Предлагаемое изобретение относится к области радиолокации, к системам автосопровождения объекта визирования (ОВ), к системам самонаведения подвижных носителей (ПН), особенно разового действия, и может быть применено в первичных радиолокационных системах, т.е. в системах, использующих принцип отражения радиоволн, а также в аналогичных системах, в которых длины и тип волн несущественны, и, кроме того, в комплексированных радиолокационных бортовых системах самонаведения (БССН) высокого уровня интеграции, содержащих радиолокационную и инерциальную систему автосопровождения, в составе которых имеется устройство с изменяющейся ориентацией направления зеркала антенны, основанные на использовании первичной информации гироинерциальных датчиков сигналов пространственного движения ПН интегрированных радиолокационных (РЛ) БССН, установленных на нем соответствующим образом.
При создании упомянутых систем важной задачей является обеспечение:
- предельно высокого разрешения БССН в режиме реального времени при поиске объекта визирования (ОВ),
- высокой точности пеленгования облучаемого ОВ и определения координат положения облучаемого ОВ относительно ПН,
- помехозащищенности сигналов компенсации фазовых искажений принимаемых сигналов, обусловленных траекторными нестабильностями (ТН) и упругими колебаниями корпуса (УКК) ПН БССН.
Следовательно, назначением предлагаемого способа и системы для его осуществления является обеспечение:
- коррекции (временной или фазовой) опорного или отраженного (траекторного) сигнала для согласования процедуры цифровой обработки,
- определения положения диаграммы направленности (ДН) антенны БССН относительно облучаемого ОВ и управления ею для одновременного поддержания заданного положения зоны поиска ОВ на местности,
- привязки получаемых координат обнаруженного ОВ (или обнаруженных ОВ) к базовой антенной системы координат.
Известен способ формирования сигналов компенсации фазовых искажений (доплеровского набега фазы) принимаемых сигналов радиолокационными станциями (РЛС), основанный на адаптивной обработке принимаемых сигналов, при котором на основе начальной фазы отраженного от облучаемого ОВ сигнала формируют сигналы, пропорциональные отклонениям фазового центра антенны (или практически центра излучения антенны - ЦИА) РЛС от заданной (опорной) траектории движения носителя РЛС. При этом по каждому зондирующему импульсу оценивается фаза, а также и амплитуда сигнала, отраженного от облучаемого ОВ, и фона, получаемых на выходе фазового детектора преемника РЛС. Данный способ предусматривает использование метода максимального правдоподобия, описанного в книге «Радиолокационные станции обзора земли» Г.С.Кондратенкова, В.А.Потехина, А.П.Реутова, Ю.П.Феоктистова / Под ред. Г.С.Кондратенкова. - М.: Радио и связь, 1983. - 272 с. на стр.223-232. Вследствие этого обеспечивается формирование сигналов, пропорциональных оценке приращений (набега) фазы сигнала, являющихся сигналами компенсации в принимаемом сигнале ТН и УКК носителя РЛС. Этот способ реализуется в условиях существенной неопределенности относительно параметров траекторного движения ЦИА РЛС, т.е. обеспечивает подстройку (адаптацию) при формировании радиолокационного изображения к случайным отклонениям ЦИА РЛС опорной траектории движения носителя РЛС. Кроме того, данный способ позволяет адаптироваться не только к первой производной (т.е. к скорости), но и к высшим производным (т.е. к ускорению) отклонений траекторий ЦИА РЛС. Так как указанные производные приводят к расфокусировке радиолокационного изображения, то способ обеспечивает реализацию автофокусировки радиолокационного изображения.
Кроме известных способов и технических решений, рассмотренных в упомянутой книге, в книге «Радиолокационные станции с цифровым синтезированием апертуры антенны» В.Н.Антипова, В.Т.Горяинова, А.Н.Кулинова, В.Н.Мансурова, А.Г.Охонского, Н.А.Сазонова, М.П.Титова, Е.Ф.Толстова, А.В.Шаповалова / Под ред. В.Т.Горяинова. - М.: Радио и связь, 1988. - 304 с. на стр.162-182 рассматривается также определение параметров опорной функции с помощью информации прицельно-навигационного комплекса ПН и на ее основе формирование компенсации фазовых искажений принимаемого сигнала РЛС с синтезированной апертурой.
Как показывает анализ известных способов, в которых предлагаются алгоритмы измерения ТН и УКК ПН РЛС с синтезированной апертурой (РСА), реализующие, по меньшей мере, три основных блока вычислений и преобразований:
- определение по сигналам гироинерциальных датчиков (гироскопов и акселерометров) традиционной системы инерциальной навигации (ИНС) расчетных параметров радиуса - вектора r в геоцентрической системе координат Сξηξ, связанной с центром Земли (фиг.1);
- переход из геоцентрической Cξ1η1ζ1 в «остановленную» систему координат Фx0y0z0;
- пересчет переменных из системы осей Фx0y0z0 в оценки параметров траекторного сигнала относительно системы координат, жестко связанной с антенной.
Это существенно усложняет систему обработки траекторного сигнала и не позволяет в полной мере решить задачу получения изображения подстилающей поверхности предельно высокого (теоретически возможного) разрешения в реальном времени. Действительная разрешающая способность существующих РСА в несколько, как правило в 3÷5, раз хуже потенциальной.
Известные способы не обеспечивают помехозащищенность сигналов компенсации фазовых искажений в принимаемом сигнале, отраженном от облучаемого ОВ, в условиях внешних активных и пассивных мешающих воздействий, поскольку невозможно определить, от чего происходит искажение фазы сигнала: или от ТН и УКК ПН РЛС, или от внешних мешающих воздействий. При этом не позволяют получить повышенную точность в определении координат положения облучаемого ОВ.
Известны также следующие технические решения
1. Радар с синтезированной апертурой (JP 4245422 В2 8G01S 13/00, 30.06.2003 г.) «содержит датчик 1, излучающий ВЧ импульсный сигнал с последующим приемом отраженного подвижного объекта сигнала; датчик 2 тряски, выдающий информацию о положении, скорости и ускорении подвижного объекта; блок 3 для определения размера изображения синтезированной апертуры, воспроизводимого в момент, когда фазовая ошибка принятого сигнала, обусловленная тряской подвижного объекта, оказывается равной или меньшей заданного значения; блок 4 для воспроизведения и обработки изображения синтезированной апертуры».
2. Способ выбора оптимальной продолжительности интервала синтезирования в радиолокационной станции с инверсным синтезированием апертуры антенны (RU 2378662 C1 G01S 13/90, 02.06.2008 г.), «сущность которого заключается в том, что при работе дискретного фокусирующего фильтра, формирующего оценку изменения текущей дальности до наблюдаемой цели, осуществляется момент появления погрешности, превышающей заданное значение, тем самым позволяя устранить эффект накопления нескомпенсированных фазовых ошибок, исключить возможность формирования расфокусированного изображения, своевременно остановить процесс инверсного синтезирования апертуры антенны».
3. Угловой дискриминатор (RU 2202806 C1 G01S 7/36, 13/44, 13/68 29.05.2002 г.), «сущность которого заключается в том, что он содержит приемопередающую антенну с формирователем суммарного и разностного сигналов, которые образуют антенный блок, к суммарному выходу которого подключены последовательно соединенные антенный переключатель и приемник опорного канала, к разностному выходу подключены последовательно соединенные антенный переключатель и преемник измерительного канала, передатчик, блок автоматической регулировки усиления, вход которого соединен с выходом приемника опорного канала, а выход подключен ко входам регулировки преемников опорного и измерительного каналов, синхронный детектор, входы которого соединены с выходами приемников опорного и измерительного каналов, а выход является выходом сигнала углового рассогласования, направленный ответвитель, включенный между выходом передатчика и вторым входом антенного переключателя, соединенного с суммарным выходом антенного блока, и последовательно соединенные фазовращатель, вход которого подключен ко второму выходу направленного ответвителя, и дополнительная передающая антенна, конструктивно входящая в состав антенного блока и имеющая поляризацию, ортогональную поляризации основной приемопередающей антенны, что обеспечивает пространственный поворот плоскости поляризации результирующего зондирующего сигнала, при этом кросс-поляризационная помеха, ортогональная по поляризации зондирующему сигналу, не будет таковой для основной приемопередающей антенны и поэтому не будет действовать на угловой дискриминатор…».
4. Способ измерения угловых координат объекта и радиолокационная станция для его реализации (RU 2291466 C1 G01S 13/68, 26.05.2005 г.), при котором «излучают зондирующие сигналы, производят прием и обнаружение отраженных от объекта сигналов, осуществляют измерение уровней принятых сигналов и измерение угловых координат луча, соответствующих принятым сигналам, формируют двумерные угловые пакеты принятых сигналов, выполняют анализ двумерного углового пакета принятых сигналов, на основании которого вычисляют угловые координаты объекта».
Рассмотренные технические решения основаны на радиолокационном контакте с ОВ, обеспечивают формирование сигналов пеленгования ОВ на основе обработки принимаемых радиолокационных сигналов, получаемых в результате отражения их от ОВ, облучаемого зондирующими сигналами. Выделение сигналов пеленгования ОВ не может быть в рассмотренных технических решения осуществлено при отсутствии радиолокационного контакта с OB.
Таким образом, ни один из рассмотренных аналогов не является близким по технической сущности и не может быть принят в качестве прототипа предлагаемых технических решений.
Целью заявляемых технических решение (способа и системы для его осуществления) является обеспечение с повышенной точностью, помехоустойчивостью и помехозащищенностью формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, с одновременным его инерциальным пеленгованием и инерциальным автосопровождением.
Сущность изобретения заключается в том, что по предлагаемому способу в предстартовом положении ПН БССН по первоначально определенным и заданным сигналам, пропорциональным начальным значениям угла наклона 

- проекции 


- декартовых координат ξ0(D0), η0(Н0), ζ0 ПН в местной горизонтальной системе координат Оξηζ (фиг.1);
- долготы λ0 и географической широты 
- углов рыскания ψ0, тангажа θ0, крена γ0 ПН,
создают информационный массив начального назначения координат ОВ.
Для этого формируют сигналы, пропорциональные начальным значениям:
- проекций 


- углов 

- параметров 

- направляющих косинусов 
В момент старта ПН обновление сигналов начальной информации прекращают, а после старта во время его движения по траектории формируют сигналы, пропорциональные измеренным текущим значениям проекций nx, ny, nz вектора n кажущегося линейного ускорения движения и проекций ωх, ωy, ωz вектора ω абсолютной угловой скорости поворота вектора визирования на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам с учетом сигналов, определенных и установленных во время предстартовой подготовки ПН, формируют сигнал, пропорциональный рассогласованию между текущим значением наклонной дальности L сближения ПН с заданным ОВ и начальным значением наклонной дальности L0 до заданного ОВ в момент старта ПН. По этому сигналу осуществляют автосопровождение ОВ по дальности. Одновременно из полученных сигналов измеренной текущей информации пространственного движения вектора визирования и сигналов начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования соответственно в базовой антенной системе координат, т.е. выполняют инерциальное пеленгование заданного ОВ, по которым осуществляют инерциальное автосопровождение ОВ по направлению.
При достижении значения наклонной дальности сближения ПН с ОВ, равной величине наклонной дальности локационного контакта с облучаемым ОВ, одновременно с инерциальным пеленгованием и инерциальным автосопровождением заданного ОВ в момент времени tок начала формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, обусловленных ТН и УКК ПН, формируют по полученным сигналам инерциального пеленгования и инерциального автосопровождения заданного ОВ сигналы, пропорциональные начальным значениям параметров движения апертуры ИАУ относительно заданного ОВ, т.е.:
- проекций Vx0, Vy0, Vz0 вектора V скорости сближения с заданным ОВ на оси базовой антенной системы координат Ox0y0z0;
- наклонной дальности L0 сближения ПН с заданным ОВ;
- направляющих косинусов lx0, ly0, lz0, характеризуемых сигналами e10, и е20 пеленгования заданного ОВ в базовой антенной системе координат Ox0y0z0, определяющими положение вектора визирования в данной системе координат.
По полученным сигналам начальной выставки параметров движения апертуры ИАУ, а также по сигналам, пропорциональным измеренным проекциям nx, ny, nz вектора n кажущегося линейного ускорения и проекциям ωx, ωy, ωz вектора ω абсолютной угловой скорости ЦИА на соответствующие оси базовой антенной системы координат Oxyz, формируют с учетом линейного смещения центра пересечения направлений осей чувствительности гироинерциальных датчиков первичной информации пространственного движения ЦИА, установленных соответствующим образом во внутренней рамке двухосного карданова подвеса зеркала ИАУ, сигналы, пропорциональные параметрам ТН и УКК ПН, влияющих на пространственное положение ЦИА относительно облучаемого ОВ. При этом формируют сигналы, пропорциональные параметрам пространственного движения апертуры антенны относительно облучаемого ОВ, т.е. параметрам траекторного сигнала, характеризуемым сигналами е1 и e2 пеленгования облучаемого ОВ в системе координат, смещенной относительно базовой антенной системы координат Oxyz.
В момент времени tок начала каждого дискретного интервала измерения в режиме поиска ОВ формируют в стабилизированной («остановленной») системе координат Фx0y0z0 сигналы, пропорциональные начальным значениям радиальной скорости 

Сущность предлагаемого изобретения заключается также и в том, что система, осуществляющая способ по п.1, состоит из узкополосного контура инерциального автосопровождения заданного ОВ и широкополосного контура гиростабилизации и управления направлением вектора визирования. При этом система содержит инерциальный дискриминатор сигналов пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, который включает в свой состав цифровое вычислительное устройство (ЦВУ) и ИАУ. ИАУ содержит зеркало с облучателем и волноводно-коммутирующее устройство (ВКУ), двухосный карданов подвес, ось поворота наружной рамки которого установлена на основании ИАУ, а ось поворота внутренней рамки установлена в наружной рамке перпендикулярно к ее оси поворота. Кроме того, ИАУ имеет в своем составе электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчики сигнала поворота наружной и внутренней рамок соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик сигнала угловой скорости, три однокомпонентных акселерометра. Причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса зеркала ИАУ так, что направление кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования ИАУ. Гироскоп содержит трехосный карданов подвес ротора, датчик сигнала угла прецессии внутренней рамки трехосного карданова подвеса ротора гироскопа и датчик сигнала угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. Ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в корпусе гироскопа, который жестко закреплен во внутренней рамке двуосного карданова подвеса зеркала ИАУ. ИАУ включает в свой состав электронный узел гиростабилизации и управления направлением зеркала на ОВ по углу наклона, электронный узел гиростабилизации и управления направлением зеркала на ОВ по азимуту, а также усилители сигнала обратной связи в соответствующих каналах двухканального гироскопического датчика сигнала угловой скорости (ДУС). ДУС установлен во внутренней рамке двухосного карданова подвеса зеркала ИАУ так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования ИАУ, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси поворота внутренней рамки двухосного карданова подвеса зеркала ИАУ. При этом направление кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси поворота наружной рамки двухосного карданова подвеса зеркала ИАУ. Все три акселерометра установлены во внутренней рамке двухосного карданова подвеса зеркала ИАУ так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных акселерометров. Причем ось чувствительности одного из трех однокомпонентных акселерометров совпадает в заарретированном положении с нулевым направлением линии визирования ИАУ. Выходы соответствующих датчиков угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора гироскопа соединены с входом соответствующих узлов гиростабилизации и управления направлением зеркала ИАУ на заданный ОВ по углу наклона и по азимуту. Выходы этих узлов соединены соответственно с электродвигателями поворота наружной и внутренней рамок двухосного карданова подвеса зеркала ИАУ. При этом выходы датчиков сигнала угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического ДУС соединены соответственно с входом усилителей обратной связи. Их выходы соединены с датчиками сигнала момента внутренней и наружной рамок двухканального гироскопического ДУС. Зеркало ИАУ выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно облучателя, жестко закрепленного на основании ИАУ. При этом зеркало шарнирно соединено тягами механического координатора ИАУ соответственно с наружной и с внутренней рамкой двухосного карданова подвеса зеркала ИАУ так, что расстояние между каждым из шарниров на задней поверхности зеркала и его центром поворота равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса зеркала ИАУ и центром поворота этих рамок. ИАУ включает в свой состав также электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, и, кроме того, электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикально плоскости, соединенного с входом датчика сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, причем сигнал, снимаемый с выхода узла масштабирования сигнала, поступающего с выхода электронного узла формирования управляющего сигнала угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала ИАУ на поперечную ось системы координат, связанной с зеркалом. Выход электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, соединен с входом датчика сигнала момента управления направлением внутренней рамки трехосного карданова подвеса ротора гироскопа. Выходы трех однокомпонентных акселерометров соединены соответственно с первым, вторым и третьим входами ЦВУ, выходы двухканального гироскопического датчика сигнала угловой скорости и выход электронного узла масштабирования соединены с четвертым, пятым и шестым входами ЦВУ соответственно. Выход датчика сигнала угла поворота наружной рамки и выход датчика сигнала угла поворота внутренней рамки двухосного карданова подвеса зеркала ИАУ соединены с седьмым и восьмым входами ЦВУ соответственно. Первый и второй выходы ЦВУ соединены соответственно с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости и с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости. Информационный девятый вход ЦВУ соединен информационной линией связи с аппаратурой формирования штатного массива сигналов координат начального определения и установления заданного ОВ и начальной выставки инерциального пеленгования заданного ОВ, внешней по отношению к заявляемой системе. Информационный третий выход цифрового вычислительного устройства соединен информационной линией связи с аппаратурой формирования сигналов управления подвижного носителя, внешней по отношению к заявляемой системе. Четвертый выход ЦВУ соединен информационной линией связи с входом приемника сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, внешнего по отношению к заявляемому техническому решению, где осуществляется указанная компенсация.
Введение указанных признаков в способ и в систему для его осуществления обеспечивает решение задачи формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, с одновременным его инерциальным пеленгованием и инерциальным автосопровождением. При этом обеспечивается предельно высокая разрешающая способность БССН в реальном времени при поиске ОВ, высокая точность пеленгования облучаемого ОВ и определения его координат относительно ПН, высокая помехозащищенность и точность сигнала компенсации фазовых искажений принимаемых сигналов, обусловленных ТН и УКК ПН БССН.
Из уровня техники не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, с одновременным его инерциальным пеленгованием и инерциальным автосопровождением. Поэтому можно считать, что предложенные технические решения соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
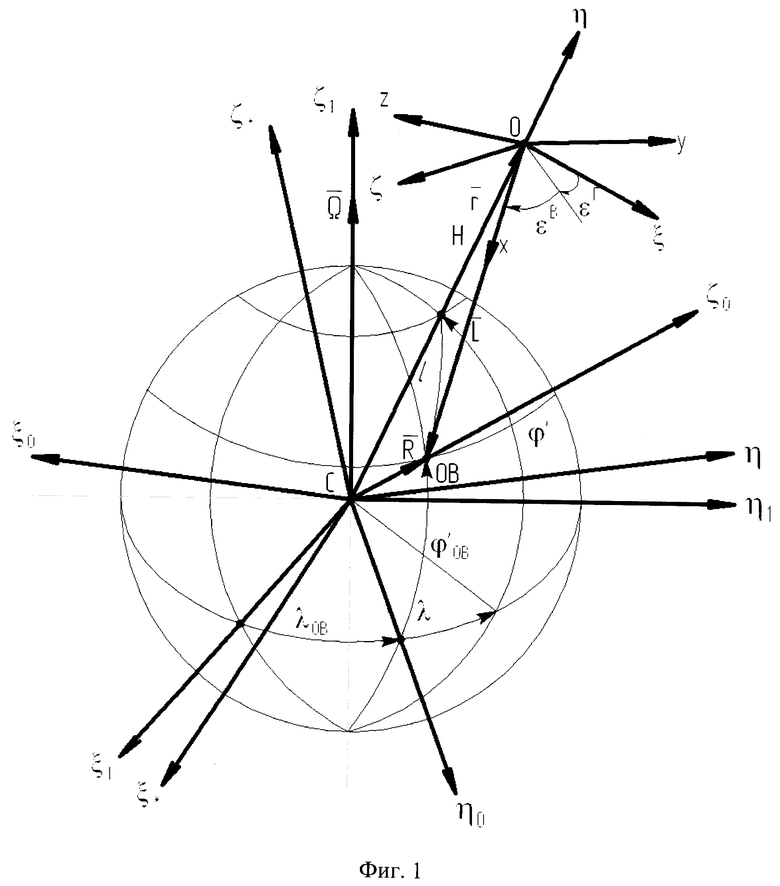
- на фиг.1 - принятые системы координат;
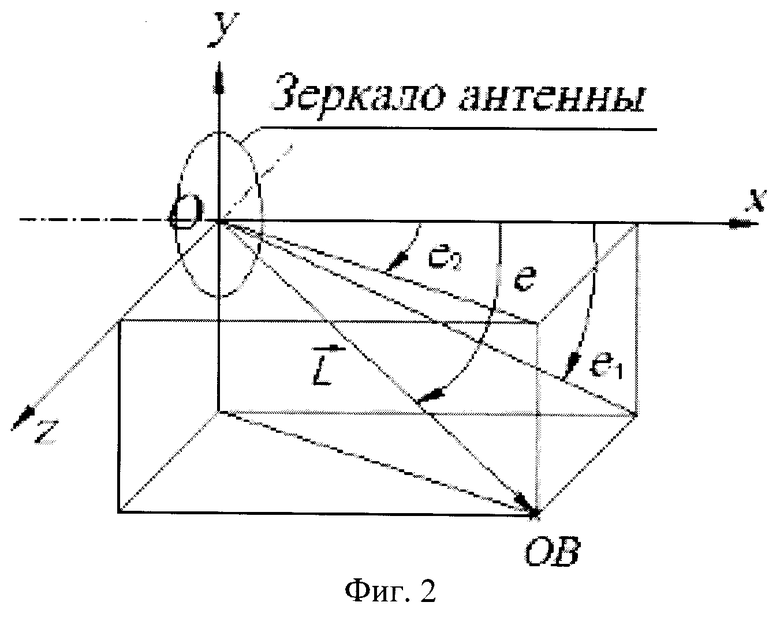
- на фиг.2 - положение вектора L визирования заданного ОВ в базовой системе координат Oxyz;
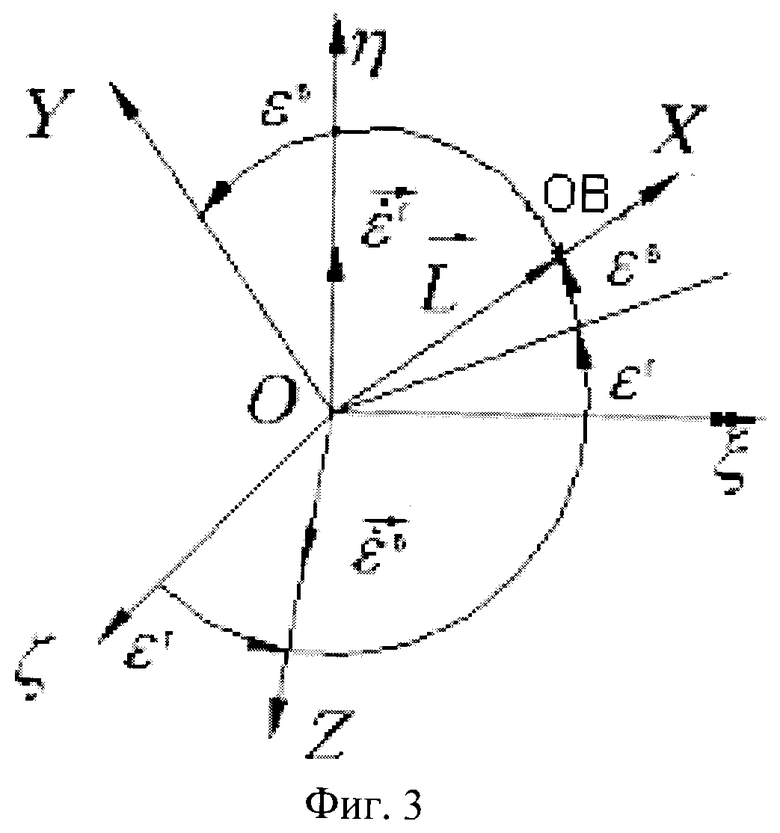
- на фиг.3 - взаимное положение базовой антенной системы координат Oxyz и местной горизонтальной системы координат Оξηζ;
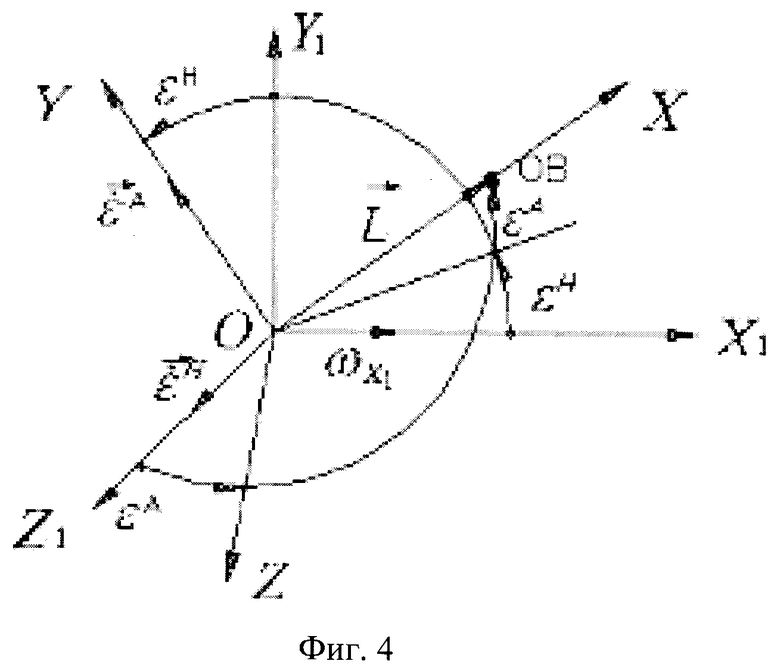
- на фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной с ПН системы координат Ox1y1z1;
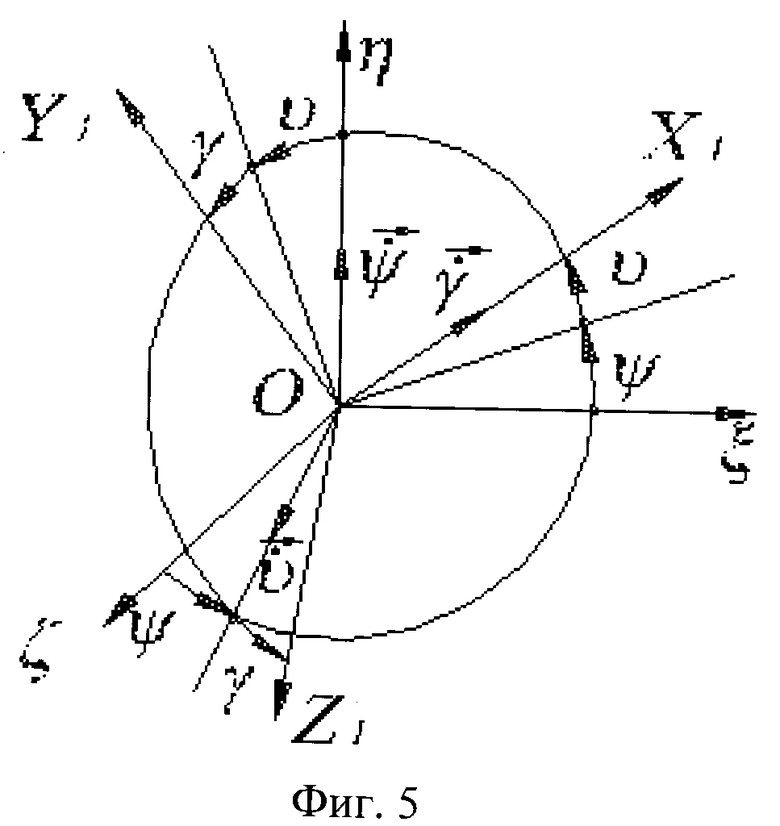
- на фиг.5 - взаимное положение связанной с ПН системы координат Ox1y1z1 и местной горизонтальной системы координат Oξηζ;
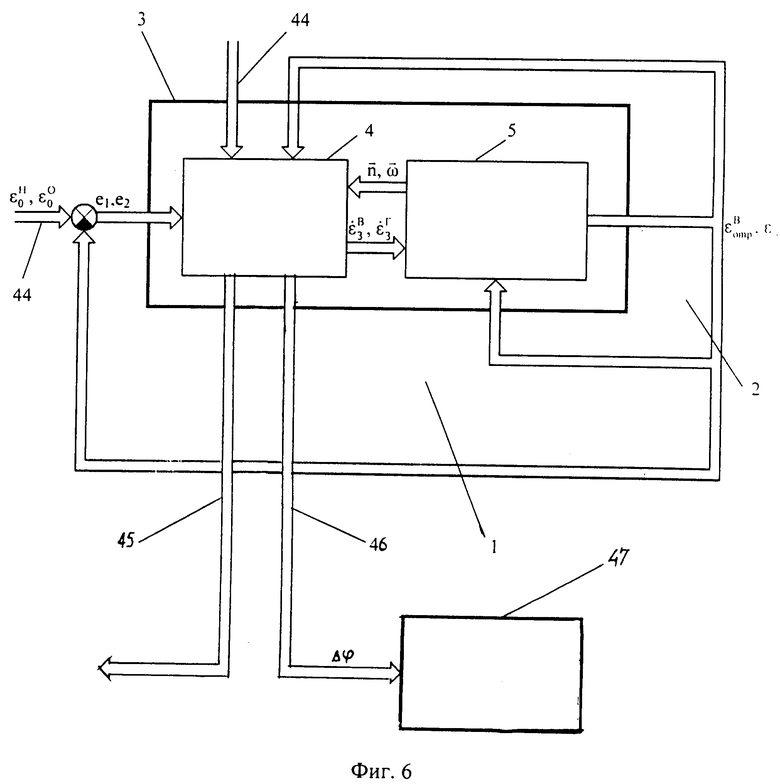
- на фиг.6 - структурная схема инерциального дискриминатора сигналов пеленгования заданного ОВ;
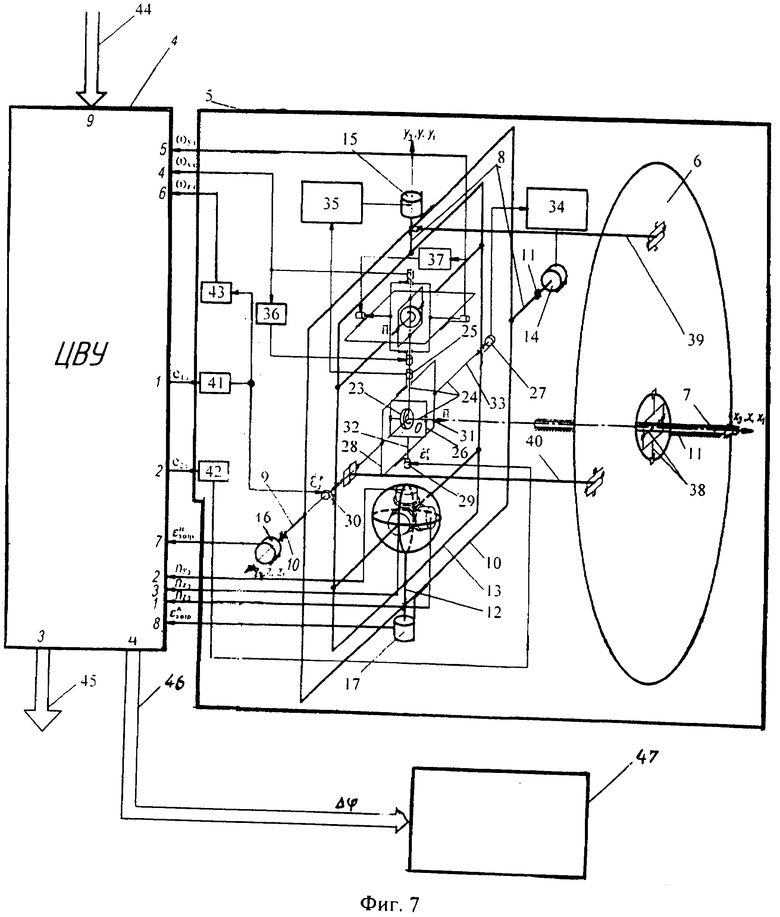
- на фиг.7 - функционально-структурная схема системы инерциального автосопровождения заданного ОВ;
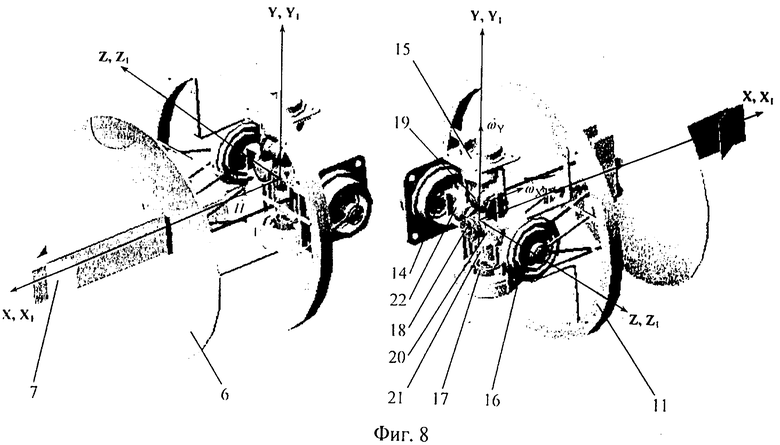
- на фиг.8 - принципиальная кинематическая схема ИАУ инерциального дискриминатора сигналов пеленгования заданного ОВ;
- на фиг.9 - пространственное расположение вектора С с началом в точке Д смещения относительно ЦИА при отсутствии УКК ПН.
Предлагаемый способ характеризуется тем, что в предстартовом положении ПН БССН по первоначально определенным и заданным сигналам, пропорциональным начальным значениям угла наклона 

- проекций 


- декартовых координат ξ0(D0), η0(H0), ζ0 ПН в местной горизонтальной системе координат Oξηζ;
- долготы λ0 и географической широты 
- углов рыскания ψ0, тангажа υ0, крена γ0 ПН,
создают информационный массив начального назначения ОВ и начальной выставки инерциального пеленгования заданного ОВ, для чего формируют сигналы, пропорциональные начальным значениям:
- проекций 


- углов 

- параметров е1, е2 инерциального пеленгования ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе коодинат Oxyz (фиг.1, фиг.2);
- направляющих косинусов 
В момент старта ПН обновление сигналов начальной информации прекращают. После старта во время движения ПН по траектории формируют сигналы, пропорциональные измеренным текущим значениям проекций nx, ny, nz вектора n кажущегося линейного ускорения движения и проекций ωx, ωy, ωz вектора ω абсолютной угловой скорости поворота вектора визирования ОВ на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам текущих значений проекций вектора n кажущегося линейного ускорения движения и проекций вектора ω абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке ПН,:
- определяют сигнал, пропорциональный рассогласованию ΔL между текущим значением наклонной дальности L сближения ПН с заданным ОВ и начальным значением наклонной дальности L0 до заданного ОВ в момент старта ПН,
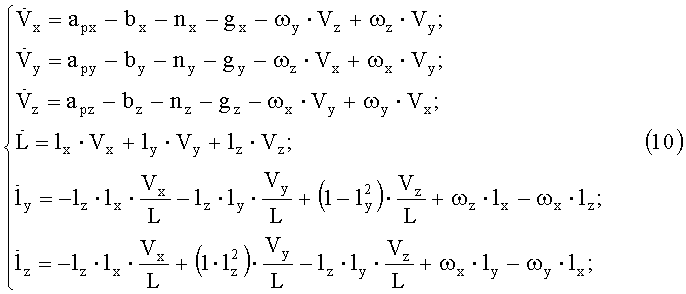
- выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров e1, е2 инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования соответственно в базовой антенной системе координат Oxyz согласно следующему алгоритму:
где

При этом общий алгоритм решения данной задачи представляет собой систему дифференциальных уравнений первого порядка в векторной форме:

причем дифференцирование производится в инерциальной системе координат Сξ*η*ζ* (фиг.1.), где для случая визирования неподвижного ОВ радиус-вектор 

причем

где µ - произведение массы Земли на гравитационную постоянную;
ε=ε(ξ1,η1,ζ1) - составляющая силовой функции поля тяготения Земли, характеризующая ее малое отклонение от сферической формы; ξ1, η1, ζ1 - проекции радиуса - вектора 

при этом

При достижении значения наклонной дальности сближения ПН с ОВ, равной величине наклонной дальности локационного контакта с облучаемым ОВ, одновременно с инерциальным пеленгованием и инерциальным автосопровождением заданного ОВ в момент времени tок начала формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, обусловленных ТН и УКК ПН, формируют по полученным сигналам инерциального пеленгования и инерциального автосопровождения заданного ОВ сигналы, пропорциональные начальным значениям параметров движения апертуры ИАУ относительно заданного ОВ, т.е.:
- проекций Vx0, Vy0, Vz0 вектора V скорости сближения ПН с заданным ОВ на оси базовой антенной системы координат Ox0y0z0;
- наклонной дальности L0 сближения ПН с заданным ОВ;
- направляющих косинусов lx0, ly0, lz0, характеризуемых сигналами 


По полученным сигналам начальной выставки параметров движения апертуры ИАУ, а также по сигналам, пропорциональным измеренным проекциям nX, nY, nZ вектора n кажущегося линейного ускорения и проекциям ωX ωу, ωz вектора ω абсолютной угловой скорости ЦИА на соответствующие оси базовой антенной системы координат Oxyz, формируют с учетом пространственного расположения линейного смещения с относительно ЦИА пересечения осей чувствительности гироинерциальных датчиков первичной информации пространственного движения апертуры ИАУ сигналы, пропорциональные параметрам ТН и УКК ПН, влияющих на пространственное положение ЦИА относительно облучаемого ОВ, согласно алгоритму:
где

причем, так как составляющая ускорений, вызванная смещением (вектор с) ЦИА относительно точки Д (фиг.9), есть вектор b=d2c/dt2, то

и, следовательно,

Одновременно формируют сигналы, пропорциональные параметрам движения апертуры антенны относительно облучаемого ОВ, которые являются параметрами траекторного сигнала, характеризуемыми сигналами пеленгования облучаемого ОВ в системе координат, смещенной относительно базовой антенной системы координат. В момент времени tок начала каждого дискретного интервала измерения в режиме поиска ОВ формируют в стабилизированной («остановленной») системе координат Фх0y0z0 необходимые для определения опорной функции сигналы, пропорциональные начальным значениям радиальной скорости 



По полученным сигналам формируют сигнал, пропорциональный фазе опорной функции в соответствии с алгоритмом:

и затем формируют сигнал, пропорциональный фазовой поправке Δφ для компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, вызванных ТН и УКК ПН согласно алгоритму:

где λ - длина волны электромагнитных СВЧ-сигналов, излучаемых ИАУ, которые создают случайные пространственные движения ЦИА, т.е. апертуры антенны относительно облучаемой земной поверхности (элемента поверхности, ОВ). Далее сформированным сигналом фазовой поправки Δφ, подаваемым на вход приемника, внешнего по отношению к заявляемому техническому решению, осуществляют компенсацию фазовых искажений принимаемых сигналов, обусловленных ТН и УКК ПН.
Предлагаем система, осуществляющая способ по п.1 (фиг.7), состоит из узкополосного контура 1 инерциального автосопровождения заданного ОВ и широкополосного контура 2 гиростабилизации и управления направлением вектора визирования. При этом система содержит инерциальный дискриминатор 3 сигналов пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz, который включает в свой состав ЦВУ 4 и ИАУ 5. ИАУ содержит зеркало 6 с облучателем 7 и волноводно-коммутирующее устройство (ВКУ), не показанное на фиг.7, двухосный карданов подвес 8, ось 9 поворота наружной рамки 10 которого установлена на основании 11 ИАУ 5, а ось 12 поворота внутренней рамки 13 установлена в наружной рамке 10 перпендикулярно к ее оси 9 поворота. Кроме того, ИАУ 5 имеет в своем составе электродвигатель 14 поворота наружной рамки 10 двухосного карданова подвеса 8 и электродвигатель 15 поворота внутренней рамки 13 двухосного карданова подвеса 8, датчики 16 и 17 сигнала поворота наружной и внутренней рамок 10 и 13 соответственно по углу наклона 








Работа предлагаемого технического решения осуществляется следующим образом.
ЦВУ 4 обеспечивает хранение информационного массива сигналов, введенного от внешнего источника информации по информационной линии связи 44, т.е. начальных значений сферических координат взаимного положения ПН в предстартовом положении и заданного ОВ, сигналов начальных условий выставки инерциального измерения параметров вектора визирования заданного ОВ в местной горизонтальной системе координат Oξηξ, и преобразование последних в базовую антенную систему координат Oxyz. Кроме того, программное обеспечение ЦВУ 4 обеспечивает получение информации о сигналах углового рассогласования, пропорциональных параметрам e1 и е2 инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования xOz и xOy соответственно в базовой антенной системе координат Oxyz, начального значения наклонной дальности L0 до заданного ОВ и текущего значения наклонной дальности L сближения ПН с заданным ОВ и об их разнице (рассогласовании) ΔL, для осуществления инерциального автосопровождения заданного ОВ по направлению и по дальности.
При перемещении после старта ПН и сближения его с заданным ОВ по сигналам гироинерциальных датчиков 18, 19, 20, 21, 22, пропорциональным проекциям nX, nY, nZ вектора n кажущегося линейного ускорения движения и проекций ωX, ωY, ωZ вектора о абсолютной угловой скорости поворота вектора визирования заданного ОВ на оси базовой антенной системы координат Oxyz, при заданных начальных координатах взаимного положения ПН в предстартовом положении и заданного ОВ, а также при заданных начальных условиях выставки его инерциального пеленгования на выходе ЦВУ 4 инерциального дискриминатора 3 формируются сигналы углового рассогласования (ошибки), пропорциональные текущим значениям параметров e1 и е2 инерциального пеленгования заданного ОВ в базовой антенной системе координат Oxyz, и сигнал рассогласования (ошибки) ΔL по дальности, по которым осуществляется инерциальное автосопровождение заданного ОВ.
При достижении значения наклонной дальности сближения ПН с ОВ, равной величине наклонной дальности локационного контакта с облучаемым ОВ, одновременно с инерциальным пеленгованием и инерциальным автосопровождением заданного ОВ в момент времени tок начала формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, обусловленных ТН и УКК ПН, в ЦВУ 4 формируются по полученным сигналам инерциального пеленгования и инерциального автосопровождения заданного ОВ сигналы, пропорциональные начальным значениям параметров движения апертуры ИАУ 5 относительно заданного ОВ. По полученным сигналам начальной выставки параметров движения апертуры ИАУ 5, а также по сигналам, пропорциональным текущим значения измеренных гироинерциальными датчиками 17, 18, 19, 20, 21 первичной информации пространственного движения ЦИА соответственно проекций nX, nY, nZ вектора n кажущегося линейного ускорения движения и проекций ωX, ωy, ωz вектора ω абсолютной угловой скорости ЦИА на соответствующие оси базовой антенной системы координат Oxyz, формируются (с учетом пространственного расположения линейного смещения с центра пересечения осей чувствительности гироинерциальных датчиков 17, 18, 19, 20, 21 относительно ЦИА, установленных соответствующим образом во внутренней рамке 13 двухосного карданова подвеса 8 зеркала 6 ИАУ 5,) сигналы, пропорциональные параметрам L, ly, lz ТН и УКК ПН, влияющих на пространственное положение ЦИА относительно облучаемого ОВ, а также сигналы, пропорциональные параметрам движения апертуры ИАУ 5 относительно облучаемого ОВ, которые являются параметрами траекторного сигнала. Параметры траекторного сигнала характеризуются сигналами e1 и е2 пеленгования облучаемого ОВ в системе координат, смещенной относительно базовой антенной системы координат (фиг.9). В момент времени tок начала каждого дискретного интервала измерения в режиме поиска ОВ в ЦВУ 4 формируются в стабилизированной («остановленной») системе координат Фх0y0z0 сигналы, пропорциональные начальным значениям радиальной скорости 

Следовательно, особенности предлагаемых технических решений состоят в следующем:
- использование в БССН инерциального пеленгования ОВ измерение параметров пространственного движения ЦИА относительно облучаемого ОВ, расположенного на земной поверхности, позволяет по сигналам акселерометров и гироприборов, связанных с апертурой антенны, счислять параметры пеленгования ОВ, согласованные с параметрами траекторного сигнала, и по полученной информации формируют сигнал, пропорциональный фазе опорной функции, и сигнал, пропорциональный фазовой поправке для компенсации фазовых искажений принимаемого сигнала, отраженного от визируемого ОВ;
- разработанные на базе инерциального пеленгования ОВ алгоритмы позволяют определять одновременно параметры инерциального пеленгования ОВ в базовой антенной системе координат и параметры пространственного движения ЦИА в смещенной системе координат, т.е. при размещении гироинерциальных датчиков во внутренней рамке двухосного карданова подвеса зеркала ИАУ в БССН на некотором расстоянии (менее 20 см) относительно ЦИА; при этом дополнительные требования к ЦВУ 4 БССН не предъявляются.
Проведенные исследования показывают, что:
- использование в БССН инерциального измерения параметров пространственного движения ЦИА на основе инерциального пеленгования ОВ позволяет реализовать эффективные инвариантные к параметрам движения ПН схемы комплексирования сигналов пеленгования ОВ инерциального и радиолокационных дискриминаторов, которые обеспечивают, с одной стороны, получение точных оценок отклонений ЦИА по азимуту и по направлению вектора (линии) визирования ОВ и, с другой стороны, формирование в процессе измерения оптимальных оценок параметров, характеризующих рассеяние элементов поверхности в зоне поиска ОВ, с их точной привязкой в системе координат Cξ1η1ζ1 или в базовой антенной системе координат Фхyz (фиг.9);
- при этом обеспечивается асимптотическая устойчивость к начальным возмущениям оценок искомых параметров пространственного движения ЦИА и к инструментальным ошибкам их инерциального измерения и контуров радиолокационного автосопровождения ОВ;
- при комплексировании сигналов пеленгования ОВ инерциального и радиолокационных дискриминаторов обеспечивается предельно широкая полоса пропускания по полезному сигналу, ограниченная практически только частотой обмена информацией по линии информационного обмена в ЦВУ между блоками реализованных алгоритмов измерения параметров пространственного движения ЦИА на основе сигналов пеленгования ОВ, формируемых инерциальным дискриминатором и радиолокационными дискриминаторами в комплексированной системе;
- благодаря узкой, примерно (10-3÷10-4) Гц, полосе пропускания по сигналу ошибок обеспечивается повышенная помехозащищенность и помехоустойчивость комплексированной системы автосопровождения ОВ, поскольку в системе запоминаются во время отсутствия радиолокационного контакта с земной поверхностью не только значения сигналов коррекции от контура радиолокационного автосопровождения ОВ, но и значения их производных, т.е. в системе реализуется алгоритмический контур с астатизмом 1-го порядка;
- предлагаемые технические решения при радиолокационном поиске ОВ, расположенном на земной поверхности, до захвата его на автосопровождение позволяют совмещать функции инерциального измерения параметров пространственных траекторных флюктуаций ЦИА с функциями информационного обеспечения формирования сигналов автономного (инерциального) самонаведения ПН на заданный ОВ;
- предлагаемые технические решения обеспечивают достижение:
- предельно высокого разрешения (до 0,25λ, где λ - длина волны излучаемых зондирующих сигналов) БССН в режиме реального времени при радиолокационном поиске ОВ,
- высокой точности пеленгования облучаемого ОВ и определения координат положения ОВ относительно ПН,
- абсолютной помехозащищенности сигнала компенсации фазовых искажений принимаемых сигналов, обусловленных ТН и УКК ПН, за счет использования при его формировании первичной автономной информации пространственного движения ЦИА, выдаваемой гироинерциальными датчиками, установленными соответствующим образом во внутренней рамке двухосного карданова подвеса зеркала ИАУ БССН.
Изобретение относится к области радиолокации, к системам автосопровождения объекта визирования (ОВ), к системам самонаведения подвижных носитетелей (ПН), особенно разового действия, и может быть применено в первичных радиолокационных системах, т.е. в системах, использующих принцип отражения радиоволн, а также в аналогичных системах, в которых длины и тип волн несущественны, и, кроме того, в комплексированных радиолокационных бортовых системах самонаведения (БССН) высокого уровня интеграции, содержащих радиолокационную и инерциальную системы автосопровождения, в составе которых имеется устройство с изменяющейся ориентацией направления зеркала антенны, основанные на использовании первичной информации гироинерциальных датчиков пространственного движения ПН интегрированных радиолокационных (РЛ) БССН, установленных на нем соответствующим образом. Техническим результатом изобретения является обеспечение высокого разрешения БССН в режиме реального времени при поиске ОВ, высокой точности пеленгования облучаемого ОВ и определения координат положения облучаемого ОВ относительно ПН, высокой помехозащищенности сигналов компенсации фазовых искажений принимаемых сигналов, обусловленных траекторными нестабильностями (ТН) и упругими колебаниями корпуса (УКК) ПН БССН. Предложены способ и система формирования сигнала пеленгования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, с одновременным его инерциальным пеленгованием и инерциальным автосопровождением для его осуществления, состоящая из узкополосного контура 1 инерциального автосопровождения заданного ОВ и широкополосного контура 2 гиростабилизации и управления направлением вектора визирования. При этом система содержит инерциальный дискриминатор 3 сигналов пеленгования заданного ОВ, который включает в свой состав цифровое вычислительное устройство (ЦВУ) 4 и интегрированное устройство (ИАУ). 2 н.п. ф-лы, 9 ил.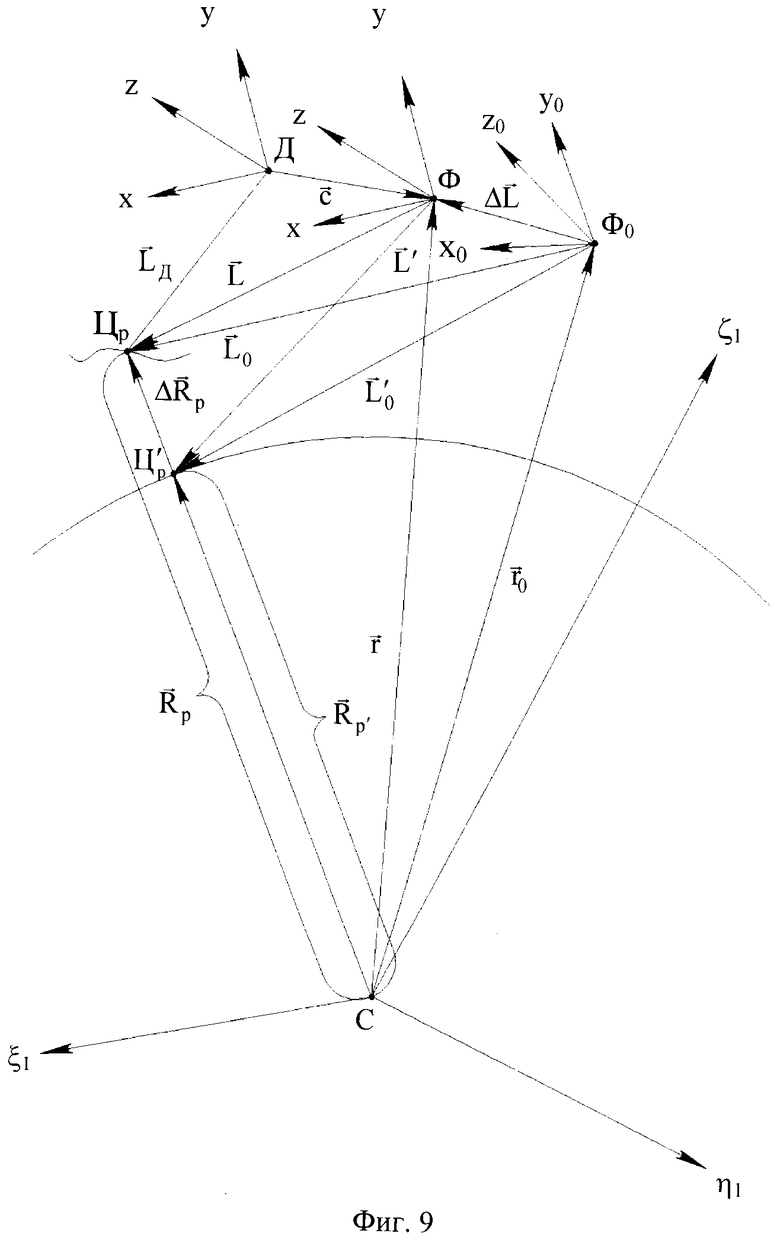
1. Способ формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого объекта визирования (ОВ), с одновременным его инерциальным пеленгованием и инерциальным автосопровождением, характеризующийся тем, что в предстартовом положении подвижного носителя (ПН) бортовой системы самонаведения (БССН) по первоначально определенным и заданным сигналам, пропорциональным начальным значениям угла наклона и азимута относительно жестко установленного внутри корпуса ПН основания интегрированного антенного устройства (ИАУ), несущего гироинерциальные датчики первичной информации пространственного движения его зеркала, в системе координат, связанной с центром масс ПН, наклонной дальности до заданного ОВ, и по сигналам начальной выставки инерциального пеленгования ОВ, пропорциональным начальным значениям проекций вектора линейной скорости предстартового перемещения ПН на соответствующие оси местной горизонтальной системы координат, декартовых координат ПН в местной горизонтальной системе координат, долготы и географической широты ПН, углов рыскания, тангажа и крена ПН, создают информационный массив начального назначения ОВ и начальной выставки инерциального пеленгования ОВ, для чего формируют сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания ИАУ вместе с ПН на соответствующие оси базовой антенной системы координат, углов визирования заданного ОВ соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат, параметров инерциального пеленгования ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, направляющих косинусов, определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным ОВ; в момент старта ПН обновление сигналов начальной информации прекращают, а после старта во время его движения по траектории формируют сигналы, пропорциональные измеренным текущим значениям проекций вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования ОВ на соответствующие оси базовой антенной системы координат, по полученным сигналам текущих проекций вектора кажущегося линейного ускорения движения и проекций вектора абсолютной угловой скорости поворота вектора визирования и по сигналам начальной информации, заданной при предстартовой подготовке ПН, формируют сигнал, пропорциональный рассогласованию между текущим значением наклонной дальности сближения ПН с заданным ОВ и начальным значением наклонной дальности до заданного ОВ в момент старта ПН, по которому осуществляют инерциальное автосопровождение ОВ по дальности, одновременно из полученных сигналов измеренной текущей информации пространственного движения вектора визирования и сигналов начальной информации выделяют сигналы углового рассогласования, пропорциональные текущим значениям параметров инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования соответственно в базовой антенной системе координат, по которым осуществляют инерциальное автосопровождение заданного ОВ по направлению; при достижении значения наклонной дальности сближения ПН с ОВ, равной величине наклонной дальности локационного контакта с облучаемым ОВ, одновременно с инерциальным пеленгованием и инерциальным автосопровождением заданного ОВ в момент времени начала формирования сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, обусловленных траекторными нестабильностями (ТН) и упругими колебаниями корпуса (УКК) ПН, формируют по полученным сигналам инерциального пеленгования и инерциального автосопровождения заданного ОВ сигналы, пропорциональные начальным значениям параметров движения апертуры ИАУ относительно заданного ОВ, т.е.: проекций вектора скорости сближения ПН с заданным ОВ на оси базовой антенной системы координат; наклонной дальности сближения ПН с заданным ОВ; направляющих косинусов, характеризуемых сигналами пеленгования заданного ОВ в базовой антенной системе координат, определяющими положение вектора визирования в базовой антенной системе координат; по полученным сигналам начальной выставки параметров движения апертуры ИАУ, а также по сигналам, пропорциональным измеренным проекциям вектора кажущегося линейного ускорения и проекциям вектора абсолютной угловой скорости центра излучения антенны (ЦИА) на соответствующие оси базовой антенной системы координат, формируют с учетом линейного смещения центра пересечения направления осей чувствительности гироинерциальных датчиков первичной информации пространственного движения ЦИА, установленных соответствующим образом во внутренней рамке двухосного карданова подвеса зеркала ИАУ, сигналы, пропорциональные параметрам ТН и УКК ПН, влияющих на пространственное положение ЦИА относительно облучаемого ОВ, при этом формируют сигналы, пропорциональные параметрам пространственного движения апертуры ИАУ относительно ОВ, т.е. параметрам траекторного сигнала, характеризуемым сигналами пеленгования облучаемого ОВ в системе координат, смещенной относительно базовой антенной системы координат; в момент начала каждого дискретного интервала измерения в режиме поиска ОВ формируют в «остановленной» системе координат сигналы, пропорциональные начальным значениям радиальной скорости и радиальному ускорению движения вектора визирования, т.е. движения ЦИА относительно облучаемого ОВ, затем по полученным сигналам формируют сигнал, пропорциональный фазе опорной функции, и окончательно по сигналу, пропорциональному фазе опорной функции, формируют сигнал, пропорциональный фазовой поправке компенсации фазовых искажений (доплеровского набега фазы) в принимаемых сигналах, отраженных от облучаемого ОВ, далее сформированным сигналом фазовой поправки, подаваемым на вход приемника, внешнего по отношению к заявляемому техническому решению, осуществляют компенсацию фазовых искажений принимаемых сигналов, обусловленных ТН и УКК ПН.
2. Система, осуществляющая способ по п.1, характеризующаяся тем, что состоит из узкополосного контура инерциального автосопровождения заданного ОВ и широкополосного контура гиростабилизации и управления направлением вектора визирования, содержит инерциальный дискриминатор сигналов пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, который включает в свой состав цифровое вычислительное устройство (ЦВУ), а также ИАУ, содержащее зеркало с облучателем и волноводно-коммутирующее устройство (ВКУ), двухосный карданов подвес зеркала, ось поворота наружной рамки которого установлена на основании ИАУ, а ось поворота внутренней рамки установлена в наружной рамке перпендикулярно к ее оси поворота, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчики сигнала поворота наружной рамки и внутренней рамки двухосного карданова подвеса, датчики сигнала поворота наружной и внутренней рамок соответственно по углу наклона и по азимуту, кроме того, управляемый трехстепенной гироскоп, двухканальный гироскопический датчик сигнала угловой скорости (ДУС), три однокомпонентных акселерометра, причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса ИАУ так, что направление кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования ИАУ, при этом гироскоп содержит трехосный карданов подвес ротора, датчик сигнала угла прецессии внутренней рамки трехосного карданова подвеса ротора гироскопа и датчик сигнала угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в корпусе гироскопа, который жестко закреплен во внутренней рамке двухосного карданова подвеса зеркала ИАУ, которое включает в свой состав электронный узел гиростабилизации и управления направлением зеркала на ОВ по углу наклона, электронный узел гиростабилизации и управления направлением зеркала на ОВ по азимуту, а также усилители сигнала обратной связи в соответствующих каналах двухканального гироскопического ДУС, который установлен во внутренней рамке двухосного карданова подвеса зеркала ИАУ так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования ИАУ, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси поворота внутреннее рамки двухосного карданова подвеса зеркала ИАУ, при этом направление кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси поворота наружной рамки двухосного карданова подвеса зеркала ИАУ; все три акселерометра установлены во внутренней рамке двухосного карданова подвеса ИАУ так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных акселерометров, при этом ось чувствительности одного из трех однокомпонентных акселерометров совпадает в заарретированном положении с нулевым направлением линии визирования ИАУ; выходы соответствующих датчиков сигнала угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа соединены с входом соответствующих узлов гиростабилизации и управления направлением зеркала ИАУ на заданный ОВ по углу наклона и по азимуту, выходы которых соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса зеркала ИАУ, при этом выходы датчиков сигнала угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического ДУС соединены с входом усилителей сигнала обратной связи, выходы которых соединены с датчиками сигнала момента внутренней и наружной рамок двухканального гироскопического ДУС; зеркало ИАУ выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно ЦИА облучателя, жестко закрепленного на основании ИАУ, при этом зеркало шарнирно соединено тягами механического координатора ИАУ соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса зеркала ИАУ так, что расстояние между каждым из шарниров на задней поверхности зеркала и его центром поворота равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса зеркала ИАУ и центром поворота этих рамок; ИАУ включает в свой состав также электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, и, кроме того, электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединенного с входом датчика сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, причем сигнал, снимаемый с выхода узла масштабирования сигнала, поступающего с выхода электронного узла формирования управляющего сигнала угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала ИАУ на поперечную ось системы координат, связанной с зеркалом, выход электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, соединен с входом датчика сигнала момента управления направлением внутренней рамки трехосного карданова подвеса ротора гироскопа; выходы трех однокомпонентных акселерометров соединены соответственно с первым, вторым и третьим входами ЦВУ, выходы двухканального гироскопического ДУС и выход электронного узла масштабирования соединены с четвертым, пятым и шестым входами ЦВУ соответственно, а выход датчика сигнала угла поворота наружной рамки и выход датчика сигнала угла поворота внутренней рамки двухосного карданова подвеса зеркала ИАУ соединены с седьмым и восьмым входами ЦВУ соответственно, первый и второй выходы ЦВУ соединены соответственно с входами электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости и с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости; информационный девятый вход ЦВУ соединен информационной линией связи с аппаратурой формирования штатного массива сигналов координат начального определения и установления заданного ОВ и начальной выставки инерциального пеленгования заданного ОВ, внешней по отношению к заявляемой системе, информационный третий выход ЦВУ соединен информационной линией связи с аппаратурой формирования сигналов управления ПН, внешней по отношению к заявляемой системе, при этом четвертый выход ЦВУ соединен информационной линией связи с входом приемника сигнала компенсации фазовых искажений принимаемых сигналов, отраженных от облучаемого ОВ, внешнего по отношению к заявляемой системе.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| US 4542870 А, 24.09.1985 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| US 5786787 А, 28.07.1998 | |||

