ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в общем, к погрузочно-разгрузочным транспортным средствам, более конкретно - к системам и способам интеграции вспомогательных беспроводных систем дистанционного управления с погрузочно-разгрузочными транспортными средствами для улучшения их эксплуатации.
УРОВЕНЬ ТЕХНИКИ
Подъемники-загрузчики низкого уровня обычно используются для загрузки-разгрузки и перемещения материалов на складах и распределительных центрах. Такие подъемники-загрузчики обычно включают в себя вилочный захват (грузовые вилы), приводной узел, и площадку, на которую поднимается и едет оператор, управляющий подъемником-загрузчиком (погрузчиком). Приводной узел имеет рулевое колесо и соответствующие механизмы регулирования тяги и управления направлением движения, например, шарнирный рычаг рулевого управления, соединенный с рулевым колесом. Ручка управления, присоединенная к рычагу рулевого управления, обычно включает в себя органы управления, необходимые для эксплуатации подъемника-загрузчика, например, рабочие органы управления подъемом и опусканием вил, контроля скорости и направления (вперед и назад) движения подъемника-загрузчика.
В ходе обычной процедуры отбора имущества (комплектования) оператор выполняет сбор заказов из имеющихся изделий, расположенных в зонах хранения по обеим сторонам множества (большого числа) проходов склада или распределительного центра. Оператор ведет подъемник-загрузчик низкого уровня к первому месту подбора товаров(ов) для первого заказа. В процессе подбора оператор забирает заказанный товар(ы) из соответствующих мест(а) хранения, и размещает подобранные товары на поддоне, в комплектовочный контейнер, или в иную вспомогательную конструкцию, перемещаемую на вилах подъемника-загрузчика. Затем оператор перемещает подъемник-загрузчик к следующему месту подбора товаров(ов). Вышеописанный процесс повторяется до сбора всех товаром по заказу(ам).
Обычно оператор поднимается на площадку подъемника-загрузчика и едет на нем, если расстояние между последовательными местами выборки превышает, например, двадцать или более футов (около 6,1 метров). Если расстояние между последовательными местами выборки по маршруту короткое, оператор идет рядом с подъемником-загрузчиком. Соответственно, некоторые подъемники-загрузчики имеют толчковые переключатели, расположенные на подъемнике-загрузчике рядом с вилами и/или на рукоятке управления, или рядом с ним. Оператор, идущий рядом с подъемником-загрузчиком, может использовать толчковые переключатели, чтобы увеличить его скорость до скорости пешехода, обычно от около 1,6 миль в час (3,3 километра в час) до около 3,5 миль в час (5,6 километров в час), для передвижения от одной точки подбора товаров к другой без необходимости подниматься на платформу подъемника-загрузчика. Однако для этого оператору приходится прерывать подбор для перемещения подъемника-загрузчика в другое место. Поэтому для того, чтобы иметь возможность работать с толчковыми переключателями, оператору может понадобиться выйти из желаемой рабочей области, либо изменить желаемый рабочий маршрут.
Нередко оператору необходимо повторять процесс подбора для одного заказа несколько сотен раз. Кроме того, оператору может потребоваться скомплектовать несколько заказов за смену. Соответственно, оператору может понадобиться большое количество времени для перемещения подъемника-загрузчика, что уменьшает время на подборку товаров.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Первым аспектом настоящего изобретения является беспроводное устройство дистанционного управления, обеспечивающее беспроводную передачу сигнала запроса перемещения погрузочно-разгрузочного транспортного средства. Устройство дистанционного управления содержит несущую конструкцию, приспособленную для закрепления на запястье или руке оператора, радиопередатчик, совмещенный с несущей конструкцией, и систему управления. Система управления находится в связи с радиопередатчиком, и настроена таким образом, чтобы при ее задействовании оператором, радиопередатчик генерировал сигнал первого типа погрузочно-разгрузочному транспортному средству.
Система управления может состоять из жесткой несущей конструкции, приспособленной для крепления по меньшей мере на одном пальце оператора.
Несущая конструкция может содержать ремень крепления, приспособленный для крепления на запястье или руке оператора.
Радиопередатчик может присоединяться с возможностью съема к системе управлени.
Устройство дистанционного управления может дополнительно включать в себя провод между радиопередатчиком и системой управления, причем гибкий провод обеспечивает электросвязь между системой управления и радиопередатчиком.
Радиопередатчик может быть в беспроводной связи (радиосвязи) с системой управления.
Сигнал первого типа может включать сигнал запроса на перемещение.
Система управления может быть задействована оператором таким образом, чтобы радиопередатчик генерировал сигнал второго типа, содержащий сигнал остановки в случае приема сигнала второго типа, чтобы остановить погрузочно-разгрузочное транспортное средство, если оно движется с использованием беспроводного дистанционного управления.
Система управления может быть затребована двойным нажатием оператора, чтобы заставить радиопередатчик генерировать сигнал первого типа, и система управления может быть затребована одним нажатием оператора, чтобы заставить радиопередатчик генерировать сигнал второго типа.
Чтобы выполнить сигнал запроса на перемещение погрузочно-разгрузочного транспортного средства, может потребоваться большое число экземпляров сигнала первого типа.
При отсутствии действий, связанных с транспортным средством в течение заданного времени, система управления может быть затребована оператором двойным нажатием, чтобы заставить погрузочно-разгрузочное транспортное средство выполнить сигнал запроса на перемещение.
Для первой радиокоманды, запрошенной после того как оператор сошел с погрузочно-разгрузочного транспортного средства, система управления может быть затребована оператором двойным нажатием для выполнения погрузочно-разгрузочным транспортным средством сигнала запроса на перемещение.
Однократное задействование системы управления оператором может вызывать единичный экземпляр сигнала первого типа, передаваемого радиопередатчиком погрузочно-разгрузочному транспортному средству, а двукратное задействование системы управления оператором может вызывать двойной экземпляр, сигнала первого типа, передаваемого радиопередатчиком на погрузочно-разгрузочное транспортное средство. При получении единичного экземпляра сигнала первого типа погрузочно-разгрузочное транспортное средство выполняет функцию остановки, при получении двойного экземпляра сигнала первого типа погрузочно-разгрузочное транспортное средство выполняет функцию перемещения.
Однократное задействование системы управления оператором вызывает единичный экземпляр сигнала первого типа, который передается радиопередатчиком на погрузочно-разгрузочное транспортное средство, а двукратное задействование системы управления оператором вызывает двойной экземпляр сигнала первого типа, который передается радиопередатчиком на погрузочно-разгрузочное транспортное средство. Если погрузочно-разгрузочное транспортное средство перемещается с дистанционным беспроводным управлением, после получения экземпляров сигналов первого типа, оно выполнит функцию остановки в случае получения единичного или двойного экземпляра сигнала первого типа. Если погрузочно-разгрузочное транспортное средство остановлено после получения экземпляров сигналов первого типа, оно выполнит функцию движения в случае получения двойного экземпляра сигнала первого типа и может не выполнять функцию движения, если получен единичный экземпляр единичного сигнала первого типа.
Устройство дистанционного управления может также включать в себя блок питания для электропитания устройства дистанционного управления.
Согласно второму аспекту настоящего изобретения, погрузочно-разгрузочное транспортное средство может включать в себя приводной узел, грузозахватный узел, по меньшей мере один первый детектор (индикатор) препятствий, и по меньшей мере один второй детектор препятствий. По меньшей мере один первый детектор препятствий установлен в первой позиции на приводном узле для детектирования объекта, расположенного вдоль пути следования приводного узла вне недетектируемой зоны первого детектора. По меньшей мере один второй детектор препятствия установлен во второй позиции на приводном узле, на расстоянии от первой позиции в вертикальном направлении, и служит для детектирования объекта, находящегося вне зоны детектирования первого детектора.
По меньшей мере один первый детектор препятствия может включать лазерный датчик обнаружения (препятствия).
Лазерный датчик обнаружения способен детектировать объект в первой, второй, и третей зонах, первая и третья зоны включают в себя буферные зоны направлений, служащие для выполнения маневров коррекции направления, а вторая зона включает в себя зону остановки для остановки транспортного средства.
По меньшей мере один второй детектор препятствия может включать в себя первый и второй датчики координатного лазера, разделенные друг от друга расстоянием в горизонтальной плоскости.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Последующее описание предпочтительных вариантов осуществления настоящего изобретения будет более понятно при рассмотрении совместно со следующими чертежами, в которых одинаковый элемент системы обозначен одной и той же ссылочной позициями, и на которых изображено:
фиг.1 - вид в перспективе подъемника-загрузчика низкого уровня согласно различным вариантам осуществления настоящего изобретения,
фиг.2 - блок-схема, иллюстрирующая характерную (типичную) систему дистанционного управления функциями перемещения, управления, и/или торможения подъемника-загрузчика показанного на фиг.1, в соответствии с командами дистанционного управления, передаваемыми по радио в соответствии с различными вариантами осуществления настоящего изобретения?
фиг.3 - схематическое изображение подъемника-загрузчика в проходе склада в соответствии с различными вариантами осуществления настоящего изобретения,
фиг.4 - схематическое изображение подъемника-загрузчика в конце примерного типичного прохода склада, иллюстрирующее нерабочую зонув соответствии с различными вариантами осуществления настоящего изобретения,
фиг.5 - блок-схема, иллюстрирующая примерный процесс принятия решения контролером подъемника-загрузчика на фиг.1 в соответствии с различными вариантами осуществления настоящего изобретения,
фиг.6 - иллюстрирует пример устройства дистанционного управления в соответствии с различными аспектами настоящего изобретения,
фиг.7A и 7B - иллюстрируют компоненты присоединяемого (элементы) устройства связи, который стыкуется с к соответствующей конструкции в соответствии с различными аспектами настоящего изобретения,
фиг.8A и 8B - иллюстрируют устройство связи, надеваемого оператором в соответствии с различными аспектами настоящего изобретения;
фиг.9 - блок-схема, иллюстрирующая способ сопряжения дистанционного радиопередатчика с приемником на подъемнике-загрузчике в соответствии с различными аспектами настоящего изобретения;
фиг.10 - блок-схема, иллюстрирующая пример способа сопряжения дистанционного радиопередатчика с приемником на подъемника-загрузчика в соответствии с различными аспектами настоящего изобретения;
фиг.11 - блок-схема, иллюстрирующая пример способа временного отключения электропитания подъемника-загрузчика при помощи приемника, сопряженного с дистанционным радиопередатчиком в соответствии с различными аспектами настоящего изобретения;
фиг.12 - блок-схема, иллюстрирующая пример способа прекращения сопряжения между приемником и дистанционным радиопередатчиком в соответствии с различными аспектами настоящего изобретения,
фиг.13 - схематическое изображение примера устройства дистанционного управления, надеваемого на запястье (руке) оператора,
фиг.14 - схематическое изображение части устройства дистанционного управления, на фиг.13, надетого на руку оператора, когда оператор не использует рабочие органы управления устройства дистанционного управления,
фиг.15 - схематическое изображение устройства дистанционного управления, изображенного на Фиг.13, надетого на руку оператора, когда оператор использует органы управления устройства дистанционного управления,
фиг.15A - схематическое изображение альтернативного варианта конфигурации (расположения) кнопки на устройстве дистанционного управления, надеваемого на запястье (руке),
фиг.16 - схематическое изображение устройства дистанционного управления, на фиг.13, надетого на руку оператора, когда оператор несет коробку (упаковку) в обеих руках,
фиг.17 - вид сбоку примера области управления другого примера устройства дистанционного управления,
фиг.18 - вид в перспективе области управления устройства дистанционного управления на фиг.17,
фиг.19A - вид в перспективе области управления другого примера устройства дистанционного управления, носимого оператором,
фиг.19B - вид в перспективе устройства дистанционного управления, включающего область управления на фиг.19A, иллюстрирующий в собранном виде область управления и передатчик,
фиг.19C - вид сверху устройства дистанционного управления на фиг.19B,
фиг.19D - вид сверху, показывающий устройство дистанционного управления на фиг.19B с областью управления, отделенной от передатчика посредством их связи через соединительный кабель,
фиг.20 - вид сбоку области управления устройства дистанционного управления на фиг.19B-19D, иллюстрирующий способ крепления области управления при помощи держателя-клипсы с защелкой,
фиг.21A - вид в перспективе части еще одного примера устройства дистанционного управления, надеваемого оператором,
фиг.21B - вид в перспективе области управления устройства дистанционного управления на фиг.21A, подсоединенного к передатчику устройства дистанционного управления,
фиг.22A - вид сбоку другого примера устройства дистанционного управления, надеваемого оператором,
фиг.22B - вид в перспективе устройства дистанционного управления на фиг.22A,
фиг.23 - иллюстрация еще одного примера устройства дистанционного управления, надеваемого на запястье оператора;
фиг.24 - иллюстрация еще одного примерного устройства дистанционного управления, надеваемого на запястье оператора,
фиг.25A - иллюстрация еще одного примера устройства дистанционного управления, надеваемого на руку оператора,
фиг.25B - иллюстрация устройства дистанционного управления на фиг.25A, когда оператор нажимает на кнопку,
фиг.25C - схематический вид сбоку устройства дистанционного управления на фиг.25A, показывающий кнопку, имеющую первый контактный элемент и второй контактный элемент,
фиг.26-28 - иллюстрации дополнительного устройства дистанционного управления, которое приспосабливается для ношения на запястье (руке) оператора;
фиг.29-30 - виды сбоку и сверху погрузочно-разгрузочного транспортного средства в соответствии с еще одним вариантом осуществления настоящего изобретения.
МЕТОДЫ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Следующее подробное описание иллюстрированных вариантов осуществления изобретения содержит ссылки на сопроводительные чертежи, которые являются его частью, и которые показывают путем иллюстрирования, но не ограничения, конкретные варианты осуществления изобретения. Следует понимать, что могут быть использованы иные варианты осуществления и могут быть внесены изменения, не выходящие за пределы сущности и объема различных вариантов осуществления настоящего изобретения.
Различные аспекты настоящего изобретения относятся к системам беспроводного дистанционного управления, которые включают в себя устройство дистанционного управления, носимое, или иным образом крепящееся к оператору для беспроводного дистанционного управления работой (функциями) погрузочно-разгрузочного транспортного средства, например, погрузчика. Кроме того, различные аспекты настоящего изобретения относятся к системам, предусмотренным на погрузочно-разгрузочном транспортном средстве, реагирующим на радиокоманды устройства дистанционного управления. Кроме того описаны процедуры синхронизации и эксплуатации, служащие для обеспечения взаимодействия пользователя и беспроводного дистанционного управления погрузочно-разгрузочного транспортного средства в соответствии с различными аспектами настоящего изобретения.
Как видно из чертежей, в частности, на фиг.1, погрузочно-разгрузочное транспортное средство, представленное как подъемник-загрузчик низкого уровня 10 включает в себя, в общем, грузозахватный узел 12, выступающий из приводного узла 14. Грузозахватный узел 12 включает в себя пару вил 16, при этом каждая вила 16 имеет грузонесущий колесный узел 18. Грузозахватный узел 12 может включать в себя иные грузозахватные средства в дополнение к, или вместо, показанной конструкции вил 16, например, решетку ограждения груза, подъемные вилы ножничного типа, выдвижные и отдельно регулируемые по высоте вилами, мачту, грузовую платформу, комплектовочный контейнер, или иные опорные конструкции, устанавливаемые на вилы 16, или иным образом предусмотренные для погрузки-разгрузки грузов, поддерживаемых и перевозимых подъемником-загрузчиком 10.
Показанный 1 приводной узел 14 включает в себя зону 30 оператора, имеющую первую краевую зону 32, расположенную напротив вил 16, вторую краевую зону 34, расположенную рядом с вилами 16, и проходное рабочее место 36 оператора, разделяющую первую краевую зону 32 и вторую краевую зону 34. Первая рабочая зона расположена у первой краевой зоны 32 приводного узла 14, и включает в себя зону 40 управления перемещением подъемника-загрузчика 10 и управления функциями грузозахватного узла 12. Первая краевая зона 32 может также дополнительно включать в себя первое место 46 хранения, например инструментов для затяжки и ослабления крепежа, которые могут потребоваться оператору подъемника-загрузчика, чтобы следить за ним.
Первая краевая зона 32 также определяет отсек 48 для размещения аккумуляторной батареи, управляющей электроники, и двигателя(ей), например, тягового двигателя, двигателя рулевого управления, и двигателя подъема вил (не показаны на иллюстрации).
Как показано для иллюстрации, но не для ограничения, зона управления 40 включает в себя рукоятку 52 для управления направлением движения подъемника-загрузчика 10, которая может включать в себя элементы управления, такие, как рукоятки, дроссельные переключатели, дисковые переключатели, тумблеры, маховичок, штурвальчик управления, и т.п., предназначенные для управления разгоном/торможением и направлением движения подъемника-загрузчика 10. Например, как показано, орган управления как, например, рукоятка-переключатель 54 может быть предусмотрена на рукоятке 52, которая установлена пружиной в центральное нейтральное положение. Поворот рукоятки-переключателя 54 вперед и вверх приведет к перемещению подъемника-загрузчика 10 вперед, т.е. приводным узлом 14 первым, со скоростью, пропорциональной величине поворота рукоятки-переключателя 54. Аналогично, поворот рукоятки-переключателя 54 назад и вниз приведет к перемещению подъемника-загрузчика 10 назад, т.е. вил 16 первым, со скоростью, пропорциональной величине поворота рукоятки-переключателя 54. Также могут быть установлены устройства подачи звукового сигнала или выполнения иных функций подъемника-загрузчика.
Проходное рабочее место 36 имеет площадку 56, на которой может стоять оператор при управлении перемещением подъемника-загрузчика 10 и функциями погрузки-разгрузки подъемника-загрузчика 10. Также могут быть установлены датчики присутствия 58, например на, над или под днищем площадки 56, или в ином месте, предусмотренным около рабочего места 36, для детектирования нахождения оператора на подъемнике-загрузчике 10, как подробно описывается далее. На примере подъемника-загрузчика, показанном на фиг.1, датчики присутствия 58 показаны пунктирными линиями, обозначающими их размещение под площадкой 56. В данной конструкции датчики присутствия 58 могут быть в виде датчиков нагрузок, выключателями и т.п. Как другой вариант, датчики присутствия могут быть реализованы над площадкой 56, например, с использованием ультразвуковой, емкостной, или иной подходящей технологии детектирования.
Вторая краевая зона 34 приводного узла 14 может включать в себя сиденье оператора или другую подходящую опорную конструкцию, поручень 62, и второе место хранения 64. Антенна 66 служит для приема сигналов управления от соответствующего устройства 70 дистанционного управления, которое в одном из вариантов осуществления включает в себя передатчик, блок питания, и систему управления, подробно описываемые далее. Как показано, работа в диапазоне радиочастот обеспечивается посредством подсоединением антенны 66 ко второй краевой зоне 34 приводного узла 14, например, вдоль или иным образом вблизи с вертикально выступающей стойкой 67, которая также может поддерживать источник света 68. Размещение антенны 66 над источником света 68 на стойке 67 обеспечивает хорошее место для приема радиоволн и может устранить помехи от источника света 68 и подключенной к нему проводке, проложенной возле антенны 66. Как другой вариант, антенна 66 может быть расположена в любом месте подъемника-загрузчика 10. Источник света может служить для получения информации о состоянии подъемника-загрузчика 10 и/или состоянии беспроводной связи (радиосвязи) между надлежащим образом сопряженных устройства беспроводного дистанционного управления и подъемником-загрузчиком. Например, источник света может освещать путь при перемещении подъемника-загрузчика 10 и мигать или включаться в определенном порядке для отображения заданных условий.
Поручень 62 может использоваться оператором в качестве поверхности захвата, например, при входе, выходе или эксплуатации подъемника-загрузчика 10. Кроме того, поручень 62 и другие стойки, напр., дополнительный поручень, расположенный в направлении первой краевой зоны 32 (не показан), могут дополнительно использоваться, например, для поддержки принадлежностей, таких, как сканеры, компьютеры, радиостанции, устройства связи, и иных электронных устройств, осветительных приборов, планшетов, вентиляторов, устройств хранения, и иных вспомогательных принадлежностей, либо других устройств, необходимых для выполнения требуемых задач. Например, поручень 62 или первая краевая зона 34 в целом могут использоваться для установки вспомогательных рабочих органов управления.
Пример подъемника-загрузчика 10 дан для иллюстрации, но не для ограничения. На практике подъемник-загрузчик 10 может быть реализован в других конструкциях, видах, и с другими функциями, например, в виде подъемника поддонов с контролем его торца (конца), включающего в себя рычаг штурвальчика управления, соединенный с рукояткой управления для управления направлением движения. Соответственно, подъемник-загрузчик 10 может иметь системы управления, аналогичные или отличающиеся от систем, показанной на фиг.1.
В дополнение к, или вместо источника света 68, с системой дистанционного управления может быть связан индикатор, например, звуковой, световой, и т.п., подробно описываемый далее. Например, как показано, подъемник-загрузчик 10 может включать в себя индикатор, например, проблесковый маячок 72, изображенный расположенным во второй краевой зоне 34 приводного узла 14 или рядом с ней, и смонтированный относительно низко от поверхности земли. Как возможный вариант, индикатор может быть установлен в любом ином целесообразном месте, например, на сиденье, на вертикальной стойке, как например, у источника света 68, или в ином месте подъемника-загрузчика 10.
Проблесковый маячок 72 может быть настроен на работу по индивидуальной схеме, связанной с работой устройства дистанционного управления. Конкретно, когда подъемник-загрузчик 10 не работает под управлением устройства беспроводного дистанционного управления, схема световой сигнализации отличается от схемы, когда подъемник-загрузчик 10 работает под управлением устройства беспроводного дистанционного управления. Например, проблесковый маячок 72 может выключаться или менять интенсивность свечения, последовательность включения, и т.п., когда подъемник-загрузчик 10 не работает под управлением устройства беспроводного дистанционного управления. Для сравнения, Проблесковый маячок 72 может мигать, когда подъемник-загрузчик 10 не работает под управлением устройства беспроводного дистанционного управления. Скорость, интенсивность, и иные схемы работы могут меняться в зависимости от режимов работы подъемника-загрузчика 10, например, для индикации перемещения, неисправного состояния, и т.п. Как показано на иллюстрациях, освещение 74 проблескового маячка 72 направлено вниз под углом по направлению вил 16. Соответственно, участок света проблескового маячка 72 не создает помех для оператора или других людей, находящихся рядом с подъемником-загрузчиком 10, например, в рабочем проходе, однако он ясно виден оператору и другим людям, находящимся рядом с подъемником-загрузчиком 10.
Подъемник-загрузчик 10 может также включать в себя один или более датчиков 76 объект, установленных по периметру подъемника-загрузчика 10, например, в первой краевой зоне 32 приводного узла 14 и, или по сторонам приводного узла 14. Датчики 76 объекта могут использовать любую подходящую технологию детектирования приближения объекта или касания с объектом, например, ультразвуковые датчики, оптические устройства опознавания, инфракрасные датчики, и т.п. Датчики 76 объектов могут быть реализованы, например, посредством ультразвуковых датчиков Bosch URF6 и соответствующего контроллера.
Датчики 76 объектов могут использоваться для обнаружения наличия объектов в пределах заданной области от приводного узла 14, например, внутри заданной области 78, обозначенной пунктирными линиями. На практике, диапазон каждого датчика 76 объектов может быть различным, а области 78 датчиков детектирования могут перекрываться, или быть расположенными иным образом, в зависимости от конкретного варианта осуществления и выбора технологии детектирования приближения объектов. Например, датчики 76 объектов, расположенные в направлении к передней части приводного узла 14 могут иметь область детектирования около 0-5 футов (0-1,5 метров), а датчики 76 объектов, расположенные по сторонам приводного узла 14 могут иметь область детектирования около 0-2 футов (0-0,6 метров). Кроме того, область детектирования датчиков 76 объектов может регулироваться или иным образом динамически изменяться. Например, область детектирования датчиков 76 объектов может быть отрегулирована с учетом скорости подъемника-загрузчика 10 при движении с беспроводным дистанционным управлением.
Кроме того подъемник-загрузчик 10 может включать в себя один или более датчиков 80 присутствия груза. Датчик(и) 80 присутствия груза могут использовать технологии детектирования приближения или касания, напр., контактный выключатель, датчик давления, ультразвуковой датчик, оптическое устройство опознавания, инфракрасный датчик, или иную подходящую технологию, позволяющую детектировать присутствие подходящей несущей конструкции, напр., поддона, или другой платформы, комплектовочного контейнера (корзины), и т.п. Датчик(и) 80 присутствия груза может быть установлены в передней части приводного узла 14, на сиденье или на иной опорной конструкции, места которых, скорее всего, будут зависеть от применяемой технологии.
Блок-схема 100, приведенная на фиг.2, иллюстрирует систему управления для интегрирования команд управления с подъемником-загрузчиком 10. Антенна 66 подсоединена к приемнику 102, принимает команды от устройства 70 дистанционного управления. Приемник 102 передает полученные команды контроллеру 103, который выполняет соответствующие действия в ответ на полученные команды, например, путем включения реле или иных исполнительных устройств, управляемых при помощи электрических, магнитных, гидравлических, пневматических устройств, и т.п., либо путем обмена информацией с другими элементами подъемника-загрузчика 10. Контроллер 103 может также получать иные входные данные 104 от других источников, таких, как переключатели, АЦП, и другие устройства ввода (данных), имеющихся на подъемнике-загрузчике 10, для определения соответствующего действия в ответ на команды, полученные от устройства дистанционного управления 70.
В одном примере системы устройство дистанционного управления 70 в процессе работы передает по беспроводной связи (радиосвязи) приемнику на подъемнике-загрузчике 10 запрос на перемещение в качестве сигнала первого типа, также называемого в данном документе «сигнал перемещения», или «сигнал движения». Запрос на перемещение используется, чтобы дать команду подъемнику-загрузчику 10 на перемещение или медленное движение в первом направлении. Первое направление может определяться, например, перемещением первым приводного узла 14 подъемника-загрузчика 10, т.е., направлением, при котором вилы 16 сзади. Однако могут быть определены другие направления движения. Кроме того, подъемник-загрузчик 10 может управляться для движения в прямом направлении, либо в предварительно определенным курсом.
Приемник 102 принимает сигнал первого типа и передает его в контроллер 103. Если контроллер 103 определит, что сигнал перемещения является действительным сигналом перемещения, и что текущее состояние подъемника-загрузчика 10 приемлемо (этот вопрос подробно описывается далее), контроллер 103 подает сигнал соответствующей схеме управления конкретного подъемника-загрузчика 10 осуществить перемещение подъемника-загрузчика 10, а затем остановить его. Как более подробно описывается далее, остановка подъемника-загрузчика 10 может осуществляться или по инерции (накатом) до остановки, или и включением тормоза.
В качестве примера, контроллер 103 может быть подключен к системе контроля тяги, обозначенной как контроллер 106 тягового двигателя подъемника-загрузчика 10. После получения сигнала первого типа приемником 102 контроллер выполняет проверку по меньшей мере одного рабочего состояния (режима) транспортного средства для принятия решения о выполнении запроса на перемещение на основании оценки рабочих режимов транспортного средства, и задействования системы контроля тяги для перемещения транспортного средства в случае, если контроллером принято решение о выполнении запроса на перемещение на основании оценки рабочих режимов.
Контроллер 106 тягового двигателя подключен к тяговому двигателю 107, приводящему в движение по меньшей мере одно приводное колесе 108 подъемника-загрузчика 10. Контроллер 103 может обмениваться данными с контроллером 106 тягового двигателя для ограничения скорости подъемника-загрузчика 10 после получения запроса на перемещение от устройства 70 дистанционного управления. Например, скорость перемещения подъемника-загрузчика 10 может быть ограничена обычной скоростью пешехода, т.е., примерно до 2,75 миль в час (4,4 километра в час).
В зоне работы подъемника-загрузчика 10 может наличествовать шумы и/или помехи, например, от других беспроводных систем и систем дистанционного управления. Соответственно приемник 102 либо контроллер 103 может выполнять анализ сигнала с целью различения сигналов перемещения от недействительных сигналов перемещения. Например, контроллер 103 может определить, что приемник 102 выдал сигнал перемещения на неправильной частоте или по неправильному каналу. Кроме того, в запрос на перемещение может быть включен код идентификации оператора и/или код идентификации передатчика, как подробно описано ниже. В этом случае контроллер 103 может быть оперативно настроен для отклика на сигналы, имеющие определенные идентификационные коды, с целью исключения выполнения команд с определенными идентификационными кодами.
Кроме того, может быть детектирован сигнал перемещения с уровнем мощности, который может быть или слишком мощным или слишком слабым, чтобы считать его действительным сигналом. Например, если мощность сигнала слишком велика, это может означать, что оператор находится слишком близко от подъемника-загрузчика 10, чтобы инициировать автоматическое перемещение. Соответственно, если мощность сигнала слишком мала, это может означать, что оператор находится вне установленной области для возможности дистанционного управления.
Дополнительно к этому, контроллер 103 может затребовать сигнал подтверждения или другую двустороннюю связь с от устройством дистанционного управления 70. Например, контроллер 103 может быть соединен с передатчиком 109 на подъемнике-загрузчике 10 для осуществления двухсторонней связи с устройством 70 беспроводного дистанционного управления. При этих или иных подобных условиях контроллер может игнорировать полученный запрос на перемещение, и не выполнять каких-либо действий при отсутствии приемлемого подтверждения по двухсторонней связи. Кроме того, двухсторонняя связь может быть использована для образования сопряжения приемника 102 на подъемнике-загрузчике 10 с соответствующим экземпляром от беспроводного устройства дистанционного управления 70, как будет подробно описано ниже.
Контроллер 103 также может отклонить (забраковать) сигнал перемещения в зависимости от рабочего состояния транспортного средства, относящихся к внешним или эксплуатационным факторам. Например, контроллер 103 может игнорировать другой действительный запрос на перемещения на основании информации, полученной от датчиков 58, 76, 80. Соответственно, датчики 58, 76, 80, и т.п., могут быть связаны с контроллером 103 посредством входных сигналов 104 либо посредством соответствующей сети подъемника-загрузчика, например, по шине 110 сети контроллеров (шине CAN). Любое число приемлемых условий работы также/как другой вариант может быть осуществлено контроллером 103, чтобы выполнить и начать действовать в ответ на принятые сигналы.
Шина 110 CAN предоставляет удобную платформу контроллеру 103 подъемника-загрузчика 10 для связи с любой системой подъемника-загрузчика 10 или модулем, подсоединенным к шине 110 CAN, и для принятия решений о том, как выполнить команды, полученные от устройства 70 дистанционного управления. Кроме того, посредством передатчика 109 на подъемнике-загрузчике 10 релевантная информация, полученная от подъемника-загрузчика 10, может быть передана обратно на устройство 70 дистанционного управления через соответствующий приемник в устройстве 70 дистанционного управления.
Протокол CAN - это удобная сетевая платформа для погрузочно-разгрузочных транспортных средств, так как она не имеет адресации абонентов или узлов сети (терминалов), как в обычной сети. Вместо этого протокол CAN определяет приоритетную систему передаваемых сообщений, где приоритет конкретного сообщения, переданный по шине 110 CAN зависит от соответствующего кода-идентификатора сообщения. Сообщение, передаваемое из первого модуля, может быть принято всеми узлами или модулями, соединенные с шиной 110 CAN. Таким образом, контроллер 103 может принимать «разумные» решения в отношении беспроводного дистанционного управления и/или обмена информацией с соответствующим сопряженным с ним устройством 70 беспроводного дистанционного управления, основанные на любом количестве факторов, состояний, условий, и т.п., которые могут быть переданы по шине 110 CAN.
Альтернативно сеть может включать в себя любую иную систему шин, например, локальная сеть взаимодействия (LIN), локальная сеть транспортного средства (VAN), и т.п., или средств связи, таких как, жгута проводов, шины другого способа распространения сигнала, или других управляющих сетей. Например, различные контроллеры и электронные устройства на подъемнике-загрузчике 10 могут обеспечивать одновременную многоадресную передачу, выполнять одноадресную передачу или иным образом связываться друг с другом.
После подтверждения действительного запроса на перемещение, контроллер 103 взаимодействует с контроллером 106 тягового двигателя, например, по шине 110 CAN или посредством иной системы связи, для осуществления перемещения подъемника-загрузчика 10. В зависимости от конкретного варианта осуществления контроллер 103 может взаимодействовать с контроллером 106 тягового двигателя для осуществления перемещения подъемника-загрузчика 10 на заранее определенное расстояние. Альтернативно контроллер 103 может взаимодействовать с контроллером 106 тягового электродвигателя для осуществления перемещения подъемника-загрузчика 10 в течение некоторого времени в ответ на детектирование и сопровождаемое задействование органа управления на устройстве 70 дистанционного управления. Кроме того, подъемник-загрузчик 10 может быть настроен на осуществление медленного (толчкового) перемещения, пока он получает сигнал управления перемещением. Однако контроллер 103 может быть дополнительно настроен на «ожидание» и приостановку перемещение подъемника-загрузчика 10 при наступлении определенного события, например, в случае превышения заданного интервала времени или дистанции перемещения, вне зависимости от сопровождаемого задействования соответствующего органа управления устройства 70 дистанционного управления. Альтернативно могут использоваться другие системы управления влияющие на область, длительность, скорость перемещения и т.п. подъемника-загрузчика 10 при работе при беспроводном дистанционным управлении, примеры которых будут подробно изложены далее.
Контроллер 103 может также связываться, например, посредством шины 110 CAN или иным образом, с системой управления направлением движения, для изменения направления движения подъемника-загрузчика 10. Например, контроллер 103 может связываться обмениваться информацией с контроллером 112 рулевого управления направлением движения для передачи команд или управления иным образом двигателем 114 рулевого управления иным соответствующим устройством управления, которое также соединяется с приводным колесом(ами) 108 подъемника-загрузчика 10. Например, контроллер 103 может выровнять по прямой подъемник-загрузчик 10, либо корректировать угол поворота подъемника-загрузчика 10 перед или во время беспроводного дистанционного управления, который вызвал рабочее перемещения. По существу, контроллер 103 может осуществить по умолчанию режим работы, при котором подъемник-загрузчик 10 перемещается по прямой или по заранее определенному курсу, когда подъемник-загрузчик 10 перемещается при беспроводном дистанционном управлении в ответ на получение запроса на перемещение. Контроллер (103) может дополнительно ввести ограничение на угол поворота во время выполнения перемещения по сигналу беспроводного устройства дистанционного управления, когда подъемник-загрузчик (10) должен выполнять перемещение в направлении, при котором приводное колесо(а) (108) расположены не прямо. Контроллер 103 может дополнительно наложить ограничение на угол поворота во время операций дистанционного управления, если подъемник-загрузчик 10 не должен перемещаться в направлении, при котором управляемое(мые) колесо(а) 108 стоит не прямо. Например, контроллер 103 может ограничивать угол, под которым подъемник-загрузчик 10 может перемещаться при выполнении дистанционных запросов управляемого перемещения, в диапазоне значений приблизительно от 5 до 10 градусов. Таким образом, в дополнение к толчковому режиму работы тяговым двигателем 107 контроллер 103 также может выравнивать по прямой или иным образом регулировать и управлять приводным колесом 108.
Устройство 70 дистанционного управления также может передавать сигнал второго типа, например «сигнал остановки», означающий, что подъемник-загрузчик 10 надо должен затормозить и/или иным образом остановить. Сигнал второго типа может также подразумеваться после выполнения команды «движение». Сигнал второго типа принимается приемником 102 и передается в контроллер 103. Если контроллер 103 определяет, что «сигнал остановки» является действительным сигналом остановки, контроллер 103 посылает сигнал системе управления тормозами, например, через шину 110 CAN, либо иным образом. Например, контроллер 103 может связаться с контроллером 116 тормозного устройства подъемника-загрузчика 10 для того, чтобы тормозное устройство 117 выполнило остановку подъемника-загрузчика 10. В качестве альтернативы сигналу остановки сигнал второго типа может быть «сигналом движения накатом», означающим, что подъемник-загрузчик 10 будет двигаться накатом до остановки. Например, если сигнал движения накатом распознается контроллером 103 как действительный сигнал движением накатом, то контроллер 103 может отключить привод подъемника-загрузчика 10, давая указание контроллеру тягового двигателя 106 прекратить подачу сигнала на включение тягового двигателя 107, но в другом случае дает возможность подъемнику-загрузчику 10 двигаться накатом и постепенно замедляться до остановки. Контроллер 103 может рассматривать любое число приемлемых условий или факторов для интерпретации и выполнения действий в ответ на принятый сигнал остановки или движения накатом. Кроме того, вместо того чтобы устройство 70 дистанционного управления, передавало сигнал второго типа на запрос, чтобы подъемник-загрузчик 10 выполнил конкретную функцию, устройство 70 дистанционного управления может передавать несколько экземпляров сигналов первого типа, например, если кнопка на устройстве 70 дистанционного управления нажата два раза, что подробно описывается далее.
Время полной остановки подъемника-загрузчика 10 может варьироваться в зависимости от, например, предполагаемого действия, окружающих условий, возможностей конкретного подъемника-загрузчика 10 и прочих подобных факторов. Например, после выполнения толчкового перемещения может понадобиться дать возможность подъемнику-загрузчику 10 «проехать накатом» некоторое расстояние до остановки, с тем, чтобы подъемник-загрузчик 10 останавливался медленно. Это может быть достигнуто при помощи рекуперативного торможения, чтобы замедлять движение подъемника-загрузчика 10 до остановки, таким образом, чтобы до момента окончательной остановки подъемника-загрузчика 10 достигать заранее определенного пройденного расстояния от начала остановки до момента, когда подъемник-загрузчик полностью остановится. Альтернативно процесс торможения может быть применен после заранее определенного времени задержки, что обеспечит перемещение подъемника-загрузчика 10 на некоторое заранее определенное расстояние после начала выполнения торможения. Может также понадобиться остановить подъемник-загрузчик 10 относительно быстрее, например, если на пути движения подъемника-загрузчика 10 был детектирован объект, или если необходима немедленная остановка подъемника-загрузчика 10 после успешного толчкового перемещения. Например, контроллер может обеспечить приложение определенного крутящего момента при торможении. В этих условиях контроллер 103 дает указание контролеру 116 включить тормозное устройство 117 для остановки подъемника-загрузчика 10.
Кроме того, если выполняется функция отключения подъемника-загрузчика, подъемник-загрузчик может быть остановлен с максимальным тормозным моментом. Например, устройство 70 дистанционного управления может иметь систему отключения, которая дает указани подъемнику-загрузчику 10 остановиться и/или отключиться. В ответ на функцию выключения подъемник-загрузчик 10 может также выключить главный контактор 118, служащий для включения питания подъемника-загрузчика 10. При такой схеме работы, подъемник-загрузчик 10 может потребовать операции повторный запуск, например, при помощи ключа зажигания, или иной подходящей конструкции, чтобы снова выполнить процедуру включения подъемника-загрузчика 10. Контроллер 103 может также взаимодействовать с другими выходными данными 119 для выполнения необходимых действий, напр., включения звукового сигнала, источника света, монитора, и т.п. Контроллер 103 может взаимодействовать с различными компонентами подъемника-загрузчика 10, оператором, и с устройством 70 дистанционного управления для выполнения различных алгоритмов перемещения, остановки, остановки накатом, и управления питанием.
Как отмечено выше, контроллер 103 может связываться с контроллером 116 тормозного устройства, для того, чтобы тормозное устройство 117 выполнило остановку подъемника-загрузчика 10 при различных условиях. Например, сигналы от датчиков 76 объектов могут быть блокированы, когда оператор управляет подъемником-загрузчиком 10 напрямую, например, чтобы дать возможность оператору провести подъемник-загрузчик 10 в стесненных местах и на поворотах, где в противном случае сработают один или более датчиков 76 объектов. Однако выходные данные датчиков 76 объектов могут быть действительны и не будут блокироваться, когда присутствие оператора на подъемнике-загрузчик 10 не обнаружено. При этом контроллер 103 может связываться с контроллером 116 тормозного устройства, чтобы остановить подъемник-загрузчик 10, если контроллер 103 определяет, что на пути перемещения подъемника-загрузчика 10 находится объект, например, как обнаруженный датчиками 76 объектов во время перемещения в ответ на получение дистанционного запроса на перемещение от устройства 70 дистанционного управления.
Кроме того, контроллер 103 может отклонить запрос на перемещение после получения сигнала на перемещение от соответствующего устройства 70 дистанционного управления в случае, если датчик(и) 58 присутствия на площадке подъемника-загрузчика детектирует присутствие человека на подъемнике-загрузчике 10, либо если датчики 80 присутствия груза сигнализируют о том, что соответствующая грузовая платформа, например, поддон, не находится на вилах подъемника-загрузчика 10. Кроме того, контроллер 103 может связаться с тормозным устройством 116, чтобы остановить подъемник-загрузчик 10, если датчики 80 присутствия груза детектируют изменение в положении грузовой платформы от действительного заданного положения.
Устройство 70 дистанционного управления, приемник 102, и передатчик 109 могут связываться в некотором диапазоне частот, давая таким образом возможность устройству 70 дистанционного управления и соответствующему подъемнику-загрузчику 10 захватывать частоту или частоты с наименьшими помехами от внешних источников. Кроме того, для облегчения взаимодействия между подъемником-загрузчиком 10 и устройством 70 дистанционного управления может быть использовано любое число беспроводных технологий, включая широкополосные технологии.
Например, для организации связи между передатчиком устройства 70 дистанционного управления и приемником 102 на подъемнике-загрузчике 10 могут быть использованы такие технологии, как Bluetooth или на ее основе. Технология Bluetooth и подобные технологии связи дает возможность дистанционного управления выходной мощностью, регулируемой выходной мощностью, несколькими подканалами и частотой и скачкообразным изменением частоты для снижения вероятности шумов или других помех в рабочей зоне. Использование диапазона частот по технологии Bluetooth также может облегчить передачу голосовых команд, как подробно описано далее.
Если подъемник-загрузчик 10 включает в себя рулевой рычаг вместо описанного рулевого устройства, подъемник-загрузчик 10 может включать в себя тормозной рычаг рулевого устройства. Устройство блокировки рулевого рычага может быть предусмотрен для перевода подъемника-загрузчика 10 в режим перемещения накатом при использованием дистанционного управления, например, как описано в патенте США №6595306, выданного настоящему правопреемнику патентообладателя, и включенному в настоящем документе в виде ссылки.
Изображенное на фиг.3 устройство 70 дистанционного управления и соответствующий приемник 102 могут быть настроены таким образом, чтобы обеспечивать беспроводное управление на определенном расстоянии. Подъемник-загрузчик 10 располагается в типичном проходе 120 склада, имеющем множество складских участков 122 по обеим сторонам прохода 120. Как показано на иллюстрации, устройство 70 дистанционного управления способно устанавливать связь с подъемником-загрузчиком 10 в пределах некоторой области, радиуса 130 перемещения, обозначенного пунктирной линией. В зависимости от исполнения эта область может различаться. Например, рабочая область может зависеть от предполагаемого расстояния, на которое оператор может отходить от подъемника-загрузчика 10 до места подбора товара в процессе комплектования заказов. В описываемом примере это расстояние может составлять 25 футов (7,62 метра). Кроме того, рабочая область не обязательно должна быть одинакова по всем направлениям, или при любых условиях. Например, рабочая область может иметь эллиптическую или иным образом направленную форму, и т.п. В дополнение к этому, возможно наличие минимальной области, в пределах которой беспроводное дистанционного управление может не функционировать. Как описано выше, контроллер 103 может различать сигналы слишком сильные, означающие, что оператор находится или на подъемнике-загрузчике 10, или слишком близко к нему, чтобы дистанционное управление функционировало. Еще как другой пример, на рабочую область также могут влиять рабочие и внешние условия, такие как скорость подъемника-загрузчика 10, когда подъемник-загрузчик 10 находится в помещении, и т.п.
Может понадобиться настроить или иным образом запрограммировать область действия датчиков 76 объектов для целей детектирования препятствий на пути движения подъемника-загрузчика 10, перемещающегося в ответ на получение запроса на перемещение от устройства 70 дистанционного управления. Например, как показано, все датчики 76 объектов настроены на детектирование объектов на пути, и находящихся на некотором расстоянии, что схематично обозначено областью, отмеченной пунктирной линией зоны 78 детектирования рядом с каждым датчиком 76 объектов. Боковые датчики 76 объектов не показаны на фиг.3 в целях ясности описания. Область детектирования датчиков 76 объектов может быть настроена на изменение как статически, так и динамически. Например, область детектирования датчиков 76 объектов может изменяться при изменении скорости подъемника-загрузчика 10 после команд на толчковое перемещение, и т.п.
При каждом задействовании запроса на перемещение на устройстве 70 дистанционного управления, оператор может выполнить перемещение подъемника-загрузчика 10, не теряя времени на физическое использование органов управления подъемника-загрузчика 10. Например, после подачи запроса на перемещение посредством устройства 70 дистанционного управления оператор может перейти к следующему товару (грузу), который надо забрать, либо выполнить какую-либо иную задачу. Подъемник-загрузчик 10 автоматически переместится вперед на расстояние, соответствующее запросу на перемещение. Например, если подана команда на перемещение на заранее определенное расстояние, после перемещения на заданное расстояние подъемник-загрузчик 10 остановится, не требуя отдельного управляющего действия оператора. Альтернативно, подъемник-загрузчик 10 может продолжать движение до тех пор, пока устройство 70 дистанционного управления не передаст команду на толчковое перемещение, например, когда кнопка движения нажата постоянно. В этом случае подъемник-загрузчик 10 продолжает движение до тех пор, пока оператор не отпустит кнопку, т.е. оператор задействует кнопку остановки или движение накатом, и не истечет время максимальной длительности движения, либо какое-либо иное действие не остановит подъемник-загрузчик 10.
В качестве примера первого возможного способа, при котором оператор может взаимодействовать с подъемником-загрузчиком 10, предположим, что оператор движется вместе с подъемником-загрузчиком 10 вдоль прохода 120. Первый ряд 142 мест складирования 122 располагается с первой стороны подъемника-загрузчика 10. Второй ряд 144 мест складирования 122 располагается со второй стороны подъемника-загрузчика 10. Каждый первый 142 и второй 144 ряды мест складирования 122 имеют произвольное количество отдельных зон хранения (тар), которые иметь вид контейнеров, поддонов, ограниченных или иным образом обозначенных зон, и т.п. Кроме того, каждое место складирования 122 может включать в себя несколько независимых вертикально расположенных зон хранения, как, например, в стеллажах склада или распределительного центра. Соответственно, каждое место складирования 122 может иметь несколько уровней хранения. Во время автоматической работы подъемника-загрузчика посредством устройства 70 дистанционного управления подъемник-загрузчик 10 движется вдоль прохода 120. Например, подъемник-загрузчик 10 изображен перемещающимся посредством приводного узла 14 вперед, что показано стрелкой направления 132. Таким образом, вилы 16 направлены назад подъемника-загрузчика 10, работающего под управлением устройства 70 дистанционного управления. Возможна реализация других направлений перемещения.
Примем, что оператор первоначально занимает положение «A», и что необходимо забрать товар (товар), находящийся в месте складирования 122, обозначенном как место складирования «122-1» в ряду 144. Чтобы забрать необходимы товар оператор проходит от положения «А» к месту складирования «122-1». После комплектования (отдбора) необходимых товаров оператор находится в точке «B», находящейся напротив места складирования «122-1». Далее предположим, что оператор переместил или перемещает подъемник-загрузчик 10 при помощи устройства 70 дистанционного управления таким образом, что грузовая платформа 146, расположенная на вилах 16 подъемника-загрузчика 10, находится в положении «C», поблизости от положения «B». При переходе от положения «A» к месту складирования «122-1» оператору нет необходимости переносить товар(ы), необходимый для комплектования заказа, к подъемнику-загрузчику 10. Более того, к моменту, когда оператор подходит к положению «B» с товаром(ами), отобранными на месте складирования «122-1» (или несколько раньше или позднее), подъемник-загрузчик 10 остановится в положении «C». Таким образом, оператору нужно будет лишь перенести товар(ы) только на относительно небольшое расстояние от места складирования «122-1» к положению «B».
После помещения выбранного товара на грузовую платформу 146 подъемника-загрузчика 10 оператор может подняться на подъемник-загрузчик 10 и проехать до следующего места, или в случае, если необходимо выбрать другие товары в этом же проходе 120, оператор может переместить подъемник-загрузчик 10 при помощи устройство 70 дистанционного управления.
В продолжении предыдущего примера, предположим, что оператор теперь находится в положении «B», а товар, который нужно забрать из места складирования 122, обозначенном как «122-2» в ряду 142. Чтобы извлечь (забрать) нужный товар, оператор проходит от положения «B» до места складирования «122-2». Кроме того, оператор инициирует беспроводной дистанционный управляемый запрос на перемещения, например, используя устройство 70 дистанционного управления для беспроводной передачи сигнала первого типа «сигнала движения» передатчику подъемника-загрузчика 10. К моменту, когда оператор подходит к положения «D» с товаром, выбранным в месте складирования «122-2» (или несколько раньше или позднее), подъемник-загрузчик 10 переместился под беспроводным дистанционным управлением от положения «C» и остановился в положении «E», поблизости от положения «D». Как и ранее, оператор помещает взятый выбранный товар на грузовую платформу 146 подъемника-загрузчика 10, при этом минимизируется расстояние, на которое оператору необходимо нести выбранный товар.
Кроме того, перемещая подъемник-загрузчик 10 вперед одновременно с выборкой товара уменьшается время, необходимое для выборки в конкретном проходе 120, так как оператору нет необходимости прерывать процесс выборки для перемещения или изменения положения подъемника-загрузчика 10. Как показано на схеме, однократное задействование управление перемещение на устройстве 70 дистанционного управления заставляет подъемник-загрузчик 10 переместиться на расстояние S1 и затем остановиться. То есть, после задействования управления перемещением посредством устройства 70 дистанционного управления подъемник-загрузчик 10 располагается в подходящем для оператора, чтобы уложить ранее отобранные товары, ранее выбранных оператором, что позволяет минимизировать расстояние, на которое оператору необходимо нести выбранные товары. Более того, так как оператору не нужно прерывать процесс выборки или иные действия, связанные с выполнением работы, оператор экономит силы и время, необходимые для завершения конкретного задания, по сравнению, например, с рабочим процессом, при котором оператору необходимо постоянно останавливать работу для перемещения подъемника-загрузчика на следующее место.
Одним из показателей производительности оператора является время, затрачиваемое им на местах выборки груза. То есть, время, затрачиваемое оператором при комплектовании заказов, по сравнению с временем, затрачиваемым на перемещение подъемника-загрузчика 10 и выполнение иных задач, непосредственно не связанных с поиском и загрузкой товаров. Как видно из описания, приведенного выше, время, необходимое для перемещения подъемника-загрузчика 10 уменьшается, что позволяет оператору затратить больше времени на выборку товаров. Кроме того, возможно дистанционное управление подъемником-загрузчиком 10 с тем, чтобы он постоянно находился перед оператором, что позволяет оператору двигаться по направлению к грузонесущей части подъемника-загрузчика 10. Это минимизирует расстояние, которое оператору необходимо пройти для выборки и погрузки товаров, а также расстояние, на которое оператору необходимо переносить товары. Такая экономия может быть значительной, особенно в случаях, когда вилы 16 подъемника-загрузчика 10 имеют относительно большую длину. Например, некоторые вилы 16 позволяют работать с грузами тройной длины, например, тремя поддонами.
Более того, программное обеспечение системы управления складом, руководящее работой операторов, при планировании комплектования заказов для выполнения операций по отбору товаров, может учитывать дистанционное управления перемещением подъемника-загрузчика 10, чтобы преимущества дистанционного управления еще более усиливаются эффективной компьютерной обработкой заказов.
Как показано на фиг.4, согласно аспекту настоящего изобретения склад или другой складской комплекс, и/или подъемник-загрузчик 10 могут включать в себя дополнительные функции, обеспечивающие улучшенную функциональность. Например, функция дистанционного управления толчковым перемещением может быть отключена в определенных местах в пределах помещения, например, в концах прохода, на перекрестках проходов, в зонах погрузки или приема грузов, областях с интенсивным пешеходным движением, и т.п. Для иллюстрации этой функции предположим необходимость отключения дистанционного управления толчковым перемещением подъемника-загрузчика 10 при его приближении к проходу 120. Для обеспечения отключения дистанционного управления толчковым перемещением подъемника-загрузчика 10 в заданном месте, подъемник-загрузчик 10 включает одно или более устройств 148, таких, как антенны радиочастотной идентификации (RFID). Соответствующие радиометки (150) размещаются в конце пролетов (120) в подходящих положениях.
Устройства 148 генерирую сигналы при детектировании конца пролета, например, путем обнаружения соответствующих радиометок 150, которые переключают подъемник-загрузчик 10 на остановку, если его толчковое перемещение управляется дистанционно. Например, сигналы от устройств 148 могут быть привязаны к соответствующим входам, например, к входов 104 контроллера 103. Например, если контроллер 103 детектирует (регистрирует) соответствующий сигнал от одного из устройств 148, и если контроллер 103 определит, что в данный момент управление подъемником-загрузчиком 10 осуществляется по запросу на перемещение от устройства 70 дистанционного управления, контроллер 103 может подать соответствующую команду контроллеру 116 тормозного устройства на остановку подъемника-загрузчика 10.
На иллюстрации проход 120 имеет ширину 15 футов (около 4,6 метров), а антенны 148 RFID настроены на детектирования соответствующих радиометок 150 в радиусе 13 футов (около 3,9 метров). Это обеспечивает перекрытие зон детектирования в проходе 120, достаточное для детектирования подъемником-загрузчиком 10, и достаточное расстояние для торможения или остановки иным образом примера подъемника-загрузчика 10 при приближении к концу прохода. На практике могут использоваться другие зоны детектирования, которые, кроме того, могут меняться в зависимости, например, от требований к остановке подъемника-загрузчика 10 и соответствующего исполнения устройства дистанционного управления, используемой технологии детектирования, и иных соответствующих факторов.
На фиг.5 представлен блок-схема способа 200 выполнения функции перемещения. Способ 200 может быть осуществлен, например, контроллером 103 подъемника-загрузчика 10. Как описано в данном документе, контроллер 103 может в ответ на запрос на перемещение от устройства 70 дистанционного управления заставить перемещаться подъемник-загрузчик 10 пока не будет выполнено по меньшей мере одно условие. Указанный способ 200 устанавливает различные типовые условия для подъемника-загрузчика 10, которые могут оказать влияние на то, как контроллер 103 интерпретирует запросы на перемещение от устройства 70 дистанционного управления.
Процесс находится в состоянии ожидания получения запроса 202 на перемещение. Если запроса на перемещение не получено, продолжается режим ожидания. При получении запроса на перемещение процесс может выполнить запрос 202 на перемещение, либо выполнить дополнительные проверки или оценки состояния транспортного средства, чтобы определить, подтверждается или нет выполнении запроса на перемещение, примеры которых отмечены как условия 204, 206, 208, и 210.
Например, процесс может требовать, чтобы подъемник-загрузчик был остановлен до распознавания нового запроса на перемещение. Такое условие может быть осуществлено, например, если контролер 103 ограничит максимальное расстояние непрерывного перемещения транспортного средства без остановки во время работы с беспроводным дистанционным управлением при получении сигнала(ов) первого типа (запроса на перемещения). В этом случае контроллер 103 может определить, остановлен ли в данный момент подъемник-загрузчик по условию 204, например, при использовании обратной связи от АЦП или другого соответствующего устройства, детектирующего перемещение подъемника-загрузчика. Если подъемник-загрузчик не остановлен, процесс может либо дополнительно выполнить ожидание до остановки подъемника-загрузчика, или процесс может быть проигнорирован или иным образом прекратить выполнение проверки необходимости выполнения запроса на перемещение, что проиллюстрировано пунктирными линиями.
Кроме того, процесс может потребовать не только остановки подъемника-загрузчика, но и чтобы не было перемещение подъемника-загрузчика в течение заранее определенного времени. Таким образом, например, если подъемник-загрузчик остановлен, процесс может определить, прошло ли определенное время после детектирования остановки подъемника-загрузчика по условию 206. Если заранее определенное время не прошло, процесс может продолжить ожидание до окончания этого времени, либо игнорировать или иным образом прекратить выполнение обработки полученного запроса на перемещение, что проиллюстрировано пунктирными линиями.
Процесс также может выполнить проверку на условие 208 для состояний подъемника-загрузчика, например, рабочих характеристик, и/или окружающих условий, которые оказывают влияние на функционирование подъемника-загрузчика в ответ на дистанционный запрос на перемещение. Если проверка(и) состояния подъемника-загрузчика показывают, что можно продолжать обработку запроса на перемещение, обработка продолжается. В противном случае процесс может либо выполнить ожидание до момента решения по условию, либо игнорировать или иным образом прекратить выполнение обработки полученного запроса на перемещение, как показано пунктирными линиями.
Рабочие и внешние условия, которые могут стать причиной процесса, который проигнорирует или иным образом отклонит выполнения полученного запроса на перемещение от устройства 70 дистанционного управления, могут включать в себя такие факторы, как детектирование наличия оператора на площадке, детектирование наличия объекта на пути движения подъемника-загрузчика, детектирование того, что подъемник-загрузчик находится в области или месте, где беспроводное дистанционное управление не возможно, например, в конце проходов или на перекрестках, при помощи, например радиометок, описанных со ссылками на фиг.4, детектирование отсутствия поддона или иной несущей конструкции на вилах подъемника-загрузчика, обнаружение того, что на подъемнике-загрузчике зарегистрирован постронний оператор, и/или обнаружение того, что подъемник-загрузчик сопряжен с неавторизованным (посторонним) пользователем, детектирования того, что уровень мощности полученного запроса на перемещение находится вне допустимого диапазона, например уровень мощности слишком низкий, то есть оператор находится вне заданной зоны, либо слишком высокий, то есть оператор находится слишком близко к подъемнику-загрузчику, и т.п. Соответственно, для того, чтобы подъемник-загрузчик мог обработать дистанционный запрос на перемещение, оператору может понадобиться подождать, убрать препятствие, или иным образом исправить ситуацию.
Процесс может также выполнить проверку того, находится ли угол поворота подъемника-загрузчика в заданном диапазоне углов поворота по условию 210. Если рулевое (управляемое) колесо(а) подъемника-загрузчика повернуто на угол, выходящий из заданного диапазона, угол поворота может быть откорректирован по условию 212. Альтернативно система может вернуть приводное колесо в положение по умолчанию, например, направление по прямой, или система может игнорировать или иным образом прекратить обработку запроса на перемещение.
Затем по условию 214 подъемник-загрузчик движется прямо. Например, если каждое оцениваемое условия, удовлетворяется контроллером, как допустимое дистанционное управление, контроллер заставляет систему регулирования тягового усилия осуществлять перемещение подъемника-загрузчика. Подъемник-загрузчик также может подавать звуковой сигнал предупреждения или иные виды аудио или визуальных сигналы во время движения подъемника-загрузчика в ответ на команды беспроводного дистанционного управления, либо в случае, или когда остается задействованным орган управления устройства 70 дистанционного управления, например, при помощи источника 68 света и/или индикатора, например, проблескового маячка 72. Как изложено далее в примерах, попутно с включением тягового двигателя при работе подъемника-загрузчика в ответ на команды устройства беспроводного дистанционного управления может быть задействован гудок и/или иной сигнал посредством реле или аналогичных коммутирующих устройств.
Процесс проводит проверку на условие 216, чтобы определить, произошла ли остановка. Например, процесс может выполнить проверку, чтобы определить, деактивизировал ли оператор орган управления перемещением на устройстве 70 дистанционного управления. После деактивизации органа управления перемещением подъемник-загрузчик останавливается, например, путем включения тормоза, накатом, или путем выполнения иных действий для остановки. Процесс также может провести проверку по условию 216, чтобы определить прошло или заданное время, расстояние перемещения или другое подобное событие в ответ на перемещение транспортного средства в ответ на команду беспроводного дистанционного управления.
Например, подъемник-загрузчик может быть настроен после получения однократного запроса на перемещение от устройства беспроводного дистанционного управления выполнять непрерывное перемещение на максимальное расстояние. В качестве другого примера подъемник-загрузчик может быть настроен выполнять непрерывное перемещение на максимальное расстояние после получения повторного запроса на перемещение от устройства беспроводного дистанционного управления. Примерный диапазон может составлять расстояние, ограниченное 25-50 футами (примерно от 7,6 до 15,2 метров). В качестве другого примера подъемник-загрузчик может быть настроен выполнять непрерывное перемещение в течении до заданного максимального времени.
Другие примеры событий, связанных с остановкой, могут включать в себя условия (работы) подъемника-загрузчика, определяемые, например, заранее определенными пределами перемещения, получением команды остановки или отключения, детектирования препятствия на пути движения подъемника-загрузчика 10, детектированием наличия человека на подъемнике-загрузчике, детектированием изменения в положении грузонесущего устройства (например, поддона, контейнера), детектирования отклонений от нормального состояния механических, электрических, пневматических систем подъемника-загрузчика, и т.п. Если заранее определенное события остановки подъемника-загрузчика соответствует условию 216, подъемник-загрузчик останавливается, либо выполняется его остановка накатом по условию 218, и система возвращается к исходному состоянию. Если оператор дает запроса на перемещение с устройства 70 беспроводного дистанционного управления до завершения выполнения поставленной задачи, система может выполнить ожидание завершения текущей задачи до подачи следующей команды.
В соответствии с различными аспектами настоящего изобретения устройство 70 беспроводного дистанционного управления является носимым устройством дистанционного управления, надеваемым оператором, взаимодействующим с подъемником-загрузчиком. В общем, носимое устройство беспроводного дистанционного управления может включать в себя радиопередатчик (беспроводной связи) и орган управления перемещением, напр., кнопку или переключатель, коммуникативно связанный с радиопередатчиком. Как подробно описано далее, при задействовании органа управления перемещением радиопередатчик передает сигнала первого типа, который может затребовать, чтобы подъемник-загрузчик перемещался в первом направлении. В зависимости от конкретного осуществления устройство беспроводного дистанционного управления может также включать блок питания, например, аккумуляторную батарею, служащий для питания электронных элементов устройства дистанционного управления, область управления, в которой расположен орган управления перемещением, располагаемый на операторе, напр., на кисти оператора или рядом с ней, и линия коммуникационной связи между передатчиком и областью управления, в случае, если передатчик физически отделен от области управления при ее ношении оператором.
Как показано на фиг.6 примерная гарнитура 250 включает в себя конструкцию, подобную перчатке, надеваемую оператором. Гарнитура 250, показанная на иллюстрации, включает в себя первую область 252 управления, зону 254 закрепления стыковки (подключения), которая служит опорой для съемного передатчика и блока питания, а также линий коммуникационной связи, выполненный в виде цепи 256 канала связи, обеспечивающего связь между первой областью 252 управления и зоной подключения. Как показано на иллюстрации, область управления 252 включает в себя первый орган управления 258, например, кнопку, расположенную сбоку пальцевой области гарнитуры 250. В описываемом примере кнопка выступает из пальца (напалка) перчатки, в который проходит указательный палец оператора при правильном одевании гарнитуры 250. Ориентирование кнопки обеспечивает расположение ее основной верхней поверхности напротив большого пальца оператора подъемника-загрузчика. Как подробно описано далее такое расположение дает возможность оператору подъемника-загрузчика достичь и задействовать первый орган управления 258 при помощи большого пальца, давая возможность таким образом функционировать устройству дистанционного управления при помощи действия одной руки. Кроме того, как будет подробно изложено далее, это действие может быть выполнено даже во время выполнения рабочих задач, таких, как удержание или перенос коробок, сканирующих устройств, инструментов, и т.п.
Зона 254 стыковки (закрепления) включает несколько контактов 260, обеспечивающих электрическое подключение к первой области 252 управления посредством цепи 256. В качестве примера цепи 256 может включать в себя гибкую печатную плату, встроенную в гарнитуру 250 или иным образом скрыта элементами ее конструкции. Кроме того, цепь 256 дополнительно обеспечивает установку одной или более антенн 262. Зона 254 стыковки допускает размещения на ней устанавливаемого с возможностью съема устройства 264 связи. Например, устройство 264 связи может иметь контактные площадки для соединения с контактами 260 в области стыковки при правильной пристыковке устройства 264 связи к гарнитуре 250. Устройство 264 связи может быть прихвачено, зафиксировано, закреплено при помощи застежки типа «крючки-петли», например, ленты-липучки или материала продаваемого под торговой маркой Velcro® by Velcro Industries, Manchester New Hampshire, USA, закрепляемого магнитными силами или другими подходящими способами.
На фиг.7A и фиг.7B, в общем, устройство 264 связи показано со снятой крышкой для иллюстрации примерного расположения компонентов на первой поверхности (фиг.7A) и компонентов на соответствующей второй поверхности (фиг.7B) печатной платы устройства 264 связи. Устройство 264 связи включает в себя несущий элемент 270, например, двухстороннюю печатную плату, включающую в себя на первой стороне плату (цепь) 272 регулятора, обеспечивающую регулирование питания, используемого для работы устройства 264 связи, визуальные индикаторы 274, например, светоизлучающие диоды (LED) (далее светодиод), обеспечивающие визуальную обратную связь работы устройства 264 связи, компонентов 276 ввода, таких, как переключатели, процессор 278, а также кварцевый тактовый генератор 280, или цепь генерирования тактовых импульсов процессора (если таковой требуется для конкретного процессора). На второй стороне несущий элемент дополнительно расположена батарейку 282, цепь 284 связи, такие, как передатчик, приемник, приемопередатчик, и т.п., а также контактных столбиков 286 которая соединяется с контактными столбиками зоны 254 стыковки при состыковке устройства 264 связи с гарнитурой 250.
Визуальные индикаторы 274 могут использоваться для отображения оператору визуальной обратной связи состояния системы дистанционного управления. Например, первый индикатор может служить для отображения отказов. Например, светодиод может высветить символ «X» в центре круга (см. фиг.6), инфицирующий состязание отказе, например, когда кнопка 258 «Go" не соединена, при отказе или коротком замыкании какой-либо кнопки, отсутствии радиосвязи, отсутствии совпадения идентификационного кода приемника, сопряженного с передатчиком (подробно описано далее), и т.п. Другой индикатор 274 может использоваться для индикации низкого уровня заряда батареи, что отображается значком батареи, как показано на фиг.6. Индикаторы могут использоваться для другого, и кроме того, может быть предусмотрено более или менее двух индикаторов. Устройство 70 дистанционного управления может дополнительно включать в себя дополнительные сигнальные элементы, такие, как экраны индикации, средства подачи звуковых сигналов, и иное оборудование, обеспечивающее визуальные и/или звуковые сигналы, информирующие о состоянии устройства дистанционного управления и/или связанного с ним подъемника-загрузчика 10.
Компоненты 276 ввода могут включать в себя, например, две кнопки. Первая из кнопок может соответствовать кнопке подачи звукового сигнала. При нажатии на кнопку подачи звукового сигнала на приемник 102 на подъемнике-загрузчике 10 передается соответствующее сообщение на подачу звукового сигнала гудком подъемника-загрузчика. Вторая кнопка может быть кнопкой экстренного выключения. При нажатии на эту кнопку происходит передача команды экстренного выключения на приемник 102 на подъемника-загрузчика 10. При получении команды экстренного выключения подъемник-загрузчик 10 может быть выключен и обесточен, при этом для запуска подъемник-загрузчик оператору необходимо повторно выполнить процедуру запуска, как подробно описано далее.
Передатчик в цепи 284 связи может передавать информацию в аналоговом или цифровом виде, используя любую пригодную запатентованные или стандартизованные форматы беспроводной передачи данных. Например, передача может осуществляться при помощи существующих технологий, таких, как стандарты 802.11 и 802.16, Bluetooth, службы текстовых сообщений (SMS), кодирование со сдвигом амплитуды (амплитудно-кодовой модуляции) (ASK), амплитудной манипуляции (ООК), беспроводной локальной сети (WLAN), множественный доступ с кодовым разделением каналов (CDMA), амплитудной модуляции (AM), частотной модуляции (FM), универсальной системы мобильной связи (UMTS), технологии сотовой телефонии, такой, как глобальная система мобильной связи (GSM), и т.п. На практике метод передачи информации передатчиком должен соответствовать формату, который распознается приемником подъемника-загрузчика 10. Кроме того, цепь связи 284 устройства 70 дистанционного управления может также иметь собственный приемник для двухсторонней связи с соответствующим подъемником-загрузчиком 10.
При правильной установке устройства 264 связи в соответствующей гарнитуре 250, устройство 70 дистанционного управления обеспечивает удобную систему, позволяющую оператору подъемника-загрузчика дистанционно управлять транспортным средством. Например, пользователь может задействовать кнопку 258 «Ход», которая устанавливает связь с процессором 278 устройства 264 связи посредством цепи 256 и соответствующие контактов 260 и контактных столбиков 286. При нажатии на кнопку 278 «Ход» процессор форматирует и передает запрос на перемещение, посредством которого выполняется перемещение подъемника-загрузчика, если запрос был получен подъемником-загрузчиком и определен как действительный.
Если запрос на перемещение был должным образом получен приемником 102 и определен как действительный запрос на перемещение осуществляется беспроводное дистанционное управление подъемником-загрузчиком 10, который перемещается на установленное расстояние и/или в течение установленного времени, а затем вводится управляемый тормоз или накат, как подробно описывается в данном документе. Альтернативно кнопка 258 может обеспечить перемещение подъемника-загрузчика 10 в течение времени задействования кнопки 258 (либо до момента другого события, например, перемещения подъемника-загрузчика 10 на максимальное расстояние, истечения периода перемещения, детектирования внешних или рабочих условий, ведущих к остановке подъемника-загрузчика, и т.п.). Область 252 управления и/или устройство 264 связи также, если потребуется, могут включать в себя органы управления направлением движения и/или органы управления перемещением по курсу, передающие команды подъемнику-загрузчику, позволяющие корректировать угол поворота подъемника-загрузчика, как более подробно описывается в данном документе.
Кроме того, если потребуется, может присутствовать кнопка остановки, например, в области 252 управления и/или на устройстве 264 связи, позволяющая остановить подъемник-загрузчик, что может быть полезно при использовании функции остановки накатом. Если команда остановки правильно получена приемником 102, будет выполнена остановка подъемника-загрузчика 10. Альтернативно команда остановки может подаваться дополнительной кнопкой, если потребуется, которая, при правильном получении команды приемником 102 подъемника-загрузчика 10, будет заставит подъемник-загрузчик 10 двигаться накатом до остановки.
При нажатии любой кнопки на устройстве 70 дистанционного управления процессор 278 форматирует соответствующее сообщение команду и передает соответствующий сигнал через передатчик 284 на приемник 102. При этом процессор 278 может добавить к команде, последовательности данных, управляющему сигналу, или иной информации для идентификации, временную отметку, индикацию канала, или иные данные, необходимые, для опознавания конкретным приемником 102 конкретного устройства 70 дистанционного управления как действительного устройства связи, для опознавания операторов, для регистрации данных в журнале работы, или для иных целей, и т.п.
Хотя устройство 70 дистанционного управления описано как гарнитура в виде перчатки, надеваемой оператором на запястье или на руку, оно может быть выполнено и в другой форме. Например, передатчик, источник питания, и/или любые из органов управления, например, кнопка 258, могут размещаться отдельно или совместно на любой части тела с учетом удобства, практичности, или необходимости, в зависимости от конкретного применения. Например, как показано, гарнитуру 250 носит соответствующий оператор. Соответственно, каждый оператор может иметь собственную перчатку со встроенными кнопкой 258, цепью 256, и антенной(ами) 262. В начале смены оператор извлекает устройство 264 связи из соответствующей зарядной станции или иного места расположения (хранения), и устанавливает его в соответствующую зону 254 стыковки.
При отделении устройство 264 связи от гарнитуры 250 и соответствующей кнопки 258, один передатчик может быть использован с несколькими видами гарнитур 250. При этом операторы разных смен могут использовать собственные гарнитуры 250, включая устройства управления, надеваемые на пальцы или на руку, например, кнопку 258, просто стыкуя с или подключая к устройство связи к гарнитуре 250 в начале смены. Это дополнительно позволяет использовать в гарнитуре 250 возможности технологии идентификации, такие, как радиометки (RFID), и информация которых может быть соответственно передана на подъемник-загрузчик 10. При этом подъемник-загрузчик 10 может обеспечивать ведение журнала информации об операторе, производительности, и иной соответствующей информации во время работы.
Как показано на фиг.8A и фиг.8B, кнопка 258 устройства дистанционного управления легкодоступна и может быть задействована соответствующим большим пальцем оператора, как схематически показано стрелками направления. Такое действие требует обдуманного, но легко осуществимого действия оператора по задействованию кнопки 258. Кроме того, для задействования кнопки 258 могут потребоваться серии действий. Например, для задействования органа управления может понадобиться двойное быстрое последовательное нажатие, т.е. «двойное нажатие», как описано в данном документе. Устройство 70 дистанционного управления может надеваться таким образом, чтобы не создавать неудобств для руки оператора, и чтобы не создавать других помех при выполнении оператором действий двумя руками для захвата товаров. Более того, отсутствуют такие неудобства, как необходимость размашистых движений конечностями, неудобное расположение органов управления перемещением, или необходимость остановки подъемника-загрузчика 10, даже в случае, когда руки оператора в конкретный момент времени заняты захватом (выемкой) груза. Например, оператор может переместить или остановить подъемник-загрузчик 10 при помощи отдельных простых телодвижений, даже когда он переносит выбранные грузы, например, коробки, и т.п., в обеих руках.
Согласно одному аспекту настоящего изобретения, область 288 вокруг кнопки 258 может включать в себя выступающий или контурный поясок. Для задействования и/или выбора кнопки 258 оператору необходимо нажать вниз в направлении, показанном стрелкой внутри пояска, и задействовать кнопку 258. В еще одном варианте осуществления, если потребуется, для успешной передачи сигнала задействования необходимо выполнить многонапраленное задействование кнопки 258. Например, может понадобиться нажать кнопку 258, затем сдвинуть в сторону, под прямым углом к направлению нажатия кнопки.
Гарнитура 250 может быть выполнена из произвольных видов материалов, например, из растягивающейся ткани, пластика, синтетических, или иных материалов, как одного, так и их сочетания. Кроме того, различные компоненты устройства 70 дистанционного управления могут крепиться как нарукавная повязка, как зажимное средство для ремня или рубашки, или иным способом. Кроме того линия связи, соединяющая область управления с передатчиком на гарнитуре, может быть выполнен в виде относительно тонкого провода, который, если требуется, может быть намотан на катушку для сматывания.
Кнопка 258 может быть расположена под подпружиненным откидным элементом, который может быть откинут вручную для того, чтобы открыть кнопку 258. Кроме того, кнопка 258 может быть, если требуется, запрограммирована поддерживать выполнение множества команд. Например, устройство 70 дистанционного управления может быть настроено передавать команду «остановка» при детектировании однократного нажатия кнопки 258. Команда «перемещение» может быть передана при детектировании двойного нажатия или двойного задействовании кнопки 258 в течение заданного временного интервала. Альтернативно, устройство 70 дистанционного управления вместо передачи различных типов сигналов, соответствующих каждой запрошенной команды, например, остановки, перемещения и т.п., может передавать одиночные или множество последовательных экземпляров одного и того же сигнала на основе количества нажатий, выполненных оператором, при этом контроллер 103 на подъемнике-загрузчике 10 после получения экземпляра сигнала(ов) принимает решение о том, какую команду, при необходимости, выполнять, на основе количества полученных экземпляров сигналов и/или текущих состояний подъемника-загрузчика, например, остановлен или перемещается в данный момент времени подъемник-загрузчик с беспроводным дистанционным управлением.
Например, одиночное нажатие оператором на кнопку на устройстве 70 дистанционного управления, может вызвать передачу подъемнику-загрузчику 10 одного экземпляра сигнал, тогда как двойное нажатие оператором на кнопку устройство дистанционного управления (70) может передать подъемнику-загрузчику 10 двойной экземпляр сигнала. Одиночный экземпляр сигнала может заставить подъемник-загрузчик 10 выполнить функцию остановки, тогда как двойной экземпляр сигнала может заставить подъемник-загрузчик 10 выполнить функцию перемещения, как описано в настоящем документе, хотя экземпляры сигнала могут заставить подъемник-загрузчик 10 для выполнять другие заранее определенных функций, как описано в настоящем документе.
В качестве другого примера, контроллер 103 подъемника-загрузчика 10 после получения одного или более экземпляров сигнала может выполнить оценить состояние транспортного средства и выполнить конкретную функцию подъемника-загрузчика на основе числа полученных экземпляров сигнала и состояния транспортного средства. В этом примере однократное нажатие оператором на кнопку может вызвать передачу устройством 70 дистанционного управления одного экземпляра сигнала на подъемник-загрузчик 10, а двойное нажатие на кнопку оператором на кнопку может вызвать передачу устройством 70 дистанционного управления двух экземпляров сигнала подъемник-загрузчик 10. Одиночный экземпляр сигнала может заставить подъемник-загрузчика 10 выполнить функцию остановки, если подъемник-загрузчик перемещается при беспроводном дистанционным управлением после получения сигнала подъемником-загрузчиком 10. Двойной экземпляр сигнала может также заставить подъемник-загрузчик выполнить функцию остановки, если он перемещается при беспроводном дистанционном управлении после получения сигнала подъемником-загрузчиком 10. Если подъемник-загрузчик (10) остановился после получения сигнала(ов), двойной экземпляр сигнала может заставить подъемник-загрузчик выполнить функцию перемещения, тогда как одиночный экземпляр сигнала может не заставить подъемник-загрузчик 10 выполнить функцию остановки, т.е., подъемник-загрузчик игнорирует сигнал.
Альтернативно, на устройство 264 связи может быть могут быть предусмотрены резервные органы управления перемещением, которые могут нажиматься независимо, либо быть запрограммированы на одновременное задействование для перемещения подъемника-загрузчика 10. Устройство 264 связи может надеваться на руку оператора, например, непосредственно над ладонью, либо располагаться в любом легкодоступном месте, например, на ремне, рубашке или брюках (штанах), в каждом из этих случаев, устройство 264 связи может быть связано соответствующим проводом с кнопкой 258. Кроме того, для обеспечения связи устройства связи (264) может быть использована беспроводная технология ближней связи, такая, как Bluetooth, и надеваться оператором отдельно от гарнитуры 250 и соответствующей кнопки 258.
Устройство 70 дистанционного управления может также одеваться как брелок на шее оператора, например, при навешивании устройства 70 дистанционного управления на подходящий шнур. В таком исполнении кнопка 258 может быть парой переключателей, выполненных в виде текстурированных резиновых поверхностей, на противоположных сторонах устройства 70 дистанционного управления. При этом для осуществления управлением движением оператору необходимо сжимать устройство 70 дистанционного управления. При наличии двух переключателей может требоваться одновременное задействование обоих переключателей. Это также лает возможность интегрировать передатчик, блок питания, и органы управления в одном корпусе, минимизируя таким образом помехи, создаваемые устройством 70 дистанционного управления для оператора, например, путем устранения проводов и иных конструкций, которые могут открепляться или быть неудобны для оператора. Для осуществления управления остановкой или движения накатом, оператору может понадобиться, например, взяться за брелок и потянуть устройство 70 дистанционного управления книзу. Сила давления вниз заставляет передатчик передавать команду остановки или движения накатом, в зависимости от конкретной программы. Носимое устройство 70 дистанционного управления надеваться путем надевания шнура на шею оператора.
Согласно другому аспекту настоящего изобретения, устройство 70 дистанционного управления может закрепляться на рубашке, ремне, брюках (штанах), жилете, униформе, или ином товаре одежды, используя соответствующий зажим. Этот пример технического исполнение предполагает еще одну цельную (моноблочную) конструкцию, где передатчик и область управления объединены в общем корпусе. Кроме того, зажим позволяет прикрепить устройство 70 дистанционного управления в любом удобном месте на операторе или около него. Зажим также может быть прикреплен к шнуру для обеспечения ношения на шее оператора. Обычно округлая конфигурация и обтекаемая форма устройства 70 дистанционного управления может обеспечить относительно низкопрофильную конструкции, что улучшить удобство ношения, так как устройство дистанционного управления может одеваться таким образом, что устройство 70 дистанционного управления располагается близко к телу оператора.
Согласно еще одному типовому аспекту настоящего изобретения устройство 70 дистанционного управления может быть выполнено в виде передатчика, управляемого голосом. Устройство 70 дистанционного управления может крепиться, например, на ремешок на торсе, через плечо, или иным подходящим образом. Устройство 70 дистанционного управления также включает в себя микрофон. Микрофон может поворачиваться или его положение может регулироваться иным образом, чтобы обеспечить легко приспосабливаемое размещение микрофона перед оператором. Одновременно с голосовым управлением может также быть предусмотрена дублирующая кнопка для остановки или движения накатом. Эта конструкция обеспечивает гибкость при размещении устройства 70 дистанционного управления на операторе. Кроме того, устройством дистанционного управления можно управлять без помощи рук. Голосовые команды предпочтительно должны быть простыми.
При использовании системы голосового управления устройства 70 дистанционного управления могут использоваться голосовые команды оператора, такие, как «ПЕРЕМЕЩЕНИЕ», «ВПЕРЕД», «НАКАТ», «СТОП», и т.п., для выполнения перемещения подъемника-загрузчика 10 на установленное расстояние с сохранением направления, заданного контроллером 112 рулевого управления направлением движения (как показано на фиг.2), т.е., параллельно местам складирования 122 в проходе 120. Команды «ПЕРЕМЕЩЕНИЕ», «ВПЕРЕД», «НАКАТ», «СТОП», и т.п., могут быть использованы для связи с контроллером 106 тягового двигателя, тогда как контроллер 112 сам выполняет автоматическую корректировку для обеспечения прямолинейного направления или друго желаемого направления движения. Устройство 70 дистанционного управления может дополнительно предоставлять оператору возможность незначительные корректировать направление подъемника-загрузчика 10, например, посредством таких голосовых команд, как «ВЛЕВО» или «ВПРАВО», чтобы корректировать направление движения подъемника-загрузчика. При этом преобразование голосовых команд в команды управления подъемником-загрузчиком 10 может выполняться процессором, или устройством 70 дистанционного управления, или контроллером 103 подъемника-загрузчика 10.
Еще одной альтернативной реализацией устройства дистанционного управления является вариант кнопки 258, задействуемой большим пальцем. Вместо одной предусмотрено две кнопки. Первая и вторая кнопки имеют первый переключающий компонент и дополнительный совместно используемый общий второй переключающий компонент. В частности, гарнитура включает в себя первую полосу или палец, например, для указательного пальца оператора подъемника-загрузчика, которая поддерживает первый переключающий компонент первой кнопки и первый переключающий компонент второй кнопки, в виде, например, углубления. Когда гарнитура надета, первые переключающие компоненты ориентированы вдоль боковой стороны указательного пальца оператора. Контакт первой кнопки предусмотрен обычно вдоль основания углубления первого переключающего компонента. Аналогично, контакт второй кнопки предусмотрен обычно вдоль основания углубления второго переключающего компонента.
Соответственно, гарнитура включает в себя полосу, служащую для удержания общего второго переключающего компонента на большом пальце оператора. Второй переключающий компонент включает в себя общий контакт, расположенный в верхней части (конце) выступа, соответствующего обычно углублению элементов левых переключающих компонентов первой и второй кнопок. Для задействования первой кнопки осуществляется электрическое соединение общего контакта на большом пальце оператора с контактом первой кнопки, например, направлением выступа второго переключающего компонента во впадину первого переключающего компонента. При установлении электрического контакта между контактом первой кнопки и участком общего контакта, достигается задействование соответствующего органа управления. Аналогично, для задействования второй кнопки устанавливается общий контакт на большом пальце оператора с контактом второй кнопки, например, приводя выступ второго переключающего компонента в плотное соединение с контактом второй кнопки. При установлении электрического контакта между контактом второй кнопки и участком общего контакта, задействуется соответствующий орган управления.
Любые описанные конструкции устройства 70 дистанционного управления могут быть оборудованы органами коррекции направления движения. Например, устройство 70 дистанционного управления может включать в себя дополнительные органы управления в области управления например, кнопку поворота налево и кнопку поворота направо в дополнение к кнопке перемещения и дополнительно устанавливаемой кнопки остановки или движения накатом. Диапазон дистанционной коррекции направления движения может зависеть от совокупности факторов, таких, как рабочая среда, типичная величина стандартной корректировки, и т.п. Однако, в примере конструкции может быть реализовано малое значение корректировки угла поворота при каждом задействовании органов управления для поворота налево и направо, например, порядка 1 градуса или менее.
Дополнительно система дистанционного управления может быть также интегрирована с устройством органом управлением углом поворота подъемника-загрузчика 10. Устройство управления углом поворота обычно реализуется при помощи потенциометра, АЦП, или иного подходящего устройства ввода, и может размещаться в удобном месте на подъемнике-загрузчике 10. При использовании совместно с дополнительными органами управления направлением движения, устройство управления углом поворота используется для задания желаемого направления движения подъемника-загрузчика 10. Например, при работе на складе оператор может выровнять подъемник-загрузчик 10 в проходе параллельно ряду стеллажей. При помощи обратной связи от контроллера 112 рулевого управления направлением движения (показано на фиг.2) в процессе движения подъемника-загрузчика 10 можно выдерживать направление движения подъемника-загрузчика 10 параллельно стеллажам. Устройство управления углом поворота предотвращает уход подъемника-загрузчика 10 с курса. При такой конструкции запрос на перемещение от устройства 70 дистанционного управления вызывает перемещение подъемника-загрузчика 10 прямо вдоль направления, установленного контроллером управления направлением движения.
Система, осуществляющая функцию контроля толчкового перемещения, описанная в настоящем документе, может осуществлять дополнительные усовершенствованные функции для выполнения специальных рабочих требований. Например, передатчики могут иметь команду «общая остановка», которая останавливает все подъемники-загрузчики 10 в пределах дальности действия передатчиков, работающих с дистанционным управлением. Таким образом, все приемники могут быть запрограммированы или иным образом настроены на распознавание команды остановки, например, при помощи глобальной или общей последовательности команд. Кроме того, общая команда остановки может передаваться вместе с идентификационным кодом оператора для идентификации личности оператора, подавшего команду общей остановки.
Во всех описанных примерных системах антенна передатчика может располагаться в корпусе передатчика, совмещена с гарнитурой, например, путем прикрепления антенны к контактной ленте, ремням, лентам, или иным элементам, связанным с передатчиком, надеваемым оператором, путем размещения вместе с проводкой между передатчиком и органами управления, и т.п.
Кроме того, передатчик может быть направленным. Например, на подъемнике-загрузчике 10 может быть оборудована целевая метка (маркер), например, как часть приемника 102 или антенны 66. При этом для обеспечения управления подъемником-загрузчиком 10, например, передачи команды перемещения, оператору необходимо направить передатчик или устройство 70 дистанционного управления на целевую метку или в ее направлении. Альтернативно, некоторые команды могут быть не направленными, а другие - направленными. Например, выполнение общей остановки (при наличии такой функции) может не требовать направленной передачи на целевую метку. С другой стороны, для выполнения команды перемещения может потребоваться направленная передача на целевую метку Направленная передача может выполняться, например, при помощи инфракрасной или иными схожими технологиями.
Многочисленные примеры конструкций дистанционного управления, описанные в настоящем документе, приведены в качестве примера, но не для ограничения возможного способа исполнения устройства дистанционного управления. Различные описанные функции могут совмещаться любым желаемым образом. Кроме того, могут быть предусмотрены дополнительные функции в дополнение или в качестве замены функций, изложенных в настоящем документе. Помимо этого, подъемник-загрузчик, система дистанционного управления и/или ее компоненты, включая устройство 70 дистанционного управления, могут включать в себя любые дополнительные и/или альтернативные функции или варианты реализации, примеры которых раскрыты в предварительном описании в заявке на патент США №60/825,688, поданной 14 сентября 2006 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», заявке на патент США №11/855,310, поданной 14 сентября 2007 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», заявке на патент США №11/855,324, поданной 14 сентября 2007 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», в предварительном описании заявки на патент США №61/222,632, поданной 2 июля 2009 г., с названием «APPARATUS FOR REMOTELY CONTROLLING A MATERIAL HANDLING VAHICLES», в заявки на патент США №12/631,007, поданной 4 декабря 2009 г., с названием «MULTIPLE ZONE SENSING FOR MATERIALS HANDLING VEHICLES», в предварительном описании заявки на патент США №61/119,952, поданной 4 декабря 2008 г., с названием «MULTIPLE ZONE SENSING FOR REMOTELY CONTROLLED MATERIALS HANDLING VEHICLES», в предварительном описании заявки на патент США №61/234,866, поданной 18 августа 2009 г., с названием «STEER CORRECTION FOR A REMOTELY OPERATED MATERIALS HANDLING VEHIVLE», в заявке на патент США №12/649,738, поданной 30 декабря 2009 г., с названием «APPARATUS FOR REMOTELY CONTROLLING A MATERIALS HANDLING VAHICLE», в заявке на патент США №12/649,815, поданной 30 декабря 2009 г., с названием «STEER CORRECTION FOR A REMOTELY OPERATED MATERIALS HANDLING VEHIVLE», заявке на международный патент № PCT/US09/66789, поданной 4 декабря 2009 г., озаглавленной «МНОГОЗОНАЛЬНОЕ ДЕТЕКТИРОВАНИЕ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ», в международной заявке на патент № PCT/US09/69839, поданной 30 декабря 2009 г., озаглавленной «APPARATUS FOR REMOTELY CONTROLLING A MATERIALS HANDLING VAHICLE», в международной заявке на патент № PCT/US09/69833, поданной 30 декабря 2009 г., с названием «STEER CORRECTION FOR A REMOTELY OPERATED MATERIALS HANDLING VEHIVLE», в международной заявке на патент № PCT/US07/78455, поданной 14 сентября 2007 г., с названием «SYSTEMS AND METHODS OF REMOTELY CONTROLLING A MATERIALS HANDLING VEHICLE», и/или в патенте США №7,017,689, выданным 28 марта 2006 г., с названием «ELECTRICAL STEERINF ASSIST FOR MATERIAL HANDLING VEHICLE», содержание которых было включено в настоящий документ путем ссылки.
На фиг.9 показана процедура 300 синхронизации системы дистанционного управления с подъемником-загрузчиком. Оператор подъемника-загрузчика достает устройство связи из места хранения на этапе 302. Место хранения может включать в себя общую зону хранения неиспользуемых в данный момент устройств, зарядной станции, и т.п. Оператор подъемника-загрузчика затем подключает, устанавливает, или иным образом соединяет извлеченное устройство связи с соответствующей гарнитурой устройства дистанционного управления на этапе 304, например, прикрепляя устройство связи к стыковочной области перчатки, как подробно описывается в настоящем документе. Если оператор не сделал этого ранее, он надевает гарнитуру
Затем оператор подъемника-загрузчика запускает последовательность включения для подготовки подъемника-загрузчика к эксплуатации, т.е., оператор запускает подъемник-загрузчик на этапе 306. При запуске подъемника-загрузчика оператору может понадобиться ввести идентификационный код. Эта идентификация может быть обеспечена, например, путем передачи личного идентификационного номера (PIN-кода) на панели управления подъемника-загрузчика при помощи устройства-брелока, обеспечивающего идентификацию пользователя при регистрации в системе подъемника-загрузчика, или PIN-код оператора может быть закодирован в устройстве хранения информации, таком, как чип радиочастотной идентификации, встроенный в гарнитуру системы дистанционного управления, носимую оператором. При такой схеме устройство связи, прикрепленное к гарнитуре, может опознать PIN-код посредством контактов и контактных столбиков и передать PIN-код оператора на подъемник-загрузчик или на устройство, на подъемнике-загрузчике, например, идентификационный код оператора может быть получен считывателем радиометок, при приближении гарнитуры к подъемнику-загрузчику.
Затем оператор переходит в режим сопряжения с подъемником-загрузчиком на этапе 308. Возможно присутствие вблизи нескольких подъемников-загрузчиков и/или передатчиков, использующих беспроводное дистанционное управление в соответствии с различными аспектами настоящего изобретения. При этом на дисплее, установленном на подъемнике-загрузчике, могут быть перечислены или иным образом отображены идентификационные коды всех обнаруженных передатчиков. Оператор просматривает перечисленные идентификационные коды передатчиков и выбирает тот, который соответствует устройству связи, пристыкованному к гарнитуре системы дистанционного управления оператора по условию 310. Например, устройство связи может включать в себя наклейку, бирку, или иное обозначение, отображающее идентификационный код передатчика, например, идентификационный код передатчика указан на лицевой стороне устройства связи.
Затем система синхронизирует передатчик устройства дистанционного управления, надеваемого оператором, с приемником на соответствующем подъемнике-загрузчике на этапе 312. Например, контроллер 103 на подъемнике-загрузчике может запросить ввод оператором известной последовательности нажатий клавиш на устройстве 70 дистанционного управления, например, одновременного нажатия на кнопки звукового сигнала и аварийного выключения. Эта операция позволяет системе выполнить необходимую проверку, например, определение работоспособности кнопок, связанных с устройством дистанционного управления. Сразу же после синхронизации система может предоставить соответствующую визуальную индикацию, например, посредством отображения сообщения на подъемнике-загрузчике, которое показывает, что синхронизация завершена.
В зависимости от информации, необходимой для конкретного применения различных аспектов настоящего изобретения, могут быть взаимосвязаны (ассоциированы) три разных типа идентификации, включающие в себя идентификацию оператора, однозначную идентификацию устройства связи, и однозначную идентификацию подъемника-загрузчика. Эта информация может быть полезна, например, для проверки достоверности команд, полученных приемником подъемника-загрузчика, для регистрации данных для последующего анализа, для регистрации показателей производительности подъемника-загрузчика, и т.п.
На Фиг.10 изображена процедура 320 действий оператора в начале смены с использованием дистанционного управления, согласно различным аспектам настоящего изобретения. Оператор подъемника-загрузчика забирает устройство связи в соответствующем месте хранения на этапе 322. Как и в предыдущем примере, устройства связи могут храниться в зарядной станции и т.п. Оператор подъемника-загрузчика устанавливает устройство связи в гарнитуру на этапе 324. Затем устройство связи включается на передачу тонального сигнала подтверждения режима сопряжения на этапе 326. Например, тональный сигнал подтверждения может включать в себя повторяющуюся передачу сообщения, включающего в себя идентификацию передатчика. При этом передаваемый идентификационный код передатчика может совпадать с идентификационным кодом передатчика, написанным на устройстве связи, или иным образом известным оператору подъемника-загрузчика.
Оператор подъемника-загрузчика запускает подъемник-загрузчик на этапе 328, который может включать в себя регистрацию в системе подъемника-загрузчика, как подробно изложено выше. Оператор подъемника-загрузчика может затем ввести режим сопряжения на этапе 330 для синхронизации приемника подъемника-загрузчика с конкретным передатчиком, взятым оператором подъемника-загрузчика. В течение операции сопряжения приемник подъемника-загрузчика собирает все тональные сигналы подтверждения в своей области на этапе 332, и выводит список тональных сигналов, например, в виде идентификационного кода передатчика, на соответствующем дисплее. На одном показанном примере выводимые на дисплей идентификационные коды могут располагаться по мощности сигнала или иным соответствующим параметрам. Оператор подъемника-загрузчика выбирает идентификационный код, соответствующий коду передатчика, связанного с устройством связи, взятом и установленным в гарнитуру системы дистанционного управления на этапе 334. Идентификационный код передатчика, выбранный оператором, хранится в системе подъемника-загрузчика, т.е., в памяти контроллера на подъемнике-загрузчике.
На этапе 336 контроллер на подъемнике-загрузчике может передавать устройству связи, подключенному к гарнитуре системы дистанционного управления оператора, сообщение, включающее в себя уникальный идентификационный код приемника и/или иную информацию, которая может храниться в памяти устройства связи, надеваемой оператором. Затем на этапе 338 передатчик и приемник синхронизируются, например, как описано выше. Например, оператору может быть рекомендовано нажать на органы управления на устройстве дистанционного управления в определенной последовательности. В ответ на детектирование задействования запрошенного соответствующего органа(ов) управления и/или выполнения управляющей последовательности, устройство связи может передать сообщение приемнику на подъемнике-загрузчике, который идентифицирует идентификационный кода передатчика, идентификационный код приемника и код, соответствующий запрошенного органа(ов) управления и/или управляющей последовательности, которая была задействована для осуществления синхронизации приемника на подъемнике-загрузчике с устройством дистанционного управления, надеваемого оператором.
При этом, контроллер в подъемнике-загрузчике может ассоциировать идентификационный код передатчика с идентификационным кодом оператора, который был дан контроллеру подъемника-загрузчика оператором как часть регистрации по операции, запрошенной для запуска в работу подъемника-погрузчика. Контроллер может также ассоциировать идентификационный код относящийся к подъемнику-загрузчику/приемнику. Таким идентификационной код подъемника-загрузчика/приемника, идентификационный код дистанционного управления, и идентификационный кода оператора находятся в однозначной ассоциации. Контроллер в подъемнике-загрузчике может использовать эту тройственную ассоциацию для различения получаемых команд. Кроме того, устройство дистанционного управления также сохраняет информацию о подъемнике-загрузчике, с которым выполнена синхронизация, и/или другую, если требуется, информацию, например, идентификационный код оператора, и т.п., которая может использоваться при форматировании и передачи информации.
Как показано на фиг.11, после выполнения рабочих операций оператору подъемника-загрузчике может понадобиться временно покинуть подъемник-загрузчик, например, на время перерыва. На иллюстрации показана процедура 350 отключения, повторного запуска, и повторной синхронизации приемника подъемника-загрузчика и передатчика устройства связи, надеваемого оператором. Перед перерывом на обед и т.п. оператор подъемника-загрузчика отключает подъемник-загрузчик на этапе 352. Через определенное время оператор подъемника-загрузчика запускает подъемник-загрузчик на этапе 354. В течение этого перерыва передатчик, установленный в устройстве дистанционного управления, носимом оператором, может продолжать передавать синхронизированный тональный сигнал подтверждения, который идентифицирует идентификационный код передатчика и соответствующий идентификационный код подъемника-загрузчика/приемника. Синхронизированный тональный сигнал подтверждения, передаваемый передатчиком в устройстве связи, надеваемого оператором, детектируется на этапе 356, так как ассоциация идентификационного кода передатчика с идентификационным кодом приемника/подъемника-загрузчик) была сохранена в памяти подъемника-загрузчика.
Затем на этапе 358 контроллер подъемника-загрузчика может затребовать, чтобы оператор подтвердил систему, например, путем введения PIN-кода, или применяя некоторые другие меры по опознаванию, для подтверждения того, что данный оператор это тот же оператор, который эксплуатировал подъемник-загрузчик до перерыва. Сопряжение подтверждается и визуально отображается на этапе 360, если идентификационный код оператора, введенный как часть операции подтверждения, соответствует коду, который хранится в памяти подъемника-загрузчика, что означает, что это тот же оператор, который эксплуатировал подъемник-загрузчик до перерыва.
Например, контроллер подъемника-загрузчика может обеспечивать вышеописанную тройственную ассоциацию идентификационных кодов, т.е., идентификационного кода подъемника-загрузчика/приемника, идентификационного кода дистанционного управления, и идентификационного кода оператора, даже после выключения подъемника-загрузчика. При этом другой оператор не сможет воспользоваться беспроводным дистанционного управлением с подъемником-загрузчиком, даже если этот новый оператор будет иметь передатчик предыдущего оператора, так как у нового оператора нет идентификационного кода предыдущего оператора. Аналогично, если новый оператор запустит подъемник-загрузчик и введет идентификационный код нового оператора как часть процесса запуска подъемника-загрузчика, беспроводные дистанционные запросы на перемещения, выданные новым оператором, не будут подтверждены контроллером на подъемнике-загрузчике, так как не выполняется тройственная идентификация, то есть, новый передатчик нового оператора на синхронизирован с приемником на подъемнике-загрузчике.
Напротив, для того чтобы новый пользователь смог пользоваться функциями беспроводного дистанционного управления подъемника-загрузчика, этот новый оператор должен зарегистрироваться в системе подъемника-загрузчика, используя свой идентификационный код оператора, и выполнить новую процедуру синхронизации в режиме сопряжения для синхронизации передатчика нового оператора с приемником подъемника-загрузчика, например, используя способы, описанные в настоящем документе.
На фиг.12 показана более подробная процедура 370 для временного выключения подъемника-загрузчика, повторного запуска подъемника-загрузчика, и повторной синхронизации передатчика, надеваемого оператором подъемника-загрузчика, с приемником на подъемнике-загрузчике. Оператор подъемника-загрузчика выключает подъемник-загрузчик на этапе 372, например, на время перерыва, и т.п. Когда подъемник-загрузчик выключен, на этапе 374 происходит запуск таймера, связанного с контроллером на подъемник-загрузчике. В течение интервала времени, когда подъемник-загрузчик выключен, передатчик на устройстве связи, носимого оператором, продолжает передавать синхронизированный тональный сигнал подтверждения на этапе 376. Например, так как передатчик был ранее синхронизирован с приемником подъемника-загрузчика, тональный сигнал подтверждения может содержать сообщение, включающее в себя как идентификационный код передатчика, так и идентификационный код подъемника-загрузчика/приемника. Подъемник-загрузчик включается на этапе 378. Сразу после включения приемник на подъемнике-загрузчике начинает поиск соответствующего тонального сигнал подтверждения на этапе 380, который совпадает с идентификационным кодом передатчика, который был ранее сохранен в памяти.
Если синхронизированный тональный сигнал подтверждения детектируется в течение установленного предельного периода времени на этапе 282, тогда сопряжение поддерживается. Если синхронизированный тональный сигнал подтверждения детектируется после установленного предельного периода времени, оператору подъемника-загрузчика может потребоваться выполнить повторную синхронизацию, например, при помощи процедуры запуска, как изложено в примерах, описанных со ссылкой на фиг.9 и 10. Если сопряжение поддерживается, может быть детектирован идентификационный код передатчика на этапе 384, например, путем получения заранее определенного сообщения от передатчика устройства дистанционного управления, например, подтверждения повторной синхронизации. Оператору подъемника-загрузчика также может понадобиться подтвердить систему подъемника-загрузчика на этапе 386, например, введя идентификационный код оператора в подъемник-загрузчик, после чего подтверждение сопряжения завершается на этапе 388, например, посредством визуального отображения подтверждения для оператора подъемника-загрузчика.
В рамках этой системы, если другой оператор попытается использовать подъемник-загрузчик 10, этому новому пользователю необходимо будет очистить и повторно синхронизировать приемник на подъемнике-загрузчике с новым идентификационным кодом передатчика устройства дистанционного управления, надеваемого оператором. Однако если новый оператор попытается осуществить это, подъемник-загрузчик 10, если требуется, может отказаться от ответа на дистанционные команды нового оператора, например, в случае, если этот подъемник-загрузчик также привязан к идентификационному коду оператора. При этом, новому оператору может понадобиться начать выполнение всей процедуры запуска подъемника-загрузчика, а также последовательность сопряжения беспроводного дистанционного управления, в этом случае может понадобиться регистрация идентификационного кода оператора нового оператора подъемником-загрузчиком 10.
Если установленное время истекло, тогда информация по сопряжению, хранящаяся в памяти подъемника-загрузчика, может быть стерта, например, путем удаления ассоциации (связи) между идентификационным кодом приемника и идентификационным кодом передатчика. Аналогично, когда устройство связи снято из соответствующей зоны стыковки гарнитуры, и возвращено в место хранения, например, в зарядную станцию, может выполняться стирание участка памяти устройства связи, хранящего информацию по сопряжению. Например, когда устройство связи отсоединяется от гарнитуры и устанавливается в зарядное устройство или иное стыковочное устройство, идентификационный код приемника и/или иная информация, ранее хранившаяся в памяти устройства связи, на основе с информацией, полученной от контроллера подъемника-загрузчика, может быть стерта из устройства связи. Кроме того, эта информация может быть загружена в соответствующее коммерческое предприятие. Такая схема может быть полезна, например, когда устройства связи распределяются между группа пользователей.
Согласно дополнительным аспектам настоящего изобретения, индивидуальные средства связи могут быть приданы конкретным операторам подъемников-загрузчиков в качестве альтернативы иметь «банк» доступных передатчиков. Например, предположим, что оператор подъемника-загрузчика выключает его. В ответ на выключение начинает работать таймер. В это время информация о сопряжении еще хранится в памяти. После заданного интервала времени информация о сопряжении стирается из памяти системы подъемника-загрузчика. Предположим, что оператор подъемника-загрузчика оставляет устройство связи состыкованным с гарнитурой в течение продолжительного времени. После определенного времени бездействия это устройство связи может перейти в спящий режим, при этом запускается еще один таймер, например, для перехода в режим отключения. В течение этого времени информация о сопряжении хранится в памяти, а устройство связи продолжает передавать свой тональный сигнал подтверждения. В режиме отключения информация о сопряжении сохраняется. Однако устройство связи перестает передавать тональный сигнал подтверждения. После истечения третьего заданного периода времени, идентификационный код приемника стирается из памяти устройства связи.
На фиг.13 показан один из примеров варианта осуществления устройства 70 дистанционного управления, включающего в себя передатчик 1302, блок питания 1304, систему 1306 управления, и линию 1308 связи между передатчиком 1302 и системой 1306 управления. Передатчик 1302 может передавать информацию в аналоговом или цифровом виде, используя любой подходящий способ беспроводной передачи данных, включая стандартные или патентованные форматы. Например, передача может осуществляться при помощи существующих технологий, таких, как стандарты 802.11, 802.16, Bluetooth, службы текстовых сообщений (SMS), кодирование со сдвигом амплитуды (амплитудно-кодовой модуляции) (ASK), амплитудной манипуляции (OOK), беспроводной локальной сети (WLAN), множественный доступ с кодовым разделением каналов (CDMA), амплитудной модуляции (AM), частотной модуляции (FM), универсальной системы мобильной связи (UMTS), технологии сотовой телефонии, такой, как глобальная система связи мобильной связи (GSM), и т.п. На практике метод передачи информации передатчиком 1302 должен соответствовать формату, распознаваемому соответствующим приемником 102 (фиг.2) на подъемнике-загрузчике 10 (фиг.1). Кроме того, устройство 70 дистанционного управления может также иметь собственный приемник для двухсторонней связи с соответствующим подъемником-загрузчиком 10.
Система 1306 управления включает в себя органы управления, которые дают указание передатчику 1302 передавать соответствующую команду. На примере, представленном на фиг.13, показаны два органа управления, выполненных в виде переключателей или кнопок. Первая кнопка 1310 соответствует команде перемещения, которая при ее задействовании заставляет передатчик 1302 передать команду на перемещение. Если команда на перемещение правильно принята приемником 102, подъемник-загрузчик 10 выполнит перемещение вперед. Альтернативно, первая кнопка 1310 может включать кнопку «ход», подающую подъемнику-загрузчику 10 команду на движение в течение заданного времени и/или на определенное расстояние, а затем управляться или на выполнение торможения или движения накатом. Альтернативно первая кнопка 1310 может обеспечивать движение в течение времени постоянно задействованной кнопки 1310. Система 1306 управления может, если требуется, включать в себя органы управления направлением движения и/или управления перемещением по курсу, как подробно описано в данном документе.
Вторая кнопка 1312 соответствует команде остановки, которая при ее активации заставляет передатчик 1302 передать команду на остановку. Если команда остановки правильно принята приемником 102, подъемник-загрузчик 10 выполнит управляемую остановку. Альтернативно вторая кнопка 1312 может соответствовать команде движения накатом, при правильном получении которой приемником 102 на подъемнике-загрузчике 10, подъемник-загрузчик 10 будет двигаться накатом до остановки.
При нажатии кнопки 1310 или кнопки 1312 передатчик 1302 форматирует соответствующее сообщение и передает результирующий сигнал приемнику 102. При этом передатчик 1302 может добавить к команде, последовательности, управляющей или иной идентификационной информации, отметку времени, индикацию канала, или другие данные, необходимые для того, чтобы приемник 102 мог распознать (отличить), что конкретное устройство 70 дистанционного управления является действительным устройства связи, чтобы устанавливать подлинность операторов, зарегистрировать данные для архивирования или иных целей, и т.п.
Первая и вторая кнопки 1310, 1312 встроены в подходящую гарнитуру для пальцев 1314, которая на иллюстрации имеет первый ленточный сегмент (первая манжетка) 1316 для пальца, второй ленточный сегмент (вторая манжетка) 1318 для пальца, и перемычку 1320. Первый ленточный сегмент 1316 для пальца служит опорой первой кнопки 1310 для выполнения команды перемещения. Сигнал(ы) от первой кнопки 1310 поступают по первому сигнальному проводу, проходящему по перемычке 1320, через второй ленточный сегмент 1316 для пальца, к линии 1308 связи, которое может включать в себя второй сигнальный провод, объединенный с или подсоединенный к первому сигнальному проводу.
Хотя линия 1308 связи изображена в виде проводного соединения, для реализации линии связи передатчика 1302 с системой 1306 управления может быть использована любая подходящая технология. На фиг.13 показано, что передатчик 1302 и блок питания 1304 надеваются оператором на запястье или руку. Однако передатчик 1302 и блок питания 1304 могут надеваться отдельно или вместе в любом месте на операторе, где это будет удобно, практично, или необходимо в зависимости от конкретного применения. Например, как показано, передатчик 1302 и блок питания 1304 прикреплены к запястью или руке оператора при помощи гибкой и регулируемой (по длине) ленты (манжета) 1321. Лента 1321 может быть легко отсоединена от передатчика 1302 или блока питания (1304), так что все операторы могут иметь отдельные или личные ленте 1321.
Путем отделения передатчик (1302) от системы 1306 управления и соединения их с линией 1308 связи может быть повторно использован один передатчик 1302 с несколькими видами систем 1306 управления. Например, операторы разных смен могут использовать свои собственные системы 1306 управления, например, операторы разных смен могут иметь собственные устройства управления (1306), например, органы управления, носимые на руке или на пальцах, и просто подключать их к соответствующему передатчику 1302 в начале своей смены. Это дополнительно позволяет интегрировать с кнопками 1310 и (1312) радиометки, информация от которых может соответственно передаваться подъемнику-загрузчику 10. При этом подъемник-загрузчик 10 может регистрировать оператора, показатели производительности, и иную соответствующую информацию во время работы.
Таким образом, устройство 70 дистанционного управления является переносным устройством управления, надеваемым оператором и взаимодействующим с подъемником-загрузчиком 10. Пример устройства 70 дистанционного управления включает в себя гибкую ленту 1321, закрепляемую на руке или запястье оператора, и гарнитуру 1314 для пальцев, размещающуюся на указательном пальце оператора так, чтобы первая и вторая кнопки 1310, 1312 были ориентированы в направлении к указательному пальцу оператора.
Согласно данному варианту осуществления, устройство 70 дистанционного управления минимизирует количество и размер предметов, надеваемых на палец (руку) оператора, так как система 1306 управления согласно этому варианту осуществления является единственной системой, надеваемым на палец (руку) оператора. Соответственно уменьшаются помехи, создаваемые устройством 70 дистанционного управления вместе с рабочими функциями оператора, например, при подъеме, переноске и размещении товаров. Устройство 70 дистанционного управления согласно этому варианту осуществления особенно подходит для производственных сред с высокой температурой, так как уменьшается потоотделение оператора, вызываемое компонентами, носимыми на пальце (руке). Более того устройство 70 дистанционного управления согласно этому варианту осуществления также может быть надето на перчатку, таким образом устройство 70 дистанционного управления может использоваться в производственных средах с низкой температурой. Кроме того, устройство 70 дистанционного управления согласно этому варианту осуществления имеет универсальную конструкцию, обеспечивающую «один размер для всех», то есть она может быть использовано операторами с руками разных размеров, а также операторами левшами и правшами.
На фиг.14 и 15 показано, что первая и вторая кнопки 1310 и 1312 системы 1306 управления устройства 70 дистанционного управления могут быть легко доступны и задействованы соответствующим большим пальцем оператора, как схематически показано стрелкой направления 1322. Такое задействование требует обдуманного, но легко осуществимого действия оператора при задействовании первой или второй кнопок 1310, 1312. Кроме того, для задействования первой и/или второй кнопки 1310, 1312 или для выполнения подъемником-загрузчиком 10 конкретной команды могут потребоваться последовательности действий, как описано в настоящем документе. Например, для передачи сигнала или для подъемника-загрузчика 10, чтобы задействовать управление, может понадобиться быстрое двойное нажатие на кнопку, то есть, «двойное нажатие».
Со ссылкой на фиг.15A, как возможное выполнение, любая или обе кнопки 1310 или 1312 могут затребовать многонаправленное функционирование до того как успешное задействование проведено. Например, может понадобится удержание кнопок 1310, 1312 нажатыми, а затем их смещение в боковом направлении, обычно под прямым углом к направлению нажатия кнопки.
Как показано на фиг.16, устройство 70 дистанционного управления может надеваться так, чтобы исключать неудобство для руки или иных помех для оператора Op при использовании обеих рук для захвата товаров. Кроме того, отсутствуют неудобства, связанные с размашистыми движениями конечностями, неудобным расположением органов управления для перемещения или остановки подъемника-загрузчика 10, даже в случае, когда руки оператора Op в конкретный момент времени заняты захватом товара. Например, оператор Op может переместить или остановить подъемник-загрузчик 10, даже когда он переносит товары, например, коробки, и т.п., в обеих руках.
Как показано на фиг.17 система 1306 управления устройства 70 дистанционного управления согласно одному из вариантов осуществления настоящего изобретения, может иметь выступающий/контурный поясок 1330 вокруг каждой первой и второй кнопок 1310, 1312 (на фиг.17 показана только первая кнопка 1310). Для задействования и/или выбора первой или второй кнопки 1310), 1312 оператору необходимо нажать вниз в направлении, показанном стрелкой 1332.
Гарнитура 1314 для пальцев может быть изготовлена из любых материалов, например, из растяжимой ткани, пластика, синтетических и иных материалов, как одного, так и их сочетания. Например, гарнитура 1314 для пальцев, изображенная на фиг.17, включает в себя цельную гибкую ленту, изготовленную из материала, обеспечивающего растяжение первого ленточного сегмента 1316 для пальца, второго ленточного сегмента 1318 для пальца и перемычки 1320 (на фиг.17 показан только первый ленточный сегмент 1316 для пальца), обеспечивая возможность ношения на пальцах разных размеров. Как показано на фиг.18, в качестве еще одного варианта реализации, первый ленточный сегмент 1316 для пальца и второй ленточный сегмент 1318 для пальца могут включать в себя регулируемый тканый материал, например, с защелкой или с крючками, или такой продаваемый материал как контактная ленту, например, под торговой маркой Velcro®, принадлежащей Velcro Industries B.V. Нидерланды.
На фиг.19A-19D изображена еще один пример конструкции дистанционного управления. Устройство 70 дистанционного управления включает единственную кнопку 1334. Кнопка 1334 может быть запрограммирована для выполнения нескольких команд. Например, устройство 70 дистанционного управления может быть настроено передавать команду «стоп» в случае детектирования однократного задействования кнопки 1334. Кроме того, команда «движение» может быть передана в случае двойного нажатия или двойного задействования кнопки 1334 в течение заранее определенного периода времени. Альтернативно устройство 70 дистанционного управления может передавать один или несколько экземпляров одного и того же сигнала на основе количества нажатий, выполняемых оператором, при этом контроллер 103 подъемника-загрузчика 10 принимает решение о том, какую команду выполнять на основании количества полученных сигналов и/или текущего состояния транспортного средства, как описано ранее. Передатчик 1302 и блок питания 1304 могут надеваться при помощи нарукавной повязки, на ремне или рубашке при помощи зажима, или иным способом. Кроме того, линия связи 1308 может быть реализован в виде относительно тонкого провода, который, если требуется, может быть присоединен к катушке 1336 для сматывания, как показано на фиг.19D.
На фиг.20 показано система 1306 управления, содержит две секции 1338, 1340, установленные повортно посредством шарнирного соединения 1342, при этом пружинный элемент (не показан) может быть использовано для закрывания секций 1338, 1340.
На фиг.21A-21B показан еще один пример устройства 70 дистанционного управления. Как показано, система 1306 управления крепится на пальцах оператора при помощи двух зажимов. При этом система 1306 управления может крепиться на левой или правой руке, без каких-либо доработок не требуя подгонки. Например, линия 1308 связи может быть выполнена так, что она может быть «переброшена» его на противоположную сторону системы 1306 управления путем поворота на 180 градусов, и таким образом обеспечивая возможность использования системы 1306 управления на левой руке. Как и в ранее описанных примерах устройств 70 дистанционного управления, органы управления могут быть задействованы при помощи одного жеста руки, даже при переносе взятых товаров, таких, как коробки и т.п.
Как показано, кнопка 1310 перемещения размещается рядом с подпружиненным элементом 1344, откидывающимся вниз, который можно откинуть вниз вручную для открытия доступа к кнопке 1310 перемещения. Как видно на фиг.21B, корпус 1346 передатчика 1302 устройства 70 дистанционного управления имеет дополнительные органы управления. Такие кнопки могут использоваться для переключения подъемника-загрузчика 10 на подачу звукового сигнала или иного обеспечения звукового и/или световой сигнала, для немедленной остановки и/или прекращения выполнения автоматического толчкового перемещения, или выполнения других необходимых функций. Альтернативно, эти органы управления могут служить в качестве резервных (дублирующих) органов 1348 управления, нажимаемых независимо, или запрограммированных на одновременное задействование для перемещения подъемника-загрузчика 10. Кроме того на иллюстрации показана дополнительная кнопка 1350, которая может использоваться, например, как кнопка остановки или движения накатом. Корпус 1346 может располагаться в легкодоступном месте, например, на ремне, рубашке, или брюках (штанах), при помощи зажима 1352. Кроме того линия 1308 связи может втягиваться в передатчик 1302 когда система 1306 управления не надета на оператора.
На Фиг.22A-22B показано еще один пример устройства 70 дистанционного управления. Как показано, передатчик 1302 встроен в систему 1306 управления, что делает ненужной линию 1308 связи, проиллюстрированную в предыдущих примерах. Как показано, для крепления устройства 70 дистанционного управления в области запястья (ладони) оператора используется регулируемый ремешок 1354.
На фиг.23 и Фиг.24 показаны примеры вариантов осуществления, в которых устройство 70 дистанционного управления располагается таким образом, чтобы удерживаться на руке оператора, например, непосредственно над запястьем. Такие устройства 70 дистанционного управления включают в себя сигнальные элементы 1356 оповещения, например, светодиоды (LEDs), световые индикаторы, визуальные индикаторные, звуковые устройства, или иные средства, обеспечивающие подачу визуальных и/или звуковых сигналов о состоянии устройства 70 дистанционного управления и/или связанного с ним подъемника-загрузчика 10, например, когда устройство 70 дистанционного управления находится в режиме двухсторонней связи с соответствующим подъемником-загрузчиком 10. Такие устройства 70 дистанционного управления надеваются оператором путем размещением соответствующего несущей конструкции 1358 на руке, запястье и/или ладони, или Конструкция, содержащая кнопки 1310, 1312, и сигнальные элементы 1356 оповещения устройства 70 дистанционного управления, может соответственно крепиться к несущей конструкции 1358, или конструкция, содержащая кнопки 1310, 1312, и сигнальные элементы 1356 оповещения устройства 70 дистанционного управления может уже заранее быть прикреплена на несущей конструкции 1358. При размещении устройства 70 дистанционного управления в местах, показанных на рисунках, доступ к кнопкам 1310 перемещения и кнопкам 1312 движения накатом требует действий обеих рук, что может быть предпочтительно в некоторых применениях.
На фиг.25A-25C показан еще один пример устройства 70 дистанционного управления. Как показано, органы управления задействуются при помощи большого пальца. Каждая первая и вторая кнопки 1310, 1312 имеет первый переключающий компонент 1310A и 1312A соответственно, каждый из которых может быть задействован общим вторым переключающим компонентом 1313. В частности, устройство 70 дистанционного управления включает в себя первую ленту 1321, служащую гарнитурой для пальцев, и поддерживающую первый переключающий компонент 1310A первой кнопки 1310 и первый переключающий компонент 1312A второй кнопки 1312, расположенных в углублении сбоку указательного пальца оператора. Первый переключающий компонент содержит первый корпус, имеющий углубление, и первый кнопочный контакт 1315, расположенный в этом углублении. Аналогично, второй переключающий компонент содержит второй корпус, имеющий углубление, и второй кнопочный контакт 1317, расположенный в этом углублении.
Соответственно эта гарнитура включает вторую ленту 1323, поддерживающую общий второй переключающий компонент 1313, охватывающий большой палец оператора. Второй переключающий компонент 1313 включает в себя общий контакт 1319 (см. фиг.25A и 25C), обычно расположенный на верхней части выступа, который соответствует обычно по форме впадины элементов первого и второго корпусов первых переключающих компонентов 1310A, 1312A. Для задействования первой кнопки 1310 осуществляется непосредственное электрическое соединение общего контакта (1319) на большом пальце оператора с первым кнопочным контактом 1315, например, направляя выступ второго переключающего компонента 1313 во впадину первого корпуса первого переключающего компонента 1310A. При возникновении электрического контакта между первым кнопочным контактом 1315 и участком общего контактного элемента 1319, выполняется соответствующее управление. Аналогично, для задействования второй кнопки 1312 устанавливается непосредственное электрическое соединение общего контакта 1319 на большом пальце оператора со вторым кнопочным контактом 1317, например, направляя выступ второго переключающего компонента 1313 во впадину второго корпуса первого переключающего компонента 1312A. При установлении электрического контакта между вторым кнопочным контактом 1317 и участком общего контакта 1319, выполняется соответствующая управление. При том, что в данном варианте осуществления описывается непосредственное электрическое соединение между общим контактом 1319 на большом пальце контактами и первым и вторым кнопочными контактами 1315 и 1317 для выполнения соответствующих управлений, также предполагается использование систем на основе бесконтактных способов при приближении, в которых для выполнения соответствующих управлений необходимо только приблизить контакт 1319 на большом пальце к первому и второму кнопочным контакта 1315 и 1317.
На фиг.26-28 показано устройство дистанционного 70 управления в соответствии с еще одним аспектом настоящего изобретения. Устройство 70 дистанционного управления может располагаться таким образом, чтобы удерживаться на руке, запястье, и/или ладони оператора. В соответствии с этим аспектом настоящего и изобретения устройство 70 дистанционного управления надевается оператором путем продвижения ремня 1452 с закрепленной на нем несущей конструкцией 1454 устройства 70 дистанционного управления, на руку или запястье оператора.
Несущая конструкция 1454 вмещает переносной радиопередатчик 1402 и блок питания 1404, как описано в настоящем документе. Несущая конструкция 1454 дополнительно содержит сигнальные элементы 1456, например, светодиоды, индикаторные лампочки, визуальные индикаторы, устройства подачи звуковых сигналов, и другие средства, обеспечивающее визуальные и/или звуковые сигналы, информирующие о состоянии устройства 70 дистанционного управления и/или связанного с ним подъемника-загрузчика 10, например, в случае, когда устройство 70 дистанционного управления 70 имеет возможность осуществлять двухстороннюю связь с соответствующим подъемником-погрузчиком 10. Несущая конструкция 1454 дополнительно содержит соединители 1458 для соединения с другими функциональными элементами, например, кнопки звукового сигнала и/или кнопкой тормоза, т.е. аналогичных второй кнопке 1312, описанной в изложении предыдущих вариантов осуществления.
Устройство 70 дистанционного управления дополнительно включает в себя систему 1406 управления, содержащее жесткий орган 1460 управления и продолговатой гибкой линии 1408 связи между передатчиком 1402/блоком питания 1404, размещенным в несущей конструкции 1454, и системой 1406 управления. Линия 1408 связи в этом варианте осуществления представлена в виде отсоединяемой проводной связи между несущей конструкцией 1454 и системой 1406 управления, чтобы обеспечивать электрическое соединений между радиопередатчиком 1402/блоком питания 1404 и устройством 1460 управления. Путем отделения основания (1454) от системы 1406 управления посредством линии 1408 связи один передатчик 1402/блок питания 1404 может быть использован с различными системами 1406 управления. При этом операторы, работающие в разные смены, могут использовать свои собственные системы 1406 управления, например, в виде органов управления, надеваемых на пальцы, и просто подключать их к соответствующей несущей конструкции 1454 в начале смены.
Конструкция устройства 1460 управления адаптирована для закрепления на руке оператора, например, на одном или более его пальцев. Согласно этому аспекту изобретения устройство 1460 управления, содержащее единственную кнопку 1410, осуществляет связь с передатчиком 1402/блоком питания 1404 посредством линии 1408 связи. Когда устройство 70 дистанционного управления расположено как показано, обеспечивается операция управления одной рукой за счет доступа к кнопке 1410, при котором задействовании кнопки 1410 выполняется передача подъемнику-загрузчику 10 сигнала первого типа, включающего в себя сигнал запрос перемещения, и может также, если требуется, использоваться для передачи подъемнику-загрузчику 10 сигнала второго типа, включающего в себя запрос на остановку или движением накатом, как описано в настоящем документе.
Кнопка 1410 устройства 70 дистанционного управления может быть легко доступна и задействована при помощи большого пальца оператора. Такое задействование требует обдуманного но легко осуществимого действия оператора при задействовании кнопки 1410. Кроме того для задействования кнопки 1410 может понадобится выполнение последовательности действий. Например, двойное нажатие в быстрой последовательности, то есть, «двойное нажатие» может потребоваться для задействования управления, например запроса на перемещение. Кроме того, «двойное нажатие» может понадобиться в случае, если не было задействования транспортного средства, т.е. перемещения подъемника-загрузчика 10, беспроводных команд (радиокоманд) затребованных оператором т.д., в течение некоторого времени, например, 30 секунд. Кроме того, «двойное нажатие» может потребоваться для первой беспроводной команды (радиокоманды) затребованной оператором, после того, как оператор сошел с подъемника-загрузчика 10, т.е. как детектируется датчиком(ами) 58 присутствия, как описано ранее.
Устройство 70 дистанционного управления может надеваться таким образом, чтобы исключить неудобства для рук оператора подъемника-загрузчика 10, а также любые иные помехи действиям двух рук при захвате товаров. Кроме того того, отсутствуют такие неудобства, как необходимость размашистых движений конечностями, неудобное расположение органов управления перемещением или остановкой подъемника-загрузчика 10, даже в случае, когда руки оператора в конкретный момент времени заняты захватом товара. Например, оператор может переместить или остановить подъемник-загрузчик 10 при помощи простых жестов, даже когда он переносит отобранные товары, например, коробки, и т.п. в обеих руках.
Любые описанные конструкции устройства 70 дистанционного управления могут быть оборудованы органами коррекции направления движения и/или в них могут быть интегрированы с органами управления углом поворота подъемника-загрузчика 10. Орган управления углом поворота обычно реализуется при помощи потенциометра, АЦП, или иного подходящего устройства ввода, и может быть размещена в любом удобном месте подъемника-загрузчика 10. При использовании совместно с дополнительными органами управления направлением движения, орган управления углом поворота задает желаемое направление движения подъемника-загрузчика 10. Например, оператор может расположить подъемник-загрузчик 10 в проходе параллельно ряду стеллажей. При помощи данных обратной связи угла поворота, как описано в настоящем документе, в направление (курс) движения подъемника-загрузчика 10 можно поддерживаться параллельно стеллажам, когда подъемник-загрузчик 10 движется по проходу. Орган управления углом поворота предотвращает уход подъемника-загрузчика 10 с курса. При такой конструкции команда на перемещение от устройства 70 дистанционного управления вызывает перемещение подъемника-загрузчика 10 прямо вдоль направления курса движения, установленного контроллером 112 управления движения.
Система, обеспечивающая функции управления толчковым перемещением, изложенная в настоящем документе, может осуществлять выполнение дополнительных расширенных функций для обеспечения соответствия конкретным эксплуатационным требованиям. Например, передатчики могут быть оборудованы командой «общей остановки», при помощи которой могут быть отключены все подъемники-загрузчики 10, действующие с дистанционным управлением, в радиусе действия передатчика. Таким образом, все приемники могут быть запрограммированы или настроены иным образом, чтобы распознавать команду остановки, например, при помощи глобальной или общей командной последовательности.
Во всех описанных примерах систем антенна для передатчика может располагаться в корпусе передатчика, располагаться на гарнитуре, например, путем прикрепления антенны к контактной ленте Velcro, ремням, лентам, или иным компонентам, связанным с передатчиком, которые надеваются оператором, путем размещения вместе с проводкой между корпусом передатчика и органами управления, и т.п.
Кроме того, передатчик может быть направленным. Например, на подъемнике-загрузчике 10 может быть оборудована целевая метка, например, как часть приемника 102 (см. фиг.2) или антенны 66 (см. фиг 1). Таким образом, оператору необходимо направить передатчик устройства 70 дистанционного управления на метку или в ее направлении, чтобы ввести в действие операцию управления, например, команду на толчковое перемещение, которая принята подъемником загрузчиком 10. Альтернативно, некоторые команды могут быть не направленными, а другие - направленными. Например, выполнение общей остановки (при наличии такой функции) может не требовать детектирования посредством метки. С другой стороны, для выполнения толчкового перемещения может потребоваться детектирование посредством метки. Целевое детектирование может выполняться, например, при помощи инфракрасной или иными приемлемыми технологиями.
Со ссылкой на фиг.29 и фиг.30 погрузочно-разгрузочное транспортное средство 2010, согласно другому аспекту изобретения включает в себя грузозахватный узел 2012, отделение 2013 оператора, и приводной узел 2014. Грузозахватный узел 2012 включает в себя пару вил 2016, при этом каждая из вил 2016 имеет грузонесущий колесный узел 2018. Грузозахватный узел 2012 может включать в себя другие грузовые устройства в дополнение или вместо описанной конструкции вил 2016, например, решетку ограждения груза, подъемные вилы ножничного типа, выдвижные и отдельно регулируемые по высоте вилами, мачту, грузовую платформу, комплектовочный контейнер, или иные опорные конструкции устанавливаемые на вилы 2016, или иным образом предусмотренные для погрузки-разгрузки грузов, поддерживаемых и перевозимых подъемником-загрузчиком 2010.
Как показано на фиг.29 и фиг.30, транспортное средство 2010 включает в себя первый детектор 2050 препятствий, и вторые детекторы 2052A и 2052B препятствий, установленных на приводной узел 2014. Вторые детекторы 2052A и 2052B препятствий размещены на некотором расстоянии друг от друга вдоль горизонтальной оси HA транспортного средства, устанавливая горизонтальное направление, см. фиг.30. Первый детектор 2050 препятствий установлен на расстоянии от вторых детекторов второго 2052A и 2052B препятствий вдоль продольной оси VA транспортного средства (2010) устанавливая вертикальную плоскость, т.е., вторые детекторы 2052A и 2052B препятствий расположены ниже, т.е., ближе к поверхности земли, чем первый детектор 2050 препятствия, см фиг.29.
Согласно этому аспекту настоящего изобретения первый детектор 2050 препятствий может включать в себя лазерный датчик обнаружения препятствий, который может детектировать объекты, например, в первой, второй, и третьей зонах Z1, Z2, Z3, при этом первая, вторая, и третья зоны Z1, Z2, Z3 могут быть плоскостными участками пространства, см. фиг.29 и фиг.30. Вторая зона Z2 может включать в себя «зону остановки», а первая и третья зоны Z1 и Z3 могут включать в себя левую и правую «буферные зоны направлений», такие, как зона остановки, левая и правая буферные зоны направлений, описанные в заявке на патент США №12/649,815, поданной 30 декабря 2009 г., с названием «STEER CORRECTION FOR A REMOTELY OPERATED MATERIALS HANDLING VEHICLE», включенной в настоящий документ путем ссылки. Необходимо отметить, что первый детектор 2050 препятствий может иметь возможность детектировать объекты в дополнительных или меньшем количестве зон, чем три описанные зоны Z1, Z2, Z3.
Согласно данному аспекту настоящего изобретения, вторые датчики 2052A и 2052B препятствий могут быть выполнены в виде датчиков координатного лазера, разделенные способных детектировать объекты, находящиеся между одной или более зон Z1, Z2, Z3, и транспортным средством 2010, т.е., находящиеся ниже одной или более зон Z1, Z2, Z3, как показано на фиг.29, и имеют возможность предпочтительно детектировать объекты, находящиеся ниже второй зоной Z2. Вторые детекторы 2052A и 2052B препятствий имеют возможность детектировать объекты, расположенные в недектируемой зоне DZ первого детектора 2050 препятствий, см фиг.29, т.е. недетектируемая зона DZ определяется как область, расположенная ниже зон Z1, Z2, Z3, и, таким образом, не обнаруживаемая первым детектором 2050 препятствий. Таким образом, первый детектор 2050 препятствий служит для детектирования объектов, расположенных вдоль пути перемещения приводного узла 2014 за недетектируемой зоной DZ, а вторые детекторы 2052A и 2052B препятствий служат для обнаружения объектов, находящихся вдоль пути движения приводного узла 2014 в недетектируемой зоне DZ, которая располагается только перед транспортным средством 2010, как показано на фиг.29.
Используемая терминология служит исключительно для целей описания конкретных вариантов осуществления, и не имеет цели ограничить настоящее изобретение. При использовании в настоящем документе формы слов в единственном числе включают формы множественного числа, если из контекста явно не следует иное. Также следует отметить, что слова «включает в себя» и/или «включая в себя», используемые в настоящем описании, означают наличие указанных функций, объектов, процессов, операций, элементов, и/или узлов, но не исключают наличия или дополнения одной или более других функций, объектов, процессов, операций, элементов, узлов, и/или их групп.
Описание настоящего изобретения представлено для целей представления и разъяснения, однако оно не может служить в качестве исчерпывающего описания или ограничивать настоящее изобретение в предлагаемом виде. Специалистам в данной области техники очевидны различные изменения и дополнения, которые не выходят за пределы сущности и объема изобретения. Некоторые варианты реализации были выбраны и описаны с целью наилучшего объяснения принципов настоящего изобретения и его практического применения, и с целью обеспечения понимания специалистами в данной области техники настоящего изобретения в различных вариантах его осуществления с различными изменениями и дополнениями, применимыми для рассматриваемых конкретных целей.
Из изложения изобретения, представленного в настоящей заявке, выполненного в виде подробного описания и путем ссылок на некоторые варианты его осуществления, очевидна возможность различных дополнений и изменений, которые не выходят за пределы сущности и объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ И СПОСОБЫ ЕЕ ЭКСПЛУАТАЦИИ | 2007 |
|
RU2428744C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТ И СПОСОБЫ УПРАВЛЕНИЯ ЕЮ | 2011 |
|
RU2555068C2 |
| ОТСЛЕЖИВАНИЕ ОБЪЕКТОВ И МАНЕВРЫ РУЛЕНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2578831C9 |
| МАНЕВРЫ ПРИ УПРАВЛЕНИИ ПОВОРОТОМ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2564928C1 |
| ОДНОВРЕМЕННОЕ ЗОНДИРОВАНИЕ НЕСКОЛЬКИХ ЗОН ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ УСТРОЙСТВ | 2009 |
|
RU2534008C2 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА И СПОСОБ КОРРЕКТИРОВКИ НАПРАВЛЕНИЯ ЕЁ ДВИЖЕНИЯ | 2009 |
|
RU2550560C2 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА | 2009 |
|
RU2568046C2 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНОЙ | 2013 |
|
RU2580814C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2016 |
|
RU2698281C2 |
| ИНТЕРФЕЙС ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ | 2016 |
|
RU2719042C1 |
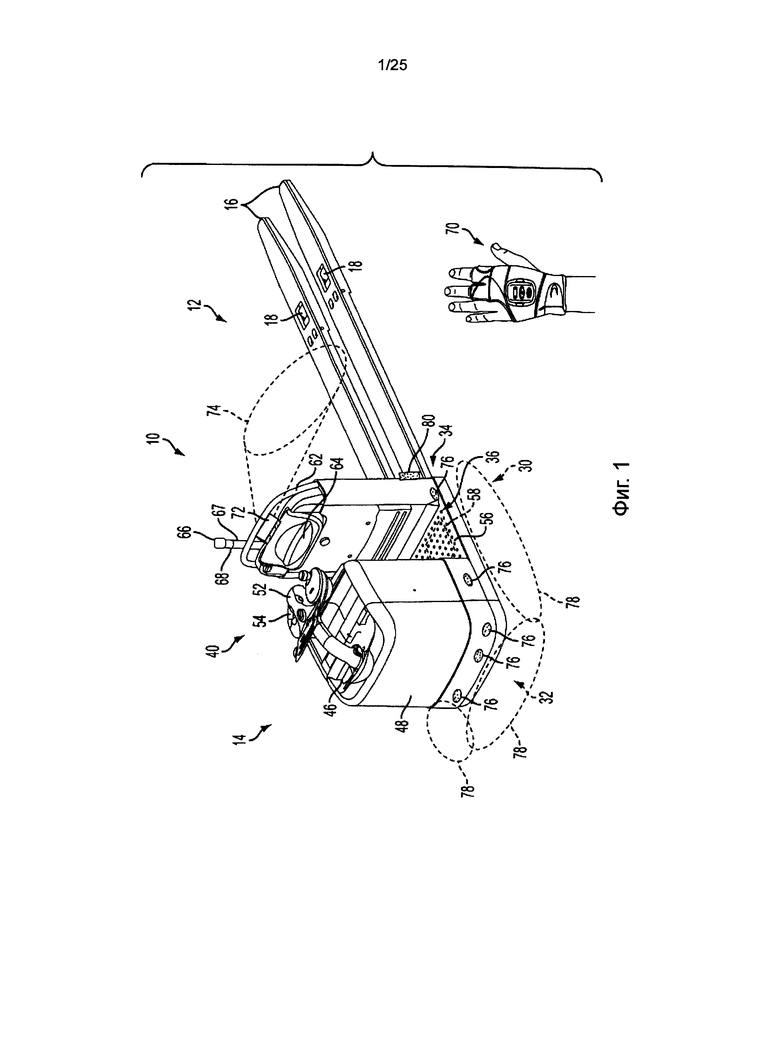
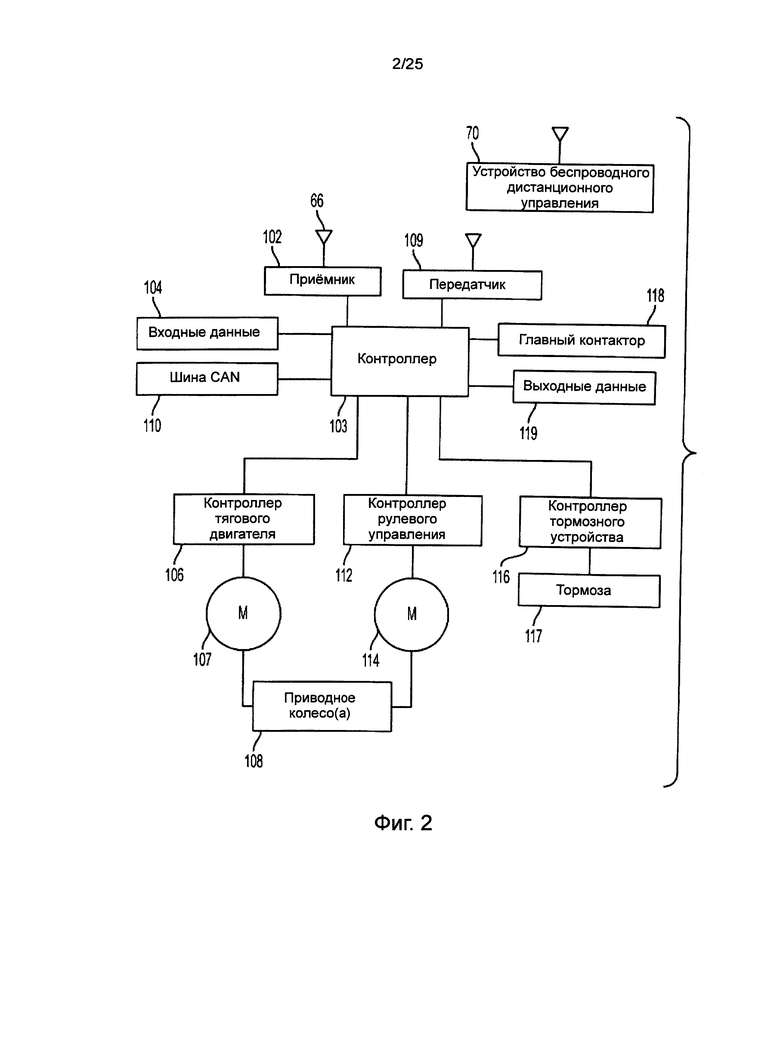
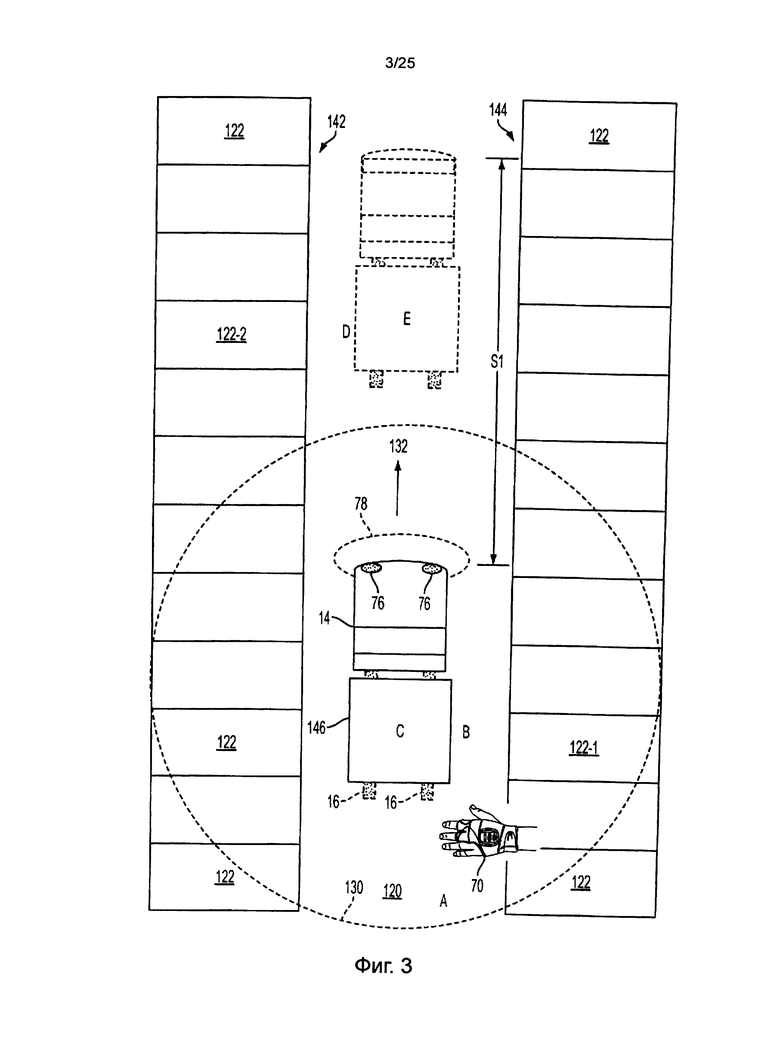
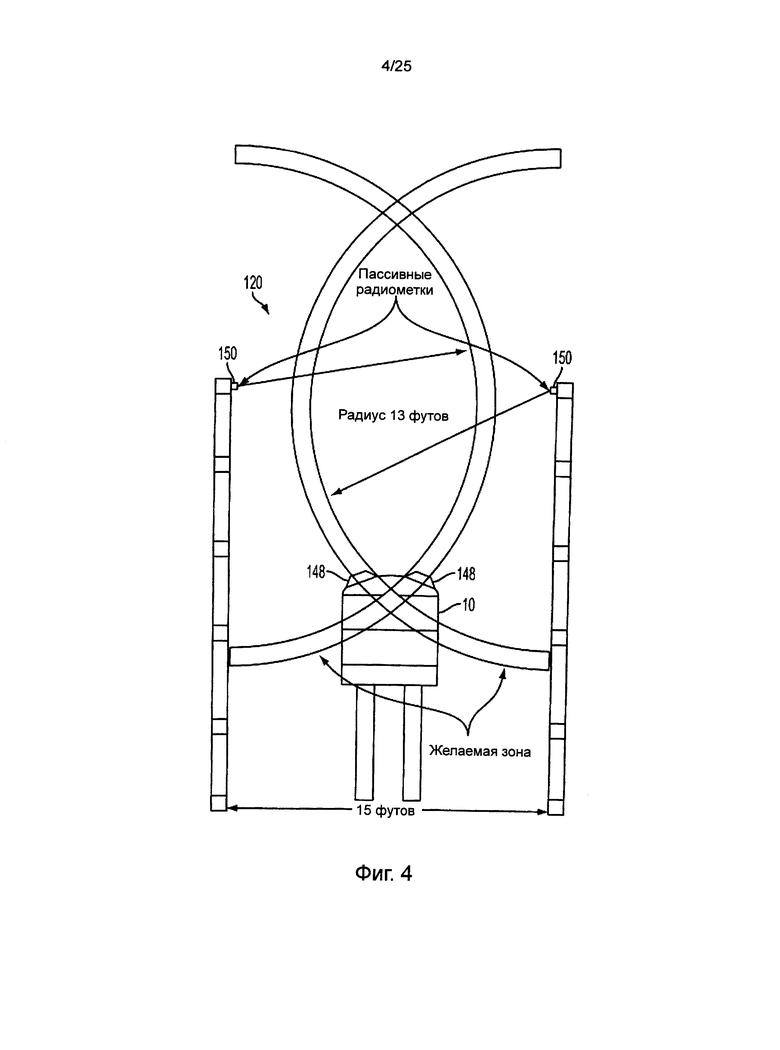
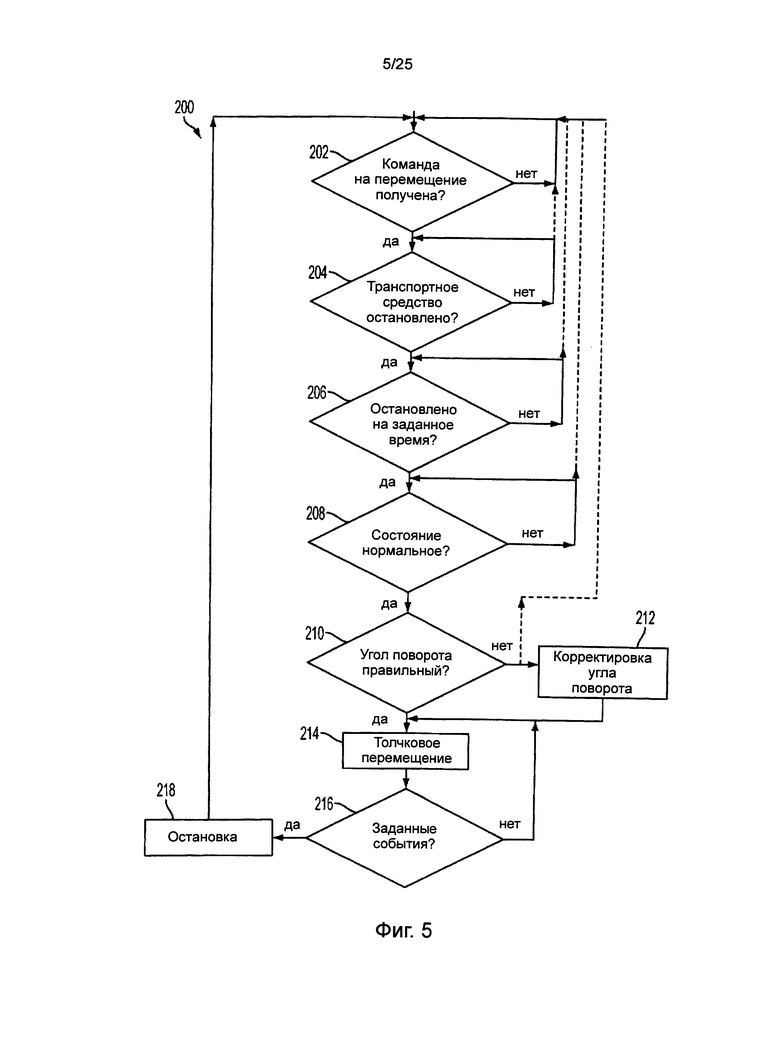
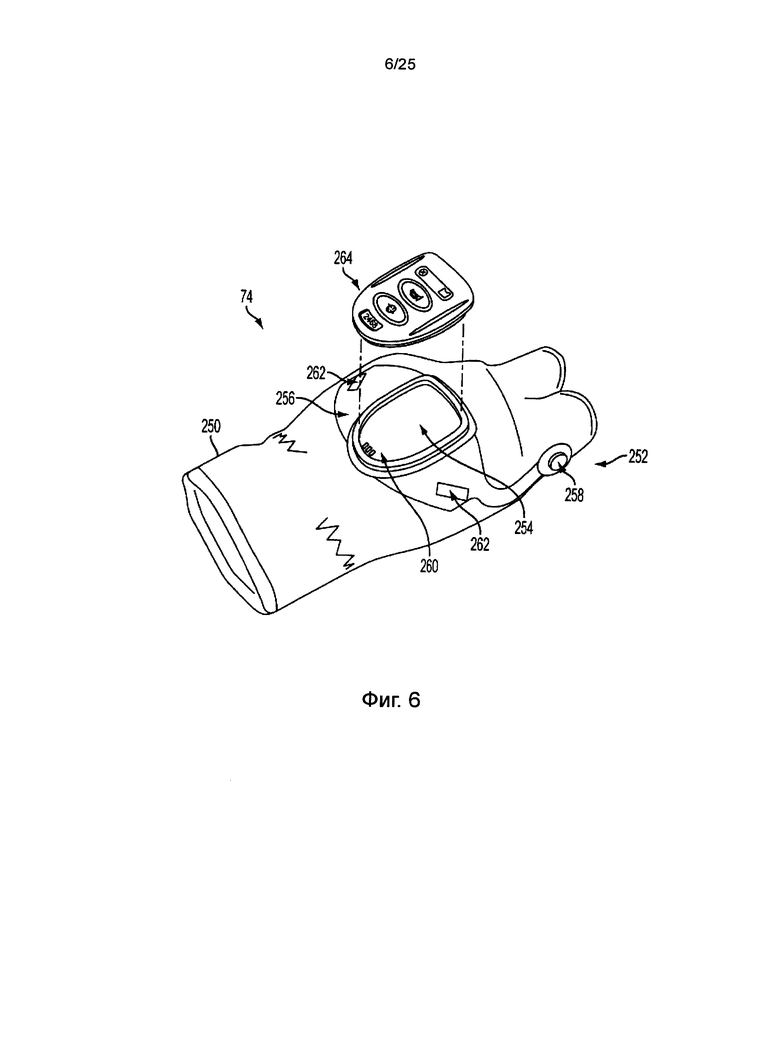
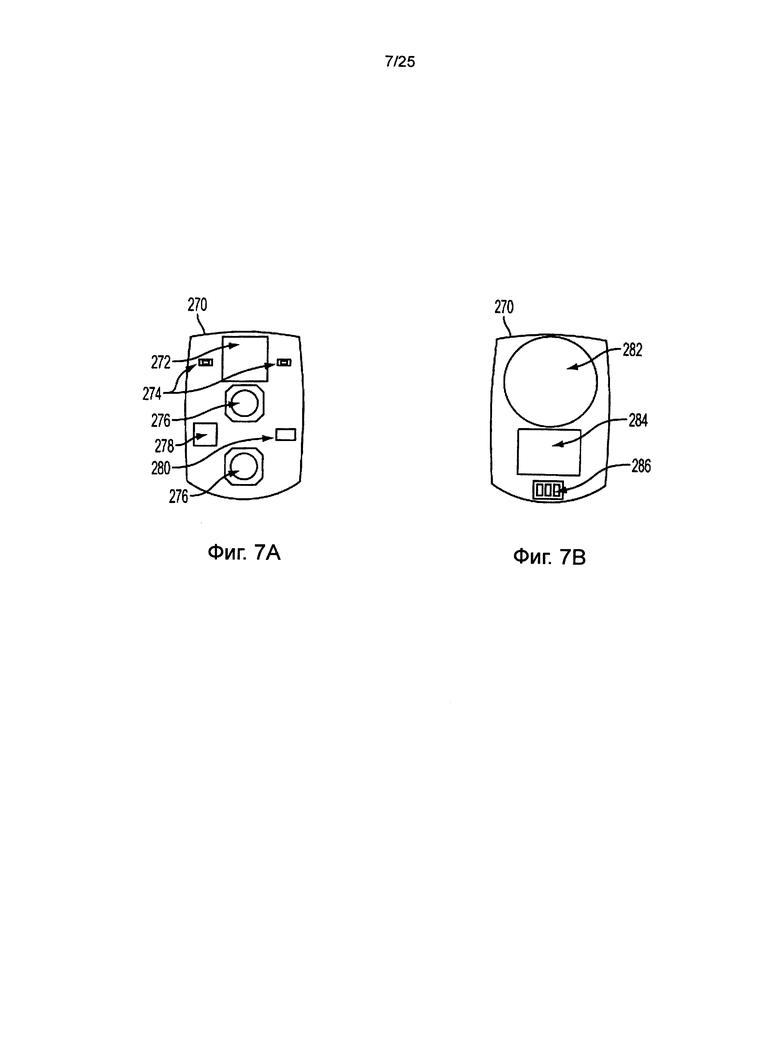
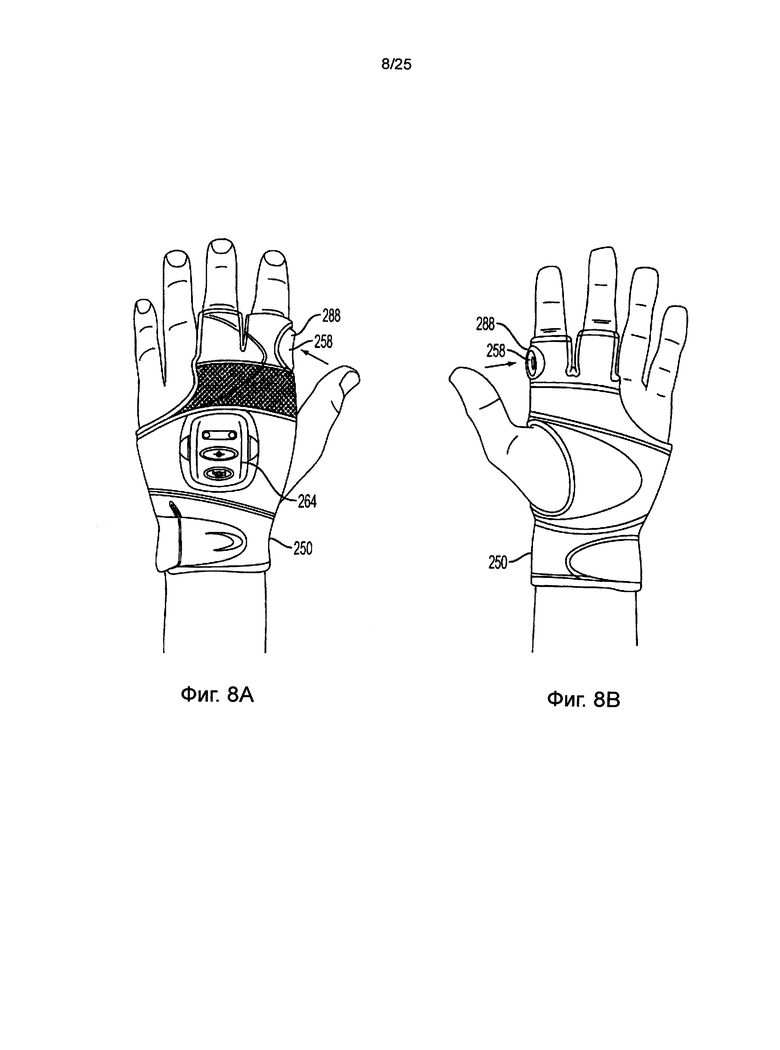
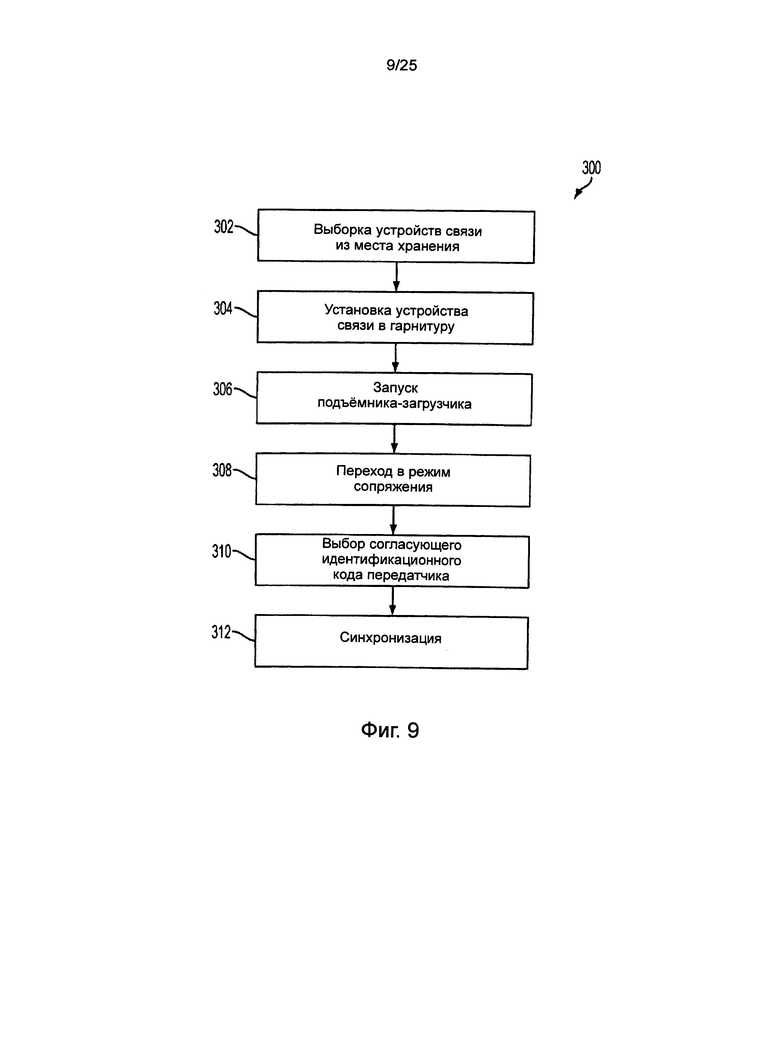
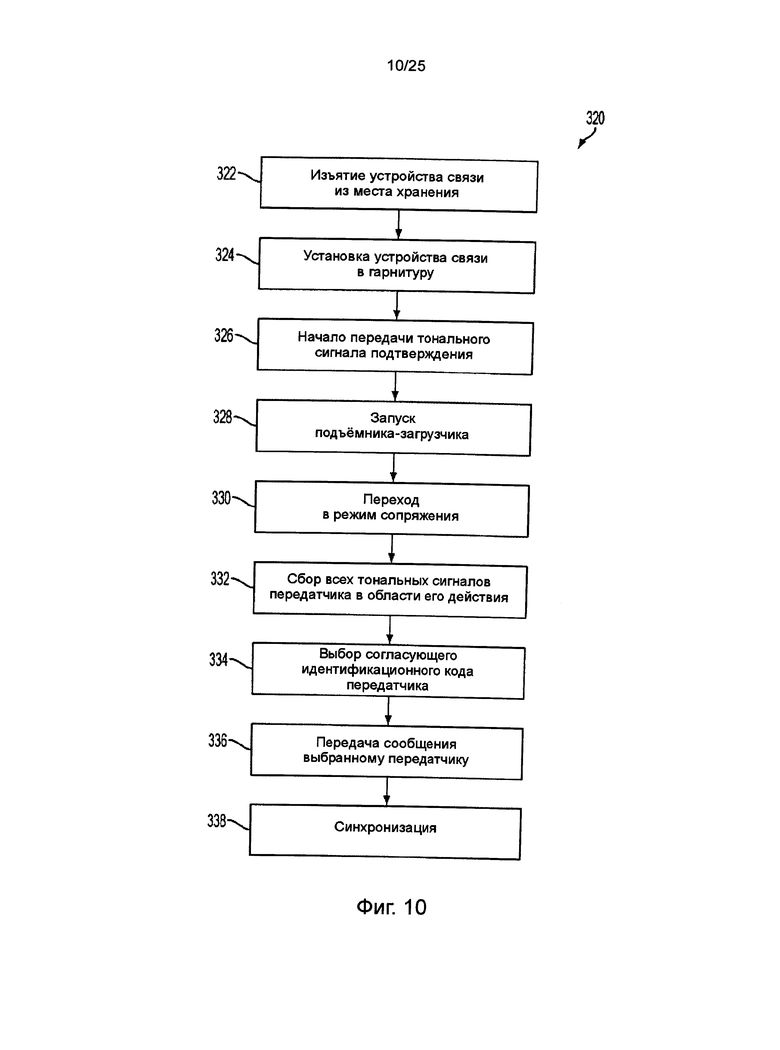
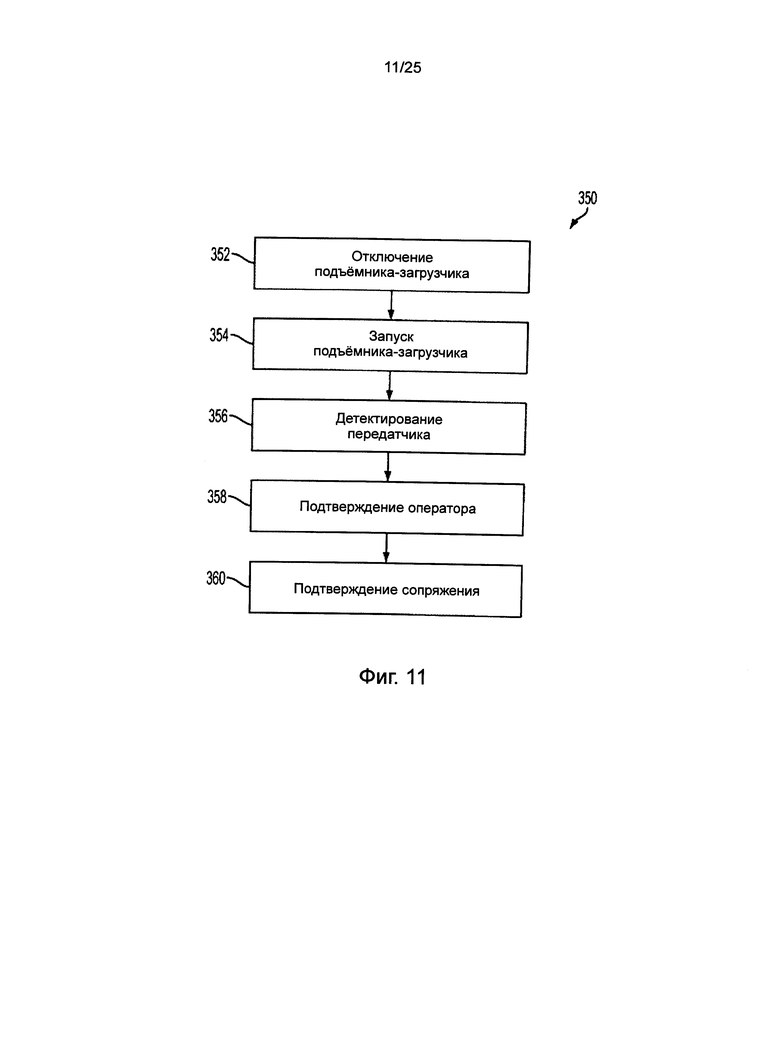
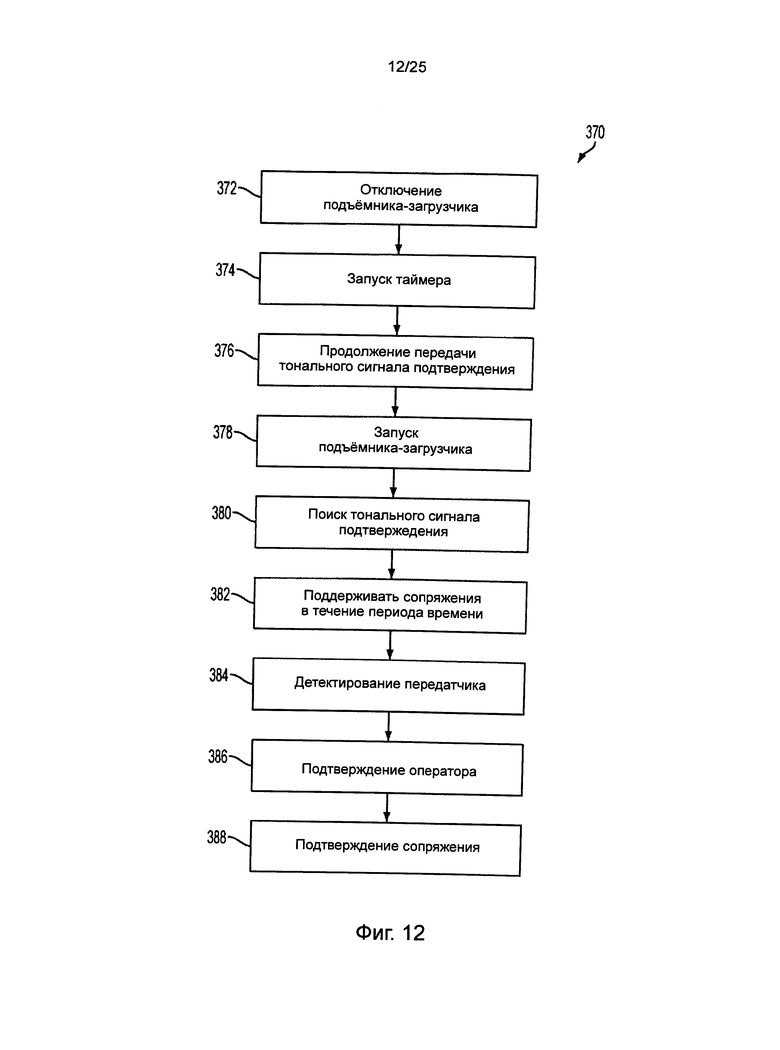
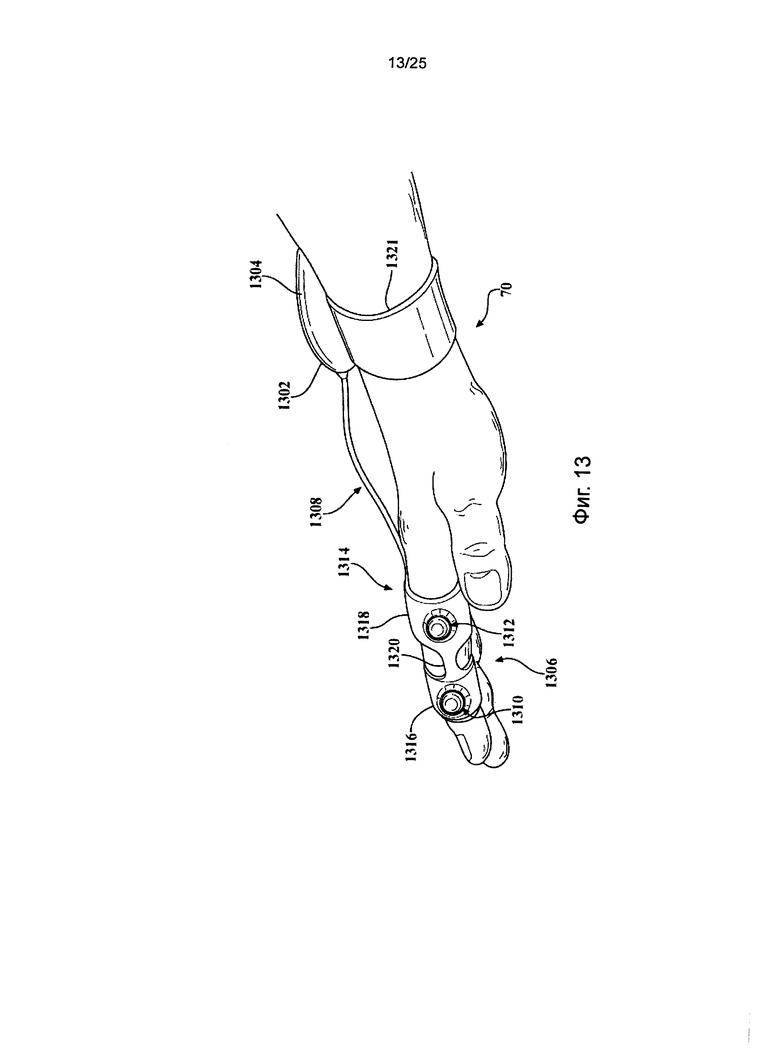
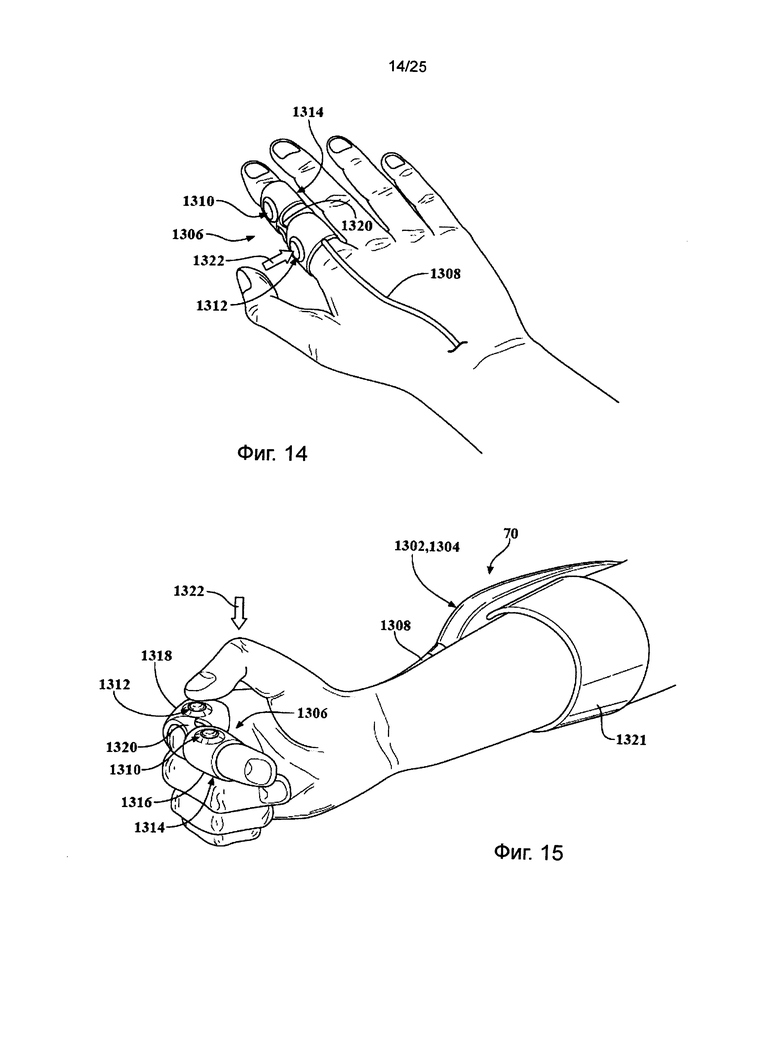
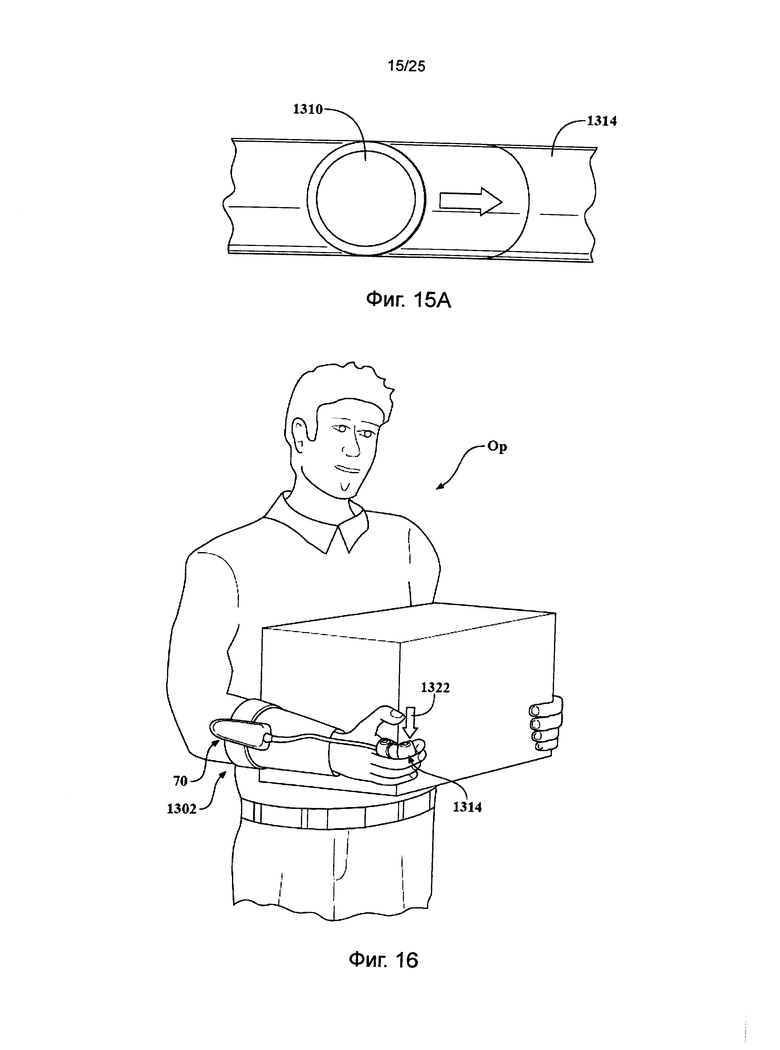
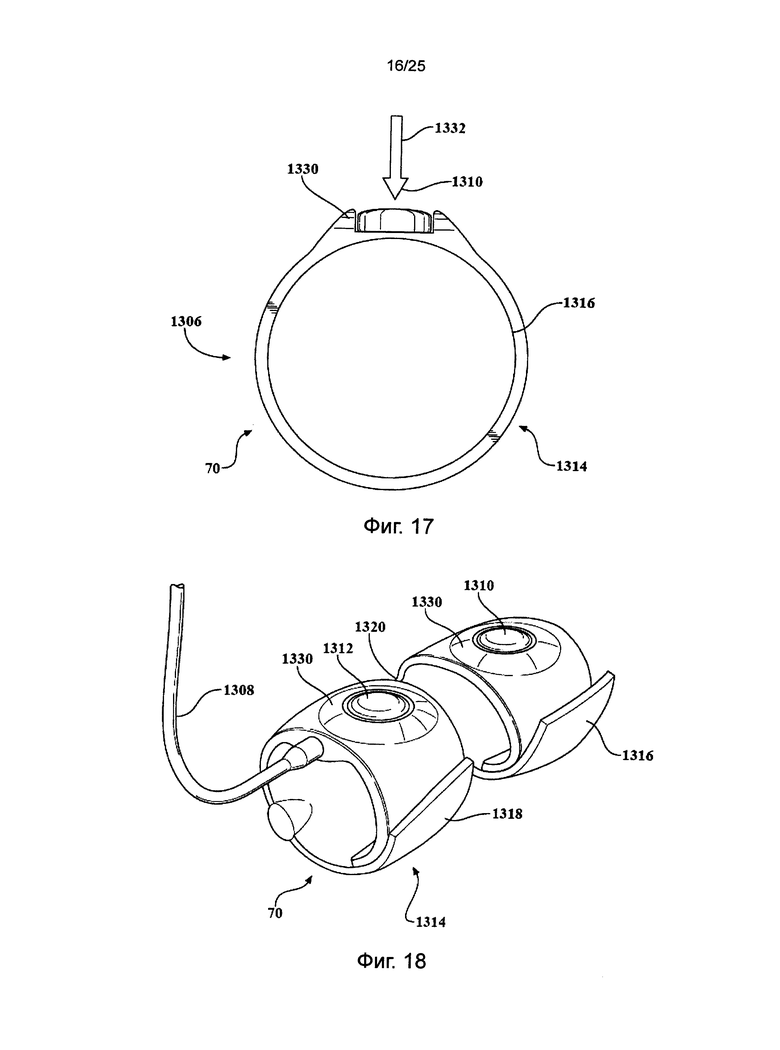
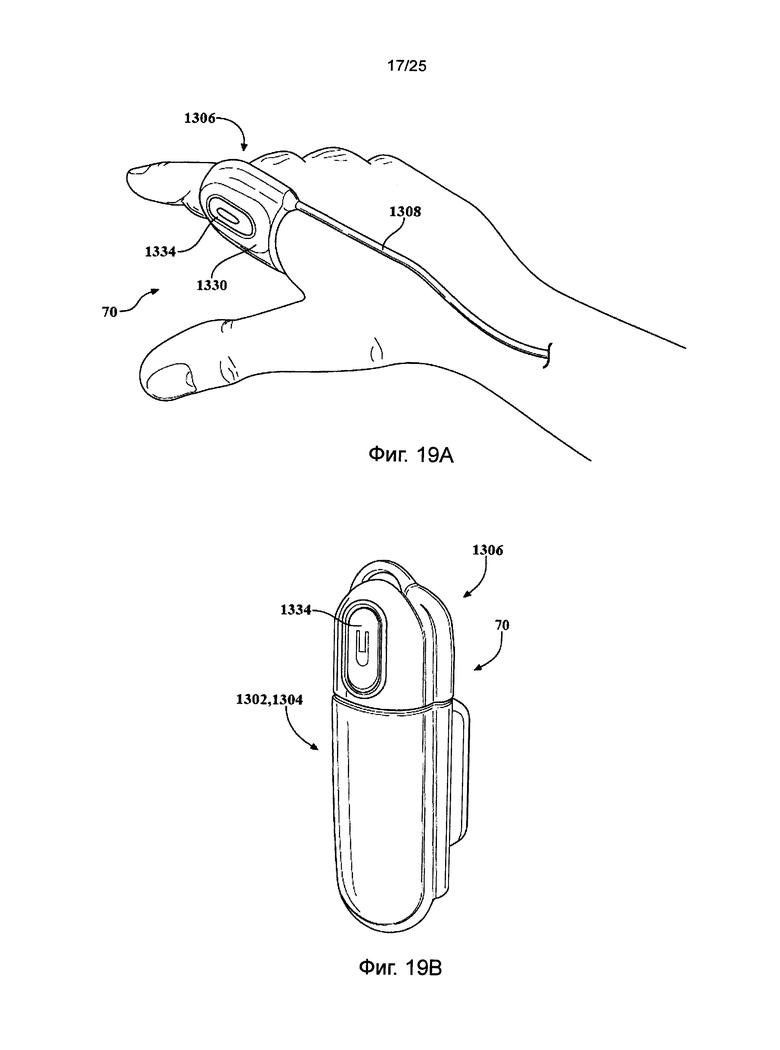
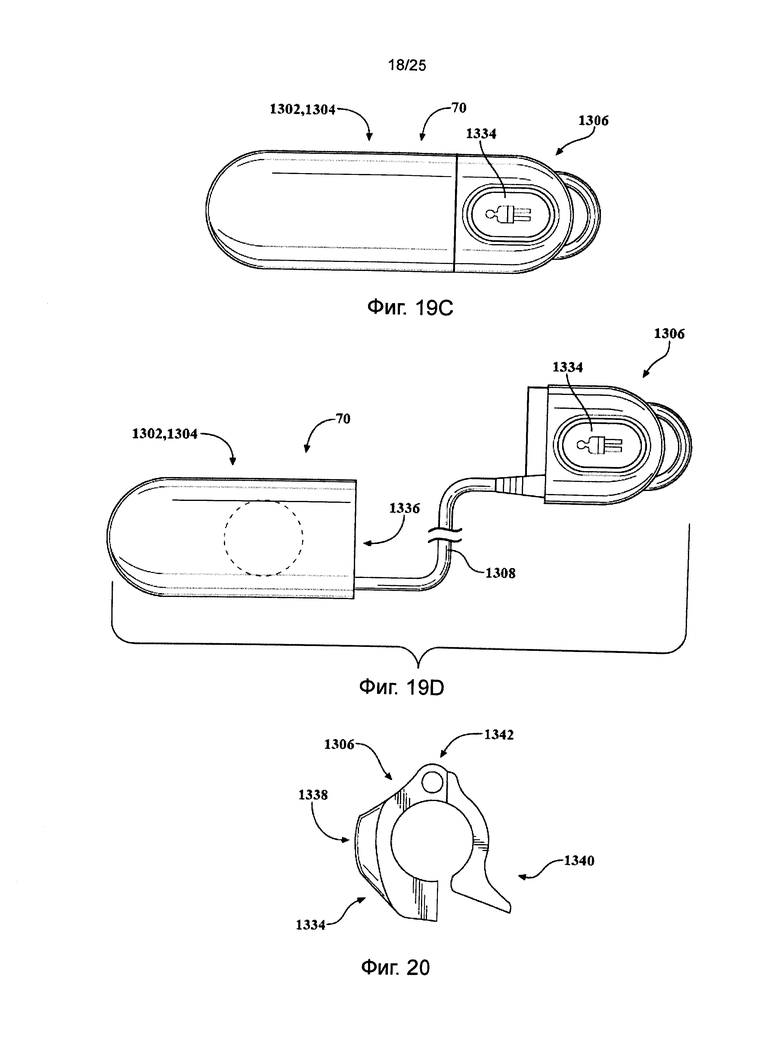
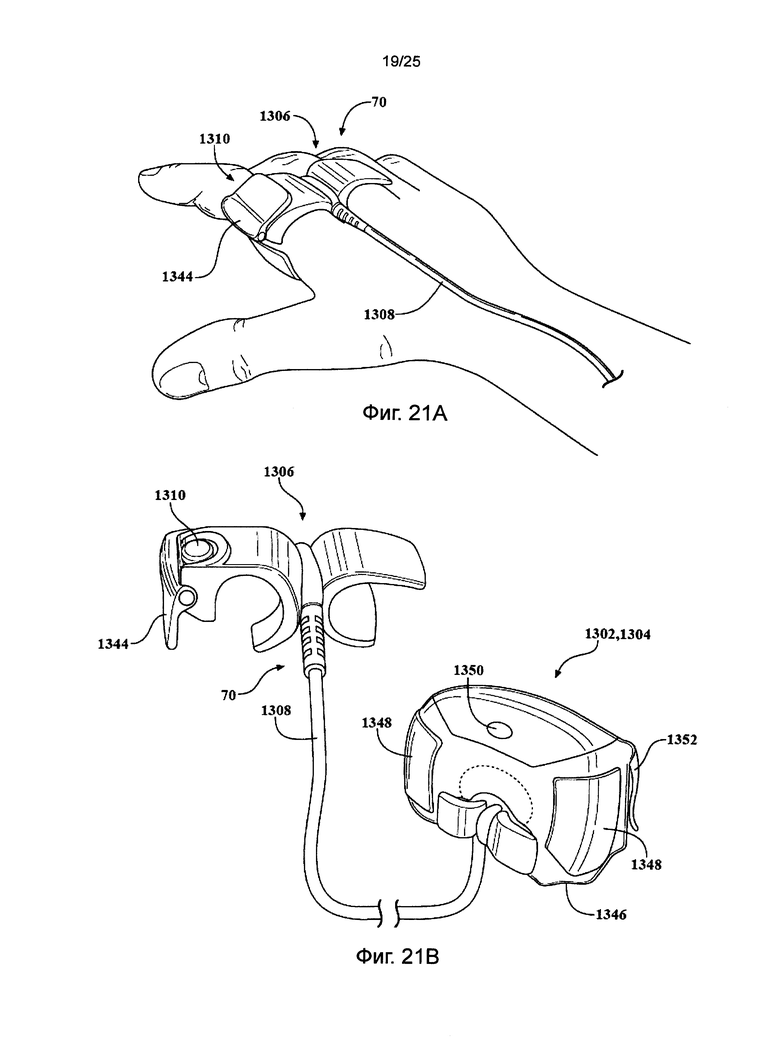
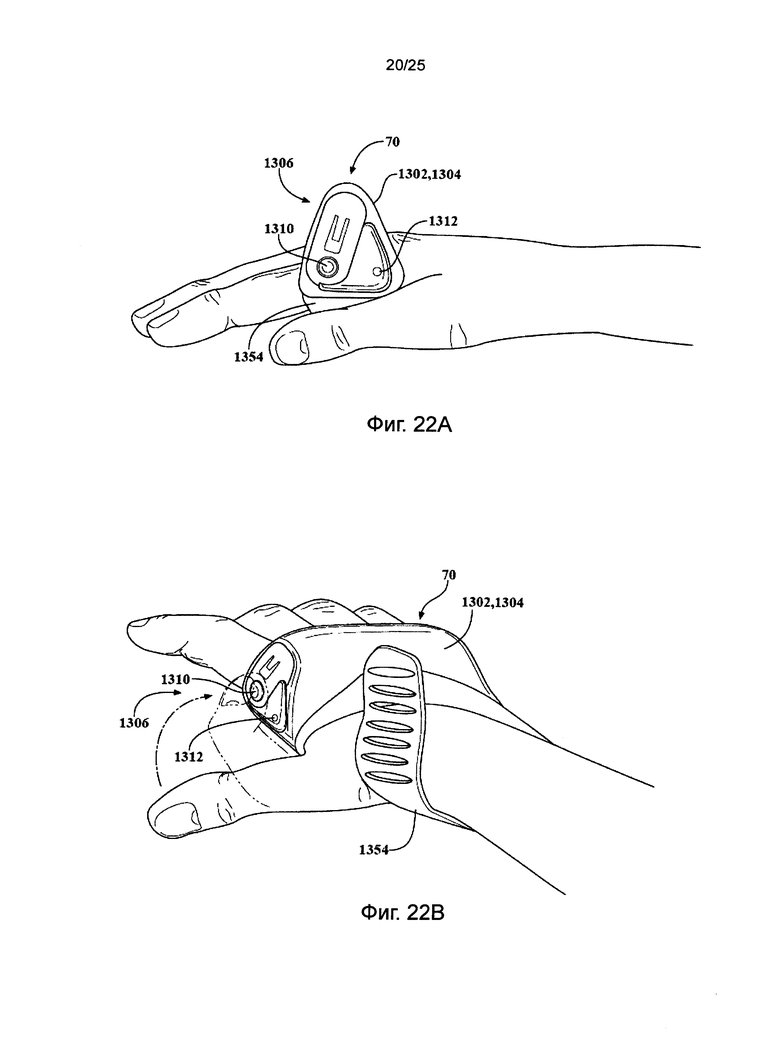

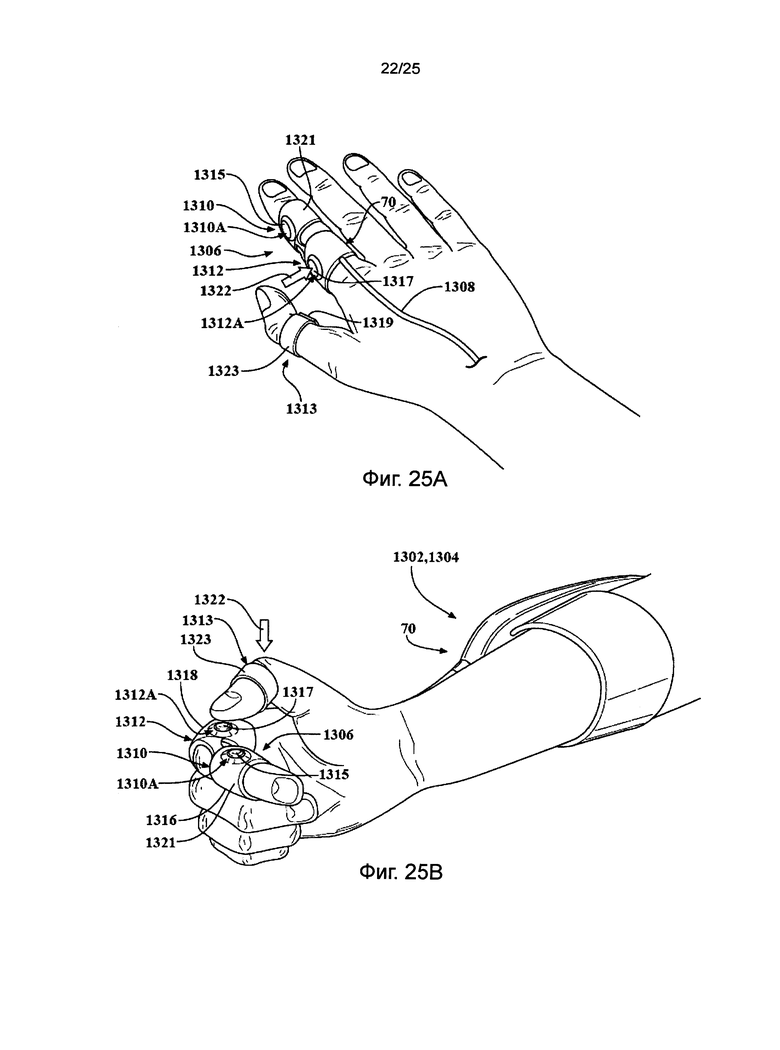
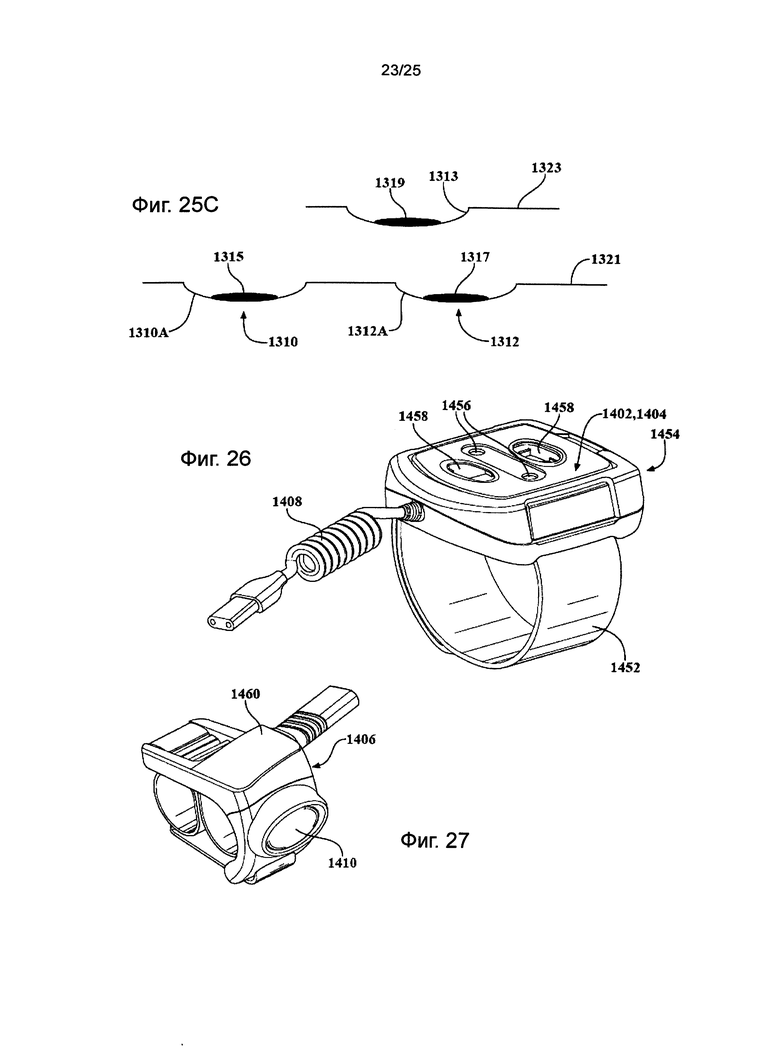
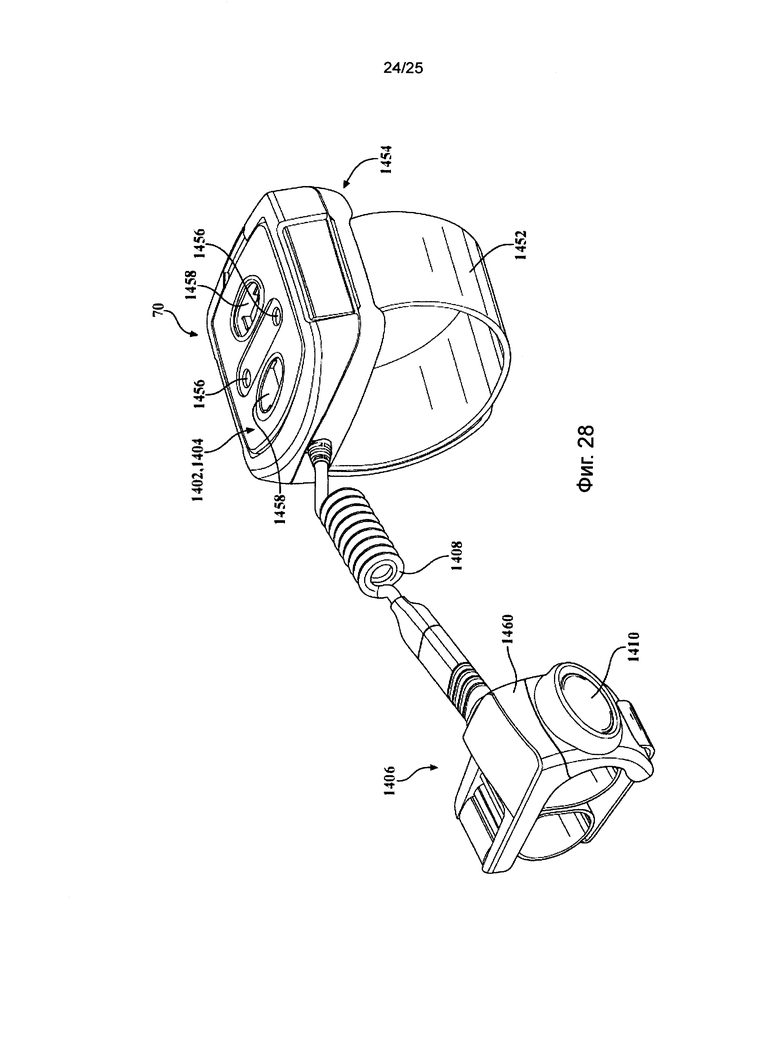
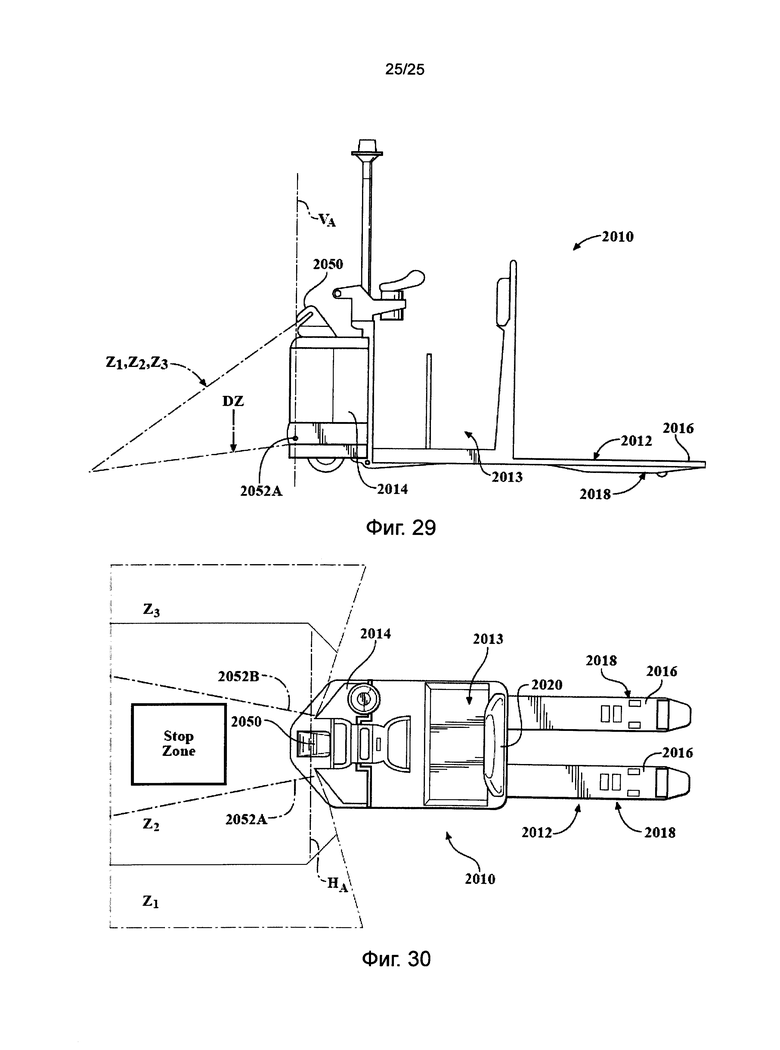
Погрузочно-разгрузочное средство (2010) содержит приводной узел (2014), грузозахватный узел (2012), первый детектор препятствия (2050), вторые детекторы препятствий (2052A, 2052B). Первый детектор препятствий (2050) является датчиком координатного лазера. Первый детектор препятствий детектирует объекты, расположенные вне недетектируемой зоны (DZ) первого детектора (2050). Зоны сканирования (Z1, Z2, Z3) первого детектора препятствий (2050) распространяются под углом вниз к поверхности пола перед приводным узлом (2014). Вторые детекторы (2052A, 2052B) установлены ниже, т.е. ближе к поверхности земли, чем первый детектор (2050). Вторые детекторы детектируют объекты, расположенные в недетектируемой зоне (DZ). Достигается повышение безопасности. 3 з.п. ф-лы, 30 ил. 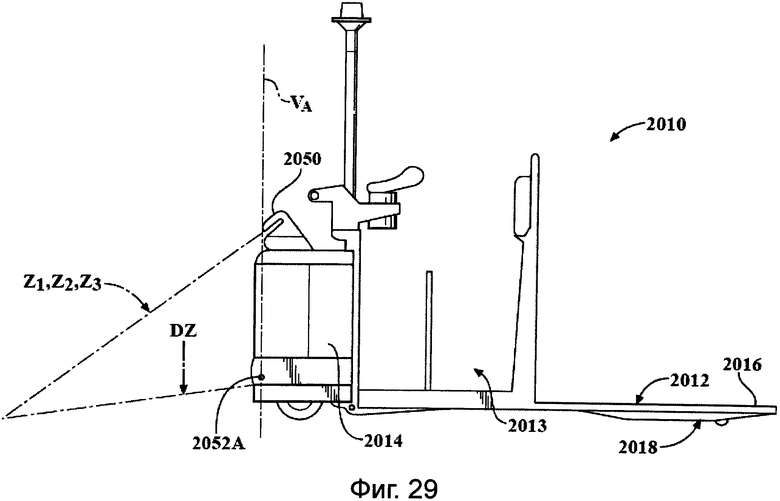
1. Погрузочно-разгрузочное транспортное средство, содержащее
приводной узел,
грузозахватный узел,
по меньшей мере один первый детектор препятствия, содержащий лазерный датчик обнаружения, установленный в первой позиции на упомянутом приводном узле для детектирования объектов, находящихся в зоне сканирования на пути перемещения упомянутого приводного узла, вне недетектируемой зоны упомянутого первого детектора, причем зона сканирования по меньшей мере первого детектора препятствий распространяется от по меньшей мере первого детектора препятствий под углом вниз к поверхности пола перед упомянутым приводным узлом, и
по меньшей мере один второй детектор препятствия, установленный во второй позиции на упомянутом приводном узле ниже упомянутого первого детектора в вертикальном направлении, служащий для детектирования объекта в упомянутой недетектируемой зоны ниже упомянутой зоны сканирования упомянутого первого детектора препятствия.
2. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутый лазерный датчик обнаружения датчик координатного лазера способен детектировать объект в любых первой, второй или третьей зонах, причем первая и третьи зоны включают в себя буферные зоны, используемые для корректирующих маневров, а вторая зона содержит зону, используемую для остановки транспортного средства.
3. Погрузочно-разгрузочное транспортное средство по п. 1 или п. 2, в котором по меньшей мере один второй детектор препятствия содержит первый и второй датчики координатного лазера, разделенные друг от друга в горизонтальном направлении.
4. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутая недетектируемая зона находится прямо перед транспортным средством и ниже упомянутой зоны сканирования упомянутого первого детектора препятствия.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ ВЫПЛАВКИ СТАЛИ В МАРТЕНОВСКОЙ ПЕЧИ И МАРТЕНОВСКАЯ ПЕЧЬ | 2005 |
|
RU2299246C1 |

