ОБЛАСТЬ ТЕХНИКИ
Это раскрытие относится к стратегиям содействия парковке, которые учитывают радиус шины.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства могут быть оснащены системой содействия парковке. Система содействия парковке может быть выполнена с возможностью идентифицировать препятствия и регистрировать расстояние между препятствиями и транспортным средством, а также идентифицируя место парковки. Система содействия парковке может содействовать водителю в перемещении транспортного средства в направлении идентифицированного места парковки, при этом избегая препятствий.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В по меньшей мере одном варианте осуществления, предусмотрено транспортное средство. Транспортное средство может включать в себя силовую передачу, систему рулевого управления и контроллер. Контроллер может быть запрограммирован управлять силовой передачей и системой рулевого управления, чтобы направлять транспортное средство на место парковки для завершения ездового цикла. Транспортное средство может направляться на место парковки на основании радиуса стандартной шины, угловой скорости шины, полученной во время ездового цикла, в ответ на угол рулевого управления системы рулевого управления, превышающий пороговое значение, и скорости транспортного средства по колесам и GPS (глобальной системе определения местоположения) для ездового цикла.
Транспортное средство может дополнительно содержать датчик скорости вращения колеса, расположенный ближе к шине, расположенной на расстоянии от стандартной шины; и датчик парковки, выполненный с возможностью идентифицировать место парковки, при этом, контроллер может быть дополнительно запрограммирован предоставлять радиус стандартной шины до идентификации датчиком парковки места парковки, и при этом, радиус стандартной шины основан на угловой скорости рыскания, ширине колеи и угловой скорости шины.
Контроллер может быть дополнительно запрограммирован направлять транспортное средство на место парковки дополнительно на основании радиуса стандартной шины и угловой скорости шины у шины, расположенной на расстоянии от стандартной шины.
Контроллер может быть дополнительно запрограммирован направлять транспортное средство на место парковки на основании скорости транспортного средства по GPS, угловой скорости шины, угловой скорости шины, расположенной на расстоянии от стандартной шины, и оценки пробуксовки колес.
В по меньшей мере одном варианте осуществления, предусмотрена система содействия парковке транспортного средства. Система содействия парковке транспортного средства может включать в себя датчик парковки и контроллер. Датчик парковки может быть выполнен с возможностью идентифицировать место парковки относительно бордюрного камня. Контроллер может быть запрограммирован направлять транспортное средство на место парковки в ответ на запрос содействия парковке. Транспортное средство может направляться на основании угловой скорости рыскания, скорости транспортного средства по GPS, скорости вращения колес и исходного радиуса шины, так чтобы изменения радиуса шины от исходного радиуса шины не были причиной большего расстояния между парковочным местом и бордюрным камнем, чем предопределенное пороговое расстояние.
Исходный радиус шины может быть связан с эталонной шиной, расположенной ближе к заднему мосту транспортного средства.
Изменения радиуса шины от исходного радиуса шины могут быть основаны на исходном радиусе шины и первой и второй оценках радиуса шины, связанных с шиной, расположенной на расстоянии в поперечном направлении от эталонной шины.
Исходный радиус шины может быть основан на угловой скорости эталонной шины, ширине колеи транспортного средства и угловой скорости рыскания.
Первая оценка радиуса шины может быть основана на исходном радиусе шины, угловой скорости шины, расположенной на расстоянии от эталонной шины, и ширине колеи транспортного средства.
Вторая оценка радиуса шины может быть основана на скорости вращения колеса, скорости транспортного средства по GPS и эффективном крутящем моменте на колесе.
В по меньшей мере одном варианте осуществления, предусмотрен способ парковки. Способ парковки может включать в себя направление, посредством контроллера, транспортного средства в парковочное положение относительно бордюрного камня для завершения ездового цикла. Транспортное средство может направляться на основании угловой скорости рыскания, скорости транспортного средства по GPS, скорости вращения колес, ширины колеи и радиуса стандартной шины, так чтобы изменения радиуса шины от радиуса стандартной шины во время ездового цикла не были причиной большего расстояния между парковочным положением и бордюрным камнем, чем предопределенное пороговое расстояние.
При этом радиус стандартной шины может быть связан с эталонной шиной, расположенной ближе к заднему мосту транспортного средства.
Изменения радиуса шины от радиуса стандартной шины могут быть основаны на радиусе стандартной шины и первой и второй оценках радиуса шины, связанных с шиной, расположенной на расстоянии от эталонной шины.
Радиус стандартной шины может быть основан на угловой скорости эталонной шины, ширине колеи и угловой скорости рыскания.
Первая оценка радиуса шины может быть основана на радиусе стандартной шины, угловой скорости шины, расположенной на расстоянии от эталонной шины, и ширине колеи.
Вторая оценка радиуса шины может быть основана на скорости вращения колеса, скорости транспортного средства по GPS и эффективном крутящем моменте на колесе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
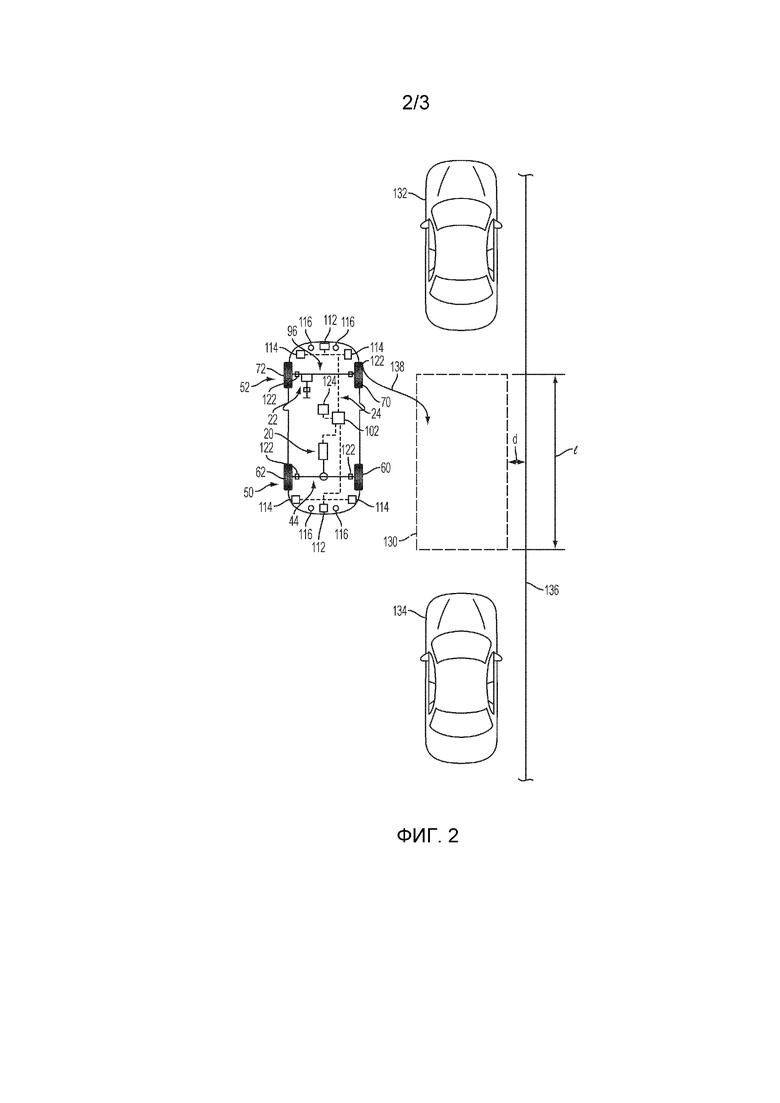
Фиг. 1 - примерный вариант осуществления транспортного средства, имеющего систему содействия парковке.
Фиг. 2 - вид в перспективе транспортного средства, ближайшего к месту парковки.
Фиг. 3 - блок-схема последовательности операций способа примерного способа парковки.
Как требуется, в материалах настоящей заявки раскрыты детальные варианты осуществления настоящего изобретения; однако, должно быть понятно, что раскрытые варианты осуществления являются всего лишь примером изобретения, которое может быть воплощено в различных и альтернативных формах. Фигуры не обязательно должны определять масштаб; некоторые признаки могут быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения.
Со ссылкой на фиг. 1, может быть предусмотрено транспортное средство 10. Транспортное средство 10 может быть моторным транспортным средством, таким как автомобиль, грузовой автомобиль, сельскохозяйственное оборудование или военное транспортное средство. Транспортное средство 10 может включать в себя силовую передачу 20, систему 22 рулевого управления и систему 24 содействия парковке.
Силовая передача 20 может выдавать крутящий момент на одно или более колесных узлов, чтобы приводить в движение транспортное средство 10. Силовая передача 20 может иметь гибридную конфигурацию, которая может применять многочисленные источники мощности, или негибридную конфигурацию. В негибридной конфигурации, силовая передача 20 может включать в себя двигатель 40, трансмиссию 42 и по меньшей мере один узел 44 ведущего моста.
Двигатель 40 может быть сконфигурирован в качестве двигателя внутреннего сгорания, который может быть приспособлен действовать с использованием любого пригодного типа топлива, такого как бензин, дизельное топливо, этиловый спирт, водород, и т. д. Двигатель 40 может выдавать мощность или движущий крутящий момент, который может использоваться для вращения одного или более колесных узлов для приведения в движение транспортного средства 10. Например, транспортное средство 10 может иметь первый колесный узел 50 и второй колесный узел 52, расположенный на расстоянии в продольном направлении от первого колесного узла 50. Обычно первый колесный узел 50 может указываться ссылкой как задний мост, а второй колесный узел 52 может указываться ссылкой как передний мост.
Первый колесный узел 50 может включать в себя первую шину 60, установленную на первом колесе. Первый колесный узел 50 может включать в себя вторую шину 62, установленную на втором колесе, расположенном на расстоянии в поперечном направлении от первой шины 60, установленной на первом колесе. Комбинация первой шины 60 и первого колеса может быть установлена с возможностью вращения на шасси транспортного средства посредством узла ступицы колеса.
Второй колесный узел 52 может включать в себя первую шину 70, установленную на первом колесе. Второй колесный узел 52 может включать в себя вторую шину 72, установленную на втором колесе, расположенном на расстоянии в поперечном направлении от первой шины 70. Комбинация первой шины 70 и первого колеса может быть установлена с возможностью вращения на шасси транспортного средства посредством узла ступицы колеса.
Трансмиссия 42 может быть связана с или присоединена с возможностью приведения в движение к двигателю 40. Трансмиссия 42 может быть иметь любой пригодный тип, такой как автоматическая или ручная трансмиссия с многочисленными передачами или ступенчатым передаточным отношением. В качестве используемого в материалах настоящей заявки, термин трансмиссия может включать в себя раздаточную коробку или дифференциал 78. Дифференциал 78 может предусматривать возможность многоколесного привода, полного привода, привода на передние колеса или привода на задние колеса.
Узел 44 ведущего моста может с возможностью вращения поддерживать первый колесный узел 50. Выход трансмиссии 42 может быть присоединен к входу дифференциала 78, функционально соединенного c узлом 44 ведущего моста приводным валом 80. В по меньшей мере одном варианте осуществления, транспортное средство 10 может быть снабжено узлом переднего ведущего моста, который может с возможностью вращения поддерживать второй колесный узел 52.
Система 22 рулевого управления может быть выполнена с возможностью шарнирно поворачивать или поворачивать второй колесный узел 52. Система 22 рулевого управления может включать в себя рулевое колесо 90, соединенное с возможностью вращения со вторым колесным узлом 52 через рулевой привод 92. Рулевой привод 92 может быть выполнен с возможностью поворачивать первое колесо и второе колесо второго колесного узла 52 вокруг оси шкворня, чтобы менять поворотное положение колес второго колесного узла 52.
Рулевой привод 92 может быть соединен с редуктором 94 рулевого управления. Редуктор 94 рулевого управления может быть соединен с рулевым механизмом 96. Рулевой механизм может быть присоединен к первому и второму колесам второго колесного узла 52. Рулевой механизм 96 может быть выполнен с возможностью поворачивать или шарнирно поворачивать первое колесо и второе колесо второго колесного узла 52 вокруг оси шкворня в ответ на вращение рулевого колеса 90. Рулевой механизм 96 может быть рулевым механизмом с реечной передачей, рулевым механизмом с циркулирующим шариком, рулевым механизмом с червяком и сектором, рулевым механизмом с переменным передаточным числом, системой рулевого управления с электроусилителем или другой конфигурацией, которая может поворачивать или шарнирно поворачивать колеса транспортного средства. Поворотное положение второго колесного узла 52 может быть показано в качестве углового положения α колес, а соответствующее поворотное положение рулевого колеса 90 может быть показано в качестве углового положения β рулевого колеса.
Электродвигатель 98 рулевого управления с усилителем может быть соединен с рулевым приводом 92 и/или редуктором 94 рулевого управления. Электродвигатель 98 рулевого управления с усилителем может быть выполнен с возможностью сообщать движение или прикладывать крутящий момент к системе 22 рулевого управления, чтобы поворачивать второй колесный узел 52. Электродвигатель 98 рулевого управления с усилителем может быть электродвигателем электроусилителя, выполненным с возможностью обеспечивать содействие, чтобы помогать водителю при поворачивании второго колесного узла 52 в ответ на поворачивание рулевого колеса 90. В по меньшей мере одном варианте осуществления, система 24 содействия парковке может быть выполнена с возможностью выполнять событие автоматической парковки, при котором электродвигатель 98 рулевого управления с усилителем поворачивает второй колесный узел 52, тем временем, система 24 содействия парковке оказывает воздействие на силовую передачу 20 для выполнения события парковки с или без вмешательства водителя.
Силовая передача 20 и система 22 рулевого управления может быть на связи с системой 24 содействия парковке. Система 24 содействия парковке может содействовать водителю транспортного средства 10 в преодолении возможных проблем, связанных с парковкой. Система 24 содействия парковке может содействовать водителю транспортного средства в выполнении маневра параллельной, перпендикулярной или другой парковки, чтобы направлять транспортное средство 10 на идентифицированное место парковки.
Система 24 содействия парковке может управляться контроллером 102 на связи с множеством датчиков транспортного средства. В по меньшей мере одном варианте осуществления, контроллер 102 может быть выполнен в качестве по меньшей мере одного процессора, связанного с модулем 104 антиблокировочной тормозной системы (ABS) или модулем 106 управления кузовом (BCM) или отдельным или обособленным модулем парковки. В по меньшей мере одном варианте осуществления, контроллер 102 может быть на связи с ABS 104 и/или BCM 106.
Множество датчиков транспортного средства может включать в себя камеру 112, датчик 114 парковки, датчик 116 присутствия или близости, датчик 118 бокового обзора, датчик 120 рулевого управления, датчик давления в шинах и датчик 122 скорости вращения колес. Контроллер 102 может быть на связи с множеством датчиков через проводные соединения, беспроводные соединения или может быть на связи с множеством датчиков через сеть шины CAN (локальной сети контроллеров).
Камера 112 может быть камерой заднего обзора, выполненной с возможностью выдавать информацию в отношении препятствий или объектов сзади от транспортного средства 10 водителю транспортного средства 10 через человеко-машинный интерфейс 124 (HMI) 124 и/или систему 24 содействия парковке. Камера 112 может быть расположена ближе к задней части транспортного средства 10. В по меньшей мере одном варианте осуществления, камера 112 может быть камерой переднего обзора, выполненной с возможностью выдавать информацию в отношении препятствий или объектов спереди от транспортного средства 10 в HMI 124 и/или систему 24 содействия парковке. HMI 124 может быть видеодисплейным экраном или комбинированной аудиовизуальной системой.
Датчик 114 парковки, датчик 116 присутствия или близости и датчик 118 бокового обзора могут быть датчиками, выполненными с возможностью идентифицировать место парковки. Датчик 114 парковки, датчик 116 присутствия или близости и/или датчик 118 бокового обзора могут быть ультразвуковыми датчиками, включающими в себя передатчик и приемник. Датчик 114 парковки, датчик 116 присутствия или близости и/или датчик 118 бокового обзора могут быть по меньшей мере одним из радиолокатора, лазерного локатора, оптического датчика, или тому подобного. Комбинация датчика 114 парковки, датчика 116 присутствия или близости и/или датчика 118 бокового обзора может быть расположена ближе к каждому углу транспортного средства 10. Эти датчики могут быть расположены, из условия чтобы датчики могли обеспечивать полное или почти полное покрытие датчиками вокруг транспортного средства 10. Например, датчики могут быть расположены ближе к переднему и заднему бамперам. Количество, тип и/или расположение множества датчиков могут меняться в зависимости от применения транспортного средства.
Датчик 120 рулевого управления может быть сконфигурирован в качестве датчика угла поворота рулевого колеса. Датчик 120 рулевого управления может быть расположен ближе к рулевому колесу 90 или может быть расположен ближе к редуктору 94 рулевого управления или рулевому механизму 96. Датчик 120 рулевого управления может быть выполнен с возможностью выдавать данные, указывающие поворот рулевого колеса 90, такие как угловое положение β рулевого колеса.
Датчик 122 скорости вращения колес может быть расположен ближе к колесу транспортного средства. Например, датчик 122 скорости вращения колес может быть расположен ближе к первой шине 60 и второй шине 62 первого колесного узла 50. Датчик 122 скорости вращения колес также может быть расположен ближе к первой шине 70 и второй шине 72 второго колесного узла 52. Датчик 122 скорости вращения колес может быть выполнен с возможностью выдавать частоту вращения или угловую скорость шины и соответственного колеса.
Со ссылкой на фиг. 2, показан соответственный вид транспортного средства, ближайшего к месту парковки. Водителю транспортного средств 10 может требоваться припарковать транспортное средство 10 в парковочное положение в пределах места 130 парковки, идентифицированного по меньшей мере одним из: камеры 112, датчика 114 парковки, датчика 116 присутствия или близости и датчика 118 бокового обзора. Место 130 парковки может быть определено первым объектом 132, вторым объектом 134 и бордюрным камнем 136. Первый объект 132 может быть первым припаркованным автомобилем спереди от места 130 парковки. Второй объект 134 может быть вторым припаркованным автомобилем сзади от места 130 парковки. Бордюрный камень 136 может быть прилегающим к месту парковки, первому объекту 132 и второму объекту 134. Система 24 содействия парковке может быть выполнена с возможностью определять траекторию транспортного средства или рассчитывать траекторию 138 управления для направления транспортного средства 10 в пределах места 130 парковки относительно комбинации первого объекта 132, второго объекта 134, бордюрного камня 136 и длины ℓ места парковки.
Транспортное средство 10 может подвергаться маневрированию на место 130 парковки вдоль траектории 138 управления. Траектория управления, используемая системой 24 содействия парковке, может рассчитываться или определяться посредством известных технологий. Примеры таких технологий расчета траектории управления показаны в публикации патента США на Толедо и других под № 20110260887 A1 и патенте США на Толедо и других под № 8169341 B2, содержание каждой из которых настоящим включено в состав посредством ссылки во всей своей полноте. Маневр парковки может включать в себя оказание воздействия системой 24 содействия парковке на работу силовой передачи 20 и систему 22 рулевого управления для перемещения транспортного средства 10 с остановки на место 130 парковки. Маневр парковки дополнительно может включать в себя перемещение транспортного средства 10 в пределах места 130 парковки и последующую остановку транспортного средства, определяющие парковочное положение относительно бордюрного камня 136.
Система 24 содействия парковке может пытаться припарковать транспортное средство 10 в пределах предопределенного порогового расстояния от бордюрного камня 136. Например, предопределенное пороговое расстояние от бордюрного камня 136 может быть расстоянием, таким как 30 см для удовлетворения ожиданий потребителя. Система 24 содействия парковке может учитывать радиус по меньшей мере одной шины, связанной с первым и вторым колесными узлами 50, 52. Изменения радиуса шины могут оказывать влияние на систему 24 содействия парковке при направлении транспортного средства 10, чтобы находилось в пределах предопределенного порогового расстояния от бордюрного камня 136.
Изменения радиуса шины могут быть результатом износа шины, изменений давления воздуха в шине, замены шины запасной шиной, повреждений шины или других проблем, которые могут оказывать влияние на радиус шины. Эти изменения радиуса шины могут размещать транспортное средство в парковочном положении или парковочном месте не в пределах предопределенного порогового расстояния от бордюрного камня 136 или со столкновением или переездом бордюрного камня 136 для завершения ездового цикла. Современные способы для оценки радиуса шины могут быть неспособны оценивать радиус шины без эксплуатации транспортного средства 10 в течение предопределенного периода времени или достижения предопределенного пройденного расстояния до того, как может быть получена оценка радиуса шины. В попытке улучшить оценки радиусов шин или оценки окружностей шин, система 24 содействия парковке может использовать слияние многочисленных способов, в том числе, выяснения угловой скорости рыскания, относительного изучения и изучения GPS. Способы могут применяться параллельно или последовательно и повторно, чтобы давать точную оценку радиусов шин или окружности шин во время ездового цикла, сравнивать оценку радиусов или окружности шин во время текущего ездового цикла и сравнивать ее с радиусами или окружностью шин из предыдущего ездового цикла, и обновлять систему 24 содействия парковке радиусами или окружностью из текущего ездового цикла.
Способ выяснения угловой скорости рыскания может быть выполнен с возможностью рассчитывать радиус эталонной шины, Rr. Радиус эталонной шины, Rr, может быть радиусом по меньшей мере одной из шин, связанных с первым колесным узлом 50 и вторым колесным узлом 52. Например, радиус эталонной шины, Rr, может быть радиусом первой шины 60 первого колесного узла 50 или радиусом первой шины 70 второго колесного узла 52. Радиус эталонной шины, Rr, может быть основан на изменениях от исходного радиуса шины или радиуса стандартной шины, узнанных из предыдущего ездового цикла, сохраненных в памяти.
Способ выяснения угловой скорости рыскания затем может узнавать радиус шины, расположенной на расстоянии в поперечном направлении от эталонной шины, расположенной ближе к тому же самому мосту, во время текущего ездового цикла. Способ выяснения угловой скорости рыскания затем может изучать оставшиеся радиусы шин транспортного средства с помощью способа относительного изучения.
Способ выяснения угловой скорости рыскания может быть выполнен с возможностью соотносить угловую скорость рыскания транспортного средства, ωz, скорость вращения эталонной шины, скорость вращения шины у шины, расположенной на расстоянии от эталонной шины, и ширину колеи транспортного средства, Tr, для оценивания радиуса эталонной шины, Rr. Угловая скорость рыскания транспортного средства, ωz, может выдаваться в систему 24 содействия парковке посредством BCM 106 или модулем управления устройствами пассивной безопасности транспортного средства, или автономным датчиком угловой скорости рыскания.
Скорость вращения эталонной шины может выдаваться датчиком 122 скорости вращения колеса, расположенным ближе к эталонной шине. Скорость вращения шины у шины, расположенной на расстоянии от эталонной шины, может выдаваться датчиком 122 скорости вращения колес, расположенного ближе к шине. Например, шина, расположенная на расстоянии от эталонной шины, может быть второй шиной 62 первого колесного узла 50 или может быть по меньшей мере одной из первой шины 70 или второй шины 72 второго колесного узла 52.
Ширина колеи транспортного средства, Tr, может быть поперечным расстоянием между центральной линией первой шины 60 первого колесного узла 50 и второй шины 62 первого колесного узла 50. Ширина колеи транспортного средства, Tr, может быть поперечным расстоянием между центральной линией первой шины 70 второго колесного узла 52 и второй шины 72 второго колесного узла 52. Ширина колеи транспортного средства, Tr, может быть предопределенным значением, запрограммированным в контроллер 102 и/или систему 24 содействия парковке. В по меньшей мере одном варианте осуществления, ширина колеи транспортного средства, Tr, может быть шириной полуколеи транспортного средства, HTr. Как подразумевает наименование, ширина полуколеи транспортного средства HTr, может быть половиной ширины колеи транспортного средства, Tr.
Способ выяснения угловой скорости рыскания может применяться в ответ на удовлетворение условий отсева. Условия отсева, которые могут удовлетворяться до применения способа выяснения угловой скорости рыскания, могут включать в себя угол рулевого управления, предоставленный датчиком 120 рулевого управления, являющийся большим, чем пороговый угол рулевого управления, скорость транспортного средства, являющуюся меньшей, чем пороговая скорость транспортного средства, или угловую скорость рыскания транспортного средства, ωz, являющуюся большей, чем пороговая угловая скорость рыскания транспортного средства. Условия отсева могут быть реализованы для минимизации ошибок в способах изучения радиуса шины. Система 24 содействия парковке может принимать радиус эталонной шины, Rr, на основании измеренного угла рулевого управления, угловой скорости рыскания транспортного средства, ωz, угловой скорости эталонной шины, ωR, и угловой скорости шины, ωT.
Способ выяснения угловой скорости рыскания может рассчитывать радиус эталонной шины, Rr, на основании Уравнения (1):
 (1)
(1)
γ может быть изученным отношением радиусов, узнанным во время прямолинейного вождения посредством способа относительного изучения. Мгновенные значения радиуса эталонной шины, Rr, могут суммироваться и усредняться. Окончательный радиус эталонной шины, Rr, может периодически обновляться во время ездового цикла. Способ относительного изучения может быть выполнен с возможностью рассчитывать первую оценку радиуса шины, Rf. Система 24 содействия парковке может быть выполнена с возможностью применять способ относительного изучения в ответ на транспортное средство 10, едущее приблизительно по прямой линии. Условия отсева, которые могут удовлетворяться до применения способа относительного изучения, могут включать в себя угол рулевого управления, предоставленный датчиком 120 рулевого управления, являющийся меньшим, чем пороговый угол рулевого управления, и скорость транспортного средства, являющуюся большей, чем пороговая скорость транспортного средства. Условия отсева могут подтверждать, что транспортное средство едет приблизительно прямолинейно с низкой величиной пробуксовки колес. Система 24 содействия парковке может принимать первую оценку радиуса шины, Rf, основанную на радиусе эталонной шины, Rr, или основанную на угловой скорости эталонной шины, ωR, и угловой скорости шины, ωT.
Способ относительного изучения может рассчитывать процентное различие размера радиуса шины, относительно радиуса эталонной шины, Rr, во время текущего ездового цикла. Способ относительного изучения может рассчитывать процентное различие размера на основании Уравнения (2):
 (2)
(2)
Мгновенные результаты процентного различия размера могут суммироваться и усредняться или фильтроваться. Заключительное значение относительного изменения размера может периодически обновляться во время ездового цикла. Способ относительного изучения затем может определять радиус шины, Rt, на основании процентного различия. Изученное отношение радиусов, γ, может рассчитываться в качестве отношения между радиусом шины, Rf, которая может быть расположена на расстоянии в поперечном направлении от эталонной шины, и радиусом эталонной шины, Rr. Изученное отношение радиусов, γ, затем может подаваться обратно в способ выяснения угловой скорости рыскания.
Способ изучения GPS может быть выполнен с возможностью рассчитывать вторую оценку радиуса шины, Rt, во время текущего ездового цикла. Способ изучения GPS может применяться в ответ на удовлетворение условий отсева. Условия отсева, которые могут удовлетворяться до применения способа изучения GPS, могут включать в себя скорость транспортного средства, являющуюся большей, чем пороговая скорость транспортного средства, угол рулевого управления, являющийся меньшим, чем пороговый угол рулевого управления, ускорение транспортного средства, являющееся меньшим, чем пороговое ускорение транспортного средства, или угловую скорость рыскания транспортного средства, являющуюся меньшей, чем пороговая угловая скорость рыскания транспортного средства. Эти условия отсева могут указывать, что транспортное средство 10 едет по прямой линии. Система 24 содействия парковке может принимать вторую оценку радиуса шины, Rt, основанную на скорости транспортного средства по GPS, угловой скорости шины, полученной во время ездового цикла, в ответ на угол рулевого управления системы 22 рулевого управления, превышающий пороговое значение, или оценку пробуксовки колеса шины. Скорость транспортного средства по GPS может быть скоростью транспортного средства, выведенной из модуля 108 GPS (гаверсинусной скоростью).
Способ изучения GPS может рассчитывать вторую оценку радиуса шины, Rt, на основании Уравнения (3):
 (3)
(3)
Где ωt - угловая скорость по меньшей мере одной из первой шины 60 и второй шины 62 первого колесного узла 50, и первой шины 70 и второй шины 72 второго колесного узла 52. Угловая скорость может выдаваться датчиком 122 скорости вращения колеса, расположенного ближе к соответственной шине.
где s - оценка пробуксовки колеса по меньшей мере одной шины, рассчитанная на основании Уравнения (4):
 (4)
(4)
Где T - эффективный крутящий момент на колесе по меньшей мере одной шины первого колесного узла 50 и второго колесного узла 52.
Где r - номинальный радиус шины по меньшей мере одной из шин транспортного средства, хранимый в памяти.
Где F - оцененная нормальная нагрузка, приложенная к по меньшей мере одной из шин транспортного средства.
Где C - продольная жесткость по меньшей мере одной из шин транспортного средства в качестве функции оцененного коэффициента трения поверхности дороги, μ, и предполагается постоянной.
Скорость транспортного средства по GPS может испытывать задержки во время событий ускорения и замедления транспортного средства. Задержка может компенсироваться системой 24 содействия парковке для избегания ошибки оценки радиуса. Задержка может компенсироваться посредством реализации способа интерполяции между двумя следующими друг за другом показаниями скорости, сохраняя предыдущее показание скорости из предыдущего повторения в памяти, например, СППЗУ (стираемом программируемом постоянном запоминающем устройстве, EPROM).
Система 24 содействия парковке может сравнивать результаты радиуса эталонной шины, Rr, первую оценку радиуса шины, Rf, и вторую оценку радиуса шины, Rt, друг с другом. Система 24 содействия парковке может отбирать по меньшей мере одну из первой оценки радиуса шины, Rf, и второй оценки радиуса шины, Rt, на основании зрелости оценки. Зрелой оценкой может быть оценка радиуса шины, которая бралась недавнее всего по времени или подвергалась выборке в течение более длительных периодов времени в течение ездового цикла. В по меньшей мере одном варианте осуществления, первая оценка радиуса шины, Rf, может сливаться с второй оценкой радиуса шины, Rt, согласно способу наименьших квадратов или другому статистическому способу, чтобы давать оценку радиуса шины, Re, которой может обновляться система 24 содействия парковке.
Система 24 содействия парковке может сравнивать относительную разность между радиусом стандартной (эталонной) шины, сохраненным в памяти, или радиусом эталонной шины и по меньшей мере одной из первой оценки радиуса шины, Rf, и второй оценки радиуса шины, Rt. Система 24 содействия парковке может обновлять алгоритм траектории управления оценкой радиуса шины, Re, или относительной разностью, если относительная разность является большей, чем пороговое значение относительной разности. Обновление алгоритма траектории управления может давать системе 24 содействия парковке возможность направлять транспортное средство в парковочное положение в пределах идентифицированного места 130 парковки относительно бордюрного камня 136, чтобы завершать ездовой цикл, из условия чтобы изменения радиуса шины от радиуса эталонной шины, Rr, не были причиной большего расстояния, d, между парковочным положением и бордюрным камнем 136, чем предопределенное пороговое расстояние.
Со ссылкой на фиг. 3, показан примерный способ парковки. Способ может принимать угол рулевого управления с датчика 120 рулевого управления и скорость вращения колеса с датчика 122 скорости вращения колеса или скорость транспортного средства из ABS 104 или BCM 106. В блоке 200 блок-схемы, способ может определять, поворачивает ли транспортное средство 10. Транспортное средство 10 может быть поворачивающим, если угол рулевого управления является большим, чем пороговое значение угла рулевого управления, а скорость транспортного средства является меньшей, чем пороговое значение скорости транспортного средства. Если транспортное средство 10 поворачивает, способ может продолжаться к блоку 202 блок-схемы.
В блоке 202 блок-схемы, способ может выдавать радиус эталонной шины, Rr. Радиус эталонной шины, Rr, может быть основан на угловой скорости эталонной шины, ωr, ширине колеи транспортного средства, Tr, и угловой скорости рыскания, ωz. В по меньшей мере одном варианте осуществления, радиус эталонной шины, Rr, может быть основан на угле рулевого управления транспортного средства, угловой скорости эталонной шины, ωr, и угловой скорости шины, ωt, у шины, расположенной на расстоянии от эталонной шины.
Если транспортное средство 10 не будет поворачивающим в блоке 200 блок-схемы, способ может продолжаться к блоку 204 блок-схемы. Транспортное средство 10 может не быть поворачивающим, если как угол рулевого управления является меньшим, чем пороговое значение угла рулевого управления, так и скорость транспортного средства является большей, чем пороговое значение скорости транспортного средства. Если транспортное средство 10 не поворачивает, способ может продолжаться к блокам 206 и 208 блок-схемы. Если как угол рулевого управления не будет меньшим, чем пороговое значение угла рулевого управления, так и скорость транспортного средства не будет большей, чем пороговое значение скорости транспортного средства, способ может заканчиваться.
Со ссылкой на блок 204 блок-схемы, если транспортное средство едет по прямой линии, способ может параллельно переходить к блокам 206 и 208 блок-схемы. В блоке 206 блок-схемы, способ может выдавать первую оценку радиуса шины, Rf. Первая оценка радиуса шины, Rf, может быть основана на радиусе эталонной шины, Rr, угловой скорости шины, ωt, у шины, расположенной на расстоянии от эталонной шины, и ширине колеи транспортного средства, Tr. В блоке 208 блок-схемы, способ может принимать по меньшей мере одну из скорости транспортного средства, выведенной из модуля 108 GPS, и скорости вращения колеса, выведенной с датчика 122 скорости вращения колеса. В блоке 210 блок-схемы, способ может выдавать вторую оценку радиуса шины, Rt. Вторая оценка радиуса шины, Rt, может быть основана на скорости вращения колеса, выводимой датчиком 122 скорости вращения колеса, скорости транспортного средства, выведенной из модуля 108 GPS, эффективного крутящего момента на колесе, T, угловой скорости шины, ωt, у шины, расположенной на расстоянии от эталонной шины, и оценки бокового увода шины, s.
В блоке 212 блок-схемы, способ может оценивать радиусы всех четырех колес и сохранять оценки в памяти. Способ может выполнять многочисленные повторы, чтобы узнавать каждый радиус шины с использованием описанных способов изучения. Например, способ может изучать все радиусы шин с использованием способа изучения GPS. Способ может изучать радиус шины у шины, расположенной на расстоянии в поперечном направлении от эталонной шины, с использованием способа выяснения угловой скорости рыскания. Способ может узнавать радиусы шин у шин, расположенных на расстоянии в продольном направлении от и размещенных на другом мосте, чем эталонная шина, с использованием способа относительного обучения.
В блоке 214 блок-схемы, способ может обновлять систему содействия парковке заключительной оценкой радиуса шины для каждой шины транспортного средства. Заключительная оценка радиуса шины может быть основана на слиянии по меньшей мере одной из оценок радиуса шины, предоставленной способом изучения GPS, способом выяснения угловой скорости рыскания и способом относительного изучения. Система 24 содействия парковке может обновлять алгоритм управления парковкой окончательной оценкой радиуса шины для всех шин. Система 24 содействия парковке, в ответ на идентификацию места 130 парковки, может направлять транспортное средство 10 вдоль траектории 138 управления в парковочное положение относительно места 130 парковки и бордюрного камня 136. Транспортное средство 10 может направляться на место 130 парковки, где траектория 138 управления может быть основана на алгоритме управления парковкой для завершения ездового цикла.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы изобретения. Предпочтительнее, словесные формулировки, используемые в описании изобретения, являются скорее словесными формулировками описания, нежели ограничения, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Дополнительно, признаки различных вариантов осуществления реализации могут комбинироваться для формирования дополнительных вариантов осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО, СИСТЕМА КОНТРОЛЯ ЗАПАСНОЙ ШИНЫ И СПОСОБ КОНТРОЛЯ ИСПОЛЬЗОВАНИЯ ЗАПАСНОЙ ШИНЫ | 2016 |
|
RU2700668C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2016 |
|
RU2719106C1 |
| СИСТЕМА И СПОСОБ (ВАРИАНТЫ) ПАРАЛЛЕЛЬНОЙ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702871C2 |
| СПОСОБ ПОСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА НА СТОЯНКУ И СИСТЕМА ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2014 |
|
RU2638587C2 |
| УСТРОЙСТВО И СПОСОБ ВЫБОРА РЕЖИМА ПАРКОВКИ | 2011 |
|
RU2523861C1 |
| СПОСОБ ОЦЕНКИ УЧАСТКА ДЛЯ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670845C9 |
| ВЫЯВЛЕНИЕ СВЕСА ПОЛУПРИЦЕПА ДЛЯ АКТИВНОГО СОДЕЙСТВИЯ ПАРКОВКЕ | 2018 |
|
RU2695749C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ ПОМОЩИ ПАРКОВКИ ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2741680C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |


Группа изобретений относится к системе содействия парковке транспортного средства и способу парковки. Система, осуществляющая способ парковки, содержит датчик парковки и контроллер. Контроллер запрограммирован направлять транспортное средство на место парковки на основании угловой скорости рыскания, скорости транспортного средства по GPS, скорости вращения колеса и исходного радиуса шины, так чтобы изменения радиуса шины от исходного радиуса шины во время предыдущего ездового цикла не были причиной большего расстояния между парковочным местом транспортного средства и бордюрным камнем, чем заданное пороговое расстояние. Обеспечивается помощь в парковке к идентифицированному месту парковки, избегая препятствий. 2 н. и 10 з.п. ф-лы, 3 ил.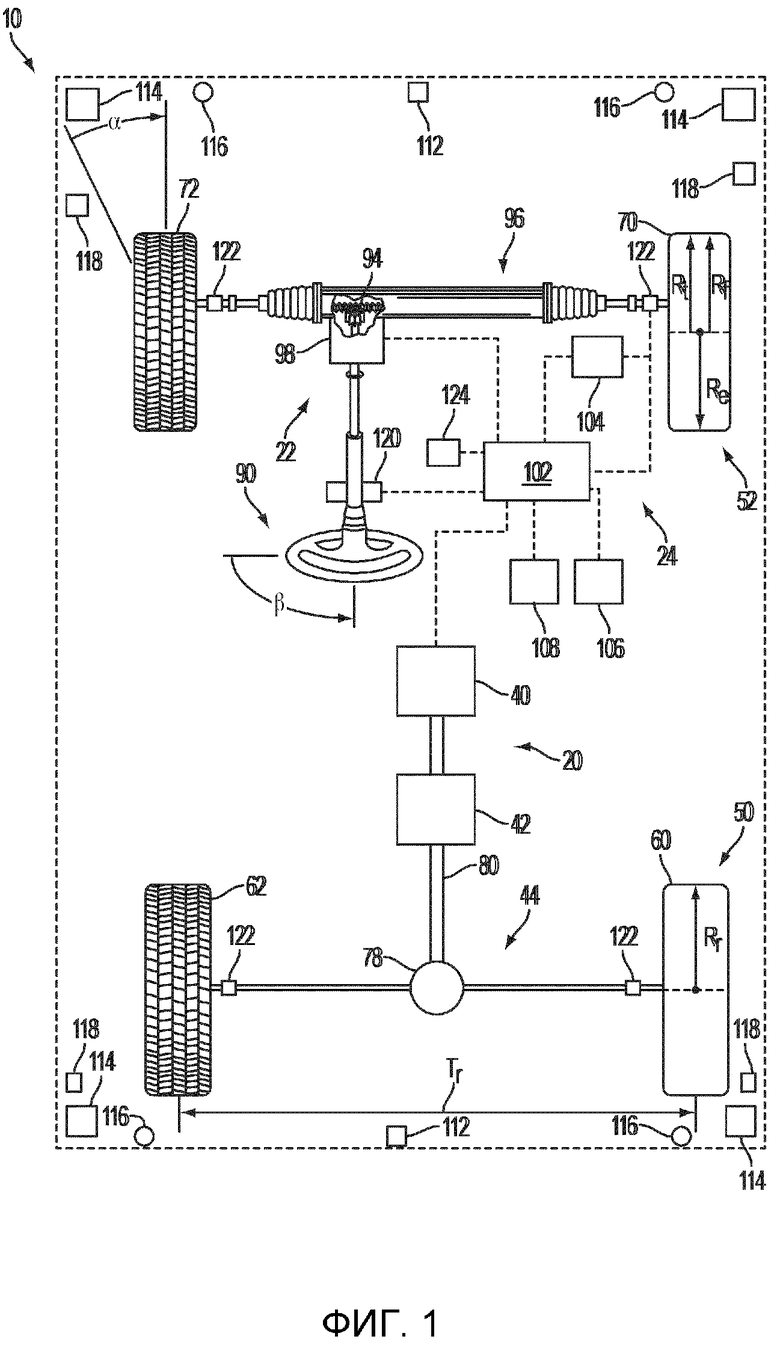
1. Система содействия парковке транспортного средства, содержащая:
датчик парковки, выполненный с возможностью идентифицировать место парковки для транспортного средства относительно бордюрного камня; и
контроллер, запрограммированный направлять транспортное средство на место парковки в ответ на запрос содействия парковке на основании угловой скорости рыскания, скорости транспортного средства по GPS, скорости вращения колеса и исходного радиуса шины, так чтобы изменения радиуса шины от исходного радиуса шины во время предыдущего ездового цикла не были причиной большего расстояния между парковочным местом транспортного средства и бордюрным камнем, чем заданное пороговое расстояние.
2. Система содействия парковке транспортного средства по п. 1, в которой исходный радиус шины связан с эталонной шиной, расположенной ближе к заднему мосту транспортного средства.
3. Система содействия парковке транспортного средства по п. 2, в которой изменения радиуса шины от исходного радиуса шины основаны на исходном радиусе шины, первой оценке радиуса шины и второй оценке радиуса шины, при этом первая оценка радиуса шины и вторая оценка радиуса шины являются оценками радиуса шины, отстоящей вбок от эталонной шины.
4. Система содействия парковке транспортного средства по п. 3, в которой исходный радиус шины основан на угловой скорости эталонной шины, ширине колеи транспортного средства и угловой скорости рыскания.
5. Система содействия парковке транспортного средства по п. 4, в которой первая оценка радиуса шины основана на исходном радиусе шины, угловой скорости шины, отстоящей вбок от эталонной шины, и ширине колеи транспортного средства.
6. Система содействия парковке транспортного средства по п. 4, в которой вторая оценка радиуса шины основана на скорости вращения колеса, скорости транспортного средства по GPS и эффективном крутящем моменте на колесе.
7. Способ парковки, включающий:
направление, посредством контроллера, транспортного средства в парковочное положение относительно бордюрного камня для завершения ездового цикла на основании угловой скорости рыскания, скорости транспортного средства по GPS, скорости вращения колеса, ширины колеи и радиуса стандартной шины так, чтобы изменения радиуса шины от радиуса стандартной шины во время ездового цикла не были причиной большего расстояния между парковочным положением и бордюрным камнем, чем заданное пороговое расстояние.
8. Способ парковки по п. 7, в котором радиус стандартной шины связан с эталонной шиной, расположенной ближе к заднему мосту транспортного средства.
9. Способ парковки по п. 8, в котором изменения радиуса шины от радиуса стандартной шины основаны на радиусе стандартной шины, первой оценке радиуса шины и второй оценке радиуса шины, при этом первая оценка радиуса шины и вторая оценка радиуса шины являются оценками радиуса шины, отстоящей вбок от эталонной шины.
10. Способ парковки по п. 8, в котором радиус стандартной шины основан на угловой скорости эталонной шины, ширине колеи и угловой скорости рыскания.
11. Способ парковки по п. 9, в которой первая оценка радиуса шины основана на радиусе стандартной шины, угловой скорости шины, отстоящей вбок от эталонной шины, и ширине колеи.
12. Способ парковки по п. 9, в котором вторая оценка радиуса шины основана на скорости вращения колеса, скорости транспортного средства по GPS и эффективном крутящем моменте на колесе.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| KR 100867699 B1, 10.11.2008 | |||
| JP 3395725 B2, 14.04.2003. | |||

