Настоящее изобретение относится к гибкой поворотной конструкции, предназначенной для внутреннего контрольного осмотра механической системы, такой как, например, турбомашина, посредством, в частности, датчика, работающего на принципах токов Фуко или ультразвука.
Некоторые используемые в настоящее время гибкие и поворотные конструкции, такие как эндоскоп или держатель зонда неразрушающего контроля, представлены в виде длинных жестких или эластично деформируемых трубок, содержащих конец, поворачивающийся относительно продольной оси для выбора угла установки в определенном положении, и облегчения постепенного продвижения эндоскопа или держателя зонда.
Для изгибания соответствующим образом определенной зоны эндоскопа уже было предложено расположить вдоль его конструкции механические приводы, такие как проволоки натяжения или проволоки, выполненные из материала с эффектом памяти. Эти приводы видят их уменьшенную длину путем натяжения или также в результате повышения температуры, что приводит к изменению изгиба эндоскопа в зонах, где размещены приводы.
Однако для данного типа устройства присущи ограничения, обусловленные в основном недостатком подвижности и удобства управления в геометрически сложных или незначительных по размерам пространствах. Кроме того, оно также ограничено в возможности изгибания конца эндоскопа.
Для решения данных проблем заявителем было предложено в его заявке FR 07/06726 установить привод на части с изменяемой жесткостью продольного корпуса устройства для получения небольшого изгибания в зонах с большой жесткостью и большего изгибания в зонах с меньшей жесткостью для достижения изменяемого профиля изгиба устройства.
Однако изгибы, которые можно получить с данным типом устройства, а также с ранее перечисленными устройствами, остаются ограниченными, что ограничивает их возможности использования.
Кроме того, в некоторых случаях контрольного осмотра турбомашины может быть желательным осуществить прочное и надежное зацепление устройства на неподвижно установленных частях турбомашины для проведения неразрушающего контроля и/или ограничения воздействия силы тяжести на все устройство и продолжения контрольного осмотра турбомашины.
Задачей изобретения является, в частности, разработка простого, экономически выгодного и эффективного решения этих проблем, позволяющего избежать недостатков, присущих известным технологиям.
Для решения этой задачи предлагается гибкая и поворотная конструкция неразрушающего контроля, содержащая продольный корпус и, по меньшей мере, один привод, позволяющий видоизменять изгиб, по меньшей мере, части продольного корпуса, отличающаяся тем, что привод удерживается держателем, сопряженным с продольным корпусом, дистальная часть которого расположена в стороне или смещена от продольного корпуса и соединена с частью продольного корпуса проволокой натяжения.
В отличие от предыдущих технологий в изобретении предлагается больше не размещать привод вдоль продольного корпуса, но установить его на держателе, расположенном в стороне от него.
В этом техническом решении держатель образует плечо рычага, облегчающее изгибание продольного корпуса, которое осуществляется посредством силы, оказываемой сбоку относительно продольного корпуса и в направлении проволоки натяжения, а не вдоль продольного корпуса, что позволяет усилить изгибание продольного корпуса.
Передаточное отношение, т.е. соотношение между углом изгибания и уменьшением длины привода, меньше, чем на основе достигнутого уровня техники. Это позволяет получить значительно более точную установку согнутой части продольного корпуса.
Усилие, являющееся результатом управления приводом, лучше передается на продольный корпус. Такая хорошая передача усилия позволяет осуществить прочное зацепление гибкой конструкции путем изгибания и опоры части продольного корпуса на неподвижно установленную часть трехмерной конструкции для пространственного обследования. Представляется, таким образом, возможным обеспечить, чтобы датчик неразрушающего контроля, установленный на дистальном конце продольного корпуса, находился в статичном положении для выполнения операций неразрушающего контроля.
В авиастроительной промышленности изобретение позволяет, таким образом, проводить обследование зон турбомашины, которые не были доступны без демонтажа турбомашины, что способствует сокращению времени нахождения в выключенном состоянии и снижению расходов.
Согласно другой отличительной особенности изобретения привод выполнен из материала с эффектом памяти.
Как вариант, привод может быть механическим и содержать кабель, непосредственно соединенный с проволокой натяжения продольного корпуса и который вытянут вдоль дистальной части держателя.
Дистальная часть держателя может быть жесткой, и в этом случае привод может быть кабелем, таким как это было описано выше.
Как вариант, дистальная часть держателя может быть деформируемой, и в этом случае привод может содержать материал с эффектом памяти формы, напряжение которого управляет деформацией дистальной части держателя и приводит к натяжению на проволоке, соединяющей с продольным корпусом.
Согласно способу практической реализации изобретения проволока натяжения продольного корпуса соединена с последним на расстоянии от его дистального конца в зоне, предназначенной для обеспечения точечной или почти точечной опоры на неподвижно установленный элемент предполагаемой для контрольного осмотра конструкции для образования точки оси вращения.
Данная точка оси вращения расположена между дистальным концом продольного корпуса и точкой соединения проволоки натяжения с продольным корпусом. Таким образом, представляется возможным произвести угловое отклонение с дистальным концом продольного корпуса, что может быть признано полезным, когда имеется желание непрерывно наблюдать некоторую угловую протяженность внутренней части конструкции, контрольный осмотр которой предполагается произвести.
Как вариант проволока натяжения соединена с дистальным концом продольного корпуса или рядом с этим дистальным концом.
Предпочтительно средствами неразрушающего контроля, установленными на дистальном конце продольного корпуса, являются, например, зонды, работающие на принципе токов Фуко, или ультразвуковые зонды.
При практической реализации изобретения проволока натяжения является металлической.
Продольный корпус может также содержать по меньшей мере одну часть, снабженную по меньшей мере одним приводом механического типа или с эффектом запоминания формы для осуществления дополнительного изгибания продольного корпуса.
В дальнейшем изобретение поясняется описанием, приведенным в качестве примера, не имеющего ограничительного характера, со ссылкой на прилагаемые чертежи, на которых:
- фиг.1 и 2 представляют собой схематичные виды осевых сечений двух гибких и поворотных конструкций, согласно достигнутому уровню техники;
- фиг.3 представляет собой схематичный вид осевого сечения гибкой и поворотной конструкции согласно изобретению;
- фиг.4 представляет собой схематичный вид осевого сечения гибкой и поворотной конструкции, показанной на фиг.3, в изогнутом положении;
- фиг.5 представляет собой схематичный вид осевого сечения гибкой и поворотной конструкции согласно другой практической реализации изобретения;
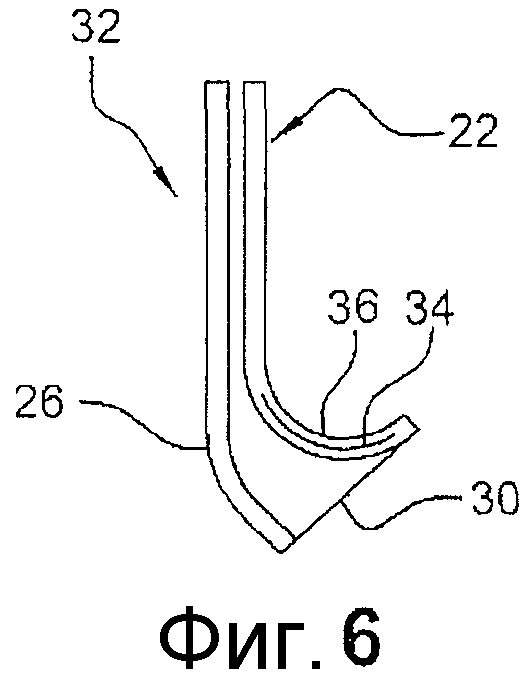
- фиг.6 представляет собой схематичный вид осевого сечения гибкой и поворотной конструкции, представленной на фиг.5, в изогнутом положении;
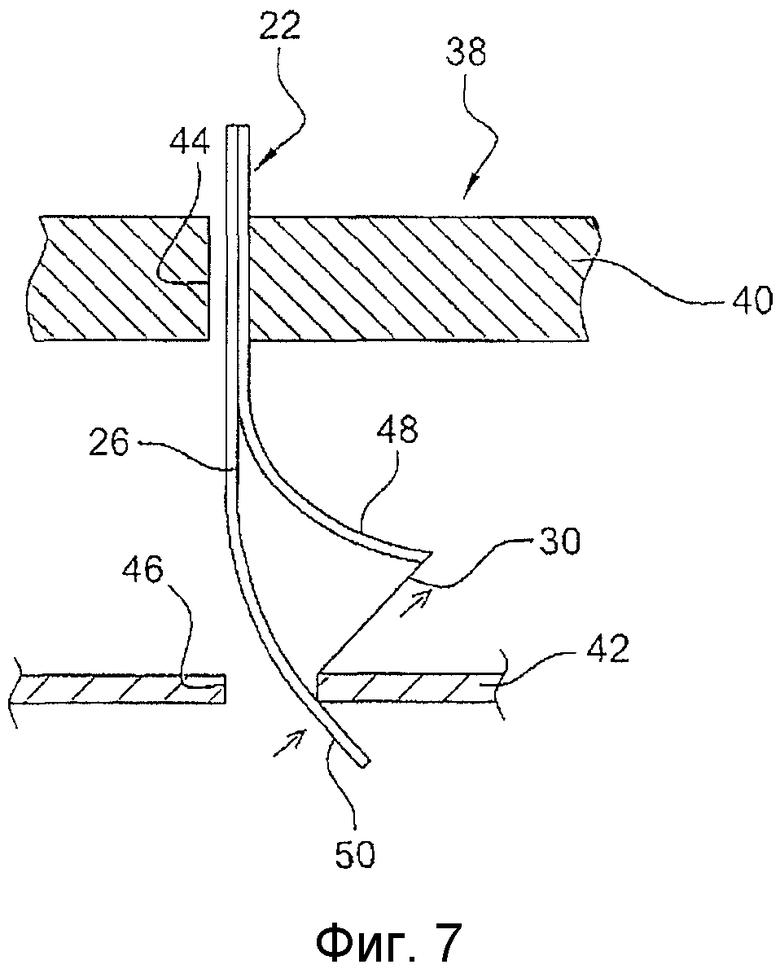
- фиг.7 представляет собой схематичный вид осевого сечения и в положении зацепления гибкой и поворотной конструкции согласно изобретению;
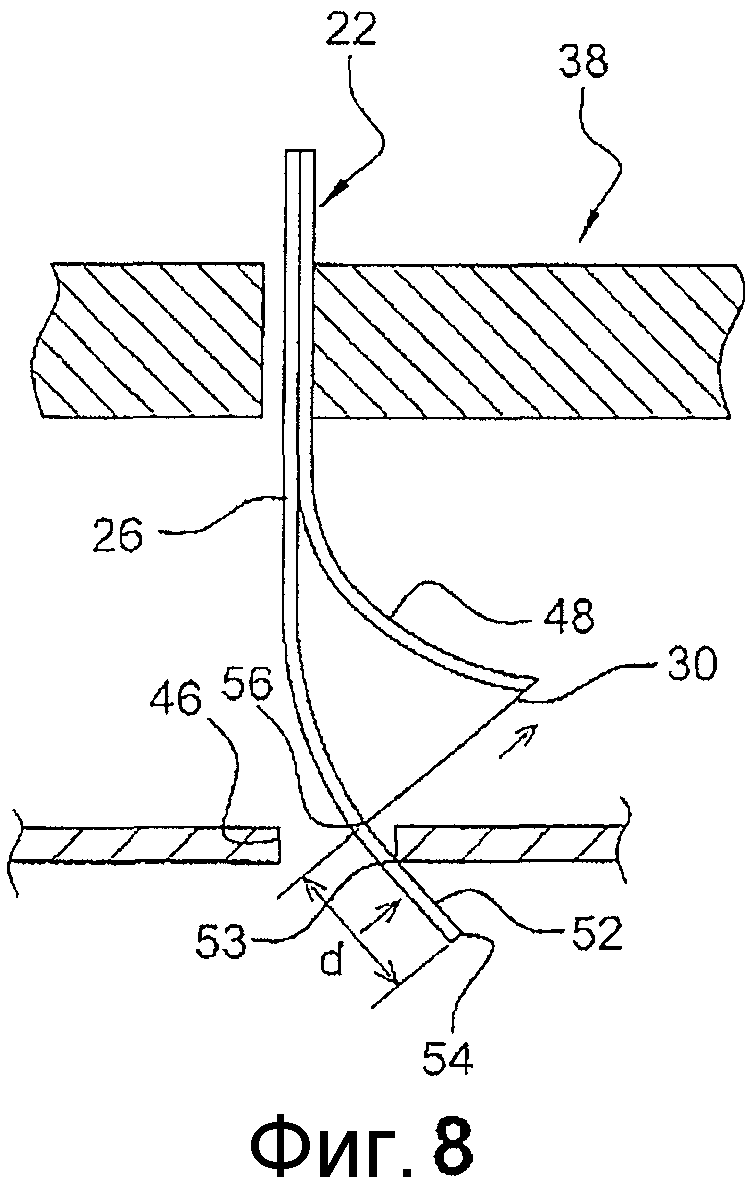
- фиг.8 представляет собой схематичный вид осевого сечения гибкой и поворотной конструкции согласно изобретению, опирающейся на неподвижно установленную конструкцию, контрольный осмотр которой предполагается произвести;
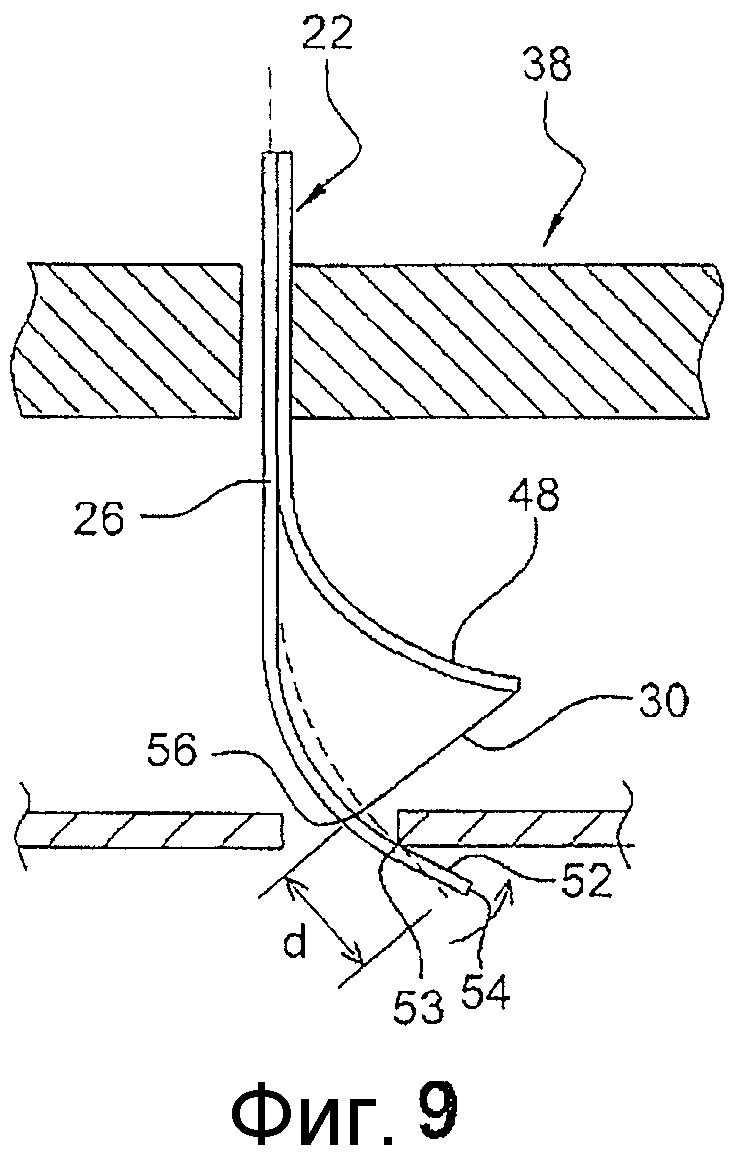
- фиг.9 представляет собой схематичный вид, иллюстрирующий перемещение гибкой и поворотной конструкции, показанной на фиг.8.
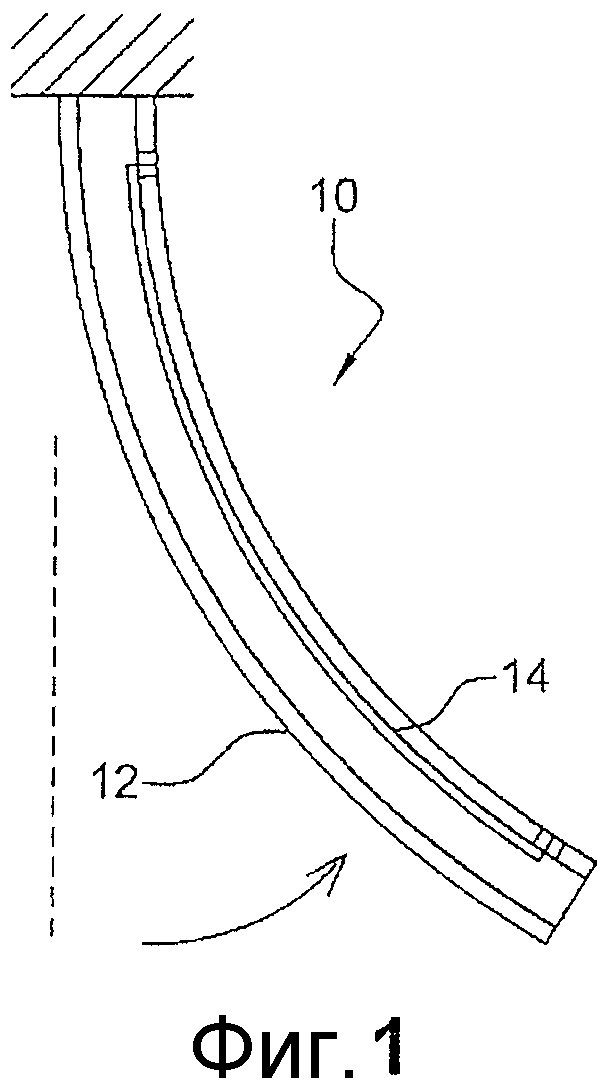
Прежде всего ссылка делается на фиг.1, на которой изображена гибкая и поворотная конструкция 10 неразрушающего контроля на основе достигнутого уровня техники, содержащая продольный корпус 12, оснащенный приводом 14, выполненным из материала с эффектом запоминания формы, который расположен вдоль продольного корпуса 12 и внутри него. Этот привод 14 представлен, например, в виде проволоки, соединенной со средствами электропитания, позволяющими обеспечить нагревание проволоки посредством теплового действия тока. Нагревание проволоки 14 вызывает ее напряжение, что приводит к изгибанию продольного корпуса 12.
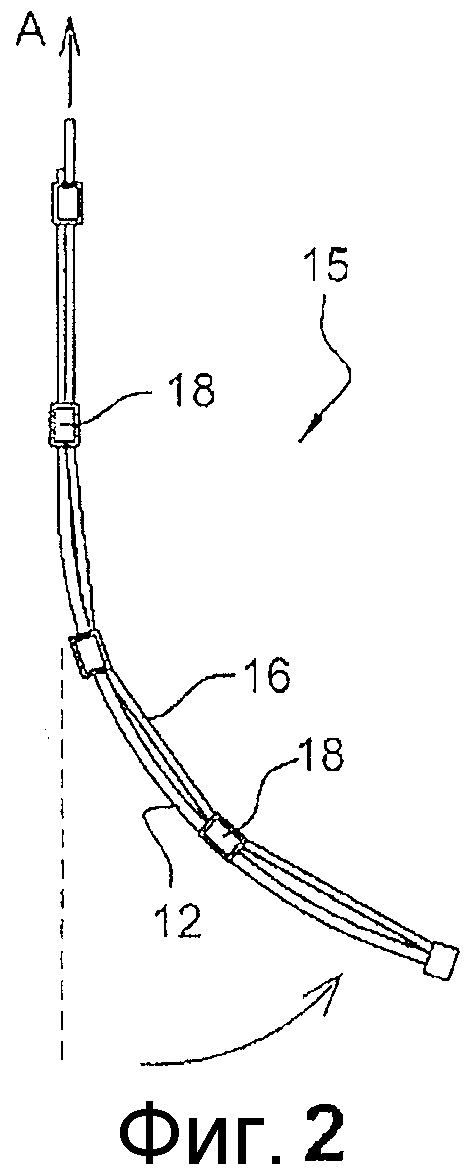
Фиг.2 изображает поворотную и гибкую конструкцию 15, аналогичную представленной на фиг.1, которая отличается тем, что приводом является металлическая проволока 16, вытянутая вдоль продольного корпуса 12 до дистального конца продольного корпуса 12. Проволока 16 удерживается вдоль продольного корпуса 12 при помощи множества полых направляющих 18, закрепленных на продольном корпусе 12. С данным типом конструкции для контроля растяжение (стрелка A), прилагаемое на проксимальном конце проволоки 16 приводит к изгибанию дистального конца продольного корпуса 12.
Эти конструкции 10, 15 не допускают большого изгибания и точной установки изогнутой части продольного корпуса 12. Они больше не позволяют осуществить устойчивое статическое зацепление конструкции для контроля на неподвижно установленной части, окруженной механической конструкцией, контрольный осмотр которой предполагается осуществить, по причинам, детально изложенным ранее.
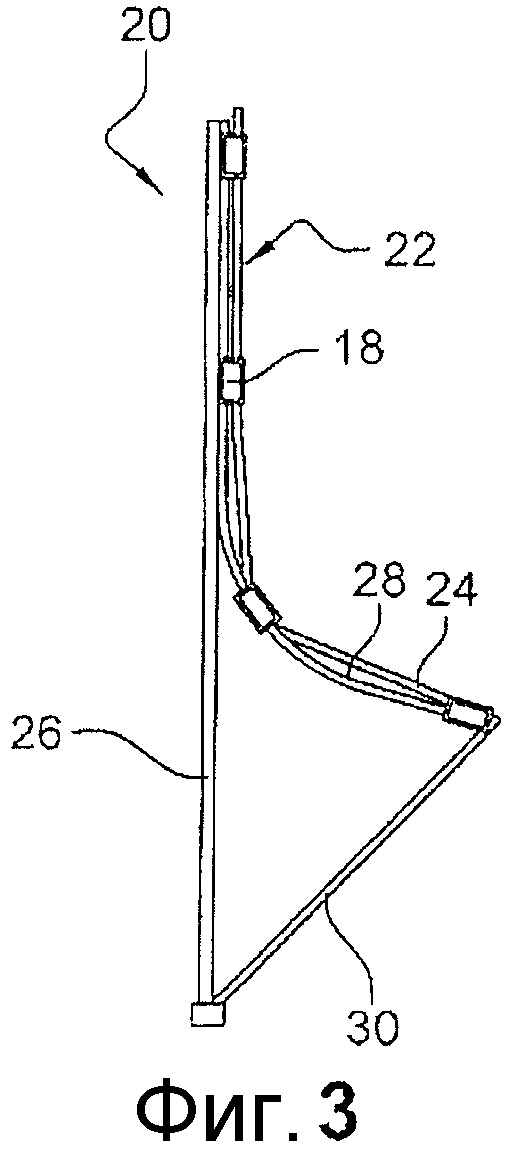
В изобретении предлагается присоединить к гибкой и поворотной конструкции 20 держатель 22, дистальная часть 24 которого расположена в стороне или смещена относительно продольного корпуса 26 и удерживает привод 28; причем эта дистальная часть 24 соединена с продольным корпусом 26 проволокой натяжения 30.
Согласно практической реализации изобретения изображенной на фиг.3 и 4, дистальная часть 24 является жесткой. Привод 28 является кабелем, который вытянут вдоль держателя 22 в полых направляющих 18, прикрепленных к держателю 22. Привод 28 непосредственно прикреплен на уровне конца дистальной части 24 держателя 22 к проволоке 30 натяжения, соединенной с дистальным концом продольного корпуса 26.
Растяжение (стрелка B), приложенное на проксимальном конце кабеля 28, приводит к изгибанию дистального конца продольного корпуса 26, причем держатель 22 остается неподвижным во время этой операции (фиг.4).
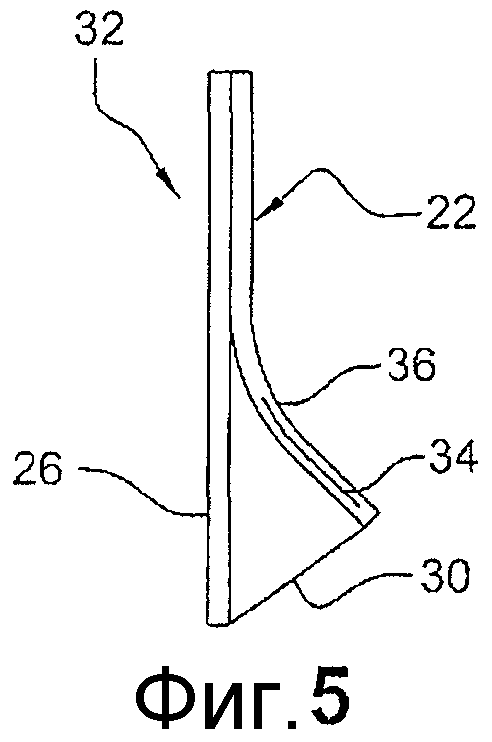
Согласно другой практической реализации изобретения, изображенной на фиг.5 и 6, гибкая и поворотная конструкция 32 содержит привод 34, представленный в виде проволоки, выполненной из материла с эффектом памяти формы, включенной в дистальную часть 36 держателя 22, которая является деформируемой. Дистальная часть 36 соединена с продольным корпусом 26 посредством проволоки натяжения 30.
Нагревание проволоки, выполненной из материала с эффектом запоминания формы, приводит к ее напряжению, вызывающему сгибание дистальной части 36 держателя 22, провоцируя изгибание продольного корпуса 26 (фиг.6).
Согласно двум практическим реализациям, описание которых приведено выше, продольный корпус 26 может быть из эластично деформируемого материала, что позволяет осуществить его возврат в положение покоя (фиг.3 и 5), когда ослабляется кабель растяжения 28 или также, когда прекращается нагревание проволоки 34, выполненной из материала с эффектом памяти формы.
Дистальная часть 24, 36 держателя 22 образует плечо рычага для изгибания продольного корпуса 26, позволяя осуществить точную установку согнутой части продольного корпуса 26 вследствие передаточного отношения (угол сгибания к длине уменьшения привода), которое меньше, чем на основе достигнутого уровня техники. Таким образом, для одного и того же угла изгибания продольного корпуса 26 представляется необходимым иметь большее уменьшение длины привода 28, 34 по сравнению с достигнутым уровнем техники.
На фиг.7 изображено осевое сечение конструкции 38, контрольный осмотр которой предполагается осуществить, содержащее две стенки 40, 42, расположенные друг от друга на расстоянии и содержащие два отверстия 44, 46 для прохода гибкой и поворотной конструкции согласно изобретению.
При монтаже, изображенном на этой фигуре чертежа, проволока натяжения 30 соединена с дистальным концом продольного корпуса 26. Продольный корпус 26 введен в два отверстия 44, 46, а держатель 22 введен в первое отверстие таким образом, чтобы его дистальная часть 48 была расположена между двумя стенками 40, 42. Управление приводом дистальной части 48 вызывает сгибание продольного корпуса 26 и подводит дистальный конец 50 продольного корпуса 26 к упору на край второго отверстия. Кроме того, часть проволоки 30 натяжения в непосредственной близости от продольного корпуса накладывается на внутреннюю поверхность второго отверстия 46 во время изгибания продольного корпуса 26.
Таким образом, осуществляется устойчивое и статическое расположение продольного корпуса 26 на второй стенке 42. Такое расположение тем стабильней, если сила упора прилагается сбоку к продольному корпусу 26 от расположенной в стороне дистальной части 48. Такая передача силы привода посредством проволоки 30 натяжения особенно важна при небольших изгибаниях, как правило меньше 30°.
На фиг.8 изображена конструкция 38, контрольный осмотр которой предполагается осуществить, аналогичная конструкции, изображенной на фиг.7. Проволока натяжения 30 соединена с продольным корпусом 26 на расстоянии d от его дистального конца 54. Продольный корпус 26 вставлен внутрь второго отверстия 46 таким образом, что во время изгибания его оконечная часть 52 опирается, точечно или почти точечно, на кромку (край) второго отверстия (фиг.8).
Такое техническое решение позволяет образовать точку оси вращения 53 между дистальным концом 54 продольного корпуса 26 и точкой 56 соединения проволоки 30 натяжения с продольным корпусом 26.
В случае, когда продольный корпус 26 эластично деформируется, повторяющееся управление приводом, удерживаемым дистальной частью 48 держателя 22, позволяет осуществить угловое отклонение относительно дистального конца продольного корпуса 26.
Привод, позволяющий осуществить угловое отклонение, может быть тем же приводом, что и привод, используемый для начального изгибания (фиг.8) продольного корпуса в случае механического привода, такого как кабель; причем продолжение растяжения приводит к вращению вокруг оси дистального конца продольного корпуса 26. В случае начального изгибания (фиг.8), осуществляемого с проволокой, выполненной из материала с эффектом памяти формы, вторая проволока, также выполненная из материала с эффектом памяти формы, может быть присоединена к дистальной части 48 держателя 22, а повторяющееся приведение в действие этой второй проволоки позволяет осуществить угловое отклонение дистального конца 54 продольного корпуса 26.
Монтаж гибкой и поворотной конструкции 20, 32 в механической конструкции типа конструкции, изображенной на фиг.7 и 8, осуществляется путем помещения прежде всего не изогнутого продольного корпуса 26 через первое и второе отверстия 44, 46. Держатель 22 также вставлен через первое отверстие 44 путем вращения вокруг оси, а затем продольного перемещения, а затем проволока 30 натяжения напрягается для расположения конструкции 20, 32 в положении ожидания, как это показано на фиг.3-5.
Средства неразрушающего контроля (не показаны) могут быть установлены на дистальном конце продольного корпуса 26. Этими средствами являются, например, зонды, работающие на принципах токов Фуко, или ультразвуковые зонды.
Согласно другим вариантам изобретения гибкая конструкция 20, 32 содержит по меньшей мере один механический привод 16 или привод с эффектом памяти формы 14, присоединенный к продольному корпусу 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА ДЕФЕКТОВ НА ДЕТАЛЯХ ПОСРЕДСТВОМ ЭНДОСКОПИИ | 2012 |
|
RU2598157C2 |
| ОРИЕНТИРУЕМАЯ СТРУКТУРА ТИПА КАТЕТЕРА ИЛИ ЭНДОСКОПА | 2008 |
|
RU2503049C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДЕТАЛИ В ТУРБОМАШИНЕ | 2012 |
|
RU2598906C2 |
| КРИОЗОНД | 2020 |
|
RU2819009C2 |
| ДЕРЖАТЕЛЬ ЗОНДА | 2018 |
|
RU2761030C2 |
| ЭНДОСКОП С ПОВОРОТНОЙ ПРИЗМОЙ | 2009 |
|
RU2538626C2 |
| СПОСОБ ОСТАНОВКИ КРОВОТЕЧЕНИЯ ИЗ ВАРИКОЗНО РАСШИРЕННЫХ ВЕН ПИЩЕВОДА И ТРАНСФОРМИРУЕМЫЙ ЗОНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2316272C2 |
| МЕДИЦИНСКОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ И/ИЛИ ИССЛЕДОВАНИЯ ТКАНИ | 2018 |
|
RU2785000C2 |
| ПЛАЗМЕННЫЙ ЗОНД ДЛЯ ПЛАЗМЕННОЙ КОАГУЛЯЦИИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2021 |
|
RU2835054C2 |
| КАТЕТЕР С ОДНООСНЫМИ ДАТЧИКАМИ | 2011 |
|
RU2503408C2 |

Изобретение относится к энергетике. Гибкая поворотная конструкция неразрушающего контроля содержит продольный корпус и привод, позволяющий изменять изгиб части продольного корпуса, причем привод удерживается держателем, сопряженным с продольным корпусом, дистальная часть которого расположена в стороне или смещена относительно продольного корпуса и соединена с частью продольного корпуса посредством проволоки натяжения. Изобретение позволяет установить более точную установку согнутой части продольного корпуса. 9 з.п. ф-лы, 9 ил.
1. Гибкая поворотная конструкция (20, 32) неразрушающего контроля содержит держатель (22), связанный с продольным корпусом (26), продольный корпус (26) и по меньшей мере один привод (28, 34), позволяющий изменять изгиб, по меньшей мере, части продольного корпуса (26), отличающаяся тем, что привод (28, 34) удерживается держателем (22), дистальная часть (24, 36, 48) которого расположена в стороне или смещена относительно продольного корпуса (26) и соединена с частью продольного корпуса (26) посредством проволоки (30) натяжения, причем проволока натяжения (30) отлична от держателя (22) и привода (28, 34).
2. Конструкция по п. 1, отличающаяся тем, что привод (34) выполнен из материала с эффектом памяти формы.
3. Конструкция по п. 1, отличающаяся тем, что привод (28) проходит снаружи продольного корпуса (26), а несущий его держатель (22) сформирован снаружи продольного корпуса (26), связан с ним и вытянут вдоль него, причем дистальная часть (24, 36, 48) держателя (22) выполнена с возможностью углового отклонения относительно дистального конца продольного корпуса (26).
4. Конструкция по п. 1, отличающаяся тем, что привод содержит кабель (28), который соединен непосредственно с проволокой (30) натяжения продольного корпуса (26) и который вытянут вдоль дистальной части (24) держателя (22).
5. Конструкция по п. 4, отличающаяся тем, что дистальная часть (24, 36) является жесткой или деформируемой.
6. Конструкция по п. 1, отличающаяся тем, что проволока (30) натяжения продольного корпуса (26) соединена с последним на расстоянии d от своего дистального конца.
7. Конструкция по п. 1, отличающаяся тем, что проволока (30) натяжения соединена с дистальным концом продольного корпуса (26) или рядом с этим дистальным концом (26).
8. Конструкция по п. 1, отличающаяся тем, что дистальный конец продольного корпуса (26) снабжен средствами неразрушающего контроля, такими как, например, зонды, работающими на принципе токов Фуко, или ультразвуковые зонды.
9. Конструкция по п. 1, отличающаяся тем, что проволока (30) натяжения является металлической.
10. Конструкция по п. 1, отличающаяся тем, что продольный корпус (26) содержит по меньшей мере одну часть, снабженную по меньшей мере одним приводом механического типа (16) или с эффектом памяти формы (14).
| US 7591781 B2, 22.09.2009 | |||
| ПАПИЛЛОТОМ СМЕТ-2 | 1992 |
|
RU2057488C1 |
| US 4930494 A, 05.06.1990 | |||
| US 5531664 A, 02.07.1996 | |||
| US 2008065107 A1, 13.03.2008 | |||
| СПОСОБ ПОЛУЧЕНИЯ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ ИЗ УГЛЕВОДОРОДОВ ЖИРНОГО РЯДА | 1935 |
|
SU46915A1 |

