Изобретения относится к области измерительной техники, в частности к топогеодезии и навигации, и могут быть использованы при выполнении поисковых и спасательных работ, для регистрации координат удаленных объектов (морских, воздушных судов и т.п.), при патрулировании границ, обследовании районов стихийных бедствий и др.
Известна (см., напр., патент РФ №2123165) оптико-лазерная система для прицеливания и дальнометрирования воздушных целей. Система состоит из лазерного излучателя с блоком накачки и приемника излучения, входящих в состав оптической следящей системы, и дальномерного канала, а также блока вычислений. При этом прицельная следящая система содержит зеркало, установленное с возможностью поворота, положение которого определяется по сигналу, вырабатываемому блоком вычислений. Для уменьшения расходимости луча используется телескопический объектив.
Недостатком системы является ее сравнительно узкое применение - в основном для ракет класса "воздух-воздух" и, тем самым, невозможность использования с позиций на местности для поиска и локализации объектов как наземных, так и воздушных в определенной системе координат. Кроме того, весь комплекс является довольно сложным и дорогостоящим.
Известна оптико-электронная система поиска и сопровождения цели (патент РФ №2155323), которая содержит подвижное зеркало с датчиком углов и приводами, спектроделительный фильтр, пеленгационный канал, формирующий сигнал рассогласования между оптической осью системы и направлением на цель, а также передающий и приемный лазерные каналы. В режиме поиска просмотр пространства целей осуществляется подвижным зеркалом по сигналам рассогласования между информациями пеленгационного канала и внешней системой целеуказания. Сигнал рассогласования между оптической осью системы и направлением на цель по двум координатам - азимуту и высоте подается на приводы подвижного зеркала, приводя изображение цели в центр поля зрения чувствительных площадок. Далее производится переход в режим слежения и дальнометрирования.
Недостатком системы является необходимость использования в ней сложных дорогостоящих специальных оптических систем.
Известно устройство для измерения сферических координат, содержащее лазерный дальномер с цифровым индикатором и блок измерения магнитного азимута и угла тангажа, в котором блок измерения магнитного азимута и угла тангажа выполнен в виде двух датчиков соответствующих углов, установленных в кардановом подвесе, каждый из которых состоит из диска с углоизмерительным кодом и считывающей оптотронной пары с излучателем и приемником, причем ось внешней рамки карданова подвеса установлена в корпусе лазерного дальномера параллельно оси визира, на внешней рамке по ее оси размещена оптотронная пара датчиков угла тангажа, охватывающая углоизмерительный диск, который размещен на оси внутренней рамки, являющейся корпусом магнитного компаса, установленной перпендикулярно оси внешней рамки со смещением центра массы, на внутренней рамке размещена оптотронная пара датчиков магнитного азимута, охватывающая углоизмерительный диск, являющийся картушкой магнитного компаса, который размещен на внутренней оси внутренней рамки, установленной перпендикулярно оси внешней рамки и внешней оси внутренней рамки, при этом выходы датчиков углов соединены с соответствующими дополнительными входами цифрового индуктора (Патент РФ №1827136).
Недостатком указанного технического решения является невысокая точность и надежность измерения в связи с отсутствием учета изменения положения наблюдателя, а также низкое быстродействие прибора и информативность его выходных данных.
Наиболее близким техническим решением к предлагаемому изобретению является устройство для измерения сферических координат удаленного объекта и способ определения координат удаленного объекта на местности, содержащее оптико-электронный прибор, указатель курса и позиции наблюдателя, бесплатформенный инерциальный блок, альтиметр и микропроцессор. Причем оптико-электронный прибор, лазерный дальномер и указатель курса и позиции наблюдателя скреплены между собой жестко. Бесплатформенный инерциальный блок и альтиметр подключены раздельно к входам микропроцессора и размещены в корпусе указателя курса и позиции наблюдателя. Кроме того, в него введен индикатор указателя курса и позиции наблюдателя и объекта. Указатель снабжен разъемами для связи с этим индикатором, и оптико-электронным прибором (Патент РФ №2381447).
Недостатком устройства является наличие большого количества компонентов, в частности унифицированного посадочного места, оправы с полупрозрачной пластиной и дополнительным индикатором и т.д., что приводит к уменьшению точности и надежности системы в целом, а также к увеличению ее габаритов и веса. Наличие в составе системы магнитометра (указателя курса) не позволяет использовать ее при воздействии сильных магнитных полей. Кроме того, требуется периодическая калибровка прибора.
Техническим результатом изобретения является расширение функциональных возможностей устройства наблюдения и способа его применения с одновременным уменьшением габаритов и повышением точности и надежности измерения и регистрации с возможностью определения сферических координат объекта из положения «с рук» на местности без прекращения наблюдения за объектом и местностью. Также обеспечивается возможность сохранения цифрового фото и видео изображения с записью времени съемки, координат наблюдателя и координат объекта.
Указанный технический результат достигается тем, что в устройство для измерения сферических координат удаленного объекта, содержащее лазерный дальномер, датчик угла места в корпусе, оптико-электронный прибор, введен коллимирующий модуль, а оптико-электронный прибор выполнен в виде цифрового фотоаппарата и скреплен жестко с коллимирующим модулем, лазерным дальномером и корпусом датчика угла места так, что оптические оси объектива цифрового фотоаппарата и коллимирующего модуля параллельны.
Кроме того, в него введены размещенный в корпусе датчика угла места модуль обработки информации на базе программируемой логической схемы, а в коллимирующий модуль - микродисплей, который подключен к модулю обработки информации.
Кроме того, в него введен приемник GPS/Глонасс, причем лазерный дальномер, приемник GPS/Глонасс и датчик угла места подключены раздельно к входам модуля обработки информации.
Кроме того, коллимирующий модуль может быть выполнен в виде расположенных по ходу светового луча микродисплея в собственной оправе, объектива и двух зеркал, закрепленных в оправе оборачивающей системы, причем оправа оборачивающей системы, объектив и оправа микродисплея жестко соединены между собой.
Для способа определения координат удаленного объекта на местности указанный технический результат достигается тем, что в известном способе, заключающемся в измерении координат наблюдателя, расстояния до объекта, вычислении координат объекта и визуальном их представлении для наблюдателя, в качестве измерителя координат удаленного объекта используют оптико-электронный прибор с возможностью фиксации и обработки данных в микропроцессоре, а при измерении координат наблюдателя автономно контролируют текущее положение прибора наблюдателя относительно местного горизонта и курса с одновременным вычислением координат удаленного объекта в микропроцессоре оптико-электронного прибора и представлением их на электронном изображении удаленного объекта.
Кроме того, измерение координат удаленного объекта производят из одной точки положения наблюдателя, а вычисление координат удаленного объекта осуществляют в соответствии с зависимостями:
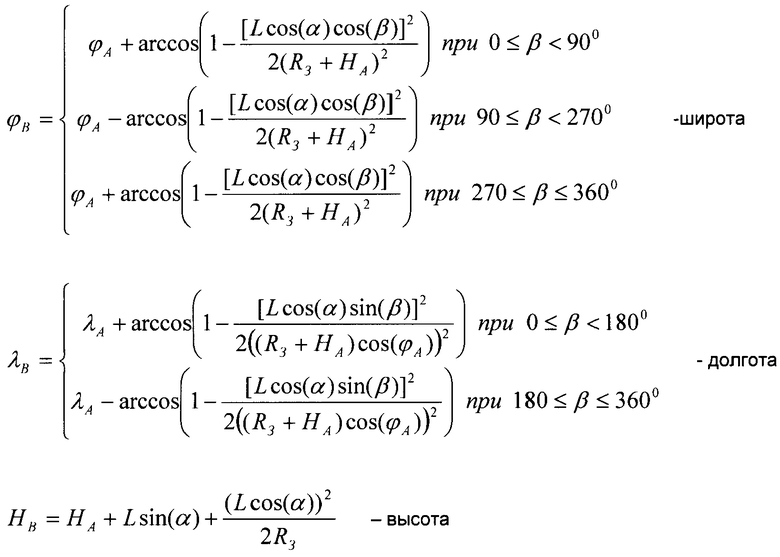
где: φА, λА и НА - соответственно широта, долгота и высота положения прибора наблюдателя,
φВ, λВ и НВ - соответственно широта, долгота и высота удаленного объекта,
α - угол места α,
β - угол между направлением на северный полюс и направлением на объект (угол курса),
L - расстояние от наблюдателя до удаленного объекта,
RЗ=6378.1 км - радиус Земли,
а текущие результаты вычислений фиксируют на электронном изображении удаленного объекта.
Кроме того, при выполнении измерений с трех и более точек изменяют положение наблюдателя относительно удаленного объекта, производят измерение координат удаленного объекта не менее чем с трех точек положения наблюдателя, не лежащих на одной прямой и расположенных на определенном расстоянии друг от друга, обрабатывают информацию о положениях наблюдателя во время съемки - его координат, угла места оптической оси прибора и дальности до объекта, после чего сферические координаты точек положения наблюдателя преобразуют в декартову систему координат, в которой производят вычисление координат удаленного объекта, которые затем преобразуют в сферические координаты и отображают на электронном изображении объекта.
Кроме того, сферические координаты (φ, λ, h) точек положения наблюдателя преобразуют в декартову систему координат в соответствии с зависимостями
а текущие результаты вычислений фиксируют на электронном изображении удаленного объекта.
В случае измерения координат удаленного объекта из одной точки положения наблюдателя угол курса вычисляется по изменению координат наблюдателя при совпадении линии визирования на объект с направлением движения, либо с использованием датчика угла курса.
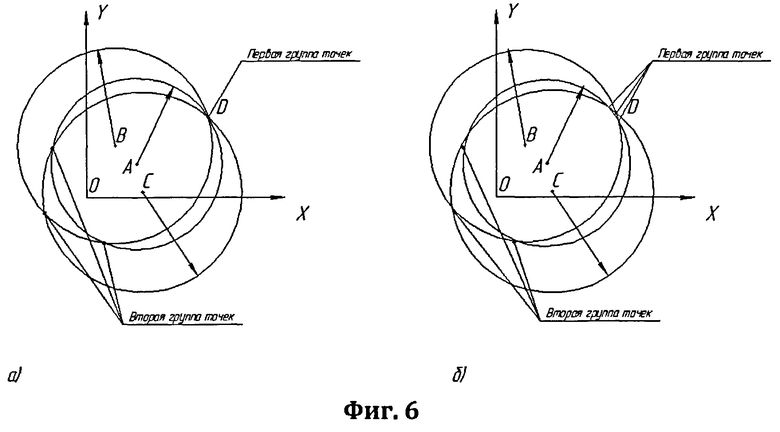
В случае изменения положения наблюдателя относительно удаленного объекта, когда производят измерение координат удаленного объекта не менее чем с трех точек положения наблюдателя, не лежащих на одной прямой и расположенных на определенном расстоянии друг от друга, т.е. в случае подвижного наблюдателя, он удерживает перекрестие прицельной метки дальномера, видимое в видоискателе фотоаппарата на объекте, перемещается и несколько раз регистрирует изображение объекта (производит измерение) с нескольких точек. При каждом измерении дальности до объекта при новом положении наблюдателя становятся известны параметры новой окружности, центром которой является положение наблюдателя, а радиусом - проекция наклонной дальности. Дальше находятся координаты точек пересечения окружностей, если они есть. После проведения трех измерений получаются 6 точек пересечения окружностей (в случае наличия таковых), которые можно разделить на 2 группы. Из двух групп точек выбирается та, в которой расстояния между точками минимально. За координаты объекта принимается среднее значение координат точек пересечения той группы окружностей, в которой расстояние между точками минимально. Далее эти координаты преобразуются в сферическую систему координат и через коллимирующий модуль заводятся в объектив фотоаппарата. При этом для исключения неоднозначности в определении группы точек на характер движения наблюдателя накладываются ограничения - точки съемки не должны лежать на одной прямой и быть расположенными близко друг к другу. Точность определения координат объекта определяется точностью, с которой наблюдатель удерживает перекрестие прицельной метки дальномера на объекте во время съемки.
Расчет курса и позиции объекта осуществляется модулем обработки информации.
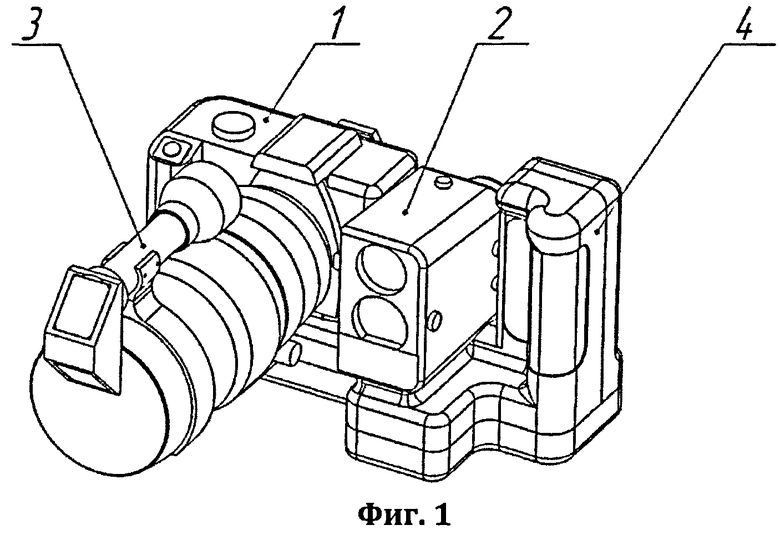
На фиг.1 показан общий вид устройства для вычисления сферических координат удаленного объекта.
На фиг.2 показана функциональная схема устройства для вычисления сферических координат удаленного объекта.
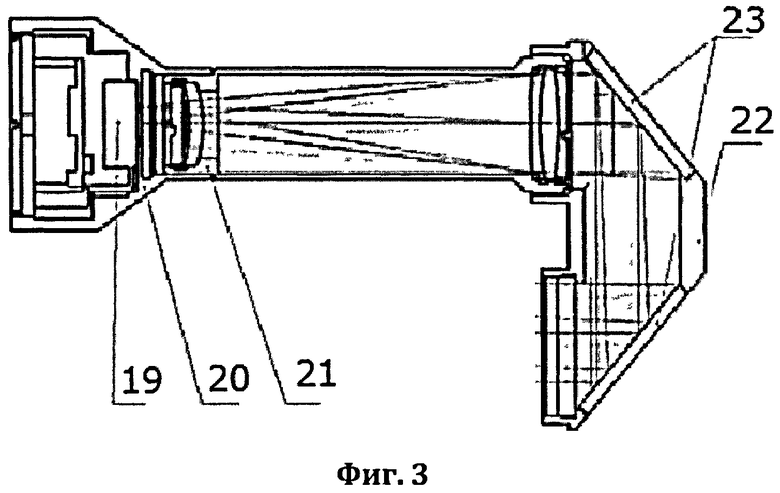
На фиг.3 показан общий вид коллимирующего оптического модуля.
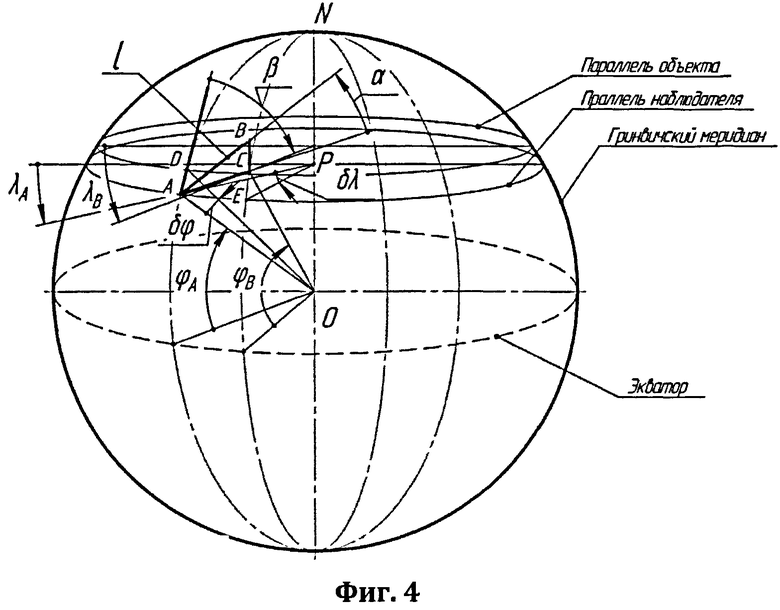
На фиг.4 показана система координат, используемая в устройстве для вычисления сферических координат удаленного объекта.
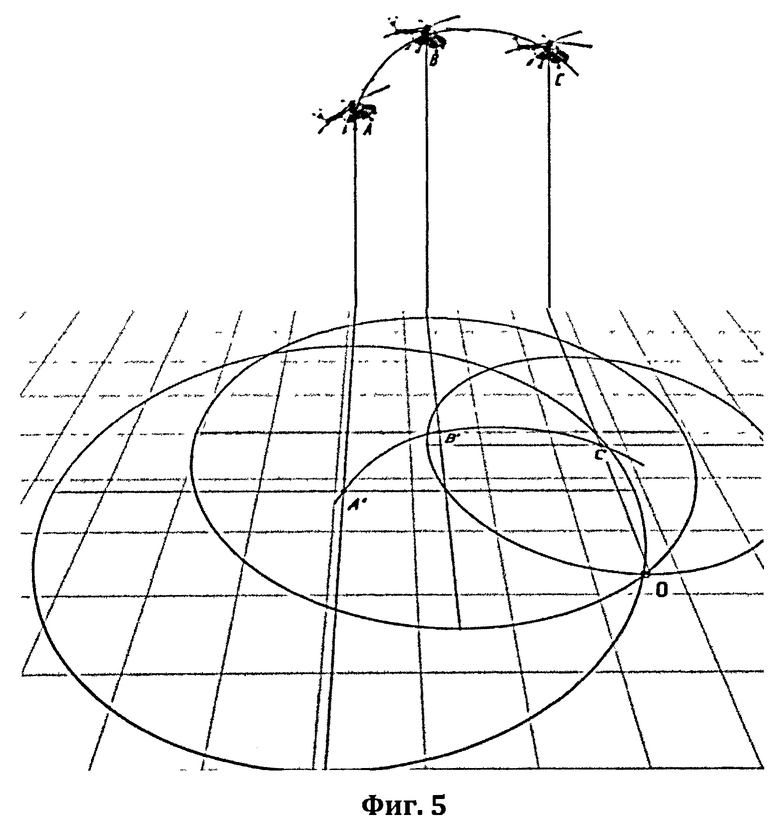
На фиг.5 показана схема определения сферических координат удаленного объекта в случае съемки объекта с нескольких точек.
На фиг.6 показано определение точек пересечение окружностей.
На фиг.1 приведены позиции:
1 - цифровой фотоаппарат;
2 - лазерный дальномер;
3 - коллимирующий оптический модуль;
4 - корпус прибора с модулем обработки информации и датчиком угла места;
На фиг.2 приведено:
5 - модуль обработки информации;
2 - лазерный дальномер с датчиками углов места и курса;
6 - объект наблюдения;
1 - фотоаппарат;
3 - коллимирующий оптический модуль;
7 - разъемы для питания и подачи видеосигнала на коллимирующий модуль;
8 - разъем соединителя активации затвора фотоаппарата;
9 - интерфейс RS232;
10 - датчик угла места на основе НЭМИП с АЭЭ;
11 - датчик угла курса на основе НЭМИП с АЭЭ;
12 - приемник сигналов спутниковой навигации GPS/Глонасс;
13 - антенна приемника сигналов спутниковой навигации GPS/Глонасс;
14 - выключатель питания модуля обработки информации;
15 - переключатель "способ определения координат объекта";
16 - переключатель "режим определения угла курса";
17 - кнопка "Установка 0 азимута/новая серия измерений";
18 - кнопка «Измерить».
Устройство содержит лазерный дальномер 2, жестко связанный с цифровым фотоаппаратом 1. Вверху размещен коллимирующий оптический модуль 3, который осуществляет проецирование координатной информации на матрицу фотоаппарата. Модуль обработки информации 5 считывает данные с дальномера 2 и датчика угла места 10, приемник сигналов спутниковой навигации GPS/Глонасс 12 вычисляет координаты удаленного объекта 6 и формирует видеосигнал для коллимирующего модуля 3 с алфавитно-цифровым представлением информации о положении наблюдателя: географическая широта, географическая долгота, угол места и высота наблюдателя, а также параметры объекта наблюдения: географическая широта, географическая долгота, расстояние до него и время наблюдения. Выбор объекта производится наведением на него перекрестия, фиксацией положения прибора и нажатием на кнопку «Измерение».
Наблюдатель наблюдает изображение объекта 6 на фоне окружающей местности. После того как наблюдатель нажимает на кнопку «Измерить» 18, лазерный дальномер 2 вычисляет расстояние до объекта и передает это расстояние в модуль обработки информации 5. С датчика угла места 10 модулем обработки информации 5 через интерфейс 9 считывается значение угла места оптической оси прибора с датчика угла места 10. Переключатель 16 определяет способ вычисления угла курса - либо с датчика угла курса 11, если он установлен в приборе, либо с приемника GPS/Глонасс. Переключатель 17 определяет способ, с помощью которого определяются координаты объекта - режим однократного измерения, режим нескольких измерений. При начале новой серии измерения наблюдатель нажимает на кнопку 17, а в случае режима однократного измерения нажатие кнопки 17 приводит к заданию текущего угла места и курса, равного 0. Сферические координаты наблюдателя определяются приемником сигналов спутниковой навигации GPS/Глонасс 12, к которому подключается антенна 13. Далее модуль обработки информации рассчитывает сферические координаты объекта и передает их на коллимирующий оптический модуль 3 через разъем 7. После формирования координатной информации коллимирующим оптическим модулем 3 модулем обработки информации 5 в фотоаппарат 1 посылается через разъем 8 сигнал на срабатывание затвора фотоаппарата.
На фиг.3 показан общий вид коллимирующего оптического модуля.
На фиг.3 приведено:
19 - микродисплей;
20 - оправа микродисплея;
21 - объектив;
22 - оправа оборачивающей системы;
23 - зеркала.
На микродисплее 19 формируется изображение с координатной информацией, которое переносится объективом 21 в бесконечность. Далее после отражения от двух зеркал 23, закрепленных в оправе 22, изображение переворачивается. Оправа оборачивающей системы 22, объектив 21 и оправа микродисплея 20 жестко соединены между собой. Жесткая связь коллимирующего модуля с лазерным дальномером и корпусом датчика угла места так, что оптические оси объектива цифрового фотоаппарата и коллимирующего модуля параллельны, обеспечивает повышение точности и надежности измерения и регистрации с возможностью определения сферических координат объекта из положения «с рук» на местности без прекращения наблюдения за объектом и местностью.
Способ определения сферических координат удаленного объекта на местности осуществляется следующим образом.
Измерение координат удаленного объекта на местности в результате однократного измерения практически осуществляется тем, что наблюдатель автономно производит сканирование местности оптико-электронным наблюдательным прибором с контролем и фиксацией в этот момент положения прибора относительно местного горизонта и курса, его координат и расстояния от объекта до наблюдателя, которые поступают в микропроцессор, вычисляются координаты объекта, запоминаются и фиксируются на электронном изображении объекта и индикаторе.
На фиг.4 точкой А обозначено положение наблюдателя, точкой В - положение объекта. Точка С - проекция точки В на параллель объекта, точка Е - проекция точки С на параллель наблюдателя, точка D - проекция точки А на параллель объекта. Направление отсчета углов показано на фиг.4 стрелками.
Пусть известны широта φА, долгота λА и высота НА точки А, расстояние L до точки В, угол курса β (угол между направлением на северный полюс и направлением на объект), угол места α. Поскольку максимальная измеряемая дальность не превышает 10 км, а при расстояниях меньше 10 км, заменяя дуги AC, AD, СЕ, АЕ касательными в точке А, сделаем ошибку, меньшую 1:1000000 длины этой дуги, то для вычисления долготы и широты будем считать, что точки A, E, C, D расположены на плоскости, нормально расположенной к поверхности Земли. При измерении вертикальных расстояний нельзя пренебрегать кривизной Земли даже при небольших горизонтальных расстояниях между точками.
Высота точки В вычисляется по формуле 
Последний член учитывает прогиб Земли 
Приращение широты δφ=φВ-φА определим из треугольника ADO по теореме косинусов
Приращение долготы δλ=λВ-λА определим из треугольника АРЕ по теореме косинусов
В зависимости от диапазона, в который попадает значение магнитного курса β (см. фиг.4), формулы для расчета координат удаленного объекта имеют вид:
Таким образом, выведенные формулы позволяют вычислить координаты удаленного объекта наблюдения при однократном замере расстояния до объекта.
Способ измерения координат удаленного объекта на местности в результате нескольких измерений практически осуществляется тем, что наблюдатель перемещается относительно объекта и производит измерение с нескольких точек - серии измерений, не лежащих на одной прямой и расположенных на определенном расстоянии друг от друга. После проведения трех и более измерений становится возможным определение сферических координат объекта, которые определяются в результате обработки информации о положениях наблюдателя во время съемки - его координат, угла места оптической оси прибора и дальности до объекта. При этом сферические координаты точек измерения преобразуются в декартову систему координат, в которой происходит вычисление координат объекта, которые затем преобразуются в сферические. Вычисленные сферические координаты отображаются на электронном изображении объекта, формируемого фотоаппаратом.
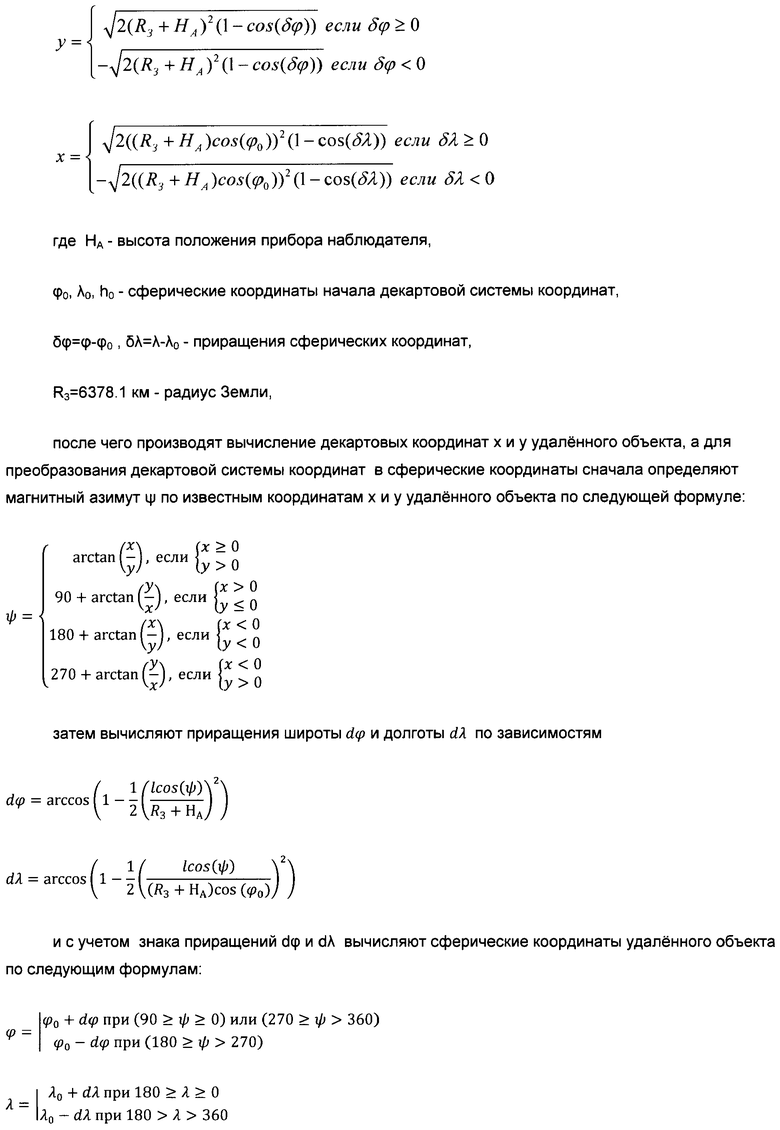
Значение дальности до объекта l и угол места α оптической оси позволяют найти проекцию наклонной дальности на плоскость объекта, являющейся касательной к поверхности. Пусть наблюдатель производит измерения из нескольких точек на определенном участке траектории полета, происходит слежение за объектом, то есть перекрестие удерживается на объекте съемки и производится замер расстояния до объекта. На фиг.5 точки А', В', С' - это проекции точек, в которых производится измерение расстояния до объекта. Величина проекции наклонной дальности вычисляется по формуле lпр=l·cos(α), где α - угол места оптической оси прибора. Как видно из фиг.6, определение координат объекта сводится к нахождению точки, в которой пересекаются окружности, радиусом lпр с центром в точках А', В', С'. Координаты пересечения окружностей легче всего находить в декартовой системе координат, оси которой ориентированы так, что ось х является касательной к параллели и направлена в сторону возрастания долготы, а ось у - касательная к меридиану и направлена в сторону возрастания широты. Высота, на которой расположен объект, может быть найдена сразу по формуле hОб=hнaб+lsin(α), где l - наклонная дальность до объекта, hнаб - высота, на которой расположен наблюдатель. При начале новой серии измерений за начало декартовой системы координат принимается точка текущего расположения наблюдателя. Координаты точек пересечения окружностей будут вычисляться в этой системе координат. При измерении становятся известны навигационные параметры: текущее расположение наблюдателя (сферические координаты, которые преобразуются в декартовы), расстояние до объекта и угол места оси прибора. Пусть сферические координаты начала декартовой системы координат равны (φ0, λ0, h0), а сферические координаты наблюдателя в момент измерения расстояния равны (φ, λ, h). Сферические координаты наблюдателя (центры окружностей) в декартовой системе координат могут быть найдены по формулам:

где δφ=φ-φ0, δλ=λ-λ0 - приращения сферических координат.
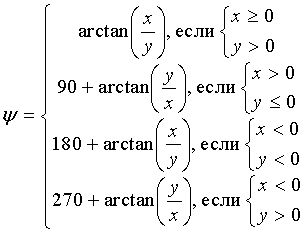
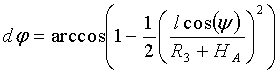
При каждом измерении дальности до объекта при новом положении наблюдателя становятся известны параметры новой окружности. Дальше находятся координаты точек пересечения окружностей, если они есть. Если поступило более двух точек, то необходимо проверить условия однозначности определения группы точек пересечения окружностей. Для этого необходимо найти угол между прямыми, соединяющими 3 точки, не лежащими на одной прямой, и сравнить его с некоторым порогом (10 градусов). Кроме этого, расстояние между точками не должно быть меньше порога, равного 200 метров. Если оба условия выполняются, то можно вычислить координаты объекта как среднее значение точек группы, в которой расположен объект. На этом этапе координаты объекта вычислены в декартовой системе координат, начало которой расположено в точке с географическими координатами λ0, φ0, h. Далее происходит преобразование этих координат в сферические и формирование на микродисплее координатной информации. Далее активизируется затвор фотоаппарата. Во время срабатывания затвора наблюдатель не должен сместить перекрестие прицельной метки дальномера с объекта. Далее рассматривается алгоритм определения точек пересечения окружностей. После проведения 3 измерений получаются 6 точек пересечения окружностей (в случае наличия таковых), которые можно разделить на 2 группы (см. фиг.6). Из двух групп точек выбирается та, в которой расстояния между точками минимально. Преобразование декартовых координат в сферические выполняется в следующей последовательности. Вначале определяется магнитный азимут ψ по известным координатам х и у по следующей формуле:
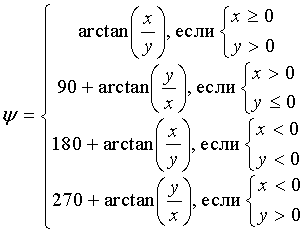
где х, у - декартовы координаты объекта. Далее вычисляются приращения широты и долготы:
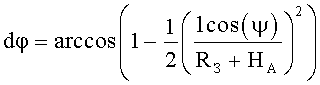
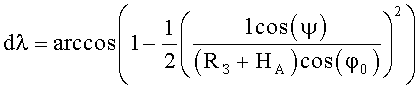
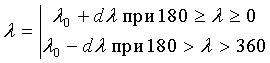
В зависимости от знака приращений dφ и dλ широта и долгота объекта вычисляются по следующим формулам:

Таким образом, обеспечено достижение технического результата изобретений в виде повышения точности и надежности измерения, расширения функциональных возможностей и увеличения быстродействия прибора при обеспечении считывания сферических координат объекта из положения «с рук» без прекращения наблюдения за объектом и местностью. Также обеспечена возможность сохранения цифрового изображения с записью времени съемки, координат наблюдателя, координат объекта, дальности до объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2008 |
|
RU2381447C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ КОНТРОЛЯ СТЕПЕНИ АДАПТАЦИИ СВЕТОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ И КОНТРОЛЬНО-ПРОВЕРОЧНЫЙ ПРИБОР | 2013 |
|
RU2540447C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УКЛОНОВ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2008 |
|
RU2382986C2 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕСА ГРУЗА И КОНТРОЛЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И БОРТОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445586C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПРИБОРНОГО ОБОРУДОВАНИЯ И ТРАНСПАРАНТОВ СВЕТОВОЙ СИГНАЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ НАБЛЮДЕНИИ ИХ ЧЕРЕЗ ПИЛОТАЖНЫЕ ОЧКИ НОЧНОГО ВИДЕНИЯ | 2004 |
|
RU2302023C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИЛИ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2012 |
|
RU2533528C2 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
Устройство содержит лазерный дальномер, датчик угла места в корпусе, оптико-электронный прибор и коллимирующий модуль. Оптико-электронный прибор выполнен в виде цифрового фотоаппарата и скреплен жестко с коллимирующим модулем, лазерным дальномером и корпусом датчика угла места. Оптические оси объектива цифрового фотоаппарата и коллимирующего модуля параллельны. Коллимирующий модуль выполнен в виде расположенных по ходу светового луча микродисплея в собственной оправе, объектива и двух зеркал, закрепленных в оправе оборачивающей системы. Оправа оборачивающей системы, объектив и оправа микродисплея жестко соединены между собой. Технический результат - расширение функциональных возможностей устройства наблюдения и способа его применения с одновременным уменьшением габаритов и повышением точности и надежности измерения и регистрации с возможностью определения сферических координат объекта из положения «с рук» на местности без прекращения наблюдения за объектом и местностью. 2 н. и 3 з.п. ф-лы, 7 ил.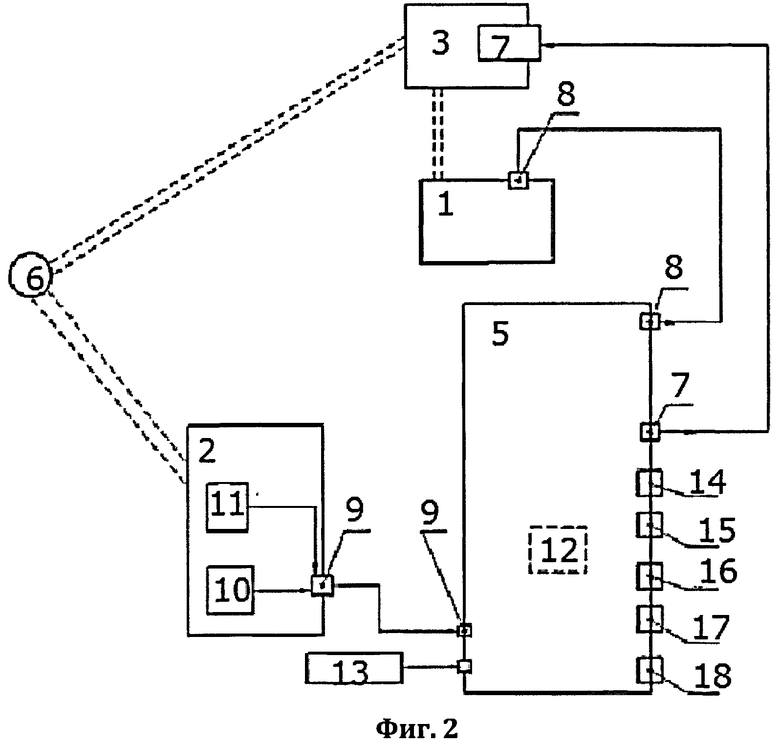
1. Устройство для измерения и регистрации сферических координат удаленного объекта, содержащее лазерный дальномер, датчик угла места в корпусе, оптико-электронный прибор, отличающееся тем, что в него введен коллимирующий модуль, а оптико-электронный прибор выполнен в виде цифрового фотоаппарата и скреплен жестко с коллимирующим модулем, лазерным дальномером и корпусом датчика угла места так, что оптические оси объектива цифрового фотоаппарата и коллимирующего модуля параллельны, а сам коллимирующий модуль выполнен в виде расположенных по ходу светового луча микродисплея в собственной оправе, объектива и двух зеркал, закрепленных в оправе оборачивающей системы, причем оправа оборачивающей системы, объектив и оправа микродисплея жестко соединены между собой.
2. Устройство по п.1, отличающееся тем, что в него введены размещенный в корпусе датчика угла места модуль обработки информации на базе программируемой логической схемы, а в коллимирующий модуль - микродисплей, который подключен к модулю обработки информации.
3. Устройство по п.1, отличающееся тем, что в него введен приемник GPS/Глонасс, причем лазерный дальномер, приемник GPS/Глонасс и датчик угла места подключены раздельно к входам модуля обработки информации.
4. Способ определения сферических координат удаленного объекта на местности, заключающийся в измерении координат наблюдателя, расстояния до объекта, вычислении координат объекта и визуальном их представлении для наблюдателя, использовании в качестве измерителя координат удаленного объекта оптико-электронного прибора с возможностью фиксации и обработки данных в микропроцессоре, автономном контроле при измерении координат наблюдателя текущего положения прибора наблюдателя относительно местного горизонта и курса с одновременным вычислением координат удаленного объекта в микропроцессоре оптико-электронного прибора, отличающийся тем, что производят измерение координат удаленного объекта не менее, чем с трех точек положения наблюдателя, не лежащих на одной прямой и расположенных на определенном расстоянии друг от друга, обрабатывают в микропроцессоре информацию о координатах, угле места оптической оси прибора и дальности до объекта для этих точек положения наблюдателя во время съемки, после чего сферические координаты точек положения наблюдателя преобразуют в декартову систему координат, в которой производят вычисление координат удаленного объекта, которые затем преобразуют в сферические координаты и отображают на электронном изображении объекта.
5. Способ по п.4, отличающийся тем, что сферические координаты (φ, λ, h) точек положения наблюдателя преобразуют в декартову систему координат в соответствии с зависимостями


где НА - высота положения прибора наблюдателя,
φ0, λ0, h0 - сферические координаты начала декартовой системы координат,
δφ=φ-φ0, δλ=λ-λ0 - приращения сферических координат,
R3=6378.1 км - радиус Земли,
после чего производят вычисление декартовых координат х и у удаленного объекта, а для преобразования декартовой системы координат в сферические координаты сначала определяют магнитный азимут ψ по известным координатам х и у удаленного объекта по следующей формуле:
затем вычисляют приращения широты dφ и долготы dλ по зависимостям
и с учетом знака приращений dφ и dλ вычисляют сферические координаты удаленного объекта по следующим формулам:

а текущие результаты вычислений фиксируют на электронном изображении удаленного объекта.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2008 |
|
RU2381447C1 |
| RU 1827136 A3, 10.03.1996 | |||
| US 5331881 А, 26.07.1994 | |||
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |

