Изобретение относится к области измерительной техники и предназначено для определения скорости движения транспортного средства с одновременной его идентификацией, осуществляемой с использованием радиоволн.
Известен акустический способ определения скорости движения автомобиля в условиях плохой видимости, заключающийся в приеме электроакустическим преобразователем тональной составляющей звука, производимой автомобилем, по частоте которой определяют скорость движения автомобиля, при этом тональную составляющую звука f0, Гц, выделяют из спектра шумоизлучения автомобиля, для чего непрерывно измеряют изменения доплеровской частоты f(t), Гц, во времени t с данной тональной составляющей f0 и на временах, на которых наблюдается постоянство доплеровской частоты f(t) во времени t, определяют значение скорости V (м/с) движения автомобиля по математической зависимости V=(f(t)-f0)·С/f0, где С, м/с - известная скорость звука или скорость звука, определенная экспериментально, непосредственно в период определения скорости автомобиля, причем в момент времени t0, когда f(t)=f0, определяют траверзное расстояние d0 между автомобилем и электроакустическим преобразователем исходя из математической зависимости (патент RU №2290660, МПК G01S 11/14, 10.08.2006).
Известный способ может применяться в условиях плохой видимости, но не является в достаточной степени надежным и не позволяет произвести идентификацию транспортного средства, вследствие чего не получил распространения.
Известен способ, реализованный в системе контроля движения транспортных средств, заключающийся в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках дороги с помощью двух или более датчиков, чувствительных к изменению давления, установленных в этих точках дороги, измерении времени перемещения транспортного средства между этими точками траектории транспортного средства и последующем вычислении скорости движения транспортного средства, а также идентификации транспортного средства с помощью датчика идентификации, установленного на автомобиле, и приемопередатчика, установленного в непосредственной близости от дороги, который начинает и прекращает работать при пересечении автомобилем первого по ходу его движения и второго датчиков давления соответственно (патент RU №75768 U1, МПК G08G 1/00, 20.08.2008).
Недостатки известного способа обусловлены инерционностью датчиков давления, что требует разнесения мест установки датчиков на расстояние более чем 100 метров при высоких скоростях движения транспортных средств. Последнее снижает надежность идентификации, так как на таком значительном интервале дороги, в том числе скоростной трассы, вполне могут оказаться несколько автомобилей. Более того, увеличение интервала установки датчиков давления снижает надежность и точность измерения скорости, так как, попав в зону измерения и идентификации, водитель транспортного средства может снизить скорость, что на интервале 100 м вполне возможно, и результирующая скорость измерения окажется неверной.
Прототипом является способ определения скорости движения транспортного средства, заключающийся в последовательном обнаружении транспортного средства в двух заранее заданных, разнесенных в пространстве точках предполагаемой траектории его движения с помощью двух или более датчиков обнаружения, установленных в этих точках обнаружения, измерении времени перемещения транспортного средства между этими точками обнаружения, последующем вычислении скорости движения транспортного средства и его идентификации с помощью, по меньшей мере, одного узла идентификации, установленного на автомобиле, при этом обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют дистанционно по наличию ответных радиосигналов узлов идентификации, а в процессе обнаружения идентифицируют пары ответных радиосигналов от каждого из узлов идентификации, при этом так, что обнаружение транспортного средства в заданных точках предполагаемой траектории осуществляют одновременно с его идентификацией по ответным радиосигналам узла идентификации, для чего формируют радиосигналы опроса узлов идентификации по заранее определенному графику независимо от наличия транспортного средства между точками обнаружения (патент RU №2395815 C1, МПК G01P 3/66, 27.07.2010).
В прототипе транспортное средство, двигаясь по дороге, попадает в поле зрения сначала одного датчика обнаружения, потом другого, которые обеспечивают его обнаружение.
Время обнаружения каждым датчиком пары фиксируют и затем определяют скорость как отношение расстояния между датчиками обнаружения ко времени, затраченному транспортным средством на перемещение между ними.
Так как модуляция ответного сигнала узлов идентификации несет информацию о самом транспортном средстве, то помимо измерения скорости демодуляция ответного сигнала и в необходимых случаях его декодирование обеспечивает идентификацию самого транспортного средства. В качестве узлов идентификации используют пассивные или активные радиометки RFID.
Недостатком прототипа являются его ограниченные эксплуатационные возможности, так как для определения скорости транспортного средства используются два датчика обнаружения, при отказе одного из которых скорость не будет определена. Кроме того, попав в зону измерения и идентификации, водитель транспортного средства может снизить скорость и результирующая скорость измерения окажется неверной.
Использование двух датчиков обнаружения удорожает процесс измерения, делает невозможным изготовление носимого устройства.
Задачей изобретения является расширение области его применения за счет обеспечения возможности измерения скорости транспортных средств одновременно с их идентификацией при помощи одного устройства.
Технический результат достигается тем, что в способе определения скорости движения транспортного средства, заключающемся в обнаружении транспортного средства устройством определения скорости движения транспортного средства, дистанционно, по наличию ответных радиосигналов, по меньшей мере, одного узла идентификации, установленного на транспортном средстве, последующей идентификации транспортного средства с помощью, по меньшей мере, одного ответного радиосигнала узла идентификации, согласно заявленному изобретению ответные радиосигналы, по меньшей мере, одного узла идентификации используют и для определения скорости движения транспортного средства по времени прихода ответного радиосигнала, по меньшей мере, одного узла идентификации, относительно времени передачи падающего электромагнитного сигнала, формируемого устройством определения скорости движения транспортного средства.
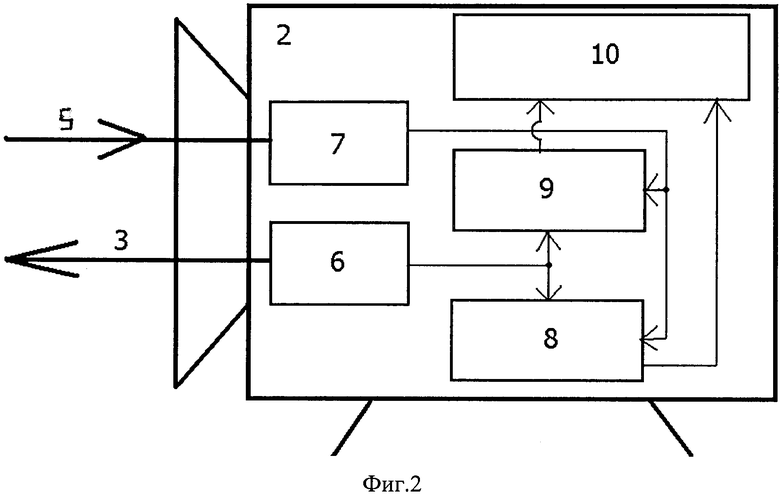
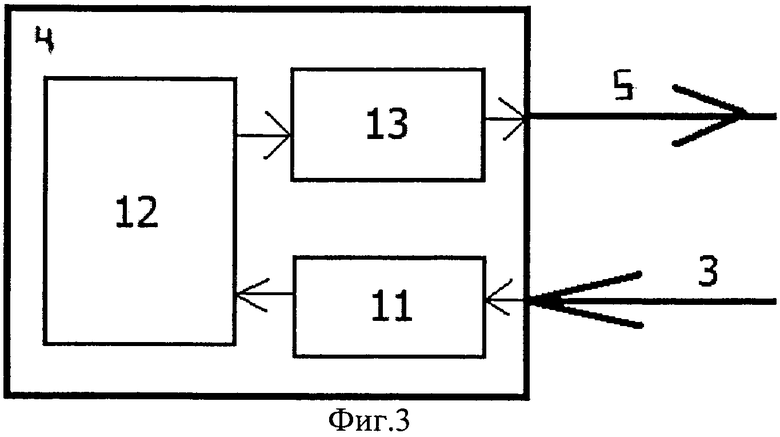
Способ измерения скорости движения транспортного средства поясняется с помощью чертежей, где на фиг.1 показан принцип определения скорости движения транспортного средства заявленным способом, на фиг.2 показан пример структурной схемы устройства определения скорости движения транспортного средства, реализующего заявленный способ, на фиг.3 показан пример структурной схемы узла идентификации, установленного на транспортном средстве.
На чертежах сделаны следующие обозначения:
1 - транспортное средство (например, легковой автомобиль), движущееся по дороге со скоростью V;
2 - устройство определения скорости движения транспортного средства 1;
3 - падающий электромагнитный сигнал от устройства 2 определения скорости движения транспортного средства;
4 - узел идентификации, установленный на транспортном средстве 1;
5 - ответный радиосигнал узла 4 идентификации (пассивная или активная радиометка RFID, от которой идет основной ответный радиосигнал к устройству 2 определения скорости движения транспортного средства);
6 - передатчик, формирующий падающий электромагнитный сигнал 3;
7 - приемник, который принимает ответный радиосигнал 5;
8 - блок определения скорости V движения транспортного средства 1;
9 - блок идентификации (определения номера) транспортного средства 1 по принятому кодированному ответному радиосигналу 5 от узла 4 идентификации;
10 - блок управления и сигнализации;
11 - приемник узла 4 идентификации, который принимает падающий электромагнитный сигнал 3;
12 - кодирующее устройство узла 4 идентификации, который кодирует данные по транспортному средству 1 в ответный радиосигнал 5;
13 - передатчик узла 4 идентификации, который формирует ответный радиосигнал 5.
Способ определения скорости V движения транспортного средства 1 заключается в обнаружении транспортного средства устройством 2 определения скорости V движения транспортного средства, дистанционно, по наличию ответных радиосигналов 5, по меньшей мере, одного узла 4 идентификации, установленного на транспортном средстве 1, последующей идентификации транспортного средства 1 с помощью, по меньшей мере, одного ответного радиосигнала 5 узла 4 идентификации.
Отличием заявленного способа является то, что ответные радиосигналы 5, по меньшей мере, одного узла 4 идентификации используют и для определения скорости V движения транспортного средства 1 по времени прихода ответного радиосигнала 5, по меньшей мере, одного узла 4 идентификации, относительно времени передачи падающего электромагнитного сигнала 3, формируемого устройством 2 определения скорости движения транспортного средства 1.
Заявленный способ реализуется следующим образом.
Для реализации заявленного способа транспортное средство 1 (фиг.1), движущееся со скоростью V, оборудовано узлом 4 идентификации.
Устройство 2 определения скорости V движения транспортного средства 1 своим передатчиком 6 (фиг.2) формирует падающий электромагнитный сигнал 3, который принимается приемником 11 (фиг.3) узла 4 идентификации. На основе принятого падающего электромагнитного сигнала 3 кодирующее устройство 12 узла 4 идентификации формирует ответный сигнал, который содержит закодированные данные о транспортном средстве 1 (номер автомобиля и т.д.). Передатчик 13 узла 4 идентификации из сигнала кодирующего устройства 12 формирует ответный радиосигнал 4, который принимает приемник 7 устройства 2 определения скорости движения транспортного средства 1. Сравнивая сигналы передатчика 6 и приемника 7, блок 8 определяет скорость V транспортного средства 1. Блок 9 идентифицирует (определяет номер) транспортного средства 1, декодируя принятый ответный радиосигнал 4. Блок 10 управляет устройством 2, отображает полученные данные о скорости и номере транспортного средства 1, передает полученные данные на центральный сервер (на чертеже условно не показан).
Блок 8 определяет скорость V транспортного средства 1 импульсным способом по разности времени to передачи падающего электромагнитного сигнала 3 и приема времени t1 ответного радиосигнала 5:
L=C·(t1-to-dt)/2,
где L - дальность до транспортного средства в момент времени to.
В данном способе кодирующее устройство 12 узла 4 идентификации формирует ответный радиосигнал 5 с фиксированной задержкой dt относительно принятого падающего электромагнитного сигнала 3. Проведя последовательно два измерения дальности Lo и L2 в моменты времени to и t2 блок 8 определяет скорость V транспортного средства 1:
V=(Lo-L2)/(t2-to).
Таким образом, заявленный способ имеет более широкую область применения за счет обеспечения возможности измерения скорости транспортных средств одновременно с их идентификацией при помощи одного устройства.
Изобретение предназначено для определения скорости движения транспортного средства с одновременной его идентификацией, осуществляемой с использованием радиоволн. Достигаемый технический результат - расширение области применения за счет обеспечения возможности измерения скорости транспортных средств одновременно с их идентификацией при помощи одного устройства. Технический результат достигается тем, что в способе определения скорости движения транспортного средства, заключающемся в обнаружении транспортного средства устройством определения скорости движения транспортного средства, дистанционно, по наличию ответных радиосигналов, по меньшей мере, одного узла идентификации, установленного на транспортном средстве, последующей идентификации транспортного средства с помощью, по меньшей мере, одного ответного радиосигнала узла идентификации, согласно заявленному изобретению ответные радиосигналы, по меньшей мере, одного узла идентификации используют, в том числе, для определения скорости движения транспортного средства по времени прихода ответного радиосигнала, по меньшей мере, одного узла идентификации, относительно времени передачи падающего электромагнитного сигнала, формируемого устройством определения скорости движения транспортного средства. 3 ил.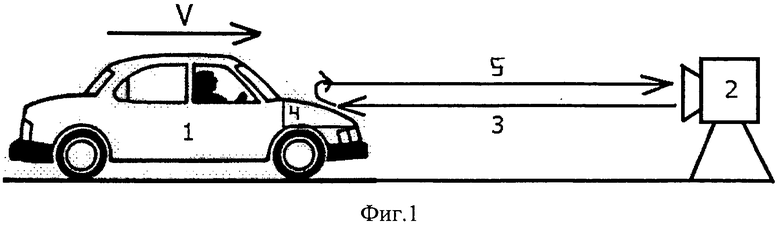
Способ определения скорости движения транспортного средства, заключающийся в обнаружении транспортного средства устройством определения скорости движения транспортного средства, дистанционно, по наличию ответных радиосигналов, по меньшей мере, одного узла идентификации, установленного на транспортном средстве, при этом ответные сигналы в узле идентификации формируются кодирующим устройством, последующей идентификации транспортного средства с помощью, по меньшей мере, одного ответного радиосигнала узла идентификации, отличающийся тем, что ответные радиосигналы, по меньшей мере, одного узла идентификации используют и для определения скорости транспортного средства по времени прихода ответного радиосигнала, по меньшей мере, одного узла идентификации, относительно времени передачи падающего электромагнитного сигнала, формируемого устройством определения скорости движения транспортного средства, при этом кодирующее устройство узла идентификации формирует ответный радиосигнал с фиксированной задержкой относительно принятого падающего электромагнитного сигнала.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2395815C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| WO 2011014093 A1, 03.02.2011 | |||
| US 6266627 B1, 24.07.2001 | |||
| Поршень для двигателя внутреннего сгорания | 1990 |
|
SU1744292A1 |
| WO 2007027074 A1, 08.03.2007 | |||

