Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке для обнаружения позиции катушки, допускающим подачу электрической мощности с учетом колебания зазора между катушками беспроводной подачи мощности.
Уровень техники
[0002] Традиционно, предлагается устройство помощи при парковке в беспроводной подаче мощности (см. патентный документ 1). В патентном документе 1, изображение, захваченное посредством камеры заднего вида, отображается, чтобы направлять транспортное средство, когда транспортное средство откатывается назад для парковки. После того, как модуль на стороне земли не захватывается в изображении, транспортное средство направляется посредством вычисления и отображения величины нарушения совмещения позиции между модулем на стороне земли и модулем на стороне транспортного средства, в соответствии со значением напряжения, измеряемым посредством модуля на стороне транспортного средства.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Патент (Япония) номер 5377119
Сущность изобретения
Техническая задача
[0004] Между прочим, предусмотрен допустимый диапазон для подачи мощности (допустимый диапазон подачи мощности) в величине нарушения совмещения позиции. Допустимый диапазон подачи мощности в значительной степени зависит от расстояния (т.е. зазора) в вертикальном направлении между модулем на стороне земли и модулем на стороне транспортного средства. Поскольку зазор изменяется вследствие проведения посадки и высадки пассажира или загрузки и разгрузки груза, зазор может изменяться из состояния, в котором мощность может подаваться, на состояние, в котором мощность не может подаваться. С другой стороны, если диапазон колебания зазора переоценивается, допустимый диапазон подачи мощности не может широко задаваться, и в силу этого удобство парковки становится низким.
[0005] Настоящее изобретение осуществлено в свете вышеуказанной проблемы, и задача настоящего изобретения заключается в том, чтобы предоставлять способ помощи при парковке и устройство помощи при парковке, допускающие расширение допустимого диапазона подачи мощности при беспроводной подаче мощности и в силу этого допускающие повышение удобства парковки.
Решение задачи
[0006] Способ помощи при парковке и устройство помощи при парковке согласно одному аспекту настоящего изобретения включают в себя: измерение первого принимаемого напряжения, сформированного в приемной катушке; и помощь в совмещении между катушками посредством представления пассажиру транспортного средства результата определения того, может или нет подаваться мощность, на основе разности потенциалов, полученной заранее, и первого принимаемого напряжения. Заранее полученная разность потенциалов представляет собой разность потенциалов между вторым принимаемым напряжением приемной катушки, измеряемым, когда совмещение между катушками выполняется до помощи в совмещении между катушками, и третьим принимаемым напряжением приемной катушки, измеряемым после того, как совмещение и подача мощности завершаются.
Преимущества изобретения
[0007] Согласно одному аспекту настоящего изобретения, допустимый диапазон подачи мощности при беспроводной подаче мощности может расширяться, и в силу этого может повышаться удобство парковки.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, показывающей конфигурацию системы беспроводной подачи мощности согласно вариантам осуществления.
Фиг. 2 является схемой, показывающей взаимосвязь между позицией катушки 11 на стороне транспортного средства и допустимым диапазоном 21 подачи мощности в случаях, если, зазор между катушками является маленьким и большим.
Фиг. 3 является схемой в перспективе, показывающей пример внешней формы допустимого диапазона 21 подачи мощности с учетом направления по оси Z.
Фиг. 4 является схемой, показывающей взаимосвязь изменения центральной позиции катушки 11a на стороне транспортного средства и допустимого диапазона 21 подачи мощности в случае колебания зазора от минимального значения (Gmin) до максимального значения (Gmax).
Фиг. 5 является схемой, показывающей взаимосвязь изменения центральной позиции катушки 11a на стороне транспортного средства и допустимого диапазона 21 подачи мощности в случае колебания зазора от позиции t4 до позиции t5.
Фиг. 6A является блок-схемой последовательности операций способа для пояснения работы до начала беспроводной подачи мощности в первом варианте осуществления.
Фиг. 6B является блок-схемой последовательности операций способа для пояснения работы от начала до прекращения беспроводной подачи мощности в первом варианте осуществления.
Фиг. 6C является блок-схемой последовательности операций способа для пояснения работы после прекращения беспроводной подачи мощности в первом варианте осуществления.
Фиг. 7A является схемой, показывающей пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего "N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S13, показанном на фиг. 6A.
Фиг. 7B является схемой, показывающей пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего "N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S13, показанном на фиг. 6A.
Фиг. 7C является схемой, показывающей пример изображения, указывающего то, что мощность может подаваться (изображения, указывающего "O.K.-позицию" (надлежащую позицию)), отображаемого на модуле 5 отображения на этапе S11, показанном на фиг. 6A.
Фиг. 8A является схемой, показывающей другой пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего ("N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S13, показанном на фиг. 6A.
Фиг. 8B является схемой, показывающей другой пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего "N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S13, показанном на фиг. 6A.
Фиг. 8C является схемой, показывающей другой пример изображения, указывающего то, что мощность может подаваться (изображения, указывающего "O.K.-позицию" (надлежащую позицию)), отображаемого на модуле 5 отображения на этапе S11, показанном на фиг. 6A.
Фиг. 9 показывает график, показывающий временное изменение: принимаемого напряжения (второго принимаемого напряжения Vt0, третьего принимаемого напряжения Vt1, первого принимаемого напряжения NOW), измеряемого посредством датчика 8 тока/напряжения; проведения посадки и высадки пассажира(ов) и загрузки и разгрузки груза(ов); и состояния соединения аккумулятора.
Фиг. 10 является концептуальной схемой, показывающей возможность перекрытия между периодом 43 времени для помощи в совмещении между катушками и периодом 41 времени для заблаговременного измерения принимаемого напряжения (Vt0: второго принимаемого напряжения) для следующей помощи в совмещении.
Фиг. 11A является блок-схемой последовательности операций способа для пояснения работы до начала беспроводной подачи мощности во втором варианте осуществления.
Фиг. 11B является блок-схемой последовательности операций способа для пояснения работы от начала до прекращения беспроводной подачи мощности во втором варианте осуществления.
Фиг. 11C является блок-схемой последовательности операций способа для пояснения работы после прекращения беспроводной подачи мощности во втором варианте осуществления.
Фиг. 12A является схемой, показывающей пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего "N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S57, показанном на фиг. 11A.
Фиг. 12B является схемой, показывающей пример изображения, указывающего то, что мощность может подаваться (изображения, указывающего "O.K.-позицию" (надлежащую позицию)), отображаемого на модуле 5 отображения на этапе S59, показанном на фиг. 11A.
Фиг. 12C является схемой, показывающей пример изображения, указывающего то, что мощность может подаваться (изображения, указывающего "O.K.-позицию" (надлежащую позицию)), отображаемого на модуле 5 отображения на этапе S61, показанном на фиг. 11A.
Фиг. 13A является схемой, показывающей другой пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего "N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S57, показанном на фиг. 11A.
Фиг. 13B является схемой, показывающей другой пример изображения, указывающего то, что мощность не может подаваться (изображения, указывающего "N.G.-позицию" (ненадлежащую позицию)), отображаемого на модуле 5 отображения на этапе S59, показанном на фиг. 11A.
Фиг. 13C является схемой, показывающей другой пример изображения, указывающего то, что мощность может подаваться (изображения, указывающего "O.K.-позицию" (надлежащую позицию)), отображаемого на модуле 5 отображения на этапе S61, показанном на фиг. 11A.
Подробное описание вариантов осуществления
[0009] В дальнейшем в этом документе, поясняются варианты осуществления со ссылкой на множество чертежей. Следует отметить, что хотя в дальнейшем в этом документе схематично поясняется конфигурация способа помощи при парковке и устройства помощи при парковке, эти принципиальные схемы могут изображать с чрезмерным увеличением взаимосвязь между толщиной и плоским размером, а также соотношение между размерами по вертикали и горизонтали в плоскости и т.д., чтобы упрощать понимание.
[0010] Первый вариант осуществления
Система беспроводной подачи мощности
Во-первых, со ссылкой на фиг. 1, далее поясняется система беспроводной подачи мощности, к которой применяются способ помощи при парковке и устройство помощи при парковке согласно вариантам осуществления. Фиг. 1 является принципиальной схемой, показывающей схематический вид системы беспроводной подачи мощности, и задается ортогональная система координат трехмерного пространства, в которой плоскость X-Y, включающая в себя ось X и ось Y, представляет собой горизонтальную плоскость, и направление по оси Z представляет собой направление, перпендикулярное горизонтальной плоскости.
[0011] Система беспроводной подачи мощности представляет собой систему, выполненную с возможностью подавать мощность беспроводным способом между катушкой 12 на стороне земли и катушкой 11 на стороне транспортного средства. Более конкретно, система беспроводной подачи мощности представляет собой систему, допускающую подачу мощности беспроводным способом из катушки для передачи мощности (катушки 12 на стороне земли), встраиваемой под дорогой, в приемную катушку (катушку 11 на стороне транспортного средства), смонтированную около нижней поверхности транспортного средства 2, посредством явлений электромагнитной индукции и резонанса, когда транспортное средство остановлено. Поскольку мощность, которая подается, представляет собой мощность переменного тока, мощность преобразуется в мощность постоянного тока посредством преобразователя 13 переменного тока в постоянный и сглаживается посредством модуля 7 сглаживания и затем передается в аккумулятор 10 (включающий в себя аккумуляторную батарею) через датчик 8 тока/напряжения (датчик напряжения) и релейный переключатель 9. Аккумулятор 10 заряжается этой передаваемой мощностью. Толстая стрелка, которая соединяется от катушки 12 на стороне земли к аккумулятору 10 на фиг. 1, указывает поток мощности, которая должна подаваться.
[0012] В качестве информации, указывающей состояние подачи мощности, сигнал, указывающий значение зарядного тока или значение зарядного напряжения, измеряемое посредством датчика 8 тока/напряжения, передается из датчика 8 тока/напряжения в контроллер 4 транспортного средства. Сигнал, указывающий состояние заряда (SOC) или ситуацию оставшейся емкости аккумулятора 10, передается из аккумулятора 10 в контроллер 4 транспортного средства. Контроллер 4 транспортного средства управляет соединением и отсоединением (включением/выключением) релейного переключателя 9 на основе этих передаваемых сигналов и передает информацию в блок 3 источника мощности на стороне земли через устройство 6 беспроводной связи.
[0013] С другой стороны, система беспроводной подачи мощности включает в себя блок 3 источника мощности на стороне земли и катушку 12 на стороне земли, в качестве конфигурации на стороне земли. Блок 3 источника мощности на стороне земли включает в себя: силовой модуль, выполненный с возможностью преобразовывать мощность переменного тока, подаваемую из источника мощности на линии, в переменное напряжение, переменный ток и цикл переменного тока, которые должны использоваться для беспроводной подачи мощности, и передавать преобразованную мощность переменного тока в катушку 12 на стороне земли; контроллер на земле, выполненный с возможностью управлять работой силового модуля; и модуль связи, выполненный с возможностью выполнять беспроводную связь с устройством 6 беспроводной связи, смонтированным в транспортном средстве 2. Катушка 12 на стороне земли подает мощность переменного тока, передаваемую из силового модуля, беспроводным способом в катушку 11 на стороне транспортного средства посредством явлений электромагнитной индукции и резонанса. Сигнал, указывающий состояние подачи мощности и состояние заряда (SOC) и ситуацию оставшейся емкости аккумулятора 10, который передается из устройства 6 беспроводной связи на стороне транспортного средства, принимается посредством модуля связи. Принимаемый сигнал передается в контроллер на земле; и контроллер на земле управляет преобразованием мощности переменного тока, выполняемым посредством силового модуля, и передачей мощности в катушку 12 на стороне земли на основе этого сигнала. Таким образом, система беспроводной подачи мощности может подавать мощность беспроводным способом между катушкой 12 на стороне земли и катушкой 11 на стороне транспортного средства и в силу этого может заряжать аккумулятор 10, смонтированный в транспортном средстве 2.
[0014] Устройство помощи при парковке
После этого поясняется устройство помощи при парковке согласно варианту осуществления, которое должно применяться к системе беспроводной подачи мощности. Чтобы выполнять вышеуказанную беспроводную подачу мощности, необходимо заранее совмещать позицию транспортного средства 2 (в частности, позицию катушки 11 на стороне транспортного средства) относительно катушки 12 на стороне земли. Устройство помощи при парковке помогает в операции совмещения между катушками, т.е. в операции парковки, выполняемой пассажиром транспортного средства 2, который представляет собой пользователя устройства помощи при парковке. Другими словами, способ помощи при парковке и устройство помощи при парковке согласно вариантам осуществления помогают в совмещении между катушками при парковке транспортного средства 2 в месте для парковки, содержащем катушку для передачи мощности (катушку 12 на стороне земли), до подачи мощности беспроводным способом в приемную катушку (катушку 11 на стороне транспортного средства), смонтированную в транспортном средстве 2.
[0015] Более конкретно, устройство помощи при парковке может быть сконфигурировано как часть контроллера 4 транспортного средства. Устройство помощи при парковке измеряет напряжение (принимаемое напряжение), сформированное в катушке 11 на стороне транспортного средства, посредством датчика 8 тока/напряжения, показанного на фиг. 1, когда катушка 12 на стороне земли возбуждается. Принимаемое напряжение увеличивается по мере того, как расстояние между катушкой 12 на стороне земли и катушкой 11 на стороне транспортного средства в трехмерном пространстве уменьшается. Устройство помощи при парковке помогает в совмещении между катушками посредством определения возможности подачи мощности на основе значения принимаемого напряжения и представления результата определения пассажиру транспортного средства 2. Например, изображение, указывающее информацию относительно позиции катушки, отображается на дисплее (модуле 5 отображения), смонтированном в приборной панели транспортного средства 2. Помимо этого, диапазон величины нарушения совмещения позиции между катушками (11, 12), разрешенный для того, чтобы подавать мощность (допустимый диапазон подачи мощности), заранее задается на основе порогового значения (V0: минимального допустимого напряжения) принимаемого напряжения.
[0016] Допустимый диапазон подачи мощности в основном зависит от расстояния в вертикальном направлении (в направлении по оси Z) между катушкой 12 на стороне земли и катушкой 11 на стороне транспортного средства. Расстояние в вертикальном направлении (в направлении по оси Z) между катушкой 12 на стороне земли и катушкой 11 на стороне транспортного средства упоминается как "зазор". Например, частичный чертеж в нижнем левом углу по фиг. 2 является схемой, показывающей катушку 12 на стороне земли и катушку 11 на стороне транспортного средства, когда земля просматривается со стороны транспортного средства 2 вдоль оси Z, и частичный чертеж в верхнем левом углу по фиг. 2 является схемой в поперечном сечении частичного чертежа в нижнем левом углу по фиг. 2 вдоль линии A-A.
[0017] Поскольку коэффициент связи между катушками увеличивается, и эффективность подачи мощности также увеличивается, когда зазор является небольшим, допустимый диапазон 21 подачи мощности в плоскости X-Y также увеличивается. Таким образом, нарушение совмещения позиции между катушками в направлении по оси X или в направлении по оси Y, которое затрагивает подачу мощности, может разрешаться. Например, поскольку центр 11cb катушки 11b на стороне транспортного средства позиционируется в пределах допустимого диапазона 21 подачи мощности, даже если возникает нарушение совмещения позиции (отклонение по оси X) в направлении по оси X, как показано в катушке 11b на стороне транспортного средства на фиг. 2, устройство помощи при парковке определяет то, что подача мощности может начинаться.
[0018] "Допустимый диапазон 21 подачи мощности" на фиг. 2 указывает диапазон, который может задаваться посредством центра 11ca катушки 11a на стороне транспортного средства с использованием ортогональной системы координат, со ссылкой на центр катушки 12 на стороне земли. Другими словами, устройство помощи при парковке определяет принимаемое напряжение, идентичное минимальному допустимому напряжению (V0), когда центр 11ca катушки 11a на стороне транспортного средства позиционируется на внешнем краю допустимого диапазона 21 подачи мощности, и устройство помощи при парковке определяет принимаемое напряжение, превышающее минимальное допустимое напряжение (V0), внутри внешнего края допустимого диапазона 21 подачи мощности.
[0019] С другой стороны, как показано на частичных чертежах в верхней правой стороне и нижнем правом углу по фиг. 2, когда зазор является большим, коэффициент связи между катушками уменьшается, и в силу этого эффективность подачи мощности уменьшается, даже если нарушение совмещения позиции в направлении по оси Y или в направлении по оси X равно ему. Соответственно, допустимый диапазон 21 подачи мощности в плоскости X-Y уменьшается. Частичный чертеж в верхнем правом углу по фиг. 2 является схемой в поперечном сечении частичного чертежа в нижнем правом углу по фиг. 2 вдоль линии B-B. Например, когда зазор является большим, поскольку центр 11cb катушки 11b на стороне транспортного средства, показанной на фиг. 2, позиционируется за пределами допустимого диапазона 21 подачи мощности, устройство помощи при парковке определяет то, что подача мощности не может начинаться.
[0020] Как показано на фиг. 3, размер допустимого диапазона 21 подачи мощности в плоскости X-Y изменяется в соответствии с расстоянием (зазором) между катушками в направлении по оси Z. Поскольку коэффициент связи между катушками увеличивается, и эффективность подачи мощности также увеличивается, когда зазор является небольшим, допустимый диапазон 21 подачи мощности в плоскости X-Y также увеличивается. Форма допустимого диапазона 21 подачи мощности в плоскости X-Y изменяется в соответствии с формами и числами катушки 11 на стороне транспортного средства и катушки 12 на стороне земли и компоновкой магнитного материала и немагнитного материала, существующего около катушки. Следовательно, хотя допустимый диапазон 21 подачи мощности показан в точном эллипсе на чертежах, форма допустимого диапазона 21 подачи мощности может представлять собой не только точный эллипс и идеальную окружность, но также и эллипс или идеальную окружность, включающую в себя некоторую неровность, либо прямоугольную форму, включающую в себя угловые участки, имеющие предварительно определенную кривизну.
[0021] Поскольку высота транспортного средства 2 изменяется в соответствии с проведением посадки и высадки пассажира и загрузкой и разгрузкой груза на транспортном средстве 2, зазор также колеблется согласно этой измененной высоте. Когда пассажир не садится в транспортное средство 2, и груз не загружается в транспортное средство 2 (что упоминается как "состояние пустого автомобиля"), зазор становится наибольшим значением (Gmax). Когда максимальное число пассажиров садится в транспортное средство, и максимальный вес груза загружается в него (что упоминается как "полностью занятое состояние/полностью загруженное состояние"), зазор становится наименьшим значением (Gmin).
[0022] Диапазон, который может задаваться посредством зазора (т.е. максимального значения (Gmax) и минимального значения (Gmin) зазора), может прогнозироваться на основе конструкции подвески транспортного средства 2, пассажировместимости и максимальной загрузочной способности. Соответственно, можно сказать, что допустимый диапазон 21 подачи мощности представляет собой конечный диапазон также в направлении по оси Z. Следовательно, трехмерная форма в трехмерном пространстве, показанном на фиг. 3, может задаваться как допустимый диапазон 21 подачи мощности. Допустимый диапазон 21 подачи мощности включает в себя верхнюю поверхность 21a, параллельную плоскости X-Y, в которой максимальное значение (Gmax) зазора представляет собой компонент по оси Z, нижнюю поверхность 21b, параллельную плоскости X-Y, в которой минимальное значение (Gmin) зазора представляет собой компонент по оси Z, и боковую поверхность 21c, соединяющуюся между периферийным краем верхней поверхности 21a и периферийным краем нижней поверхности 21b. Верхняя поверхность 21a является более узкой, чем нижняя поверхность 21b, и боковая поверхность 21c является наклонной относительно оси Z. Центр катушки 12 на стороне земли используется в качестве точки начала координат в ортогональной системе координат. Таким образом, зазор может колебаться между максимальным значением (Gmax) и минимальным значением (Gmin) вследствие проведения посадки и высадки пассажира и загрузки и разгрузки груза на транспортном средстве 2. Кроме того, когда центр 11ca катушки 11 на стороне транспортного средства позиционируется на боковой поверхности 21c допустимого диапазона 21 подачи мощности, датчик 8 тока/напряжения должен измерять принимаемое напряжение, идентичное минимальному допустимому напряжению (V0).
[0023] Если зазор во время выполнения совмещения между катушками до начала подачи мощности (т.е. зазор до начала подачи мощности) отличается от зазора во время подачи мощности (т.е. зазора в ходе подачи мощности), надлежащая подача мощности может быть невозможной. Например, если пассажир садится в транспортное средство 2, или груз загружается в него во время выполнения совмещения между катушками до начала подачи мощности, зазор до начала подачи мощности является относительно небольшим. Тем не менее, если пассажир высаживается из транспортного средства 2, или груз вынимается из него в то время, когда подача мощности начинается, либо сразу после начала подачи мощности, после того, как совмещение между катушками завершается, зазор во время подачи мощности становится больше зазора до начала подачи мощности. Таким образом, если зазор в ходе подачи мощности становится больше зазора до начала подачи мощности, надлежащая подача мощности может быть невозможной. Более конкретно, хотя центр 11ca катушки 11a на стороне транспортного средства находится в пределах допустимого диапазона 21 подачи мощности во время совмещения между катушками, центр 11ca катушки 11a на стороне транспортного средства может отходить от допустимого диапазона 21 подачи мощности при последующем начале подачи мощности.
[0024] Например, со ссылкой на фиг. 4, предположим случай, в котором зазор колеблется от минимального значения (Gmin) до максимального значения (Gmax) посредством только максимального диапазона (Qmax) колебания. Фиг. 4 является схемой, показывающей допустимый диапазон 21 подачи мощности в первом квадранте плоскости X-Z, показанной на фиг. 3. Допустимый диапазон 21 подачи мощности, показанный на фиг. 4, включает в себя верхнюю поверхность 21a, включающую в себя максимальное значение (Gmax) зазора, нижнюю поверхность 21b, включающую в себя минимальное значение (Gmin) зазора, и боковую поверхность 21c, наклоненную в направлении, в котором компонент по оси Z уменьшается с увеличением компонента по оси X. Каждая из множества пунктирных линий, присоединенных внутри и за пределами допустимого диапазона 21 подачи мощности, указывает поверхность (эквипотенциальную поверхность), соединяющую позицию центра 11ca катушки 11a на стороне транспортного средства для измерения идентичного принимаемого напряжения в плоскости X-Z. Эквипотенциальные поверхности являются параллельными друг другу, и эквипотенциальные поверхности также являются параллельными боковой поверхности 21c. Чем дальше от точки начала координат, тем меньше значение принимаемого напряжения, и принимаемое напряжение, указываемое посредством боковой поверхности 21c, становится минимальным допустимым напряжением (V0), как описано выше. Более конкретно, если принимаемое напряжение равно или выше минимального допустимого напряжения (V0), устройство помощи при парковке может определять то, что центр 11ca катушки 11a на стороне транспортного средства позиционируется в пределах допустимого диапазона 21 подачи мощности. Тем не менее, необязательно определять или оценивать систему XYZ-координат центра 11ca катушки 11a на стороне транспортного средства, в настоящих вариантах осуществления. Поскольку величина принимаемых напряжений представляет собой скалярную величину, она позволяет оценивать позицию эквипотенциальной поверхности, на которой позиционируется центр 11ca катушки 11a на стороне транспортного средства, на основе принимаемого напряжения. Тем не менее, затруднительно оценивать позицию (векторную величину) эквипотенциальной поверхности, на которой позиционируется центр 11ca катушки 11a на стороне транспортного средства.
[0025] Например, когда центр 11ca катушки 11 на стороне транспортного средства представляет собой позицию t0 во время совмещения между катушками, он должен колебаться в позицию t1 во время выполнения беспроводной подачи мощности. Поскольку позиция t1 находится в пределах допустимого диапазона 21 подачи мощности, мощность может надлежащим образом подаваться. Напротив, когда центр 11ca катушки 11 на стороне транспортного средства представляет собой позицию t0' во время совмещения между катушками, он должен колебаться в позицию t1' во время выполнения беспроводной подачи мощности. Позиция t1' находится за пределами допустимого диапазона 21 подачи мощности. Соответственно, хотя устройство помощи при парковке определяет то, что мощность может подаваться во время совмещения между катушками, после этого зазор колеблется во время выполнения подачи мощности. Следовательно, поскольку коэффициент связи между катушками уменьшается, и эффективность подачи мощности также уменьшается, мощность не может надлежащим образом подаваться.
[0026] Нормально, поскольку затруднительно точно определять состояние посадки пассажира в транспортное средство 2 и состояние загрузки груза, затруднительно точно измерять или оценивать значение зазора. Кроме того, хотя устройство помощи при парковке определяет то, что мощность может подаваться во время совмещения между катушками, затем должно исключаться то, что подача мощности становится невозможной во время выполнения подачи мощности, поскольку зазор колеблется. Чтобы исключать такое некорректное определение возможности подачи мощности, предполагается, что зазор должен колебаться посредством максимального диапазона (Qmax) колебания. Таким образом, как показано на фиг. 4, он должен совмещаться между катушками в полностью занятом состоянии/полностью загруженном состоянии (Gmin) и затем предполагать подачу мощности в состоянии пустого автомобиля (Gmax).
[0027] Таким образом, при условии максимального диапазона (Qmax) колебания, необходимо сужать допустимый диапазон 21 подачи мощности во время совмещения между катушками посредством разности (V1-V0) потенциалов принимаемого напряжения, соответствующей максимальному диапазону (Qmax) колебания. В частности, необходимо совмещать центр 11ca катушки 11 на стороне транспортного средства с диапазоном внутри пунктирной линии H1, в котором принимаемое напряжение во время совмещения между катушками равно или выше напряжения (V1). Как показано на фиг. 4, когда принимаемое напряжение во время совмещения между катушками равно или выше минимального допустимого напряжения V0 и равно или ниже напряжения V1, мощность может подаваться, если зазор не колеблется, но мощность не может подаваться, если зазор колеблется посредством максимального диапазона (Qmax) колебания.
[0028] Фактически, надлежащим образом предполагается, что совмещение между катушками может выполняться в состоянии (Gmin) пустого автомобиля. В этом случае, диапазон, который становится равным или превышающим напряжение (V1), представляет собой только позицию t3, показанную на фиг. 4, определяется то, что мощность не может подаваться, за исключением позиции t3, и в силу этого совмещение между катушками является практически невозможным.
[0029] Соответственно, устройство помощи при парковке согласно вариантам осуществления заранее получает разность потенциалов между принимаемым напряжением (вторым принимаемым напряжением) катушки 11 на стороне транспортного средства, измеряемым, когда совмещение между катушками выполняется до помощи в совмещении между катушками, и принимаемым напряжением (третьим принимаемым напряжением) катушки 11 на стороне транспортного средства, измеряемым после того, как совмещение между катушками и подача мощности завершаются. Величина колебания зазора может оцениваться на основе разности потенциалов между принимаемым напряжением во время совмещения между катушками до начала подачи мощности и принимаемым напряжением после завершения подачи мощности. Кроме того, при помощи в парковке, устройство помощи при парковке определяет то, может или нет подаваться мощность, с учетом величины колебания зазора (разности потенциалов) в прошлом. Посредством учета величины колебания зазора в прошлом, необязательно предполагать максимальный диапазон (Qmax) колебания, показанный на фиг. 4. Соответственно, поскольку возможность переоценки диапазона колебания зазора может уменьшаться при подавлении ошибочного определения возможности подачи мощности, допустимый диапазон подачи мощности может широко задаваться, и в силу этого может повышаться удобство парковки.
[0030] Например, как показано на фиг. 5, величина (Qre) колебания зазора оценивается на основе разности (V3-V0) потенциалов между принимаемым напряжением (V3) во время совмещения, измеряемым в прошлом, и принимаемым напряжением (V0) после завершения подачи мощности. Принимаемое напряжение (V3) становится пороговым значением принимаемого напряжения во время помощи в совмещении при условии величины (Qre) колебания зазора, при помощи в совмещении между катушками. Более конкретно, если принимаемое напряжение во время помощи в совмещении равно или выше напряжения (V3), можно определять то, что мощность может подаваться, поскольку центр 11ca катушки 11 на стороне транспортного средства находится в пределах допустимого диапазона 21 подачи мощности, даже если возникает колебание величины, идентичной предыдущей величине (Qre) колебания.
[0031] В частности, центр 11ca катушки 11 на стороне транспортного средства может совмещаться с диапазоном внутри пунктирной линии H2, в котором принимаемое напряжение во время совмещения между катушками равно или выше напряжения (V3). Как показано на фиг. 5, когда принимаемое напряжение во время совмещения между катушками находится между V3-V1 (в области 27), мощность может подаваться, даже если зазор колеблется посредством величины (Qre) колебания. Допустимый диапазон подачи мощности может широко задаваться, поскольку пороговое значение (V3), меньшее порогового значения (V1), показанного на фиг. 4, может задаваться посредством сокращения диапазона колебания зазора, который должен предполагаться.
[0032] Способ помощи при парковке
Далее поясняется пример способа помощи при парковке посредством устройства помощи при парковке со ссылкой на фиг. 6A-6C. Во-первых, со ссылкой на фиг. 6A, далее поясняется работа до начала беспроводной подачи мощности. Блок-схема последовательности операций способа, показанная на фиг. 6A, соответствует не только операции при помощи в парковке, но также и операции во время совмещения между катушками до помощи в парковке.
[0033] На этапе S01, контроллер 4 транспортного средства в качестве устройства помощи при парковке передает запрос сигнала совмещения в блок 3 источника мощности на стороне земли посредством устройства 6 беспроводной связи. Блок 3 источника мощности на стороне земли, который принимает этот запрос, начинает возбуждение (возбуждение для обнаружения позиции катушки), нацеленное на совмещение между катушками. "Возбуждение для обнаружения позиции катушки" представляет собой возбуждение, более слабое, чем основное возбуждение, в отличие от основного возбуждения для передачи мощности. Следует отметить, что поскольку возбуждение для обнаружения позиции катушки не нацелено на заряд аккумулятора 10, контроллер 4 транспортного средства выполняет такое управление, чтобы выключать релейный переключатель 9, чтобы электрически отсоединяться между аккумулятором 10 и катушкой 11 на стороне транспортного средства.
[0034] Переходя к этапу S03, контроллер 4 транспортного средства суммирует разность (Vgap) потенциалов принимаемого напряжения, вычисленную заранее, с наименьшим принимаемым напряжением (пороговым значением V0), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора, и вычисляет пороговое напряжение Vth (первое опорное значение). Разность (Vgap) потенциалов представляет собой разность потенциалов между принимаемым напряжением, измеряемым, когда совмещение между катушками выполняется до помощи в совмещении между катушками, и принимаемым напряжением, измеряемым после того, как совмещение между катушками и подача мощности завершаются, и соответствует разности (V3-V0) потенциалов, показанной на фиг. 5. Пороговое напряжение Vth соответствует напряжению V3, показанному на фиг. 5.
[0035] Переходя к этапу S05, транспортное средство 2 приближается к месту для парковки, в котором установлена катушка 12 на стороне земли. Принимаемое напряжение увеличивается по мере того, как расстояние между катушками уменьшается. На этапе S07, принимаемое напряжение (NOW: первое принимаемое напряжение) непрерывно измеряется посредством датчика 8 тока/напряжения. Помимо этого, когда IGN-переключатель выключается ("Да" на S15), принимаемое напряжение, измеряемое на этапе S07, сохраняется в контроллере 4 транспортного средства в качестве второго принимаемого напряжения (Vt0).
[0036] Переходя к этапу S09, контроллер 4 транспортного средства сравнивает принимаемое напряжение (NOW) с пороговым напряжением Vth. Когда принимаемое напряжение (NOW) становится равным или превышающим пороговое напряжение Vth вследствие приближения транспортного средства 2 ("Да" на S09), поскольку центр 11ca катушки 11 на стороне транспортного средства находится в пределах допустимого диапазона 21 подачи мощности, даже если возникает колебание зазора (соответствующее величине Qre колебания, показанной фиг. 5), соответствующее разности (Vgap) потенциалов, можно определять то, что мощность может подаваться. Соответственно, переходя к этапу S11, изображение, указывающее то, что мощность может подаваться, отображается на модуле 5 отображения, и после этого процесс переходит к этапу S15. С другой стороны, когда принимаемое напряжение (NOW) ниже порогового напряжения Vth ("Нет" на S09), можно определять то, что совмещение катушек по-прежнему является недостаточным. Таким образом, если возникает колебание зазора, соответствующее разности (Vgap) потенциалов, имеется вероятность того, что центр 11ca катушки 11 на стороне транспортного средства может отходить от допустимого диапазона 21 подачи мощности. Соответственно, переходя к этапу S13, изображение, указывающее то, что мощность не может подаваться, отображается на модуле 5 отображения, и после этого процесс возвращается к этапу S05.
[0037] На этапе S15, определяется то, выключается или нет переключатель зажигания (IGN-переключатель) транспортного средства 2. Если IGN-переключатель выключен ("Да" на S15), определяется то, что совмещение между катушками завершается, и после этого процесс переходит к этапу S17 и начинает подачу мощности. Если IGN-переключатель по-прежнему включен ("Нет" на S15), определяется то, что совмещение между катушками не завершается, и после этого процесс возвращается к этапу S05. Принимаемое напряжение в то время, когда IGN-переключатель выключается, сохраняется в контроллере 4 транспортного средства в качестве второго принимаемого напряжения (Vt0).
[0038] После этого поясняется работа от начала до прекращения беспроводной подачи мощности теперь со ссылкой на фиг. 6B. На этапе S21, контроллер 4 транспортного средства передает запрос мощности, которая должна подаваться в блок 3 источника мощности на стороне земли, посредством устройства 6 беспроводной связи, с тем чтобы электрически соединять аккумулятор 10 с катушкой 11 на стороне транспортного средства посредством такого управления, чтобы включать релейный переключатель 9. Блок 3 источника мощности на стороне земли, который принимает запрос мощности, которая должна подаваться, начинает основное возбуждение для передачи мощности, которая должна подаваться.
[0039] Переходя к этапу S23, контроллер 4 транспортного средства измеряет принимаемую мощность (Pout) посредством датчика 8 тока/напряжения. На этапе S25, контроллер 4 транспортного средства получает информацию (Pin) относительно мощности передачи из блока 3 источника мощности на стороне земли и затем вычисляет эффективность подачи мощности (Eta = Pout/Pin) на этапе S27.
[0040] Переход к этапу S29, определяется то, равна или выше либо нет эффективность Eta подачи мощности пороговой эффективности (Eta_0). Если эффективность Eta подачи мощности ниже пороговой эффективности (Eta_0) ("Нет" на S29), можно определять то, что эффективность Eta подачи мощности уменьшается вследствие такой причины, что транспортное средство 2 перемещается во время подачи мощности, постороннее вещество входит между катушками, и т.п. Соответственно, на этапе S33, запрос на то, чтобы прекращать передачу мощности, передается в блок 3 источника мощности на стороне земли. Когда блок 3 источника мощности на стороне земли, который принимает этот запрос, прекращает передачу мощности, подача мощности прекращается (S35).
[0041] С другой стороны, если эффективность Eta подачи мощности равна или выше пороговой эффективности (Eta_0) ("Да" на S29), определяется то, что передача мощности может продолжаться, и после этого процесс переходит к этапу S31, чтобы определять то, имеется или нет запрос на то, чтобы прекращать электрический заряд, от пользователя. Если имеется запрос на то, чтобы прекращать электрический заряд, от пользователя ("Да" на S31), процесс переходит к этапу S33. Если отсутствует запрос на то, чтобы прекращать электрический заряд, от пользователя ("Нет" на S31), процесс возвращается к этапу S21, чтобы продолжать подачу мощности.
[0042] Далее поясняется работа после прекращения беспроводной подачи мощности со ссылкой на фиг. 6C. Когда передача мощности прекращается, контроллер 4 транспортного средства, во-первых, управляет таким образом, чтобы выключать релейный переключатель 9, на этапе S41. Следовательно, аккумулятор 10 снова электрически отсоединяется из катушки 11 на стороне транспортного средства. Переходя к этапу S43, электрический заряд, накапливаемый в конденсаторе, включенном в модуль 7 сглаживания, разряжается. На этапе S45, контроллер 4 транспортного средства снова передает запрос сигнала совмещения в блок 3 источника мощности на стороне земли посредством устройства 6 беспроводной связи. Блок 3 источника мощности на стороне земли, который принимает этот запрос, начинает возбуждение для обнаружения позиции катушки, нацеленное на совмещение между катушками.
[0043] Переходя к этапу S47, принимаемое напряжение (Vt1: третье принимаемое напряжение) измеряется посредством датчика 8 тока/напряжения. Принимаемое напряжение (Vt1) сравнивается с принимаемым напряжением (Vt0), измеряемым до начала подачи мощности на фиг. 6A. Поскольку можно определять то, что зазор колеблется между моментом до начала подачи мощности и после завершения подачи мощности, если принимаемое напряжение (Vt1) ниже принимаемого напряжения (Vt0) ("Да" на S49), процесс переходит к этапу S51, и разность (Vgap) потенциалов, соответствующая колебанию зазора, задается как Vgap=Vt0-Vt1. С другой стороны, поскольку можно определять то, что зазор не колеблется, если принимаемое напряжение (Vt1) не ниже принимаемого напряжения (Vt0) ("Нет" на S49), процесс переходит к этапу S51, и разность (Vgap) потенциалов, соответствующая колебанию зазора, задается в качестве нуля.
[0044] Таким образом, разность (Vgap) потенциалов, заданная на этапах S51 и S53, показанных на фиг. 6C, используется в качестве разности (Vgap) потенциалов на этапе S03, показанном на фиг. 6A, во время следующей помощи при парковке. Более конкретно, разность (Vgap) потенциалов между принимаемым напряжением (Vt0), измеряемым на этапе S07, показанном на фиг. 6A, и принимаемым напряжением (Vt1), измеряемым на этапе S47 показанном на фиг. 6C, в предыдущее время, используется в качестве разности (Vgap) потенциалов на этапе S03, показанном на фиг. 6A, во время следующей помощи при парковке. Термин "помощь при парковке", используемый в данном документе, означает то, чтобы помогать в совмещении между катушками до начала подачи мощности.
[0045] Период 41 времени, показанный на фиг. 10, представляет собой период времени во время выполнения совмещения между катушками до начала подачи мощности, в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 6A. В течение периода 41 времени, принимаемое напряжение (Vt0: второе принимаемое напряжение) в то время, когда совмещение катушек завершается ("Да" на S15), измеряется (S07). Затем, в течение периода 42 времени, мощность подается в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 6B. Период 42 времени представляет собой период времени во время подачи мощности в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 6B. После периода 42 времени, принимаемое напряжение (Vt1: третье принимаемое напряжение) измеряется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 6C. Следовательно, разность (Vgap) потенциалов может заранее задаваться до помощи в совмещении между катушками.
[0046] Затем, помощь в совмещении между катушками до начала подачи мощности осуществляется в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 6A, в течение периода 43 времени. В это время, принимаемое напряжение (NOW: первое принимаемое напряжение), которое формируется в катушке 11 на стороне транспортного средства, измеряется (S07), вероятность приема мощности определяется (S09), и результат определения представляется пользователю (пассажиру) (S11, S13).
[0047] Как показано на фиг. 10, период 43 времени для выполнения помощи при парковке может одновременно представлять собой период 41 времени для измерения принимаемого напряжения (Vt0: второго принимаемого напряжения). Таким образом, принимаемое напряжение (Vt0: второе принимаемое напряжение) может заранее измеряться для следующей помощи при парковке, при выполнении помощи при парковке посредством измерения принимаемого напряжения (NOW: первого принимаемого напряжения). Другими словами, при помощи в совмещении между катушками (период 43 времени), принимаемое напряжение (Vt0: второе принимаемое напряжение) которое должно использоваться при помощи в совмещении между катушками в следующий раз, может измеряться. Следовательно, помощь в совмещении катушек может многократно выполняться с учетом величины колебания зазора во время предыдущей подачи мощности.
[0048] Далее поясняются примеры изображений, которые должны отображаться на модуле 5 отображения на этапе S11 и на этапе S13, показанных на фиг. 6A. Во-первых, фиг. 7A-7C показывают примеры изображений уровнемера, включающих в себя две области (29, 30) и первую и вторую стрелки 31 и 32, которые перемещаются в продольном направлении вдоль двух областей (29, 30), разделенных в продольном направлении. Две области включают в себя область 29 невозможности подачи мощности, указывающую область, в которой мощность не может подаваться, и область 30 возможности подачи мощности, указывающую область, в которой мощность может подаваться. Граница между двумя областями (29, 30) указывает минимальное принимаемое напряжение (минимальное допустимое напряжение V0), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора. На фиг. 7A, первая стрелка 31 указывает область 29 невозможности подачи мощности. Первая стрелка 31 указывает текущее принимаемое напряжение (NOW: первое принимаемое напряжение). Поскольку принимаемое напряжение (NOW: первое принимаемое напряжение) ниже минимального допустимого напряжения V0, указывается то, что беспроводная подача мощности не может выполняться, даже в случае, если оно является идентичным принимаемому напряжению, измеряемому в данный момент, т.е. отсутствует колебание зазора. Таким образом, фиг. 7A показывает пример изображения, указывающего "N.G.-позицию" (ненадлежащую позицию), отображаемую на этапе S13, показанном на фиг. 6A.
[0049] На фиг. 7B, вторая стрелка 32 в дополнение к первой стрелке 31 отображается. Вторая стрелка 32 указывает значение (второе опорное значение), полученное посредством вычитания разности (Vgap) потенциалов, вычисленной во время предыдущей подачи мощности, из текущего принимаемого напряжения (NOW: первого принимаемого напряжения). Таким образом, она указывает опорное значение принимаемого напряжения с учетом значения (Qre) колебания зазора, оцененного на основе предыдущей операции подачи мощности. Интервал между первой стрелкой 31 и второй стрелкой 32 указывает разность (Vgap) потенциалов, вычисленную во время предыдущей подачи мощности. Вторая стрелка 32 перемещается в сторону области 29 невозможности подачи мощности от первой стрелки 31 только посредством величины разности (Vgap) потенциалов.
[0050] На фиг. 7B, хотя первая стрелка 31 указывает область 30 возможности подачи мощности, вторая стрелка 32 указывает область 29 невозможности подачи мощности. Соответственно, может представлять пользователю то, что мощность может подаваться, если отсутствует колебание зазора, поскольку остается измеряемое в данный момент принимаемое напряжение (NOW), но мощность не может подаваться с учетом значения колебания зазора, оцененного из предыдущей операции подачи мощности. Фиг. 7B показывает пример изображения, указывающего "N.G.-позицию" (ненадлежащую позицию), отображаемую на этапе S13, показанном на фиг. 6A.
[0051] На фиг. 7C обе из первой стрелки 31 и второй стрелки 32 указывают область 30 возможности подачи мощности. Фиг. 7C показывает пример изображения, указывающего "O.K.-позицию" (надлежащую позицию), отображаемого на этапе S11, показанном на фиг. 6A. Можно представлять пользователю то, что мощность может подаваться даже с учетом значения колебания зазора, оцененного из предыдущей операции подачи мощности.
[0052] Таким образом, устройство помощи при парковке согласно вариантам осуществления помогает в совмещении между катушками посредством представления результата сравнения между вторым опорным значением (второй стрелкой 32), полученным посредством вычитания из текущего принимаемого напряжения (NOW: первой стрелки 31) разности (Vgap) потенциалов, вычисленной во время предыдущей подачи мощности, и минимальным допустимым напряжением (V0: границей между областями 29 и 30), пассажиру. Соответственно, устройство помощи при парковке согласно вариантам осуществления может понятно представлять то, может или нет подаваться мощность.
[0053] Затем, фиг. 8A-8C показывают примеры изображений уровнемера, включающих в себя четыре области (29, 30a, 30b, 30c) и первую стрелку 31, которая перемещается в продольном направлении вдоль четырех областей (29, 30a, 30b, 30c), разделенных в продольном направлении. Четыре области включают в себя первую область 29 невозможности подачи мощности, вторые области 30a невозможности подачи мощности, первые области 30b возможности подачи мощности и вторые области 30c возможности подачи мощности. Первая область 29 невозможности подачи мощности указывает то, что мощность не может подаваться даже в случае, если отсутствует колебание зазора, поскольку остается измеряемое в данный момент принимаемое напряжение (NOW). Вторая область 30a невозможности подачи мощности указывает то, что мощность не может подаваться, с учетом значения колебания зазора, оцененного из предыдущей операции подачи мощности. Первая область 30b возможности подачи мощности указывает то, что мощность может подаваться, с учетом значения колебания зазора, оцененного из предыдущей операции подачи мощности. Вторая область 30c возможности подачи мощности указывает то, что мощность может подаваться даже с учетом максимального диапазона (Qmax) колебания зазора. Первая стрелка 31 указывает текущее принимаемое напряжение (NOW: первое принимаемое напряжение).
[0054] На фиг. 8A, первая стрелка 31 указывает первую область 29 невозможности подачи мощности. Соответственно, пользователю представляется то, что мощность не может подаваться даже в случае оставшегося принимаемого напряжения (NOW), измеряемого в данный момент, т.е. в случае, если отсутствует колебание зазора. Таким образом, фиг. 8A показывает пример изображения, указывающего "N.G.-позицию" (ненадлежащую позицию), на этапе S13, показанном на фиг. 6A.
[0055] На фиг. 8B, первая стрелка 31 указывает вторую область 30a невозможности подачи мощности. Соответственно, можно представлять пользователю то, что мощность может подаваться, если отсутствует колебание зазора, поскольку остается измеряемое в данный момент принимаемое напряжение (NOW), но мощность не может подаваться с учетом значения колебания зазора, оцененного из предыдущей операции подачи мощности. Таким образом, фиг. 8B показывает пример изображения, указывающего "N.G.-позицию" (ненадлежащую позицию), на этапе S13, показанном на фиг. 6A.
[0056] Граница между первой областью 29 невозможности подачи мощности и второй областью 30a невозможности подачи мощности указывает минимальное напряжение (минимальное допустимое напряжение V0), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора. Граница между второй областью 30a невозможности подачи мощности и первой областью 30b возможности подачи мощности указывает значение (первое опорное значение), полученное посредством суммирования разности (Vgap) потенциалов, вычисленной во время предыдущей операции подачи мощности, с минимальным допустимым напряжением V0. Соответственно, ширина второй области 30a невозможности подачи мощности указывает разность (Vgap) потенциалов, вычисленную во время предыдущей подачи мощности.
[0057] На фиг. 8C, первая стрелка 31 указывает первую область 30b возможности подачи мощности. Соответственно, можно представлять пользователю то, что мощность может подаваться с учетом значения колебания зазора, оцененного из предыдущей операции подачи мощности. Таким образом, фиг. 8C показывает пример изображения, указывающего "O.K.-позицию" (надлежащую позицию), на этапе S11, показанном на фиг. 6A.
[0058] Хотя иллюстрация опускается, если первая стрелка 31 указывает вторую область 30c возможности подачи мощности, можно представлять пользователю то, что мощность может подаваться, даже если возникает колебание зазора, идентичное максимальному диапазону (Qmax) колебания зазора.
[0059] Таким образом, устройство помощи при парковке помогает в совмещении между катушками посредством представления пассажиру результата сравнения между текущим принимаемым напряжением (NOW: первой стрелкой 31) и первым опорным значением (границей между областями 30a и 30b), полученным посредством суммирования разности (Vgap) потенциалов, вычисленной во время предыдущей подачи мощности, с минимальным напряжением (V0: границей между областями 29 и 30a), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора. Соответственно, устройство помощи при парковке согласно вариантам осуществления может понятно представлять то, может или нет подаваться мощность.
[0060] Со ссылкой на фиг. 9, далее поясняется принимаемое напряжение (Vt1: третье принимаемое напряжение), измеряемое после подачи мощности. Возбуждение для обнаружения позиции катушки начинается от времени T1 до начала подачи мощности, и по мере того, как транспортное средство 2 приближается, принимаемое напряжение (NOW) также увеличивается. Контроллер 4 транспортного средства измеряет принимаемое напряжение (Vt0), которое должно сохраняться от времени T2, когда транспортное средство 2 остановлено, в пределах допустимого диапазона подачи мощности, до времени T3, когда возбуждение для обнаружения позиции катушки прекращается.
[0061] Во время начала подачи мощности или через некоторое время после начала подачи мощности, предполагается, что пассажир садится, и/или груз разгружен из транспортного средства 2. Как упомянуто выше, если зазор во время выполнения совмещения между катушками до начала подачи мощности (т.е. зазор до начала подачи мощности) отличается от зазора во время подачи мощности (т.е. зазора в ходе подачи мощности), надлежащая подача мощности может быть невозможной. Соответственно, в принципе, предпочтительно вычислять разность потенциалов на основе как принимаемого напряжения (Vt0), измеряемого до подачи мощности, так и принимаемого напряжения, измеряемого во время подачи мощности.
[0062] Тем не менее, как показано на фиг. 9, во время совмещения до подачи мощности, релейный переключатель 9 управляется таким образом, что он выключен, и в силу этого катушка 11 на стороне транспортного средства отсоединена от аккумулятора 10. С другой стороны, поскольку необходимо передавать мощность в аккумулятор 10 во время подачи мощности, релейный переключатель 9 управляется таким образом, что он включается, и в силу этого катушка 11 на стороне транспортного средства соединяется с аккумулятором 10. Соответственно, схемные конфигурации для измерения принимаемого напряжения отличаются между моментом до подачи мощности и во время подачи мощности. Импеданс аккумулятора 10 в основном затрагивает измерение принимаемого напряжения, и в силу этого принимаемое напряжение в основном зависит от напряжения аккумулятора 10. Кроме того, поскольку возбуждение, выполняемое во время подачи мощности, является более сильным, чем возбуждение для обнаружения позиции катушки, выполняемое до подачи мощности и после подачи мощности, принимаемое напряжение, которое должно измеряться, также увеличивается. Соответственно, затруднительно измерять принимаемое напряжение на идентичных условиях до подачи мощности и во время подачи мощности.
[0063] Соответственно, контроллер 4 транспортного средства начинает возбуждение для обнаружения позиции катушки снова от времени T4, когда некоторое время истекло, после того, как подача мощности завершается, и аккумулятор 10 электрически отсоединяется от катушки 11 на стороне транспортного средства. Контроллер 4 транспортного средства измеряет принимаемое напряжение (Vt1) до времени T5, когда возбуждение для обнаружения позиции катушки прекращается. Это обусловлено тем, что предполагается, что пассажир по-прежнему сидит, и/или груз по-прежнему разгружен из транспортного средства 2, некоторое время (T4-T5) после подачи мощности в течение достаточного длительного времени. Кроме того, поскольку релейный переключатель управляется таким образом, что он выключается, схемные конфигурации для измерения принимаемого напряжения могут формироваться эквивалентными до подачи мощности и после подачи мощности.
[0064] Как пояснено выше, согласно первому варианту осуществления, могут получаться следующие рабочие/функциональные преимущества. Величина колебания зазора может оцениваться из разности (Vgap) потенциалов между принимаемым напряжением во время совмещения катушек, которое заранее получается, и принимаемым напряжением после завершения подачи мощности. Соответственно, как показано на фиг. 4 и 5, может точно определяться то, может или нет подаваться мощность, на основе допустимого диапазона (H1, H2) подачи мощности, который изменяется в соответствии с величиной колебания зазора, посредством определения возможности подачи мощности на основе разности (Vgap) потенциалов и принимаемого напряжения (NOW). Кроме того, с учетом величины колебания зазора в прошлом, поскольку возможность переоценки диапазона колебания зазора может уменьшаться, допустимый диапазон подачи мощности может широко задаваться, и в силу этого может повышаться удобство парковки.
[0065] Второй вариант осуществления
Первый вариант осуществления показывает пример помощи в совмещении катушек во время следующей подачи мощности с учетом колебания зазора во время предыдущей подачи мощности. Таким образом, хотя колебание зазора, к которому следует обращаться, представляет собой только одно предыдущее значение в первом варианте осуществления, помощь в совмещении катушек может осуществляться с учетом множества операций подачи мощности, выполняемых в прошлом.
[0066] Более конкретно, до помощи в совмещении между катушками, устройство помощи при парковке заранее измеряет и записывает множество пар принимаемого напряжения до подачи мощности и принимаемого напряжения после подачи мощности (второго принимаемого напряжения Vt0, третьего принимаемого напряжения Vt1). Затем, при помощи в совмещении между катушками, среднее значение (Vgap_ave) множества пар разностей потенциалов или максимальное значение (Vgap_max) множества пар разностей потенциалов может использоваться в качестве разности (Vgap) потенциалов, вычисленной заранее. Кроме того, также можно одновременно использовать среднее значение (Vgap_ave) и максимальное значение (Vgap_max), в качестве разности (Vgap) потенциалов, вычисленной заранее.
[0067] Устройство помощи при парковке согласно второму варианту осуществления помогает в совмещении между катушками посредством представления возможности подачи мощности, определенной посредством одновременного использования среднего значения (Vgap_ave) и максимального значения (Vgap_max) разности потенциалов, пассажиру.
[0068] Во-первых, далее поясняются примеры работы до подачи мощности, во время подачи мощности и после подачи мощности в устройстве помощи при парковке согласно второму варианту осуществления, со ссылкой на фиг. 11A-11C. Из числа этапов фиг. 11A-11C, этап, идентичный этапу фиг. 6A-6C, обозначается посредством идентичной ссылки с номером, и его описание опускается.
[0069] Во-первых, со ссылкой на фиг. 11A, далее поясняется работа во время совмещения катушек до подачи мощности. На этапе S51, два пороговых напряжения (Vth1 и Vth2) вычисляются посредством среднего значения (Vgap_ave) и максимального значения (Vgap_max) разности потенциалов. Более конкретно, первое пороговое напряжение (Vth1) вычисляется посредством суммирования среднего значения (Vgap_ave) разности потенциалов с пороговым значением (V0), и второе пороговое напряжение (Vth2) вычисляется посредством суммирования максимального значения (Vgap_max) разности потенциалов с пороговым значением (V0).
[0070] Среднее значение (Vgap_ave) и максимальное значение (Vgap_max) разности потенциалов, соответственно, составляют среднее значение и максимальное значение разностей потенциалов во множестве операций подачи мощности, выполняемых в прошлом.
[0071] На этапе S53, принимаемое напряжение (NOW: первое принимаемое напряжение) сравнивается с первым пороговым напряжением (Vth1). На этапе S55, принимаемое напряжение (NOW) сравнивается со вторым пороговым напряжением (Vth2). Если принимаемое напряжение (NOW) равно или выше первого порогового напряжения (Vth1) и равно или выше второго порогового напряжения (Vth2) ("Да" на S55), зеленый сигнал включается на модуле 5 отображения (светодиоде). Если принимаемое напряжение (NOW) равно или выше первого порогового напряжения (Vth1) и ниже второго порогового напряжения (Vth2) ("Нет" на S55), желтый сигнал включается на модуле 5 отображения (светодиоде). Если принимаемое напряжение (Vt0) ниже первого порогового напряжения (Vth1) ("Нет" на S53), красный сигнал включается на модуле 5 отображения (светодиоде). Хотя иллюстрация опускается, модуль 5 отображения согласно второму варианту осуществления включает в себя не дисплей, выполненный с возможностью отображать уровнемер, а, по меньшей мере, светодиод, выполненный с возможностью излучать свет в красном цвете, светодиод, выполненный с возможностью излучать свет в желтом цвете, и светодиод, выполненный с возможностью излучать свет в зеленом цвете. Такие светодиоды монтируются в позиции, которую пользователь (пассажир) может визуально распознавать, например, в приборной панели транспортного средства 2.
[0072] Если красный сигнал включается, можно представлять пассажиру то, что мощность не может подаваться с учетом среднего значения (Vgap_ave) разности потенциалов. Таким образом, можно представлять пассажиру то, что центр 11c катушки 11 на стороне транспортного средства не может поддерживаться в пределах допустимого диапазона 21 подачи мощности, если возникает колебание зазора, равное или большее среднего значения колебания зазора в прошлом.
[0073] Если желтый сигнал включается, можно представлять пассажиру то, что мощность может подаваться с учетом среднего значения (Vgap_ave) разности потенциалов, но мощность не может подаваться с учетом максимального значения (Vgap_max) разности потенциалов. Таким образом, можно представлять пассажиру то, что центр 11c катушки 11 на стороне транспортного средства может поддерживаться в пределах допустимого диапазона 21 подачи мощности, если возникает колебание зазора, равное или меньшее среднего значения колебания зазора в прошлом. Кроме того, если возникает колебание зазора, равное или большее среднего значения колебания зазора в прошлом и равное или меньшее максимального значения колебания зазора в прошлом, можно представлять пассажиру то, что центр 11c катушки 11 на стороне транспортного средства должен отклоняться от допустимого диапазона 21 подачи мощности.
[0074] Если зеленый сигнал включается, можно представлять пассажиру то, что мощность может подаваться с учетом среднего значения (Vgap_ave) и максимального значения (Vgap_max) разностей потенциалов во множестве операций подачи мощности, выполняемых в прошлом. Таким образом, можно представлять пассажиру то, что центр 11c катушки 11 на стороне транспортного средства может поддерживаться в пределах допустимого диапазона 21 подачи мощности, даже если возникает колебание зазора, равное максимальному значению колебания зазора в прошлом.
[0075] Со ссылкой на фиг. 11B и 11C, далее поясняется работа во время подачи мощности и работа после подачи мощности. На этапе S63, контроллер 4 транспортного средства определяет то, равно или выше либо нет время подачи мощности 30 минут, если отсутствует запрос на то, чтобы прекращать электрический заряд, от пользователя ("Нет" на S31). Если операция подачи мощности длится меньше 30 минут, поскольку пассажир еще не высаживается, и груз по-прежнему загружен во время подачи мощности, имеется вероятность того, что колебание зазора не возникает. Соответственно, необязательно измерять принимаемое напряжение (Vt1) после подачи мощности. Соответственно, контроллер 4 транспортного средства выполняет запрос на то, чтобы подтверждать позицию после подачи мощности посредством устройства 6 беспроводной связи, только тогда, когда мощность подается в течение достаточного длительного времени ("Да" на S65).
[0076] Затем контроллер 4 транспортного средства измеряет принимаемое напряжение (Vt1) только тогда, когда запрос на то, чтобы подтверждать позицию после подачи мощности, выполняется на этапе S67, показанном на фиг. 11C. Следовательно, принимаемое напряжение (Vt1) во время операции подачи мощности, в которой колебание зазора не возникает, может удаляться из вычисления среднего значения (Vgap_ave). Шум удаляется, и в силу этого может повышаться точность вычисления среднего значения (Vgap_ave) разности потенциалов.
[0077] Кроме того, определяется то, остается или нет IGN-переключатель выключенным в течение предварительно определенного времени после того, как подача мощности завершается (например, в течение 3 минут) (S69-S73). Если IGN-переключатель включается в течение предварительно определенного времени после того, как подача мощности завершается, оценивается то, что пассажир уже садится, и/или груз загружается во время завершения подачи мощности. Соответственно, принимаемое напряжение (Vt1) измеряется только тогда, когда IGN-переключатель остается выключенным ("Да" на S73) в течение предварительно определенного времени после того, как подача мощности завершается (например, в течение 3 минут). Следовательно, принимаемое напряжение (Vt1) во время операции подачи мощности, в которой колебание зазора не возникает, может удаляться из вычисления среднего значения (Vgap_ave). Шум удаляется, и в силу этого может повышаться точность вычисления среднего значения (Vgap_ave) разности потенциалов.
[0078] То, обновляется или нет максимальное значение (Vgap_max), подтверждается на основе разности (Vgap) потенциалов, вычисленной на этапе S51 (S75, S77). Кроме того, на этапе S79, среднее значение (Vgap_ave) обновляется на основе разности (Vgap) потенциалов.
[0079] Как пояснено выше, согласно второму варианту осуществления, могут получаться следующие рабочие/функциональные преимущества. До помощи в совмещении между катушками, контроллер 4 транспортного средства заранее измеряет и записывает множество пар принимаемого напряжения до подачи мощности и принимаемого напряжения после подачи мощности (второго принимаемого напряжения Vt0, третьего принимаемого напряжения Vt1). Затем контроллер 4 транспортного средства помогает в совмещении между катушками посредством использования среднего значения (Vgap_ave) множества пар разностей потенциалов, или максимального значения (Vgap_max) множества пар разностей потенциалов может использоваться в качестве разности (Vgap) потенциалов, вычисленной заранее, при помощи в совмещении между катушками. Следовательно, величина колебания зазора при помощи в совмещении между катушками может прогнозироваться с достаточной точностью.
[0080] Модифицированный пример
Далее модифицированный пример второго варианта осуществления поясняет пример отображения изображения, указывающего "N.G.-позицию" (ненадлежащую позицию), либо изображения, указывающего "O.K.-позицию" (надлежащую позицию), посредством дисплея, смонтированного на приборной панели транспортного средства 2, аналогично первому варианту осуществления, вместо модуля 5 отображения (светодиодов).
[0081] Далее поясняются примеры изображений, которые должны отображаться на модуле 5 отображения на этапах S57, S59 и S61, показанных на фиг. 11A. Во-первых, фиг. 12A-12C показывают примеры изображений уровнемера, включающих в себя две области (29, 30) и первую-третью стрелки 31, 32 и 33, которые перемещаются в продольном направлении вдоль двух областей (29, 30), разделенных в продольном направлении. Две области включают в себя область 29 невозможности подачи мощности, указывающую область, в которой мощность не может подаваться, и область 30 возможности подачи мощности, указывающую область, в которой мощность может подаваться. Граница между двумя областями (29, 30) указывает минимальное принимаемое напряжение (минимальное допустимое напряжение V0), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора. Первая стрелка 31 указывает текущее принимаемое напряжение (NOW: первое принимаемое напряжение). Вторая стрелка 32 указывает значение (второе опорное значение), полученное посредством вычитания среднего значения (Vgap_ave) разности потенциалов из текущего принимаемого напряжения (NOW: первого принимаемого напряжения). Третья стрелка 33 указывает значение (третье опорное значение), полученное посредством вычитания максимального значения (Vgap_max) разности потенциалов из текущего принимаемого напряжения (NOW: первого принимаемого напряжения). Таким образом, вторая стрелка 32 и третья стрелка 33, соответственно, указывают принимаемые напряжения с учетом среднего значения и максимального значения колебания зазора, которые, соответственно, оцениваются из множества операций подачи мощности в прошлом. Интервал между первой стрелкой 31 и второй стрелкой 32 указывает среднее значение (Vgap_ave) разности потенциалов. Интервал между первой стрелкой 31 и третьей стрелкой 33 указывает максимальное значение (Vgap_max) разности потенциалов.
[0082] На фиг. 12A, первая стрелка 31 указывает область 30 возможности подачи мощности, и вторая стрелка 32 и третья стрелка 33 указывают область 29 невозможности подачи мощности. Соответственно, можно представлять пользователю то, что мощность может подаваться, если отсутствует колебание зазора, поскольку остается измеряемое в данный момент принимаемое напряжение (NOW), но мощность не может подаваться с учетом среднего значения и максимального значения колебаний зазора, соответственно, оцененных из множества операций подачи мощности в прошлом. Фиг. 12A соответствует состоянию горения красного сигнала на этапе S57, показанном на фиг. 11A.
[0083] На фиг. 12B, каждая из первой стрелки 31 и второй стрелки 32 указывает область 30 возможности подачи мощности, и третья стрелка 33 указывает область 29 невозможности подачи мощности. Следовательно, согласно отображаемому изображению, показанному на фиг. 12B, можно представлять пользователю то, что мощность может подаваться, даже если возникает колебание зазора, равное или меньшее среднего значения колебания зазора, но мощность не может подаваться, если возникает колебание зазора, равное или большее среднего значения колебания зазора. Фиг. 12B соответствует состоянию горения желтого сигнала на этапе S59, показанном на фиг. 11A.
[0084] На фиг. 12C, все первые стрелки 31, вторые стрелки 32 и третьи стрелки 33 указывают на область 30 возможности подачи мощности. Следовательно, согласно отображаемому изображению, показанному на фиг. 12C, можно представлять пользователю то, что мощность может подаваться, даже если возникает колебание зазора, идентичное максимальному значению колебаний зазора, соответственно, оцененных из множества операций подачи мощности в прошлом. Фиг. 12C соответствует состоянию горения зеленого сигнала на этапе S61, показанном на фиг. 11A.
[0085] Таким образом, устройство помощи при парковке помогает в совмещении между катушками посредством представления результата сравнения между вторым опорным значением (второй стрелкой 32 и третьей стрелкой 33), полученным посредством соответствующего вычитания среднего значения (Vgap_ave) и максимального значения (Vgap_max) разности потенциалов из текущего принимаемого напряжения (первой стрелки 31), и минимальным принимаемым напряжением (V0: границей между областями 29 и 30), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора, пассажиру. Соответственно, устройство помощи при парковке согласно вариантам осуществления может понятно представлять то, может или нет подаваться мощность.
[0086] Затем, фиг. 13A-13C показывают примеры изображений уровнемера, включающих в себя четыре области (29, 34, 35, 36) и первую стрелку 31, которая перемещается в продольном направлении вдоль четырех областей (29, 34, 35, 36), разделенных в продольном направлении. Четыре области включают в себя первую область 29 невозможности подачи мощности, вторые области 34 невозможности подачи мощности, первые области 35 возможности подачи мощности и вторые области 36 возможности подачи мощности. Первая область 29 невозможности подачи мощности указывает то, что мощность не может подаваться даже в случае, если отсутствует колебание зазора, поскольку остается измеряемое в данный момент принимаемое напряжение (NOW). Вторая область 34 невозможности подачи мощности указывает то, что мощность не может подаваться, с учетом среднего значения колебаний зазора, оцененных из множества операций подачи мощности в прошлом. Первая область 35 возможности подачи мощности указывает то, что мощность может подаваться с учетом среднего значения колебаний зазора, но мощность не может подаваться с учетом максимального значения колебаний зазора во множестве операций подачи мощности в прошлом. Вторая область 36 возможности подачи мощности указывает то, что мощность может подаваться даже с учетом максимума колебаний зазора.
[0087] Граница между первой областью 29 невозможности подачи мощности и второй областью 34 невозможности подачи мощности указывает минимальное допустимое напряжение V0. Граница между второй областью 34 невозможности подачи мощности и первой областью 35 возможности подачи мощности указывает значение (первое опорное значение), полученное посредством суммирования среднего значения (Vgap_ave) разности потенциалов с минимальным допустимым напряжением V0. Граница между первой областью 35 возможности подачи мощности и второй областью 36 возможности подачи мощности указывает значение (первое опорное значение), полученное посредством суммирования максимального значения (Vgap_max) разности потенциалов с минимальным допустимым напряжением V0.
[0088] На фиг. 13A, первая стрелка 31 указывает вторую область 34 невозможности подачи мощности. Фиг. 13A представляет пользователю то, что мощность может подаваться в случае, если оно является идентичным принимаемому напряжению (NOW), измеряемому в данный момент, но мощность не может подаваться, если возникает колебание зазора, которое составляет среднее значение (Vgap_ave) разности потенциалов. Фиг. 13A соответствует состоянию горения красного сигнала на этапе S57, показанном на фиг. 11A.
[0089] На фиг. 13B, первая стрелка 31 указывает первую область 35 возможности подачи мощности. Фиг. 13B представляет пользователю то, что мощность может подаваться, даже если возникает колебание зазора, которое составляет среднее значение (Vgap_ave) разности потенциалов, но мощность не может подаваться, если возникает колебание зазора, которое составляет максимальное значение (Vgap_max) разности потенциалов. Фиг. 13B соответствует состоянию горения желтого сигнала на этапе S59, показанном на фиг. 11A.
[0090] На фиг. 13C, первая стрелка 31 указывает вторую область 36 возможности подачи мощности. Фиг. 13C представляет пользователю то, что мощность может подаваться, даже если возникает колебание зазора, которое составляет максимальное значение (Vgap_max) разности потенциалов. Фиг. 13C соответствует состоянию горения зеленого сигнала на этапе S61, показанном на фиг. 11A.
[0091] Таким образом, устройство помощи при парковке помогает в совмещении между катушками посредством представления результата сравнения между текущим принимаемым напряжением (NOW: первой стрелкой 31) и первым опорным значением (границей между областями 34 и 35), полученным посредством суммирования среднего значения (Vgap_ave) разности потенциалов с минимальным принимаемым напряжением (V0: границей между областями 29 и 34), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора, пассажиру. Соответственно, устройство помощи при парковке согласно вариантам осуществления может понятно представлять то, может или нет подаваться мощность.
[0092] Устройство помощи при парковке помогает в совмещении между катушками посредством представления результата сравнения между текущим принимаемым напряжением (NOW: первой стрелкой 31) и первым опорным значением (границей между областями 35 и 36), полученным посредством суммирования максимального значения (Vgap_max) разности потенциалов с минимальным принимаемым напряжением (V0: границей между областями 29 и 34), так что может определяться то, что мощность может подаваться, если отсутствует колебание зазора, пассажиру. Соответственно, устройство помощи при парковке согласно вариантам осуществления может понятно представлять то, может или нет подаваться мощность.
[0093] Хотя вышеприведенные описания предоставлены касательно содержания настоящего изобретения на основе вариантов осуществления, настоящее изобретение не ограничено тем, что описано, и специалистам в данной области техники должно быть очевидным, что различные модификации и улучшения могут осуществляться в настоящем изобретении.
[0094] Как показано на фиг. 10, в первом и втором вариантах осуществления, период 43 времени для выполнения помощи при парковке за исключением нового одновременно представляет собой период 41 времени для измерения принимаемого напряжения (Vt0: второго принимаемого напряжения). Настоящее изобретение не ограничено этим примером. Таким образом, только при выборе пользователем, может измеряться принимаемое напряжение (т.е. второе принимаемое напряжение Vt0, третье принимаемое напряжение Vt1). Например, переключатель выбора режима для включения/выключения режима оценки для оценки значения колебания зазора предоставляется на приборной панели. Только тогда, когда переключатель выбора режима управляется пользователем, и в силу этого режим оценки активируется, принимаемое напряжение (второе принимаемое напряжение Vt0, третье принимаемое напряжение Vt1) может измеряться и сохраняться. Следовательно, в первом варианте осуществления, возможность подачи мощности определяется на основе последней разности потенциалов в разностях (Vgap) потенциалов, определенных в состоянии, в котором режим оценки находится во включенном состоянии. Во втором варианте осуществления, возможность подачи мощности определяется на основе среднего значения (Vgap_ave) и максимального значения (Vgap_max), вычисленных посредством использования всех разностей (Vgap) потенциалов, определенных в состоянии, в котором режим оценки находится во включенном состоянии. Соответственно, поскольку сам пользователь может определять оцененное значение колебания зазора, используемого во время помощи при парковке в соответствии с ситуацией использования транспортного средства 2, может повышаться удобство пользователя.
[0095] Устройство помощи при парковке (модуль управления) может быть реализовано посредством микрокомпьютера, включающего в себя центральный процессор (CPU), запоминающее устройство и модуль ввода-вывода. Компьютерная программа для функционирования микрокомпьютера в качестве устройства помощи при парковке устанавливается в микрокомпьютере для выполнения в нем. В силу этого, такой микрокомпьютер может функционировать в качестве устройства помощи при парковке. Хотя пример реализации устройства помощи при парковке посредством программного обеспечения показан в данном документе, естественно, также можно подготавливать аппаратные средства для исключительного использования для выполнения каждой обработки информации, показанной в дальнейшем, чтобы конфигурировать устройство помощи при парковке. Кроме того, множество схем, включенных в устройство помощи при парковке, могут быть сконфигурированы с отдельными аппаратными средствами. Кроме того, устройство помощи при парковке также может служить в качестве электронного модуля управления (ECU), используемого для другого управления в связи с транспортным средством. Контроллер 4 транспортного средства (модуль управления), показанный на фиг. 1, примерно иллюстрируется в качестве такого электронного модуля управления (ECU), используемого для другого управления в отношении транспортного средства 2.
Список номеров ссылок
[0096] 2 - транспортное средство
4 - контроллер транспортного средства (модуль управления)
8 - датчик тока/напряжения (датчик напряжения)
11 - катушка на стороне транспортного средства (приемная катушка)
12 - катушка на стороне земли (катушка для передачи мощности)
32 - вторая стрелка (второе опорное значение)
33 - третья стрелка (второе опорное значение)
NOW - первое принимаемое напряжение
Vgap - разность потенциалов
Vgap_ave - среднее значение разности потенциалов
Vgap_max - максимальное значение разности потенциалов
Vt0 - второе принимаемое напряжение
Vt1 - третье принимаемое напряжение
V0 - минимальное допустимое напряжение
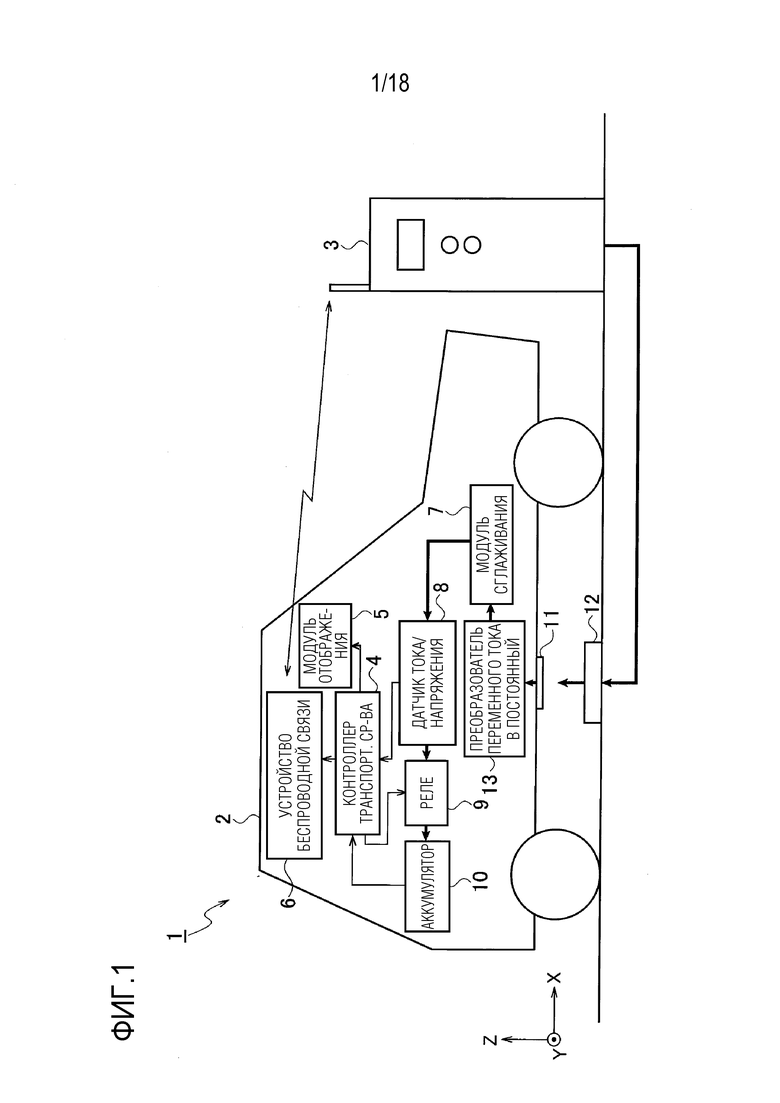
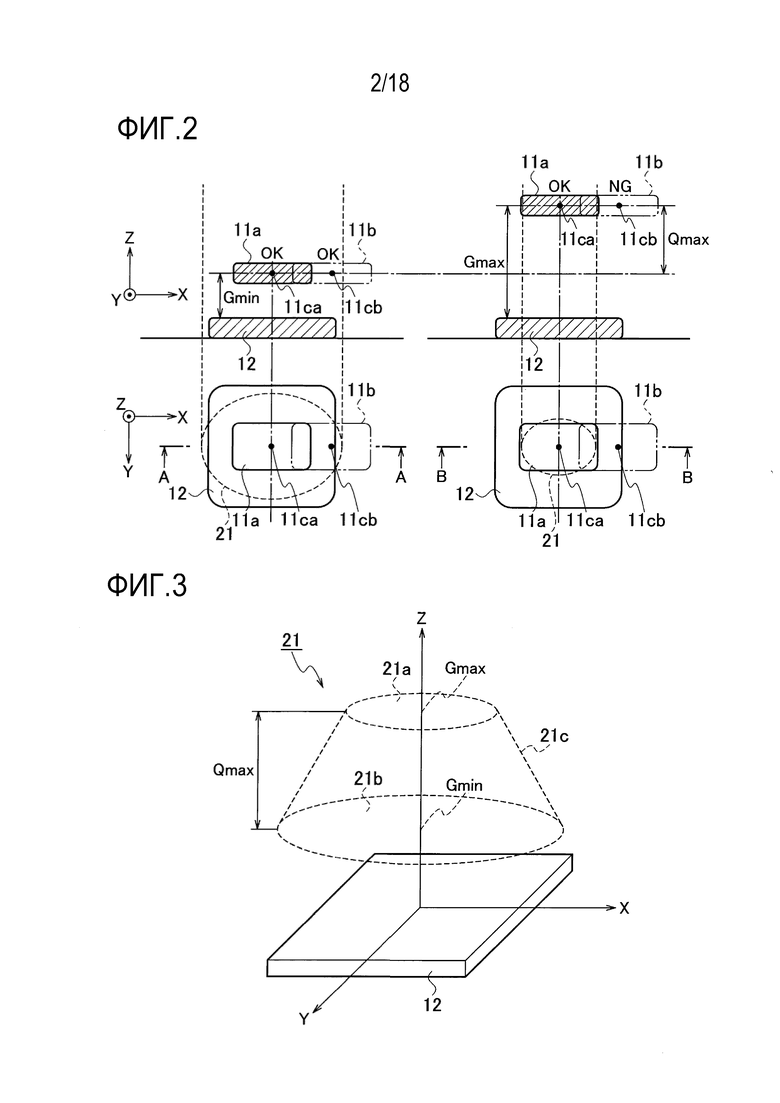
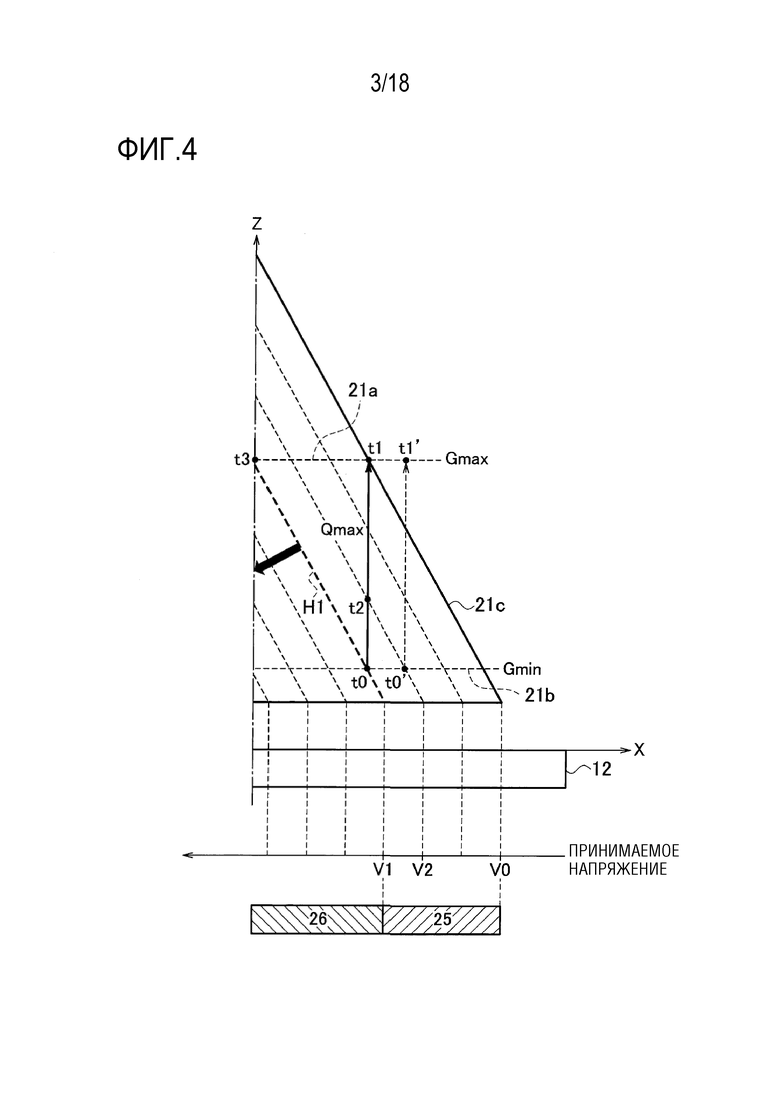
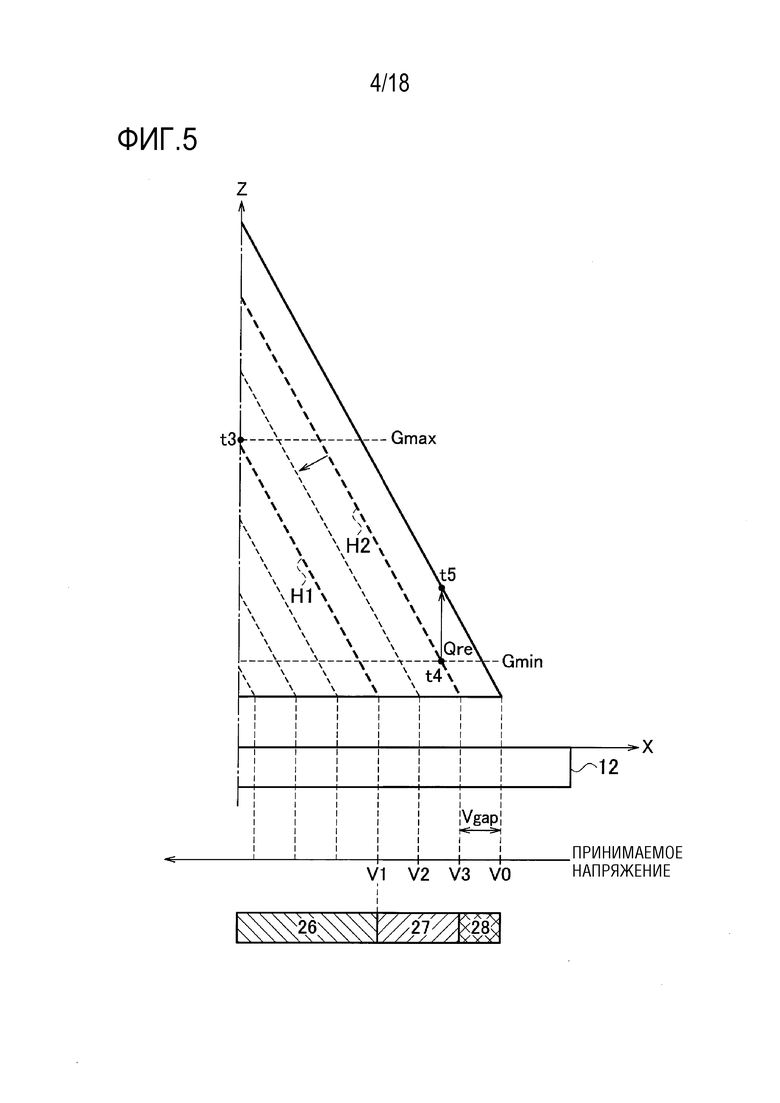
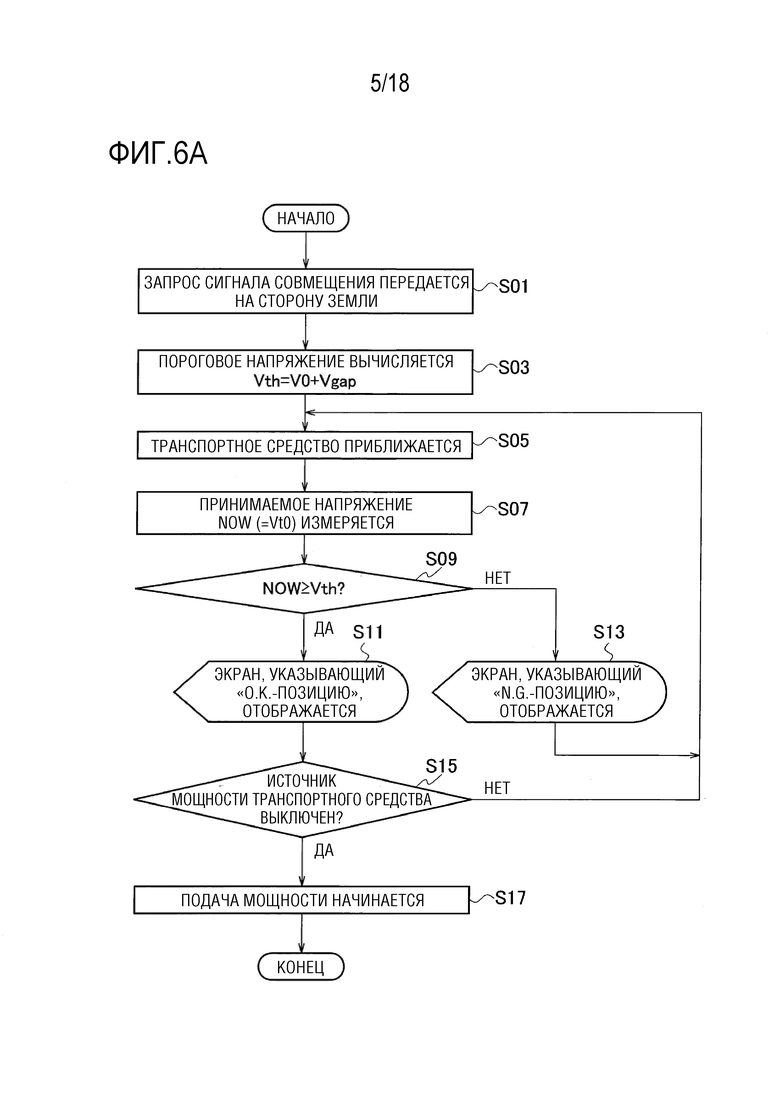
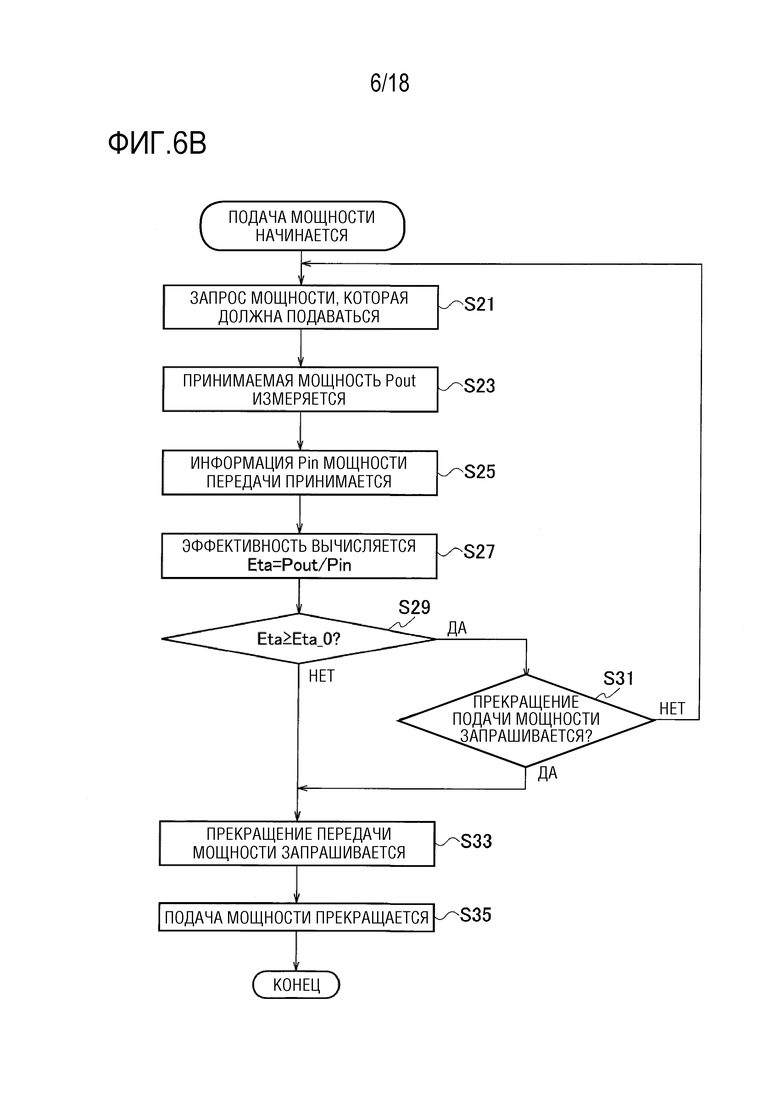
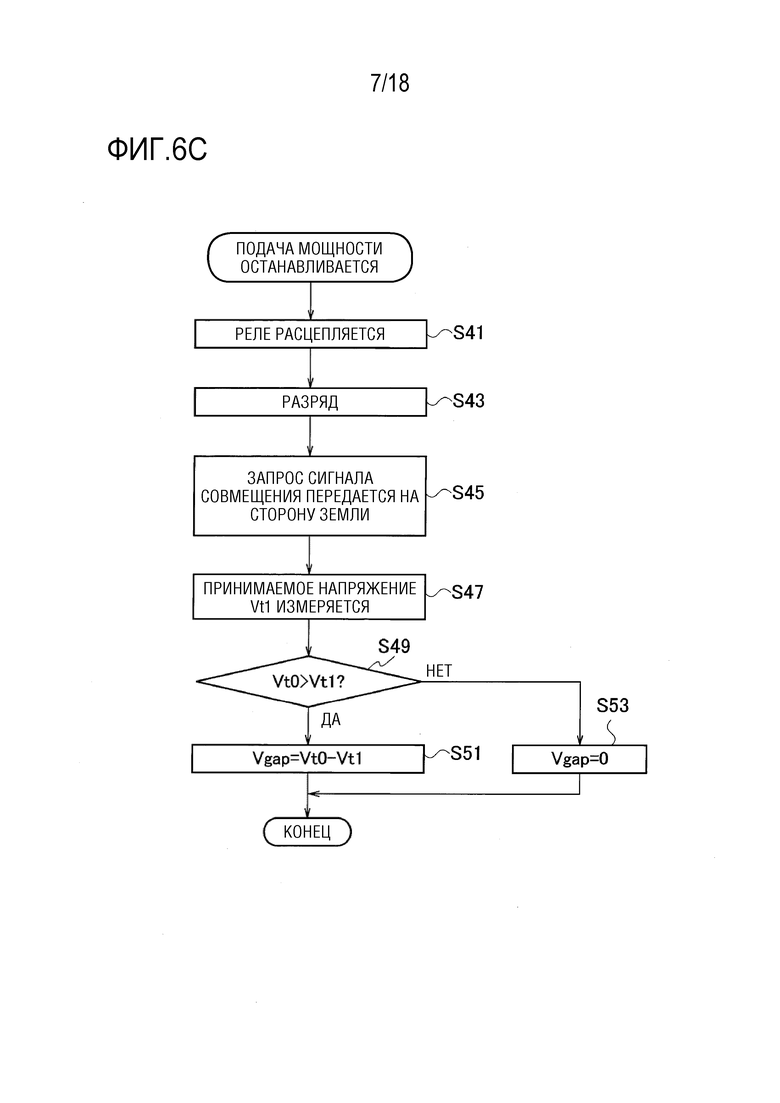
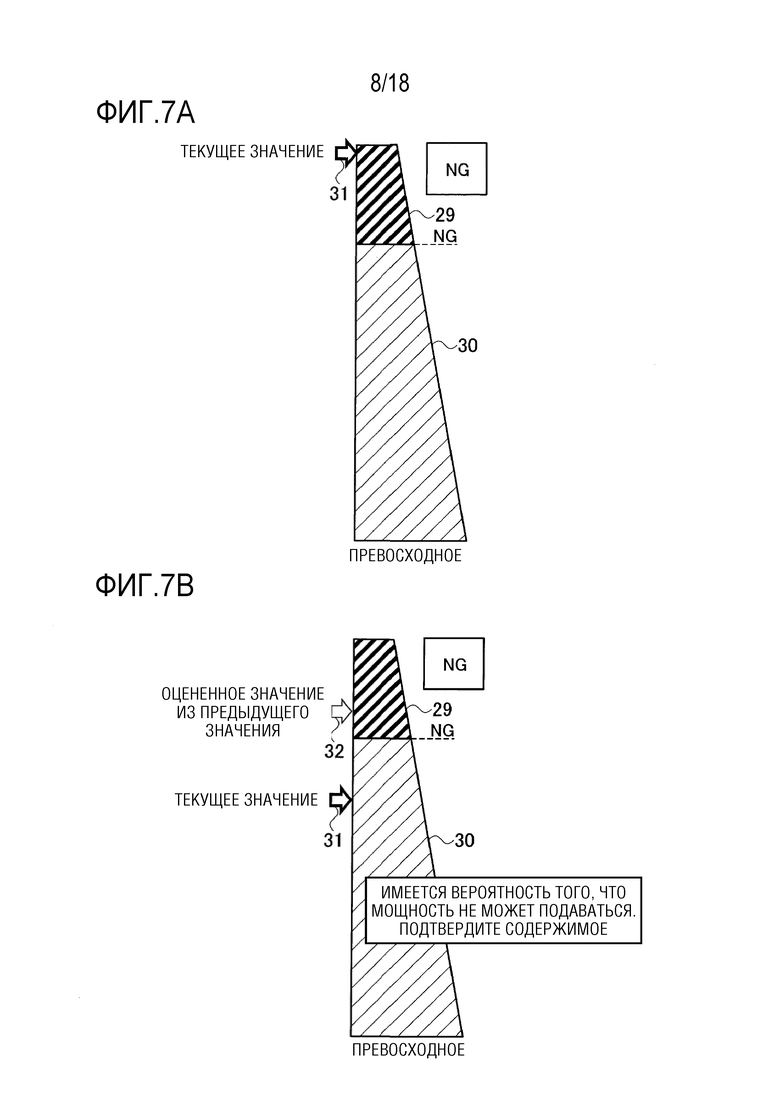
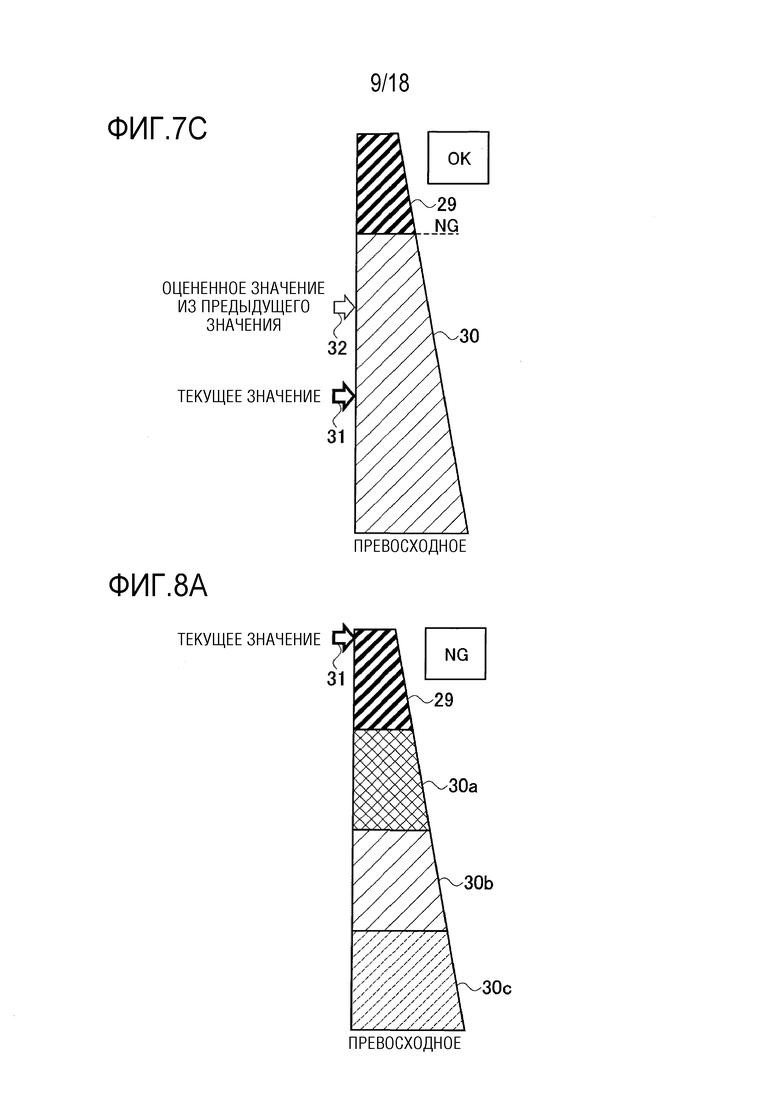
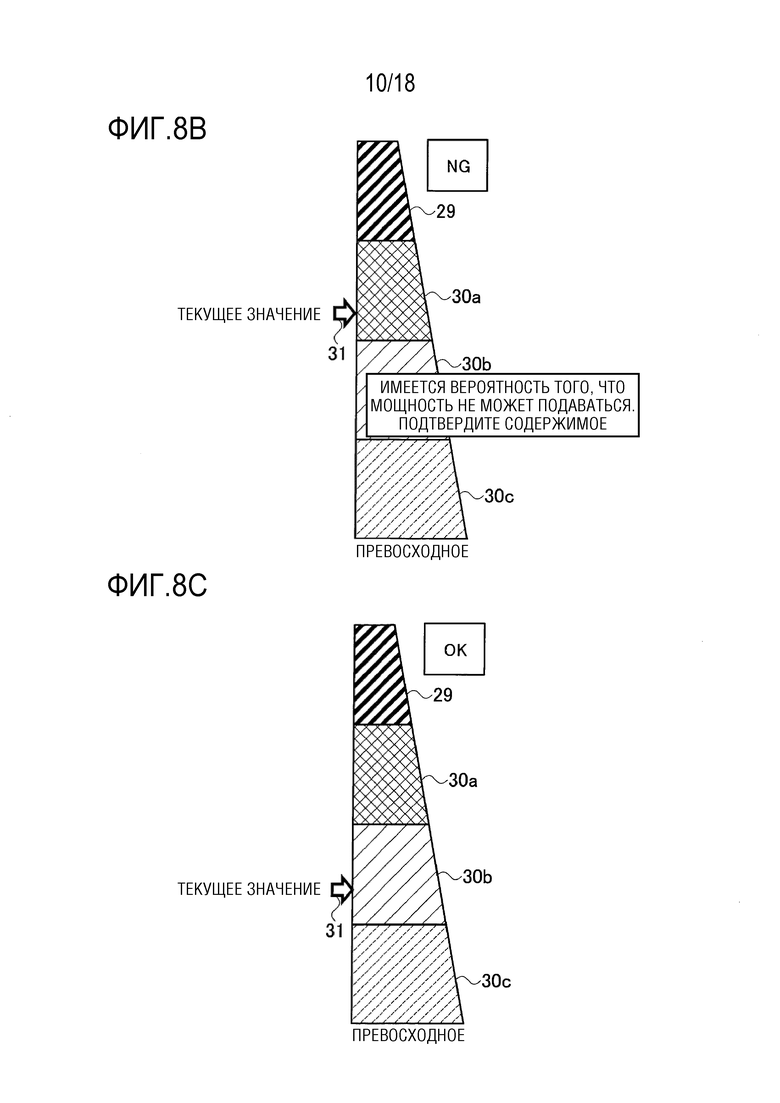
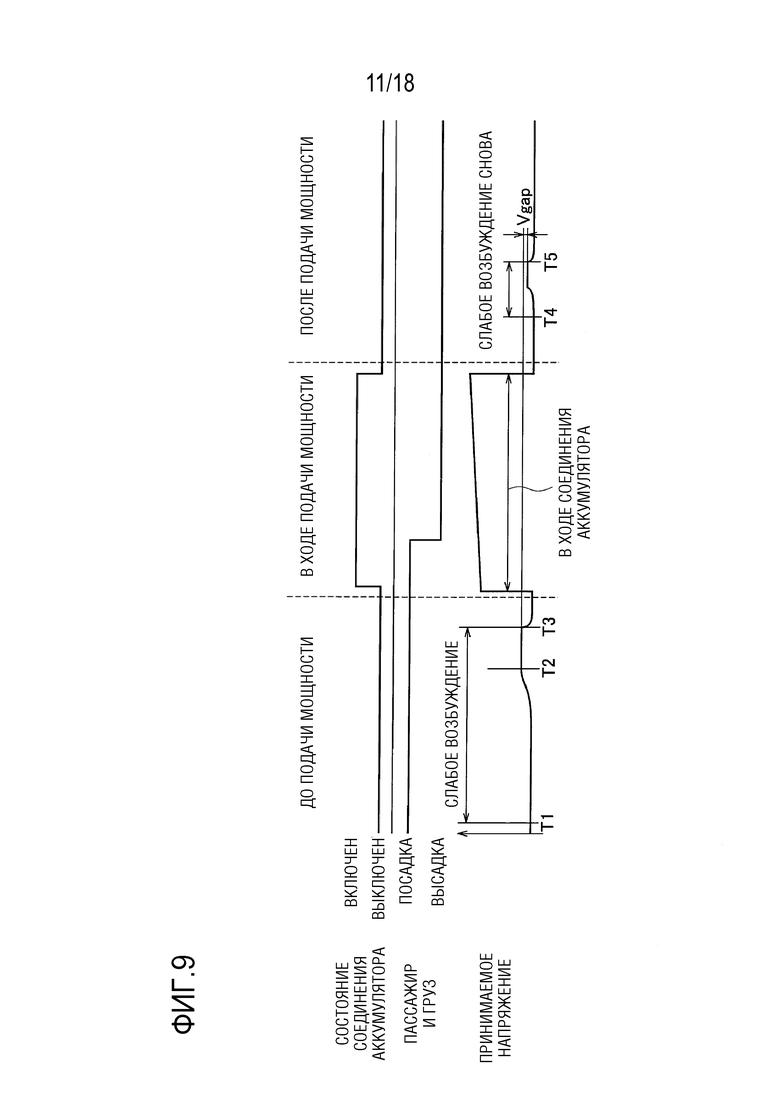
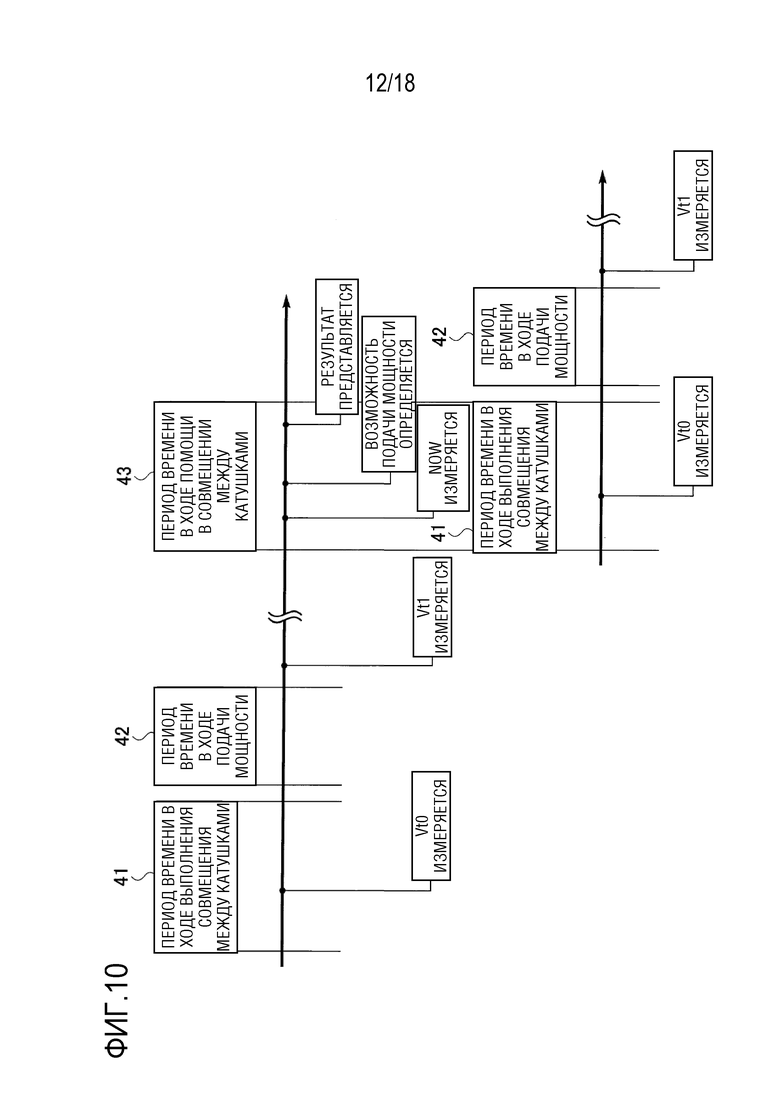
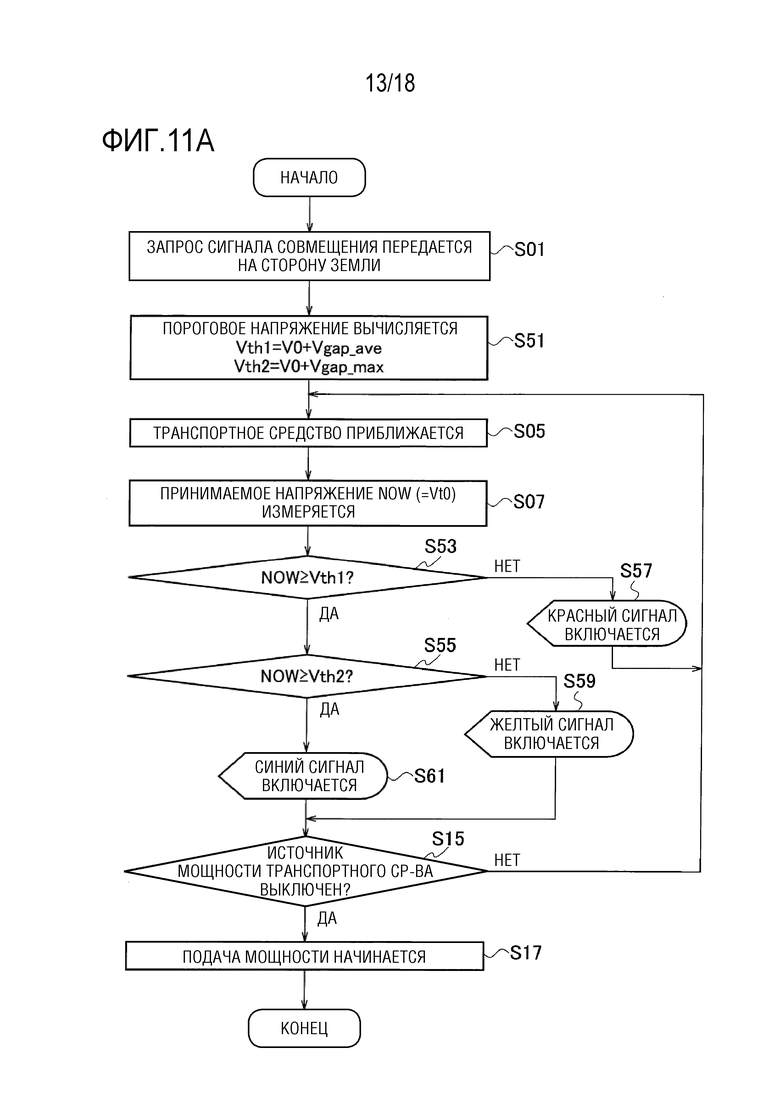
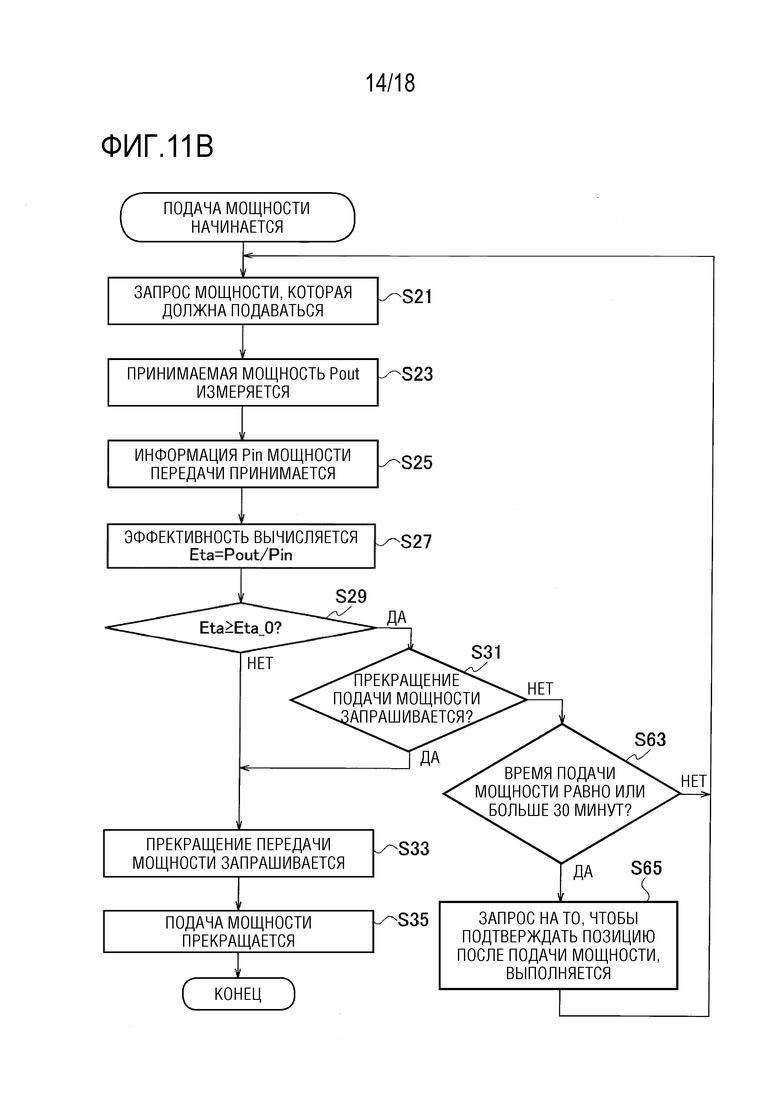
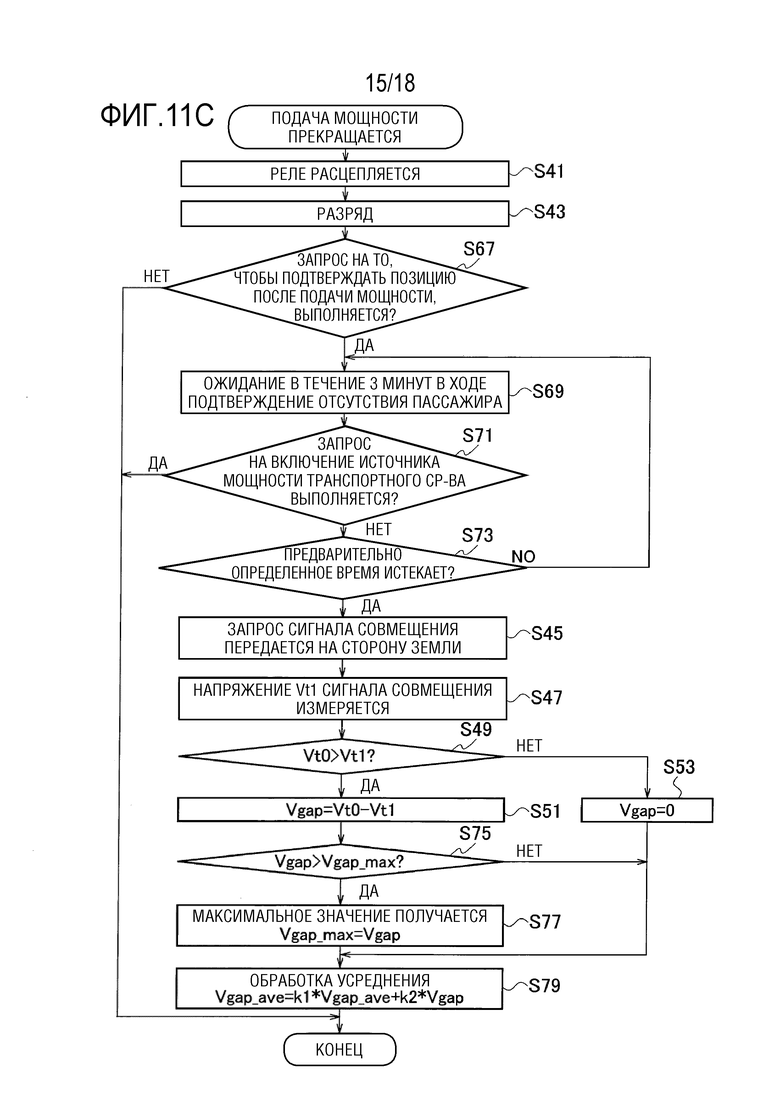
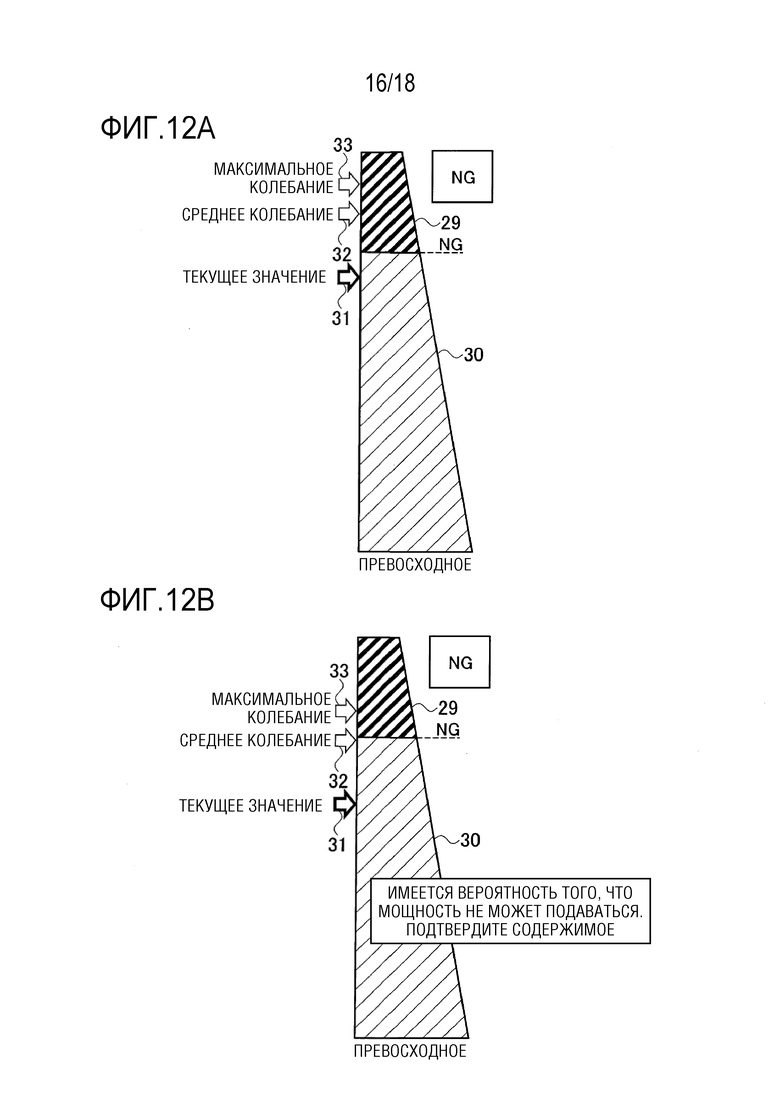
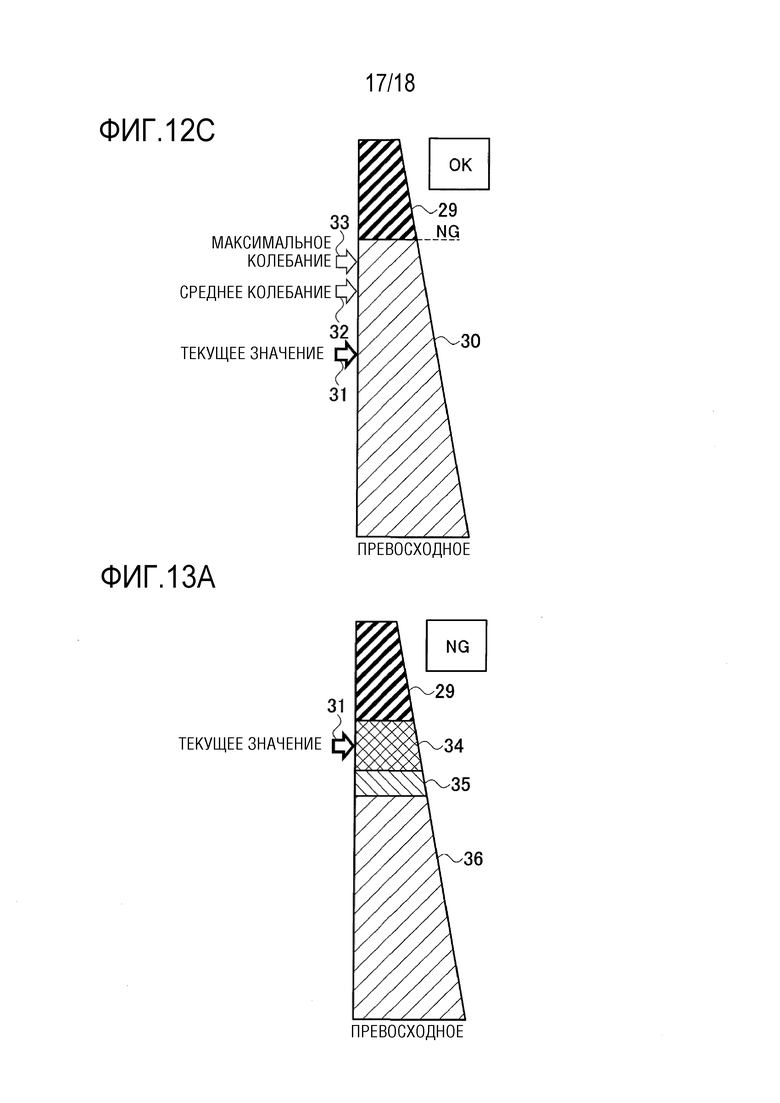
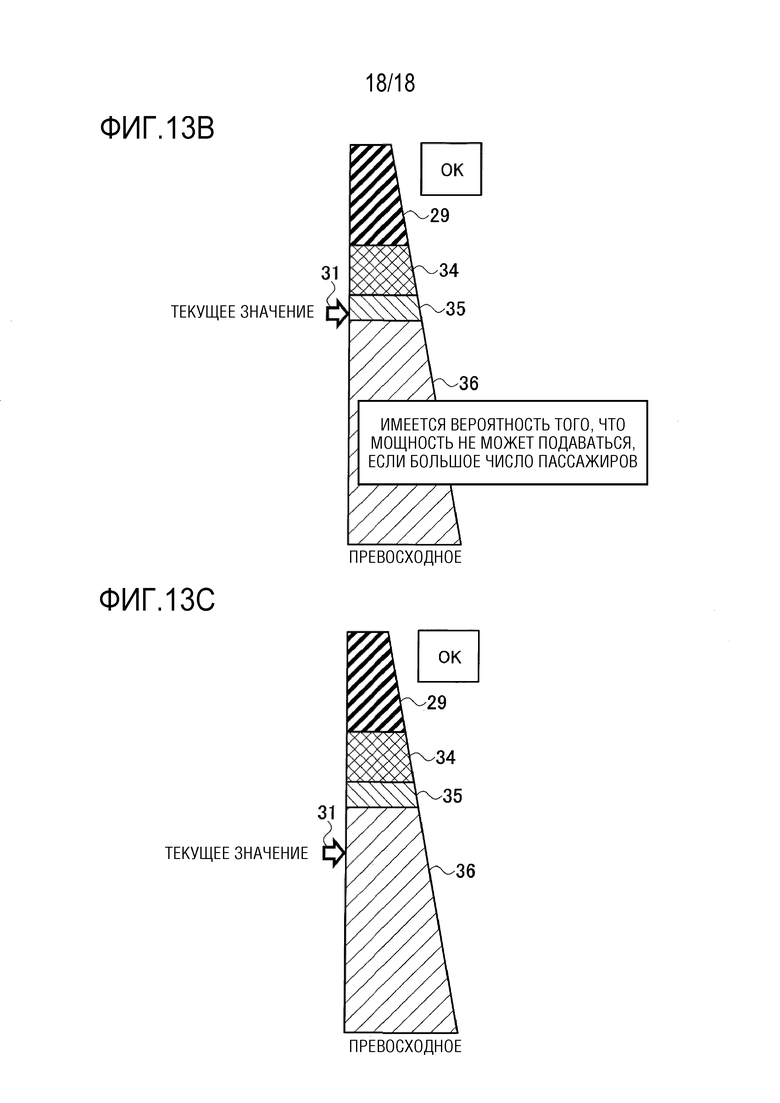
Изобретение относится к способу и устройству помощи при парковке. Способ помощи при парковке для помощи в совмещении между катушками при парковке транспортного средства в месте для парковки, содержащем катушку для передачи мощности. Способ содержит этапы, на которых измеряют первое принимаемое напряжение и помогают в совмещении между катушками посредством представления пассажиру транспортного средства результата определения того, может или нет подаваться мощность, на основе разности потенциалов и первого принимаемого напряжения. При этом заранее полученная разность потенциалов представляет собой разность потенциалов между вторым принимаемым напряжением приемной катушки и третьим принимаемым напряжением приемной катушки. Устройство помощи при парковке содержит датчик напряжения, выполненный с возможностью измерять первое принимаемое напряжение, сформированное в приемной катушке, и модуль управления, выполненный с возможностью помогать в совмещении между катушками посредством представления пассажиру транспортного средства результата определения того, может или нет подаваться мощность. Достигается повышение безопасности водителя при парковке. 2 н. и 5 з.п. ф-лы, 25 ил.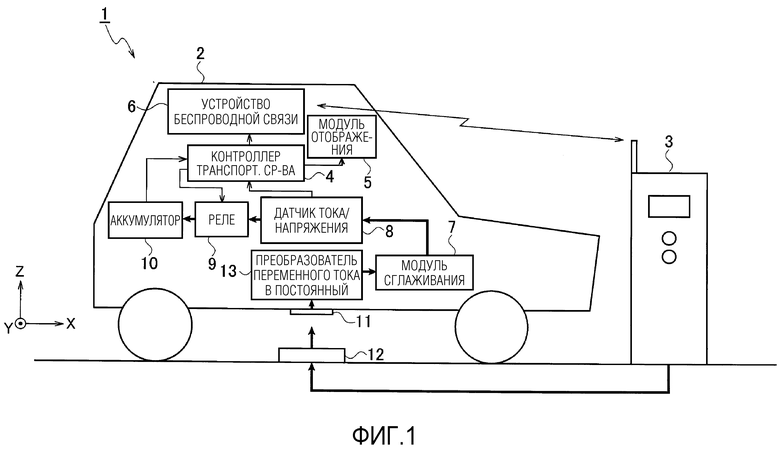
1. Способ помощи при парковке для помощи в совмещении между катушками при парковке транспортного средства в месте для парковки, содержащем катушку для передачи мощности, причем катушка для передачи мощности выполнена с возможностью подавать мощность беспроводным способом в приемную катушку, причем приемная катушка смонтирована в транспортном средстве, при этом способ помощи при парковке содержит этапы, на которых:
- измеряют первое принимаемое напряжение, сформированное в приемной катушке; и
- помогают в совмещении между катушками посредством представления пассажиру транспортного средства результата определения того, может или нет подаваться мощность, на основе разности потенциалов, полученной заранее, и первого принимаемого напряжения, при этом:
заранее полученная разность потенциалов представляет собой разность потенциалов между вторым принимаемым напряжением приемной катушки, измеряемым, когда совмещение между катушками выполняется до помощи в совмещении между катушками, и третьим принимаемым напряжением приемной катушки, измеряемым после того, как совмещение и подача мощности завершаются.
2. Способ помощи при парковке по п. 1, в котором:
- первое принимаемое напряжение, сформированное в приемной катушке, измеряется, когда катушка для передачи мощности возбуждается, чтобы обнаруживать позицию катушки, и
- помощь в совмещении катушек осуществляется посредством представления результата сравнения между первым принимаемым напряжением и первым опорным значением пассажиру, причем первое опорное значение получается посредством суммирования разности потенциалов с наименьшим напряжением, которое представляет собой напряжение, которое формируется в приемной катушке, и может определяться то, что мощность может подаваться, если отсутствует колебание зазора в вертикальном направлении между приемной катушкой и катушкой для передачи мощности.
3. Способ помощи при парковке по п. 1, в котором:
- первое принимаемое напряжение, сформированное в приемной катушке, измеряется, когда катушка для передачи мощности возбуждается, чтобы обнаруживать позицию катушки, и
- помощь в совмещении катушек осуществляется посредством представления пассажиру результата сравнения между вторым опорным значением, полученным посредством вычитания разности потенциалов из первого принимаемого напряжения, и наименьшим напряжением, которое представляет собой напряжение, которое формируется в приемной катушке, и может определяться то, что мощность может подаваться, если отсутствует колебание зазора в вертикальном направлении между приемной катушкой и катушкой для передачи мощности.
4. Способ помощи при парковке по любому из пп. 1-3, в котором:
- множество пар второго принимаемого напряжения и третьего принимаемого напряжения измеряются до помощи в совмещении между катушками, и
- разность потенциалов, вычисленная заранее, составляет среднее значение разностей потенциалов между упомянутым множеством измеряемых пар.
5. Способ помощи при парковке по любому из пп. 1-3, в котором:
- множество пар второго принимаемого напряжения и третьего принимаемого напряжения измеряются до помощи в совмещении между катушками, и
- разность потенциалов, вычисленная заранее, составляет максимальное значение разностей потенциалов между упомянутым множеством измеряемых пар.
6. Способ помощи при парковке по любому из пп. 1-3, в котором:
- при помощи в совмещении между катушками измеряется второе принимаемое напряжение, которое должно использоваться при помощи в совмещении между катушками в следующий раз.
7. Устройство помощи при парковке, выполненное с возможностью помогать в совмещении между катушками при парковке транспортного средства в месте для парковки, содержащем катушку для передачи мощности, причем катушка для передачи мощности выполнена с возможностью подавать мощность беспроводным способом в приемную катушку, причем приемная катушка смонтирована в транспортном средстве, при этом устройство помощи при парковке содержит:
- датчик напряжения, выполненный с возможностью измерять первое принимаемое напряжение, сформированное в приемной катушке; и
- модуль управления, выполненный с возможностью помогать в совмещении между катушками посредством представления пассажиру транспортного средства результата определения того, может или нет подаваться мощность, на основе разности потенциалов, полученной заранее, и первого принимаемого напряжения, при этом:
заранее полученная разность потенциалов представляет собой разность потенциалов между вторым принимаемым напряжением приемной катушки, измеряемым, когда совмещение между катушками выполняется до помощи в совмещении между катушками, и третьим принимаемым напряжением приемной катушки, измеряемым после того, как совмещение и подача мощности завершаются.
| JP 2011254633 A, 15.12.2011 | |||
| US 8248027 B2, 21.08.2012 | |||
| JP 2013005539 A, 07.01.2013. |

