Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения геометрических размеров труб, лопаток газотурбинных двигателей и других профильных изделий машиностроения - внешнего и внутреннего диаметра, толщины стенки, площади поперечного сечения.
Известны устройства для измерения геометрических параметров объектов, в том числе труб, содержащие телекамеру и устройства обработки, основанные на формировании изображения контролируемого объекта на поверхности ПЗС матрицы телекамеры с дальнейшей передачей данных в ЭВМ и программной обработкой результатов [а.с. SU 1837160, МКИ G01B 21/30, бюлл. №32, 1993; а.с. SU 2052768, МКИ G01B 17/00, бюл. №22, 1995; а.с. SU 1657960, МКИ G01B 21/10, бюл. №23, 1991; а.с. SU 1675664, МКИ G01B 11/02, бюл. №33, 1991; а.с. SU 1716327, МКИ G01B 21/20, бюл. №8, 1992; патент RU №2163395, G06K 9/52, 2000], патент на полезную модель №32261, б.и. №25 от 10.09. 2003.
Недостатком известных устройств является низкая точность, связанная с оптическими искажениями изображения на границах приемной матрицы, а также зависимостью размера изображения от расстояния объектива телекамеры до контролируемого объекта. Это затрудняет их применение в устройствах оперативного контроля в тех случаях, когда расстояние до контролируемого объекта не известно или не фиксировано.
Прототипом заявляемого изобретения является телевизионное устройство, содержащее четыре (шесть) телекамеры, сгруппированные парами, разнесенные на фиксированные расстояния по ортогональным координатам и соединенные с видеоконтрольным устройством, выход которого подключен к устройству масштабирования и устройству обработки (патент РФ на полезную модель №73069, б.и. №13 от 10.05. 2008).
Недостатками прототипа являются сложность конструкции, связанная с наличием одновременно четырех (шести) телекамер, сложность процедуры измерений, связанная с настройкой на объект, так как расстояние между камерами жестко фиксировано, то габаритный объект может не попадать в зону захвата одновременно всех камер.
Поставлена задача: упростить конструкцию и процедуру измерений, при сохранении точности.
Решение поставленной задачи достигается тем, что в известном устройстве, содержащем телекамеру, соединенную через устройство ввода с видеоконтрольным устройством обработки, телекамера размещена на поворотной платформе, на которой дополнительно установлен лазерный дальномер и датчик азимутальных углов, выходы которых подключены к входам устройства обработки.
Это позволяет формировать полное изображение объекта на экране видеоконтрольного устройства при разных углах съемки, определять масштаб плоского изображения по каждой координате, проводить измерения независимо от взаимной ориентации камеры и объекта с учетом искажений, возникающих в оптической системе и видеоконтрольном устройстве.
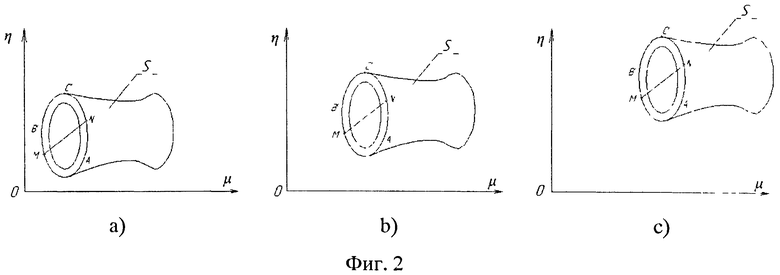
Сущность изобретения поясняется чертежами, где на фигуре 1 приведена структурная схема предложенного устройства, а на фигуре 2 - изображения контролируемого объекта, получающиеся на экране видеоконтрольного устройства при разных углах наклона поворотной платформы.
Устройство состоит из телекамеры 2, закрепленной на платформе 1, способной вращаться в горизонтальной (угол α) и вертикальной (угол β) плоскостях. На поверхности платформы установлен также лазерный дальномер 3, оптическая ось которого параллельна оптической оси камеры, а также датчик азимутальных углов 4, формирующий сигналы, пропорциональные углам α и β.
Вращение платформы задается вручную специальным микрометрическим механизмом, который не показан. Выходы телекамеры, дальномера и датчика угла соединены с входом устройства обработки 5, соединенным с видеоконтрольным устройством 6. На фигуре 1 показаны также контролируемый объект S, на котором показаны три произвольные точки A, B, C, используемые при калибровке. На фигуре 2 показано изображение контролируемого объекта на экране видеоконтрольного устройства при трех разных углах обзора. Причем на фигуре 2а показано изображение объекта при наведении лазерного дальномера на точку A[SA=S((αA,βA)]; на фигуре 2b - при наведении дальномера на точку B[SB=S(αB,βB)];, на фигуре 2c - при наведении дальномера на точку C[SC=S(αC,βC)].
На фигуре 2 координаты µ, η определяют точки на плоскости фотоматрицы телекамеры и, следовательно, видеоконтрольного устройства. На фигуре 2 видно, что при разных углах съемки изображение объекта формируется в разных точках фотоматрицы и, следовательно, отображается в разных точках экрана видеоконтрольного устройства.
Сущность работы устройства состоит в следующем. Устройство устанавливается в зоне обзора камеры. На объекте выбираются три произвольные точки A, B, C, находящиеся на контролируемой поверхности (плоскости, линии). С помощью поворотного стола на точку A наводится лазерный дальномер, фиксируются углы положения поворотного стола, соответствующие этой точке αA, βA, измеряется расстояние от камеры до точки A, делается съемка объекта при полученных углах, получают изображение SA=S(αA,βA) (фиг.2а). Затем поочередно наводят дальномер на точки B и C и получают изображение объекта при углах, соответствующих выбранным точкам SB=S((αB,βB), SC=S(αC,βC). Таким образом, получено три плоских изображения объемного изделия. Полученные изображения и лазерные измерения дают возможность проводить полный анализ геометрических размеров изделия. Каждое изображение имеет свой масштаб на экране. Определение этого масштаба является одной из промежуточных задач процедуры измерений. Для определения масштаба каждого изображения необходимо соотнести реальные размеры отрезков AB, AC и BC с их длиной на каждом экране. Реальные размеры указанных отрезков в пространстве определяются по формулам.



где 








В формулах (4)-(12) величины ρA, ρB, ρC определяются лазерным дальномером; величины αA, αB, αC, βA, βB, βC - датчиком углов.
На экране видеоконтрольного устройства расположенные в пространстве отрезки AB, AC и BC преобразуются в расположенные на плоскости экрана отрезки A'B', A'C' и B'C' (см. фигуру 2). Длина указанных отрезков на экране дисплея определяется через их координаты по формулам:



Для того чтобы проводить измерения реального объекта по его плоскому изображению, необходимо определить масштаб, то есть цену деления одного пиксела изображения по координатам µ, η, соответствующим реальным размерам объекта в пространстве. Для этого введем коэффициенты масштабирования по координатам и сравним реальные отрезки (1) - (3) с их плоскими изображениями на экране (13) - (15). Из условий A'B'=A'B' и AC=A'C' получаем следующие уравнения:

где Rµ, Rη - масштабирующие коэффициенты по координатам µ, η.
Совместное решение этих уравнений даст значения Rµ, Rη, которые определяют метрологическое соответствие между реальными размерами объекта в пространстве с его плоским изображением на экране. Из системы (16) находим:

где 
Тогда любой произвольный размер MN между произвольными точками на контролируемом объекте определится по формуле

При этом вычисление размера может производиться по любому из изображений фигуры 2.
Изобретение позволяет практически полностью устраниться от влияния перекосов контролируемого объекта относительно оптической оси камеры. При этом, если камерой захватывается все изображение объекта, устройство обработки можно запрограммировать не только на измерение каких-то размеров, но и проводить анализ формы, вычислять центр тяжести, момент сопротивления и т.д. Устройство позволяет значительно повысить точность оперативных измерений геометрических параметров объектов, сделав их независимыми от взаимного расположения телекамеры и контролируемого объекта при использовании в широком диапазоне измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ ЖИДКОСТИ В РЕЗЕРВУАРЕ | 2011 |
|
RU2497085C2 |
| Способ бесконтактного измерения электромагнитных параметров материалов | 2015 |
|
RU2610878C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| Способ дистанционного контроля уровня и плотности жидкости в резервуаре | 2015 |
|
RU2614343C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА | 2015 |
|
RU2601494C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФАЗНОЙ ЕМКОСТИ ЭЛЕКТРОСЕТИ | 2012 |
|
RU2510034C1 |
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА | 1986 |
|
SU1841052A1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТИПА ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2492524C2 |
Устройство относится к контрольно-измерительной технике и может быть использовано для измерения геометрических размеров профильных объектов. Устройство состоит из телекамеры 2, закрепленной на платформе 1, вращаемой в горизонтальной (угол α) и вертикальной (угол β) плоскостях. На поверхности платформы установлен лазерный дальномер 3, оптическая ось которого параллельна оптической оси камеры, датчик азимутальных углов 4, формирующий сигналы, пропорциональные углам α и β. Вращение платформы задается вручную специальным микрометрическим механизмом, который не показан. Выходы телекамеры, дальномера и датчика угла соединены с входом устройства обработки 5, соединенным с видеоконтрольным устройством 6. Техническим результатом изобретения является упрощение конструкции и процедуры измерений при сохранении точности. 2 ил.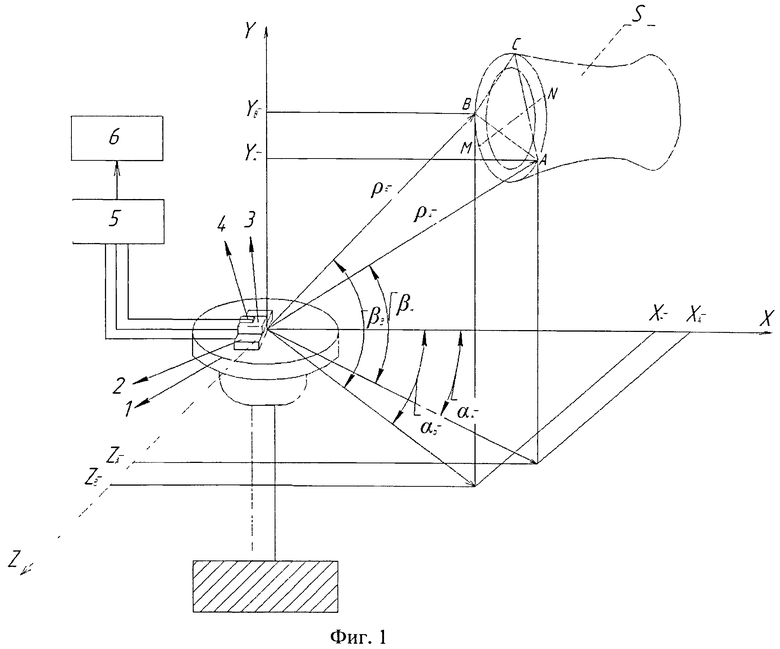
Устройство дистанционного измерения геометрических параметров профильных объектов, содержащее телекамеру и лазерный дальномер, выходы которых подключены к устройству обработки, отличающееся тем, что телекамера и лазерный дальномер размещены на двухкоординатной поворотной платформе, снабженной датчиком азимутальных углов, выход которого подключен к устройству обработки, причем оптическая ось телекамеры параллельна лазерному лучу дальномера.
| Способ выделения альфа-пропиленхлоргидрина из смеси его с бета-пропиленхлоргидрином | 1957 |
|
SU108136A1 |
| WO 9630718 A1, 3.10.1996 | |||
| US 20050105076 A1, 19.05.2005, | |||
| CN 0101718523 A, 02.06.2010, | |||
| US2002036779 A1, 28.03.2002 | |||

