ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству определения положения, которое обнаруживает рабочее положение поршня цилиндра давления текучей среды (гидравлического или пневматического цилиндра), и более конкретно к устройству определения положения, в котором датчик положения прикрепляется к корпусу цилиндра, используя крепежную ленту.
УРОВЕНЬ ТЕХНИКИ
Обычно устройство определения положения прикрепляется к цилиндру давления текучей среды для обнаружения рабочего положения поршня и использования сигнала обнаружения в качестве сигнала для управления цилиндром давления текучей среды. Это устройство определения положения обнаруживает магнитное поле прикрепленного к поршню постоянного магнита с помощью магниточувствительного датчика положения, закрепленного на наружной поверхности корпуса цилиндра. Для крепления датчика положения на наружной поверхности корпуса цилиндра используются различные приспособления.
Например, в Патентном документе 1 описано устройство определения положения, в котором держатель датчика, имеющий паз для вставки датчика, включающий в себя узкое отверстие, закреплен на наружной поверхности корпуса цилиндра с помощью крепежной ленты (ленты типа пояса), датчик положения вставляется в паз для вставки датчика и датчик положения закрепляется в держателе датчика с помощью фиксирующего винта, который ввинчивается в датчик положения. В этом устройстве определения положения регулировка позиции датчика положения осуществляется посредством ослабления фиксирующего винта, перемещения датчика положения в оптимальную позицию в держателе датчика для осуществления обнаружения и затягивания фиксирующего винта уже в этой позиции.
Однако способ, при котором только датчик положения перемещается для регулировки его позиции, как в описанном устройстве определения положения, является недостаточно гибким для регулировки позиции. Например, если имеются ограничения для места крепления крепежной ленты относительно корпуса цилиндра, будет недостаточно перемещать только датчик положения.
Регулировка позиции может также осуществляться посредством перемещения держателя датчика. Однако в этом случае держатель датчика и крепежную ленту будет необходимо соединить с помощью крепежного винта и удлиненного отверстия, и держатель датчика легко сможет смещаться вдоль удлиненного отверстия под действием вибрации или т.п.
ПЕРЕЧЕНЬ ЦИТИРУЕМЫХ ДОКУМЕНТОВ
Патентный документ 1: Опубликованная без проведения экспертизы заявка на патент Японии № 2004-125150
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Задача настоящего изобретения состоит в создании устройства определения положения для цилиндра давления текучей среды, в котором датчик положения может быть закреплен с возможностью регулировки положения на корпусе цилиндра с помощью крепежной ленты и держателя датчика, причем обеспечивается высокая степень свободы при регулировке позиции и датчик положения не перемещается под действием вибрации.
РЕШЕНИЕ ПРОБЛЕМЫ
Для решения этой задачи согласно настоящему изобретению предложено устройство определения положения, содержащее датчик положения, который обнаруживает положение поршня цилиндра давления текучей среды (гидравлического или пневматического цилиндра), держатель датчика, который удерживает с возможностью регулировки позиции датчик положения, и крепежную ленту, которая закрепляет держатель датчика на наружной периферии корпуса цилиндра.
Крепежная лента имеет основное тело ленты, окружающее наружную периферию корпуса цилиндра, и пару зажимных частей, образованных на обоих концах основного тела ленты и обращенных друг к другу, держатель датчика зажимается между парой зажимных частей, и держатель датчика закрепляется между зажимными частями посредством перемещения пары зажимных частей в направлении друг к другу с помощью крепежного винта.
Держатель датчика включает в себя удерживающий элемент для датчика, имеющий паз для крепления датчика, в котором размещается датчик положения, и крепежный элемент, который зажимается между парой зажимных частей крепежной ленты, причем удерживающий элемент для датчика и крепежный элемент выполнены как отдельные элементы. Удерживающий элемент для датчика размещается таким образом, что он контактирует с наружной периферией корпуса цилиндра, при этом паз для крепления датчика ориентирован в направлении оси корпуса цилиндра, крепежный элемент размещается таким образом, что он охватывает с двух сторон удерживающий элемент для датчика, при этом удерживающий элемент для датчика размещается в посадочном пазу на нижней поверхности крепежного элемента, крепежный элемент и удерживающий элемент для датчика закрепляются друг с другом посредством затягивания крепежного винта и закрепления крепежного элемента между зажимными частями и ослабление крепежного винта позволяет удерживающему элементу для датчика перемещаться относительно крепежного элемента в направлении оси корпуса цилиндра.
Согласно одному варианту выполнения настоящего изобретения датчик положения имеет световой индикатор, который загорается во время работы, и фиксирующий винт датчика, который закрепляет датчик положения в пазу для крепления датчика; крепежный элемент имеет, на одном конце и на другом конце в направлении вдоль паза для крепления датчика, полую часть и прозрачное окно, которые имеют такую глубину, что они продолжаются от верхней поверхности крепежного элемента до посадочного паза, полая часть используется для поворота фиксирующего винта датчика с помощью инструмента, а прозрачное окно используется для наблюдения за световым индикатором.
В этом случае предпочтительно полая часть и прозрачное окно представляют собой углубления, которые продолжаются от одного конца и другого конца крепежного элемента в направлении центра крепежного элемента и обращены друг к другу.
Согласно другому варианту выполнения настоящего изобретения на каждой из левой и правой боковых поверхностей крепежного элемента образованы два ребра, продолжающиеся в направлении высоты крепежного элемента, параллельно друг другу, и посредством размещения зажимной части крепежной ленты между упомянутыми двумя ребрами предотвращается относительный поворот зажимной части и держателя датчика вокруг крепежного винта.
В настоящем изобретении предпочтительно, что когда держатель датчика закреплен на наружной периферии корпуса цилиндра с помощью крепежной ленты, верхняя стенка посадочного паза контактирует с верхней поверхностью удерживающего элемента для датчика и нижние концы обеих боковых стенок посадочного паза не контактируют с наружной поверхностью корпуса цилиндра.
В настоящем изобретении предпочтительно один конец паз для крепления датчика открыт и отверстие для вставки образовано на упомянутом одном конце, а другой конец закрыт стенкой.
В настоящем изобретении множество зацепляющих углублений, расположенных в ряд, могут быть образованы вдоль паза для крепления датчика, и зацепляющие выступы, зацепляющиеся с зацепляющими углублениями, могут быть образованы в крепежном элементе, причем зацепляющие выступы могут зацепляться с зацепляющими углублениями, когда крепежный винт затягивается, и зацепляющие выступы могут расцепляться с зацепляющими углублениями, когда крепежный винт ослабляется.
В этом случае предпочтительно зацепляющие углубления образованы на обеих, левой и правой, сторонах паза для крепления датчика, и зацепляющие выступы образованы на каждой из левой и правой стенок посадочного паза в крепежном элементе.
В настоящем изобретении стопоры, которые зацепляются с концами крепежного элемента и предотвращают расцепление удерживающего элемента для датчика и крепежного элемента, могут быть образованы на одном конце и другом конце, в направлении вдоль паза для крепления датчика, удерживающего элемента для датчика.
В настоящем изобретении фиксирующий винт датчика, который закрепляет датчик положения в пазу для крепления датчика, может иметь фланцевую зацепляющую часть на его головке, которая может быть выполнена с возможностью зацепления по выбору с наружной краевой поверхностью отверстия паза для крепления датчика и верхней поверхностью стенки сквозного отверстия крепежного элемента посредством поворота фиксирующего винта датчика по часовой стрелке и против часовой стрелки, и датчик положения может зацепляться и закрепляться на внутренней краевой поверхности отверстия паза для крепления датчика, когда зацепляющая часть зацепляется с наружной краевой поверхностью, и датчик положения может прижиматься и закрепляться на дне паза для крепления датчика, когда зацепляющая часть зацепляется с поверхностью верхней стенки сквозного отверстия.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению посредством ослабления крепежного винта обеспечивается возможность перемещения удерживающего элемента для датчика относительно крепежного элемента для осуществления регулировки позиции датчика положения, при этом крепежный элемент удерживается между парой зажимных частей крепежной ленты. Дополнительно, возможна отдельная регулировка позиции датчика положения относительно удерживающего элемента для датчика. Тем самым обеспечивается высокая степень свободы для регулировки позиции.
Дополнительно, так как отсутствует необходимость соединения крепежной ленты и держателя датчика с помощью удлиненного отверстия или т.п., может быть устранена проблема, заключающаяся в том, что датчик положения легко смещается вдоль удлиненного отверстия под действием вибрации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
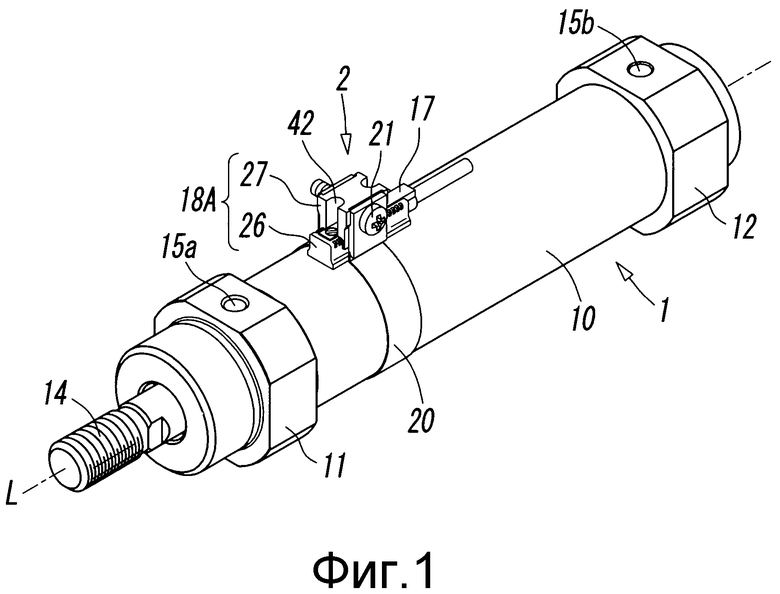
Фиг.1 - вид в перспективе в собранном состоянии, иллюстрирующий первый вариант выполнения устройства определения положения согласно настоящему изобретению.
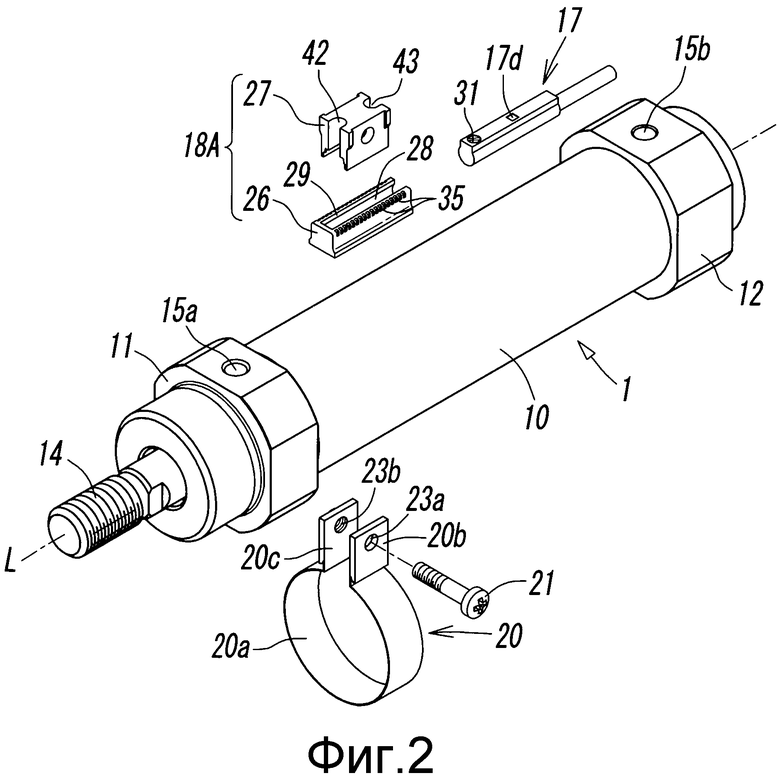
Фиг.2 - вид в перспективе с пространственным разделением деталей, иллюстрирующий вариант выполнения на фиг.1.
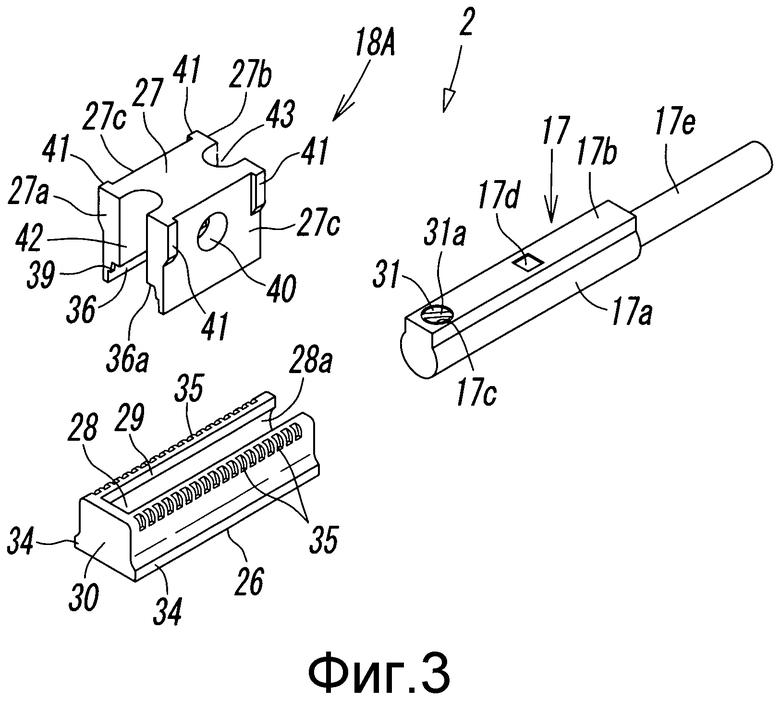
Фиг.3 - местный вид в увеличенном масштабе варианта выполнения на фиг.2.
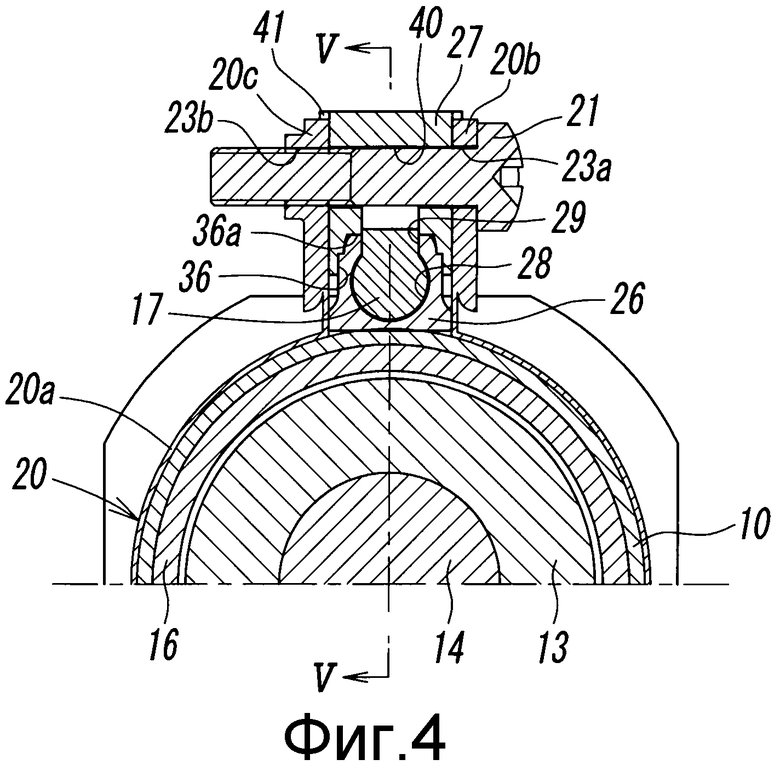
Фиг.4 - местный вид в разрезе в увеличенном масштабе варианта выполнения на фиг.1.
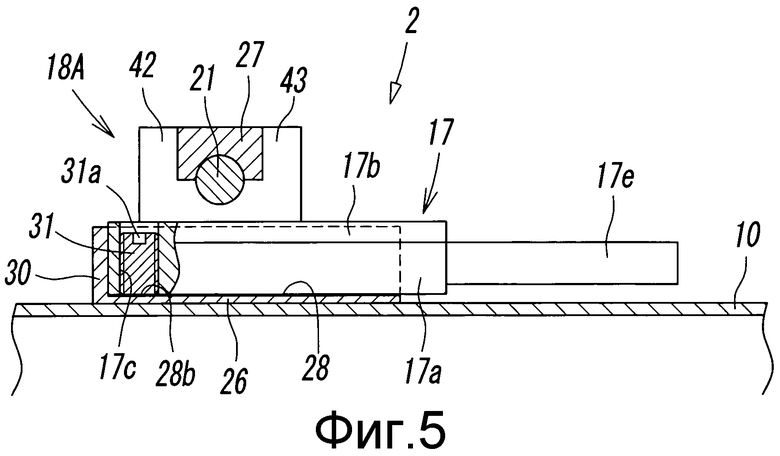
Фиг.5 - вид в разрезе по линии V-V на фиг.4.
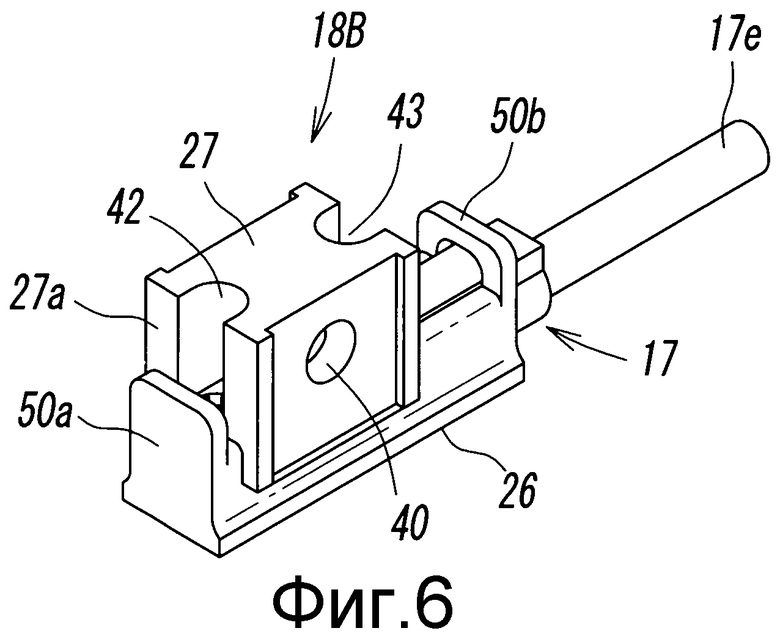
Фиг.6 - вид в перспективе в собранном состоянии, иллюстрирующий второй вариант выполнения устройства определения положения согласно настоящему изобретению.
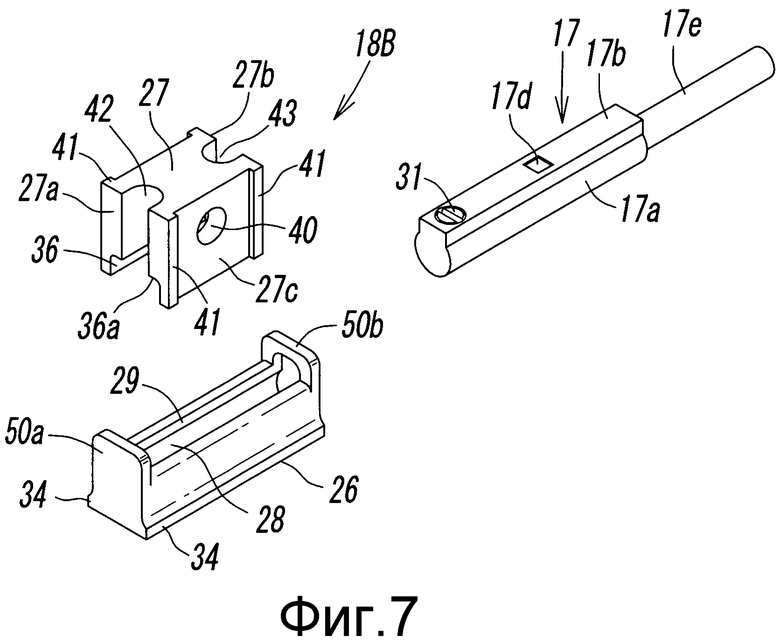
Фиг.7 - вид в пространстве с пространственным разделением деталей, иллюстрирующий держатель датчика на фиг.6.
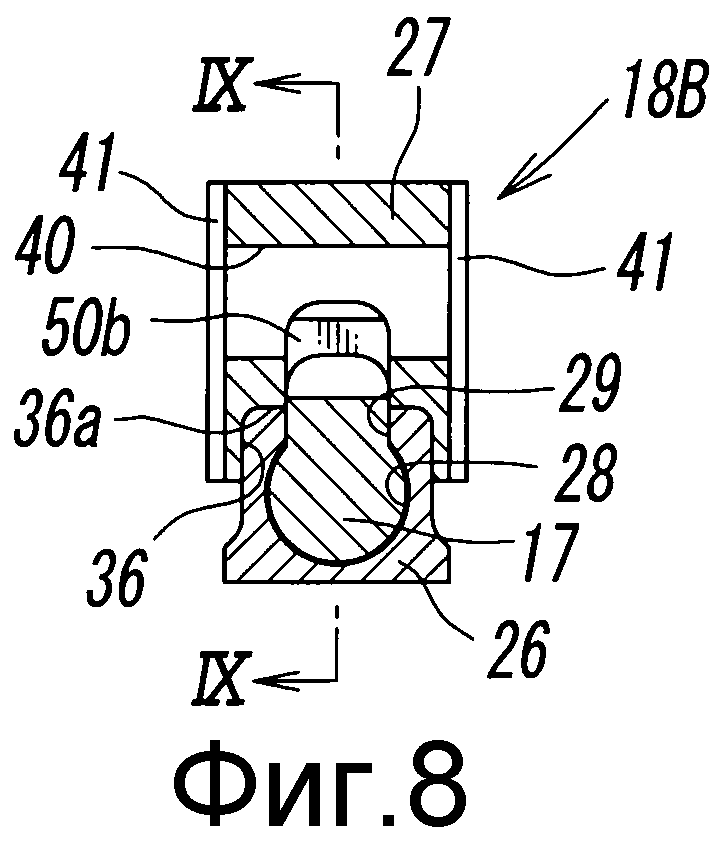
Фиг.8 - вид в поперечном разрезе варианта выполнения на фиг.6.
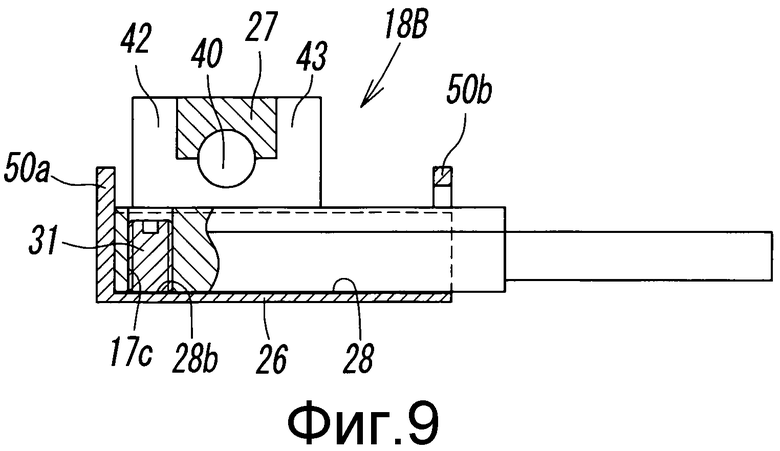
Фиг.9 - вид в разрезе по линии IX-IX на фиг.8.
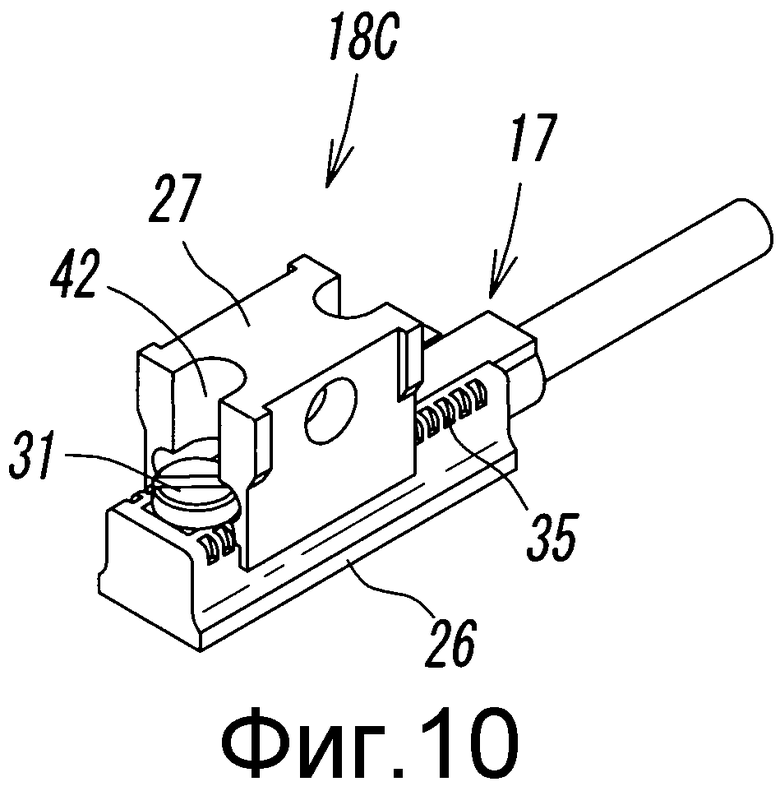
Фиг.10 - вид в перспективе в собранном состоянии, иллюстрирующий третий вариант выполнения устройства определения положения согласно настоящему изобретению.
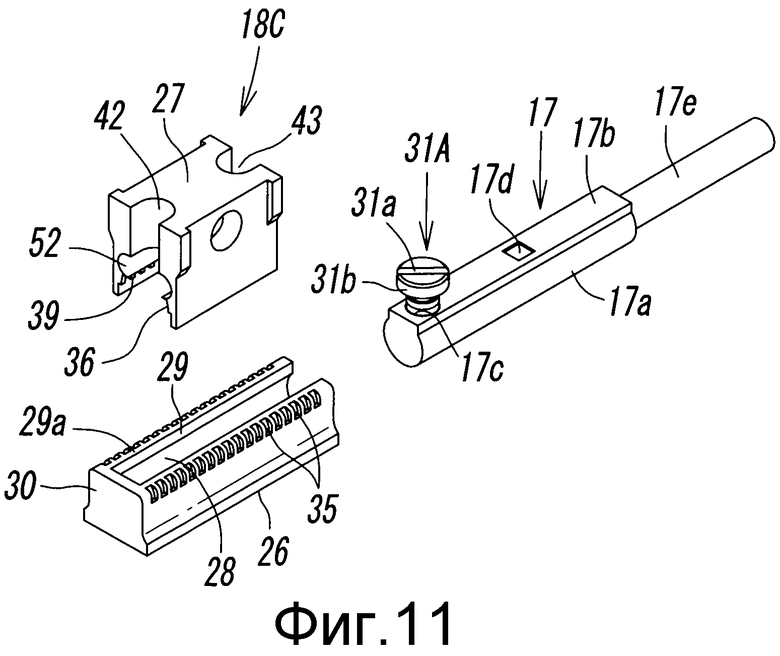
Фиг.11 - вид в перспективе с пространственным разделением деталей, иллюстрирующий держатель датчика на фиг.10.
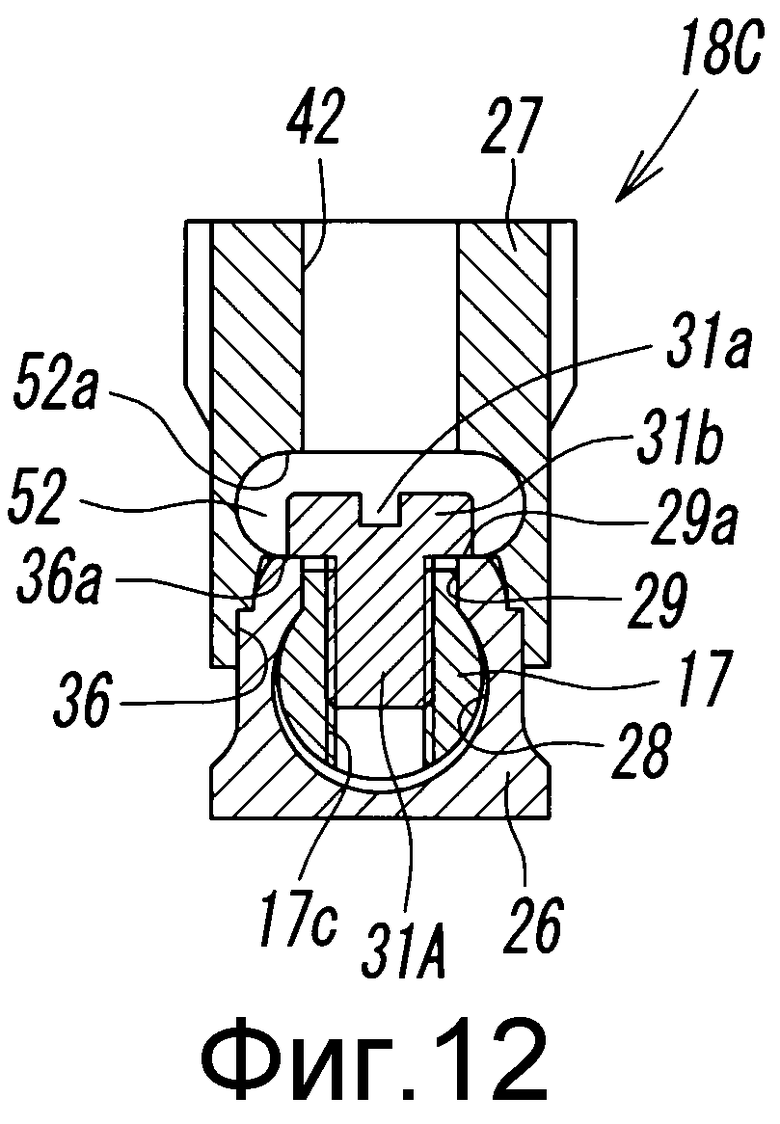
Фиг.12 - вид в разрезе, иллюстрирующий вариант крепления датчика положения с помощью фиксирующего винта датчика.
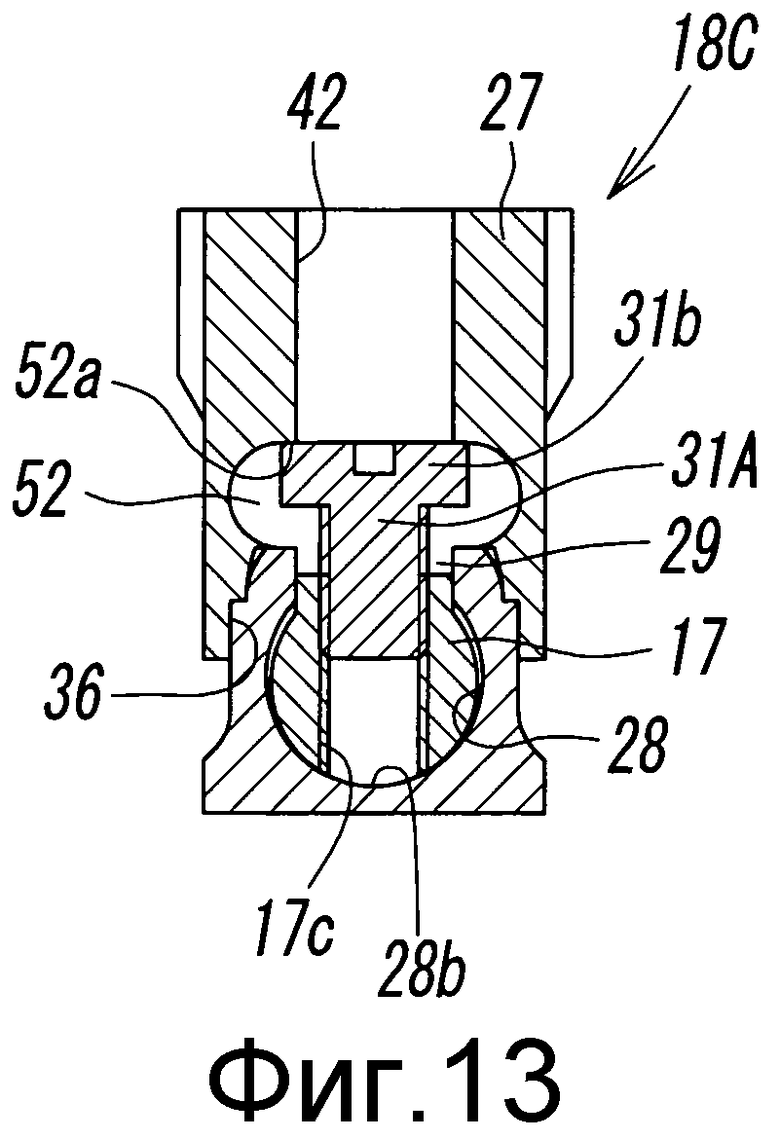
Фиг.13 - вид в разрезе, иллюстрирующий другой вариант крепления датчика положения с помощью фиксирующего винта датчика.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг.1-5 показан первый вариант выполнения устройства определения положения согласно настоящему изобретению. Ссылочной позицией 1 на чертежах обозначен цилиндр давления текучей среды, и ссылочной позицией 2 обозначено устройство определения положения, закрепленное на наружной поверхности гидравлического или пневматического цилиндра 1.
Цилиндр 1 давления текучей среды содержит корпус 10 цилиндра, имеющий отверстие цилиндра и имеющий цилиндрическую форму, и крышку 11 штока и крышку 12 головки, закрепленные на концах корпуса 10 цилиндра. Поршень 13 размещается внутри корпуса 10 цилиндра с возможностью скольжения в направлении центральной оси L корпуса 10 цилиндра (далее называемая «ось корпуса»). Шток 14 поршня, проксимальный конец которого соединен с поршнем 13, проходит с возможностью скольжения через крышку 11 штока и продолжается до позиции перед корпусом 10 цилиндра.
Отверстия 15а и 15b образованы в крышке 11 штока и в крышке 12 головки. Путем поочередной подачи и выпуска текучей среды под давлением (например, сжатый воздух) в и из камер давления с обеих сторон поршня 13 через отверстия 15а и 15b, поршень 13 и шток 14 поршня перемещаются вперед и назад.
Кольцевой постоянный магнит 16 закреплен на наружной периферии поршня 13. Посредством обнаружения магнитного поля постоянного магнита 16 с помощью устройства 2 определения положения, осуществляется обнаружение рабочего положения поршня 13. Если, как показано на чертеже, устройство 2 определения положения закреплено на участке корпуса 10 цилиндра вблизи крышки 11 штока, может осуществляться обнаружение положения конца поршня 13, обращенного в направлении прямого хода. Если устройство 2 определения положения закреплено на участке корпуса 10 цилиндра вблизи крышки 12 головки, может осуществляться обнаружение положения конца поршня 13, обращенного в направлении обратного хода. Если два устройства 2 определения положения закреплены на участках корпуса 10 цилиндра вблизи обоих его концов, может осуществляться обнаружение положений обоих концов поршня 13, обращенных в направлении прямого хода и в направлении обратного хода.
Устройство 2 определения положения включает в себя датчик 17 положения, который обнаруживает магнитное поле постоянного магнита 16, держатель 18А датчика, который удерживает датчик 17 положения, крепежную ленту 20, которая закрепляет держатель 18А датчика на наружной периферии корпуса 10 цилиндра, и крепежный винт 21, который осуществляет закрепление крепежной ленты 20 на корпусе 10 цилиндра и одновременно крепление держателя 18А датчика к крепежной ленте 20.
Крепежная лента 20 образована посредством сгибания в форму дуги полосовой упругой металлической пластины, предпочтительно пластины из немагнитного металла, и имеет основное тело 20а ленты, окружающее наружную периферию корпуса 10 цилиндра, и пару зажимных частей 20b и 20с, образованных на обоих концах основного тела 20а ленты таким образом, что они обращены друг к другу. Если необходимо, ленточные или точечные противодействующие скольжению выступы, изготовленные из каучука, синтетической смолы или т.п., могут быть прикреплены к внутренней поверхности основного тела 20а ленты.
Внутренние поверхности пары зажимных частей 20b и 20с представляют собой плоские зажимные поверхности. Отверстия 23а и 23b для затягивания винта образованы в паре зажимных частей 20b и 20с, соответственно. Первое отверстие 23а для затягивания винта, образованное в одной из зажимных частей 20b, представляет собой обычное отверстие, не имеющее резьбы на его внутренней поверхности, и второе отверстие 23b для затягивания винта, образованное в другой зажимной части 20с, представляет собой резьбовое отверстие, на внутренней поверхности которого имеется внутренняя резьба. Внешняя резьба на дистальном конце крепежного винта 21, вставленного через первое отверстие 23а для затягивания винта, зацепляется с внутренней резьбой на внутренней поверхности второго отверстия 23b для затягивания винта.
По меньшей мере зажимная часть 20с из пары зажимных частей 20b и 20с, в которой образовано второе отверстие 23b для затягивания винта, выполнена таким образом, что она имеет толщину больше основного тела 20а ленты, посредством присоединения или наложения за одно целое усиливающего элемента к концу или на конце крепежной ленты 20, а также может быть образована посредством сгибания конца крепежной ленты 20.
Крепежная лента 20 также может быть образована из твердой и упругой синтетической смолы.
Держатель 18А датчика включает в себя удерживающий элемент 26 для датчика, имеющий паз 28 для крепления датчика, в котором размещается датчик 17 положения, и крепежный элемент 27, зажимаемый между зажимными частями 20b и 20с крепежной ленты 20. Крепежный элемент 27 и удерживающий элемент 26 для датчика выполнены в виде отдельных элементов из немагнитного материала, такого как синтетическая смола.
Удерживающий элемент 26 для датчика представляет собой элемент стержневидной формы, имеющий длину больше, чем крепежный элемент 27, и включает в себя паз 28 для крепления датчика, который продолжается в его продольном направлении, и отверстие 29, которое продолжается вдоль верхней части паза 28 для крепления датчика, причем удерживающий элемент 26 для датчика размещается таким образом, что паз 28 для крепления датчика ориентирован в направлении оси L корпуса 10 цилиндра и нижняя поверхность контактирует с наружной поверхностью корпуса 10 цилиндра.
Паз 28 для крепления датчика имеет по существу дугообразное поперечное сечение, и поэтому ширина отверстия 29 меньше, чем ширина внутренней части паза. Один конец (задний конец) в продольном направлении паза 28 для крепления датчика открыт и образует отверстие 28а для вставки датчика, а другой конец (передний конец) закрыт стенкой 30. Датчик 17 положения вставляется через отверстие 28а для вставки датчика в паз 28 для крепления датчика и закрепляется с помощью фиксирующего винта 31 датчика.
Датчик 17 положения имеет форму длинного стержня и включает в себя часть 17а основного тела, имеющую по существу дугообразное поперечное сечение, и часть 17b в виде платформы, образованную на верху части 17а основного тела и имеющую прямоугольное поперечное сечение. Диаметр (ширина) части 17а основного тела меньше ширины внутренней части паза 28 для крепления датчика, но больше ширины отверстия 29, и тем самым датчик 17 положения может зацепляться с отверстием 29 изнутри паза 28.
Часть 17b в виде платформы вставляется в отверстие 29 паза 28 для крепления датчика и предотвращает поворот.
На переднем конце датчика 17 положения образовано резьбовое отверстие 17с, которое продолжается через датчик 17 положения в вертикальном направлении. Фиксирующий винт 31 датчика ввинчивается в резьбовое отверстие 17с. В середине датчика 17 положения обеспечен световой индикатор 17d, который загорается во время обнаружении положения.
Фиксирующий винт 31 датчика имеет постоянный диаметр. Паз 31а для поворота фиксирующего винта 31 датчика с помощью инструмента, такого как отвертка, образован на верхней поверхности фиксирующего винта 31 датчика.
Посредством завинчивания фиксирующего винта 31 датчика и приведения его дистального конца в контакт с дном 28b паза 28 для крепления датчика, датчик 17 положения поднимается, зацепляется изнутри с краем отверстия 29 паза 28 для крепления датчика и тем самым закрепляется в пазу 28 для крепления датчика.
На чертежах ссылочной позицией 17е обозначен электрический контакт для вывода из датчика сигнала обнаружения положения.
На нижних концах левой и правой боковых поверхностей удерживающего элемента 26 для датчика вдоль всей его длины образованы выступающие края 34, которые выступают в направлении ширины удерживающего элемента 26 для датчика. Верхние концы левой и правой боковых поверхностей, т.е. левый и правый борта удерживающего элемента 26 для датчика, являются скошенными или закругленными. Множество зацепляющих углублений 35, которые располагаются в ряд с заданным шагом, образованы на левом и правом бортах вдоль паза 28 для крепления датчика.
С другой стороны крепежный элемент 27 представляет собой кубовидный элемент, имеющий длину примерно в два раза меньше длины удерживающего элемента 26 для датчика. На нижней поверхности крепежного элемента 27 образован посадочный паз 36 в форме перевернутой буквы «U», который продолжается через крепежный элемент 27 от первого конца 27а до второго конца 27b в направлении оси L цилиндра. Посредством вставки удерживающего элемента 26 для датчика в посадочный паз 36, крепежный элемент 27 размещается на верху удерживающего элемента 26 для датчика таким образом, что он охватывает с двух сторон удерживающий элемент 26 для датчика.
Первый конец 27а крепежного элемента 27 располагается на стороне, с которой располагается задний конец паза 28 для крепления датчика, т.е. стенка 30. Второй конец 27b располагается на стороне, с которой располагается передний конец паза 28 для крепления датчика, т.е. отверстие 28а для вставки датчика.
Посадочный паз 36 имеет форму, обеспечивающую возможность размещения в нем части удерживающего элемента 26 для датчика, расположенной над выступающими краями 34. Когда крепежный элемент 27 размещается на верху удерживающего элемента 26 для датчика, верхняя стенка 36а, являющаяся дном посадочного паза 36, контактирует с верхней поверхностью удерживающего элемента 26 для датчика.
Внутри посадочного паза 36 на левой и правой стенках паза, соответствующих зацепляющим углублениям 35 удерживающего элемента 26 для датчика, образованы множество зацепляющих выступов 39, которые располагаются вдоль посадочного паза 36 в ряд с тем же шагом, что и зацепляющие углубления. Когда крепежный элемент 27 размещается на верху удерживающего элемента 26 для датчика и закрепляется с помощью крепежной ленты 20 и крепежного винта 21, зацепляющие выступы 39 вставляются и зацепляются с зацепляющими углублениями 35.
Ослабление крепежного винта 21 ведет к расцеплению зацепляющих выступов 39 и зацепляющих углублений 35 и позволяет перемещать удерживающий элемент 26 для датчика относительно крепежного элемента 27.
Зацепляющие выступы 39 не обязательно должны быть образованы на левой и правой стенках посадочного паза 36 по всей его длине. Необходимо только обеспечить по меньшей мере пару зацепляющих выступов 39 в середине, на одном конце или на другом конце посадочного паза 36 таким образом, чтобы они были обращены друг к другу.
Левая и правая боковые поверхности 27с крепежного элемента 27 являются контактными поверхностями, с которым контактируют зажимные части 20b и 20с крепежной ленты 20, и выполнены в виде параллельных друг другу плоских поверхностей. В боковых поверхностях 27с образовано отверстие 40 для вставки винта, которое продолжается через крепежный элемент 27 в направлении ширины и обеспечивает непрерывное продолжение отверстий 23а и 23b для затягивания винта зажимных частей 20b и 20с.
Крепежный винт 21 вставляется через первое отверстие 23а для затягивания винта одной зажимной части 20b в отверстие 40 для вставки винта и затем ввинчивается во второе отверстие 23b для затягивания винта другой зажимной части 20с. Посредством затягивания крепежного винта 21 и тем самым перемещения зажимных частей 20b и 20с в направлении друг к другу, крепежный элемент 27 зажимается и закрепляется между двумя зажимными частями 20b и 20с, и удерживающий элемент 26 для датчика прижимается к наружной поверхности корпуса 10 цилиндра и закрепляется крепежным элементом 27. Зацепляющие выступы 39 крепежного элемента 27 зацепляются с зацепляющими углублениями 35 удерживающего элемента 26 для датчика, и тем самым предотвращается перемещение удерживающего элемента 26 для датчика.
При этом нижний конец крепежного элемента 27, т.е. нижние концы обеих боковых стенок посадочного паза 36, не контактирует с наружной поверхностью корпуса 10 цилиндра.
На верхней половине каждой из левой и правой боковых поверхностей 27с крепежного элемента 27 образованы два ребра 41, которые продолжаются параллельно друг другу в направлении высоты крепежного элемента 27. Посредством размещения зажимной части 20b крепежной ленты 20 между двумя ребрами 41 предотвращается относительный поворот зажимной части 20b и держателя 18А датчика вокруг крепежного винта 21, когда крепежный винт 21 затягивается. Ребра 41 могут быть образованы вдоль всей высоты крепежного элемента 27.
В крепежном элементе 27 образованы полая часть 42 и прозрачное окно 43, каждый из которых имеет «U»-образную форму на виде в плане и которые продолжаются от первого конца 27а и второго конца 27b крепежного элемента 27 вдоль паза 28 для крепления датчика. Полая часть 42 и прозрачное окно 43 каждый имеют такую глубину, что они продолжаются от верхней поверхности крепежного элемента 27 до посадочного паза 36, и имеют такую же ширину, что и отверстие 29 паза 28 для крепления датчика. Полая часть 42 используется для осуществления поворота фиксирующего винта 31 датчика с помощью инструмента, такого как отвертка. Прозрачное окно 43 используется для наблюдения за световым индикатором 17d на верхней поверхности датчика 17 положения.
Устройство 2 определения положения имеет описанную выше конструкцию. При осуществлении регулировки позиции датчика 17 положения зацепляющие выступы 39 расцепляются с зацепляющими углублениями 35 посредством ослабления крепежного винта 21 и тем самым ослабления соединения между крепежным элементом 27 и удерживающим элементом 26 для датчика. В этом состоянии удерживающий элемент 26 для датчика перемещается на необходимое расстояние относительно крепежного элемента 27 в направлении оси L цилиндра. После этого посредством повторного затягивания крепежного винта 21 крепежная часть зажимается и закрепляется между зажимными частями 20b и 20с, и удерживающий элемент 26 для датчика прижимается к наружной поверхности корпуса 10 цилиндра крепежным элементом 27. При этом зацепляющие выступы 38 зацепляются с зацепляющими углублениями 35 и удерживающий элемент 26 для датчика тем самым закрепляется в позиции, в которой он располагается после регулировки позиции.
Вместо перемещения удерживающего элемента 26 для датчика возможно отдельно перемещать датчик 17 положения относительно удерживающего элемента 26 для датчика посредством ослабления фиксирующего винта 31 датчика. В этом случае не осуществляется ослабление крепежного винта 21.
В качестве альтернативы, регулировка позиции может также осуществляться посредством перемещения и удерживающего элемента 26 для датчика и датчика 17 положения.
Тем самым обеспечивается высокая степень свободы для регулировки позиции, и даже если имеются ограничения для места крепления крепежной ленты 20, будет возможно осуществлять регулировку позиции датчика 17 положения.
Дополнительно, так как нет необходимости соединять крепежную ленту 20 и держатель 18А датчика с помощью удлиненного отверстия, может быть устранена проблема, заключающаяся в том, что датчик 17 положения легко смещается под действием вибрации.
На фиг.6 и фиг.7 показан второй вариант выполнения держателя датчика в устройстве определения положения согласно настоящему изобретению. Держатель 18В датчика согласно второму варианту выполнения отличается от держателя 18А датчика согласно первому варианту выполнения тем, что в удерживающем элементе 26 для датчика и крепежном элементе 27 отсутствуют зацепляющие углубления 35 и зацепляющие выступы 39, а вместо этого на одном конце и другом конце, в направлении вдоль паза 28 для крепления датчика, удерживающего элемента 26 для датчика образованы стопоры 50а и 50b, которые контактируют и зацепляются с первым концом 27а и вторым концом 27b крепежного элемента 27 и предотвращают расцепление удерживающего элемента 26 для датчика и крепежного элемента 27.
То есть на переднем конце и заднем конце удерживающего элемента 26 для датчика образованы стопоры 50а и 50b, имеющие такую же ширину, что и удерживающий элемент 26 для датчика, и выступающие в направлении вверх. Когда удерживающий элемент 26 для датчика перемещается на максимальное расстояние, стопоры 50а и 50b зацепляются с первым концом 27а и вторым концом 27b крепежного элемента 27 и удерживающий элемент 26 для датчика не может перемещаться дальше.
Остальная конструкция и способ крепления к цилиндру 1 давления текучей среды во втором варианте выполнения по существу такие же, как и в первом варианте выполнения. Поэтому одинаковые ссылочные позиции используются для обозначения таких же компонентов, что и в первом варианте выполнения, и их описание будет опущено.
В качестве модификации держателя 18в датчика согласно второму варианту выполнения стопоры 50а и 50b могут отсутствовать. Эта модификация точно такая же, как если бы в держателе 18А датчика согласно первому варианту выполнения отсутствовали зацепляющие углубления 35 удерживающего элемента 26 для датчика и зацепляющие выступы 39 зажимного элемента 27.
На фиг.10-13 показан третий вариант выполнения держателя датчика в устройстве определения положения согласно настоящему изобретению. Этот держатель 18С датчика отличается от держателя 18А датчика согласно первому варианту выполнения главным образом тем, что в нем используется фиксирующий винт 31А датчика, имеющий фланцевую зацепляющую часть 31b на его головке.
Фиксирующий винт 31А датчика ввинчивается в резьбовое отверстие 17с датчика 17 положения таким образом, что его головка выступает через отверстие 29 паза 28 для крепления датчика удерживающего элемента 26 для датчика наружу относительно паза 28 для крепления датчика. На головке образована зацепляющая часть 31b, которая может зацепляться с плоской наружной краевой поверхностью 29а отверстия 29 паза 28 для крепления датчика снаружи относительно паза 28 для крепления датчика. Поэтому диаметр зацепляющей части 31b больше ширины отверстия 29.
В крепежном элементе 27, над посадочным пазом 36 и вдоль него образовано сквозное отверстие 52, которое имеет ширину больше, чем посадочный паз 36, и продолжается через крепежный элемент 27. Ширина отверстия в направлении слева направо сквозного отверстия 52 больше, чем ширина отверстия 29 паза 28 для крепления датчика и диаметр зацепляющей части 31b фиксирующего винта 31А датчика. Ширина в вертикальном направлении (ширина в направлении сверху вниз) сквозного отверстия 52 больше, чем толщина зацепляющей части 31b фиксирующего винта 31А датчика. Ширина полой части 42 меньше, чем диаметр зацепляющей части 31b фиксирующего винта 31А датчика. Тем самым зацепляющая часть 31b имеет возможность размещаться в сквозном отверстии 52 и зацепляющая часть 31b имеет возможность вступать в контакт с верхней поверхностью 52а стенки сквозного отверстия 52 в месте расположения полой части 42.
Зацепляющая часть 31b предпочтительно имеет круглую форму на виде в плане. На верхней и нижней поверхностях зацепляющей части 31b участок нижней поверхности, который контактирует с наружной краевой поверхностью 29а, и участок верхней поверхности, который контактирует с верхней поверхностью 52а стенки сквозного отверстия 52, предпочтительно представляют собой плоские поверхности. На верхней поверхности зацепляющей части 31b образован паз 31а, с которым зацепляется рабочий конец инструмента, такого как отвертка, для осуществления поворота.
Посредством поворота фиксирующего винта 31А датчика по часовой стрелке или против часовой стрелки, зацепляющая часть 31b по выбору приводится в контакт с наружной краевой поверхностью 29а отверстия 29 паза 28 для крепления датчика и верхней поверхностью 52а стенки сквозного отверстия 52, и датчик 17 положения может таким образом закрепляться в пазу 28 для крепления датчика.
А именно, как показано на фиг.12, когда фиксирующий винт 31А датчика поворачивается по часовой стрелке, зацепляющая часть 31b зацепляется снаружи относительно паза 28 для крепления датчика с наружной краевой поверхностью 29а отверстия 29 и тем самым фиксирующий винт 31А датчика тянет вверх датчик 17 положения, который вступает в контакт и зацепляется изнутри с внутренней краевой поверхностью отверстия 29 паза 28 для крепления датчика, и закрепляется в пазу 28 для крепления датчика. При этом зацепляющая часть 31А зацепляется с плоскими наружными краевыми поверхностями 29а на обеих сторонах отверстия 29 таким образом, что она охватывает его с двух сторон и сохраняет свое положение по горизонтали, и тем самым датчик 17 положения также закрепляется по горизонтали. Этот способ закрепления может использоваться как в том случае, когда фиксирующий винт 31А датчика размещается в сквозном отверстии 52 в месте расположения полой части 42, так и в том случае, когда фиксирующий винт 31А датчика располагается полностью вне сквозного отверстия 52.
Когда фиксирующий винт 31А датчика размещается в сквозном отверстии 52 в месте расположения полой части 42, как показано на фиг.13, при повороте фиксирующего винта 31А датчика против часовой стрелки через полую часть 42 с помощью инструмента, фиксирующий винт 31А датчика поднимается и вступает в контакт с горизонтальной верхней поверхностью 52а стенки сквозного отверстия 52а. Посредством дальнейшего поворота фиксирующего винта 31А датчика в этом состоянии, датчик 17 положения прижимается и закрепляется на дне 28b паза 28 для крепления датчика. Также в этом случае зацепляющая часть 31b вступает в контакт с горизонтальной верхней поверхностью 52а стенки и сохраняет свое положение по горизонтали, и тем самым датчик 17 положения также закрепляется по горизонтали.
Как было описано выше, посредством поворота фиксирующего винта 31А датчика по часовой стрелке или против часовой стрелки и тем самым по выбору приведения зацепляющей части 31b в контакт с наружной краевой поверхностью 29а отверстия 29 паза 28 для крепления датчика и верхней поверхностью 52а стенки сквозного отверстия 52, датчик 17 положения может закрепляться в состоянии, в котором датчик 17 положения не контактирует с дном 28b паза 28 для крепления датчика, или в состоянии, в котором датчик 17 положения прижимается к дну 28b паза. Способ закрепления датчика 17 положения может выбираться в соответствии с условиями установки устройства 2 определения положения.
Конец фиксирующего винта 31А датчика не контактирует с дном 28b паза 28 для крепления датчика как в том случае, когда фиксирующий винт 31А датчика поворачивается по часовой стрелке для закрепления датчика 17 положения, так и в том случае, когда фиксирующий винт 31А датчика поворачивается против часовой стрелки для закрепления датчика 17 положения, и тем самым фиксирующий винт 31А датчика не наносит повреждений дну 28b паза 28 для крепления датчика. Поэтому толщина дна 28b паза может быть уменьшена для улучшения чувствительности датчика 17 положения.
Остальная конструкция и способ крепления к гидравлическому или пневматическому цилиндру 1 в третьем варианте выполнения по существу такие же, как и в первом варианте выполнения. Поэтому одинаковые ссылочные позиции используются для обозначения таких же компонентов, что и в первом варианте выполнения, и их описание будет опущено.
Конструкция фиксирующего винта 31А датчика согласно третьему варианту выполнения также может использоваться в держателе 18В датчика согласно второму варианту выполнения, в котором удерживающий элемент 26 для датчика и крепежный элемент 27 не имеют зацепляющие углубления 35 и зацепляющие выступы 39, и в держателе 18В датчика согласно второму варианту выполнения, в котором отсутствуют стопоры 50а и 50b.
В описанных выше вариантах выполнения, когда держатели 18А, 18В и 18С датчика образованы из синтетической смолы, они могут быть образованы из непрозрачной синтетической смолы или прозрачной синтетической смолы. Если они образованы из непрозрачной синтетической смолы, желательно предусмотреть прозрачное окно 43 для наблюдения за световым индикатором 17d датчика 17 положения в каждом варианте выполнения. Если они образованы из прозрачной синтетической смолы, наличие прозрачного окна 43 не является обязательным.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 цилиндр давления текучей среды
2 устройство определения положения
10 корпус цилиндра
13 поршень
17 датчик положения
17d световой индикатор
18А, 18В, 18С держатель датчика
20 крепежная лента
20а основное тело ленты
20b, 20с зажимная часть
21 крепежный винт
26 удерживающий элемент для датчика
27 крепежный элемент
27а первый конец
27b второй конец
28 паз для крепления датчика
28а отверстие для вставки датчика
28b дно паза
29 отверстие
29а наружная краевая поверхность
31, 31А фиксирующий винт датчика
31b зацепляющая часть
35 зацепляющее углубление
36 посадочный паз
36b верхняя стенка
39 зацепляющий выступ
41 ребро
42 полая часть
43 прозрачное окно
50а, 50b стопор
52 сквозное отверстие
L ось
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУСТОРОННЕЕ ДЕМПФИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2608986C2 |
| Одеяло | 2020 |
|
RU2791529C1 |
| МЕБЕЛЬ | 2008 |
|
RU2505260C2 |
| ПНЕВМАТИЧЕСКИЙ ЗАЖИМНОЙ ПАТРОН, СНАБЖЕННЫЙ БЛОКИРОВОЧНЫМ МЕХАНИЗМОМ | 2018 |
|
RU2751612C2 |
| РУЧНАЯ МАШИНА С ПОСАДОЧНОЙ ШЕЙКОЙ | 2011 |
|
RU2585895C2 |
| РУЧКА ДЛЯ УСТАНОВКИ В ОТВЕРСТИИ | 2005 |
|
RU2395660C2 |
| УЗЕЛ КОЛЬЦЕВОЙ ПИЛЫ | 2017 |
|
RU2742915C2 |
| КОНДИЦИОНЕР ПОТОЛОЧНОГО ТИПА (ВАРИАНТЫ) И ЕГО ВНУТРЕННИЙ БЛОК (ВАРИАНТЫ) | 2008 |
|
RU2387930C1 |
| ПРИСОЕДИНИТЕЛЬНЫЙ ЭЛЕМЕНТ | 1996 |
|
RU2154327C2 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ДИСТРАКЦИОННОГО ОСТЕОГЕНЕЗА | 2019 |
|
RU2766523C1 |
Устройство предназначено для определения положения поршня гидроцилиндра или пневмоцилиндра. Удерживающий элемент для датчика, который удерживает датчик положения, и крепежный элемент, который фиксирует удерживающий элемент на корпусе цилиндра, выполнены в виде отдельных элементов. Удерживающий элемент для датчика расположен таким образом, что паз для крепления датчика ориентирован в направлении оси корпуса цилиндра и соприкасается с наружной поверхностью корпуса цилиндра. Крепежный элемент размещается таким образом, что он охватывает с двух сторон удерживающий элемент для датчика. Путем затягивания крепежного винта и фиксации крепежного элемента с помощью крепежной ленты удерживающий элемент прижимается и фиксируется на наружной поверхности корпуса цилиндра крепежным элементом. Ослабление крепежного винта позволяет удерживающему элементу перемещаться относительно крепежного элемента в направлении оси корпуса цилиндра. Технический результат - повышение надежности крепления. 9 з.п. ф-лы, 13 ил.
1. Устройство определения положения для цилиндра давления текучей среды, содержащее: датчик положения, который обнаруживает положение поршня цилиндра давления текучей среды, держатель датчика, который удерживает датчик положения с возможностью регулировки положения; и крепежную ленту, которая прикрепляет держатель датчика на наружной периферии корпуса цилиндра,
в котором крепежная лента имеет основное тело ленты, окружающее наружную периферию корпуса цилиндра, и пару зажимных частей, образованных на обоих концах основного тела ленты таким образом, что они обращены друг к другу, держатель датчика зажат между парой зажимных частей и держатель датчика зафиксирован между зажимными частями посредством перемещения пары зажимных частей в направлении друг к другу с помощью крепежного винта,
в котором держатель датчика включает в себя удерживающий элемент для датчика, имеющий паз для крепления датчика, в котором помещается датчик положения, и крепежный элемент, зажатый между парой зажимных частей крепежной ленты, причем удерживающий элемент для датчика и крепежный элемент сформированы по отдельности, и
в котором удерживающий элемент для датчика размещен таким образом, что паз для крепления датчика ориентирован в направлении оси корпуса цилиндра, чтобы соприкасаться с наружной поверхностью корпуса цилиндра, при этом крепежный элемент размещен таким образом, чтобы при удерживающем элементе для датчика, помещенном в посадочном пазу на нижней поверхности крепежного элемента, охватывать с двух сторон удерживающий элемент для датчика, при этом крепежный элемент и удерживающий элемент для датчика прикреплены друг к другу посредством затягивания крепежного винта и закрепления крепежного элемента между зажимными частями и ослабление крепежного винта позволяет удерживающему элементу для датчика смещаться относительно крепежного элемента в направлении оси корпуса цилиндра.
2. Устройство определения положения по п.1, в котором датчик положения имеет световой индикатор, который светится во время работы, и фиксирующий винт датчика, который фиксирует датчик положения в пазу для крепления датчика, и крепежный элемент имеет на одном конце и на другом конце, в направлении вдоль паза для крепления датчика, полую часть и прозрачное окно, каждое из которых имеют такую глубину, что они продолжаются от верхней поверхности крепежного элемента до посадочного паза, полая часть используется для осуществления поворота фиксирующего винта датчика с помощью инструмента, а прозрачное окно используется для наблюдения за световым индикатором.
3. Устройство определения положения по п.2, в котором полая часть и прозрачное окно представляют собой углубления, которые имеют такую форму, что они продолжаются от одного конца и от другого конца крепежного элемента к центру крепежного элемента и обращены друг к другу.
4. Устройство определения положения по любому из пп.1-3, в котором на каждой из левой и правой боковых поверхностей крепежного элемента образованы два ребра, которые продолжаются в направлении высоты крепежного элемента параллельно друг другу, и путем размещения зажимной части крепежной ленты между двумя ребрами предотвращается поворот зажимной части и удерживающего элемента для датчика относительно друг друга вокруг крепежного винта.
5. Устройство определения положения по любому из пп.1-3, в котором, когда держатель датчика закреплен на наружной периферии корпуса цилиндра с помощью крепежной ленты, верхняя стенка посадочного паза контактирует с верхней поверхностью удерживающего элемента для датчика и нижние концы обеих боковых стенок посадочного паза не соприкасаются с наружной поверхностью корпуса цилиндра.
6. Устройство определения положения по любому из пп.1-3, в котором один конец паза для крепления датчика открыт и на упомянутом одном конце образовано отверстие для вставки датчика положения, а другой конец закрыт стенкой.
7. Устройство определения положения по любому из пп.1-3, в котором вдоль паза для крепления датчика сформировано множество зацепляющих углублений, расположенных в ряд, в крепежном элементе образованы зацепляющие выступы, которые зацепляются с зацепляющими углублениями, причем зацепляющие выступы зацепляются с зацепляющими углублениями, когда крепежный винт затянут, и расцепляются с зацепляющими углублениями, когда крепежный винт ослаблен.
8. Устройство определения положения по п.7, в котором зацепляющие углубления соответственно сформированы как на левой, так и на правой стороне паза для крепления датчика и зацепляющие выступы сформированы на каждой из левой и правой стенок посадочного паза в крепежном элементе.
9. Устройство определения положения по любому из пп.1-3, в котором на одном конце и другом конце удерживающего элемента для датчика, в направлении вдоль паза для крепления датчика сформированы стопоры, которые зацепляются с концами крепежного элемента и предотвращают расцепление удерживающего элемента для датчика и крепежного элемента.
10. Устройство определения положения по любому из пп.1-3, в котором фиксирующий винт датчика, который фиксирует датчик положения в пазу для крепления датчика, имеет на своей головке фланцевую зацепляющую часть, причем зацепляющая часть может по выбору зацепляться с наружной краевой поверхностью отверстия паза для крепления датчика и верхней поверхностью стенки сквозного отверстия крепежного элемента путем поворота фиксирующего винта датчика по часовой стрелке и против часовой стрелки, причем датчик положения зацепляется и фиксируется на внутренней краевой поверхности отверстия паза для крепления датчика, когда зацепляющая часть зацепляется с наружной краевой поверхностью, и датчик положения прижимается и фиксируется на дне паза для крепления датчика, когда зацепляющая часть зацепляется с верхней поверхностью стенки сквозного отверстия.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| ГИДРАВЛИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 1990 |
|
RU2011035C1 |
| ГИДРОЦИЛИНДР С ИНДИКАЦИЕЙ ПОЛОЖЕНИЯ | 1989 |
|
SU1826637A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА СОЕДИНЕНИЕМ ТРАНСПОРТЕРНОЙ ЛЕНТЫ | 1999 |
|
RU2185597C2 |

