Настоящее изобретение относится к устройству производимого без демонтажа неразрушающего контроля конструктивных элементов двигателя, в частности, турбомашины.
Неразрушающий контроль конструктивных элементов двигателя турбомашины позволяет проверять состояние этих конструктивных элементов без нанесения им повреждений. В некоторых случаях при контроле может потребоваться снятие двигателя и его частичная разборка для осмотра конструктивных элементов, труднодоступных для средств контроля.
Известное устройство контроля содержит жесткую трубку, удерживающую на своем дистальном конце инструмент контроля или датчик. В том случае, когда турбомашина снабжена эндоскопическими отверстиями, эта трубка вводится в турбомашину через эти отверстия для контроля без демонтажа конструктивных элементов турбомашины, что позволяет избежать снятия или разборки двигателя.
Однако, доступная для этой трубки зона существенно ограничена и расположена в целом перпендикулярно эндоскопическому отверстию и на небольшом расстоянии от этого отверстия. Кроме того, когда инструмент, удерживаемый трубкой, должен быть использован на конструктивном элементе, этот инструмент должен быть прижат с некоторым усилием и в течение определенного периода времени к поверхности конструктивного элемента, что не всегда представляется возможным в случае вышеупомянутого устройства.
Например, в случае лабиринтовых герметичных соединений турбомашины внешние кольцеобразные пластины, удерживаемые ротором турбомашины, взаимодействуют с блоками, выполненными из измельченного материала, удерживаемыми внутренними кольцевыми рабочими площадками лопаток статора турбомашины. Для доступа к пластинам лабиринтового соединения необходимо, таким образом, пропустить инструмент контроля в очень узкое пространство, которое может иметь ширину или осевой размер приблизительно в 1 мм, что не представляется возможным в случае вышеупомянутой трубки.
Как следствие, некоторые зоны турбомашины остаются труднодоступными для известных специалистам устройств неразрушающего контроля, поскольку они не рассчитаны для прохождения через отверстия или проходы небольшого размера и через множество отверстий и (или) проходов, расположенных друг за другом не на одной линии.
Кроме того, во время контроля конструктивного элемента инструмент в целом должен удерживаться неподвижно против двигателя, что представляется сложным в случае вышеупомянутой трубки, известной из уровня техники.
В изобретении предлагается простое, эффективное и экономичное решение проблем известного уровня техники.
Задачей настоящего изобретения является, в частности, разработка устройства неразрушающего контроля, позволяющего осуществлять контроль конструктивных элементов независимо от их положения в турбомашине и доступности и твердо удерживать инструмент или датчик контроля на этапе контроля.
В связи с этим предлагается устройство неразрушающего контроля без снятия конструктивных элементов двигателя, в частности, турбомашины, содержащее продольную трубку, на дистальном конце которой установлен инструмент контроля, отличающееся тем, что оно содержит продольный палец, установленный с возможностью вращения на дистальном конце трубки; причем этот палец удерживает на первом конце средства удержания инструмента контроля, а на втором конце средства зацепления на конструктивном элементе двигателя; причем эти средства зацепления перемещаются в направлении, параллельном пальцу.
Перемещение средств зацепления устройства, согласно изобретению, в направлении, параллельном пальцу, позволяет их удалять или приближать к средствам поддержки инструмента контроля в зависимости от специфического окружения конструктивных элементов контроля двигателя. Эти средства зацепления предназначены для опирания на конструктивный элемент двигателя для стабилизации устройства во время контроля конструктивных элементов. Конструктивный элемент двигателя может быть заключен, например, между средствами поддержки и средствами зацепления устройства, согласно изобретению, для фиксации в неподвижном положении устройства в процессе контроля. Средства удержания инструмента разработаны для введения в очень узкие пространства для размещения инструмента контроля в труднодоступных местах двигателя.
Согласно другому отличительному признаку изобретения, эти средства поддержки содержат тонкую пластину вытянутой формы, которая установлена вращающейся одним из своих концов на первом конце пальца между положением, обращенным книзу, в котором она по существу вытянута параллельно пальцу, и развернутым положением, в котором она по существу вытянута перпендикулярно пальцу.
Пластинка поддержки инструмента контроля имеет в состоянии покоя, предпочтительно, вытянутую форму и немного изогнутую вокруг своей оси растяжения. Пластинка, согласно изобретению, предпочтительно, является гибкой, деформируемой при сгибании, что позволяет, в частности, применять инструмент с приложением некоторого усилия (соответствующим сгибанию пластинки) к поверхности конструктивного элемента контроля, когда этот инструмент должен опираться на конструктивный элемент во время контроля. Эта пластинка, кроме того, перемещается путем вращения между положением, обращенным книзу, в котором она вытянута вдоль и сбоку пальца, и развернутым положением, в котором она вытянута по существу перпендикулярно пальцу. Пластинка приведена в положение, обращенное книзу, которое является предварительным к введению трубки в турбомашину для защиты инструмента от возможного удара об окружающие конструктивные элементы. Вращение пластинки может управляться посредством провода, например, типа «рояльной проволоки», вытянутого вдоль трубки и соединенного своим дистальным концом с пластинкой. Устройство может содержать эластичные возвратные средства, приводящие пластинку в положение, обращенное книзу, или в развернутое положение.
Инструмент контроля может быть закреплен, например, путем приклеивания к свободному концу пластинки. В качестве инструмента контроля может быть использован датчик, работающий на принципе токов Фуко, или ультразвуковой датчик, или миникамера.
Палец, предпочтительно, устанавливается вращающимся своей срединной частью на дистальном конце трубки, между свернутым положением, в котором он вытянут по существу параллельно трубке, и развернутым положением, в котором он вытянут по существу перпендикулярно трубке. Это позволяет дополнительно увеличить зоны, доступные устройству, согласно изобретению. Вращение пальца может управляться посредством провода, например, типа «рояльной проволоки», вытянутого вдоль трубки и соединенного своим дистальным концом с пальцем или пластинкой.
Вышеупомянутые провода могут быть уложены внутри трубки и соединены с соответствующими средствами управления, расположенными на проксимальном конце трубки.
Устройство также может содержать эластичные возвратные средства, приводящие палец в свернутое положение или в развернутое положение.
Средства зацепления устройства, согласно изобретению, могут содержать рычаг, установленный скользящим в соответствующем осевом пазу второго конца пальца и удерживающем на своем свободном конце опорную лапу, вытянутую по существу перпендикулярно рычагу.
Перемещение средств зацепления может управляться посредством, по меньшей мере, одного провода, вытянутого вдоль трубки и соединенного своим дистальным концом с концом рычага, противоположного опорной лапе.
В дальнейшем изобретение поясняется описанием вариантов его осуществления, не носящим ограничительного характера, со ссылкой на прилагаемые чертежи, на которых:
- Фиг.1 представляет собой схематичный, частичный вид устройства контроля, согласно изобретению, изображенного в положении, обращенном книзу, или свернутом положении;
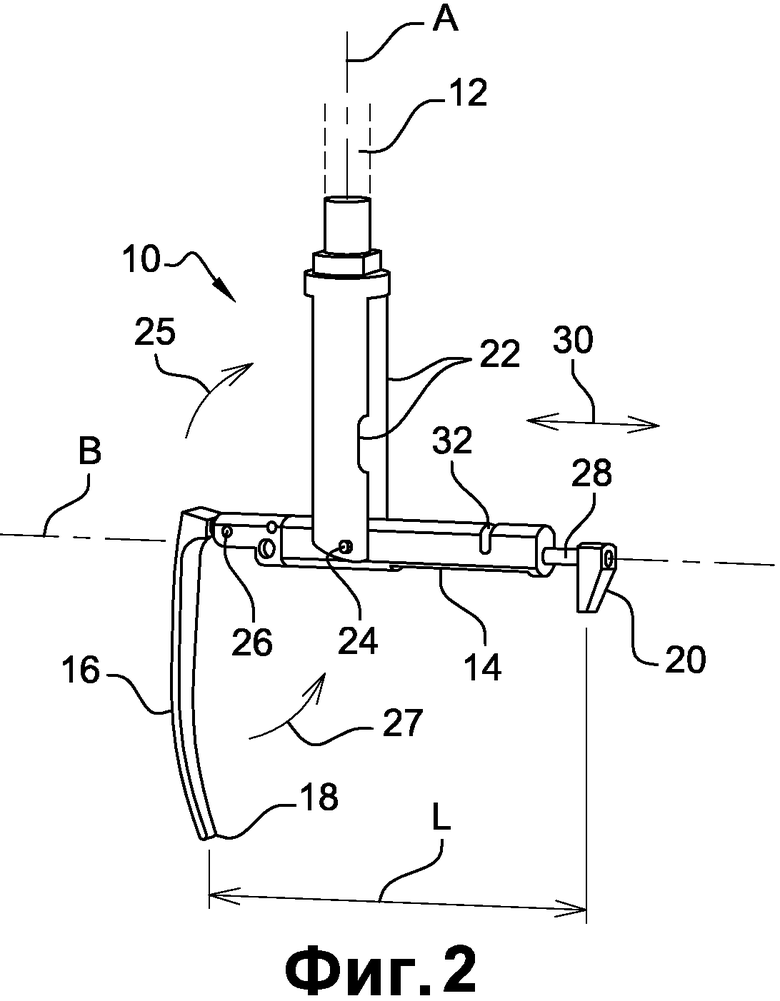
- Фиг.2 - схематичный, частичный вид в изометрии устройства, изображенного на фиг.1, показанного в его развернутом положении;
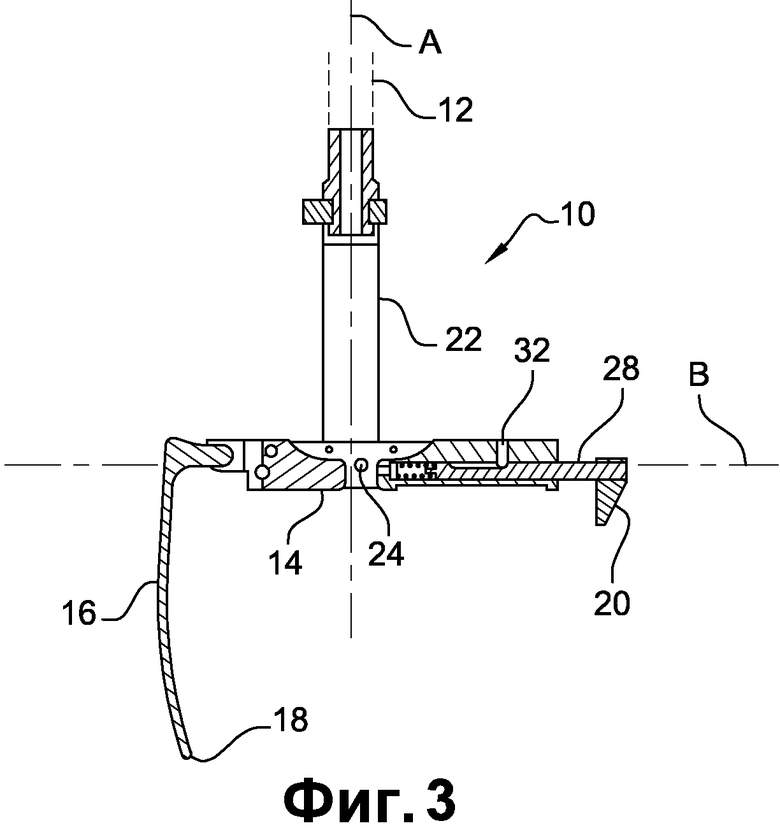
- Фиг.3 - схематичный вид, выполненный в осевом разрезе, устройства, изображенного на фиг.1, в его развернутом положении;
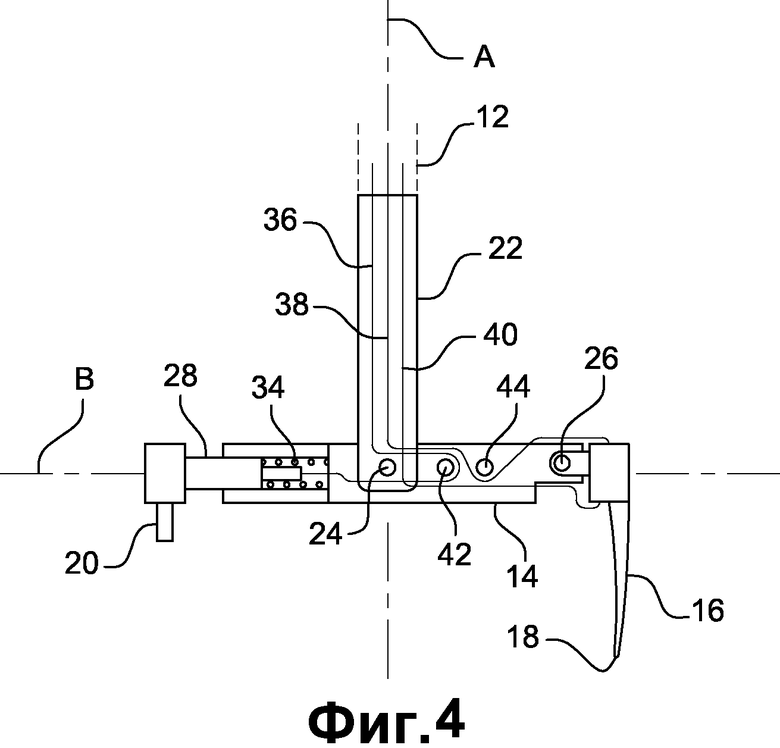
- Фиг.4 - другой схематичный вид, выполненный в осевом разрезе, устройства, показанного на фиг.1, и изображает средства управления этим устройством;
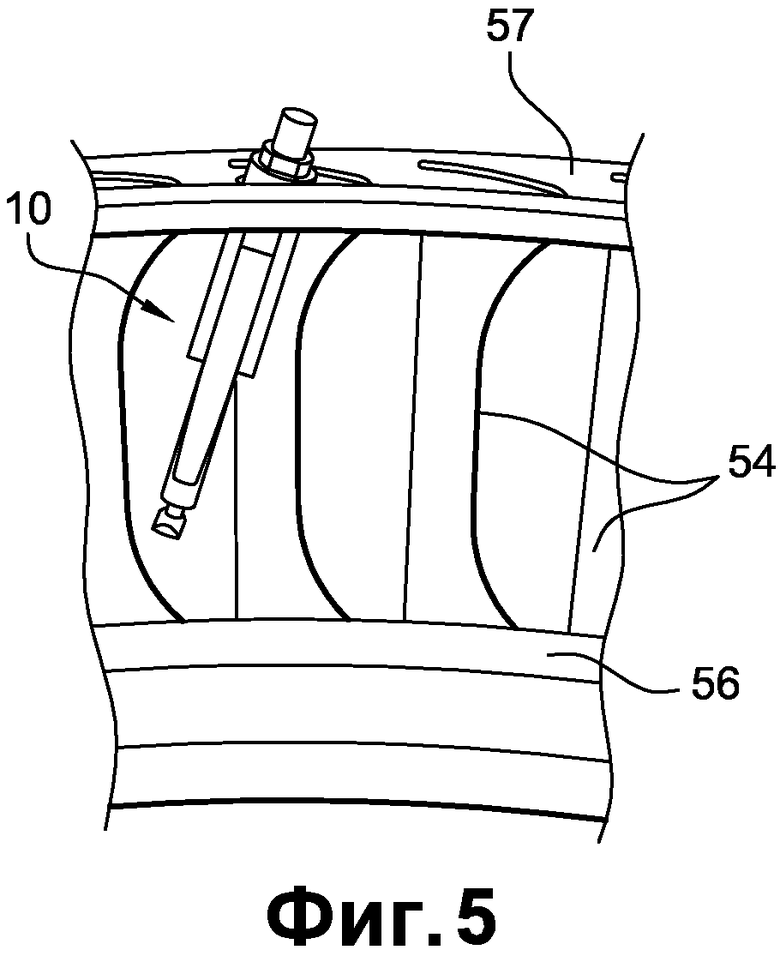
- Фиг.5-8 представляют собой схематичные виды в изометрии части двигателя турбомашины, в который введено устройство, показанное на фиг.1-4, для контроля на месте конструктивных элементов, и изображают различные этапы расположения этого устройства в двигателе.
Вначале следует обратиться к фиг.1-4, на которых изображено устройство 10 неразрушающего контроля образца, согласно изобретению, конструктивных элементов двигателя турбомашины; причем частичное описание этого двигателя приведено ниже со ссылкой на фиг.5-8.
Устройство 10 содержит продольную трубку 12 (показана пунктирными линиями), на дистальном конце которой установлен вращающимся палец 14, удерживающий на одном из своих концов опорную пластинку 16 инструмента контроля 18, а на своем противоположном конце - опорную лапку 20 и (или) лапку зацепления на конструктивном элементе двигателя.
Трубка 12 удерживает на своем дистальном конце две продольные лапки 22, расположенные параллельно и на расстоянии друг от друга; причем палец 14 установлен вращающимся в своей срединной части на оси 24, вытянутой между свободными концами лапок 22.
Палец 14 подвижен во вращении (стрелка 25) между положением, обращенным книзу, изображенным на фиг.1, в котором он вытянут между лапками и параллельно продольной оси A трубки, и развернутым положением, изображенным на фиг.2-4, в котором он вытянут перпендикулярно этой оси A.
Пластинка 16 имеет вытянутую форму и установлена вращающейся (стрелка 27) одним из своих концов вокруг оси 26, удерживаемой одним из концов пальца 14, между свернутым положением, изображенным на фиг.1, в котором она вытянута вдоль пальца, и развернутым положением, изображенным на фиг.2-4, в котором она вытянута перпендикулярно оси B пальца. Пластинка, предпочтительно, закреплена съемным образом на пальце, предоставляющим возможность быть замененной другой, например, в случае износа пластинки или инструмента или для замены типа инструмента.
Пластинка 16 является относительно тонкой и гибко деформируемой при сгибании. Инструмент контроля 18, который является, например, инструментом, работающим на принципе токов Фуко или ультразвука, закреплен путем приклеивания на свободном конце пластинки. Как вариант или как дополнение, на свободном конце пластинки может быть закреплена миниатюрная камера.
Лапка 20 закреплена на конце рычага 28, который установлен скользящим в соответствующем осевом пазу пальца, выходящим на свой конец, который противоположен пластинке 16. Лапка 20 вытянута по существу параллельно и в том же направлении, что и пластинка 16, когда последняя находится в развернутом положении (фиг.2-4).
Лапка 20 перемещается путем поступательного движения в направлении, параллельном оси B пальца 14, посредством скольжения рычага 28 в пазу пальца. Перемещение лапки (стрелка 30) приводит к изменению расстояния L между этой лапкой и опорной пластинкой 16 инструмента (фиг.2).
Эластичные возвращающие средства 34, такие как винтовая пружина, установлены вокруг рычага 28 и приводят лапку 20 в ее положение, наиболее удаленное от пластинки 16 (фиг.4).
Палец 14 удерживает средства упора 32, взаимодействующие с рычагом 28, для ограничения хода перемещения лапки 20 против пальца.
На фиг.4 схематично изображены средства управления перемещением лапки 20 и вращением пальца 14 и пластинки 16. Эти средства управления содержат провода 36, 38 и 40, например, типа «рояльной струны», которые вытянуты вдоль трубки 12 и соединены своими проксимальными концами с соответствующими средствами управления, расположенными на проксимальном конце трубки. Эти провода выполнены, например, из стали и имеют диаметр порядка 0,5 мм.
Дистальный конец провода 36 соединен с концом рычага 28, противоположным лапке 20, для управления перемещением путем поступательного движения лапки вдоль оси B пальца. При приложении к проводу 36 усилия растяжения лапка приближается к опорной пластинке 16 инструмента.
Дистальный конец провода 38 соединен с концом пластинки 16, противоположной инструменту 18, таким образом, что усилие растяжения, приложенное к проводу, приводит к повороту одновременно тонкой пластины и пальца от их свернутых положений, до их соответствующих развернутых положений.
Дистальный конец провода 40 соединен с концом тонкой пластины, противоположной инструменту, таким образом, что усилие растяжения, приложенное к проводу, приводит к повороту одновременно пластинки и пальца от их развернутых положений до их соответствующих свернутых положений.
Палец 14 удерживает средства 42, 44 направления вышеупомянутых проводов таким образом, чтобы направлять усилия, прилагаемые к конструктивным элементам, которые перемещаются посредством проводов, в заданных направлениях. В изображенном примере первые средства 42 направления провода 36 управления перемещением лапки 20 преобразуют усилие растяжения, параллельное оси трубки 12, в усилие растяжения, параллельное оси В пальца. Вторые средства 44 направления провода 38 управления вращением пальца и пластинки преобразуют усилие растяжения, параллельное оси A трубки, в усилие растяжения, по существу параллельное оси B пальца.
Устройство 10, согласно изобретению, может, кроме того, содержать эластичные возвратные средства, воздействующие на палец и (или) пластинку в их, соответственно, свернутых или в развернутых положениях.
На фиг.5-8, изображены этапы способа производимого без демонтажа контроля конструктивных элементов двигателя турбомашины при помощи устройства, описание которого приведено выше.
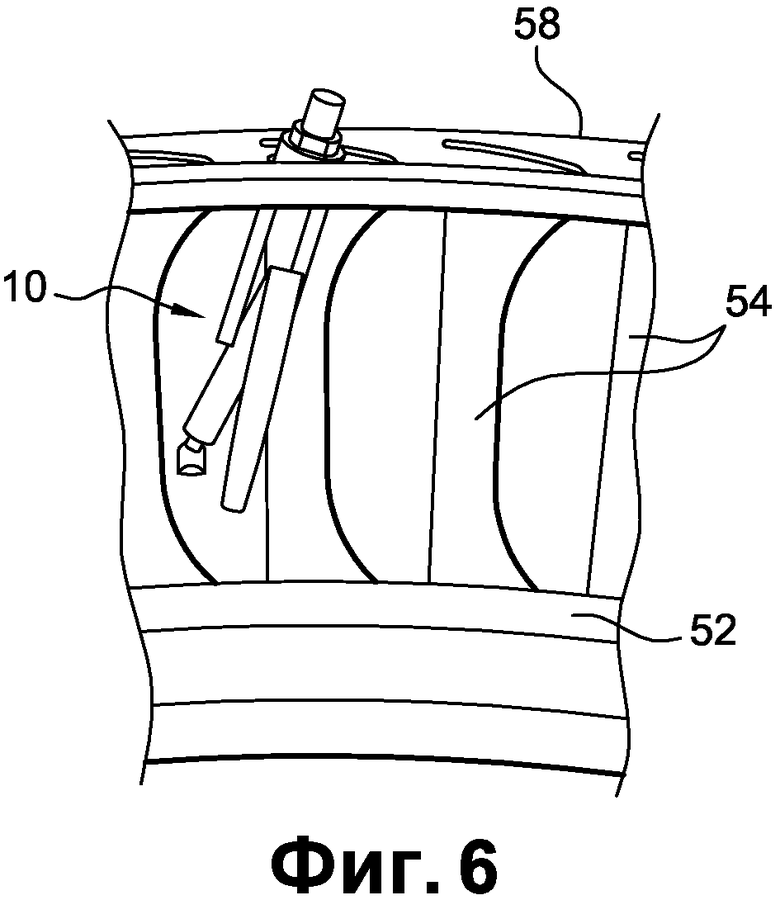
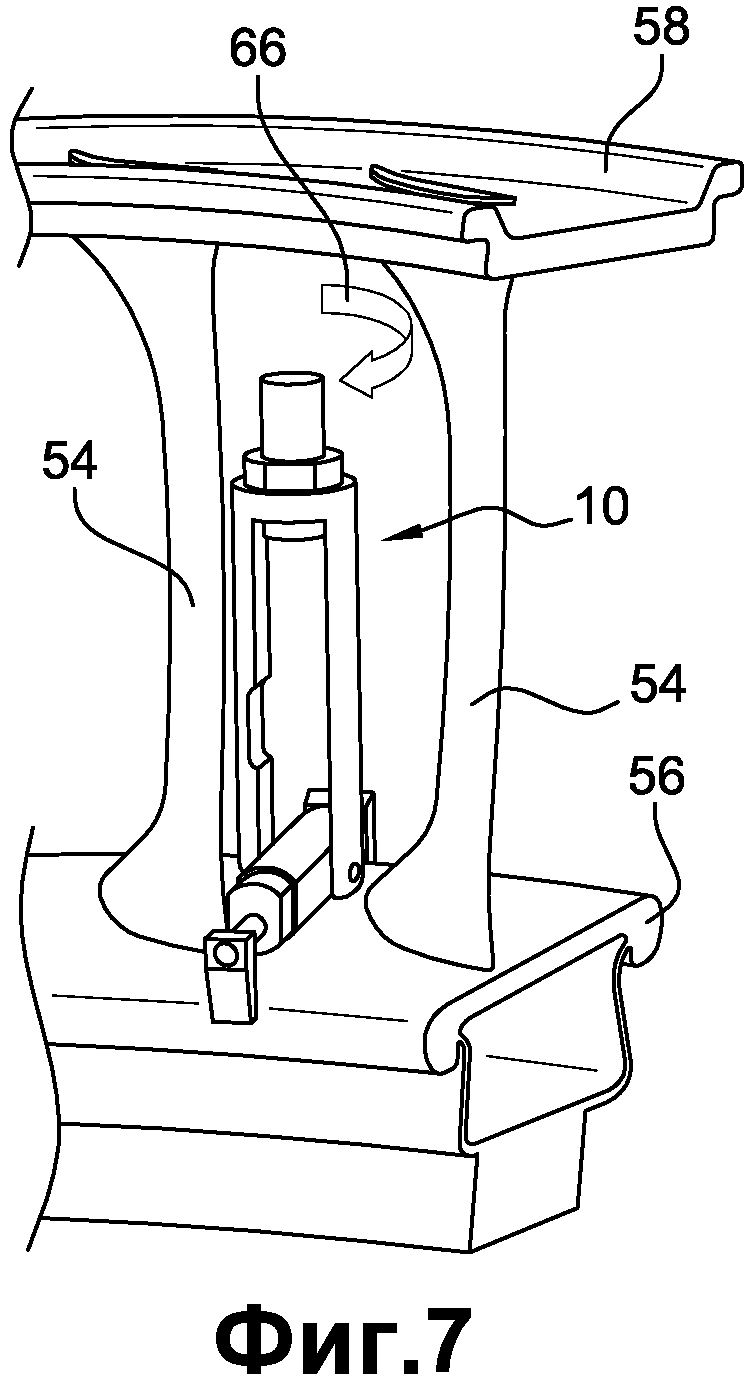
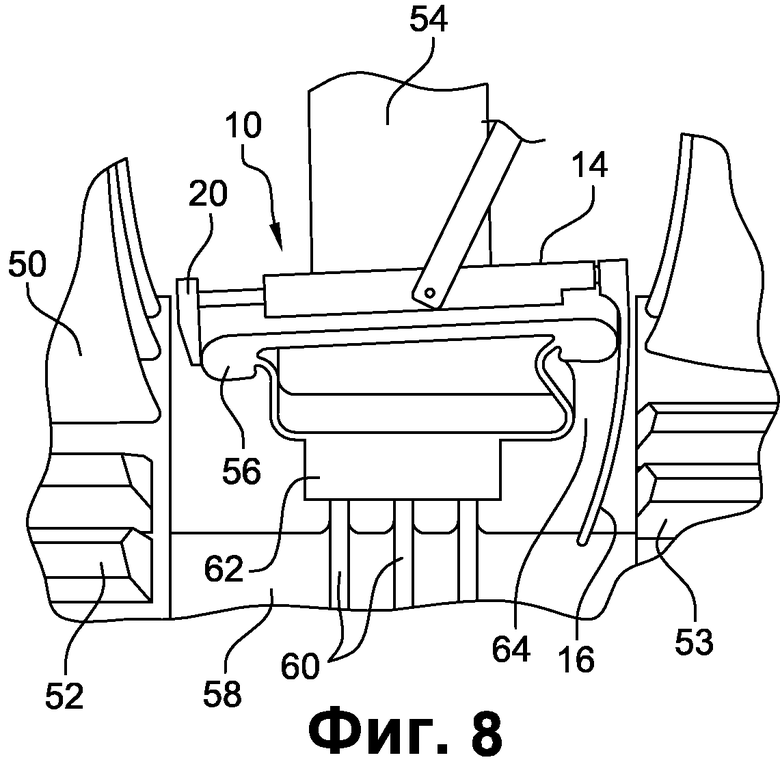
Фиг.8 представляет собой схематичный частичный вид в изометрии ступени турбины или компрессора турбомашины. Эта ступень содержит ряд расположенных по кругу лопаток ротора 50, удерживаемых диском 52, и один ряд расположенных по кругу лопаток статора 54, размещенных перед лопатками ротора 50 и радиально вытянутых между внутренней кольцевой рабочей площадкой 56 и внешней кольцевой рабочей площадкой 57 (фиг.5-8). Внутренняя рабочая площадка 56 расположена вокруг стенки ротора 58, по существу цилиндрически, соединяя диск ротора 52 с другим диском ротора 53, расположенным перед лопатками статора 54.
Уплотнительное соединение лабиринтового типа установлено между стенкой ротора 58 и внутренней рабочей площадкой 56 и содержит кольцеобразные кусочки 60, радиально вытянутые наружу от стенки ротора 58 и взаимодействующие с блоками, выполненными из измельченного материала 62, закрепленными на внутренней периферии рабочей площадки 56.
Внешняя рабочая площадка 57 содержит по существу радиальные отверстия для прохождения устройства 10, как это было описано ранее, для контроля труднодоступных конструктивных элементов, таких как стенка ротора 58 и кольцеобразные кусочки 60.
Контроль стенки ротора 58 и кусочков 60 посредством устройства 10, согласно изобретению, осуществляется следующим образом. Палец 14 и пластинка 16 приведены в их свернутые положения, изображенные на фиг.1, в которых палец 14 выровнен по оси A трубки 12, а пластинка 16 вытянута вдоль пальца. Устройство 10 вставлено снаружи в одно из отверстий внешней рабочей площадки 57 до того места, в котором палец 14 будет расположен между двумя рабочими площадками 56 и 57 (фиг.5), т.е. в трубке тока газов компрессора или турбины. Усилие растяжения прилагается к проводу 38 таким образом, чтобы палец 14 поворачивался вокруг оси 24, а пластинка 16 поворачивалась вокруг оси 26 (фиг.6), начиная от их свернутых положений, до их соответствующих развернутых положений, изображенных на фиг.2-4. Эти вращения вокруг оси могут быть облегчены за счет вышеупомянутых эластичных возвращающих средств устройства. Опорная лапка 20, кроме того, приводится в свое положение, наиболее удаленное от пластинки 16, посредством вышеупомянутых эластичных средств 34. Затем трубка 12 поворачивается вокруг своей оси A таким образом, чтобы свободный конец пластинки 16 был расположен на уровне кольцевого пространства 64, вытянутого в осевом направлении между задним кольцеобразным бортом внутренней рабочей площадки 56 лопаток статора 54 и передним кольцеобразным бортом диска 53. Устройство перемещается в поступательном движении вдоль оси A трубки к внутренней рабочей площадке 56 до тех пор, пока палец 14 не будет расположен рядом с этой рабочей площадкой, а пластинка 16 не будет введена в вышеупомянутое пространство 64. Палец 14 может быть вновь перемещен путем вращения вокруг оси A трубки 12 (стрелка 66 на фиг.7) таким образом, что лапка 20 и пластинка 16 упрутся в передний и задний кольцеобразные борта, соответственно, внутренней рабочей площадки 56. Затем усилие растяжения прилагается к проводу 36 таким образом, что лапка перемещается к тонкой пластине и будет прочно удерживаться против переднего кольцеобразного борта рабочей площадки 56. Эта рабочая площадка 56, таким образом, заключена между лапкой 20 и пластинкой 16, а устройство неподвижно фиксируется на рабочей площадке для контроля кусочков 60 (фиг.8). В этом положении инструмент контроля 18 опирается на внешнюю поверхность стенки ротора 58, удерживая кольцеобразные кусочки 60 (фиг.8). Это вызывает легкую деформацию эластичной при сгибании тонкой пластины, возвратно-эластичная сила которой обеспечивает удержание инструмента против стенки 58. Таким образом, может быть начат контроль стенки 58 посредством инструмента 18. Стенка ротора 58 перемещается путем вращения вокруг своей оси таким образом, чтобы контролировать полную кольцевую зону (вытянута на 360°) этой стенки посредством инструмента.
Настоящее изобретение относится к устройству производимого без демонтажа неразрушающего контроля конструктивных элементов двигателя, в частности турбомашины. Устройство (10) производимого без демонтажа неразрушающего контроля конструктивных элементов двигателя турбомашины, содержащее трубку (12), на дистальном конце которой установлен палец (14), который удерживает на одном из своих концов пластинку (16) поддержки инструмента контроля (18), а на своем противоположном конце лапку (20) поддержки и (или) зацепления на конструктивном элементе двигателя; причем эта лапка перемещается в направлении (30), параллельном продольной оси пальца. Технический результат - разработка устройства неразрушающего контроля, позволяющего осуществлять контроль конструктивных элементов независимо от их положения в турбомашине и доступности и твердо удерживать инструмент или датчик контроля на этапе контроля. 11 з.п. ф-лы, 8 ил.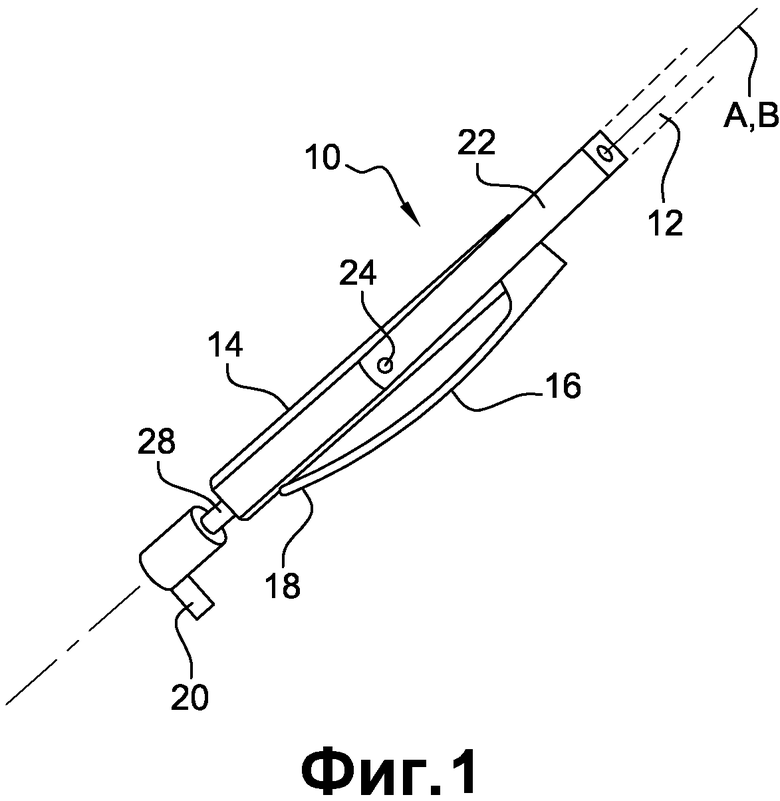
1. Устройство (10) производимого без демонтажа неразрушающего контроля конструктивных элементов двигателя, в частности турбомашины, содержащее продольную трубку (12), на дистальном конце которой установлен инструмент контроля (18), отличающееся тем, что оно содержит продольный палец (14), установленный вращающимся на дистальном конце трубки; причем этот палец удерживает на первом конце средства (16) поддержки инструмента контроля, а на втором конце средства (20) зацепления на конструктивном элементе двигателя; причем эти средства зацепления перемещаются в направлении (30), параллельном пальцу.
2. Устройство по п.1, отличающееся тем, что средства поддержки содержат пластинку (16) вытянутой формы, которая установлена вращающейся одним из своих концов на первом конце пальца (14) между свернутым положением, в котором она вытянута по существу параллельно пальцу, и развернутым положением, в котором она вытянута по существу перпендикулярно пальцу.
3. Устройство по п.2, отличающееся тем, что пластинка (16) является эластично деформируемой при сгибании.
4. Устройство по п.2, отличающееся тем, что инструмент (18) контроля закреплен, например, путем приклеивания на свободном конце пластинки (16).
5. Устройство по п. 2, отличающееся тем, что оно содержит эластичные возвратные средства, приводящие пластинку (16) в свернутое положение или в развернутое положение.
6. Устройство по п. 2, отличающееся тем, что оно содержит, по меньшей мере, один провод управления поворотом пластинки (16) от ее развернутого положения до ее свернутого положения и (или) от ее свернутого положения до ее развернутого положения; причем один кабель или кабели управления вытянуты вдоль трубки (12).
7. Устройство по п. 1, отличающееся тем, что палец (14) установлен вращающимся своей срединной частью на дистальном конце трубки (12) между свернутым положением, в котором он вытянут по существу параллельно трубке, и развернутым положением, в котором он вытянут по существу перпендикулярно трубке.
8. Устройство по п. 7, отличающееся тем, что оно содержит эластичные возвратные средства, приводящие палец (14) в его положение, обращенное книзу, или в развернутое положение.
9. Устройство по п. 7, отличающееся тем, что оно содержит, по меньшей мере, один провод управления поворотом пальца (14) от его развернутого положения до его свернутого положения и (или) от его свернутого положения до его развернутого положения; причем один кабель или кабели управления вытянуты вдоль трубки (12).
10. Устройство по п. 1, отличающееся тем, что средства зацепления устройства содержат рычаг (28), установленный скользящим в соответствующем осевом пазу второго конца пальца (14) и удерживающим на своем свободном конце опорную лапу (20), вытянутую по существу перпендикулярно рычагу.
11. Устройство по п. 10, отличающееся тем, что перемещение средств зацепления (20) управляется посредством, по меньшей мере, одного провода, вытянутого вдоль трубки (12) и соединенного своим дистальным концом с концом рычага, противоположного опорной лапе.
12. Устройство по п. 1, отличающееся тем, что инструмент контроля (18) является датчиком, работающим на принципе токов Фуко, или ультразвуковым датчиком, или камерой.
| US 20090154293 A1, 18.06.2009 | |||
| EP 1998173 A1, 03.12.2008 | |||
| US 6968730 B2, 29.11.2005 | |||
| RU 2004130363 A, 20.03.2006 | |||
| Сканирующее устройство к дефектоскопам | 1972 |
|
SU440597A1 |

