Изобретение относится к сельхозмашиностроению, в частности может быть использовано для уборки ягод, преимущественно малины и голубики, а также других плодов, выращиваемых на сформированных в ряд высокостебельных растениях.
Известен активатор ягодоуборочной машины типа «косая шайба», включающий вертикальные пальцевые барабаны, обкатывающиеся вдоль ряда убираемой культуры, пальцы которых совершают колебания в вертикальном направлении (Авторское свидетельство СССР №425587, МКИ A01D 46/26). При взаимодействии колеблющихся пальцев с плодовыми веточками происходит отделение ягод за счет инерционного нагружения их связей с плодоложем или плодоножкой знакопеременными вертикальными импульсами.
Недостатком данного технического решения является то, что максимум амплитуды колебания приходится на концы пальцев, тогда как вблизи оси вращения барабана образуется «мертвая» зона. В связи с этим часть ягод остается не снятыми, а при контакте конца пальца с ветками в местах прикрепления к стеблю часто происходит их обламывание. Все это приводит к значительным потерям урожая.
Наиболее близким к заявляемому техническому решению является конструкция активатора, в котором каждый пальцевый барабан совершает вертикальные колебания при их неизменной амплитуде по длине пальца (Патент США №4580397, НКИ 56-330). В результате увеличивается эффективность воздействия пальцев на ягоды при меньшей вероятности обламывания плодовых веточек (латералов - у малины).
Недостатком данной конструкции является то, что она не в состоянии реализовать оптимальный алгоритм воздействия на плодовые веточки, заключающийся в том, чтобы амплитуда на конце пальца, перпендикулярного ряду, была бы минимальной, а при его повороте (при обкатывании барабаном ряда убираемых растений) на 90° (то есть при ориентации пальца «вдоль ряда») она должна увеличиваться до максимально допустимого значения, неизменного по всей длине пальца.
Проблемы, связанные с оптимизацией алгоритма воздействия пальцев на плодовые веточки, решены в предлагаемом техническом решении за счет монтажа подпружиненной в осевом направлении обечайки, на которой закреплены пальцы одного яруса на оси пальцевого барабана посредством шаровой опоры. В результате при наличии на конце одного из пальцев избыточной нагрузки (например, за счет критического деформирования плодовой веточки вблизи места ее прикрепления к стеблю), вся пальцевая решетка (то есть обечайка вместе с прикрепленными к ней пальцами) проворачивается на шаровой опоре в вертикальном направлении, сводя к минимуму амплитуду колебания конца «проблемного» пальца и исключая обламывание соответствующей плодовой веточки. При этом вблизи оси вращения барабана и на пальцах, повернутых относительно «проблемного» на 90°, сохраняется номинальная величина амплитуды, обусловленная конструктивными параметрами колебательного механизма.
Таким образом, именно совокупность признаков изобретения, отличающих его от прототипа, обеспечивает достижение технического результата: реализацию оптимального алгоритма воздействия на плодовые веточки, исключающего их обламывание при высокой эффективности вибрационного воздействия на ягоды или иные убираемые плоды.
Следовательно, именно отличительные признаки изобретения по сравнению с прототипом, заключающиеся в том, что подпружиненные в осевом направлении пальцевые решетки смонтированы на оси посредством шаровых опор, обеспечивают достижение технического эффекта, в связи с чем они соответствуют критерию «существенные отличия». Поскольку в других технических решениях совокупность отличительных признаков изобретения не обнаружена, то оно соответствует критерию «новизна».
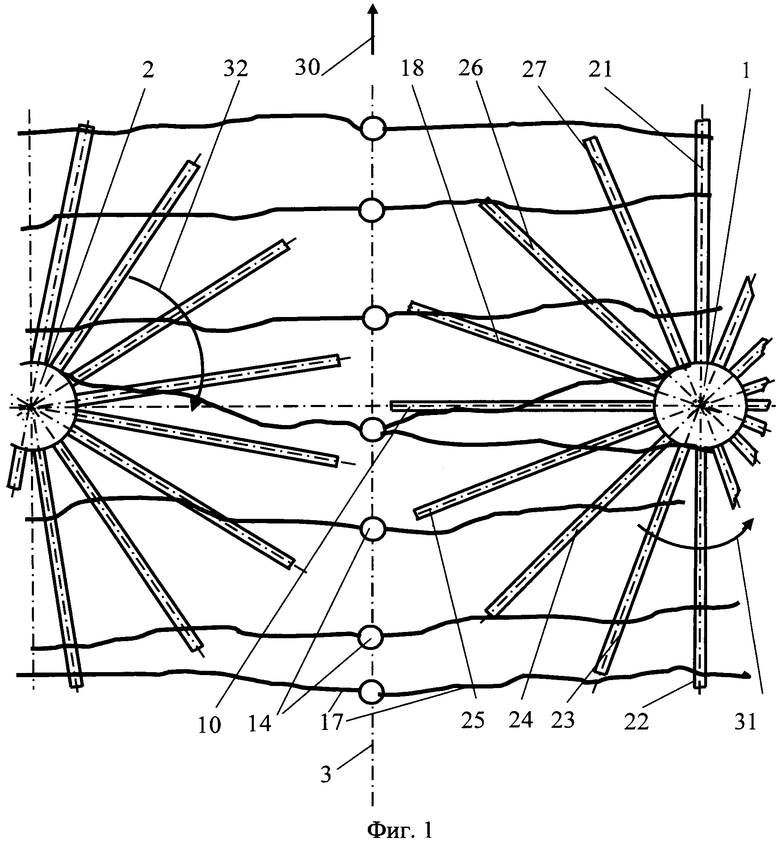
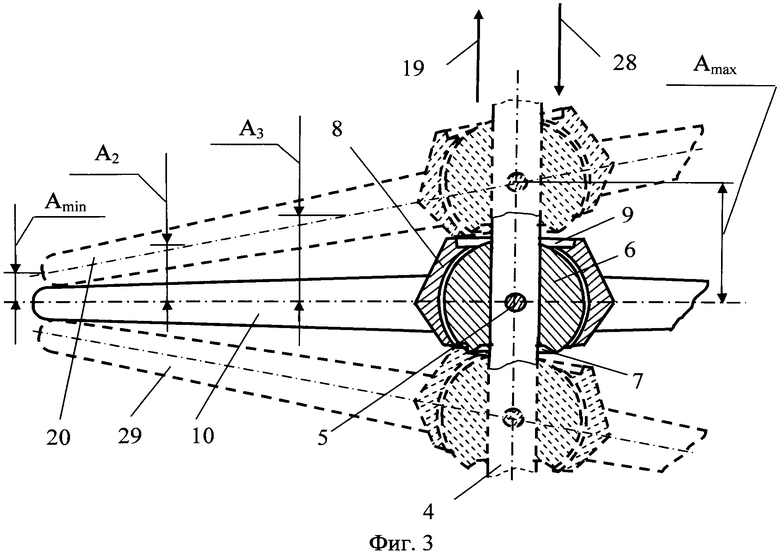
Изобретение поясняется чертежом, где на фиг.1 показано взаимодействие пальцевых барабанов с плодовыми веточками убираемого растения (вид сверху), на фиг.2 изображена конструкция пальцевого барабана (вид сбоку), а на фиг.3 показан характер изменения амплитуды колебания по длине пальца при критическом нагружении его конца.
Активатор уборочной машины включает два вертикальных пальцевых барабана 1 и 2 (фиг.1), размещенных по обе стороны от продольно-вертикальной плоскости симметрии 3 машины. Каждый пальцевый барабан включает ось 4 (фиг.2), смонтированную в подшипниковых опорах и снабженную механизмом, возбуждающим ее вертикальные колебания (на схеме не показаны). На оси 4 посредством штифтов 5 жестко закреплены чередующиеся шаровые опоры 6, в нижней части каждой из которых предусмотрена кольцевая выемка 7 (фиг.3). На каждой шаровой опоре 6 смонтирована обечайка 8, охватывающая ее своей внутренней сферической поверхностью, причем в верхней части обечайки выполнена кольцевая выемка 9, а на боковой поверхности закреплены радиальные пальцы 10 (фиг.2, 3), образующие вместе с обечайкой 8 горизонтальную пальцевую решетку, включающую несколько пальцев (фиг.1). Диаметр верхнего отверстия внутренней сферы обечайки 8 меньше диаметра ее нижнего отверстия. На ось 4 в свободном пространстве между шаровой опорой 6 и смонтированной ниже обечайкой 11 одета пружина сжатия 12, помещенная в эластичный гофрированный кожух 13 и упирающаяся верхним концом в кольцевую выемку 7 шаровой опоры 6, а нижним концом - в кольцевую выемку 9 обечайки 11. Причем верхний диаметр пружины 12 меньше нижнего. При этом нижняя часть кожуха 13 охватывает верхнюю часть обечайки 11, а его верхняя часть входит внутрь выемки 7 шаровой опоры 6. Таким образом, формируется вертикальный пальцевый барабан, состоящий из нескольких расположенных последовательно пальцевых решеток.
Предлагаемый активатор уборочной машины работает следующим образом. В исходном положении (при отсутствии значимой нагрузки на конце пальцев 10 - фиг.2) за счет давления нижней части пружин сжатия 12 все пальцы каждой из пальцевых решеток располагаются на одном уровне (например - перпендикулярно оси 4). Кроме того, давление пружины 12 вызывает момент силы трения между поверхностями шаровой опоры 6 и обечайки 8, что позволяет каждому пальцевому барабану (1 и 2, фиг.1) обкатываться по ряду убираемых растений 14 как единому целому, то есть за счет вращения оси 4 (фиг.2) в соответствующих подшипниковых опорах, а не за счет проскальзывания между собой сферических поверхностей шаровой опоры 6 и обечайки 8. При воздействии на конец пальца силой определенной величины снизу давление пружины 12 может быть преодолено и за счет проскальзывания сферических поверхностей шаровой опоры 6 и обечайки 8 соответствующая пальцевая решетка принимает положение 15 (фиг.2). При приложении усилия сверху вниз пальцевая решетка принимает положение 16.
При взаимодействии с плодовыми веточками 17 убираемых растений 14 (фиг.1) палец 10 контактирует с соответствующими плодовыми веточками вблизи места их крепления к стеблю растения, что вызывает значительное усилие сопротивления деформации. Близкое к этому усилие возникает и на пальце 18. В результате при перемещении оси 4 активатора вверх (по стрелке 19 на фиг.3) на величину Amах пальцевая решетка поворачивается на сферической поверхности шаровой опоры 6 в положение 20. При этом величина амплитуды колебания на конце пальца 10 принимает значение Amin, недостаточное для обламывания соответствующих плодовых веточек, контактирующих с ним. Пальцы 21 и 22 нагружены примерно одинаково, в связи с чем существенного перекоса пальцевой решетки в направлении, параллельном продольно-вертикальной плоскости 3 машины, не возникает, поэтому их амплитуда колебаний близка к номинальной величине Amax на всей длине. Пальцы 23-27 занимают промежуточное положение, поэтому на их концах амплитуда колебания варьируется в пределах A2-A3, что соответствует оптимальному характеру их взаимодействия с соответствующими плодовыми веточками. При этом интенсивность колебания концов плодовых веточек, на которых сосредоточена большая часть урожая, остается практически неизменной и близкой к номинальному значению амплитуды Amах. При перемещении оси 4 вниз по стрелке 28 пальцевая решетка принимает положение 29 (фиг.3), то есть параметры процесса принимают симметричные значения. При перемещении машины вперед по стрелке 30 (фиг.1) пальцевые барабаны 1 и 2 (за счет зацепления их пальцев за элементы растений 14) проворачиваются в подшипниковых опорах по направлению стрелок 31 и 32 соответственно, воспроизводя процесс вибрационного съема ягод или иных плодов в стохастическом взаимодействии с растениями других пальцев. При этом алгоритм воздействия активатора на растения близок к оптимальному, а гофрированные чехлы 13 не позволяют набиваться в зазоры между витками пружин 12 листьям и другим элементам растений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активатор ягодоуборочной машины | 1990 |
|
SU1715235A1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ МАЛИНЫ | 1991 |
|
RU2010491C1 |
| Активатор ягодоуборочной машины | 1990 |
|
SU1768065A1 |
| УЛАВЛИВАЮЩЕЕ УСТРОЙСТВО ЯГОДОУБОРОЧНОЙ МАШИНЫ | 2014 |
|
RU2558181C1 |
| УЛАВЛИВАЮЩЕЕ УСТРОЙСТВО ЯГОДОУБОРОЧНОЙ МАШИНЫ | 2012 |
|
RU2490859C1 |
| УСТРОЙСТВО ДЛЯ ОБЛАМЫВАНИЯ СОСУЛЕК | 2013 |
|
RU2524107C1 |
| ПРИЦЕПНАЯ УБОРОЧНАЯ МАШИНА | 2014 |
|
RU2554394C1 |
| ПОСАДОЧНАЯ МАШИНА | 2010 |
|
RU2448447C1 |
| Встряхиватель ягодоуборочной машины | 1989 |
|
SU1715234A1 |
| УЛАВЛИВАЮЩЕЕ УСТРОЙСТВО ЯГОДОУБОРОЧНОЙ МАШИНЫ | 2022 |
|
RU2787242C1 |
Изобретение относится к сельскохозяйственному машиностроению. Активатор содержит два вертикальных пальцевых барабана, смонтированных по разные стороны от продольно-вертикальной плоскости симметрии машины с возможностью колебаний посредством привода в вертикальном направлении и свободного вращения оси (4) пальцевого барабана вокруг вертикальной оси. На оси пальцевого барабана жестко закреплены чередующиеся шаровые опоры (6). На каждой из опор (6) смонтирована обечайка (8 и 11), охватывающая соответствующую шаровую опору своей внутренней сферической поверхностью. На обечайке закреплены сориентированные в радиальном направлении пальцы (10). В верхней части обечайки выполнена кольцевая выемка, на горизонтальную поверхность которой опирается пружина сжатия (12), охватывающая ось и упирающаяся вторым концом в кольцевую выемку в нижней части, расположенной выше шаровой опоры (6). Пружина (12) закрыта гофрированным чехлом (13) из эластичного материала. Обеспечивается реализация оптимального алгоритма воздействия на плодовые веточки, исключающего их обламывание при высокой эффективности вибрационного воздействия на ягоды или иные убираемые плоды. 1 з.п. ф-лы, 3 ил.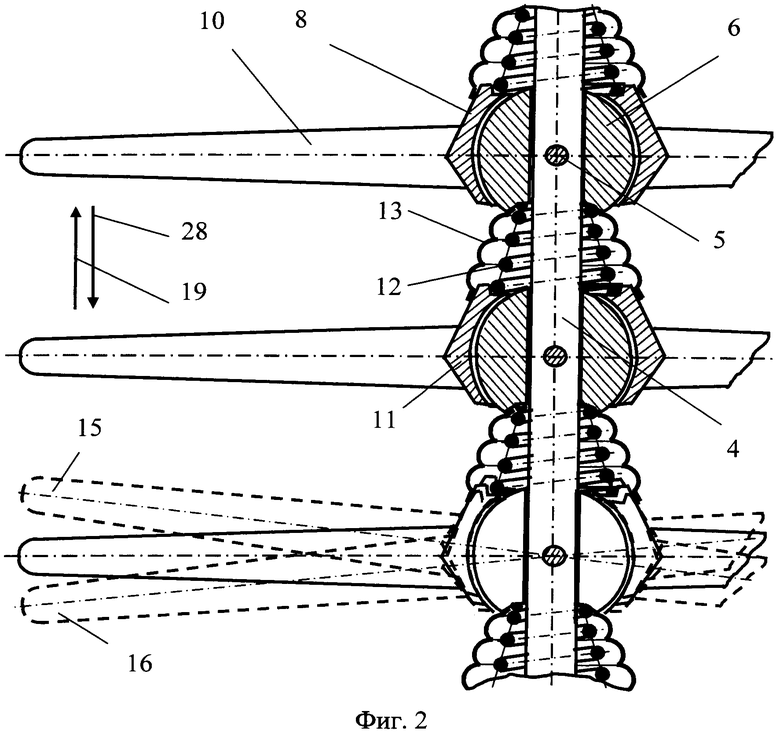
1. Активатор уборочной машины, включающий два вертикальных пальцевых барабана, смонтированных по разные стороны от ее продольно-вертикальной плоскости симметрии с возможностью колебаний посредством привода в вертикальном направлении и свободного вращения оси пальцевого барабана вокруг вертикальной оси, отличающийся тем, что на оси пальцевого барабана жестко закреплены чередующиеся шаровые опоры, на каждой из которых смонтирована обечайка, охватывающая соответствующую шаровую опору своей внутренней сферической поверхностью, а на обечайке закреплены сориентированные в радиальном направлении пальцы, при этом в верхней части обечайки выполнена кольцевая выемка, на горизонтальную поверхность которой опирается пружина сжатия, охватывающая ось и упирающаяся вторым концом в кольцевую выемку в нижней части, расположенной выше шаровой опоры, причем пружина закрыта гофрированным чехлом из эластичного материала.
2. Активатор по п.1, отличающийся тем, что верхний диаметр пружины меньше нижнего, а диаметр верхнего отверстия внутренней сферы обечайки меньше диаметра ее нижнего отверстия, при этом один конец эластичного гофрированного чехла охватывает верхнюю часть обечайки, а второй закреплен внутри кольцевой выемки соответствующей шаровой опоры.
| Активатор ягодоуборочной машины | 1990 |
|
SU1715235A1 |
| ВСТРЯХИВАТЕЛЬ ЯГОД | 1972 |
|
SU425587A1 |
| US 3344591 A, 03.10.1967 | |||
| ТЕРМОПЛАСТИЧНАЯ ПОЛИУРЕТАНОВАЯ ПЛЕНКА И МНОГОСЛОЙНАЯ ПЛЕНКА | 2020 |
|
RU2830427C1 |

