Изобретение относится к системам регулирования движения транспортных средств (ТС), а точнее к способам и устройствам контроля за соблюдением правил дорожного движения (ПДД), в том числе за соблюдением скоростного режима.
Для контроля за соблюдением скоростного режима ТС, двигающихся в потоке и автоматической регистрации нарушений, необходимо произвести измерение скорости и координат транспортного средства и, в случае нарушения им скоростного режима, идентифицировать его с требуемой, достаточно высокой степенью вероятности. Измерение скорости, как правило, производится радиолокационными устройствами (радарами), принцип измерения скорости которых основан на эффекте Доплера, либо лазерными устройствами (лидарами), у которых принцип измерения скорости основан на оценке интервалов времени между излученными и принятыми (отраженными от ТС) импульсами, с последующим вычислением скорости. Данные устройства обеспечивают метрологически достоверные данные о скоростях ТС. Координаты ТС при контроле скоростного режима движения ТС не определяются, а как правило задаются, т.е. радар или лидар измеряет скорость ТС в заранее определенной зоне контроля, которая имеет размеры, сопоставимые с размерами ТС. Идентификация ТС производится, в большинстве известных случаев, по государственному регистрационному знакам (ГРЗ), считываемому видеокамерой в той же зоне контроля и распознаваемому с помощью специального программного обеспечения, устанавливаемого в устройство контроля (см., например, опубликована межд. заявка WО 9946613 МПК6, G01S 13/00, G08G 1/052, 1/054, опубл. 16.09.1999; CN 1707545 МПК7 G08G 1/052, 1/054, опубл. 14.12.2005).
Известны способы и устройства для определения скорости и координат с использованием видеокамер и сенсорных систем, встроенных в дорожное полотно, где видеокамеры используются для регистрации нарушающего ТС (см., например, пат. ЕР 1513125, МПК7 G08G 1/017, 1/04, 1/054, опубл. 09.03.2005; опубликованная межд. заявка WO 2005/062275, МПК7 G08G 1/01, 1/052, 1/054, опубл. 07.07.2005). Недостатками данных систем контроля за соблюдением скоростного режима ТС являются специфические требования по климатическим условиям применения (отсутствие снежного покрова и отрицательных температур), а также то, что они регистрируют (замечают) нарушение скоростного режима только на участке дороги между сенсорами, который при этом стремятся уменьшить до размеров расстояния между осями автомобиля, с целью повышения точности измерения скорости нарушающего ТС.
Известен способ определения скорости, где видеокамерой панорамного обзора непрерывно снимают выделенный участок дорожного полотна (см., например, ЕР 1744292, МПК7 G08G 1/04, 1/052, 1/054, G06T 7/00, опубл. 10.07.2006). Скорость ТС вычисляют по расстоянию между двумя определенными положениями ТС, зафиксированными на двух кадрах, снимаемых данной видеокамерой, и по интервалу времени между этими кадрами. При этом видеокамера калибруется по четырем вершинам прямоугольника, которые реально размечены на дорожном полотне на известных расстояниях. Выявленное ТС-нарушитель регистрируется другой камерой - камерой, позволяющей получить видеокадр с более высоким разрешением. Недостатком способа и устройства для его реализации по данному патенту является то, что из теоретических оценок, а также по ГОСТу Р 50856-96 видеокамера не является средством, которое предназначено для получения метрологически достоверных данных о скорости ТС, поскольку позволяет вычислять скорость ТС с ошибкой, которая зависит от точности юстировки, калибровки видеокамеры и размеров движущегося ТС.
Известен способ определения ТС, движущихся с превышением скорости (пат. США US 6696978, МПК7 G08G 1/01, 1/052, 1/054, опубл. 24.02.2004), заключающийся в том, что радиолокатором или лазерным локатором (лидаром) излучают э/м импульсы в направлении выбранного ТС, принимают отраженные импульсы, определяют скорость ТС известным способом и формируют сигнал для активизации видеокамеры для формирования кадра с регистрационным номером ТС при обнаружении превышения скоростного режима с выводом в указанный кадр: измеренной скорости, распознанного регистрационного номера и других данных идентификации ТС. Полученные данные передаются в оперативный центр контроля для принятия соответствующих мер по совершенным правонарушениям. Недостатком данного способа является то, что в данном техническом решении в зону обзора радиолокатора должно попадать только одно ТС. Это означает, что количество радиолокаторов и видеокамер должно соответствовать числу полос движения, что резко повышает стоимость оборудования и затраты на его эксплуатацию. Кроме того, поскольку вероятность одновременного попадания в зону приема радиолокатором отраженных от нескольких ТС сигналов достаточно велика, это повышает вероятность ошибки идентификации ТС-нарушителя, что является неприемлемым для случаев, когда ТС двигаются в плотном потоке по нескольким полосам движения. Так, например, в патенте GB 1211834, МПК G01S 13/92, G08G 1/052, G08G 1/054) запрещена фиксация (фотографирование) ТС видеокамерой для регистрации, если в зоне облучения радиолокатора находится еще одно ТС.
Наиболее близким к предлагаемому способу по технической сущности является способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений дорожного движения по пат. США US 6266627, МПК7 G08G 1/00, 1/052, 1/054, G01S 13/00, опубл. 24.07.2001. Данный способ заключается в том, что в направлении движущихся по участку дорожного полотна ТС излучают импульсы э/м излучения, принимают импульсы отраженного э/м излучения, вычисляют дальность и скорость движения транспортных средств путем сравнения параметров излученных и принятых импульсов и сравнивают измеренную скорость ТС с максимально разрешенной на данном участке с последующим формированием, в случае регистрации превышения скорости, сигнала для фиксации регистрационного номера нарушающего ТС с помощью видеокамеры с последующей идентификацией ТС и автоматической регистрацией нарушений скоростного режима. При этом определяют полосу движения ТС-нарушителя по вычисленной дальности.
Данный способ также имеет вышеуказанный недостаток - большую вероятность ложного определения ТС-нарушителя при фактическом отсутствии нарушения, что можно пояснить следующим образом. Для пояснения рассмотрим реальную ситуацию, показанную на фиг.1 в описании данного патента. На представленной в патенте фиг.1 луч радиолокатора показан расходящимся под углом 4-5°, что является идеализацией, используемой в теоретических расчетах, и соответствует мощности излучения по уровню -3 дБ основного лепестка диаграммы направленности радиолокатора. Реальная диаграмма направленности антенны радиолокатора с учетом мощности основного лепестка по уровню от -3 дБ до ориентировочно -20 дБ значительно шире и всегда содержит боковые лепестки, что показано на фиг.1 дополнительных материалов, касающихся патента-прототипа, и выделено розовым цветом со штриховкой. Как видно из фиг.1, в зоне раскрыва диаграммы антенны (как в основном, так и в боковых лепестках) присутствуют сигналы, отраженные от ТС. Все ТС, попавшие на дугу радиусом R (показано на фиг.1 в виде заштрихованного сектора зеленого цвета) находятся на одной дальности от радиолокатора и, следовательно, импульсы, отраженные от этих ТС, придут на радиолокатор в одно время. Из фиг.1 видно, что, по крайней мере, три автотранспортных средства, движущихся по совершенно разным полосам движения находятся на одной дальности, и отраженные от них сигналы придут в одно время, но с различной мощностью. Мощность принимаемых сигналов Рr, определяемая формулой
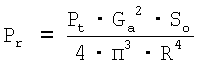
где Pr - мощность принимаемых сигналов, Pt - мощность излучаемых сигналов, Ga2 - квадрат коэффициента усиления антенны радиолокатора, So - эффективная отражающая поверхность цели, R4 - четвертая степень расстояния объекта от радиолокатора, является функцией нескольких изменяющихся параметров. Таким образом, возможно, что мощность принятых сигналов Рr, отраженных от ТС с малой So (малые габариты ТС) при большой мощности Pt (основной лепесток диаграммы направленности радиолокатора) может быть соизмерима с мощностью Рr принятых сигналов, отраженных от ТС с большой So (большие габариты ТС) при малой мощности Pt (боковые лепестки диаграммы направленности радиолокатора), движущегося по другой полосе движения и не совершающего нарушение скоростного режима, что может привести к ошибке в определении ТС-нарушителя.
Приведем в качестве примера ссылку из весьма авторитетного источника (Справочник по радиолокации, п/редакцией М. Сколника, т.1, Глава 9, стр.356): «…любое численное значение ЭПР (So в вышеуказанной формуле) справедливо только для конкретных целей, комбинации поляризаций, пространственного положения и частоты, для которой это значение и было определено. В большинстве случаев, представляющих практический интерес, ЭПР цели может меняться в широких пределах: на 20-30 дБ и более при сравнительно небольшом изменении любого из этих параметров».
Таким образом, вполне очевидна ситуация, когда радиолокатор принимает отраженные сигналы как от ТС, двигающегося по контролируемой полосе движения и отчетливо видимого видеокамерой, так и от ТС, двигающегося по соседней полосе движения. Допустив, что расстояния сопоставимы, площадь ТС, движущегося параллельно контролируемому ТС, в несколько раз больше, а скорость превышает разрешенную, получим ситуацию, при которой устройство выдаст сигнал о превышении скорости ТС, находящимся в зоне контроля. Если вероятность данных событий велика (насыщенный трафик движения), то количество ошибочно зафиксированных нарушений будет чрезвычайно велико, что резко снизит эксплуатационные характеристики способа-прототипа.
Исходя из вышеприведенного анализа, можно утверждать, что способ-прототип обладает существенным недостатком, а именно большой вероятностью ошибки идентификации ТС-нарушителя, что делает способ-прототип неприемлемым для использования на дорожном полотне с большим количеством полос движения при плотном транспортном потоке.
Наиболее близким к предлагаемому устройству по технической сущности является устройство для определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений дорожного движения по пат. США US 6266627, МПК7 G08G 1/00, 1/052, 1/054, G01S 13/00, опубл. 24.07.2001. Устройство содержит радиолокатор, видеокамеру для записи и распознавания ГРЗ и блок обработки и управления данных, соединенный с ними и включающий в себя соединенное с упомянутой видеокамерой средство для выработки сигнала - метки для случая, когда зарегистрировано нарушение скоростного режима.
Недостатком данного устройства, реализующего вышеописанный способ также, как и в предыдущих аналогах, является большая вероятность ошибки идентификации ТС-нарушителя, что делает невозможным его использование на дорожном полотне с большим количеством полос движения и/или при плотном транспортном потоке. Кроме того, недостатком устройства-прототипа является небольшая протяженность зоны контроля - не более 20-30 метров.
Задачами, на решение которых направлено предлагаемое изобретение, являются:
- разработка способа определения скорости движения и координат транспортных средств и устройства для его осуществления, обеспечивающих снижение вероятности ошибки идентификации ТС-нарушителя в системах автоматической регистрации нарушений скоростного режима движения ТС,
- увеличение протяженности зоны контроля скоростного режима движения с одного - двух десятков метров до нескольких сотен - тысячи метров,
- использование одного, а не нескольких устройств для контроля участков дороги с многополосным движением.
Решение данной задачи позволит резко снизить затраты на строительство и обслуживание эстакад для установки устройств контроля скоростного режима.
Поставленные задачи в части способа достигаются за счет того, что в разработанном способе, как и в способе-прототипе излучают в направлении движущихся по участку дорожного полотна транспортных средств импульсы э/м излучения, принимают импульсы отраженного э/м излучения, вычисляют дальности и скорости движения, по крайней мере, одного транспортного средства путем сравнения параметров излученных и принятых импульсов и сравнивают измеренную скорость транспортного средства с максимально разрешенной на данном участке, с последующим формированием в случае регистрации превышения скорости, сигнала для распознавания ГРЗ нарушающего транспортного средства с помощью видеокамеры с последующей идентификацией транспортного средства и автоматической регистрацией нарушений правил дорожного движения (ПДД).
Новым, в разработанном способе, является то, что упомянутые импульсы излучают радиолокатором синхронно с видеосъемкой того же участка дорожного полотна видеокамерой панорамного обзора, которая откалибрована так, что каждому элементу строки Yi и каждому элементу столбца Xi матрицы видеокамеры ставят в соответствие реальные координаты расстояний от упомянутой видеокамеры до соответствующих участков на дорожном полотне. При этом по принятым радиолокатором сигналам вычисляют дальность и скорость не одного, а всех транспортных средств, находящихся в текущий момент на выбранном участке дорожного полотна протяженностью несколько сотен метров, и, независимо и синхронно, по полученному посредством упомянутой видеокамеры изображению транспортных средств вычисляют координаты и скорости тех же транспортных средств, находящихся в кадре. После чего сравнивают упомянутые, получаемые независимо друг от друга посредством радиолокатора и видеокамеры потоки данных, содержащие значения скоростей и координат всех транспортных средств, находящихся в текущий момент на выбранном участке дорожного полотна. При этом для получения метрологически достоверных значений скоростей и координат транспортных средств, используют данные радиолокатора. Каждому ТС, нарушающему ПДД, обеспечивают дальнейшее сопровождение до момента распознавания ГРЗ, затем формируют кадр изображения ТС-нарушителя с отчетливо видимым ГРЗ, распознанным ГРЗ, датой, временем и зафиксированной скоростью и/или координатой, что позволяет осуществлять автоматическую регистрацию нарушений ПДД.
В первом частном случае реализации разработанного способа целесообразно сравнение упомянутых, получаемых независимо друг от друга посредством радиолокатора и видеокамеры, потоков данных, содержащих значения скоростей и координат всех транспортных средств, находящихся в текущий момент на выбранном участке дорожного полотна осуществлять, например, корреляционным методом.
Поставленные задачи в части устройства достигаются за счет того, что разработанное устройство, как и устройство-прототип содержит радиолокатор, видеокамеру для записи и распознавания ГРЗ транспортных средств, нарушающих ПДД, и блок управления и обработки данных, соединенный с ними.
Новым в разработанном устройстве является то, что в качестве радиолокатора используется радиолокатор, содержащий модуль обработки сигналов, осуществляющий вычисление скорости и дальности всех ТС, находящихся на выбранном участке дорожного полотна, при этом в устройство введена видеокамера панорамного обзора, обеспечивающая съемку участка дороги от 40-50 метров до нескольких сотен метров, которая соединена с блоком управления и обработки данных, который снабжен программным обеспечением для синхронизации работы радиолокатора и видеокамеры панорамного обзора, сравнения принимаемых от них потоков данных, получения метрологически достоверных результатов измерения скоростей и координат ТС, нарушивших скоростной режим движения, и передачи данных для автоматической регистрации нарушений правил дорожного движения.
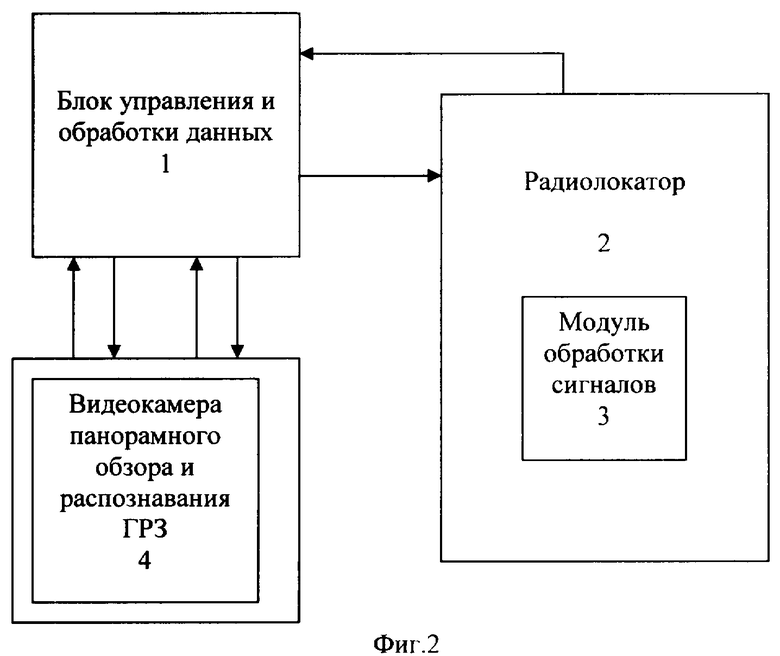
В первом частном случае реализации устройства целесообразно функции видеокамеры для панорамного обзора и функции видеокамеры для распознавания ГРЗ выполнять одной широкоугольной «мегапиксельной» видеокамерой.
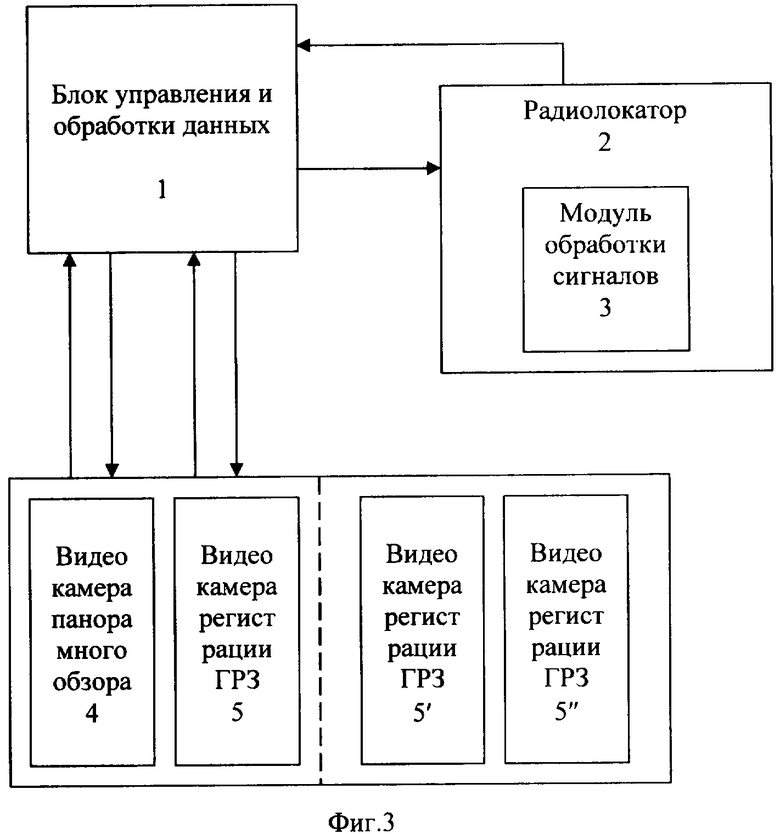
Во втором частном случае реализации устройства целесообразно в качестве видеокамеры для записи и распознавания ГРЗ использовать несколько «обычных» видеокамер, в соответствии с количеством полос движения.
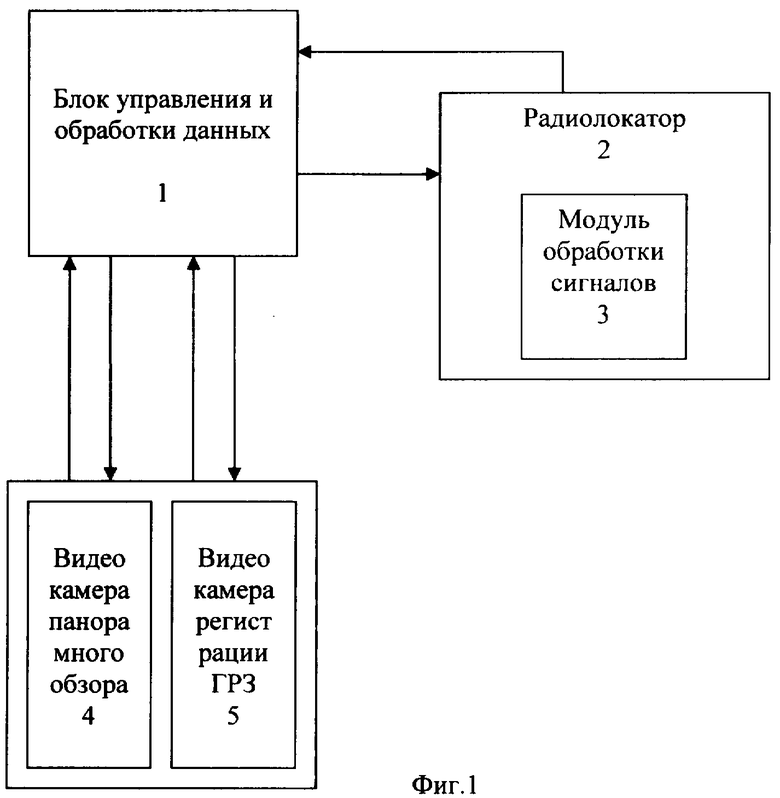
На Фиг.1 представлена блок-схема разработанного устройства по п.3 формулы.
На Фиг.2 представлена блок-схема разработанного устройства по п.4 формулы.
На Фиг.3 представлена блок-схема разработанного устройства по п.5 формулы с использованием нескольких видеокамер для распознавания ГРЗ в соответствии в количеством полос движения.
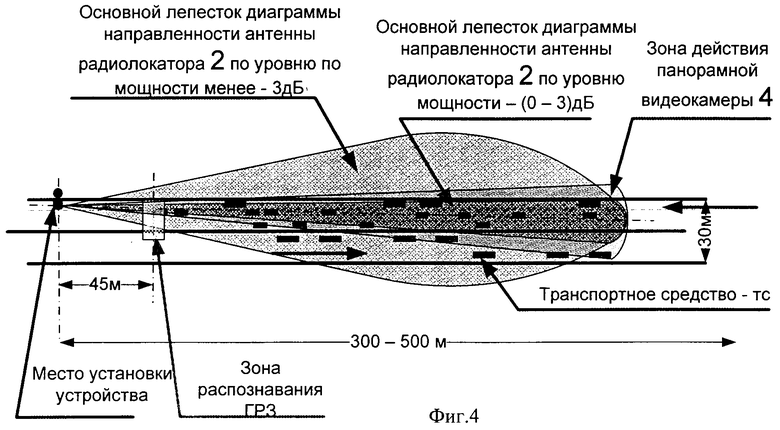
На Фиг.4 представлена схема, поясняющая работу устройства на контролируемом участке дороги.
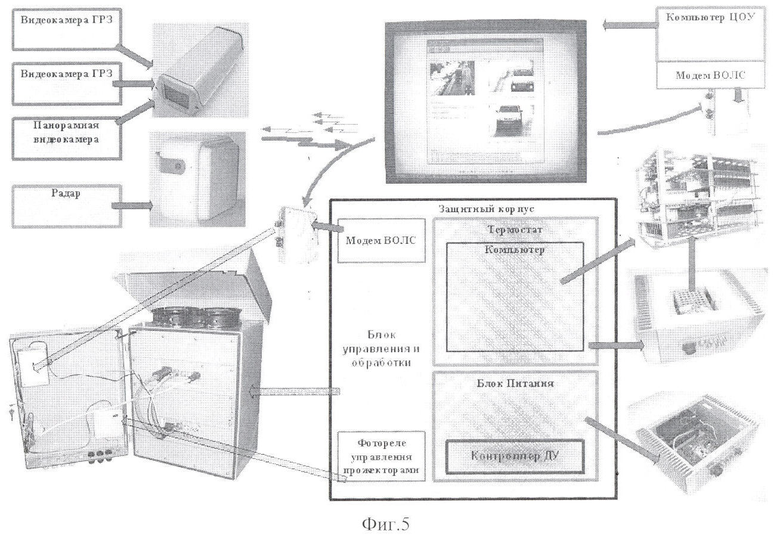
На Фиг.5 представлен внешний вид и структура блоков и узлов, входящих в состав разработанного устройства.
На Фиг.6 представлен пример конкретной реализации отображения результатов работы устройства на экране монитора в оперативном центре управления дорожным движением.
Устройство, представленное на Фиг.1, содержит блок 1 управления и обработки, радиолокатор 2 с модулем 3 обработки сигналов, видеокамеру панорамного обзора 4 и видеокамеру распознавания ГРЗ 5.
Блок 1 управления и обработки данных представляет собой компьютер с программным обеспечением, который осуществляет:
- управление работой радиолокатора 2 и видеокамер 4, 5,
- прием сигналов от видеокамер 4, 5,
- прием данных от модуля 3 обработки сигналов радиолокатора 2,
- формирование потоков данных координат и скоростей ТС, находящихся в кадре видеокамеры 4,
- сравнение потоков данных от модуля 3 радиолокатора 2 и видеокамеры 4,
- передачу данных на центральный пост (не представлен) управления дорожным движением для автоматической регистрации нарушений правил дорожного движения.
Конкретная реализация блока 1 управления и обработки выполнена на базе процессора «Интел Пентиум-М». Блок 1 обладает высокой производительностью, сравнительно низким энергопотреблением (~40 Вт), конструктивно защищен от механических воздействий оригинальной системой амортизации и предназначен для работы в диапазоне температур от -40 до +60°С (См. Фиг.5).
В качестве радиолокатора 2 используется радиолокатор, выполненный по классической моноимпульсной схеме с последующим цифровым накоплением и обработкой принятых импульсов. Несущая частота излучения 24,15 ГГц. Длительность импульса по уровню 0,5Ризл.=30 нс. Период повторения импульсов 25 мкс. Модуль 3 обработки сигналов радиолокатора 2 содержит процессор, позволяющий одновременно выделять, формировать и накапливать пачки из 256÷1024 импульсов для каждого элемента дальности, выполнять над ними быстрое преобразование Фурье и обнаруживать отраженные от ТС сигналы. Модуль 3 позволяет также проводить селекцию ТС по скоростям, начиная с нулевых.
В качестве видеокамеры панорамного обзора 4, в одном частном случае, используется широкоугольная «мегапиксельная» видеокамера, которая одновременно выполняет и функции видеокамеры распознавания ГРЗ 5, поскольку обладает возможностью высокого разрешения за счет большего (в 5-10 раз) числа элементов матрицы, по сравнению с обычной видеокамерой. Применение такого варианта целесообразно для участков дорог с большим числом полос движения (более двух).
В другом частном случае в качестве панорамной видеокамеры 4 используются одна широкоугольная видеокамера панорамного обзора 4 и несколько видеокамер 5 для распознавания ГРЗ в соответствии с количеством полос движения, что целесообразно для участков дорог с малым числом полос движения, поскольку обычные видеокамеры гораздо дешевле мегапиксельной.
Разработанный способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений дорожного движения в соответствии с п.1 формулы реализуют с помощью устройства, представленного на Фиг.1, следующим образом.
Перед началом работы устройства осуществляют его предварительную калибровку, при которой каждому элементу строки Yi и каждому элементу столбца Xi матрицы видеокамеры панорамного обзора 4 ставят в соответствие координаты расстояний от упомянутой видеокамеры 4 до соответствующих участков на дорожном полотне. Это необходимо для проведения независимой оценки скорости ТС с помощью видеокамеры 4.
Далее, как показано на Фиг.4, радиолокатором 2 излучают э/м импульсы в направлении движущихся ТС на выбранном участке дорожного полотна и принимают отраженные импульсы. Синхронно с излучением радиолокатора 2 проводят видеосъемку того же участка дорожного полотна видеокамерой 4. Зона действия основного лепестка антенны радиолокатора 2 конструктивно сопряжена с зоной обзора панорамной видеокамеры 4, как показано на Фиг.4. После чего, по принятым радиолокатором 2 сигналам, с помощью модуля 3 вычисляют дальность и скорость всех транспортных средств, находящихся в текущий момент на выбранном участке дорожного полотна, и независимо и синхронно по полученному посредством видеокамеры 4 изображению транспортных средств вычисляют, посредством блока 1 управления и обработки, координаты и скорости тех же транспортных средств. Затем с помощью блока 1 сравнивают, например, корреляционным методом в соответствии с п.2 формулы, упомянутые, получаемые независимо друг от друга потоки данных, содержащие скорости и координаты всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна. Метрологически достоверными данными о скоростях и координатах Yi транспортных средств принимаются данные, полученные от радиолокатора 2. За достоверные данные о координатах Xi, тех же транспортных средств, принимаются данные, полученные от видеокамеры 4. В случае превышения транспортными средствами установленного порога скорости на данном участке они определяются как ТС-нарушители скоростного режима, и каждому из них обеспечивают дальнейшее сопровождение блоком 1 управления и обработки до дальности, позволяющей произвести распознавание их ГРЗ видеокамерой 5. Затем блоком 1 производится автоматическое распознавание ГРЗ и формирование кадра изображения ТС-нарушителя с отчетливо видимым ГРЗ, результатом распознавания ГРЗ, датой, временем, идентификатором видеокамеры 5 и зафиксированной скоростью, что позволяет осуществить автоматическую регистрацию нарушений ПДД.
Таким образом, поскольку в разработанном способе используются метрологически достоверные данные о координатах и скоростях ТС, наблюдаемых по всем полосам дорожного полотна одновременно, то вероятность ошибки идентификации ТС автоматической системы регистрации нарушений ПДД снижена по сравнению с прототипом.
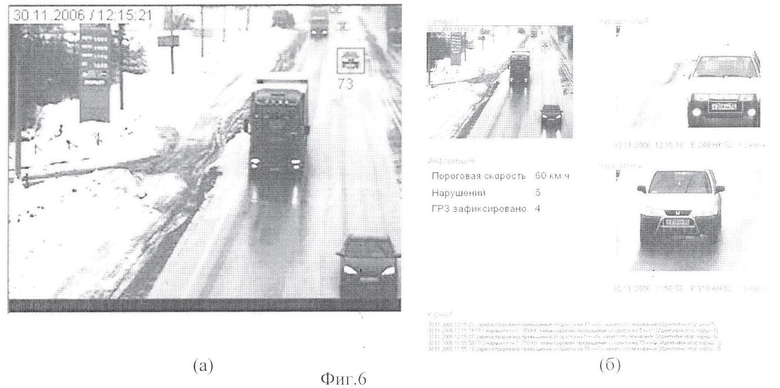
Пример конкретной реализации отображения результатов работы устройства на экране монитора в центре оперативного управления (ЦОУ) дорожным движением представлен на Фиг.6.
На Фиг.6(а) представлен кадр съемки панорамной видеокамеры, на котором показан нарушитель, обведенный рамкой и указана его фактическая скорость 73 км/ч. В левом верхнем углу кадра указаны дата и время совершенного правонарушения.
На Фиг.6(б) показан фрагмент журнала событий, хранящихся в базе данных с историей зафиксированных правонарушений. Задана пороговая скорость 60 км/ч. В журнал заносятся все ТС-нарушители, скорость которых превышает установленный порог, при этом фиксируется скорость, распознанный ГРЗ, дата и время нарушения.
В правом верхнем углу показано панорамное изображение контролируемого участка дороги с нарушителем, справа показаны кадры съемки автомобиля с распознанным ГРЗ.
Эти данные передаются в центр оперативного управления, где составляется протокол об административном правонарушении.
Таким образом, технический результат, обеспечиваемый предлагаемым способом и устройством для его реализации, заключающийся в:
- снижении вероятности ошибки идентификации ТС автоматической системой регистрации нарушений ПДД, который достигается за счет применения двух независимых способов определения скоростей и координат ТС с помощью видеокамеры и радиолокатора с последующим сравнением результатов измерений, что позволяет уменьшить общую вероятность ошибки идентификации,
- увеличении протяженности зоны контроля скоростного режима движения с одного, двух десятков метров до нескольких сотен метров,
- использовании одного, а не нескольких устройств для контроля участков дороги с многополосным движением,
обеспечивается, что позволяет решить поставленные задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА ТРАНСПОРТНОГО ПОТОКА | 2014 |
|
RU2559862C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОТОКОВ АВТОМОБИЛЬНОГО ТРАНСПОРТА С ЦЕЛЬЮ УЧЕТА И РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ | 2014 |
|
RU2573629C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2491647C2 |
Группа изобретений относится к технике регулирования движения транспортных средств, а точнее к способам и устройствам контроля за соблюдением правил дорожного движения, в том числе за соблюдением скоростного режима. Предложенный способ предусматривает совместную обработку сигналов от радиолокатора и видеокамеры панорамного обзора. Используются независимо полученные потоки данных от видеокамеры и радиолокатора, после чего они сравниваются и получаются данные о скоростях и координатах с малой вероятностью ошибки идентификации ТС-нарушителя. Устройство для осуществления предложенного способа содержит радиолокатор с модулем обработки сигналов, обеспечивающий вычисление скорости и дальности всех ТС, находящихся на выбранном участке дорожного полотна, и видеокамеру панорамного обзора. Группа изобретений обеспечивает снижение вероятности ошибки идентификации ТС-нарушителя, увеличивает протяженность зоны контроля скоростного режима движения до нескольких сотен - тысячи метров, позволяет снизить затраты на строительство и обслуживание эстакад для установки устройств контроля скоростного режима. 2 н. и 3 з.п. ф-лы, 6 ил.
1. Способ определения скорости движения и координат транспортных средств, включающий излучение в направлении движущихся по участку дорожного полотна транспортных средств (ТС) импульсов электромагнитного излучения, прием импульсов отраженного электромагнитного излучения, вычисление дальности и скорости движения ТС путем сравнения параметров излученных и принятых импульсов и сравнение измеренной скорости ТС с максимально разрешенной на данном участке с последующими формированием, в случае регистрации превышения скорости, сигнала для распознавания государственного регистрационного знака нарушающего ТС с помощью видеокамеры распознавания государственного регистрационного знака, идентификацией ТС и автоматической регистрацией нарушений скоростного режима, отличающийся тем, что импульсы излучают радиолокатором синхронно с видеосъемкой того же участка дорожного полотна видеокамерой панорамного обзора, которая откалибрована так, что каждому элементу строки Yi и каждому элементу столбца Xi матрицы видеокамеры поставлены в соответствие реальные координаты расстояний от видеокамеры панорамного обзора до соответствующих участков на дорожном полотне, при этом по принятым радиолокатором сигналам вычисляют дальности и скорости всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна протяженностью несколько сотен метров, и независимо и синхронно по полученному посредством видеокамеры панорамного обзора изображению ТС вычисляют координаты и скорости тех же транспортных средств, находящихся в кадре, после чего сравнивают получаемые независимо друг от друга посредством радиолокатора и видеокамеры панорамного обзора потоки данных, содержащие значения скоростей и координат всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна, причем для получения метрологически достоверных данных о скоростях и координатах Yi ТС используют данные радиолокатора, а за достоверные данные о координатах Xi тех же ТС принимают данные, полученные от видеокамеры панорамного обзора, каждому ТС, нарушающему скоростной режим, обеспечивают дальнейшее сопровождение до момента распознавания государственного регистрационного знака, затем видеокамерой распознавания государственного регистрационного знака формируют кадр изображения ТС-нарушителя с распознанным государственным регистрационным знаком, датой, временем, зафиксированной скоростью и идентификатором видеокамеры, что позволяет осуществлять автоматическую регистрацию нарушений правил дорожного движения.
2. Способ по п.1, отличающийся тем, что сравнение получаемых независимо друг от друга посредством радиолокатора и видеокамеры панорамного обзора потоков данных, содержащих скорости и координаты всех транспортных средств, находящихся в текущий момент на выбранном участке дорожного полотна, осуществляют, например, корреляционным методом.
3. Устройство для определения скорости движения и координат транспортных средств, содержащее радиолокатор, по крайней мере, одну видеокамеру распознавания государственного регистрационного знака для записи и распознавания государственных регистрационных знаков ТС, нарушающих скоростной режим, и блок управления и обработки данных, соединенный с ними, отличающееся тем, что радиолокатор содержит модуль обработки сигналов, обеспечивающий вычисление скорости и дальности всех ТС, находящихся на выбранном участке дорожного полотна, при этом в устройство введена видеокамера панорамного обзора, которая соединена с блоком управления и обработки данных, который снабжен программным обеспечением для синхронизации работы радиолокатора и видеокамеры панорамного обзора, сравнения их потоков данных, получения метрологически достоверных результатов скоростей и координат ТС, нарушивших скоростной режим, идентификации ТС-нарушителя и передачи данных для автоматической регистрации нарушений правил дорожного движения.
4. Устройство по п.3, отличающееся тем, что функции видеокамеры панорамного обзора и функции видеокамеры распознавания государственного регистрационного знака выполняет одна широкоугольная мегапиксельная видеокамера.
5. Устройство по п.3, отличающееся тем, что в качестве видеокамеры распознавания государственного регистрационного знака используется несколько обычных видеокамер в соответствии с количеством полос движения.
| US 6266627 B1, 24.07.2001 | |||
| Поршень для двигателя внутреннего сгорания | 1990 |
|
SU1744292A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2292085C1 |
| Устройство для непрерывного брожения теста и т.п. продуктов | 1946 |
|
SU68741A1 |

