ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу позиционирования устройства получения рентгеновского изображения, медицинской системе визуализации изображений, содержащей устройство получения рентгеновского изображения и адаптированной для автоматизированного позиционирования устройства получения рентгеновского изображения, элемент компьютерной программы для выполнения способа позиционирования устройства получения рентгеновского изображения и машиночитаемый носитель.
УРОВЕНЬ ТЕХНИКИ
Системное сердечное заболевание охватывает много состояний и заболеваний, которые могут сказываться на самой сердечной мышце, строении сердца и сердечных клапанов, управляющих потоком крови в и из сердца. Системные сердечные заболевания могут быть уже при рождении или могут развиваться позже на протяжении жизни, что может быть обусловлено несколькими причинами. Например, заболевания коронарной артерии могут вызвать закупоривания сердечных артерий. Чтобы улучшить состояние сердца, проводят малоинвазивное лечение. Например, стеноз и недостаточность сердечных клапанов, застойная сердечная недостаточность и кардиомиопатия могут быть снижены инвазивным лечением. Это лечение может включать ангиопластику и стентирование, хирургическое исправление и замену митрального клапана, хирургическую операцию на сердце в целом и реваскуляризацию. Далее рассматривается малоинвазивное лечение структурных дефектов сердца путем малоинвазивного чрескожного прохода (например, катетеризации или ввода иглы), которое контролируется, например, рентгеноскопией с C-дугой.
В связи с этим динамический трехмерный план действий обеспечивает реальную навигацию через извитую сосудистую сеть или другую патологическую анатомическую структуру, при этом достигается совмещение в режиме реального времени двумерных рентгеноскопических изображений с трехмерным восстановленным изображением дерева сосудов. Двумерное изображение может быть обеспечено устройством получения рентгеновского изображения, например, с так называемой С-дугой. В результате, на изображении видно продвижение проволочного проводника, катетера, стентов, спиралей или игл на одном изображении в режиме реального времени, и это улучшает визуализацию при сложных хирургических вмешательствах.
Чтобы полученные двумерные изображения согласовать с трехмерным представлением набора данных, система отсчета устройства получения рентгеновского изображения, например рентгеновской системы с С-дугой, и система отсчета набора трехмерных мультимодальных данных должны совмещаться. Точное совмещение с двумерным проекционным рентгеновским изображением может быть выполнено как вручную, так и автоматически с использованием алгоритма совпадения.
Для разных задач хирургических вмешательств обязательным является оптимальное направление наблюдения. Это означает, что хирург или клиницист должны иметь возможность наблюдать каждую деталь, необходимую для корректного применения интракардиальных устройств или других инструментов. Следовательно, необходимо выбрать соответствующий угол наблюдения, чтобы иметь возможность оптимизировать изображение для клинициста во время инвазивной процедуры. Таким образом, необходимо настроить устройство формирования рентгеновского изображения так, чтобы можно было реализовать желательный угол наблюдения.
Например, крупными сосудами коронарного кровообращения являются левый главный коронарный сосуд, который разделяется на левую переднюю нисходящую артерию и огибающие ветви, и правая главная коронарная артерия. Левая и правая коронарные артерии начинаются у основания аорты от отверстий, называемых устьями коронарных артерий, расположенных позади створок аортального клапана. Во время предусматривающих вмешательство лечений аорты, например установки стента, очистки устьев, необходимо предотвратить закупоривание устьев при помощи стента, который следует установить.
В US 6424731 B1 раскрыт способ управления устройством получения рентгеновского изображения, предоставляющий возможность автоматически отслеживать в режиме реального времени направление наблюдения на трехмерном представлении сосуда, подлежащего обследованию. Кроме того, этот способ обеспечивает предупреждение столкновений с телом пациента за счет того, что он позволяет прогнозировать геометрические параметры, которые физически невозможны без столкновения.
Кроме того, в US 2002/0006185 A1 раскрыт способ автоматического позиционирования устройства получения рентгеновского изображения, в котором определяется первое направление, а направление наблюдения вычисляется так, чтобы качество изображения было лучше того, которое было бы получено с направления наблюдения, параллельного первому направлению.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Как описано выше, во время хирургических воздействий необходим выбор оптимального направления наблюдения для соответствующего реального визуального контроля. Следовательно, для этого следует адаптировать геометрические параметры для устройства получения рентгеновского изображения, создающего двумерные рентгеновские изображения. Как известно, применение устройства получения рентгеновского изображения с С-дугой означает, что геометрия С-дуги должна быть установлена соответствующим образом. Обычно геометрия С-дуги для отслеживания заданного направления наблюдения во время инвазивного воздействия адаптируется посредством ручных управляющих вводов на пользовательском интерфейсе, что может быть утомительным в течение инвазивной процедуры. Также, регулировка направления наблюдения во время хирургического вмешательства приводит к излишнему облучению пациента рентгеновским излучением.
Более того, на корректировке угла наблюдения устройства получения рентгеновского изображения может сказаться параллакс. Параллакс определяется как кажущееся смещение объекта, наблюдаемого по двум разным линиям визирования. Он может быть измерен по углу отклонения между этими двумя линиями. Объекты, расположенные вблизи наблюдателя или источника радиоактивного излучения, соответственно, вызывают больший параллакс, чем более отдаленные объекты, когда они наблюдаются с разных позиций. В природе этот параллакс приводит к возможности людям или животным определять расстояние, наблюдая объект по двум разным линиям визирования. Обычно, поскольку рентгеноскопические изображения являются двумерными, этот параллакс может повлиять на качество изображения ввиду неточности воспроизведения или представления длин объекта на реальных изображениях.
Следовательно, может иметься потребность в способе позиционирования устройства получения рентгеновского изображения, обеспечивающего оптимальное направление наблюдения на патологию, которую следует контролировать во время хирургического воздействия.
Также может иметься потребность в способе позиционирования устройства получения рентгеновского изображения, предоставляющем выбор по меньшей мере одного оптимального направления наблюдения для патологической анатомической структуры в трехмерном представлении и автоматическую корректировку устройства получения рентгеновского изображения, чтобы обеспечить эти заданные углы наблюдения.
Более того, может иметься потребность в способе позиционирования устройства получения рентгеновского изображения, обеспечивающем минимизацию или полное исключение параллакса реальных рентгеновских изображений.
Эти потребности могут быть реализованы при помощи способа позиционирования устройства получения рентгеновского изображения и медицинской системы визуализации, содержащей устройство получения рентгеновского изображения, элементом компьютерной программы для осуществления способа и машиночитаемым носителем в соответствии с независимыми пунктами формулы изобретения.
Различные примерные и предпочтительные варианты осуществления настоящего изобретения описаны в зависимых пунктах формулы изобретения.
Для дальнейшего описания настоящего изобретения положим, что существует трехмерное восстановленное изображение патологической анатомической структуры, подлежащей обследованию. Обычно это трехмерное восстановленное изображение получают перед операцией одним или несколькими способами, хорошо известными специалистам. Это восстановление может быть реализовано на базе рентгеновских изображений, полученных на устройстве получения рентгеновского изображения с С-дугой с нескольких направлений наблюдения. Альтернативно для этой цели можно использовать КТ- или МР-сканирование, или подобное для диагностических целей и планирования лечения. Однако предмет настоящего изобретения не ограничивается типом получения трехмерного изображения структуры.
В предположении наблюдаемости патологической анатомической структуры в наборе трехмерных данных, согласно первому аспекту, способ согласно настоящему изобретению предоставляет возможность построения плоскости, проходящей через патологическую анатомическую структуру, которая может быть аортальным клапаном, шунтом и т.д. Плоскость пересекает патологическую анатомическую структуру. Эта плоскость может далее упоминаться как плоскость отсчета, поскольку, как описано далее, выбор направлений наблюдения задается относительно этой плоскости. Затем на этой плоскости в середине патологической анатомической структуры определяется центральная точка, например геометрический центр области пересечения плоскости отсчета с патологической анатомической структурой. Далее можно задать оптимальное направление наблюдения относительно этой плоскости отсчета и центральной точки внутри патологической анатомической структуры.
Оптимальное направление наблюдения можно задать относительно плоскости отсчета, которая может быть поддержана заданием нормального вектора и ряда тангенциальных векторов. Нормальный вектор может быть задан как вектор через центральную точку патологической анатомической структуры и проходящий перпендикулярно плоскости. Тангенциальный вектор может быть вектором через центральную точку, проходящим тангенциально к плоскости. В последнем случае вектором может быть любой вектор на плоскости, проходящий через центральную точку этой плоскости.
Основная идея способа по настоящему изобретению заключается в том, что выбор одного или более оптимальных направлений наблюдения по набору трехмерных данных можно сделать заранее, до хирургического вмешательства. Это может выполняться, рассматривая трехмерное представление патологической анатомической структуры на экране отдельного вычислительного устройства или вычислительного блока, входящего в состав устройства получения рентгеновского изображения. Поворачивая и/или перемещая это представление, можно найти наилучшие направления наблюдения для хирургического вмешательства. При необходимости проведения более одного хирургического вмешательства можно выбрать различные направления наблюдения, привязанные к плоскости отсчета, нормальному и тангенциальным векторам. Кроме того, можно также сохранить более одного направления наблюдения, чтобы с разных сторон контролировать процесс одного вмешательства.
Преимущество задания направления наблюдения относительно плоскости отсчета по тангенциальным векторам как направлениям наблюдения устройства получения рентгеновского изображения заключается в возможности точного размещения внутрисердечного устройства, как например, стента аортального клапана в патологической области. Соответственно, направление наблюдения в перпендикулярном направлении, в направлении нормального вектора к плоскости отсчета, может быть полезно для размещения устройства закрытия дефекта межпредсердной перегородки или чего-либо подобного.
Например, хирург проверяет по набору трехмерных данных, с каких направлений можно получить оптимальный вид на патологическую анатомическую структуру в тот момент, когда стент необходимо раскрыть в аорте. Считается обязательным, чтобы этот стент не закрывал никакое устье. Следовательно, хирург может выбрать такое направление наблюдения, с которого стент и аорта четко видны в течение всего времени, пока стент продвигается в аорте. Тангенциальные векторы, описанные ранее, обеспечивают такое оптимальное направление наблюдения. Следовательно, можно гарантировать, что ни одно устье не закрыто никаким сосудом. В результате, стент может быть установлен идеально.
Один аспект настоящего изобретения обеспечивает возможность хранения этих запланированных оптимальных направлений наблюдения для хирургического вмешательства в запоминающем устройстве, которое подключено к устройству обработки данных, включенного в состав устройства получения рентгеновского изображения. Таким образом, можно извлечь все оптимальные направления наблюдения соответствующей командой в устройстве обработки данных.
Геометрические параметры устройства получения рентгеновского изображения, например координаты и угол источника рентгеновского излучения и рентгеновского луча, а также координаты и угол модуля детектирования рентгеновского излучения, могут управляться устройством обработки данных или отдельным устройством управления. Тем самым устройство получения рентгеновского изображения автоматически отслеживает любое выбранное оптимальное направление наблюдения.
Прежде чем воспользоваться возможностью применения оптимального направления наблюдения во время хирургического вмешательства, необходимо установить соответствие между запланированной системой отсчета, которая представляет оптимальное направление наблюдения, системой отсчета устройства получения рентгеновского изображения и интраоперационного пространства пациента, которое зависит от положения пациента. Это можно сделать по алгоритму автоматической регистрации или через процесс ручной регистрации.
Например, регистрация трахеи в наборе трехмерных данных выполняется автоматическим сегментированием, а определение ориентации трахеи по двум рентгеновским изображениям, полученным в устройстве получения рентгеновского изображения под разными углами, выполняется вручную. Таким образом, набор трехмерных данных и реальные двумерные рентгеновские изображения совмещаются друг с другом.
Следует отметить, что процесс регистрации является внутренне присущим, если набор трехмерных данных, используемых для планирования, получен практически оперативно устройством получения рентгеновского изображения.
При осуществлении способа по настоящему изобретению, содержащему вышеупомянутые аспекты, могут быть достигнуты некоторые преимущества. Можно предотвратить неверное расположение чрескожных устройств или других медицинских инструментов. Планированием оптимального направления наблюдения перед хирургическим вмешательством можно получить оптимальное направление наблюдения для всей процедуры хирургического вмешательства. Следовательно, следует считать невозможным проведение хирургического вмешательства с неоптимальным направлением наблюдения, при котором у хирурга может сложиться неверное представление о корректном воздействии, корректной установке внутрисердечных устройств или тому подобном. Таким образом, способ по настоящему изобретению создает очевидные удобства для хирургических вмешательств.
Более того, осуществление способа по настоящему изобретению обеспечивает уменьшение воздействия рентгеновского излучения на тело пациента. Может быть излишним корректировать устройство получения рентгеновского изображения несколько раз во время хирургического вмешательства там, где реальные рентгеновские изображения не используются для навигации (направления) медицинских инструментов. Способ автоматической корректировки устройства получения рентгеновского изображения по настоящему изобретению всегда обеспечивает оптимальное направление наблюдения. Следовательно, процесс вмешательства ускоряется, и, таким образом, время облучения рентгеновским излучением сокращается.
По преимущественному варианту осуществления настоящего изобретения плоскость отсчета устанавливается в наборе трехмерных данных автоматически. Это может быть выполнено расположением плоскости в патологической анатомической структуре, подлежащей обследованию, с минимизацией среднего расстояния от всех точек траектории до плоскости.
В этом контексте следует отметить, что патологическая анатомическая структура, подлежащая обследованию, может быть характеризована контуром патологии, которая представляет замкнутую траекторию в трехмерном пространстве. Например, для шунта это минимальный контур вокруг отверстия, а для сердечных клапанов это минимальный контур, который содержит створки клапана. Этот контур может быть определен сегментированием патологической анатомической структуры так, чтобы можно было реализовать алгоритм построения плоскости через траекторию, заданную контуром.
Альтернативно плоскость может быть установлена вручную. Это может быть реализовано пользователем через соответствующее устройство ввода данных, которое подсоединено к графическому пользовательскому интерфейсу, отображающему трехмерное изображение патологической анатомической структуры. Пользователь может позиционировать плоскость отсечения или указать три трехмерные точки внутри патологической анатомической структуры, которых достаточно для указания пространственного положения плоскости. Для этих целей набор трехмерных данных может быть визуализирован через графический пользовательский интерфейс на экране устройства получения рентгеновского изображения или через отдельное вычислительное устройство, подключенное к устройству получения рентгеновского изображения, или может быть адаптирован для хранения этой информации в запоминающем устройстве. Трехмерные изображения можно поворачивать или перемещать.
В предпочтительном варианте осуществления настоящего изобретения на плоскости отсчета строится центральная точка, которая может лежать в середине патологической анатомической структуры. Например, центральная точка может быть задана как точка на плоскости, которая расположена близко к истинной центральной точке, которая может быть представлена центром тяжести области, ограниченной контуром патологии. Она может быть задана усреднением координат контура патологии или альтернативно она может быть также установлена пользователем через устройство ввода и графический пользовательский интерфейс.
В другом предпочтительном варианте осуществления настоящего изобретения задается нормальный вектор к плоскости отсчета. Нормальный вектор проводится от вышеуказанной точки перпендикулярно плоскости отсчета.
Указывается также набор тангенциальных векторов, причем все они располагаются на плоскости и исходят от центральной точки.
Далее, оптимальные направления наблюдения выбираются из направлений нормального вектора и набора тангенциальных векторов. Это означает, что для выбранного нормального или тангенциального вектора сфера наблюдения рентгеновской системы такова, что этот относительный нормализованный нормальный или тангенциальный вектор присутствует в наборе нормализованных векторов, выходящих из фокального пятна источника рентгеновского излучения к детектору рентгеновского излучения.
В предпочтительном варианте осуществления настоящего изобретения устройство получения рентгеновского изображения автоматически отслеживает выбранное оптимальное направление наблюдения, сопровождая этот процесс последовательной корректировкой трехмерного изображения и регистрацией. Например, когда хирург выбирает сохраненное оптимальное направление наблюдения на соответствующем пользовательском интерфейсе или подобном ему, устройство получения рентгеновского изображения автоматически сдвигается, чтобы соответствовать этому оптимальному направлению наблюдения; трехмерное изображение патологической анатомической структуры корректируется, и оба изображения затем регистрируются, чтобы автоматически скорректировать реальное навигационное изображение для хирурга; все это предпочтительно осуществить простым нажатием кнопки или выбором сохраненного направления наблюдения на сенсорном экране или другом устройстве ввода-вывода.
В этом контексте отслеживание изображения прекращается для корректировки геометрических параметров устройства получения рентгеновского изображения, как, например, координат и углов детектора рентгеновского излучения, источника рентгеновского излучения, рентгеновского луча и т.д., которые сильно зависят от типа рентгеновских аппаратов. На практике применяют рентгеновские аппараты с С-дугой, в которых процесс отслеживания включает корректировку по меньшей мере трех углов: поворота, наклона, поворота L-штатива и, может быть, корректировку положения рамы С-дуги.
В еще одном предпочтительном варианте осуществления настоящего изобретения процесс отслеживания устройства получения рентгеновского изображения включает компенсацию ошибки параллакса. Таким образом, принимается во внимание параллакс, который влияет на вид в перспективе рентгеновского изображения. По существу такая поправка на параллакс может быть выполнена, как указано далее на примере устройства получения рентгеновского изображения с С-дугой. Фокальное пятно детекторного источника расположено на фиксированном расстоянии от изоцентра геометрии С-дуги. Сфера, описанная вокруг изоцентра радиусом, равным этому расстоянию, изображает все возможные положения фокального пятна детектора. Как описано выше, оптимальное направление наблюдения задается при помощи вектора и центральной точки патологии. Прямая линия может задаваться при помощи этой центральной точки и вектора оптимального направления наблюдения. Точка пересечения этой линии с ранее описанной сферой может задать оптимальное положение фокального пятна.
Еще одним аспектом настоящего изобретения является медицинская система визуализации, в частности система с С-дугой или система компьютерной томографии. Медицинская система визуализации содержит устройство обработки данных, адаптированное для проведения стадий вышеописанного способа.
Еще одним аспектом настоящего изобретения является машиночитаемый носитель, на котором хранится компьютерная программа для автоматизированного позиционирования устройства получения рентгеновского изображения. Компьютерная программа, исполняемая процессором обработки данных, адаптирована для управления примерными вариантами осуществления описанного выше способа.
Еще одним аспектом настоящего изобретения является элемент компьютерной программы для обеспечения автоматизированного позиционирования устройства получения рентгеновского изображения. Элемент компьютерной программы, исполняемый процессором обработки данных, адаптирован для управления примерными вариантами осуществления описанного выше способа.
Элемент компьютерной программы может быть реализован как машиночитаемый командный код на любом подходящем языке программирования, как например, JAVA, C++, и может быть сохранен на машиночитаемом носителе (на съемном диске, в энергозависимой или энергонезависимой памяти, во встроенной памяти и т.д.). Командный код исполняется компьютером или другим программируемым устройством для выполнения предназначенных функций. Компьютерная программа может быть доступна из сети, как например Всемирная паутина, из которой она может быть загружена.
Также, существующие системы наблюдения медицинских изображений можно модернизировать новым программным обеспечением, и оно, при исполнении процессором, приводит к выполнению системой этапов описанного выше способа по настоящему изобретению.
Следует заметить, что признаки и побочные эффекты настоящего изобретения описаны со ссылкой на разные варианты осуществления изобретения. Однако из вышеупомянутого и последующего описания специалист придет к выводу, что, если не оговорено другое, в дополнение к любому сочетанию признаков, принадлежащих одному варианту осуществления, любые сочетания признаков, относящихся к разным вариантам осуществления или к способу обработки, также считаются раскрытыми в этой заявке.
Вышеуказанные и последующие объекты настоящего изобретения очевидны из примеров варианта осуществления, описываемых далее и объяснены со ссылкой на примеры варианта осуществления. Для дополнительного обоснования и более полного понимания настоящего изобретения далее следует более подробное описание изобретения со ссылкой на примеры варианта осуществления, которыми данное изобретение не ограничивается. Одинаковые или похожие компоненты на разных чертежах обеспечиваются одинаковыми ссылочными номерами. Иллюстрации на чертежах схематичны и не в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
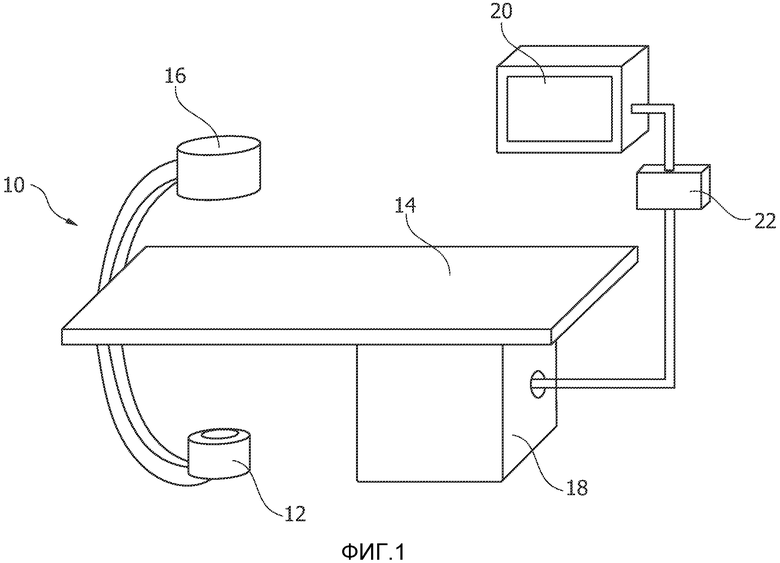
На фиг. 1 показана система получения рентгеновского изображения по настоящему изобретению.
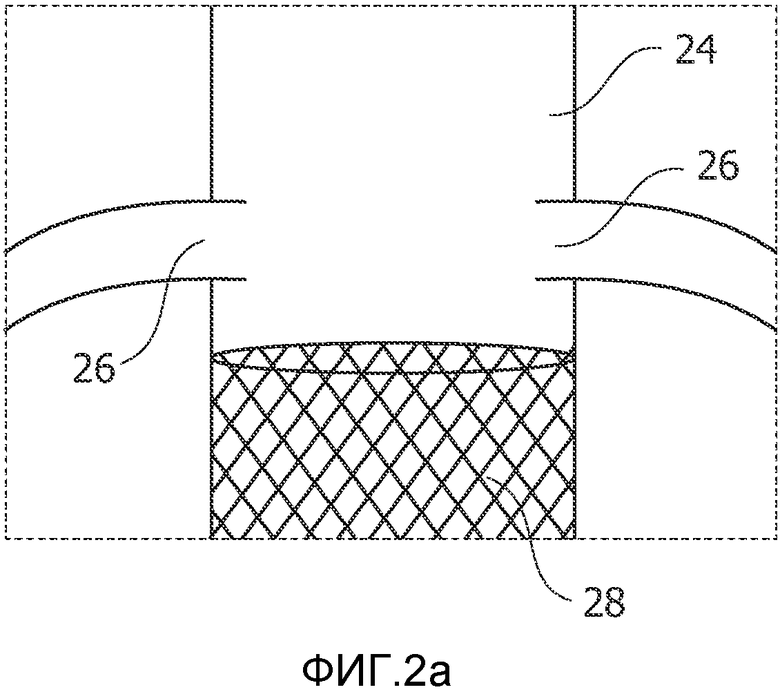
На фиг. 2a и 2b показаны перпендикулярный вид и вид под углом органа и чрескожного устройства.
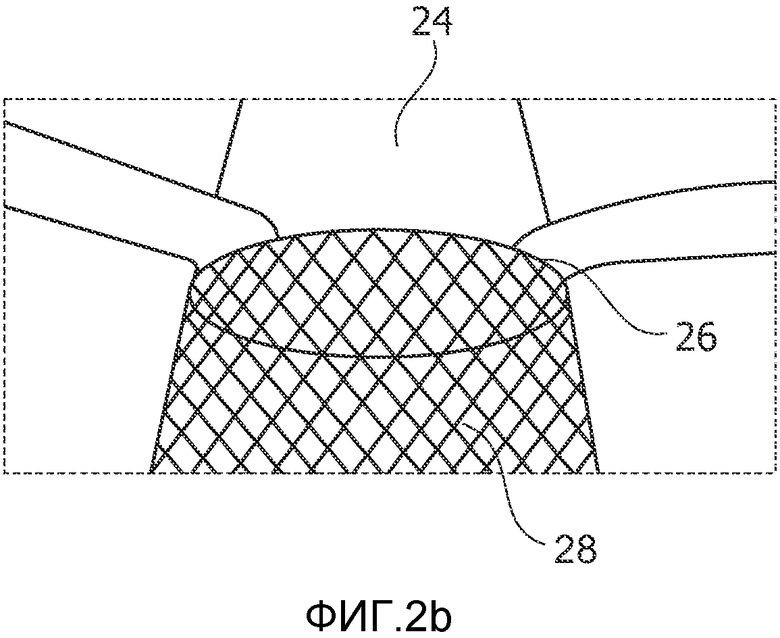
На фиг. 3 показана плоскость относительно патологии, подлежащей обследованию.
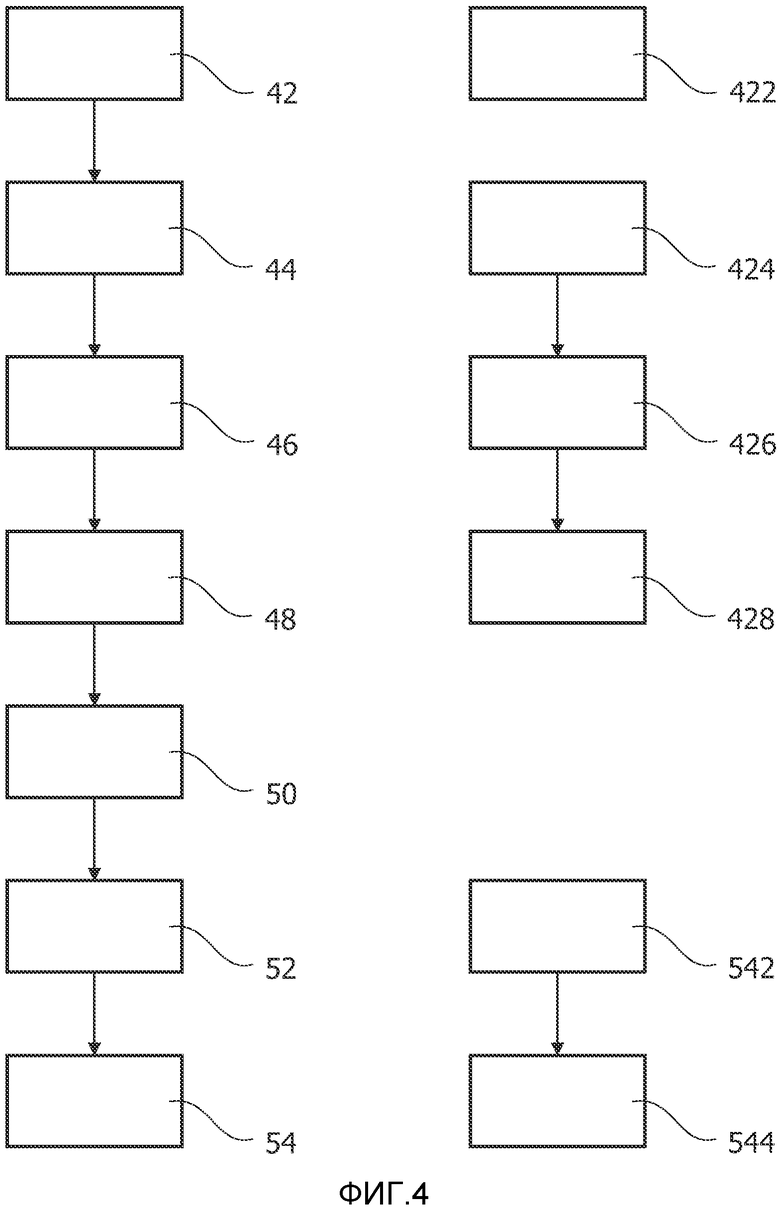
На фиг. 4 показан способ по настоящему изобретению.
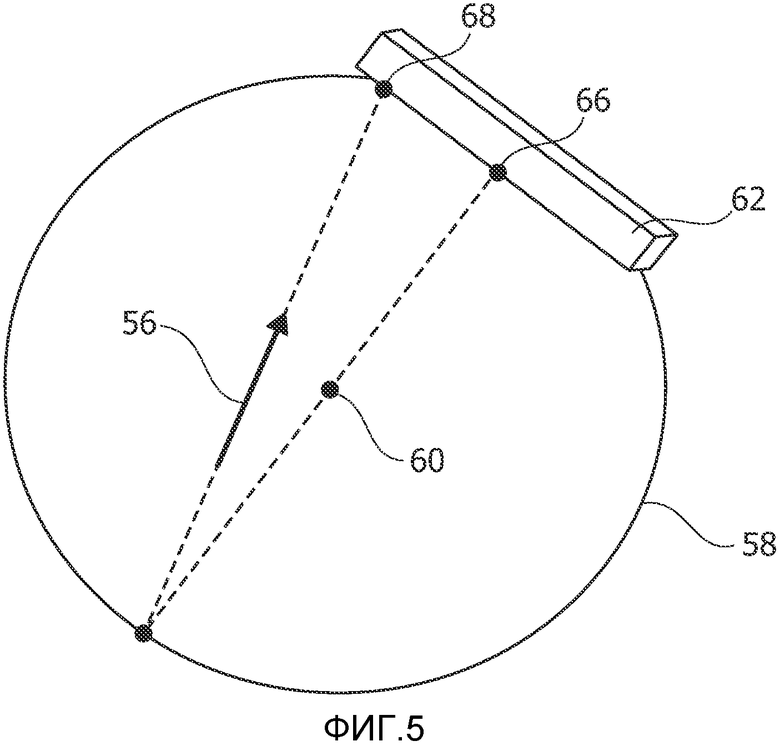
На фиг. 5 схематично показана компенсация параллакса.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг. 1 схематично показана система 10 получения рентгеновского изображения с системой наблюдения медицинских изображений для автоматизированного позиционирования устройства получения рентгеновского изображения.
Система 10 получения рентгеновского изображения содержит устройство получения рентгеновского изображения с источником рентгеновского излучения 12, обеспечивающего генерацию рентгеновского излучения. Стол 14 предназначен для расположения объекта, подлежащего обследованию. Далее, модуль 16 детектирования рентгеновского изображения расположен напротив источника излучения 12. В процессе облучения обследуемый объект расположен между источником излучения 12 и модулем 16 детектирования. Последний передает данные на устройство обработки данных или вычислительное устройство 18, которое соединено как с модулем 16 детектирования рентгеновского изображения, так и с источником рентгеновского излучения 12. Вычислительное устройство 18 расположено, для примера, под столом 14 для экономии места в кабинете обследования. Понятно, что оно также может быть расположено в другом месте, например в другой комнате или другой лаборатории. Более того, дисплей 20 расположен вблизи стола 14 для вывода информации лицу, работающему с системой получения изображения, который может быть клиницистом, как например, кардиологом или кардиохирургом. Предпочтительно, чтобы дисплей 20 крепился подвижно для возможности индивидуальной установки в зависимости от условий обследования. Интерфейс 22 расположен также удобно для ввода информации пользователем.
Изображения в модуле 16 детектирования изображения создаются в основном облучением объекта рентгеновскими лучами, а затем указанные изображения обрабатываются в вычислительном устройстве 18. Отмечено, что в указанном примере представлен рентгеновский прибор так называемого С-типа. Рентгеновский прибор содержит дугу в виде буквы С, где модуль 16 детектирования расположен на одном конце С-дуги, а источник рентгеновского излучения 12 - на противоположном конце С-дуги. С-дуга закреплена подвижно и может поворачиваться вокруг интересующего объекта, расположенного на столе 14. Другими словами, возможно получение изображений с разных направлений наблюдения.
Вычислительное устройство 18 может быть приспособлено для осуществления способа по настоящему изобретению и, следовательно, может рассматриваться как устройство обработки данных для автоматизированного позиционирования устройства получения рентгеновского изображения или являться таковым. Таким образом, предусмотрены процессор обработки данных и предпочтительное устройство хранения оптимальных направлений наблюдения, а также соответствующее программное обеспечение, которое выводит один программный элемент для автоматизированного позиционирования устройства получения рентгеновского изображения, адаптированный для управления типовыми вариантами осуществления вышеупомянутого способа. Программное обеспечение может загружаться в вычислительное устройство 18 при помощи машиночитаемого носителя или по сети и может быть реализовано в виде совершенно новой или обновленной операционной системы.
На фиг. 2a представлена аорта 24, содержащая два устья 26. В течение хирургического процесса стент 28 может быть установлен в аорте 24. Как видно из фиг. 2a, надо быть осторожным, чтобы стент 28 не закрыл устья 26. Следовательно, перпендикулярное направление наблюдения аорты 24, что означает наблюдение в строго перпендикулярном направлении к стенке аорты, можно считать оптимальным направлением наблюдения.
На фиг. 2b представлено слегка смещенное от перпендикуляра направление наблюдения той же аорты 24 с двумя устьями 26. Очевидно, что по изображению на фиг. 2b гораздо труднее наблюдать за установкой стента 28, потому что устья 26 не полностью видны, когда стент 28 почти занимает свое конечное положение. Следовательно, направление наблюдения по фиг. 2b не может считаться оптимальным, поскольку с этого направления трудно предотвратить закрывание отверстий стентом 28. Хирург должен принять решение, правильно ли установлен стент или нет, и таким образом превзойти нежелательный уровень неопределенности.
Примеры, взятые из фиг. 2a и 2b, показывают, каким образом плоскость отсчета может быть установлена по отношению к патологии, подлежащей обследованию.
На фиг. 3 показана аорта 24 вместе с устьями 26. По способу настоящего изобретения плоскость 30 проходит через контур 32 патологии, которая в этом случае представляет собой аорту 24 в области отверстий 26.
Плоскость 30 устанавливается таким образом, чтобы выполнялось условие минимальности расстояний между всеми точками контура 32 и плоскостью 30. Чтобы получить контур 32, можно учесть сегментированные подобласти; сегментация может быть получена автоматически методами, известными специалисту. Контур 32 следует выбрать так, чтобы, например, область аорты в плоскости поперечного сечения была минимальна.
На плоскости 30 построена центральная точка 34. Эта центральная точка 34 может быть определена как геометрический центр или центр тяжести области, ограниченной контуром 32. Альтернативно, хирург может выбрать собственную центральную точку 34. Хирург также может выбрать и плоскость 30 вручную, например, определяя три трехмерные точки 36, которые определяют плоскость 30 в трехмерном пространстве.
От центральной точки 34 создается нормальный вектор 38, перпендикулярный плоскости 30. В плоскости 30, начиная от центральной точки 34, проходит ряд тангенциальных векторов 40.
Для приведенного примера направление наблюдения, параллельное тангенциальному вектору 40, можно считать оптимальным, хотя в других случаях (например, шунт в стенке сердца) оптимальным можно считать направление наблюдения, параллельное нормальному вектору 38.
Оптимальное тангенциальное направление можно выбрать поворотом трехмерного изображения патологии, чтобы найти направление наблюдения, которое считается оптимальным.
Ряд оптимальных направлений наблюдения можно затем сохранить в устройстве хранения и извлекать их путем ввода соответствующих данных через пользовательский интерфейс или устройство ввода.
Далее, подробно описан способ по настоящему изобретению со ссылкой на фиг. 4. После задания/создания 42 плоскости и задания/создания 44 центральной точки на плоскости в зависимости от контура 32 патологии, подлежащей обследованию, можно найти и затем сохранить 46 в устройстве хранения оптимальные направления наблюдения.
Создание плоскости отсчета 30 может, содержать признак расположения 422 плоскости отсчета таким образом, чтобы среднее расстояние от точек траектории объекта до плоскости отсчета было минимизировано.
Более того, создание плоскости отсчета 30 может включать сегментирование 424 объекта, подлежащего обследованию, на под-объемы, определение 426 контура сегментированного под-объема и расположение 428 плоскости отсчета таким образом, чтобы среднее расстояние от траектории, заданной контуром по меньшей мере одного сегментированного под-объема было минимальным.
Для того чтобы полученный трехмерный набор данных соответствовал пациенту, реально позиционированному на столе устройства получения рентгеновского изображения, запланированные и патологические области регистрируют 48.
Во время вмешательства можно выбрать 50 оптимальные направления наблюдения, которые устройство получения рентгеновского изображения отслеживает 52, что также можно назвать корректировкой геометрии устройства получения рентгеновского изображения.
Для того чтобы предотвратить изменения длины и ошибки при наблюдении в перспективе, выполняется 54 компенсация параллакса.
Компенсация параллакса может включать этапы: формирование 542 сферы 58 вокруг изоцентра 60 устройства получения рентгеновского изображения, причем радиус сферы равен расстоянию между центром 60 устройства получения рентгеновского изображения и источником рентгеновского излучения 12; определение 544 пересечения между прямой линией, проходящей через центральную точку 60 плоскости отсчета 30 в оптимальном направлении 56 наблюдения, и сферы 58; коррекция 52 геометрических параметров устройства получения рентгеновского изображения для совмещения пересечения с фокальным пятном источника рентгеновского излучения.
На фиг. 5 схематично показана компенсация параллакса. Вектор 56 определяет оптимальное направление наблюдения, которое доходит до детектора 62; около детектора 62 построена сфера 58, которая проходит через все возможные фокальные пятна источника рентгеновского излучения. Детектор неточно направлен по вектору 56 заданного направления наблюдения. Вместо этого детектор 62 сдвинут в положение, направленное на пересечение 64 вектора 56, сферы 58 и прямой, проходящей от центра 66 детектора 62 через изоцентр 60 сферы 58. Таким образом, вектор 58 оптимального направления наблюдения проектируется в точку 68 на детекторе 62 рентгеновского излучения и параллакс соответственно компенсируется.
При помощи способа и соответствующего клинического процесса по настоящему изобретению обеспечивается эффективный метод определения оптимального направления наблюдения. Из набора трехмерных данных клиницист или хирург может спланировать вмешательство и установить оптимальные направления наблюдения. Их можно определить по нормальному и тангенциальным векторам на плоскости, которая согласована с контуром патологического сегмента, и затем сохранить, чтобы извлечь позже во время хирургического вмешательства. Следовательно, этот способ сокращает периоперационную фазу и уменьшает воздействие рентгеновского излучения на пациента.
Несмотря на то, что данное изобретение проиллюстрировано и подробно представлено в чертежах и вышеизложенном описании, такое иллюстрирование и описание следует рассматривать как иллюстративное или примерное, но не ограничительное; данное изобретение не ограничено описанными вариантами осуществления.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
10 - система получения рентгеновского изображения
12 - источник рентгеновского излучения
14 - стол
16 - модуль детектирования рентгеновского изображения
18 - вычислительное устройство
20 - дисплей
22 - интерфейс
24 - аорта
26 - устье
28 - стент
30 - плоскость отсчета
32 - контур
34 - центральная точка
36 - точка, определяющая плоскость
38 - нормальный вектор
40 - тангенциальный вектор
42 - задание плоскости
422 - расположение плоскости отсчета
424 - сегментирование объекта
426 - определение контура
428 - расположение плоскости отсчета
44 - задание центра
46 - хранение
48 - регистрация
50 - выбор
52 - отслеживание
54 - проведение поправки 542 на параллакс генерируемой сферы
544 - определение пересечения
56 - вектор оптимального направления наблюдения
58 - сфера
60 - изоцентр
62 - детектор рентгеновского излучения
64 - пересечение
66 - центр детектора рентгеновского излучения
68 - точка на детекторе рентгеновского излучения
Группа изобретений относится к способам и системам для позиционирования устройства получения рентгеновского изображения. В способе создаются плоскость отсчета, пересекающая трехмерное изображение объекта, центральная точка в пересечении объекта, нормальный вектор к плоскости отсчета и по меньшей мере один тангенциальный вектор на плоскости отсчета. После этого плоскость отсчета, система отсчета объекта и система отсчета устройства получения рентгеновского изображения регистрируются. Задается по меньшей мере одно направление наблюдения, получаемое из нормального вектора и/или по меньшей мере из одного тангенциального вектора, причем устройство получения рентгеновского изображения регулируется по геометрическим параметрам устройства получения рентгеновского изображения. Использование изобретения обеспечивает автоматическое позиционирование устройства получения рентгеновского изображения и гораздо более быструю корректировку реально сопровождающего изображения, результатом чего является меньшее воздействие облучением. 4 н. и 4 з.п. ф-лы, 5 ил.
1. Способ позиционирования устройства получения рентгеновского изображения, содержащего источник (12) рентгеновского излучения и детектор (16) рентгеновского излучения, причем источник (12) рентгеновского излучения выполнен с возможностью испускания рентгеновского излучения на объект в регулируемом направлении наблюдения, зависящем от геометрических параметров устройства получения рентгеновского изображения, содержащий этапы:
создания (42) прямой плоскости (30) отсчета, пересекающей трехмерное представление объекта;
создания (44) центральной точки (34) в качестве геометрического центра области пересечения трехмерного представления объекта на плоскости (30) отсчета;
создания нормального вектора (38) и по меньшей мере одного тангенциального вектора (40), причем нормальный вектор задан как вектор через центральную точку, проходящий перпендикулярно плоскости (30) отсчета, и причем тангенциальный вектор задан как вектор через центральную точку, проходящий тангенциально к плоскости (30) отсчета;
задания по меньшей мере одного направления наблюдения исходя из нормального вектора (38) и/или по меньшей мере одного тангенциального вектора (40);
регистрации (48) плоскости (30) отсчета, системы отсчета трехмерного представления объекта и системы отсчета устройства получения рентгеновского изображения; и
коррекции (52) геометрических параметров устройства получения рентгеновского изображения согласно оптимальному направлению наблюдения, выбранному из по меньшей мере одного заданного направления наблюдения.
2. Способ по п. 1, в котором создание (42) плоскости (30) отсчета включает функцию расположения (422) плоскости отсчета таким образом, что среднее расстояние от точек траектории трехмерного представления объекта до плоскости отсчета минимизируется.
3. Способ по п. 1 или 2, дополнительно содержащий этапы
сегментирования (424) трехмерного представления объекта на под-объемы;
определения (426) контура сегментированного под-объема;
расположение (428) плоскости отсчета таким образом, что среднее расстояние от траектории, заданной контуром по меньшей мере одного сегментированного под-объема минимизируется.
4. Способ по п. 1 или 2, дополнительно содержащий этап хранения (46) оптимальных направлений наблюдения в устройстве хранения относительно нормального (38) и по меньшей мере одного тангенциального вектора (40).
5. Способ по п. 1 или 2, дополнительно содержащий выполнение компенсации (54) параллакса посредством этапов
формирования (542) сферы (58) вокруг центра устройства получения рентгеновского изображения, причем радиус сферы равен расстоянию между центром (60) устройства получения рентгеновского изображения и источником (12) рентгеновского излучения;определения (544) пересечения между прямой линией, проходящей через центральную точку (60) плоскости (30) отсчета в оптимальном направлении (56)наблюдения, и сферой (58);
корректировки (52) геометрических параметров устройства получения рентгеновского изображения для обеспечения совпадения пересечения с фокальным пятном источника рентгеновского излучения.
6. Устройство обработки данных (18) для позиционирования устройства получения рентгеновского изображения, содержащее процессор обработки данных, который адаптирован для осуществления способа по п. 1, и устройство хранения для сохранения и извлечения выбранных направлений наблюдения.
7. Система получения медицинских изображений, содержащая устройство (18) обработки данных по п. 6.
8. Машиночитаемый носитель, на котором хранится компьютерная программа для позиционирования устройства получения рентгеновского изображения, причем компьютерная программа, при исполнении процессором данных, адаптирована для управления способом по п. 1.
| US 6249713 B1, 19.06.2001 | |||
| Устройство для маркировки изделий | 1983 |
|
SU1129663A1 |
| Устройство для ввода информации | 1981 |
|
SU972490A1 |
| US 2002045817 A1, 18.04.2002 | |||
| US 2004019264 A1, 29.01.2004 | |||
| Прибор для стерилизации молока в бутылках | 1929 |
|
SU25391A1 |

