ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к области гидравлических машин объемного вытеснения, а именно к конструкции скважинных штанговых насосов и может быть использовано в нефтегазовой промышленности, сельском хозяйстве и т.д. для добычи жидких веществ из скважин [F04B 47/00].
Из уровня техники известна СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА [RU 2594038 C1, опубл.: 10.08.2016], содержащая силовой привод с тяговым органом, реверсивный приводной орган, две уравновешиваемые линии подъема жидкости разного веса, включающие соответствующие подвески, соединенные с реверсивным приводным органом посредством гибкого элемента, полированные штоки, штанговые колонны и насосы, размещенные в соответствующих изолированных друг от друга колоннах труб, спущенных в скважину, отличающаяся тем, что реверсивный приводной орган соединен с силовым приводом с возможностью вращения и возвратно-поступательного движения совместно с тяговым органом, а реверсивный приводной орган оснащен барабаном с гибкой тягой, выполненной с возможностью намотки на барабан при вращении реверсивного приводного органа, другой конец гибкой тяги закреплен на различном уровне в пределах высоты силового привода на механизме крепления, который выполнен с возможностью фиксации относительно устья скважины.
Недостатком аналога является узкая область их применения, обусловленная ограничениями в применении для условно прямолинейных и мало искривленных скважин. Кроме того, аналог в силу заложенного в него принципа действия и необходимости уравновешивания обладают высокой металлоемкостью и требующие массивного железобетонного фундамента или стального основания.
Также известен ГЛУБИННЫЙ НАСОС С ОПОРНОЙ КОНСТРУКЦИЕЙ [CN 205207148 (U), опубл.: 04.05.2016], содержащий расположенный вертикально корпус насоса, отличающийся тем, что в нижней части корпус насоса снабжен опорной канавкой, а также вспомогательной канавкой, насос содержит опорный блок, пружину смонтированную между опорным блоком и нижней частью опорной канавки, а также включает в себя ряд опорных стоек, опорная стойка включает первый опорный стержень и второй опорный стержень, шарнирно соединенные друг с другом, а опорная канавка снабжена рядом выемок в окружном направлении, конец первого опорного стержня от второго опорного стержня шарнирно прикреплен в нижней части выемки, конец второго опорного стержня от первого опорного стержня шарнирно соединен с нижним краем опорного блока, когда корпус насоса отрывается от земли, опорный блок тянет пружину и одновременно тянет опорные стойки, так что первый опорный стержень и второй опорный стержень выпрямлены и находятся в вертикальном положении, когда корпус насоса перемещается к земле, выемка опорной канавки, подходит к земле, опорный блок находится в опорной канавке, второй опорный стержень расположен горизонтально, а первый опорный стержень наклонен, при этом первый опорный стержень и нижняя часть выемки шарнирно зафиксированы в крайнем положении. «Я бы исключил глубинный насос, так как это элемент, с которым связана насосная штанга».
Недостатком аналога является низкая надежность конструкции, обусловленная смещением центра тяжести опорного блока из-за применения одиночной пружины, а также отсутствие уравновешивающих конструкцию элементов.
Наиболее близким по технической сущности является ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА [SU 1134787 A1, опубл.: 15.01.1985], содержащий связанный с электродвигателем редуктор, выходной вал которого посредством передачи с переменным передаточным отношением сообщен с колонной насосных штанг, причем передача имеет барабан с круговыми цилиндрическими поверхностями и барабан с цилиндрической поверхностью переменного радиуса вращения и расположенные на них гибкие тяги, а барабан с круговыми цилиндрическими поверхностями соединен с колонной штанг через гибкую тягу, отличающийся тем, что с целью повышения эффективности в работе путем снижения затрат энергии, он снабжен уравновешивающим устройством, состоящим из пружинного аккумулятора энергии и дополнительного вала, на котором установлен барабан с цилиндрической поверхностью переменного радиуса вращения, который связан гибким элементом с барабаном, имеющим круговые цилиндрические поверхности (а аккумулятор связан с дополнительным валом).
Основной технической проблемой прототипа является малая надежность гибкой связи из-за отсутствия уравновешивающего механизма, а также высокие энергетические затраты и низкая эффективность насоса, обусловленная значительными диссипативными потерями из-за потерь кинетической энергии, расходуемой на преодоление внутреннего трения в пружине и передачах при разгоне и торможении штанги. Кроме того, изготовление профиля барабана в виде архимедовой спирали приводит к повышению трудозатрат при изготовлении и увеличению габаритов упомянутого барабана при больших значениях массы (больше 1000 кг).
Задачей изобретения является устранение недостатков прототипа.
Технический результат изобретения заключается в снижении энергетических затрат и повышении эксплуатационной надёжности.
Указанный технический результат достигается за счет того, что привод скважинного штангового насоса, содержащий двигатель, насосную штангу, гибкие элементы и уравновешивающее устройство, отличающийся тем, что массу насосной штанги уравновешивают уравновешивающим устройством содержащим, по крайней мере, одну пару шарнирно соединённых рычагов равной длины, один из которых шарнирно соединён с основанием, а второй шарнирно соединён с траверсой, симметрично смонтированной на штанге, на оси шарнирного соединения звеньев упомянутых рычагов смонтированы блоки, на осях шарнирного соединения рычагов с неподвижным основанием смонтировано, как минимум, по два блока, через упомянутые блоки запасован трос, соединенный своими концами с пружинами, которые другими концами соединены с неподвижным основанием, диссипативные потери на разгон и торможение штанги компенсируют накопленной потенциальной энергии в пружинных аккумуляторах, смонтированных в обе стороны от перемычки, смонтированной на насосной штанге, при этом пружинные аккумуляторы выполнены в виде пружин, а компенсацию диссипативных потерь в кинематических парах и пружинных аккумуляторах осуществляют компенсирующим двигателем, управляемым блоком управления, к упомянутому блоку управления подключен, как минимум, один датчик положения насосной штанги.
В частности, штанга соединена с двигателем передачей снабженной обгонной муфтой.
В частности, пружины пружинных аккумуляторов выполнены в виде пружин сжатия.
В частности, двигатель выполнен реверсивным.
В частности, шарнирные рычаги смонтированы симметрично относительно штанги.
В частности, расстояния между осями опор, на которых смонтированы крайние звенья шарнирных рычагов и блоки равно расстоянию между звеньев упомянутых рычагов.
В частности, датчик положения насосной штанги выполнен в виде энкодера.
В частности, энкодер соединен с валом двигателя.
В частности, суммарное максимальное усилие пружин уравновешивающего устройства равно F=4mg.
В частности, суммарная жесткость пружин сжатия пружинного аккумулятора равна  .
.
Краткое описание чертежей.
На фиг. 1 показана кинематическая схема привода скважинного штангового насоса при нижнем положении штанги.
На фиг. 2 показана кинематическая схема привода скважинного штангового насоса при верхнем положении штанги.
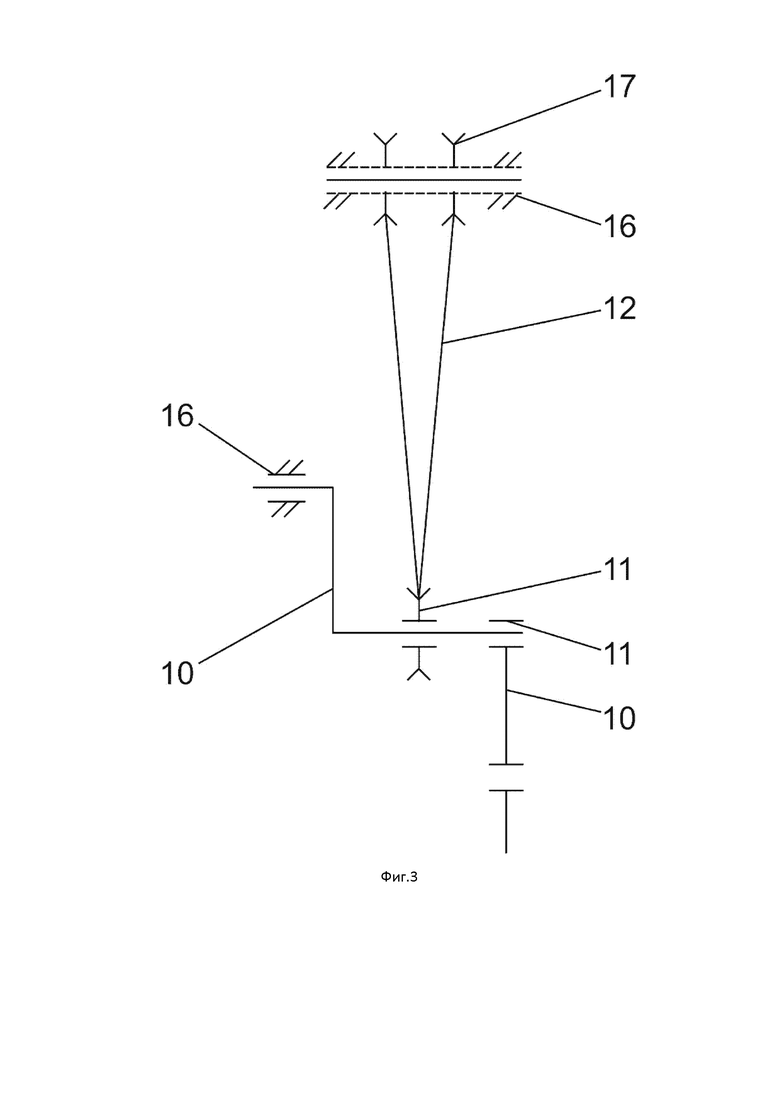
На фиг. 3 показана кинематическая схема уравновешивающего механизма.
На фигурах обозначено: 1 - вертикальные стенки, 2 - основание, 3 - направляющие элементы, 4 - штанга, 5 - двигатель, 6 - горизонтальная перемычка, 7 - верхняя пружина сжатия, 8 - нижняя пружина сжатия, 9 - траверса, 10 - двойные рычаги, 11 - блоки, 12 - гибкие элементы, 13 - уравновешивающие пружины, 14 - датчик положения, 15 - блок управления, 16 - неподвижные опоры, 17 - двойные блоки.
Осуществление изобретения.
Привод скважинного штангового насоса содержит корпус, образованный вертикальными стенками 1 (см. Фиг. 1, 2) и основанием 2. Между вертикальными стенками 1 смонтированы направляющие элементы 3 между которыми вертикально смонтирована штанга 4. Штанга 4 зубчатой передачей (на фигурах не показана) соединена с обгонной муфтой (на фигурах не показана), смонтированной на валу двигателя 5. На штанге 4 смонтирована горизонтальная перемычка 6. От упомянутой горизонтальной перемычки 6 вверх и вниз смонтированы верхняя 7 и нижняя 8 пружины сжатия, соответственно, при этом нижняя пружина сжатия 8 опирается на основание 2, а верхняя пружина сжатия 7 опирается на направляющие элементы 3.
В верхней части штанги 4 поперек симметрично смонтирована траверса 9. С обоих сторон к траверсе 9 шарнирно смонтированы двойные рычаги 10 уравновешивающего механизма. Другие концы упомянутых рычагов 10 соединены к неподвижным опорам 16, смонтированных на вертикальных стенках 1. На осях центральных шарнирных соединений звеньев двойных рычагов 10 смонтированы блоки 11, а в верхней части корпуса на неподвижных опорах 16 коаксиально смонтированы двойные блоки 17 (см. Фиг. 3). Расстояния между осями неподвижных опор 16 на которых смонтированы крайние звенья двойных рычагов 10 и двойные блоки 17 равно расстоянию между звеньями двойных рычагов 10, при этом суммы радиальных нагрузок на траверсу 9 равны нулю. Через блоки 11 с каждой из сторон привода запасованы гибкие элементы 12, выполненные в виде тросов, соединенные с постоянным равномерным натяжением с уравновешивающими пружинами 13, при этом каждый из гибких элементов 12, соединенный с одной из уравновешивающих пружин 13 последовательно огибает один из двойных блоков 17, блок 11, смонтированный на центральной оси двойного рычага 10, а затем второй двойной блок 17 и соединяется со второй уравновешивающей пружиной 13. Уравновешивающие пружины 13 опираются на корпус.
Привод скважинного насоса снабжён датчиком положения 14, подключенным к валу двигателя 5 и выполненным, например, в виде энкодера. Выход датчика положения 14 соединен с блоком управления 15, к другим входам которого подключен двигатель 5.
Привод скважинного штангового насоса используют следующим образом.
При проектирования привода скважинного штангового насоса определяют максимальные усилия и жёсткость пружин 13, для чего принимают, что длины L двойных рычагов 10 больше половины расстояния S между крайними положениями штанги 4, то есть L > S/2.
Суммарное максимальное усилие пружин 13 принимают равным:
F=4mg
Суммарная жесткость пружин 13 определяется из выражения (для двух уравновешивающих устройств):
 =4mg/2L=2mg/L
=4mg/2L=2mg/L
где m - масса штанги, g - ускорение силы тяжести.
Время движения t штанги 4 из одного крайнего положения в другое определяют из уравнения:
Жесткость пружин сжатия 7, 8 определяют исходя из заданного времени t движения штанги 4 из одного крайнего положения в другое и массы штанги:
.
Например, для m = 10000 кг, t = 2с, с = 12325 Н/м.
В исходном положении штанга 4 находится в крайнем нижнем положении (см. Фиг. 1), нижняя пружина сжатия 8 полностью сжата, а верхняя пружина сжатия 7 находится в свободном состоянии. Под действием усилия нижней пружины сжатия 8 начинается подъём штанги 4, одновременно включается двигатель 5, компенсирующий потери на трение в кинематических соединениях. Одновременно с подъемом штанги 4 траверса 9 толкает вверх звенья двойных рычагов 10 относительно неподвижных опор 16, двойные рычаги 10 при этом толкают вверх блоки 11, смонтированные на центральных осях упомянутых рычагов 10. Расстояния между блоками 11 и двойными блоками 17 уменьшаются, уравновешивающие пружины 13 при подъеме штанги 4 равномерно сжимаются с обеих сторон штанги 4 и за счет гибких элементов 12, находящихся в постоянном натяжении упомянутыми пружинами 13, уравновешивают вес штанги 4, блоков 11 и двойных рычагов 10, движущихся вместе со штангой 4.
При прохождении нейтрального положения, когда усилия пружин сжатия 7, 8 выравниваются, дальнейшее движение штанги 4 происходит под действием сил инерции, и потенциальная энергия накапливается в верхней пружине сжатия 7. При достижении штанги 4 верхнего положения (см. Фиг. 2) с датчика положения 14 в блок управления 15 поступает сигнал о текущем положении штанги 4 и ее скорости перемещения. В зависимости от заданного времени выстоя выдерживается технологическая пауза, при этом двигатель 5 отключают. Для перемещения штанги 4 из крайнего верхнего положения в крайнее нижнее положение работа привода осуществляется в обратном описанному выше порядку, при этом двигатель 5 с блока управления 15 переключают в реверсивное движение, для компенсации потерь на трение в кинематических соединениях.
Технический результат - снижение энергетических затрат и повышение эксплуатационной надёжности обеспечивается применением в приводе пружинных аккумуляторов, выполненных в виде пружин сжатия 7, 8, смонтированных непосредственно на штанге 4, обеспечивающих разгон и торможение штанги 4 при работе привода, а также коротких кинематических цепей в уравновешивающем механизме, выполненных в виде, двойных рычагов 10 со звеньями равной длины, подвижно соединяющих основание 2 и траверсу 9 и натянутых уравновешивающими пружинами 13 тросов, запасованных через блоки 11. В описанном колебательном приводе на основе пружин сжатия 7,8 пружинных аккумуляторов при первичной зарядке пружинного аккумулятора затрачивается энергия равная эффективной потенциальной энергии, обеспечивающий колебательный режим, то есть в этом случае движение выходного звена обеспечивается при минимальных затратах энергии, которые обеспечивает двигатель 5 для компенсации диссипативных потерь. По сравнению с типовыми электрическими приводами затраты энергии снижаются в несколько раз и зависят только от диссипативных потерь на внутреннее трение в пружинах и кинематических соединениях. Например, при коэффициенте потерь равном 0,2 затраты энергии снижаются в 4 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРУЖИННЫЙ ПРИВОД ГЛУБИННОГО СКВАЖИННОГО НАСОСА | 2021 |
|
RU2777174C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРУЖИН НА ПРОЧНОСТЬ | 2022 |
|
RU2788307C1 |
| МЕХАТРОННЫЙ ПРУЖИННЫЙ ПРИВОД | 2020 |
|
RU2742446C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНУТРЕННЕГО ТРЕНИЯ ПРУЖИННОГО АККУМУЛЯТОРА | 2023 |
|
RU2813756C1 |
| ЛИНЕЙНЫЙ ПРУЖИННЫЙ АККУМУЛЯТОР НА ОСНОВЕ ПРУЖИН СЖАТИЯ И РАСТЯЖЕНИЯ | 2023 |
|
RU2819635C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2274767C1 |
| СТАНОК-КАЧАЛКА | 2007 |
|
RU2417330C2 |
| УСТАНОВКА ДЛЯ ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2021 |
|
RU2767102C1 |
| Привод скважинного штангового насоса | 1982 |
|
SU1076625A2 |
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
Изобретение относится к области гидравлических машин объемного вытеснения, а именно к конструкции скважинных штанговых насосов и может быть использовано в нефтегазовой промышленности, сельском хозяйстве и т.д. для добычи жидких веществ из скважин. Привод содержит двигатель, насосную штангу, гибкие элементы и уравновешивающее устройство. Массу насосной штанги уравновешивают уравновешивающим устройством, содержащим, по крайней мере, одну пару шарнирно соединённых рычагов равной длины, один из которых шарнирно соединён с основанием, а второй шарнирно соединён с траверсой, симметрично смонтированной на штанге. На оси шарнирного соединения звеньев рычагов смонтированы блоки. На осях шарнирного соединения рычагов с неподвижным основанием смонтировано, как минимум, по два блока. Через блоки запасован трос, соединенный своими концами с пружинами, которые другими концами соединены с неподвижным основанием. Диссипативные потери на разгон и торможение штанги компенсируют накопленной потенциальной энергии в пружинных аккумуляторах, смонтированных в обе стороны от перемычки, смонтированной на насосной штанге. Пружинные аккумуляторы выполнены в виде пружин. Компенсацию диссипативных потерь в кинематических парах и пружинных аккумуляторах осуществляют компенсирующим двигателем, управляемым блоком управления. К блоку управления подключен, как минимум, один датчик положения насосной штанги. Техническим результатом изобретения является снижение энергетических затрат и повышение эксплуатационной надёжности. 9 з.п. ф-лы, 3 ил.
1. Привод скважинного штангового насоса, содержащий двигатель, насосную штангу, гибкие элементы и уравновешивающее устройство, отличающийся тем, что массу насосной штанги уравновешивают уравновешивающим устройством, содержащим, по крайней мере, одну пару шарнирно соединённых рычагов равной длины, один из которых шарнирно соединён с основанием, а второй шарнирно соединён с траверсой, симметрично смонтированной на штанге, на оси шарнирного соединения звеньев упомянутых рычагов смонтированы блоки, на осях шарнирного соединения рычагов с неподвижным основанием смонтировано, как минимум, по два блока, через упомянутые блоки запасован трос, соединенный своими концами с пружинами, которые другими концами соединены с неподвижным основанием, диссипативные потери на разгон и торможение штанги компенсируют накопленной потенциальной энергией в пружинных аккумуляторах, смонтированных по обе стороны от перемычки, смонтированной на насосной штанге, при этом пружинные аккумуляторы выполнены в виде пружин, а компенсацию диссипативных потерь в кинематических парах и пружинных аккумуляторах осуществляют компенсирующим двигателем, управляемым блоком управления, к упомянутому блоку управления подключен, как минимум, один датчик положения насосной штанги.
2. Привод по п.1, отличающийся тем, что штанга соединена с двигателем передачей, снабженной обгонной муфтой.
3. Привод по п.1, отличающийся тем, что пружины пружинных аккумуляторов выполнены в виде пружин сжатия.
4. Привод по п.1, отличающийся тем, что двигатель выполнен реверсивным.
5. Привод по п.1, отличающийся тем, что шарнирные рычаги смонтированы симметрично относительно штанги.
6. Привод по п.1, отличающийся тем, что расстояния между осями опор, на которых смонтированы крайние звенья шарнирных рычагов и блоки, равно расстоянию между звеньями упомянутых рычагов.
7. Привод по п.1, отличающийся тем, что датчик положения насосной штанги выполнен в виде энкодера.
8. Привод по п.7, отличающийся тем, что энкодер соединен с валом двигателя.
9. Привод по п.1, отличающийся тем, что суммарное максимальное усилие пружин уравновешивающего устройства равно F=4mg,
где: m-масса штанги, g-ускорение силы тяжести.
10. Привод по п.1, отличающийся тем, что суммарная жесткость пружин сжатия пружинного аккумулятора равна  ,
,
где: m-масса штанги, t-время движения штанги из одного крайнего положения в другое.
| Привод скважинного штангового насоса | 1982 |
|
SU1134787A1 |
| CN 205207148 U, 04.05.2016 | |||
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2015 |
|
RU2594038C1 |
| МУЛЬТИПЛИКАТОРНЫЙ СИЛОВОЙ ПРИВОД НЕФТЕПРОМЫСЛОВОЙ УСТАНОВКИ | 2006 |
|
RU2333387C2 |
| ПРИВОД ГЛУБИННОГО НАСОСА | 1999 |
|
RU2163311C1 |
| Привод скважинного штангового насоса | 1989 |
|
SU1731988A1 |
| WO 1997037128 A1, 09.10.1997. | |||

