции 55 основного распределителя 32 редукционный клапан 66 данной секции перемещает ее золотник 65 вправо.
При этом напорная магистраль 86 насоса 29 через клапан разности давлений 63 рабочей секции 55 основного распределителя 32 и соответствующие каналы в теле ее золотника 65, а также магистраль питания 111, обратный клапан тормозного клапана ТК, поршневые тракты 144, 146, 148 в штоках 143 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 и поршневые внешние магистрали 150, 152, 154 указанных органов сообщается практически напрямую соответственно с их поршневыми полостями 135, 137, 139, 141.
Одновременно с этим штоковые полости 136, 138, 140 и 142 указанных исполнительных органов 8-11 через штоковые внешние магистрали 151, 153, 155 и встроенные в них обратно-предохранительные клапаны 156-158, а также штоковые тракты 145, 147, 149 в телах их штоков 143, магистраль питания 112 и принудительно открываемый управляющим давлением магистрали 111 соответствующий запорный элемент тормозного клапана ТК канал в теле золотника 65 рабочей секции 55 основного распределителя 32 соединяются со сливной магистралью 91.
Подводимая от насоса 29 через внутренний поршневой тракт 144 в поршневую полость 135 исполнительного органа 8 привода первой выдвижной телескопической секции 23 стрелы 27 рабочая жидкость практически одновременно поступает по вышеуказанным линиям и в поршневые полости 137, 149 и 141 остальных исполнительных органов 9-11 данной группы.
При этом вытеснение (слив) рабочей жидкости из штоковых полостей 136, 138, 140, 142 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27 может происходить только следующим образом:
- из штоковой полости 136 исполнительного органа 8 привода первой выдвижной телескопической секции 23 - напроход через его внутренний штоковый тракт 145;
- из штоковой полости 138 исполнительного органа 9 привода второй выдвижной телескопической секции 24 - через предохранительный клапан 159 обратно-предохранительного клапана 156, обратный клапан 228 обходного контура которого в это время закрыт, соответствующие внешнюю штоковую магистраль 151, штоковую полость 136 исполнительного органа 8 привода первой выдвижной телескопической секции 23 и его внутренний штоковый тракт 145;
- из штоковой полости 140 исполнительного органа 10 привода третьей выдвижной телескопической секции 25 - через предохранительный клапан 160 обратно-предохранительного клапана 157, обратный клапан 228 обходного контура которого в это время закрыт, соответствующие внешнюю штоковую магистраль 153 и внутренний штоковый тракт 147, штоковую полость 138 исполнительного органа 9 привода второй выдвижной телескопической секции 24, предохранительный клапан 159 обратно-предохранительного клапана 156, обратный клапан 228 обходного контура которого в это время закрыт, внешнюю штоковую магистраль 151, штоковую полость 136 исполнительного органа 8 привода первой выдвижной телескопической секции 23 и его внутренний штоковый тракт 145;
- из штоковой полости 142 исполнительного органа 11 привода замыкающей выдвижной телескопической секции 26 - через предохранительный клапан 161 обратно-предохранительного клапана 158, обратный клапан 228 обходного контура которого в это время закрыт, соответствующие внешнюю штоковую магистраль 155 и внутренний штоковый тракт 149, штоковую полость 140 исполнительного органа 10 привода третьей выдвижной телескопической секции 25, предохранительный клапан 160 обратно-предохранительного клапана 157, обратный клапан 228 обходного контура которого в это время закрыт, внешнюю штоковую магистраль 153 и внутренний штоковый тракт 147, штоковую полость 138 исполнительного органа 9 привода второй выдвижной телескопической секции 24, предохранительный клапан 159 обратно-предохранительного клапана 156, обратный клапан 228 обходного контура которого в это время закрыт, внешнюю штоковую магистраль 151, штоковую полость 136 исполнительного органа 8 привода первой выдвижной телескопической секции 23 и его внутренний штоковый тракт 145.
Гидравлические сопротивления каждой из рассмотренных линий прохода вытесняемой из штоковых полостей 136, 138, 140, 142 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27 рабочей жидкости различны и в основном, определяются соответствующим перепадом давления настройки предохранительных клапанов 159-161. В первой линии оно минимально, поскольку в ней нет обратно-предохранительных клапанов. Во второй оно несколько больше, чем в первой, поскольку в ней имеется один обратно-предохранительный клапан 156. В третьей линии оно еще больше, поскольку в ней уже имеется два обратно-предохранительных клапана 156, 157.
И, наконец, в четвертой линии оно максимально, поскольку в ней имеется три обратно-предохранительных клапана 156,157,158.
Помимо указанных гидравлических сопротивлений перемещению выдвижных телескопических секций 23-26 стрелы 27 противодействуют также и соответствующие силы трения, имеющие место в их подвижных соединениях. При этом из-за особенностей конструктивного исполнения телескопической части стрелы 27 в подвижном соединении ее выносной и первой телескопической секций 22 и 23 сила трения обычно максимальна, а в последующих убывает до минимальной в подвижном соединении третьей и замыкающей выдвижных телескопических секций 25 и 26.
В связи с этим предохранительные клапаны 159-161 обратно-предохранительных клапанов 156-158 настраивают на одинаковый перепад давления такой величины, чтобы суммарное сопротивление перемещению первой выдвижной телескопической секции 23 было минимальным, а далее оно бы соответственно возрастало до максимального при перемещении ее замыкающей выдвижной телескопической секции 26.
Поскольку любое перемещение происходит обычно по линии наименьшего сопротивления, то в результате при одновременной подаче рабочей жидкости в поршневые полости 135, 137, 139, 141 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 они будут выдвигаться строго последовательно, начиная с первой и кончая замыкающей.
Для останова выдвигаемых телескопических секций 23-26 стрелы 27 необходимо отпустить клавишу 193 дистанционного пульта управления 186. При этом она автоматически возвращается в нейтральное (нулевое) положение и выключает электромагнит 68 рабочей секции 55 основного распределителя 32. При выключении электромагнита 68 рабочей секции 55 основного распределителя 32 ее золотник 65 возвращается в исходное (равновесное) положение, полностью перекрывая напорное окно питания исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27 рабочей жидкостью.
Для смены направления движения указанных секций 23-26 стрелы 27 необходимо после их останова переместить клавишу 193 дистанционного пульта управления 186 в противоположную сторону.
При указанном перемещении клавиши 193 подается соответствующий командный ток на правый электромагнит 69 рабочей секции 55 основного распределителя 32, при срабатывании которого редукционный клапан 67 указанной секции перемещает ее золотник 65 влево. При этом напорная магистраль 86 насоса 29 через клапан разности давлений 63 рабочей секции 55 основного распределителя 32 и соответствующие каналы в теле ее золотника 65, а также магистраль питания 112, обратный клапан тормозного клапана ТК, внутренние штоковые тракты 145, 147, 149, внешние штоковые магистрали 151, 153, 155 и встроенные в них обратно-предохранительные клапаны 156-158 сообщается со штоковыми полостями 136, 138, 140, 142 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27.
Одновременно с этим поршневые полости 135, 137, 139, 141 указанных исполнительных органов 8-11 через внешние поршневые магистрали 150, 152, 154, внутренние поршневые тракты 144, 146, 148, магистраль питания 111 и принудительно открываемый управляющим давлением магистрали 112 соответствующий запорный элемент тормозного клапана ТК канал в теле золотника 65 рабочей секции 55 основного распределителя 32 соединяются со сливной магистралью 91.
Подаваемая насосом 29 в штоковые полости 136, 138, 140, 142 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27 рабочая жидкость в данном случае проходит через автоматически открывающиеся под ее напором обратные клапаны 228 обходных контуров обратно-предохранительных клапанов 156-158, минуя их запертые предохранительные клапаны 159-161. При этом она поступает во все из указанных полостей практически одновременно.
Вытеснение (слив) рабочей жидкости из поршневых полостей 141, 139, 137, 135 исполнительных органов 11-8, в принципе, также могло бы осуществляться одновременно, поскольку все они сообщаются между собой напроход гидравлическими линиями одинакового проходного сечения.
Однако определяющим фактором в этом случае для гарантированного обеспечения необходимой последовательности втягивания выдвижных телескопических секций 23-26 стрелы 27 являются вышеупомянутые силы трения, имеющие место в их подвижных соединениях.
Поскольку в подвижном соединении третьей и замыкающей выдвижных телескопических секций 25 и 26 стрелы 27 сила трения минимальна и соответственно последовательно возрастает до максимальной в подвижном соединении ее выносной и первой выдвижной телескопической секции 22 и 23, то и втягивание будет происходить поочередно в порядке, обратном выдвижению, т.е. сначала будет втягиваться замыкающая выдвижная телескопическая секция, а за ней последовательно третья, вторая и первая выдвижные телескопические секции 25-23.
Принцип работы встроенной в магистрали питания 111, 112 исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27 защитно-предохранительной аппаратуры (обратно-предохранительных клапанов 113, 114 клапанного блока 121) точно такой же, как и у защитно-предохранительной аппаратуры (обратно-предохранительных клапанов 115, 116 того же блока), встроенной в магистрали питания 109, 110 гидромотора 5 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20, особенности функционирования которой достаточно подробно рассмотрены выше по тексту.
При обрыве магистралей питания исполнительных органов 8-11 привода выдвижных телескопических секций 23-26 стрелы 27 несанкционированное истечение жидкости из рабочих полостей указанных органов исключается, как и в прототипе, установленным перед первым из них тормозным клапаном ТК, имеющем в своем составе два запорных элемента (клапана). Указанный тормозной клапан ТК обеспечивает также и стабильность скоростей перемещения штоков соответствующих исполнительных органов при действии попутных нагрузок.
Поворот подвешиваемого на конце замыкающей выдвижной телескопической секции 26 стрелы 27 гидрофицированного рабочего инструмента (грейфера) 28 в горизонтальной плоскости осуществляется при помощи соответствующего исполнительного органа (ротатора) 12, представляющего собой гидродвигатель поворотного действия с ограниченным или бесконечным углом поворота его выходного вала, жестко скрепленного с корпусом указанного инструмента.
Смыкание и размыкание грузозахватных челюстей 229, 230 указанного инструмента 28 производится при помощи исполнительного органа 13, представляющего собой гидроцилиндр двухстороннего действия с односторонним штоком.
Для управления ротатором 12 используется клавиша 194 дистанционного пульта 186, посредством соответствующих перемещений которой включаются и выключаются электромагниты 68, 69 рабочей секции 57 основного распределителя 32, обеспечивающие при помощи редукционных клапанов 66, 67 указанной секции необходимые перемещения, а также возврат в исходное (равновесное) состояние ее золотника 65.
Коммутация потоков жидкости посредством соответствующих перемещений золотника 65 рабочей секции 57 основного распределителя 32, а также принцип работы ротатора 12 и встроенной в его магистрали питания 59, 60 защитно-предохранительной аппаратуры (обратно-предохранительных клапанов 117, 118 клапанного блока 121) точно такие же, как и для гидромотора 5 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20, особенности функционирования которого достаточно подробно рассмотрены выше по тексту.
При подаче жидкости в ту или другую из рабочих полостей 231, 232 ротатора 12 он поворачивает грейфер 28 в горизонтальной плоскости в соответствующую сторону.
Обратно-предохранительные клапаны 117, 118 блока 121 ограничивают величину давления в напорных полостях 231, 232 ротатора 12 и обеспечивают их подпитку жидкостью из сливной магистрали 91 при ее снижении в момент срабатывания их предохранительных клапанов 225.
Для управления гидроцилиндром 13 привода грузозахватных челюстей 229, 230 грейфера 28 используется клавиша 195 дистанционного пульта 186, посредством соответствующих перемещений которой включаются и выключаются электромагниты 68, 69 рабочей секции 58 основного распределителя 32, обеспечивающие при помощи редукционных клапанов 66, 67 указанной секции необходимые перемещения, а также возврат в исходное (равновесное) состояние ее золотника 65.
Коммутация потоков жидкости посредством соответствующих перемещений золотника 65 рабочей секции 58 основного распределителя 32, а также принцип работы гидроцилиндра 13 и встроенной в его магистрали питания 61, 62 защитно-предохранительной аппаратуры (обратно-предохранительных клапанов 119, 120 клапанного блока 121) точно такие же, как и других исполнительных органов 5, 8-12 рассматриваемой группы, особенности функционирования которых достаточно подробно рассмотрены выше по тексту.
При подаче жидкости в поршневую полость 233 гидроцилиндра 13 происходит выдвижение штока и соответствующий поворот навстречу друг другу шарнирно сочлененных с ним и корпусом указанного гидроцилиндра грузозахватных челюстей 229, 230 грейфера 28 вокруг их осей вращения. Смыкающиеся таким образом челюсти 229, 230 грейфера 28 обеспечивают захват и удержание груза при его перемещении.
При подаче жидкости в штоковую полость 234 гидроцилиндра 13 происходит втягивание штока в его корпус и соответствующий поворот в противоположные стороны грузозахватных челюстей 229, 230 грейфера 28 вокруг их осей вращения. Размыкаемые таким образом челюсти 229, 230 грейфера 28 отпускают удерживаемый груз.
Обратно-предохранительные клапаны 119, 120 ограничивают величину давления в рабочих полостях 233, 234 гидроцилиндра 13 привода челюстей 229, 230 гидрофицированного инструмента 28 и обеспечивают их подпитку жидкостью из сливной магистрали 91 при ее снижении в момент срабатывания указанных клапанов.
Наличие в магистралях питания 59-62 исполнительных органов 12, 13 такой защитно-предохранительной аппаратуры существенно облегчает решение проблемы адаптации заявляемой гидросистемы к покупному либо заимствованному из состава других крано-манипуляторных установок гидрофицированному рабочему инструменту 28. Номенклатура и типоразмеры такого инструмента весьма велики, а давление питания их исполнительных органов рабочей жидкостью, как правило, различно.
Подвод рабочей жидкости к исполнительным органам 12, 13 гидрофицированного рабочего инструмента 28 осуществляется через подсоединенные к ним гибкие шланги 172 компенсационных вставок 173-176 соответствующих гидравлических магистралей 59-62, проложенных по металлоконструкции стрелы 27. При этом в случае увеличения вылета стрелы 27 посредством телескопирования синхронно с выдвигаемыми секциями 23-26 перемещаются и закрепленные на консольной части ее замыкающей секции 26 присоединители 174 указанных шлангов и подстыковываемые к ним концевые присоединители 179 гидрофицированного рабочего инструмента 28. Под действием передаваемых через гибкие шланги 172 на натяжные барабаны 171 гидравлических поворотных соединителей 170 тяговых усилий, они, преодолевая сопротивление встроенных в них соответствующих спиральных возвратных пружин начинают вращаться в сторону эвакуации (сматывания) с них шлангов. При этом одновременно происходит автоматическая заводка спиральных возвратных пружин указанных соединителей 172.
При уменьшении вылета стрелы 27 посредством втягивания ее телескопических секций 23-26 гибкие шланги 172 компенсационных вставок 173-176 под действием усилий раскручивающихся спиральных возвратных пружин вновь наматываются на ободы натяжных барабанов 171 гидравлических поворотных соединителей 170.
В процессе указанных перемещений выдвижных телескопических секций 23-26 стрелы 27 бесперебойная подача рабочей жидкости к исполнительным органам 12, 13 гидрофицированного рабочего инструмента 28 и обратно осуществляется через соответствующие герметизированные внутренние тракты соединителей.
Наличие в заявляемой гидросистеме такого рода гидравлических соединителей для передачи соответствующих потоков рабочей жидкости от неподвижной части конструкции к подвижной обеспечивает достаточно компактную, без провисания, укладку указанных гибких шлангов в данной зоне и возможность формирования без особых затруднений и ухудшения товарного вида машины участков телескопирования большой протяженности.
По мере заполнения транспортировочной платформы машины погружаемым крано-манипуляторной установкой материалом действующая на лапы 14, 15 выносных аутригеров 16, 17 нагрузка, а следовательно, и давление в поршневых полостях 203, 204 соответствующих исполнительных органов 3, 4, возрастает до предельно допустимой величины.
При превышении ее автоматически открываются запорные элементы установленных в магистралях питания 101, 102 исполнительных органов 3, 4 тормозных клапанов 103, 104 и рабочая жидкость перепускается в сливную магистраль 91. При этом происходит сброс давления из поршневых полостей 203, 204 указанных исполнительных органов 3, 4 и соответствующая управляемая просадка в замедленном темпе лап 14, 15 выносных аутригеров 16, 17 до тех пор, пока снижаемая таким образом величина давления в них не уравняется с давлением настройки тормозных клапанов 103,104.
В момент уравнивания указанных давлений запорные элементы тормозных клапанов 103, 104 вновь автоматически закрываются, разобщая поршневые полости 203, 204 исполнительных органов 3, 4 со сливной магистралью 91. В процессе загрузки транспортировочной платформы машины перевозимым материалом тормозные клапаны 103, 104 циклически работают в таком режиме до момента окончания работы, обеспечивая силовую разгрузку и предохранение лап 14, 15 выносных аутригеров 16, 17 от поломки без участия в этом оператора.
В основном чувствительном к нагрузке распределителе 32 клапаны разности давлений 63 установлены во всех его рабочих секциях 53-58. Благодаря этому в заявляемой гидросистеме, в отличие от прототипа, можно реализовать параллельную, независимую работу сразу нескольких исполнительных органов 5-13.
В этом случае первичный предохранительный клапан 163 должен быть закрыт, регулятор ограничения мощности 100 насоса 29 выключен, чтобы нагрузки были ниже предельных, а рабочий объем последнего меньше максимального. При одновременном включении нескольких золотников 65 указанного распределителя 32 соответствующие секции 53-58 его работают аналогично. При этом давление от более нагруженного исполнительного механизма запирает обратные клапаны 64 остальных секций и управляет входным давлением напорной магистрали 86 таким образом, что оно превышает его на величину, порядка 20 кгс/см2, равную давлению настройки чувствительного к нагрузке блока (регулятора) 47 насоса 29. В результате входное давление гидросистемы постоянно поддерживается максимально необходимым для работы исполнительных органов 5-13 привода (адаптация к нагрузке).
Насос 29 в этом случае автоматически подстраивается под необходимый для распределителя 32 расход жидкости. Поэтому при работе гидросистемы не происходит сброса избытка жидкости под давлением в бак 30 и ее дополнительного перегрева.
Реализация в заявляемой гидросистеме возможности одновременного совмещения нескольких операций с адаптацией ее к нагрузке при достаточно низком уровне энергетических потерь существенно расширяет функциональные возможности крано-манипуляторной установки и чрезвычайно важна как для производителей грузоподъемного оборудования данного типа, так и для потребителей, особенно в условиях значительного повышения требований к машинам и обострения конкуренции на рынке.
При работе исполнительных органов 5-13 привода механизма поворота 18 стойки 19, стрелового оборудования 21-26 и гидрофицированного рабочего инструмента 28 в штатном режиме электромагнит 92 пилота дополнительного распределителя 36 системы форсирования грузоподъемности 166 крано-манипуляторной установки обесточен. При этом необходимое давление рабочей жидкости в напорной магистрали 86 ограничивается автономным предохранительным клапаном 163, настроенным на соответствующий перепад давления порядка 285 кгс/см2.
Для перевода крано-манипуляторной установки в режим форсирования ее грузоподъемности соответствующий переключатель 189 дистанционного пульта управления 186 переводят в позицию "включено". При этом на электромагнит 92 пилота дополнительного распределителя 36 подается соответствующее управляющее напряжение. При срабатывании электромагнита золотник 93 указанного распределителя 36 разобщает выход насоса 29 с автономным предохранительным клапаном 163.
В результате в работу вступает предохранительный клапан 35 непрямого действия клапанной секции 34 основного чувствительного к нагрузке распределителя 32, настроенный на несколько больший, порядка 320 кгс/см, перепад давления, и давление рабочей жидкости в напорной магистрали 86 соответственно повышается примерно на 15%, обеспечивая необходимое увеличение грузоподъемности.
Одновременно электроникой системы управления 41 программно уменьшаются величины максимальных управляющих сигналов, подаваемых на электромагниты 68, 69 рабочих секций 53-58 основного чувствительного к нагрузке распределителя 32 для снижения примерно в таком же соотношении скоростей вращения стойки 19, перемещений секций 21-26 стрелы 27 и соответствующих движений гидрофицированного рабочего инструмента 28.
Наличие такой системы 166 в заявляемой гидросистеме позволяет, при необходимости, преимущественно в экстремальных ситуациях, кратковременно форсировать в допустимых пределах мощность привода (грузоподъемность крано-манипуляторной установки).
Указанная особенность заявляемой гидросистемы существенно расширяет функциональные возможности крано-манипуляторной установки и чрезвычайно важна при погрузке-разгрузке материалов неупорядоченной структуры и размеров, например, металлолома, строительных отходов, а также при разборке завалов в местах стихийных бедствий природного или техногенного характера и в ряде других случаев.
В процессе работы давление на выходе из насоса 29 определяется нагрузкой на соответствующем исполнительном органе и ограничивается предусмотренной для этого в заявляемой гидросистеме защитно-предохранительной и регулирующей аппаратурой.
Подача рабочей жидкости определяется настройкой размещенных в рабочих секциях 53-58 чувствительного к нагрузке распределителя 32 клапанов разности давлений 63 и соответствующими перемещениями запорно-регулирующих золотников 65 и 75 указанных секций и секций 72-74 другого не чувствительного к нагрузке основного распределителя 33, а также соответствующими утечками и потреблением ее на управление.
Регулирование рабочего объема насоса 29 осуществляется соответствующим наклоном его блока цилиндров относительно оси выходного вала.
Регулятор мощности 100 насоса 29 автоматически поддерживает потребляемую мощность (крутящий момент), снимаемую с приводного вала, например коробки отбора мощности двигателя шасси, на котором устанавливается крано-манипуляторная установка, при изменении давления в гидросистеме посредством соответствующего изменения угла наклона блока цилиндров.
Чувствительный к нагрузке блок 47 насоса 29 обеспечивает постоянный, порядка 20 кгс/см2, перепад давления между выходом насоса и наиболее нагруженным напорным трубопроводом соответствующего исполнительного механизма.
При этом в режиме работы "Стойка, стрела" заявляемой гидросистемы на напорной кромке золотника 65 соответствующей рабочей секции чувствительного к нагрузке распределителя 32 поддерживается постоянный, порядка 8 кгс/см2, перепад давления.
В режиме работы “Аутригеры” на напорной кромке золотника 75 соответствующей рабочей секции второго, не чувствительного к нагрузке, основного распределителя 33 указанный перепад может быть меньше, так как в данном случае не требуется больших мощностей.
Регулятор мощности 100 насоса 29 может быть перестроен при помощи не входящего в состав насоса клапана редукционного 97 заявляемой гидросистемы путем изменения управляющего давления, подаваемого от него по соответствующей магистрали на чувствительный к нагрузке блок 47 указанного насоса, пропорционально величине ограничиваемой мощности.
В заявляемой гидросистеме указанный редукционный клапан 97 запитывается непосредственно от ее штатного аксиально-поршневого насоса 29. Данная особенность схемного исполнения позволяет упростить заявляемую гидросистему и соответственно снизить на этой основе ее стоимость по сравнению с известньми зарубежными чувствительными к нагрузке гидросистемами, в которых для запитки таких клапанов используются сравнительно дорогие специальные дополнительные насосы (см. например, статью В.И. Дорощенко, А. А. Гинзбурга, ГСКТБ ГА, г. Гомель, опубликованную на стр. 34-38 журнала “Строительные и дорожные машины”, №5 за 1998 год).
На регулятор мощности 100 подается управляющее давление порядка (6-60) кгс/см2.
При этом большему давлению управления соответствует и большая снимаемая с вала насоса 29 мощность.
При работе регулятора мощности 100 чувствительный к нагрузке блок 47 насоса 29 не функционирует.
До работы регулятора мощности 100 указанный блок 47 насоса 29 поддерживает постоянный перепад давления, порядка 20 кгс/см2, между выходом насоса и напорным трубопроводом наиболее нагруженного исполнительного органа гидросистемы.
Если же одновременно работают несколько рабочих секций 53-58 чувствительного к нагрузке основного распределителя 32, то соответствующие расходы жидкости складываются (но только до включения регулятора мощности 100 насоса 29).
При включении регулятора мощности 100 и увеличении давления рабочей жидкости на выходе насоса 29 его расход изменяется так, чтобы обеспечить снятие с приводного вала настроенной (заданной) величины мощности.
Как уже отмечалось выше, при остановках исполнительных органов 3-13 и 43, 44 заявляемой гидросистемы насос 29 разгружается по расходу, переходя, практически, на нулевой рабочий объем, и давлению примерно до 20 кгс/см2.
Указанная разгрузка, реализуемая путем соединения при остановке исполнительных органов соответствующих гидравлических магистралей управления со сливом, позволяет значительно улучшить энергетические характеристики заявляемой гидросистемы и упростить задачу формирования управляющего давления, необходимого для дистанционного перемещения запорно-регулирующих золотников основных распределителей из нейтрального (разгруженного) положения в рабочее.
Регулирование скорости различных движений крано-манипуляторной установки осуществляется посредством соответствующих перемещений управляющих клавиш 190-195 дистанционного пульта 186 из нулевого (нейтрального) положения до предельного.
При относительно небольшом перемещении клавиш 190-195 указанного пульта 186 соответствующие движения крано-манипуляторной установки происходят медленно и наоборот, при увеличении отклонения клавиши от нейтрали скорость движений соответственно возрастает. При этом указанное изменение скорости прямо пропорционально величине соответствующего отклонения клавиши от нейтрали.
Из графической зависимости, приведенной на фиг.33, видно, что для регулирования скорости указанных движений может быть использовано около 100% всей области перемещения клавиш 190-195. Указанный эффект обеспечивается особенностями схемно-конструктивного исполнения пульта 186 и соответствующим программированием электроники системы управления.
Для управления работой исполнительных органов 5-13 привода механизма поворота 18 стойки 19 опорно-поворотного устройства 20, секций 21-26 стрелы 27 и гидрофицированного рабочего инструмента 28 используется чувствительный к нагрузке гидропривод. В связи с этим, как отмечалось уже выше, в каждой из рабочих секций 53-58 чувствительного к нагрузке основного распределителя 32 установлены автономные клапаны разности давлений 63, которые при открытом напорном окне золотника 65 поддерживают на нем определенный, порядка 8 кгс/см2, перепад давления.
Вследствие данной особенности соответствующий расход рабочей жидкости через напорное окно указанного золотника 65 зависит только от фактической площади его открытия.
В принципе, конструкция вышеупомянутых клапанов разности давлений 63 позволяет изменять настройку указанного перепада давления в достаточно широком, порядка (2-32) кгс/см2, диапазоне. Такой диапазон давления пропорционален изменению расхода жидкости через напорное окно, а следовательно, и скорости соответствующего движения крано-манипуляторной установки, примерно в четыре раза.
А если учесть, что особенности схемно-конструктивного исполнения и соответствующее программирование электроники системы управления 41 позволяют в определенной степени дополнительно изменять коэффициент передачи "управляющая клавиша дистанционного пульта (командный ток) - перемещение золотника 65 рабочей секции чувствительного к нагрузке основного распределителя", а следовательно, и величину скорости соответствующего движения крано-манипуляторной установки, то очевидно, что это способствует значительному расширению технических возможностей заявляемой гидросистемы.
При необходимости, электроника системы управления 41 заявляемой гидросистемы может ограничить скорость перемещения золотника 65 основного распределителя 32 независимо от характера перемещения клавиш дистанционного пульта, что очень важно при резком (случайном) ее отпускании. При этом время перемещения золотника из равновеского (нулевого) положения в предельное рабочее может достигать порядка 2-5 секунд. Необходимый закон изменения управляющего сигнала обеспечивается особенностями схемно-конструктивного исполнения и соответствующим программированием системы управления 41.
В связи с этим она без каких-либо ограничений может быть широко использована как для тихоходных, так и для быстродействующих крано-манипуляторных установок.
Имеющийся в составе заявляемой гидросистемы ограничитель грузоподъемности 37 крано-манипуляторной установки более эффективен, чем используемый в прототипе, поскольку он обеспечивает соответствующую защиту указанной установки не по одному, а по двум каналам как по линии подъемной, так и выносной секций 21, 22 ее стрелы 27.
Входящее в его состав электронное устройство безопасности 38 имеет гораздо большую чувствительность и в совокупности с системой управления 41 позволяет в процессе работы заблаговременно уведомить оператора о соответствующем увеличении, вплоть до предельной величины, грузоподъемности крано-манипуляторной установки с последующим блокированием любых его действий, способствующих дальнейшему росту грузоподъемности выше указанной величины, и гарантированным исключением возможности обхода им данного запрета.
При этом, если в процессе работы грузоподъемность крано-манипуляторной установки в определенном кинематическом положении была неправильно оценена оператором или превышена и, как следствие, соответствующие движения ее, способствующие дальнейшему увеличению грузоподъемности, блокируются, необходимо перейти на режим форсирования грузоподъемности. При недостаточности этого для выхода из данной критической ситуации следует уменьшить вылет стрелы либо опустить груз.
Факт засоренности сменных фильтроэлементов 182 сливного и напорного фильтров 31, 96 в процессе работы заявляемой гидросистемы фиксируется на жидкостно-кристаллическом дисплее 198 дистанционного пульта 186 системы управления 41 с одновременным сопровождением данной текстовой информации для привлечения внимания оператора миганием красного светового индикатора 199 и соответствующим звуковым сигналом зуммера указанного пульта.
Аналогичным образом на указанном дисплее 198 фиксируется и информация о температуре рабочей жидкости в баке 30 и ее уровне.
Оперативное оповещение оператора об указанных событиях позволяет ему вовремя критически оценить возникшую ситуацию и принять необходимые меры по ее нормализации.
Чистота рабочей жидкости, а следовательно, и безотказность работы гидравлической аппаратуры, во многом зависят от своевременной замены фильтроэлементов 182 в указанных фильтрах. При этом несвоевременная замена их в большинстве случаев не приводит к немедленному отказу соответствующей гидравлической аппаратуры.
Однако указанное обстоятельство опосредованно в связи с соответствующим загрязнением по этой причине рабочей жидкости, резко сокращает ресурс работы исполнительных органов 3-13, 43, 44, насоса 29, распределителей 32, 33, 36, 87 и других агрегатов гидросистемы с подвижными сопрягаемыми парами прецизионного исполнения и в определенной степени способствует снижению производительности работы машины.
Из общедоступной специальной литературы (см., например, журнал “Строительные и дорожные машины”, №10 за 1995 год, стр.18) известно, что работа чувствительных к нагрузке гидросистем может сопровождаться автоколебаниями вследствие относительно замедленной передачи сигнала чувствительной к нагрузке обратной связи. В заявляемой гидросистеме имеется два чувствительных к нагрузке регулятора (один в насосе 29, а другой в основном распределителе 32), благодаря чему указанные автоколебания могут быть снижены до приемлемого уровня либо полностью исключены.
Общеизвестно (см., например, журнал “Строительные и дорожные машины” №5 за 1998 год, стр.36), что быстродействие клапанных устройств, примерно, на порядок выше быстродействия объемных гидравлических машин (насосов). Поэтому в данном случае в переходных процессах чувствительному к нагрузке блоку насоса будет помогать чувствительный к нагрузке регулятор соответствующего основного распределителя. Для этого только посредством соответствующей регулировки следует экспериментально подобрать необходимую “разбежку” настроек указанных регуляторов.
В случае выхода из строя дистанционного пульта управления 186 для возврата крано-манипуляторной установки в исходное (транспортное) положение необходимые перемещения золотников 65, 75, 90, 93, входящих в состав заявляемой гидросистемы распределителей 32, 33, 36, 87, осуществляются в режиме прямого (ручного) управления при помощи соответствующих рукояток 94 рычажного типа.
При аварийном останове приводного вала (двигателя автомобильного транспортного средства) для экстренного перевода крано-манипуляторной установки в исходное положение может быть использована соответствующая автономная насосная станция с электрическим либо иным приводом, для подключения которой в заявляемой гидросистеме предусмотрены соответствующие присоединители.
Заявляемая гидросистема достаточно легко сопрягается с механической частью и электрооборудованием крано-манипуляторной установки.
Она обеспечивает высокую производительность, надежность и безопасность работы крано-манипуляторной установки.
Особенности схемно-конструктивного исполнения указанной гидросистемы позволяют реализовать чувствительное к нагрузке пропорциональное управление всеми рабочими движениями крано-манипуляторной установки, в том числе и при изменяющемся нагрузочном моменте.
Она достаточно проста и удобна в техническом обслуживании и позволяет кардинальным образом улучшить условия труда оператора.
В заявляемой гидросистеме использованы широко применяемые в машиностроении высококачественные отечественные конструкционные материалы, а также соответствующая аппаратурная элементная база, не уступающая по своим техническим характеристикам зарубежной, рациональные технические решения и типовая технология изготовления.
Широкое использование в составе гидросистемы различного рода серийных агрегатов и элементов способствует существенному повышению качества соответствующей специализированной техники, создаваемой на базе крано-манипуляторных установок, при одновременном снижении стоимости, а также сроков ее проектирования и изготовления.
Заложенные в нее схемно-конструктивные и другие решения позволяют поднять уровень отечественных крано-манипуляторных установок по их функциональным возможностям и технико-эксплуатационным показателям до современного и на этой основе значительно повысить конкурентоспособность данного оборудования.
С учетом вышеизложенного, а также соответствующих требований, предъявляемых ГОСГОРТЕХНАДЗОРом и другими ведомствами к подобного рода продукции, она может быть многократно воспроизведена по разработанной на нее документации в условиях серийного производства на специализированных предприятиях, располагающих необходимым оборудованием, персоналом и соответствующей нормативно-разрешающей базой.
В настоящее время в ЗАО "НК Уралтерминалмаш" полностью разработана соответствующая конструкторская документация, по которой изготовлен полномасштабный действующий образец заявляемой гидросистемы для крано-манипуляторной установки "Си-негорец-210" тяжелого класса со следующими техническими характеристиками:
ТУ 22-1.020-100-95
ТУ 4145-012-07522144-00
ТУ 4145-012-07522144-00
Эффективность заложенных в конструкцию заявляемой гидросистемы решений, а также возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в устранении вышеупомянутых недостатков известных аналогов и прототипа, а именно в улучшении его технико-эксплуатационных и других качеств, позволяющем достигнуть современного технического уровня и конкурентоспособности грузоподъемных машин рассматриваемого класса, подтверждены соответствующими расчетами и результатами специальных автономных испытаний всех ее составных фрагментов.
В настоящее время она проходит комплексную проверку в составе крано-манипуляторной установки "Синегорец-210".
Решение о серийном производстве заявляемой гидросистемы будет принято после завершения указанных комплексных испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
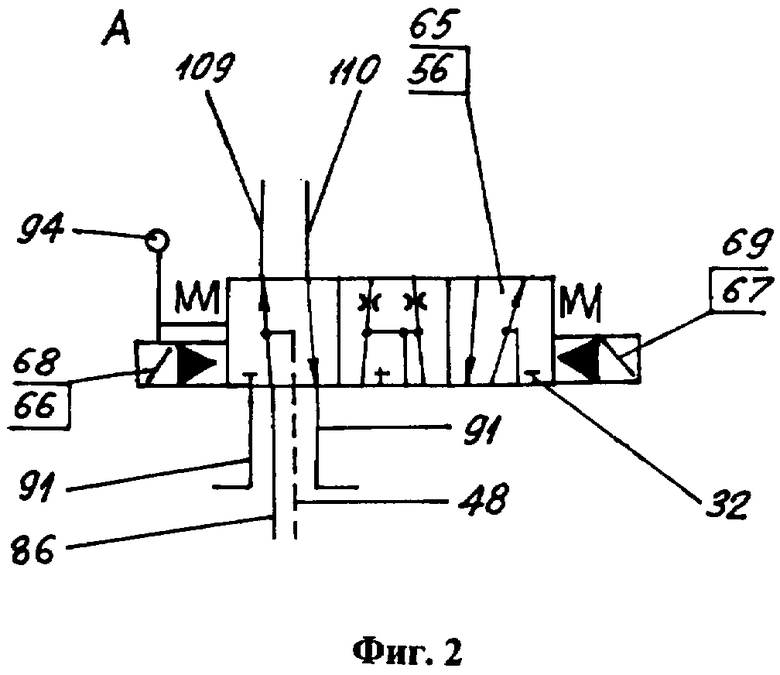
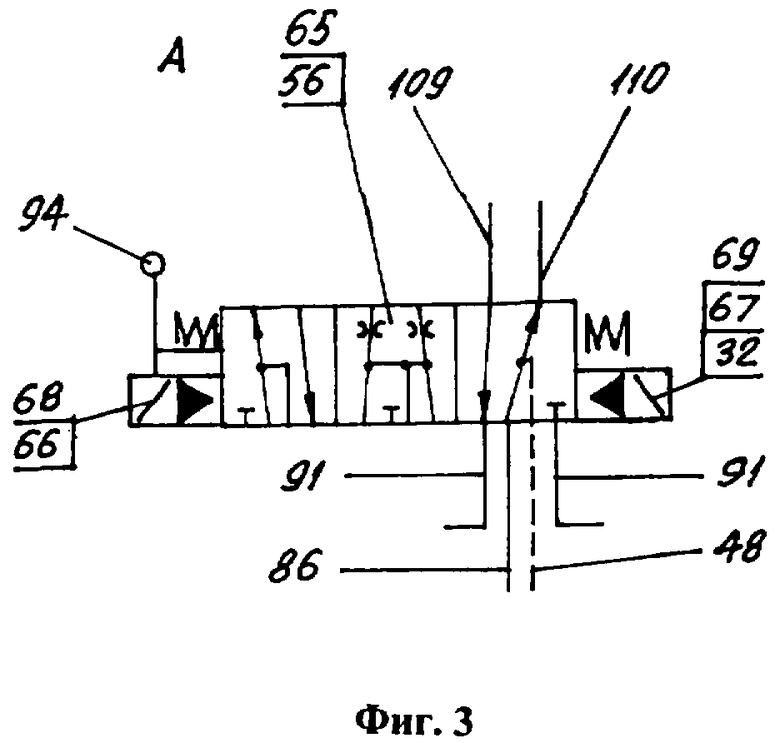







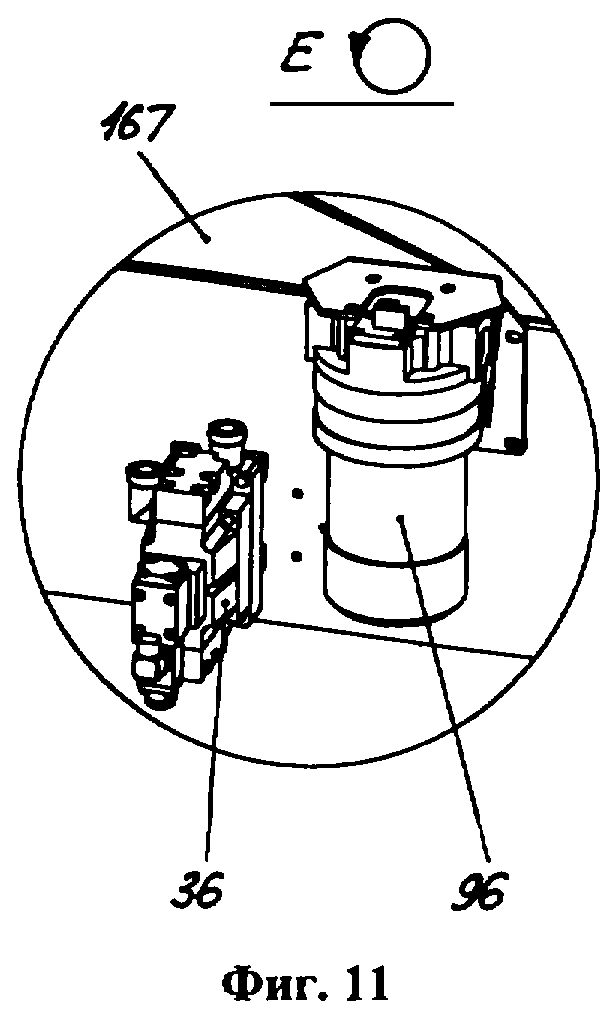



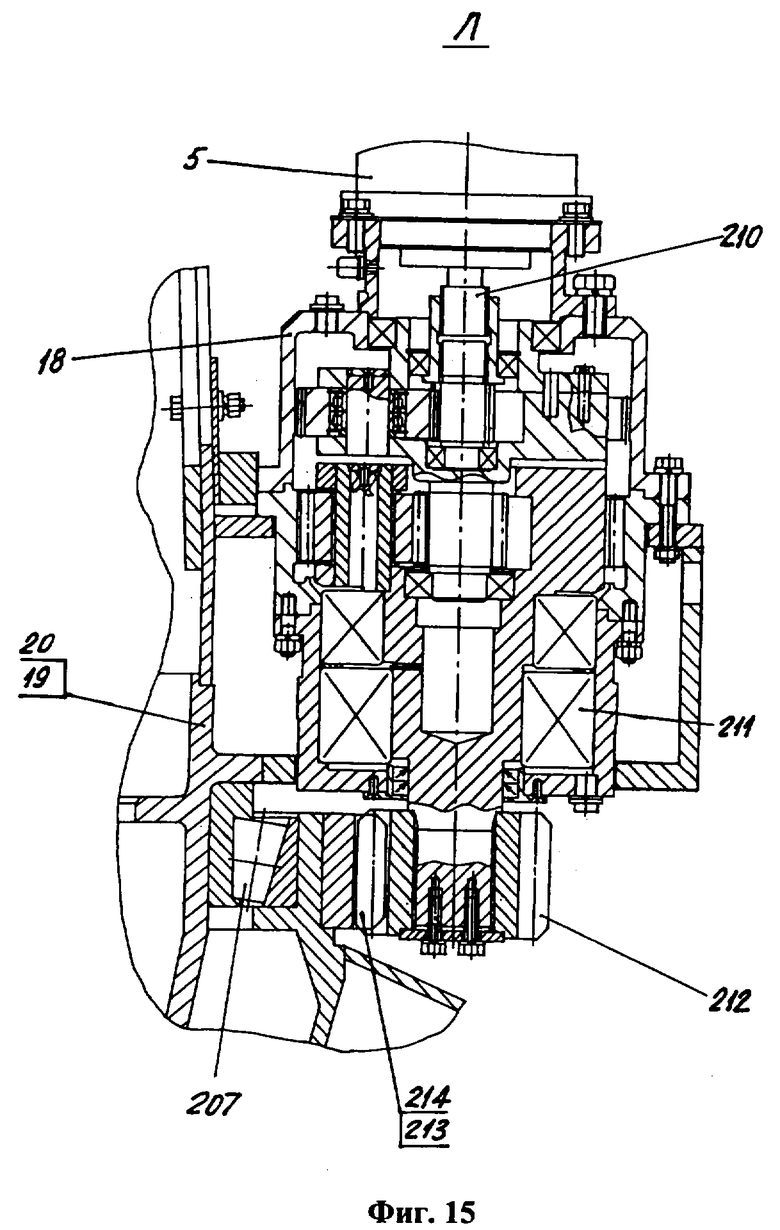
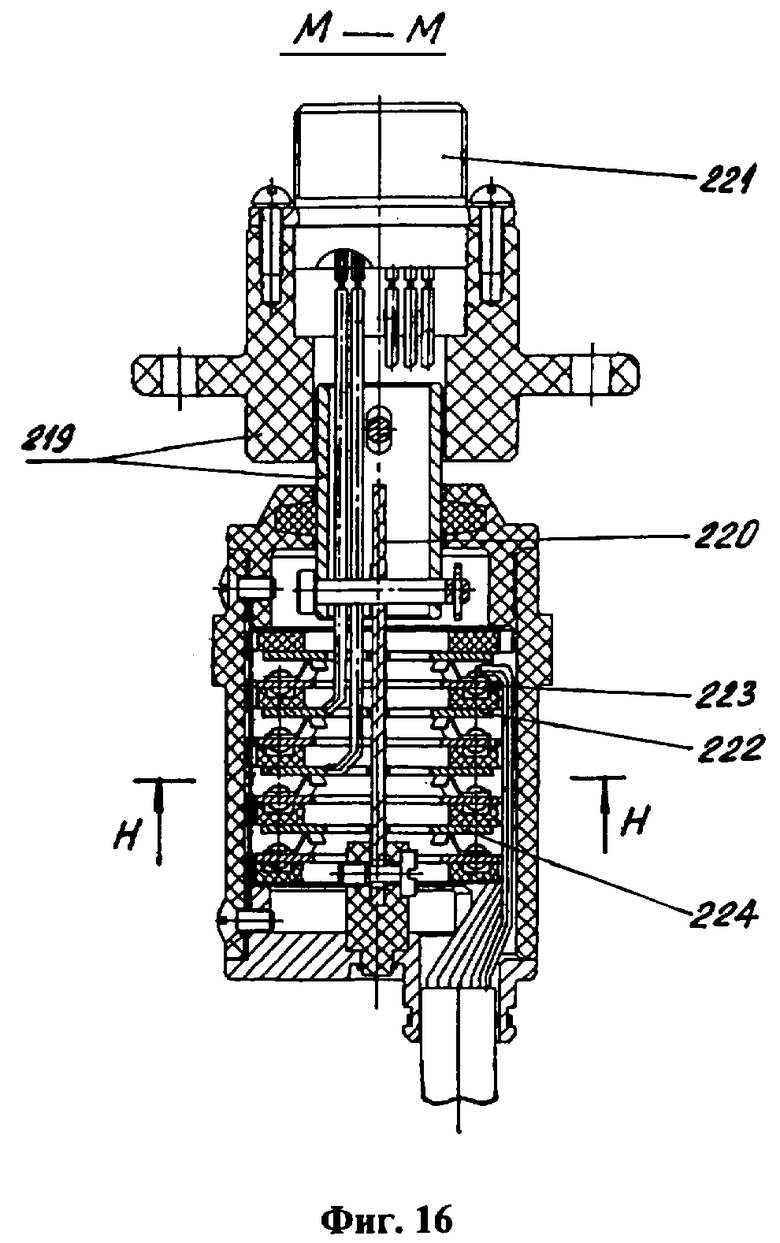
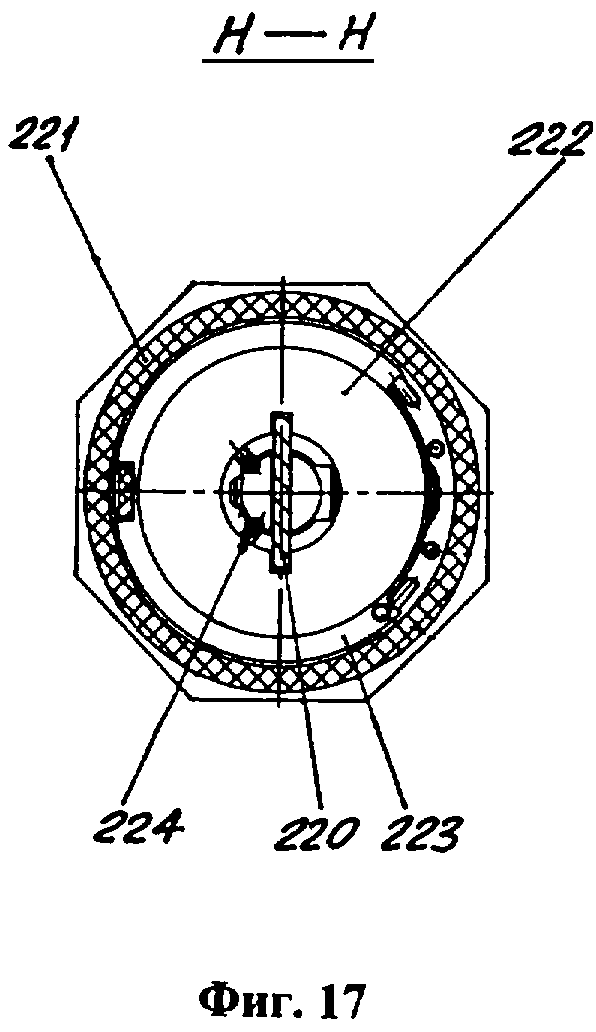


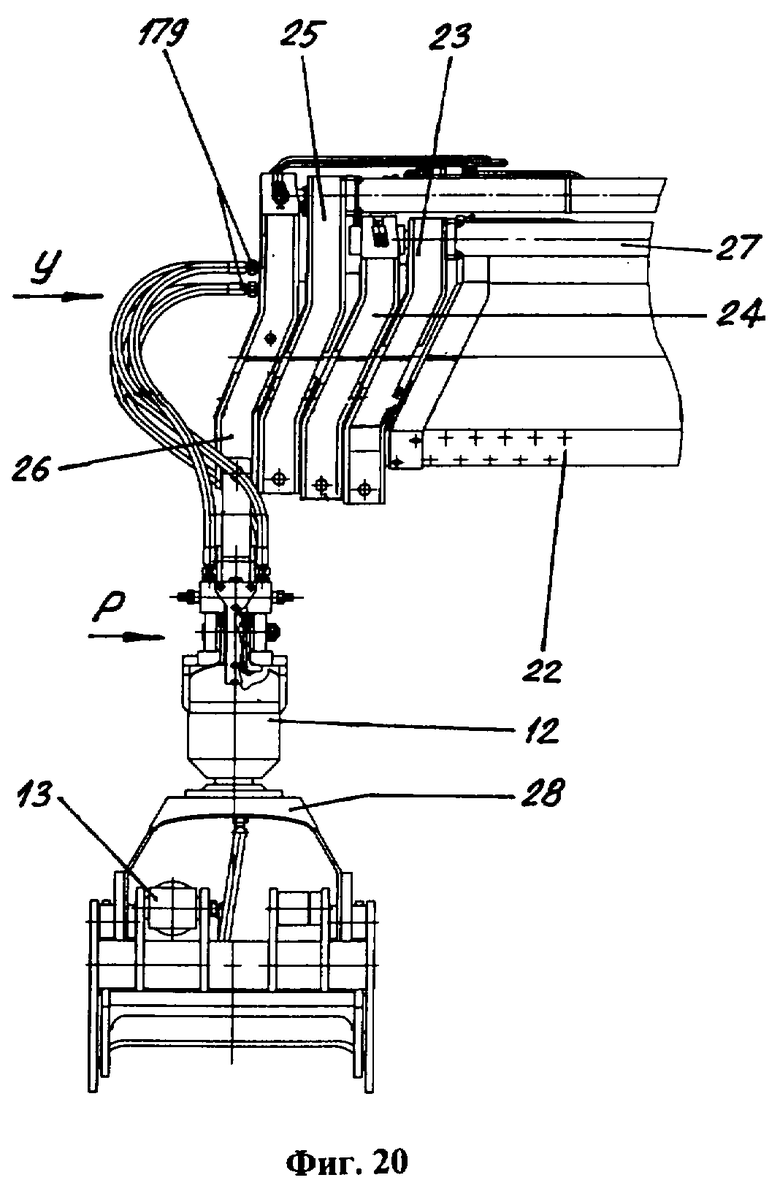
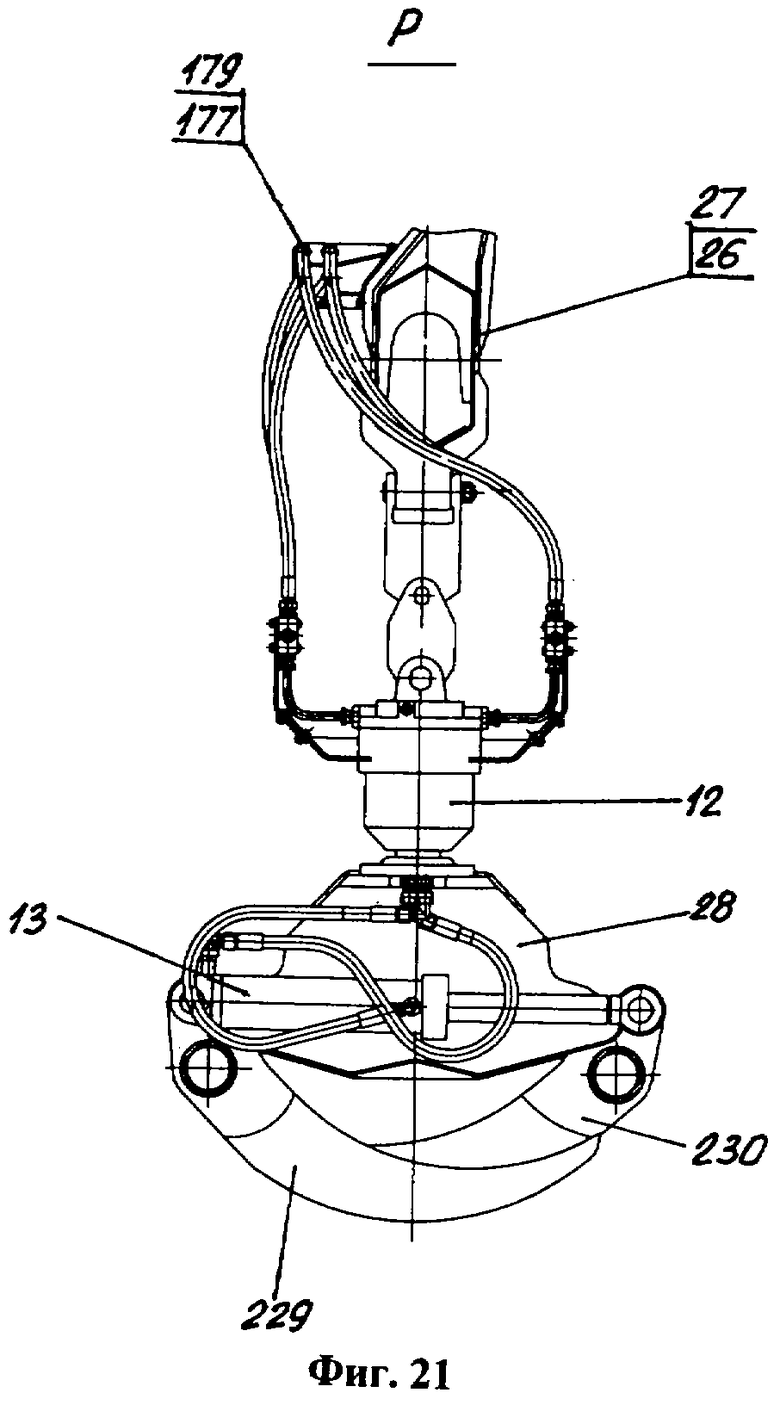
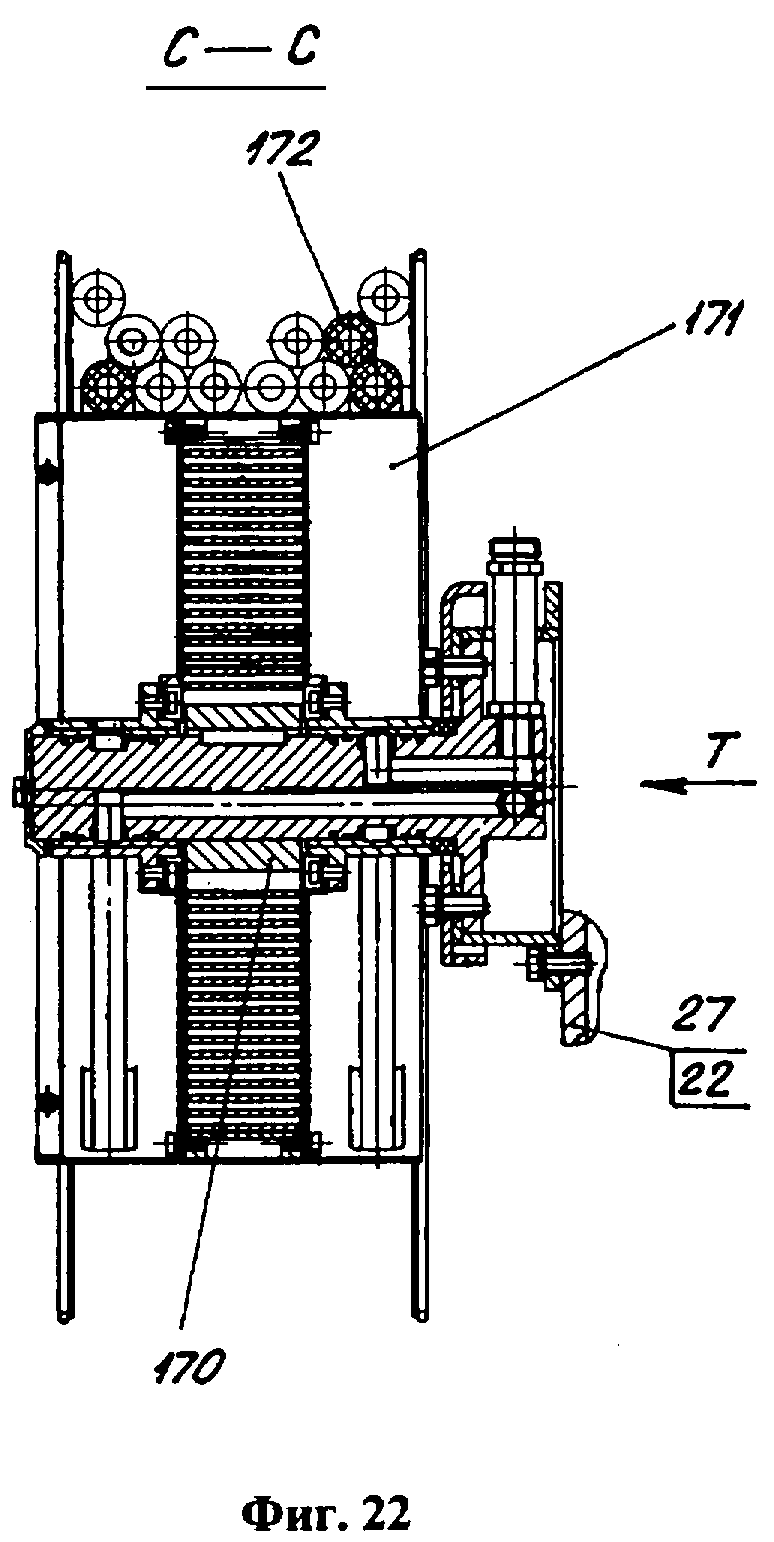



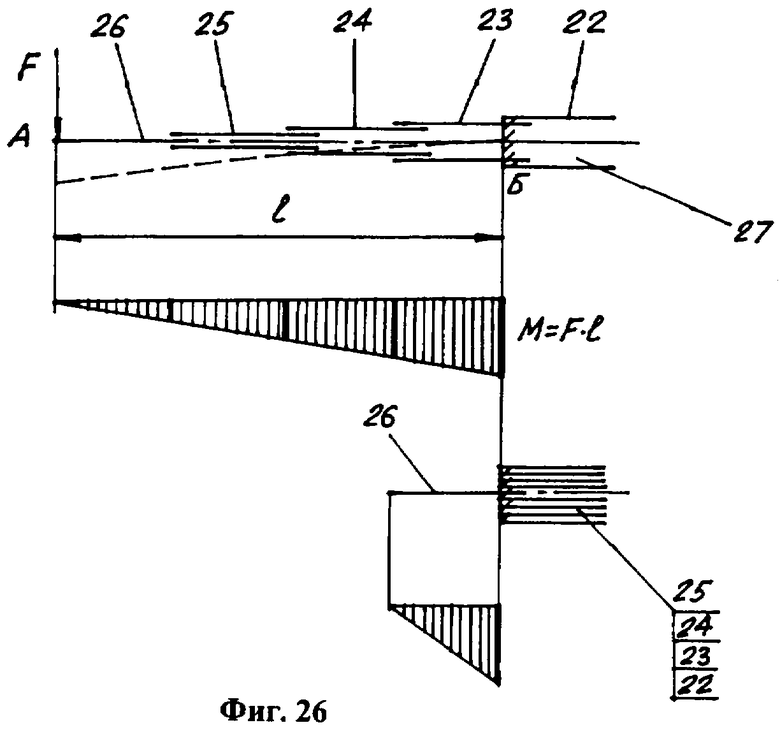
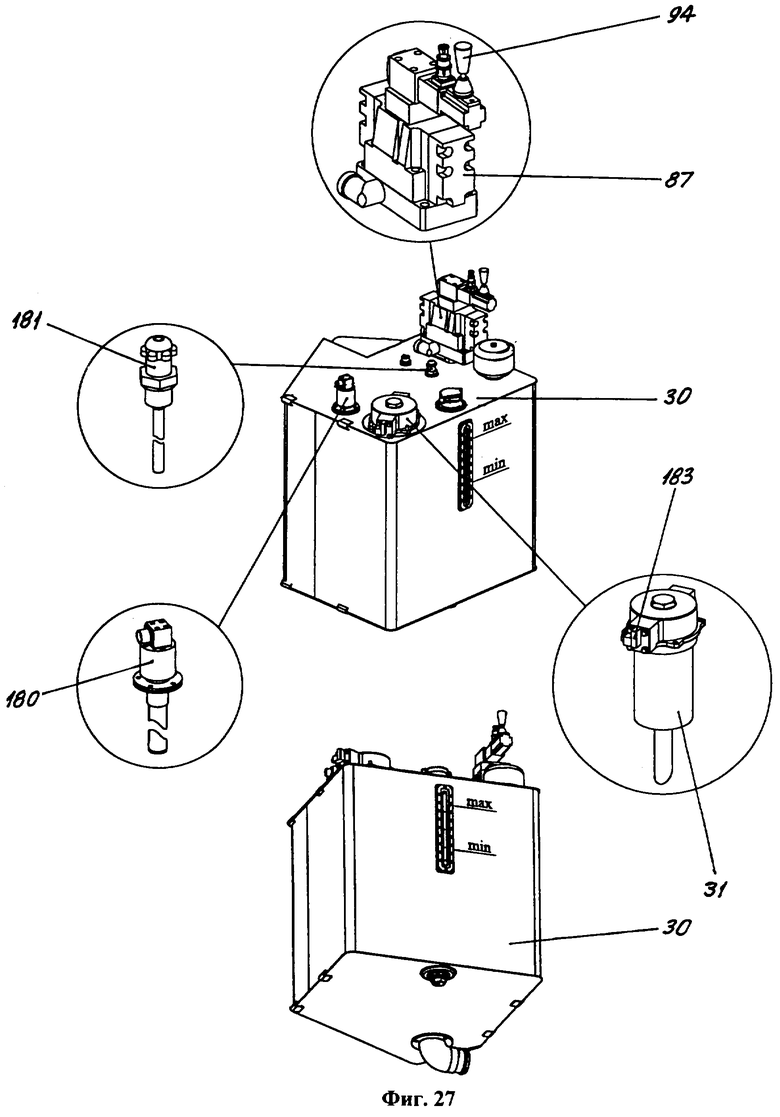
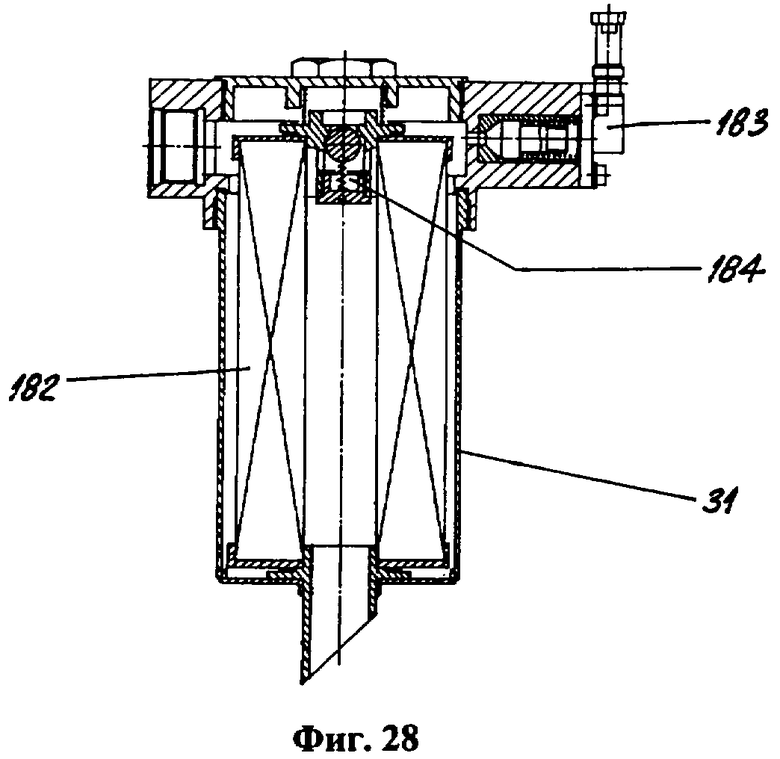
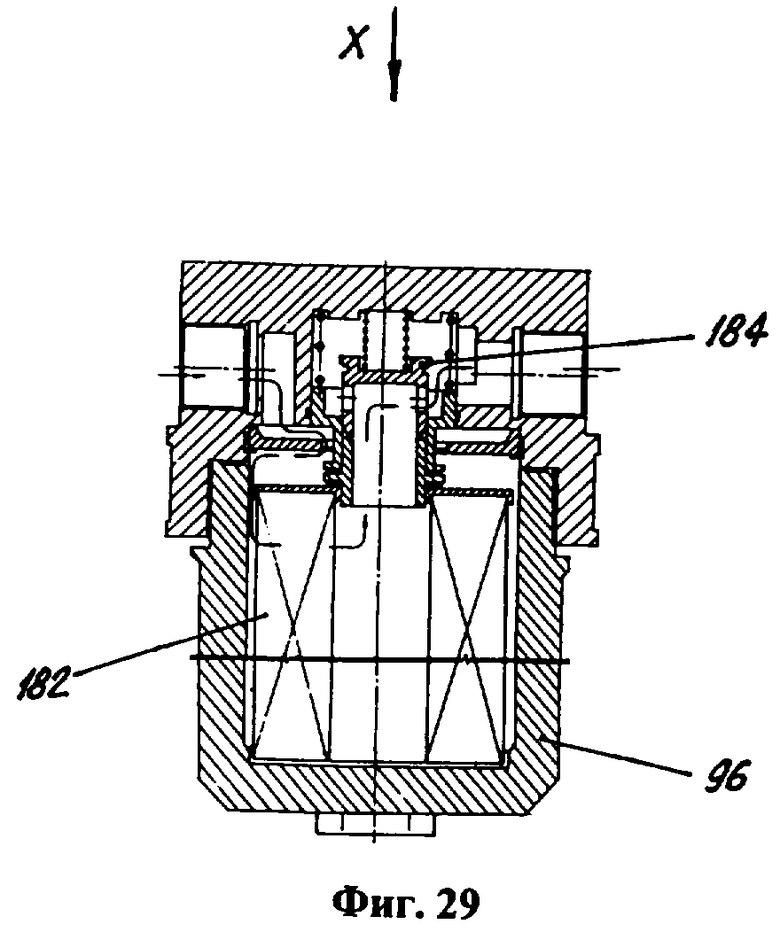
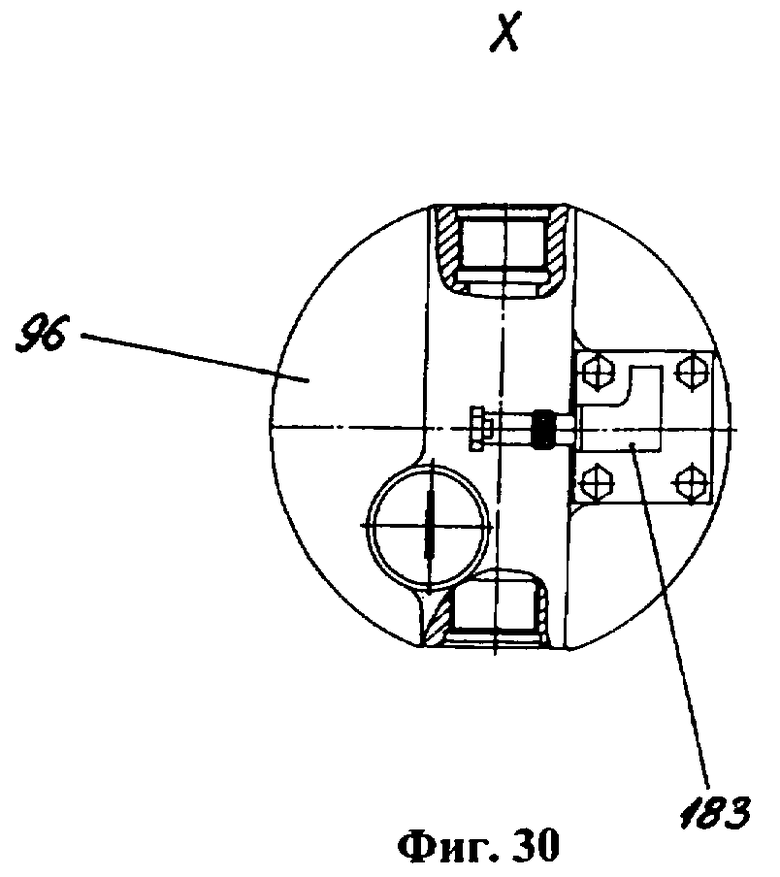

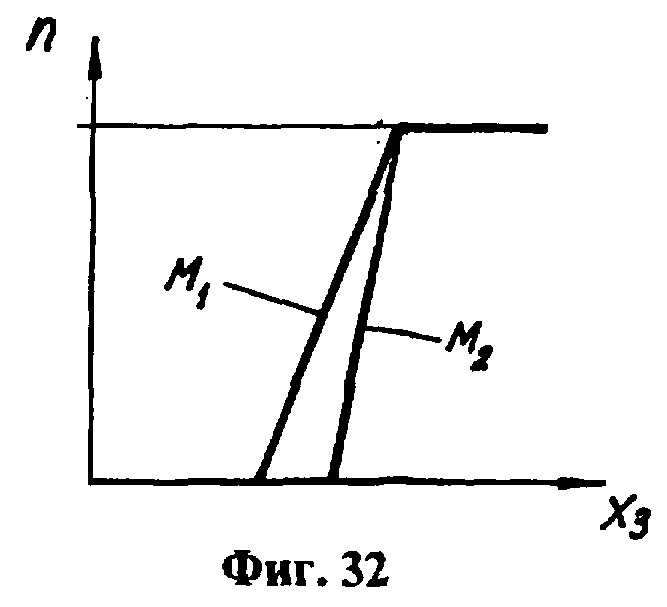
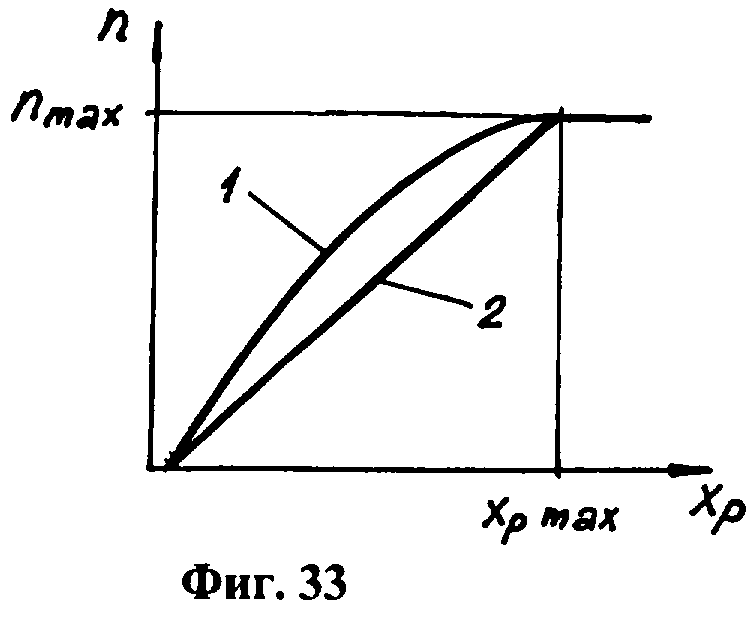
Изобретение относится к гидросистемам крано-манипуляторных установок и других грузоподъемных машин. Гидросистема содержит выполненные в виде гидродвигателей исполнительные органы привода соответствующих механизмов крано-манипуляторной установки, насос, бак со сливным фильтром очистки рабочей жидкости, электрогидравлическую распределительную, а также защитно-предохранительную и регулирующую аппаратуру с соответствующими гидравлическими соединительными магистралями, двухконтурный ограничитель грузоподъемности и систему управления с кабелями. Насос гидросистемы выполнен регулируемым с возможностью бесступенчатого изменения мощности и снабжен чувствительным к нагрузке блоком поддержания постоянного перепада давления между выходом насоса и напорным трубопроводом наиболее нагруженного исполнительного органа, а управляющий исполнительными органами привода механизмов упомянутой выше установки основной распределитель - в виде чувствительного к нагрузке электрогидравлического распределительного модуля секционного типа. Гидросистема выполнена с возможностью форсирования грузоподъемности крано-манипуляторной установки. В ней оптимизированы схемно-компоновочные и другие технические решения, а также система дистанционного управления гидроприводом. Технический результат заключается в улучшении технико-эксплуатационных и других характеристик гидросистемы. 2 з.п. ф-лы, 33 ил.
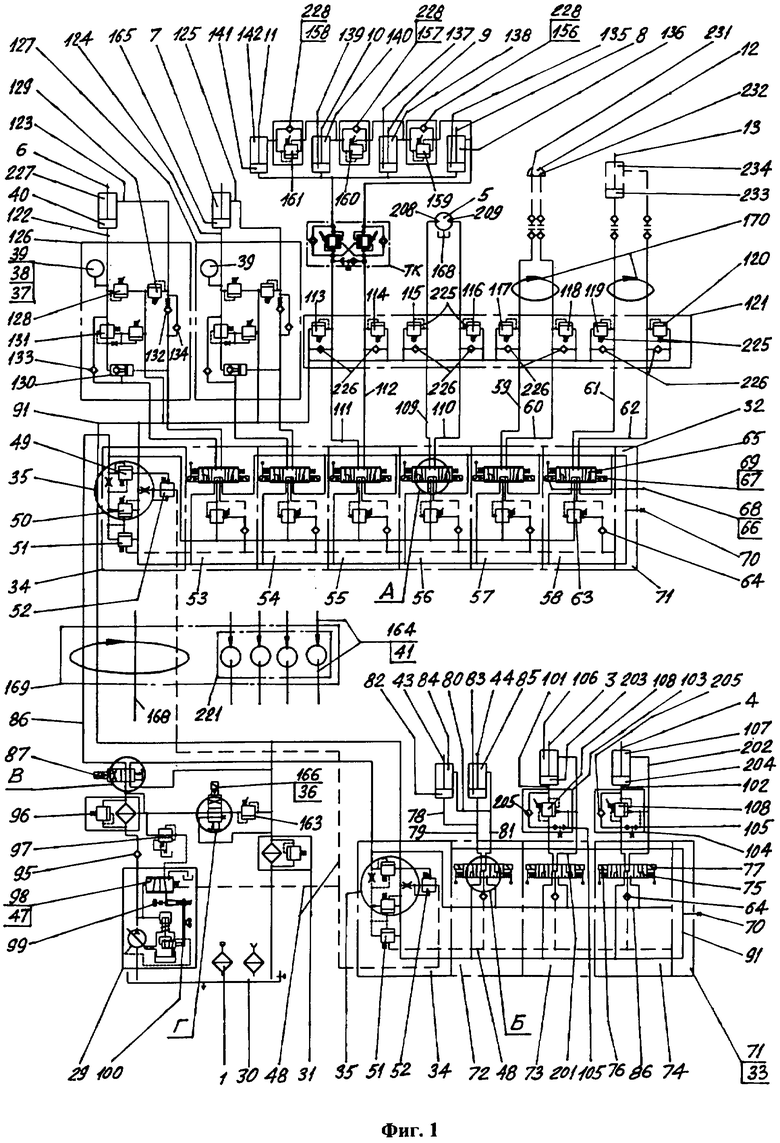
| ШИШКОВ Н.А | |||
| Пособия для операторов (машинистов) по безопасной эксплуатации кранов-манипуляторов | |||
| - М.: НПО ОБТ, 1995, с.40-46 | |||
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Гидропривод механизма поворота стрелового крана | 1978 |
|
SU704889A1 |

