Изобретение относится к области гидравлических машин объемного вытеснения, а именно к конструкции скважинных штанговых насосов, и может быть использовано в нефтегазовой промышленности, сельском хозяйстве и т.д. для добычи жидких веществ из скважин [F04B 47/02, F04B 47/026].
Из уровня техники известен ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА [RU 2133875 C1, опубл.: 27.07.1999], содержащий электродвигатель, кинематически связанный с ним двухходовый винт с гайкой, ролики с тяговым элементом, отличающийся тем, что гайка установлена с возможностью осевого перемещения по вертикальной направляющей, непосредственно соединена со штанговой колонной снизу, а сверху - колонной насосно-компрессорных труб тягой, выполненной в виде гибкой связи, кроме того, снабжен уравновешивающим контргрузом, размещенным на стойке, расположенной соосно с винтом, причем высота стойки больше длины хода гайки.
Недостатком аналога является низкая эффективность привода, обусловленная отсутствием возможности накопления энергии для ее дальнейшего использования в качестве инерционной силы для перемещения штанги.
Также известен ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА [SU 1134787 A1, опубл.: 15.01.1985], содержащий связанный с электродвигателем редуктор, выходной вал которого посредством передачи с переменным передаточным отношением сообщен с колонной насосных штанг, причем передача имеет барабан с круговыми цилиндрическими поверхностями и барабан с цилиндрической поверхностью переменного радиуса вращения и расположенные на них гибкие тяги, а барабан с круговыми цилиндрическими поверхностями соединен с колонной штанг через гибкую тягу, отличающийся тем, что с целью повышения эффективности в работе путем снижения затрат энергии, он снабжен уравновешивающим устройством, состоящим из пружинного аккумулятора энергии и дополнительного вала, на котором установлен барабан с цилиндрической поверхностью переменного радиуса вращения, который связан гибким элементом с барабаном, имеющим круговые цилиндрические поверхности (а аккумулятор связан с дополнительным валом).
Недостатком аналога является малая надежность гибкой связи из-за отсутствия уравновешивающего механизма, а также высокие энергетические затраты и низкая эффективность насоса, обусловленная значительными диссипативными потерями из-за потерь кинетической энергии, расходуемой на преодоление внутреннего трения в пружине и передачах при разгоне и торможении штанги. Кроме того, изготовление профиля барабана в виде архимедовой спирали приводит к повышению трудозатрат при изготовлении и увеличению габаритов упомянутого барабана при больших значениях массы (больше 1000 кг).
Наиболее близким по технической сущности является ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА [RU 2741187 C1, опубл.: 22.01.2021], содержащий двигатель, насосную штангу, гибкие элементы и уравновешивающее устройство, отличающийся тем, что массу насосной штанги уравновешивают уравновешивающим устройством, содержащим, по крайней мере, одну пару шарнирно соединенных рычагов равной длины, один из которых шарнирно соединен с основанием, а второй шарнирно соединен с траверсой, симметрично смонтированной на штанге, на оси шарнирного соединения звеньев упомянутых рычагов смонтированы блоки, на осях шарнирного соединения рычагов с неподвижным основанием смонтировано, как минимум, по два блока, через упомянутые блоки запасован трос, соединенный своими концами с пружинами, которые другими концами соединены с неподвижным основанием, диссипативные потери на разгон и торможение штанги компенсируют накопленной потенциальной энергией в пружинных аккумуляторах, смонтированных по обе стороны к траверсе, смонтированной на насосной штанге, при этом пружинные аккумуляторы выполнены в виде пружин, а компенсацию диссипативных потерь в кинематических парах и пружинных аккумуляторах осуществляют компенсирующим двигателем, управляемым блоком управления, к упомянутому блоку управления подключен, как минимум, один датчик положения насосной штанги.
Основной технической проблемой прототипа является невозможность изменения его быстродействия при постоянной массе штанги, а также значительные габаритные размеры.
Задачей изобретения является устранение недостатков прототипа.
Технический результат изобретения заключается в повышении удельной производительности пружинного привода глубинного скважинного насоса.
Указанный технический результат достигается за счет того, что пружинный привод глубинного скважинного насоса, содержащий двигатель, штангу, подвижно смонтированную в направляющих, пружинный двигатель и трособлочную систему, отличающийся тем, что дополнительно содержит пружинные двигатели, при этом все пружинные двигатели смонтированы симметрично с двух сторон штанги и соединены со штангой трособлочной системой, которая представляет собой блок, смонтированный на штанге, в плоскости, перпендикулярной плоскости перемещения штанги по нормали к нейтральному равновесному положению штанги, на расстоянии е от блока штанги на подвижном вдоль этой нормали элементе, выполненном с возможностью изменения расстояния e и тем самым изменения быстродействия или максимального хода штанги, на одной оси смонтирована пара блоков, вращающихся независимо друг от друга, при этом ось вращения упомянутых блоков расположена параллельно оси вращения блока штанги, на одной прямой с блоком штанги в ее нейтральном равновесном положении и парой блоков смонтировано, по крайней мере, два отклоняющих блока, выполненных с возможностью изменения направления гибкого элемента трособлочной системы, а пружинные двигатели с возможностью регулирования предварительного усилия пружин снабжены натяжными механизмами, соединяющими корпуса пружинных двигателей с неподвижными опорами, причем двигатель выполнен с возможностью обеспечения накопления потенциальной энергии в пружинах пружинных двигателей.
В частности, подвижный элемент выполнен винтовым.
В частности, натяжные механизмы выполнены в виде талрепов.
В частности, для уменьшения длины пружинных двигателей на их штоках смонтированы блоки.
В частности, концы гибкого элемента трособлочной системы, огибающие блоки штоков, смонтированы неподвижно на опорной поверхности.
В частности, расстояние между центральными осями пружинных двигателей равно двум диаметрам блоков, смонтированных на их штоках, при этом линия, проходящая параллельно осям пружинных двигателей, проходит через ось шарнирного соединения двух отклоняющих блоков на равном расстоянии от блоков штоков.
В частности, для упрощения изменения характеристик привода гибкий элемент трособлочной системы выполнен замкнутым и запасован вокруг регулируемого опорного блока, снабженного натяжным механизмом и размещенного между блоками штоков каждой из пары пружинных двигателей.
Краткое описание чертежей.
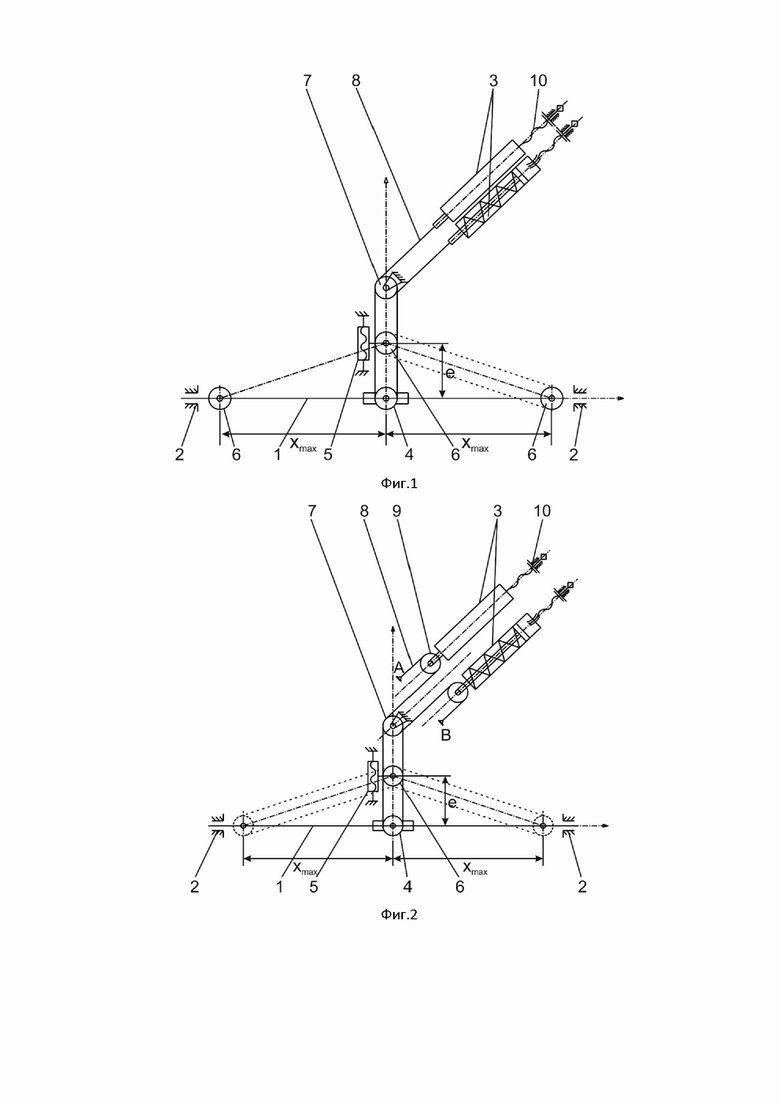
На фиг. 1 показана упрощенная схема пружинного привода глубинного скважинного насоса.
На фиг. 2 показана упрощенная схема пружинного привода глубинного скважинного насоса с неподвижной фиксацией концов гибкого элемента.
На фиг. 3 показана схема пружинного привода глубинного скважинного насоса.
На фиг. 4 показана схема пружинного привода глубинного скважинного насоса с неподвижной фиксацией концов гибкого элемента.
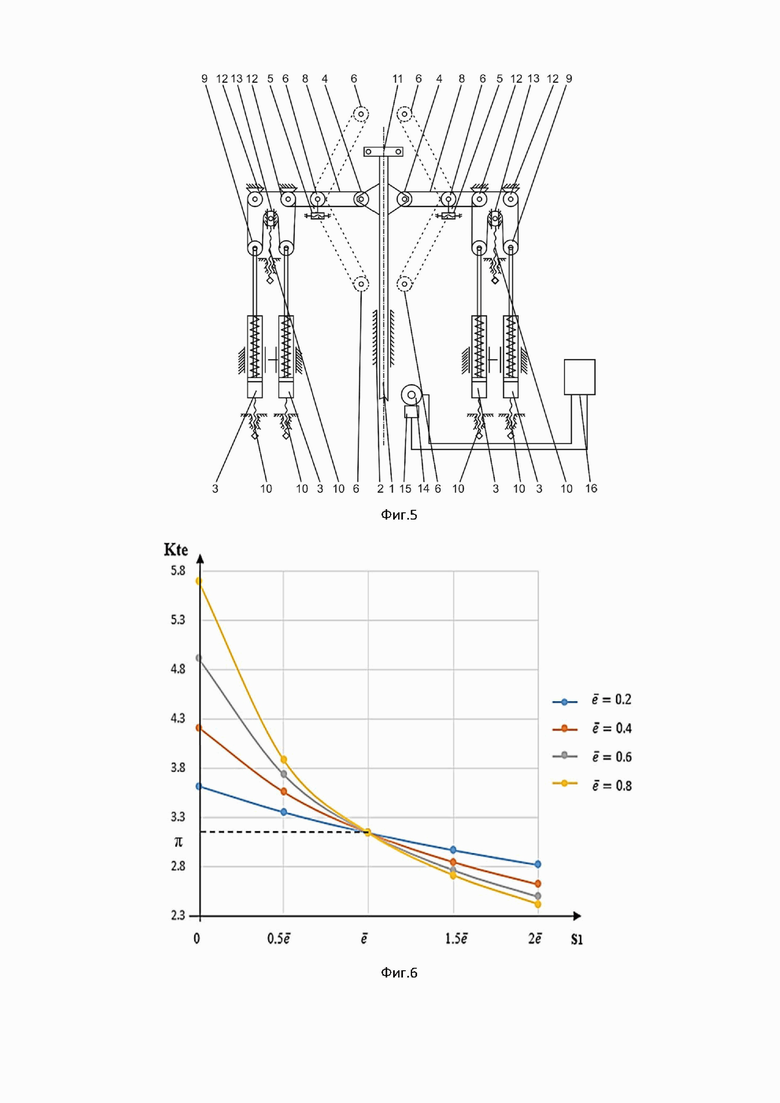
На фиг. 5 показана схема пружинного привода глубинного скважинного насоса с регулируемым опорным блоком.
На фиг. 6 показан график изменения коэффициента  в зависимости от параметров
в зависимости от параметров  и
и  .
.
На фигурах обозначено: 1 - штанга, 2 - направляющие штанги, 3 - пружинные двигатели, 4 - блок, 5 - подвижные элементы, 6 - двойные блоки, 7 - двойные отклоняющие блоки, 8 - гибкий элемент, 9 - блоки штоков, 10 - натяжные механизмы, 11 - траверса, 12 - отклоняющие блоки, 13 - регулируемые опорные блоки, 14 - двигатель, 15 - датчик положения, 16 - блок управления.
Осуществление изобретения.
Пружинный привод глубинного скважинного насоса содержит штангу 1 (см. Фиг1), подвижно смонтированную в направляющих 2 и пружинные двигатели 3 с пружинами сжатия. На штанге 1 смонтирован блок 4. В плоскости, перпендикулярной плоскости перемещения штанги 1 смонтирован подвижный элемент 5, на котором по нормали к нейтральному (равновесному) положению штанги 1 на расстоянии е от блока 4 смонтирован двойной блок 6, при этом ось вращения упомянутого блока 6 расположена параллельно оси вращения блока 4. Подвижный элемент 5 выполнен с возможностью изменения расстояния e, и выполнен, например, винтовым. На одной прямой с блоком 4 штанги 1 в ее нейтральном (равновесном) положении и двумя блоками 6 смонтированы два отклоняющих блока 7, выполненных опорными. В одном из вариантов реализации упомянутые отклоняющие блоки 7 смонтированы независимо друг от друга на одной оси.
Штоки пружинных двигателей 3 соединены между собой гибким элементом 8, выполненным в виде троса или каната, при этом один конец гибкого элемента 8 закреплен к штоку верхнего пружинного двигателя 3, последовательно огибает один из отклоняющих блоков 7, по кругу на 360 градусов один из двойных блоков 6, блок 4 штанги 1 и в обратной последовательности, огибает по кругу на 360 градусов второй из двойных блоков 6, по кругу на 360 градусов второй из отклоняющих блоков 7 и соединен со штоком второго из пружинных двигателей 3.
В одном из вариантов реализации на штоках пружинных двигателей 3 смонтировано по одному блоку штока 9 (см. Фиг. 2), при этом концы гибкого элемента 8 зеркально симметрично огибают упомянутые блоки штоков 9 и закреплены неподвижно в точках А и В. Расстояние между центральными осями пружинных двигателей 3 равно двум диаметрам блоков штоков 9, причем линия, проходящая параллельно корпусам (осям) пружинных двигателей 3 проходит через ось шарнирного соединения отклоняющих блоков 7 на равном расстоянии от осей пружинных двигателей 3.
Для изменения предварительного усилия пружин пружинных двигателей 3 упомянутые пружинные двигатели 3 снабжены натяжными механизмами 10.
На фиг. 3-5 показаны варианты реализации пружинного привода глубинного скважинного насоса с симметричным расположением пружинных двигателей 3 относительно штанги 1 (см. Фиг. 3), с блоками штоков 9 и неподвижной фиксацией концов гибкого элемента 8 (см. Фиг. 4) для уменьшения длины пружин пружинных двигателей 3, с замкнутым гибким элементом вокруг регулируемого опорного блока 13, снабженного натяжным механизмом 10 и размещенного между блоками штоков 9 каждой из пары пружинных двигателей 3 (см. Фиг. 5) для упрощения изменения характеристик привода.
На верхнем конце штанги 1 для присоединения ее к уравновешивающему устройству (на фигурах не показан) смонтирована траверса 11. Пружинные двигатели 3 зафиксированы к опорной поверхности натяжными механизмами 10, выполненными, например, в виде талрепов.
Штанга 1 зубчатой передачей (на фигурах не показана) соединена с обгонной муфтой (на фигурах не показана), смонтированной на валу двигателя 14. Привод скважинного насоса снабжен датчиком положения 15, подключенным к валу двигателя 14 и выполненным, например, в виде энкодера. Выход датчика положения 15 соединен с блоком управления 16, к другому входу которого подключен двигатель 14.
В качестве примера рассмотрим принцип действия пружинного привода глубинного скважинного насоса с симметричным расположением пружинных двигателей 3 относительно штанги 1 (см. Фиг. 3) без учета силы тяжести.
Штанга 1, снабжена двумя блоками 4, каждый из которых является частью пружинного привода, причем они расположены симметрично относительно штанги 1. Суммарное воздействие на штангу 1 усилий предварительной деформации пружин пружинных двигателей 3 стремится к нулю. При этом на штанге 1 сверху установлена траверса 11, для присоединения к уравновешивающему устройству.
На подвижных элементах 5, смонтированных симметрично относительно штанги 1, установлено по двойному блоку 6, так как гибкий элемент 8, огибающий упомянутые двойные блоки 6 и приводящий их во вращение перемещается в противоположные стороны и, соответственно, блоки двойных блоков 6, смонтированные независимо на одной оси также вращаются в разные стороны, в том числе и с различными угловыми скоростями. Подвижные элементы 5 выполнены с возможностью изменения расстояния е между штангой 1 и осью двойных блоков 6.
На корпусе 2 пружинного привода с каждой стороны установлено, в зависимости от компоновки, как минимум, по двойному отклоняющему блоку 7, смонтированных независимо на одной оси, или по крайней мере, по два отклоняющих блока 12, смонтированных на разных осях.
Рассмотрим работу привода, показанного на фиг. 3.
Примем, что штанга 1 вместе с блоками 4 находятся в крайнем верхнем положении. В этом случае пружины пружинных двигателей 3 сжаты и в них накоплена максимальная потенциальная энергия. Первичная максимальная потенциальная энергия накапливается таким же образам, как постепенно раскачиваются детские качели, когда последовательным подталкиванием с одной стороны получают требуемую амплитуду движения. В описываемом пружинном приводе это обеспечивают двигателем 14, подключенным к блоку управления 16, который отключают при достижении штанги 1 верхнего положения при получении блоком управления 16 сигнала с датчика положения 15. Под действием усилия пружин пружинных двигателей 3 штанга 1 массой m с блоками 4, стремясь к положению равновесия, движется вниз. При достижении положения равновесия штанга 1 массой m имеет максимальную скорость и максимальную кинетическую энергию. Дальнейшее движение штанги 1 продолжается под действием сил инерции, и кинетическая энергия штанги 1 через трособлочную систему, образованную блоками 4, двойными блоками 6, отклоняющими блоками 12 и запасованными гибкими элементами 8 преобразуют в потенциальную энергию пружин пружинных двигателей 3.
Для перемещения штанги 1 из крайнего нижнего положения в крайнее верхнее положение работа пружинного привода осуществляется в обратном порядке, при этом двигатель 14 с блока управления 16 для компенсации потерь на трение в кинематических соединениях переключают в реверсивное движение.
Новым является то, что описанным выше способом можно изменять характеристики привода. Базовая конфигурация с линейным пружинным аккумулятором обеспечивается при таких конструктивных параметрах, в которых предварительная деформация пружины равна расстоянию e от оси блоков 4 до осевой линии штанги 1. Изменяя соотношения этих двух величин, можно изменять максимальное перемещение xmax штанги 1 , а также менять быстродействие, как в меньшую так и в большую сторону (см. Фиг. 6).
Характеристиками рабочей операции являются перемещение штанги 1 из одного крайнего положения в другое, равное 2xmax и время перемещения t и масса m штанги 1 m.
Пружины работают с предварительной деформацией, которая определяется решаемой задачей. Для получения характеристик линейной колебательной системы необходимо обеспечить предварительную деформацию пружин равной расстоянию е, где e - минимальное расстояние между осью шарнирного соединения подвижного двойного блока 6, установленного на подвижном элементе 5 и штангой 1.
Начальная длина пружины сжатия lo для такой конфигурации должна быть равна:
За базовый вариант принимают конфигурацию, когда максимальный ход пружины h равен или больше выражения:

Такое значение максимального хода пружины при эксплуатации позволяет при неизменном значении е получить конфигурации, отличающиеся от базовой конфигурации.
При предварительной деформации пружины s1=e, получают линейную колебательную систему, в которой время перемещения из одного крайнего положения в другое, равное 2xmax определяют из уравнения:
Уменьшая предварительную деформацию пружин в пружинных двигателях 3 до нуля, получают нелинейную колебательную систему, в которой ход штанги 1 2xmax больше базового. Увеличивая предварительную деформацию упомянутых пружин, увеличивают быстродействие пружинных двигателей 3 и пружинного привода в целом.
Сохраняя неизменным значение е и не увеличивая предварительную деформацию пружин, увеличивают ход штанги 1 2xmax при неизменном быстродействии пружинного привода, и все это можно изменять в процессе эксплуатации.
На фиг. 6 показаны графики изменения коэффициента в зависимости от параметров и  , где
, где  безразмерный коэффициент, получаемый при решении интегрального уравнения:
безразмерный коэффициент, получаемый при решении интегрального уравнения:

где,  =e/
=e/ ,
,  =
= /,
/,  =
= /.
/.
Из графиков видно, что все кривые пересекаются в одной точке e=s1, где коэффициент Kte равен π. При s1 больше e коэффициент Kte меньше π. Следовательно, для изменения времени перемещения t штанги 1 в меньшую сторону, увеличивают предварительное натяжение пружин s1 и наоборот, уменьшая предварительное натяжение пружин s1, увеличивают время перемещения t штанги 1. Для оперативного выполнения таких операций в процессе эксплуатации пружинного привода сдвоенные блоки 6 снабжены подвижными элементами 5, позволяющими изменять расстояние e, а пружинные двигатели 3 снабжены натяжными механизмами 10.
На фиг. 4, 5 представлены схемы пружинных приводов, где для уменьшения длины пружин и соответственно изменения характеристик пружинного привода (t, xmax) используют отклоняющие блоки 12, выполненные опорными. Пружинный привод состоит из штанги 1, перемещающейся в направляющих 2. На штанге 1 установлены блоки 4. В обе стороны от штанги 1 на расстоянии по нормали к среднему положению равном е установлены подвижные сдвоенные блоки 6 и по два отклоняющих блока 12. Кроме того, на штоках пружинных двигателях 3 установлены блоки штоков 9.
Несмотря на то, что техническое решение было подробно описано с целью иллюстрации на основе вариантов осуществления, которые в настоящий момент считаются наиболее практичными и предпочтительными, следует понимать, что подобные детали служат исключительно указанной цели, при этом изобретение не ограничено раскрытыми вариантами осуществления, а охватывает эквивалентные варианты соединения, не выходящие за рамки объема притязаний формулы изобретения. Следует понимать, что изобретение предполагает, насколько это возможно, что один или более признаков любого варианта осуществления могут быть объединены с одним или более признаками любого другого варианта осуществления.
Описанные примеры являются частными случаями реализации пружинного привода глубинного скважинного насоса и не ограничивают объем изобретения, который определяется формулой изобретения с учетом возможных вариантов.
Технический результат - повышение удельной производительности пружинного привода глубинного скважинного насоса достигается за счет получения нелинейной колебательной трособлочной системы в которой ход штанги 1 больше базового, что позволяет снизить массогабаритные размеры привода или увеличить ход штанги при прочих равных условиях и состоящей из одинарных 4, 9, 12 и двойных 6, 7 подвижных и неподвижных блоков, запасованных гибким элементом 8 в ходе работы которых обеспечивают предварительную деформацию пружин пружинных приводов 3 равной минимальному расстоянию e между осью шарнирного соединения двойного блока 6 и штангой 1, при этом обеспечена возможность регулирования упомянутого расстояния e с помощью подвижных элементов 5, на которых смонтированы двойные блоки 6. Кроме того, предварительную деформацию упомянутых пружин обеспечивают за счет монтажа пружинных двигателей 3 с помощью натяжных механизмов 10, что дает возможность увеличения быстродействия пружинных двигателей 3 и пружинного привода в целом и, соответственно, повысить удельную производительность пружинного привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2020 |
|
RU2741187C1 |
| МЕХАТРОННЫЙ ПРУЖИННЫЙ ПРИВОД | 2020 |
|
RU2742446C1 |
| ГРУНТОУКЛАДОЧНОЕ ПЛАВУЧЕЕ СРЕДСТВО | 1993 |
|
RU2078711C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАЗМАТЫВАНИЯ И ПРОТЯГИВАНИЯ РУЛОННОГО МАТЕРИАЛА | 2021 |
|
RU2753622C1 |
| СТАНОК-КАЧАЛКА | 2009 |
|
RU2406874C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРУЖИН НА ПРОЧНОСТЬ | 2022 |
|
RU2788307C1 |
| Турбовоздушный привод скважинного штангового насоса | 2016 |
|
RU2626900C1 |
| Установка для обработки корпуса судна в доке | 1979 |
|
SU872382A1 |
| Скважинная штанговая насосная установка | 2020 |
|
RU2727833C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2715120C1 |

Изобретение относится к области гидравлических машин объемного вытеснения, а именно к пружинному приводу глубинного скважинного насоса. Привод содержит двигатель 14, штангу 1, подвижно смонтированную в направляющих 2, пружинные двигатели 3, смонтированные симметрично с двух сторон штанги 1 и соединенные с ней трособлочной системой. Двигатели 3 с возможностью регулирования предварительного усилия пружин снабжены натяжными механизмами 10, соединяющими корпуса двигателей 3 с неподвижными опорами. Двигатель 14 выполнен с возможностью обеспечения накопления потенциальной энергии в пружинах двигателей 3. Изобретение направлено на повышение удельной производительности привода, что достигается за счет получения нелинейной колебательной трособлочной системы, в которой ход штанги 1 больше базового, что позволяет снизить массогабаритные размеры привода или увеличить ход штанги 1, и состоящей из одинарных и двойных подвижных и неподвижных блоков, запасованных гибким элементом 8, в ходе работы которых обеспечивают предварительную деформацию пружин двигателей 3, равную минимальному расстоянию между осью шарнирного соединения двойного блока 6 и штангой 1. Обеспечена возможность регулирования указанного расстояния с помощью подвижных элементов 5, на которых смонтированы блоки 6. 6 з.п. ф-лы, 6 ил.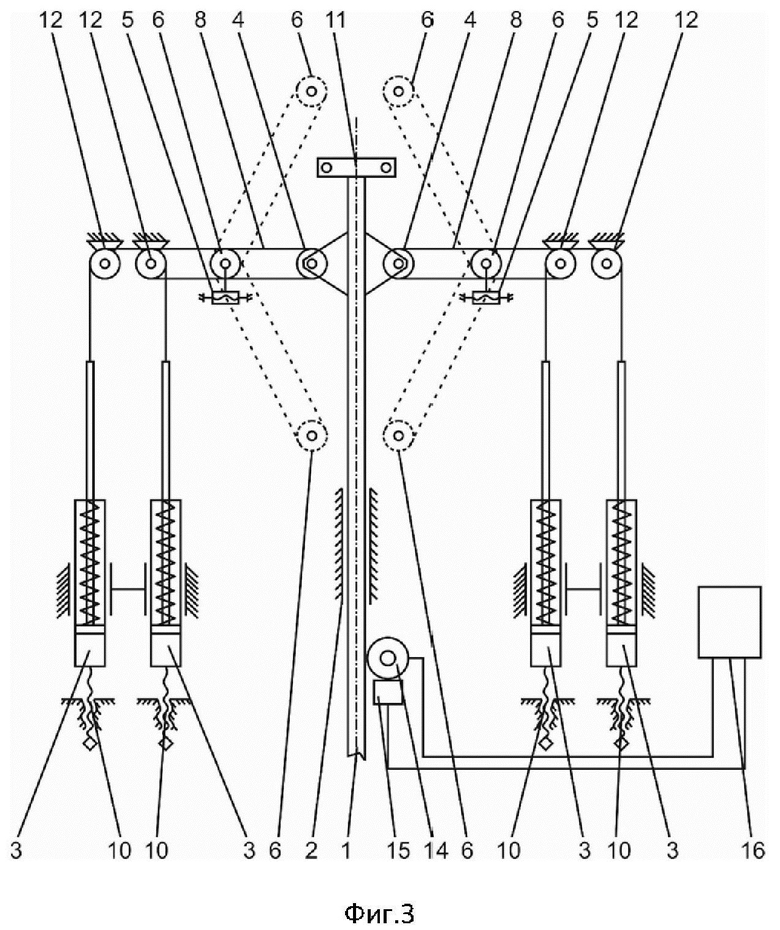
1. Пружинный привод глубинного скважинного насоса, содержащий двигатель, штангу, подвижно смонтированную в направляющих, пружинный двигатель и трособлочную систему, отличающийся тем, что дополнительно содержит пружинные двигатели, при этом все пружинные двигатели смонтированы симметрично с двух сторон штанги и соединены со штангой трособлочной системой, которая представляет собой блок, смонтированный на штанге, в плоскости, перпендикулярной плоскости перемещения штанги по нормали к нейтральному равновесному положению штанги, на расстоянии е от блока штанги на подвижном вдоль этой нормали элементе, выполненном с возможностью изменения расстояния e и тем самым изменения быстродействия или максимального хода штанги, на одной оси смонтирована пара блоков, вращающихся независимо друг от друга, при этом ось вращения упомянутых блоков расположена параллельно оси вращения блока штанги, на одной прямой с блоком штанги в ее нейтральном равновесном положении и парой блоков смонтировано по крайней мере два отклоняющих блока, выполненных с возможностью изменения направления гибкого элемента трособлочной системы, а пружинные двигатели с возможностью регулирования предварительного усилия пружин снабжены натяжными механизмами, соединяющими корпуса пружинных двигателей с неподвижными опорами, причем двигатель выполнен с возможностью обеспечения накопления потенциальной энергии в пружинах пружинных двигателей.
2. Привод по п. 1, отличающийся тем, что подвижный элемент выполнен винтовым.
3. Привод по п. 1, отличающийся тем, что натяжные механизмы выполнены в виде талрепов.
4. Привод по п. 1, отличающийся тем, что для уменьшения длины пружинных двигателей на их штоках смонтированы блоки.
5. Привод по п. 4, отличающийся тем, что концы гибкого элемента трособлочной системы, огибающие блоки штоков, смонтированы неподвижно на опорной поверхности.
6. Привод по п. 4, отличающийся тем, что расстояние между центральными осями пружинных двигателей равно двум диаметрам блоков, смонтированных на их штоках, при этом линия, проходящая параллельно осям пружинных двигателей, проходит через ось шарнирного соединения двух отклоняющих блоков на равном расстоянии от блоков штоков.
7. Привод по п. 4, отличающийся тем, что для упрощения изменения характеристик привода гибкий элемент трособлочной системы выполнен замкнутым и запасован вокруг регулируемого опорного блока, снабженного натяжным механизмом и размещенного между блоками штоков каждой из пары пружинных двигателей.
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2020 |
|
RU2741187C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2007 |
|
RU2350786C1 |
| Привод скважинного штангового насоса | 1982 |
|
SU1134787A1 |
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКОГО ПАРОТИТА (СИАЛОДОХИТА) И СЛЮННОКАМЕННОЙ БОЛЕЗНИ ПРИ РАСШИРЕНИИ ВНУТРИЖЕЛЕЗИСТОЙ ЧАСТИ ОКОЛОУШНОГО ПРОТОКА | 2003 |
|
RU2240060C2 |
| US 6213722 B1, 10.04.2001. | |||

