Область техники
Изобретение относится к транспортным средствам с электромеханической трансмиссией (ЭМТ), в том числе к гибридным, имеющим в своем составе управляемый по развиваемому на валу моменту мотор-генератор (генераторы), работающий от теплового двигателя (двигателей), например двигателя внутреннего сгорания, и формирующий (формирующие) напряжение шины постоянного тока, и управляемый тяговый электродвигатель (двигатели), работающий (работающие) от той же шины постоянного тока и формирующий желаемый момент (тяговое усилие) и скорость вращения ведущих колес (скорость движения транспортного средства в целом). Такая схема тягового оборудования получила название «последовательная кинематическая схема» и широко применяется в современных транспортных средствах.
В общем случае комплект тягово-энергетического оборудования (КТЭО) электромеханической трансмиссии (ЭМТ) состоит из:
- первичных источников энергии (например, теплового двигателя (ТД) - в частности, двигателя внутреннего сгорания (ДВС),
- контроллеров ТД, обеспечивающих требуемый момент (частоту вращения, мощность) ТД;
- шины постоянного тока (ШПТ), с которой может быть электрически соединен источник постоянного напряжения ограниченной мощности (например, конденсаторный фильтр, буферный электрохимический накопитель, аккумуляторная батарея, топливный элемент и т.д.),
- мотор-генераторов (МГ) - электрических машин, механически соединенных непосредственно или через устройство механического сопряжения (редуктор, коробка передач и т.п.) с выходным валом ДВС, основное назначение которых - генерация электрической мощности,
- тяговых электродвигателей (ТЭД) - электрических машин, механически соединенных непосредственно или через передачу с движителями или вспомогательными механизмами транспортного средства, основное назначение которых - приводить во вращение движители (колеса, гусеницы и т.п.) или вспомогательные механизмы транспортного средства,
- силовых преобразователей (СП), электрически соединенных с ШПТ и с МГ и ТЭД, основное назначение которых - формировать требуемый электромагнитный момент (электрическую мощность) каждой электрической машины,
- контроллеров силовых преобразователей (КСП), назначение которых - управление силовыми преобразователями с целью обеспечить реализацию ТЭД и МГ требуемого электромагнитного момента (скорости вращения, мощности),
- контроллеров верхнего уровня (КВУ), назначение которых - согласованное управление всеми элементами КТЭО для реализации оптимальных режимов его работы,
- систем и органов контроля, управления, отображения и записи информации о состоянии КТЭО для водителя (оператора) и другого обслуживающего персонала,
- вспомогательных систем (рабочих органов, приводимых в движение от вала отбора мощности (ВОМ), источников питания, систем охлаждения и т.п.).
Контроллеры, перечисленные выше, могут быть выполнены в виде отдельных электронных блоков или быть частично (полностью) объединены в едином электронном блоке. Также могут быть конструктивно объединены СП. Например, все СП могут входить в состав блока силовой электроники (БСЭ) КТЭО.
Комплект электроприводов, первичный источник энергии и трансмиссия как объект управления представляет сложную взаимосвязанную нелинейную динамическую систему. В такой системе должен выполняться ряд ограничений на управления и переменные состояния: ограничение напряжений питания двигателей, токов, моментов, скоростей вращения, диапазона изменения напряжения ШПТ. Для управления КТЭО необходима разработка специальных алгоритмов, обеспечивающих автономную работу отдельных устройств и обеспечивающих устойчивое согласованное управление всеми устройствами КТЭО, включая первичный источник энергии.
Уровень техники
Из уровня техники известен способ управления энергосистемой гибридного транспортного средства (WO 2010/130284 A1, МПК B60W 10/06, B60W 10/08, B66F 9/075, опубл. 18.11.2010), включающей: ДВС, управляемый таким образом, что он работает с желательной частотой вращения (RPMdesired); электрический мотор-генератор, приводимый от ДВС и выдающий на выходе электроэнергию; по крайней мере одно устройство, потребляющее электроэнергию, конструктивно приводимое при помощи ДВС, и которое может приводиться во вращение при помощи мотор-генератора (мотор-колеса, приводы гидравлических насосов и т.п.); и устройство - накопитель электроэнергии, присоединенное к электрическому мотор-генератору и сконструированное с возможностью получать электроэнергию, генерируемую на выходе электрического мотор-генератора. Способ включает этапы: определения реальной скорости вращения ДВС (RPMactual); и если она (RPMactual) снижается относительно желательной скорости вращения ДВС (RPMdesired), управление электрическим мотор-генератором таким образом, чтобы он выдавал на выходе постепенно уменьшающуюся электрическую мощность.
Также известна система электродвижения автономных объектов (RU 2436691 C1, МПК B60L 11/08, B60W 20/00, B60W 10/08, опубл. 20.12.2011). Изобретение относится к системам электродвижения переменного тока автономных объектов на базе двигателя внутреннего сгорания (ДВС) (дизельного, бензинового или газового) и генератора переменного тока (синхронного или асинхронного) и предназначено для питания тягового электродвигателя переменного тока (синхронного или асинхронного), работающего с переменной частотой вращения, а также для обеспечения потребителей бортовой сети автономного объекта электроэнергией со стабилизированными параметрами частоты и амплитуды переменного напряжения или стабилизированным постоянным напряжением.
Недостатком вышеуказанных технических решений является отсутствие в них возможности оптимального распределения требуемого потока мощности между элементами электромеханической трансмиссии.
Также недостатком известных способов согласованного управления электромеханической трансмиссией транспортных средств является отсутствие в них учета ряда существенных факторов, присущих реальным комплектам тягового привода транспортных средств. К таким факторам относится, в частности, неопределенность исходных параметров движения: требуемая тяговая мощность заранее не известна, она определяется текущими условиями движения и желаниями водителя; имеющийся резерв мощности также заранее не известен или известен недостаточно точно. Например, максимальная мощность ТД зависит от многих факторов, таких как качество топлива, атмосферное давление и влажность воздуха, температура, наконец, состояние (износ) ТД. Изменяется также уровень потерь и КПД тягово-энергетического оборудования, изменяется мощность, потребляемая от ТД вспомогательными бортовыми устройствами. В этих условиях необходимо обеспечить баланс мощностей автоматически, не требуя точных данных о состоянии и режиме работы устройств. Кроме того, характеристики оптимального рабочего режима также изменяются и не могут быть точно определены заранее. Известные способы неэффективны в условиях неопределенности указанных факторов. Их применение неизбежно приведет к снижению общего КПД комплекта тягово-энергетического оборудования, ухудшению параметров работы отдельных устройств, недоиспользованию ресурсов КТЭО по моменту и мощности или перегрузкам (по механическим, электрическим, тепловым параметрам) электрических машин, тепловых двигателей и силовых преобразователей в условиях вариации параметров и условий работы КТЭО.
Наиболее близким техническим решением по отношению к заявленному изобретению является способ согласованного управления электромеханической трансмиссией транспортных средств (RU 2010114407 A, опубл. 20.10.2011, МПК B60L 11/18, B60W 20/00, B60L 15/20), заключающийся в том, что предварительно задают минимальное, максимальное и номинальное значения напряжений шины постоянного тока, минимальное и максимальное значения скорости вращения тягового электродвигателя, нижнюю и верхнюю границы регулирования момента по скорости вращения тягового электродвигателя, максимально допустимую величину электромагнитного момента тягового электродвигателя, минимальное и максимальное значения скорости вращения мотор-генератора, нижнюю и верхнюю границы регулирования момента по скорости вращения мотор-генератора, максимально допустимую величину электромагнитного момента мотор-генератора, диапазон стабилизации скорости вращения теплового двигателя.
В предложенном в заявке RU 2010114407 A способе для согласованного управления ЭМТ осуществляют ограничения:
момента МГ и ТЭД по напряжению шины постоянного тока,
двигательного момента ТЭД по скорости его вращения,
момента МГ по скорости его вращения,
момента МГ по отклонению скорости вращения приводящего его теплового двигателя от заданного значения.
Данный подход не всегда эффективен, потому что поддержание скорости вращения ДВС и напряжения ШПТ на заданном уровне достигается наложением ограничений на источник энергии (МГ), а не на ее потребитель (ТЭД). Эмпирически определено, что ограничение момента МГ, при отклонении скорости вращения приводящего его ДВС от заданного значения, может приводить к так называемому эффекту «энергетической ямы».
Механизм возникновения «энергетической ямы» следующий. При снижении напряжения ШПТ начинают ограничиваться моменты МГ и ТЭД. Мощность, необходимая ТЭД, определяется по уже ограниченному моменту ТЭД. В результате мощность ТЭД оказывается ниже необходимой для движения с требуемой скоростью. На ДВС и МГ поступают пониженные задания мощности и момента, ими вырабатывается пониженная мощность, из-за чего момент ТЭД не может выйти из пределов ограничений.
Кроме того, если из-за неточного задания максимального момента или неточного определения момента МГ превышен максимальный момент для данных оборотов, система ДВС-МГ переходит в рабочую точку, где достигается равенство реализуемого и максимального моментов МГ. Вся система стабилизируется на уровне мощности, много меньшей, чем требуемая потребителями. В результате ДВС, МГ и ТЭД начинают работать в точках, далеких от оптимальных.
Еще одним недостатком указанного технического решения является то, что в нем не рассматриваются вопросы распределения заданий мощностей (моментов) в ЭМТ, включающий более одного ТД, МГ, ТЭД, что существенно сужает возможности его применения в различных транспортных средствах, например транспортных средствах с тяговыми электроприводами типа «мотор-ось» и «мотор-колесо».
В предложенном в заявке RU 2010114407 A способе также не учтен ряд моментов. Так, не обеспечивается оптимальное управление параметрами работы ТД (скорость вращения, мощность, момент), а только поддерживается заданная скорость его вращения, которая может существенно отличаться от оптимальной при данной нагрузке. Не учтена специфика управления ТД: значения их максимальной мощности и предельного момента точно не известны, они могут изменяться и зависят от многих факторов (качество топлива, температура, влажность, ресурс и т.д.). Если по каким-либо причинам мощность и предельный момент снизились, а момент МГ останется прежним, то ТД может не набрать требуемой по топливной эффективности скорости вращения и не обеспечить съем максимальной мощности. Более того, ограничение электромагнитного момента МГ только одним максимально допустимым значением (независимо от скорости вращения МГ) может привести к тому, что на валу приводного ДВС возникнет перегрузка, и он будет заглушен.
Раскрытие изобретения
Предлагаемое изобретение обеспечивает ряд технических результатов.
Во-первых, обеспечивается реализация плавного ограничения моментов электрических машин при подходе к границам рабочих диапазонов напряжения ШПТ и скоростей вращения. Вследствие инерционности изменения напряжения ШПТ и скоростей вращения, значения электромагнитного момента ТЭД и МГ плавно устанавливаются такими, при которых ограничиваемые переменные остаются в пределах рабочих диапазонов. При этом ТЭД либо выполняют команду водителя, либо потребляют ровно столько мощности, сколько могут обеспечить ТД - МГ на тягу (за вычетом мощности других потребителей). Такой способ управления гарантирует сохранение рабочих диапазонов мощностей, скоростей вращения и напряжений всех элементов КТЭО.
Во-вторых, предлагаемый способ обеспечивает управление потоками мощности в ЭМТ только за счет ограничения двигательного и генераторного моментов МГ и ТЭД в функции напряжения шины постоянного тока Ud. Информации о текущем значении Ud достаточно для автоматического выполнения условия баланса мощностей. Это отличает предлагаемый способ от известных из уровня техники, в которых критерий оптимальности распределения потоков мощности задается априорно, без учета изменения реальных параметров движения и характеристик КТЭО.
В-третьих, в предлагаемом способе обеспечивается работа КТЭО при предельных нагрузках, которые вызывают падение скорости движения до значений, соответствующих максимальной мощности ТД или максимальному моменту ТЭД. При этом момент МГ устанавливается таким, чтобы обеспечить максимальную топливную эффективность ТД (определяется по многопараметровой характеристике ТД) или другой оптимизируемый параметр при той мощности, которая определяется текущими условиями движения.
Для случая, когда момент МГ определяется по требуемой скорости вращения ТД, которая может отличаться от фактической, предлагаемый способ учитывает тот факт, что значения максимальной мощности и предельного момента ТД точно не известны, они могут изменяться и зависят от многих факторов (качество топлива, температура, влажность, ресурс и т.д.). Для обеспечения разгона ТД и снятия максимальной мощности в этом случае момент МГ ограничивают максимальным значением, которое задается в виде зависимости от скорости вращения МГ (характеристики предельного момента МГ).
Наклон характеристики в области низких скоростей вращения, и значение максимального момента МГ выбираются с учетом требований обеспечения необходимой динамики набора скорости ТД, и гарантированного отбора максимальной мощности при больших скоростях вращения ТД.
В-четвертых, в предлагаемом способе для обеспечения работы КТЭО при неизвестных точно максимальной мощности ТД и моменте МГ используются дополнительные ограничения момента МГ. Эти ограничения позволяют обеспечить управление ТД на регуляторной ветви работы, которая характеризуется устойчивой и экономичной работой двигателя, и предотвратить выход ТД на корректорную ветвь работы, которая характеризуется неустойчивой работой и повышенным потреблением топлива с «дымящим» выбросом. Либо, если это необходимо в конкретном применении (например, для получения предельной мощности), указанные ограничения позволяют обеспечить работу ТД в заданном диапазоне (точке) корректорной ветви работы.
В-пятых, в предлагаемом способе обеспечивается оптимальная работа КТЭО (с максимальным КПД, топливной эффективностью и т.п.). Оптимальная работа КТЭО обеспечивается за счет того, что используются оптимальные в отношении заданного критерия зависимости момента МГ от скорости вращения приводного ТД, требуемой скорости вращения ТД - от требуемой мощности.
При этом в качестве критерия оптимальности работы КТЭО могут выбираться:
- минимальный расход топлива ТД,
- совокупный КПД ТД и/или элементов или совокупности элементов ЭМТ,
- требуемое сочетание минимального расхода топлива ТД и максимального совокупного КПД ТД и/или элементов или совокупности элементов ЭМТ и т.п.
В-шестых, предлагаемый способ обеспечивает более быструю реакцию КТЭО на отклонение фактической скорости вращения ТД от требуемой. Быстродействие данного способа управления обеспечивается за счет того, что ограничение момента при отклонении скорости вращения ТД от задания применяется к ТЭД, т.е. к основным потребителям мощности КТЭО, а не к МГ, как это предлагается в аналогичных изобретениях. При этом исключается снижение напряжения ШПТ, связанное с ограничением момента МГ, которое негативно влияет на работу КТЭО. Также увеличивается быстродействие системы управления МГ за счет исключения контура управления моментом МГ по отклонению скорости ТД от задания.
Применение такого ограничения исключает возможность появления эффекта «энергетической ямы» в КТЭО. Мощность, развиваемая ТД на данных оборотах для КТЭО транспортного средства, расходуется на:
- потребителей электроэнергии КТЭО (в частности, для набора кинетической энергии транспортного средства и на преодоление сил трения для разгона транспортного средства посредством ТЭД, для др. потребителей электроэнергии),
- приведение вращающихся масс (например, ТД-МГ).
Если суммарная мощность всех МГ, приводимых от данного ТД, начинает превышать мощность, потребляемую в виде электроэнергии, то двигателю начинает не хватать мощности на приведение ТД-МГ во вращение, что приводит к уменьшению скорости его вращения, а соответственно и выдаваемой мощности в целом.
В предлагаемом способе, если мощность МГ, приводимых от ТД, становится больше предельной мощности ТД, то снижение фактической скорости вращения ТД относительно требуемой, ограничивается за счет снижения требуемого момента ТЭД. При этом мощности ТД всегда хватает, чтобы ТД мог преодолеть силы трения для разгона и выхода на требуемую (большую) мощность (требуемую скорость вращения), а ограничение момента ТЭД позволяет учесть неизвестную заранее и не рассчитываемую мощность сторонних потребителей.
Ограничение суммарного момента ТЭД не ведет к снижению напряжения ШПТ, что в свою очередь не приводит к работе ограничений моментов МГ и ТЭД по Ud. КТЭО стабилизируется на уровне мощности, требуемой потребителями.
Основное функциональное назначение совокупности ограничений момента в рамках предлагаемого способа управления состоит не столько в ограничении переменных, сколько в установлении требуемого баланса генерируемой и потребляемой мощности, т.е. в регулировании потоков мощности. При этом не требуется дополнительная (зачастую сложно получаемая или неточная) информация. В частности, не требуется получение точных данных: о максимальной и текущей мощности ТД (с учетом неопределенности пределов генерируемой мощности и мощности, потребляемой вторичными системами и ВОМ, это проблематично), о мощности, необходимой для движения в условиях неопределенности сопротивления движению, о максимальной имеющейся мощности ТД на тягу и т.п. Приводы МГ и ТЭД взаимно компенсируют мощность, передаваемую на ШПТ и потребляемую от ШПТ, при ограничении мощности ТД имеющимся резервом.
Указанные технические результаты достигаются благодаря применению способа согласованного управления электромеханической трансмиссией транспортного средства, включающей один тепловой двигатель или более, причем с каждым тепловым двигателем механически соединен один или несколько мотор-генераторов, и включающей один или несколько тяговых электродвигателей, и один или несколько электронных блоков, управляющие элементами электромеханической трансмиссии в отдельности и/или трансмиссией в целом, причем мотор-генераторы и тяговые электродвигатели соединены с шиной постоянного тока через свои силовые преобразователи, заключающийся в том, что предварительно задают минимальное Udmin и максимальное Udmax значения напряжения шины постоянного тока, нижнюю U'dmin и верхнюю U'dmax границы регулирования момента мотор-генераторов и тяговых электродвигателей по напряжению, минимальное Ntmin(c) и максимальное Ntmax(c) значения скорости вращения каждого тягового электродвигателя, нижнюю N'tmin(c) и верхнюю N'tmax(c) границы регулирования его момента по скорости вращения, максимально допустимую величину его электромагнитного момента Mztmax(c), минимальное Ngmin(d) и максимальное Ngmax(b) значение скорости вращения каждого мотор-генератора, нижнюю N'gmin(b) и верхнюю N'gmax(b) границы регулирования его момента по скорости вращения, минимальную ΔNДmin(a) и максимальную ΔNДmax(a) разницу фактической и требуемой скорости вращения каждого теплового двигателя, нижнюю ΔN'min(a) и верхнюю ΔN'Дmax(a) границы регулирования суммарного момента тяговых электродвигателей по разнице фактической и требуемой скорости вращения каждого теплового двигателя, для каждого теплового двигателя задают зависимость требуемой величины скорости вращения от требуемой мощности NzД(a)=f(PzД(a)), зависимость полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от требуемой Mzg(a)=f(NzД(a)) или фактической Mzg(a)=f(NД(a)) скорости его вращения, причем если задают зависимость Mzg(a)=-f(NzД(a)), то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от фактической скорости его вращения Mgпред(a)=f(NД(a)), в каждый момент времени задают требуемую величину суммарного электромагнитного момента Mzt тяговых электродвигателей, которую распределяют по тяговым электродвигателям, определяя требуемый момент каждого из них Mzt(c), не превышающий его заданную максимально допустимую величину Mztmax(c), определяют напряжение шины постоянного тока Ud, скорость вращения Ng(b) каждого мотор-генератора и скорость вращения Nt(c) каждого тягового электродвигателя, фактическую скорость вращения NД(a) каждого теплового двигателя, требуемую мощность каждого тягового электродвигателя Pzt(c), с учетом Pzt(c) определяют требуемую величину суммарной мощности мотор-генераторов Pzg определяют необходимое для ее генерирования количество тепловых двигателей и связанных с ними мотор-генераторов и обеспечивают их работу, распределяют по тепловым двигателям требуемую величину суммарной мощности мотор-генераторов Pzg, задавая мощность, которую должен обеспечить каждый находящийся в работе тепловой двигатель РzД(a), по заданной для каждого теплового двигателя зависимости NzД(a)=f(PzД(a)) или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства, определяют требуемую скорость его вращения NzД(a) и реализуют ее, определяют по заданной для каждого теплового двигателя зависимости Mzg(a)=f(NzД(a)) или Mzg(a)=f(NД(a)) или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства суммарный электромагнитный момент Mzg(a), который должны обеспечить мотор-генераторы, приводимые от каждого а-го теплового двигателя, причем если его определяют по зависимости Mzg(a)=f(NzД(a)), то дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого а-го теплового двигателя, по заданной для каждого теплового двигателя зависимости Mgпред(a)=f(NД(a)), и если определенные Mzg(a) превышают Мgпред(a), то Mzg(a) задают равными Мgпред(а); далее определяют разницу ΔNД(a) фактической и требуемой скорости вращения каждого теплового двигателя, суммарный электромагнитный момент, который должны обеспечить все мотор-генераторы, входящие в электромеханическую трансмиссию Mzg=ΣMzg(a), и реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg, равную произведению Mzg на коэффициент k1, и распределяют ее по мотор-генераторам, определяя реализуемый электромагнитный момент Mrg(b) каждого из них, далее определяют реализуемую величину суммарного электромагнитного момента Mrt тяговых электродвигателей, равную произведению Mzt на наименьший из коэффициентов k2 и k3, и распределяют реализуемую величину суммарного электромагнитного момента по тяговым электродвигателям, определяя реализуемый момент каждого из них Mrt(c), и создают электромагнитный момент каждого тягового электродвигателя, равный произведению Mrt(c) на коэффициент k4(c), и электромагнитный момент каждого мотор-генератора, равный произведению Мrg(b) на коэффициент k5(b), где
а - индекс, соответствующий номеру теплового двигателя,
b - индекс, соответствующий номеру мотор-генератора,
c - индекс, соответствующий номеру тягового электродвигателя,
k1 - коэффициент ограничения суммарного момента мотор-генераторов по Ud,
k2 - коэффициент ограничения суммарного момента тяговых электродвигателей по Ud,
k3 - коэффициент ограничения суммарного момента тяговых электродвигателей по отклонению фактических скоростей вращения тепловых двигателей от соответствующих требуемых скоростей вращения,
k4(c) - коэффициент ограничения двигательного момента каждого тягового электродвигателя по Nt(c),
k5(b) - коэффициент ограничения момента каждого мотор-генератора по Ng(b),
причем значения коэффициентов k1, k2, k3, k4, k5 лежат в интервале [0, 1] и выбираются в зависимости от того, является ли режим работы соответствующей электрической машины генераторным или двигательным и от соответствующих каждому коэффициенту значений, лежащих внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, и изменение k1, k2, k3, k4 и k5 происходит в монотонно возрастающей или монотонно убывающей функции соответствующей данному коэффициенту величины ограничивающего параметра.
В одном из вариантов выполнения способа коэффициенты ограничения k1, k2, k3, k4 и k5 определяют исходя из следующих условий:




где
k3(a) - коэффициент ограничения суммарного момента тяговых электродвигателей по ΔNД(a),
A(x, x1, x2) - любая монотонно возрастающая в диапазоне значений от 0 до 7 функция аргумента x при возрастании x в диапазоне (х1, x2),
В(x, x1, х2) - любая монотонно убывающая в диапазоне значений от 7 до 0 функция аргумента x при возрастании x в диапазоне (x1, x2).
В еще одном из вариантов выполнения способа задают зависимости Mzg(a)=f(NzД(a)) и NzД(a)=f(PzД(a)) или Мzg(a)=f(NД(a)) и NzД(a)=f(PzД(a)) оптимальными в отношении критерия расхода топлива тепловых двигателей, или в отношении критерия совокупного коэффициента полезного действия тепловых двигателей и/или элементов или совокупности элементов электромеханической трансмиссии транспортного средства, или в отношении определенного сочетания указанных критериев.
В еще одном из вариантов выполнения способа предварительно задают коэффициент полезного действия электромеханической трансмиссии η в виде константы или зависимости от одного или ряда параметров режима работы элемента или совокупности элементов электромеханической трансмиссии транспортного средства и в каждый момент времени при определении требуемой величины суммарной мощности мотор-генераторов Pzg учитывают заданный η.
В еще одном из вариантов выполнения способа задают минимальную ΔNДmin(a) и максимальную ΔNДmax(a) разницу фактической и требуемой скорости вращения каждого теплового двигателя, нижнюю ΔN'Дmin(a) и верхнюю ΔN'Дmax(a) границы регулирования суммарного момента тяговых электродвигателей по разнице ΔNД(a) фактической и требуемой скорости вращения каждого теплового двигателя в зависимости от требуемой скорости вращения данного теплового двигателя ΔNДmin(a)=f(NzД(a)) и ΔNДmax(a)=f(NzД(a)), ΔN'Дmin(a)=f(NzД(a)) и ΔN'Дmax(a)=f(NzД(a)) соответственно. Краткое описание чертежей
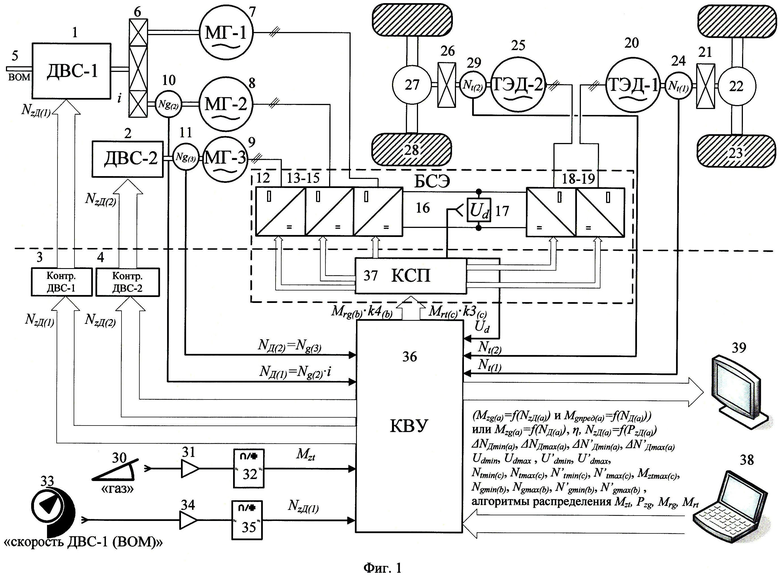
На фиг.1 представлено транспортное средство, в частности сельскохозяйственный полноприводный колесный трактор с КТЭО.
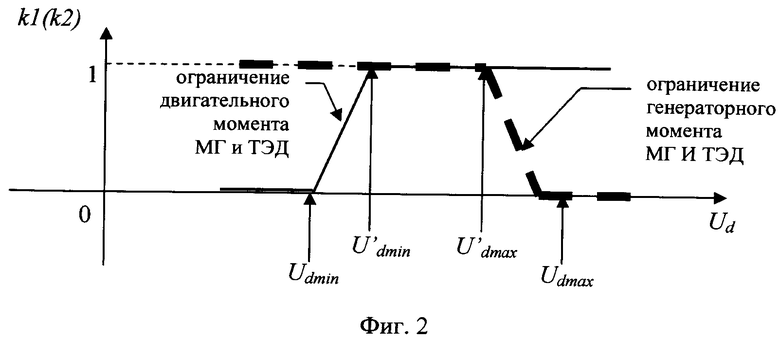
На фиг.2 представлены характеристики k1=f(Ud) и k2=f(Ud), поясняющие ограничение суммарного момента всех МГ и всех ТЭД по напряжению шины постоянного тока Ud.
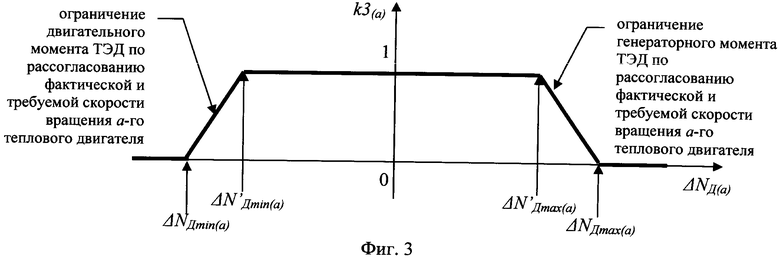
На фиг.3 представлена характеристика k3(a)=f(ΔNД(a))', поясняющая ограничение суммарного момента всех ТЭД по разнице ΔNД(a) фактической и требуемой скорости вращения a-го ТД.
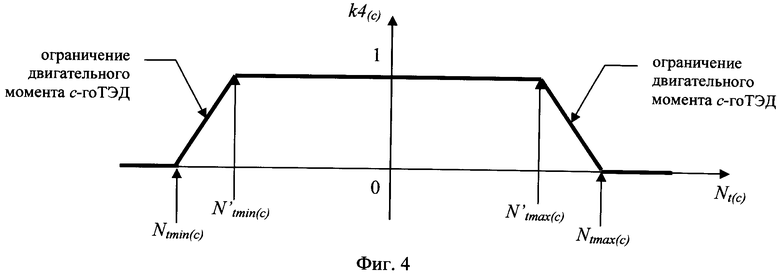
На фиг.4 представлена характеристика k4(c)=f(Nt(c)), поясняющая ограничение двигательного момента каждого ТЭД по величине его скорости вращения Nt(c).
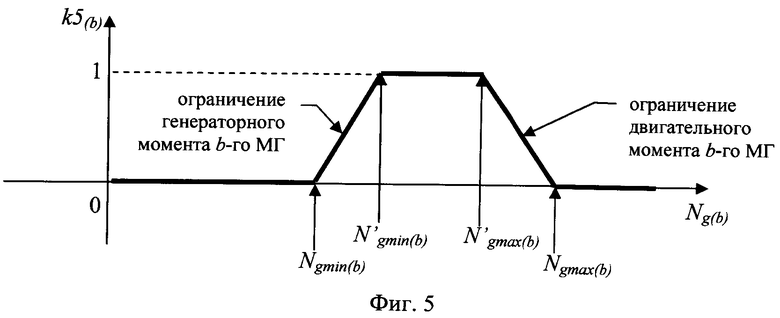
На фиг.5 представлена характеристика k5(b)=f(Ng(b)), поясняющая ограничение момента каждого МГ по скорости его вращения Ng(b).
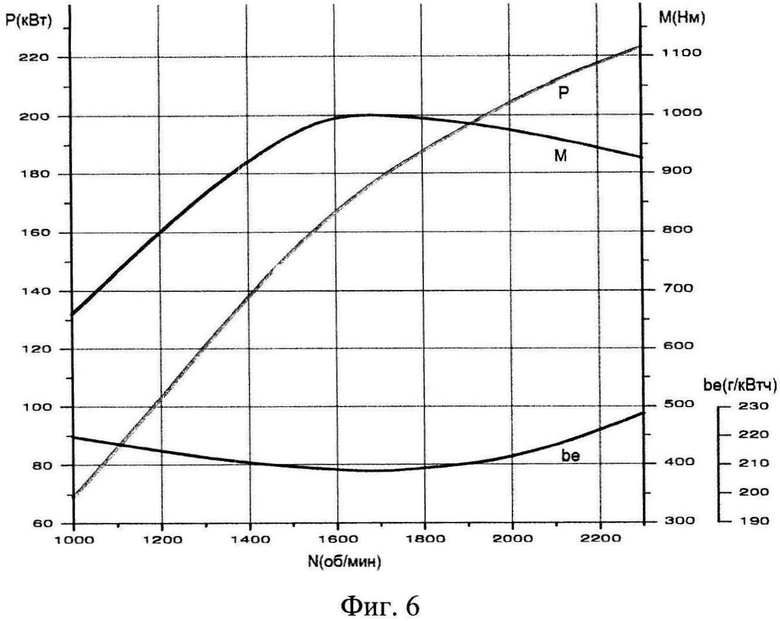
На фиг.6 представлен пример простейшего вида характеристики параметров конкретного ДВС (вращающего момента M, полной мощности P и расхода топлива be) в зависимости от скорости вращения N ДВС.
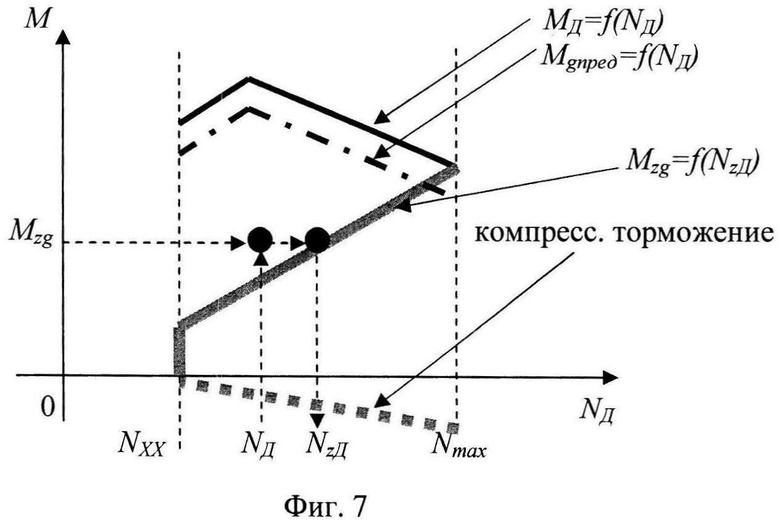
На фиг.7 представлено схематичное изображение моментной характеристики ДВС и соединенного с ним МГ.
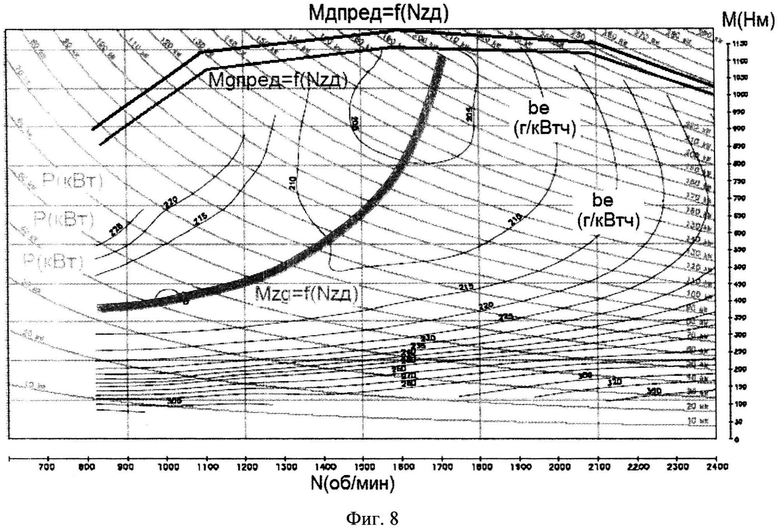
На фиг.8 представлен пример полного вида многопараметровой характеристики конкретного ДВС (момента, мощности и расхода топлива) в зависимости от скорости вращения ДВС, с нанесенными кривыми требуемого Mzg и предельного Мgпред момента мотор-генератора, приводимого от данного ДВС.
Осуществление изобретения
Способ оптимального согласованного управления электромеханической трансмиссией транспортного средства поясняется на примере транспортного средства (автомобиля, трактора и т.п.) с ЭМТ переменно-переменного тока, представленного на фиг.1.
Для удобства дальнейшего описания примера реализации изобретения введем следующие обозначения:
a - индекс, соответствующий номеру теплового двигателя,
b - индекс, соответствующий номеру мотор-генератора,
c - индекс, соответствующий номеру тягового электродвигателя,
A(x, x1, x2) - любая монотонно возрастающая в диапазоне значений от 0 до 7 функция аргумента x при возрастании x в диапазоне (x1, x2),
B(x, x1, x2) - любая монотонно убывающая в диапазоне значений от 7 до 0 функция аргумента x при возрастании x в диапазоне (x1, x2).
Трактор, представленный на фиг.1, имеет два двигателя внутреннего сгорания: основной (ДВС-1) 1 и дополнительный (ДВС-2) 2 с управляющими этими двигателями контроллерами 3 и 4. Причем основной ДВС 1 имеет выведенный вал отбора мощности 5 для привода различного оборудования, например навесных сельскохозяйственных орудий.
ДВС 1 через механический двухвходовой суммирующий редуктор 6 приводит во вращение два асинхронных мотор-генератора 7 и 8 (соответственно МГ-1 и МГ-2), причем передаточное отношение редуктора i для обоих МГ одинаковое iab=i11=i12=NД(1)/Ng(2). ДВС-1 и приводимые от него МГ используются при средних и малых нагрузках трактора.
ДВС 2 непосредственно приводит во вращение асинхронный мотор-генератор 9 (МГ-3). ДВС 2 включается в работу при пиковых нагрузках трактора, например на пахоте. Он также может включаться в работу на стоянке при отключенном ДВС-1, например, для питания бортового оборудования трактора или для заряда аккумуляторных батарей и т.п.
На валу МГ-2 установлен датчик скорости вращения 10, сигнал которого Ng(2), соответствующий частоте вращения МГ-2, позволяет определить фактическую скорость вращения ДВС-1, равную NД(1)=Ng(2)·i. Поскольку i=i11=i12, то скорости вращения мотор-генераторов 7 и 8 равны Ng(1)=Ng(2).
На валу МГ-3 установлен датчик скорости вращения 11, сигнал которого Ng(3) соответствует скорости вращения МГ-3, равной фактической скорости вращения приводящего его ДВС-2 NД(1)=Ng(3).
Мотор-генераторы 7, 8 и 9 выдают переменное трехфазное напряжение на вход размещенных в блоке силовой электроники (БСЭ) трактора 12 соответствующих выпрямителей 13-15.
Выходы всех выпрямителей 13-15 соединены посредством шины постоянного тока 16 БСЭ с входами инверторов 18-19, также размещенных в БСЭ 12. К шине постоянного тока подключен датчик напряжения 17, измеряющий мгновенное значение напряжения на ней Ud.
К выходу инвертора 19 подключен тяговый асинхронный электродвигатель (ТЭД-1) 20, который через свой редуктор 21 и дифференциал 22 приводит во вращение передний мост 23 трактора. На одном валу с двигателем 20 установлен датчик скорости его вращения Nt(1) 24. К выходу инвертора 18 подключен тяговый асинхронный электродвигатель (ТЭД-2) 25, который через свой редуктор 26 и дифференциал 27 приводит во вращение задний мост 28 трактора. На одном валу с двигателем 25 установлен датчик скорости его вращения Nt(2) 29. Таким образом, в описываемом тракторе реализована схема полного привода с мотор-осями с многодвигательным тяговым электроприводом.
Скорости вращения электрических машин КТЭО (МГ и ТЭД) Ng(t) и Nt(c) могут не только измеряться непосредственно, но и определяться (корректироваться) по измеренным электрическим параметрам соответствующих машин (например, по измеренным мгновенным значениям их фазных токов и напряжений) (см. примеры - Виноградов А.Б.: Векторное управление электроприводами переменного тока. Учебное пособие. - Иваново: ГОУВПО «Ивановский государственный энергетический университет им. В.И. Ленина», 2008, 298 с., с.234-244).
Требуемый суммарный электромагнитный момент Мzt тяговых асинхронных двигателей задается в каждый момент времени педалью «газ» 30, установленной в кабине водителя трактора, его величина передается через усилитель 31 и аналого-цифровой преобразователь 32. В транспортных средствах задание суммарного электромагнитного момента тяговых двигателей может также определяться контроллером верхнего уровня (КВУ), который осуществляет согласованное управление всеми устройствами, входящими в КТЭО. Задание Мzt может формироваться КВУ на основе анализа условий движения транспортного средства или специальным регулятором скорости движения и т.п.
Требуемая скорость вращения ДВС задается в каждый момент времени КВУ 36. В общем случае в транспортных средствах скорость вращения ДВС может определяться условиями работы рабочих органов, приводящихся в движение от теплового двигателя, или по максимальной топливной эффективности теплового двигателя и т.п. В таком случае требуемая скорость вращения ДВС определяется программным обеспечением, предварительно введенным в КВУ или в контроллеры ДВС 3 и 4. В описываемом тракторе требуемая скорость ДВС-1 NzД(1) задается либо КВУ 36, либо потенциометром «скорость ДВС-1 (ВОМ)» 33, установленным в кабине водителя трактора. Задание NzД(1) от потенциометра имеет программно реализованный приоритет перед заданием контроллера 36. Причем начальное положение потенциометра соответствует его отключенному состоянию. В этом состоянии скорость вращения задается КВУ самостоятельно. Если потенциометр 33 включен, заданная им величина NzД(1) передается через усилитель 34 и аналого-цифровой преобразователь 35 в КВУ 36, откуда передается по каналу связи в контроллер ДВС 3. Аппаратно реализуется условие задания NzД(1) в допустимых пределах. Задание NzД(1) потенциометром 33 необходимо для независимого регулирования скорости вращения ДВС-1 при работе его с подключенными к ВОМ 5 навесными сельскохозяйственными орудиями, т.к. большинство таких орудий рассчитаны на работу с фиксированной скоростью вращения.
Контроллер верхнего уровня 36, осуществляющий согласованное управление всеми элементами КТЭО, может быть создан на базе современного цифрового программируемого контроллера (микро-ЭВМ).
Он управляет ДВС посредством передачи в их контроллеры 3, 4 задания требуемых скоростей их вращения NzД(1) и NzД(2).
КВУ 36 также управляет всеми МГ и ТЭД посредством передачи в контроллер силовых преобразователей (КСП) 37, размещенный в БСЭ 12 вместе с силовыми преобразователями 13-15, 18-19, заданий создаваемых каждым МГ и ТЭД электромагнитных моментов. В свою очередь КСП преобразует эти задания в сигналы управления (открытия и закрытия) силовых ключей выпрямителей 13-15 и инверторов 18-19.
В КВУ 36 посредством ПЭВМ 38 предварительно вводят ряд данных.
В частности, вводят:
- минимальное Udmin, максимальное Udmax напряжения шины постоянного тока, нижнюю U'dmin и верхнюю границу U'dmax регулирования момента МГ и ТЭД по напряжению,
- минимальное Ntmin(c) и максимальное Ntmax(c) значение скорости вращения каждого ТЭД, нижнюю N'tmin(c) и верхнюю границу N'tmax(c) регулирования его момента по скорости вращения, максимально допустимую величину его электромагнитного момента Mztmax(c),
- минимальное Ngmin(b) и максимальное Ngmax(b) значение скорости вращения каждого МГ, нижнюю N'gmin(b) и верхнюю N'gmax(b) границу регулирования их моментов по скорости вращения,
- минимальное Ngmin(b) и максимальное Ngmax(b) значение скорости вращения каждого мотор-генератора, нижнюю N'gmin(b) и верхнюю N'gmax(b) границы регулирования его момента по скорости вращения,
- минимальную ΔN'Дmin(а) и максимальную ΔNДmax(a) разницу, нижнюю ΔN'Дmin(a) и верхнюю ΔN'Дmax(a) границы регулирования суммарного момента тяговых электродвигателей по рассогласованию фактической и требуемой скорости вращения каждого теплового двигателя.
Минимальная ΔNДmin(a) и максимальная ΔNДmax(a) разница, нижняя ΔN'Дmin(a) и верхняя ΔN'Дmax(a) границы регулирования суммарного момента тяговых электродвигателей по рассогласованию фактической и требуемой скорости вращения каждого теплового двигателя могут задаваться как в виде констант, так и в виде функций требуемой скорости вращения каждого ДВС: ΔNДmin(a)=f(NzД(a)) И ΔNДmax(a)=f(NzД(a)), ΔN'Дmin(a)=f(NzД(a)) и ΔN'Дmax(a)=f(NzД(a)) соответственно.
В этом случае диапазоны (ΔNДmin(a), ΔN'Дmin(а)), (ΔN'Дmin(a), ΔN'Дmax(a)) и (ΔN'Дmax(a), ΔNДmax(a)) (см. фиг.5) обычно целесообразно задавать тем больше, чем больше требуемая скорость вращения ДВС. При этом обеспечивается стабильная работа ДВС во всем диапазоне скоростей вращения, т.к. чем выше скорость вращения ДВС, тем к более существенному изменению момента на валу ДВС ведет одинаковое рассогласование фактической и требуемой скорости вращения. И наоборот, чем ниже скорость вращения ДВС, тем менее существенное изменение момента на валу ДВС вызовет разница скоростей ΔNД(a). Для каждого ДВС в КВУ 36 вводят:
- зависимость полезного момента, который можно передать с данного ДВС на приводимые от него МГ, от требуемой Mzg(a)=f(NzД(a)) или фактической Mzg(a)=f(NД(a)) скорости вращения данного ДВС,
- зависимость требуемой величины скорости вращения от требуемой мощности ДВС NzД(a)=f(PzД(a)).
Причем если задают зависимость Mzg(a)=f(NzД(a)), то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от фактической скорости его вращения Mgпред(a)=f(NД(a)).
Для обеспечения оптимального управления КТЭО указанные характеристики вводят оптимальными в отношении определенного критерия. В качестве критериев оптимальности при задании характеристик NzД(a)=f(PzД(a)) и Mzg(a)=f(NzД(a)) или Mzg(a)=f(NД(a)) могут выбираться:
- расход топлива ДВС,
- КПД ДВС и/или совокупный КПД ДВС и каких-либо элементов КТЭО или КТЭО в целом,
- сочетание расхода топлива ДВС и КПД элементов КТЭО (всего КТЭО) и т.д.
Упомянутые выше зависимости Mzg(a)=f(NzД(a)), Mzg(a)=f(NД(a)) и NzД(a)=f(PzД(a)) получают на основе обеспечиваемых заводами-изготовителями ДВС или получаемых экспериментально многопараметровых характеристик, на которых отражается зависимость от скорости вращения ДВС данного типа ряда его параметров: обеспечиваемого ДВС вращающего момента MД=f(НД), полной мощности ДВС PД=f(МД) и расхода топлива ДВС beД=f(NД). Пример простейшего вида такой многопараметровой характеристики приведен на фиг.6, ее схематичное изображение - на фиг.7, а пример ее более полного вида - на фиг.8. Характеристики, подобные приведенным на фиг.6, используются при первичном выборе конкретного типа ДВС для его применения в КТЭО. Характеристики, аналогичные приведенным на фиг.8, используются при программировании контроллеров ДВС и КВУ.
На фиг.7 кривая MД=f(NД) соответствует зависимости от скорости вращения ДВС обеспечиваемого им полного вращающего момента. Ниже этой кривой показана другая кривая - Mg=f(NД), которая соответствует зависимости полезного момента, который можно передать с данного ДВС на приводимые от него МГ, от скорости вращения данного ДВС. Разница между этими кривыми соответствует моменту, который отбирается от ДВС для обеспечения работы вспомогательных агрегатов (устройств), таких как вентилятор системы охлаждения ДВС, навесные насосы, компрессоры и т.п. а также для наращивания кинетической энергии вращения ДВС-МГ при необходимости увеличить частоту вращения. Зависимость этого «вспомогательного» момента от скорости вращения ДВС Мвспом=f(NД) также может быть получена от завода-изготовителя ДВС или снята экспериментально. В итоге, требуемая зависимость получается из выражения Mg(NД)=MД(NД)-Mвспом(NД).
Если в КВУ вводят зависимость Mzg(a)=f(NzД(a)), то мощность МГ более точно соответствует мощности, требуемой, чтобы обеспечить заданный водителем суммарный момент ТЭД Mzt. Но поскольку момент МГ может превышать максимальный для текущих оборотов, ДВС может быть заглушен. Для исключения подобной ситуации обеспечивают ограничение суммарного момента МГ, приводимых от данного ДВС, по зависимости предельного полезного момента, который можно передать с данного ДВС на приводимые от него МГ, от фактической скорости его вращения Mgпред(a)=f(NД(a)).
Если же в КВУ вводят зависимость Mzg(a)=f(NД(a)), то глушение ДВС исключено и дополнительное ограничение момента МГ по фактической скорости вращения ДВС не нужно, оно уже реализовано заданием оптимальной зависимости Mzg(a)=f(NД(a)), которая всегда проходит ниже максимальной. Однако в таком случае мощность реализуется хуже, чем при задании Mzg(a)=f(NzД(a)), кроме того, возможно возникновение колебаний в системе ДВС-МГ, т.к. в задание требуемого момента МГ введена обратная связь по их фактической скорости вращения.
При создании транспортного средства определяют КПД КТЭО η, который также вводят в КВУ 36 посредством ПЭВМ 38 при программировании КВУ. В общем случае η вводят в виде зависимости от одного или ряда параметров режима работы элемента или совокупности элементов КТЭО транспортного средства. В частности, КПД КТЭО η может быть задан в зависимости от:
- требуемого суммарного электромагнитного момента Mzt ТЭД или момента, создаваемого МГ и ТЭД,
- скоростей вращения ТЭД (колес) Nt(c),
- условий работы КТЭО (напряжения шины постоянного тока Ud, температуры в определенных точках КТЭО и т.п.)
- условий движения транспортного средства (скорости, ускорения и т.п.),
- условий окружающей среды (температуры и влажности окружающего воздуха и т.п.) и др.
Указанные зависимости могут быть получены экспериментально, при этом могут быть учтены те параметры, которые оказывают наиболее существенное влияние на КПД КТЭО, а остальными можно пренебречь. В простейшем случае КПД КТЭО η может быть задан в виде константы.
В КВУ 36 посредством ПЭВМ 38 предварительно введено программное обеспечение, содержащее описываемые ниже алгоритмы определения и распределения электромагнитных моментов, реализуемых мотор-генераторами 7, 8 и 9 и тяговыми электродвигателями 20 и 25.
При этом учитывается следующее.
Электромагнитные моменты электрических машин различаются по знаку скорости их вращения: момент считается двигательным, если мощность на валу, т.е. произведение скорости на момент положительно, при этом электрическая машина потребляет мощность из питающей сети, т.е. из ШПТ. В противном случае момент считается генераторным, при этом электрическая машина возвращает мощность на ШПТ:
если N·M>0, то M - двигательный,
если N·M<0, то M - генераторный.
Если же для какой-либо из электрических машин N-M=0, то это возможно, либо при M=0, либо при N=0. В первом случае задание момента для данной машины нулевое и, очевидно, не подлежит ограничению. Второй случай может иметь место, например, в переходных режимах или при изменении направления вращения машины. В таком случае мощность электрической машины нулевая и задание момента также не нуждается в дополнительном ограничении. Момент в этом случае будет ограничен максимальной величиной для данной электрической машины, зависящей от допустимых токов через соответствующий силовой преобразователь.
В КВУ 36 в каждый момент времени поступают измеренные и определенные значения:
- напряжения шины постоянного тока Ud от датчика 17,
- скорости вращения каждого мотор-генератора Ng(b) (прямо пропорциональной скорости вращения соответствующих ДВС NД(a)) от датчиков 10 и 11,
- скорости вращения каждого тягового электродвигателя Nt(c) от датчиков 24 и 29.
Также в КВУ 36 поступают мгновенные значения задаваемых водителем транспортного средства требуемого суммарного электромагнитного момента ТЭД Mzt и требуемой скорости вращения ДВС-1 NzД(1).
Причем заданная водителем величина Mzt распределяется в КВУ 36 по тяговым электродвигателям, т.е. КВУ определяет требуемый момент каждого из тяговых электродвигателей Mzt(c), в соответствии с введенным в него посредством ПЭВМ 38 алгоритмом. Такой алгоритм может обеспечивать исключение буксования, заноса транспортного средства, оптимальные условия его работы и управляемости и т.п. При распределении КВУ задания Mzt(c) по тяговым электродвигателям, для каждого из них оно ограничивается КВУ на уровне, не превышающем его заданную максимально допустимую величину Mzt≤Mztmax(c), которая определяется исходя из физических ограничений тягового привода (самих ТЭД, редукторов, дифференциалов и т.д.).
В КВУ 36 в каждый момент времени определяют требуемую мощность каждого тягового электродвигателя. Эта мощность, в частности, может определяться из выражения Pzt(c)=Mzt(c)·Nt(c). Далее определяют сумму требуемых мощностей всех ТЭД ΣPzt(c).
Далее, в КВУ определяют требуемую величину суммарной мощности всех мотор-генераторов. Она может, в частности, определяться с учетом КПД КТЭО из выражения:
Pzg=ΣPzt(c)/η.
Затем в КВУ, исходя из заданных для каждого ДВС характеристик их мощности (то же, что зависимость NzД(a)=f(РzД(a)) для каждого ДВС) определяют необходимое для генерирования Pzg количество ДВС и связанных с ними мотор-генераторов. Посредством КВУ обеспечивают их работу передачей в контроллеры ДВС 3 и 4 заданий требуемой скорости их вращения, которая будет оптимальной в каждый момент времени, т.к. зависимости NzД=f(PzД), как указано выше, задаются оптимальными для каждого ДВС.
При этом требуемая величина суммарной мощности мотор-генераторов распределяется КВУ 36 по ДВС в соответствии с определенным алгоритмом, введенным в КВУ из ПЭВМ 38. Этот алгоритм может, в частности, предусматривать работу ДВС-1 (NzД(1)≠0) при ненулевом требуемом суммарном моменте ТЭД (Mzt≠0) с запуском ДВС-2 (NzД(2)≠0) при достижении определенной пороговой требуемой мощности Pzg и остановкой ДВС-2 (NzД(2)=0), когда требуемая мощность Pzg достигла определенного меньшего значения. Также алгоритм может предусматривать запуск ДВС-2 (NzД≠0) с одновременным исключением работы ДВС-1 (NzД(1)=0) при нулевой скорости транспортного средства (Nt(1)=Nt(2)=0).
КВУ 36 задает мощность, которую должен обеспечить каждый находящийся в работе ДВС PzД(a), и по заданной для каждого ДВС зависимости NzД(a)=f(PzД(a)) определяет требуемую скорость его вращения NzД(a) и реализует ее, передавая соответствующее задание в контроллеры ДВС 3 и 4 (см. фиг.7).
Скорость вращения NzД(a) может также определяться по определенным или заданным ранее параметрам или зависимостям параметров работы ЭМТ транспортного средства. Например, она может определяться по заданию водителя транспортного средства или в зависимости от скорости движения транспортного средства, пропорциональной скорости (скоростям) вращения ТЭД.
Далее в КВУ по заданной для каждого ДВС зависимости Mzg(a)=f(NzД(a)) или Mzg(a)=f(NД(a)) определяют суммарный электромагнитный момент Mzg(a), который должны обеспечить мотор-генераторы, приводимые от каждого ДВС. Причем если Mzg(a) определяют по зависимости от требуемой скорости Mzg(a)=f(NzД(a)), то, как указано выше, дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого ДВС по заданной для него зависимости Mgпpeд(a)=f(NД(a)) и ограничивают суммарный момент, обеспечиваемый МГ, приводимыми от каждого ДВС Mzg(a) значением определенного предельного момента Мgпред(a). Схематично зависимость Мgпред=f(NД) изображена на фиг.7 штрихпунктирной линией. Пример задания зависимостей Mzg=f(NzД) и Mgпред=f(NД) для конкретной модели ДВС приведен на фиг.8 (нижняя и верхняя кривые соответственно). Возможность превышения требуемого момента Mzg(a) над предельным Мgпред обусловлена тем, что первая величина определяется по требуемой скорости вращения ДВС NzД, а вторая - по фактической NД, которые в силу разных причин (инерционность управления, задержка по времени, необходимая для набора связкой ДВС-МГ дополнительной кинетической энергии и т.п.) могут не совпадать и иногда - существенно.
На фиг.7 также видно, что в КТЭО можно обеспечить компрессионное торможение с передачей энергии движения транспортного средства в ДВС. Для этого задание требуемого момента Mzg может формироваться КВУ отрицательным, не ниже скорости вращения холостого хода данного ДВС NXX (штриховая линия на фиг.7).
Суммарный электромагнитный момент Mzg(a), который должны обеспечить МГ, приводимые от каждого ДВС, также может определяться по определенным или заданным ранее параметрам или зависимостям параметров работы ЭМТ транспортного средства. Так, Mzg(a) может быть определен из выражений:
Mzg(a)=РzД(a)/(NzД(a)·η) или
Мzg(a)=PzД(a)/(NД(a)·η).
Далее определяют разницу ΔNД(a) фактической и требуемой скорости вращения каждого теплового двигателя из выражения:
ΔNД(a)=NД(a)-NzД(а).
Из величин суммарных электромагнитных моментов Mzg(a) МГ, приводимых каждым ДВС, определяют суммарный электромагнитный момент, который должны обеспечить все МГ, входящие в КТЭО Mzg=ΣMzg(a).
Далее выполняется ряд ограничений требуемого электромагнитного момента каждой электрической машины. Для ограничения моментов вводятся коэффициенты ограничения (множительные коэффициенты) k. Значения множительных коэффициентов k выбирается в диапазоне [0, 1] пропорционально расположению ограничивающего параметра (напряжения ШПТ и скоростей вращения электрических машин и ДВС в зоне ограничений). Причем k=1 соответствует началу действия ограничения, k=0 - полному ограничению момента.
Выполняется первое и второе ограничение: суммарных моментов МГ и ТЭД по напряжению шины постоянного тока Ud.
Выполняется ограничение требуемых суммарных электромагнитных моментов тяговых электродвигателей и мотор-генераторов по величине напряжения шины постоянного тока Ud. Цель ограничения - не допустить выхода Ud за определенные границы рабочего диапазона [Udmin, Udmax].
Средство достижения этой цели - при снижении значения напряжения Ud ниже границы начала регулирования U'dmin начинают ограничиваться двигательные моменты МГ и ТЭД, т.е. снижается мощность, потребляемая электрическими машинами из ШПТ, а при повышении Ud выше границы начала регулирования U'dmax, начинают ограничиваться генераторные моменты МГ и ТЭД, т.е. снижается мощность, передаваемая этими электрическими машинами на ШПТ. При достижении минимального Udmin или максимального Udmax значения напряжения ШПТ, полностью ограничиваются (обнуляются) соответственно двигательные или генераторные моменты МГ и ТЭД.
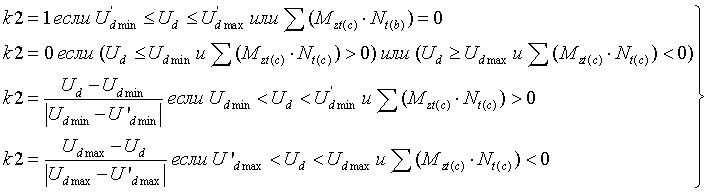
Для ограничения по Ud суммарного электромагнитного момента каждого типа электрических машин определяются коэффициенты ограничения k1 и k2 (фиг.2), причем k1 - коэффициент ограничения суммарного момента всех мотор-генераторов по Ud, а k2 - коэффициент ограничения суммарного момента всех тяговых электродвигателей по Ud.
Величины коэффициентов k1 и k2 зависят от измеренного значения напряжения Ud.
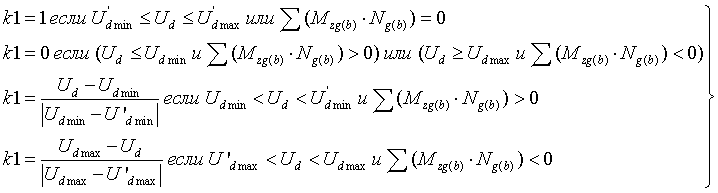
Если напряжение Ud находится в допустимом диапазоне U'dmin≤Ud≤U'dmax или суммарная мощность МГ или ТЭД нулевая ∑(Mzg(b)-Ng(b))=0 (или ∑(Mzt(c)·Nt(c))=0), то суммарные моменты МГ (ТЭД) не ограничиваются, т.е. k1=1 (k2=1').
При Ud≤Udmin полностью ограничиваются (обнуляются) суммарные двигательные моменты МГ и ТЭД, т.е. задается k1=0 (k2=0).
При Ud≤Udmax полностью ограничиваются (обнуляются) суммарные генераторные моменты МГ и ТЭД, т.е. задается k1=0 (k2=0).
При возрастании мгновенного значения напряжения Ud от минимального значения напряжения ШПТ Udmin до границы начала регулирования U'dmin и если суммарные требуемые моменты МГ или ТЭД при этом двигательные, т.е. при условии ∑(Mzg(b)-Ng(b))>0 {∑(Mzt(c)·Nt(c))>0), коэффициенты ограничения k1(k2) изменяются от 0 до 7 в монотонно возрастающей функции A(Ud, Udmin, U'dmin).
При возрастании мгновенного значения напряжения Ud от границы начала регулирования U'dmax до максимального значения напряжения ШПТ Udmax и если суммарные требуемые моменты МГ или ТЭД при этом генераторные, т.е. при условии Z(Mzg(b)·Ng(b))<0 (∑(Mzt(c)·Nt(c))<0), коэффициенты ограничения k1(k2) изменяются от 7 до 0 в монотонно убывающей функции B(Ud, U'dmax, Udmax).
В общем случае зависимости коэффициентов k1 и k2 от величины напряжения Ud в диапазонах, где действуют ограничения, могут быть любыми монотонно изменяющимися функциями, например линейными, линейно-квадратическими, логарифмическими и т.д.
В простейшем случае, когда зависимости k1 и k2 от Ud в диапазонах, где действуют ограничения, заданы линейными функциями, выражения для этих ограничивающих коэффициентов приобретут вид:
При снижении напряжения Ud до величины Udmin КВУ выдает на информационное табло водителя 39, установленное в кабине трактора, сигнал «Снижение напряжения ШПТ», а при повышении напряжения Ud до величины Udmax - сигнал «Превышение напряжения ШПТ».
После определения коэффициента ограничения суммарного момента всех мотор-генераторов по Ud k1 в КВУ 36 определяют реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg из выражения Mrg=Mzg·k1.
Ограниченный таким образом суммарный момент всех мотор-генераторов в соответствии с введенным в КВУ алгоритмом распределяют по мотор-генераторам, определяя реализуемый электромагнитный момент Mrg(b) каждого из них. При этом алгоритм распределения моментов учитывает параметры каждого МГ и условия работы ДВС, приводящего данный МГ (находится ли он в работе в текущий момент и т.п.). В простейшем случае распределение моментов между мотор-генераторами, приводимыми от одного и того же ДВС, осуществляется пропорционально отношению скорости вращения данного МГ (приведенной к валу ДВС через передаточное отношение iab между a-м ДВС и b-м МГ) к сумме скоростей вращения всех МГ, приводимых от данного ДВС (также приведенных к валу ДВС):
Выполняется третье ограничение: суммарного момента ТЭД по разнице фактических и требуемых скоростей вращения ТД.
Выполняется ограничение суммарного электромагнитного момента тяговых электродвигателей по отклонению определенных ранее фактических (мгновенных) скоростей вращения всех ДВС NД(a) от требуемых (заданных) скоростей их вращения NzД(a), т.е. по ошибкам регулирования скорости всех ДВС ΔNД(a). Цель ограничения - обеспечить выход ДВС на заданную скорость вращения NzД(a), ее поддержание с заданной точностью, т.е. в диапазоне отклонений [ΔN'Дmin(a), ΔN'Дmax(a)], и исключение выхода ΔNД(a) за границы диапазона [ΔNДmin(a), ΔNДmax(a)]. Средство достижения этой цели - при возникновении ошибки регулирования скорости какого-либо (всех) ДВС ограничивается момент ТЭД.
Данная цель актуальна в связи с нестабильностью параметров работы реального ДВС (изменяются качество топлива, воздуха, характеристики самого ДВС) и нестабильностью (непредсказуемостью) нагрузки ДВС, которая зависит от множества заранее неизвестных факторов (желания водителя, состояния дороги, атмосферных условий, наличия наряду с основной нагрузкой ТЭД вспомогательной нагрузки и т.п.). В то же время для нормальной и экономичной работы ДВС необходима стабильность скорости его вращения. Стабильность работы ДВС также необходима для нормальной работы нагрузки ВОМ.
Следует подчеркнуть, что в данном случае величины ΔN'Дmin(a), ΔN'Дmax(a), ΔNДmin(a), ΔNДmax(a) представляют собой не диапазоны допустимых и предельных отклонений, а конечные величины отклонений NД(a) от NzД(a) на границах таких диапазонов (см. фиг.5). При этом ΔN'Дmin(a) и ΔNДmin(a) имеют в общем случае отрицательное значение и соответствуют случаю, когда фактическая скорость a-го ДВС меньше, чем требуемая его скорость (например, если ДВС перегружен или глохнет). ΔN'Дmax(a) и ΔNДmax(a) имеют в общем случае положительное значение и соответствуют случаю, когда фактическая скорость a-го ДВС превышает его требуемую скорость (например, при резком сбросе нагрузки или «разносе» ДВС). В простейшем случае могут задаваться одинаковые по модулю и противоположные по знаку границы начала регулирования ΔN'Д(a)=mod(ΔN'Дmin(a))=mod(ΔN'Дmax(a)) и предельные разницы ΔNДmax(a)=mod(ΔNДmin(a))=mod(ΔNДmax(a)). Возможна ситуация, когда верхнее ограничение вводится только по максимальной скорости или не вводится вообще и генераторный момент отсутствует. Это объясняется тем, что резкий сброс нагрузки может быть вызван условиями движения (экстренное торможение) и сохранение тяги (единственная возможность для сброса энергия ДВС) в этих условиях нежелательно или недопустимо.
Для ограничения по разнице фактических и требуемых скоростей вращения ТД электромагнитного момента ТЭД сначала определяют коэффициент ограничения k3(a) суммарного электромагнитного момента ТЭД по отклонению фактической скорости вращения для a-го (каждого) ДВС от требуемой скорости его вращения от ΔNД(a) (фиг.3). Затем из полученных значений k3(a) определяют коэффициент ограничения k3 суммарного момента ТЭД по отклонению фактических скоростей вращения всех ДВС от соответствующих требуемых скоростей вращения. Таким образом, k3(a) - частный коэффициент ограничения, рассчитанный для каждого ДВС, a k3 - обобщенный коэффициент ограничения для всего КТЭО.
При снижении ΔNД(a) ниже границы начала регулирования ΔN'Дmin(a) начинает ограничиваться суммарный требуемый двигательный момент ТЭД, а при повышении ΔNД(a) выше границы начала регулирования ΔN'Дmax(a) начинает ограничиваться суммарный требуемый генераторный момент ТЭД.
При достижении разницей ΔNД(a) минимальной величины ΔNДmin(a), полностью обнуляется коэффициент ограничения k3(a) для суммарного требуемого двигательного момента ТЭД, а при достижении разницей ΔNД(a) максимальной величины ΔNДmax(a), полностью обнуляется коэффициент ограничения k3(a) для суммарного требуемого генераторного момента ТЭД.
Следует подчеркнуть, что обнуление коэффициента k3(a), полученного в зависимости от скорости вращения какого-либо из ДВС, еще не означает полного ограничения (обнуления) соответствующего суммарного момента ТЭД. Это объясняется тем, что обобщенный коэффициент ограничения k3 получается из частных коэффициентов k3(a) в зависимости от вклада каждого ДВС в генерацию мощности для КТЭО.
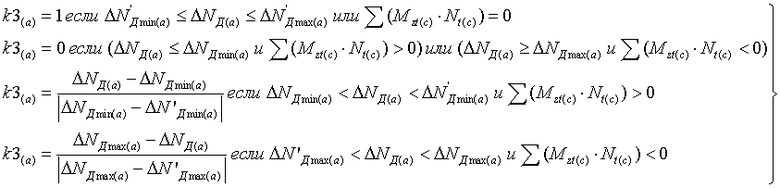
Если ΔNД(a) находится в допустимом диапазоне ΔN'Дmin(a)≤ ΔNД(a)≤ Δ'NДmax(a) или суммарная мощность ТЭД нулевая ∑(Mzt(c)·Nt(c))=0, то суммарные моменты ТЭД по ΔNД(a) не ограничиваются, т.е. k3(a)=1.
При ΔNД(a)≤ΔNДmin(a) обнуляется коэффициент ограничения для суммарного требуемого двигательного момента ТЭД, т.е. задается k3(a)=0.
При ΔNД(a)≥ΔNДmax(a) обнуляется коэффициент ограничения для суммарного требуемого генераторного момента ТЭД, т.е. задается k3(a)=0.
При возрастании разницы ΔNД(a) от минимальной величины ΔNДmin(a) до границы начала регулирования ΔN'Дmin(a) и если суммарные требуемые моменты ТЭД при этом - двигательные, т.е. при условии ∑(Mzt(c)·Nt(c))>0, коэффициент ограничения k3(a) изменяется от 0 до 7 в монотонно возрастающей функции A (ΔNД(a), ΔNДmin(a), ΔN'Дmin(a)).
При возрастании разницы ΔNД(a) от границы начала регулирования ΔNДmax(a) до максимальной величины ΔNДmax(a) и если суммарные требуемые моменты ТЭД при этом - генераторные, т.е. при условии ∑(Mzt(c)·Nt(c))<0, коэффициент ограничения k3(a) изменяется от 7 до 0 в монотонно убывающей функции В(ΔNД(a), ΔN'Дmax(a), ΔNДax(a)).
В простейшем случае, когда зависимости k3(a) от ΔNД(a) в диапазонах, где действуют ограничения, заданы линейными функциями, выражения для этих ограничивающих коэффициентов приобретут вид:
При снижении разницы ΔNД(a) до величины ΔNДmin(a) КВУ выдает на информационное табло водителя 39, установленное в кабине трактора, сигнал «Снижение оборотов a-го ДВС», а при повышении разницы ΔNД(a) до величины ΔNДmax(a) - сигнал «Превышение оборотов a-го ДВС».
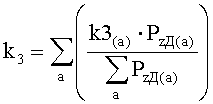
Получив значения k3(a) для всех ДВС, определяют коэффициент ограничения суммарного момента тяговых электродвигателей по отклонению фактических скоростей вращения всех тепловых двигателей от соответствующих требуемых скоростей вращения:
Таким образом, обобщенное значение k3 получается, как сумма частных k3(a), относящихся к каждому (a-му) ДВС, помноженных на весовой коэффициент, характеризующий вклад каждого (a-го) ДВС в мощность, генерируемую для КТЭО всеми ДВС вместе взятыми:

Далее в КВУ 36 определяют реализуемую величину суммарного электромагнитного момента Mrt тяговых электродвигателей, равную произведению Mzt на наименьшую из величин k2 и k3:
Mrt=Mzt·min(k2, k3).
Поскольку к суммарному моменту ТЭД прилагаются два ограничения, то выбирается наименьший из коэффициентов ограничения (k2 и k3), т.е. выполняется ограничение суммарного момента ТЭД по наиболее «строгому» из ограничений. Полученный таким образом суммарный момент ТЭД Mrt будет удовлетворять требованиям обоих ограничений.
Определенная величина Mrt распределяется в КВУ 36 по тяговым электродвигателям, (как и Mzt ранее) т.е. КВУ определяет реализуемый момент каждого из тяговых электродвигателей Mrt(c), в соответствии с введенным в него посредством ПЭВМ 38 алгоритмом. Такой алгоритм, как указано выше, может обеспечивать улучшение условий движения и управления транспортным средством. Очевидно, что распределение Мzt и Мrt по ТЭД должны коррелировать.
Выполняется четвертое ограничение: момента каждого ТЭД по скорости его вращения.
Выполняется ограничение реализуемого электромагнитного момента каждого тягового электродвигателя по мгновенной скорости его вращения Nt(c). Цель ограничения - не допустить выхода скорости вращения ТЭД за определенные границы рабочего диапазона [Ntmin(c), Ntmax(c)].
Средство достижения этой цели - при снижении Nt(c) ниже границы начала регулирования N'tmin(c) и при повышении Nt(c) выше границы начала регулирования N'tmax(c) начинает ограничиваться двигательный момент ТЭД. При достижении минимального Ntmin(c) или максимального Ntmax(c) значения скорости вращения ТЭД его двигательный момент полностью ограничивается (обнуляется).
Обычно для транспортных средств минимальная Ntmin(c) и максимальная Ntmax(c) скорости вращения ТЭД имеют разный знак и одинаковую величину, что соответствует противоположным направлениям вращения ТЭД и симметричному ограничению скорости его вращения в обоих направлениях.
Для ограничения по Nt(c) электромагнитного момента каждого ТЭД определяется коэффициент ограничения k4(c) двигательного момента каждого ТЭД по Nt(c) (фиг.4).
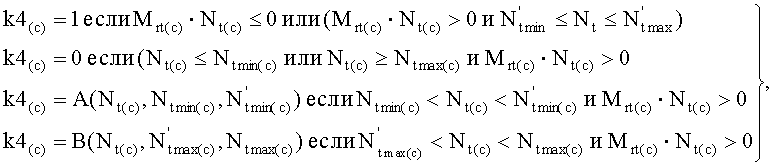
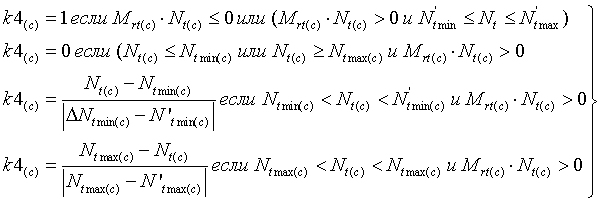
Если реализуемый момент ТЭД генераторный или мощность ТЭД нулевая (Mrt(c)·Nr(с)≤0) или если реализуемый момент ТЭД двигательный (Mrt(c)·Nr(c)>0) и при этом Nt(c) находится в допустимом диапазоне N'tmin(c)≤Nt(c)'N'tmax(c), то по Nt(c) момент данного ТЭД не ограничивается, т.е. k4(c)=1.
Если же реализуемый момент данного ТЭД двигательный, т.е. при Mrt(c)·Nr(c)>0, и скорость его вращения выходит за границы допустимого диапазона [N'tmin(c),N'tmax(c)], то величина коэффициента k4(c) зависит от измеренной мгновенной скорости вращения данного ТЭД Nt(c).
При Nt(c)≤Ntmin(c) или Nt(c)≥Ntmax(c) двигательный момент данного ТЭД полностью ограничивается (обнуляется), т.е. задается k4(c)=0.
При возрастании скорости вращения Nt(c) от минимального значения Ntmin(c) до границы начала регулирования N'tmin(c), коэффициент ограничения двигательного момента данного ТЭД k4(c) изменяется от 0 до 7 в монотонно возрастающей функции A(Nt(c), Ntmin(c), N'tmin(c)).
При возрастании скорости вращения Nt(c) от границы начала регулирования N'tmax(c) до максимального значения Ntmax(c), коэффициент ограничения двигательного момента данного ТЭД k4(c) изменяется от 7 до 0 в монотонно убывающей функции B (Nt(c), N'tmax(c), Ntmax(c)).
Зависимость k4(c) от величины скорости вращения Nt(c) в диапазонах, где действует ограничение, может быть любой монотонно изменяющейся функцией. В простейшем случае, когда зависимость k4(c) от Nt(c) в диапазонах, где действует ограничения, задана линейной функцией, выражения для этого коэффициента приобретут вид:
При достижении скоростью вращения ТЭД величины Ntmin(c) или Ntmax(c) КВУ выдает на информационное табло 39 сигнал «Превышение скорости с-го ТЭД».
Выполняется пятое ограничение: момента каждого МГ по скорости его вращения.
Выполняется ограничение реализуемого электромагнитного момента каждого мотор-генератора по скорости его вращения Ng(b). Цель ограничения - не допустить выхода скорости вращения МГ за определенные границы рабочего диапазона [Ngmin(b), Ngmax(b)). Это ограничение также обеспечивает защиту от выхода за границы рабочего диапазона прямо пропорциональной Ng(b) скорости вращения ДВС, приводящего данный МГ.
Средство достижения цели - при снижении мгновенного значения скорости вращения МГ Ng(b) ниже границы начала регулирования N'gmin(b) начинает ограничиваться генераторный момент МГ, а при повышении Ng(b) выше границы начала регулирования N'gmax(b) начинает ограничиваться двигательный момент МГ. При достижении минимальной Ngmin(b) скорости вращения МГ полностью ограничивается (обнуляется) его генераторный момент, а при достижении максимальной Ngmax(b) скорости вращения МГ полностью ограничивается (обнуляется) его двигательный момент.
Обычно для транспортных средств минимальная Ngmin(b) и максимальная Ngmax(b) скорости вращения МГ имеют одинаковый знак (МГ и ДВС обычно вращаются всегда в одну сторону - сторону вращения вала ДВС).
Для универсальности алгоритма возможна организация симметричного ограничения при положительной и отрицательной скорости вращения МГ. При этом не надо заранее определять направление вращения ДВС, приводящего данный МГ.
Для ограничения по Ng(b) реализуемого электромагнитного момента МГ определяется коэффициент ограничения k5(b) электромагнитного момента МГ по Ng(b) (фиг.5).
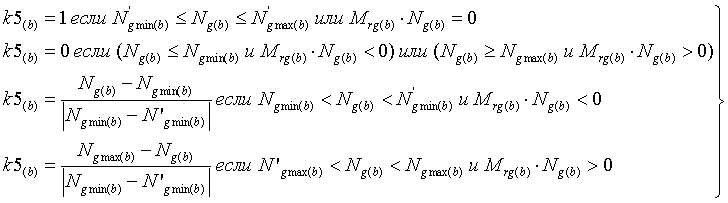
Если реализуемая МГ мощность нулевая (Mrg(b)·Ng(b)=0)или Ng(b) находится в допустимом диапазоне N'gmin(b)≤Ng(b)≤Ngmax(b), то по Ng(b) момент данного МГ не ограничивается, т.е. k5(b)=1.
Если же скорость вращения данного МГ выходит за границы допустимого диапазона [N'gmin(b),N'gmax(b)], то величина коэффициента k5(b) зависит от измеренной мгновенной скорости вращения данного МГ Ng(b).
При достижении Ng(b) минимального значения Ngmin(b) генераторный момент данного МГ полностью ограничивается (обнуляется), т.е. задается k5(b)=0.
При достижении Ng(b) максимального значения Ngmax(b) двигательный момент данного МГ полностью ограничивается (обнуляется), т.е. задается k5(b)=0.
При возрастании скорости вращения Ng(b) от минимального значения Ngmin(b) до границы начала регулирования N'gmin(b) и если реализуемый момент МГ при этом генераторный (Mrg(b)·Ng(b)<0), коэффициент ограничения k5(b) изменяется от 0 до 1 в монотонно возрастающей функции A (Ng(b), Ngmin(b), N'gmin(b)).
При возрастании скорости вращения Ng(b) от границы начала регулирования N'gmax(b) до максимального значения Ngmax(b) и если реализуемый момент МГ при этом - двигательный (Mrg(b)·Ng(b)>0), коэффициент ограничения k5(b) изменяется от 1 до 0 в монотонно убывающей функции B (Ng(b), N'gmax(b), Ngmax(b)).
Зависимость k5(b) от величины скорости вращения Ng(b) в диапазонах, где действует ограничение, может быть любой монотонно изменяющейся функцией. В простейшем случае, когда зависимость k5(b) от Ng(b) в диапазонах, где действует ограничения, задана линейной функцией, выражения для этого коэффициента приобретут вид:
При достижении скоростью вращения МГ величины Ngmin(b) КВУ выдает на информационное табло 39 сигнал «Снижение скорости b-го МГ», а при достижении скоростью вращения МГ величины Ngmax(b) - сигнал «Превышение скорости b-го МГ».
Сигналы, пропорциональные произведению Mrt(с) на определенные для каждого ТЭД коэффициенты k4(c) и Mrg(b) на определенные для каждого МГ коэффициенты k5(b), поступают на вход КСП 37, который управляет выпрямителями 13-15 и инверторами 18-19 таким образом, что мотор-генераторы 7-9 и тяговые электродвигатели 20, 25 КТЭО при помощи известных методов реализуют электромагнитные моменты, равные соответственно Mrg(b)·k4(b) и Mrt(c)·k3(c) (пример реализации заданного момента - Виноградов А.Б.: Векторное управление электроприводами переменного тока. Учебное пособие. - Иваново: ГОУВПО «Ивановский государственный энергетический университет им. В.И. Ленина», 2008, 298 с., с.196-206).
Очевидно, что любые изменения мощности ТЭД требуют немедленной компенсации генерируемой мощностью МГ. Для этого быстродействие выпрямителей, электрически связанных с МГ (системы ДВС-МГ) должно превышать быстродействие тягового привода, т.е. инверторов, электрически связанных с ТЭД. Это достигается, например, при использовании в КСП для выпрямителей, электрически связанных с МГ, векторного управления, а для инверторов, электрически связанных с ТЭД, частотного управления. Кроме того, для ТЭД можно использовать векторное управление с ограниченной динамикой или при соответствующей фильтрации сигнала задания момента. Последнее, вследствие достаточно большой полосы пропускания ТЭД, практически не сказывается на приемистости тягового привода. Выпрямитель, электрически связанный с МГ, при этом работает в режиме регулятора напряжения шины постоянного тока. ДВС со своим контроллером работает в режиме регулирования скорости вращения по сигналу задания, формируемому в соответствии с оптимальной зависимостью скорости от мощности, потребляемой МГ (с учетом мощности вспомогательных бортовых систем, которая может быть произвольной в пределах мощности, обеспечиваемой ДВС-МГ).
Приведенное выше описание варианта осуществления дает возможность специалистам в данной области реализовать или использовать данное изобретении. Специалистам в данной области техники очевидны различные модификации данного способа, при этом определенные в нем общие принципы можно применить для управления различными вариантами КТЭО широкого спектра транспортных средств (дорожных, внедорожных, рельсовых, водных, летательных и т.п.) с ЭМТ различной конфигурации (электромобилей, транспортных средств на топливных элементах, солнечных батареях и т.д.), в том числе гибридных, без необходимости использования дополнительного изобретательства. Например, если КТЭО транспортного средства содержит несколько ШПТ, с каждой из которых связаны свои МГ и ТЭД, то описанный способ в полной мере применим к каждой такой совокупности. Таким образом, настоящее изобретение не ограничивается показанным вариантом осуществления, а имеет широкий объем, соответствующий раскрытым принципам и новым признакам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ГИБРИДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2557686C1 |
| СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 2013 |
|
RU2547123C1 |
| СПОСОБ УПРАВЛЕНИЯ МОТОР-ГЕНЕРАТОРОМ | 2013 |
|
RU2550813C2 |
| НАСОСНЫЙ УЗЕЛ И СПОСОБ УПРАВЛЕНИЯ | 2018 |
|
RU2686018C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2562251C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2013 |
|
RU2535102C1 |
| СПОСОБ ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКО-ТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2462603C2 |
| СПОСОБ УПРАВЛЕНИЯ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2009 |
|
RU2424926C1 |
| Способ увеличения тягового класса трактора или дорожно-строительной машины на его шасси и устройство для его осуществления (варианты) | 2020 |
|
RU2741850C1 |
Изобретение относится к способу согласованного управления электромеханической трансмиссией транспортного средства. В способе предварительно задают минимальные и максимальные параметры каждого тягового электродвигателя, мотор-генератора, теплового двигателя, тяговых электродвигателей. Для каждого теплового двигателя задают зависимость требуемой величины скорости вращения от требуемой мощности, зависимость полезного момента от требуемой или фактической скорости его вращения. В каждый момент времени задают требуемую величину суммарного электромагнитного момента тяговых электродвигателей, которую распределяют по тяговым электродвигателям, определяя требуемый момент каждого из них. Определяют напряжение шины постоянного тока, скорости вращения мотор-генераторов, тяговых электродвигателей, тепловых двигателей, требуемую мощность каждого тягового электродвигателя, величину суммарной мощности мотор-генераторов, определяют необходимое для ее генерирования количество тепловых двигателей и связанных с ними мотор-генераторов. Распределяют по тепловым двигателям требуемую величину суммарной мощности мотор-генераторов. Определяют требуемую скорость вращения теплового двигателя, суммарный электромагнитный момент, который должны обеспечить мотор-генераторы, приводимые от a-го теплового двигателя, разницу фактической и требуемой скорости вращения каждого теплового двигателя, суммарный электромагнитный момент, который должны обеспечить все мотор-генераторы, и реализуемую величину суммарного электромагнитного момента всех мотор-генераторов и распределяют ее по мотор-генераторам, определяя реализуемый электромагнитный момент каждого из них. Определяют реализуемую величину суммарного электромагнитного момента тяговых электродвигателей и распределяют реализуемую величину суммарного электромагнитного момента по тяговым электродвигателям, определяя реализуемый момент каждого из них. Создают электромагнитный момент каждого тягового электродвигателя и электромагнитный момент каждого мотор-генератора. Достигается обеспечение плавного ограничения моментов электрических машин, исключающего выход параметров работы электромеханической трансмиссии за допустимые границы, оптимального распределения потоков мощности, оптимальной работы электромеханической трансмиссии. 4 з.п. ф-лы, 8 ил.
1. Способ согласованного управления электромеханической трансмиссией транспортного средства, включающей один тепловой двигатель или более, причем с каждым тепловым двигателем механически соединен один или несколько мотор-генераторов, и включающей один или несколько тяговых электродвигателей и один или несколько электронных блоков, управляющие элементами электромеханической трансмиссии в отдельности и/или трансмиссией в целом, причем мотор-генераторы и тяговые электродвигатели соединены с шиной постоянного тока через свои силовые преобразователи, заключающийся в том, что предварительно задают минимальное Udmin и максимальное Udmax значения напряжения шины постоянного тока, нижнюю U'dmin и верхнюю U'dmax границы регулирования момента мотор-генераторов и тяговых электродвигателей по напряжению, минимальное Ntmin(c) и максимальное Ntmax(c) значения скорости вращения каждого тягового электродвигателя, нижнюю N'tmin(c) и верхнюю N'tmax(c) границы регулирования его момента по скорости вращения, максимально допустимую величину его электромагнитного момента Mztmax(c), минимальное Ngmin(b) и максимальное Ngmax(b) значения скорости вращения каждого мотор-генератора, нижнюю N'gmin(b) и верхнюю N'gmax(b) границы регулирования его момента по скорости вращения, минимальную ΔNДmin(a) и максимальную ΔNДmax(a) разницу фактической и требуемой скорости вращения каждого теплового двигателя, нижнюю ΔN'min(a) и верхнюю ΔN'Дmax(a) границы регулирования суммарного момента тяговых электродвигателей по разнице фактической и требуемой скорости вращения каждого теплового двигателя, для каждого теплового двигателя задают зависимость требуемой величины скорости вращения от требуемой мощности NzД(a)=f(PzД(a)), зависимость полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от требуемой Mzg(a)=f(NzД(a)) или фактической Mzg(a)=f(NД(a)) скорости его вращения, причем если задают зависимость Mzg(a)=f(NzД(a)), то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от фактической скорости его вращения Mgпpeд(a)=f(NД(a)), в каждый момент времени задают требуемую величину суммарного электромагнитного момента Mzt тяговых электродвигателей, которую распределяют по тяговым электродвигателям, определяя требуемый момент каждого из них Mzt(c), не превышающий его заданную максимально допустимую величину Mztmax(c), определяют напряжение шины постоянного тока Ud, скорость вращения Ng(b) каждого мотор-генератора и скорость вращения Nt(c) каждого тягового электродвигателя, фактическую скорость вращения NД(a) каждого теплового двигателя, требуемую мощность каждого тягового электродвигателя Pzt(c) и с учетом Pzt(c) определяют требуемую величину суммарной мощности мотор-генераторов Pzg, определяют необходимое для ее генерирования количество тепловых двигателей и связанных с ними мотор-генераторов и обеспечивают их работу, распределяют по тепловым двигателям требуемую величину суммарной мощности мотор-генераторов Pzg, задавая мощность, которую должен обеспечить каждый находящийся в работе тепловой двигатель PzД(a), по заданной для каждого теплового двигателя зависимости NzД(a)=f(PzД(a)) или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства определяют требуемую скорость его вращения NzД(a) и реализуют ее, определяют по заданной для каждого теплового двигателя зависимости Mzg(a)=f(NzД(a) или Mzg(a)=f(NД(a)) или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства суммарный электромагнитный момент Mzg(a), который должны обеспечить мотор-генераторы, приводимые от каждого a-го теплового двигателя, причем если его определяют по зависимости Mzg(a)=f(NzД(a)), то дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого a-го теплового двигателя, по заданной для каждого теплового двигателя зависимости Mgпpeд(a)=f(NД(a)), и если определенные Mzg(a) превышают Mgпред(a), то Mzg(a) задают равными Mgпред(a), далее определяют разницу ΔNД(a) фактической и требуемой скорости вращения каждого теплового двигателя, суммарный электромагнитный момент, который должны обеспечить все мотор-генераторы, входящие в электромеханическую трансмиссию Mzg=∑Mzg(a), и реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg, равную произведению Mzg на коэффициент k1, и распределяют ее по мотор-генераторам, определяя реализуемый электромагнитный момент Mrg(b) каждого из них, далее определяют реализуемую величину суммарного электромагнитного момента Mrt тяговых электродвигателей, равную произведению Mzt на наименьший из коэффициентов k2 и k3, и распределяют реализуемую величину суммарного электромагнитного момента по тяговым электродвигателям, определяя реализуемый момент каждого из них Mrt(c), и создают электромагнитный момент каждого тягового электродвигателя, равный произведению Mrt(c) на коэффициент k4(c), и электромагнитный момент каждого мотор-генератора, равный произведению Mrg(b) на коэффициент k5(b),
где
a - индекс, соответствующий номеру теплового двигателя,
b - индекс, соответствующий номеру мотор-генератора,
c - индекс, соответствующий номеру тягового электродвигателя,
k1 - коэффициент ограничения суммарного момента мотор-генераторов по Ud,
k2 - коэффициент ограничения суммарного момента тяговых электродвигателей по Ud,
k3 - коэффициент ограничения суммарного момента тяговых электродвигателей по отклонению фактических скоростей вращения тепловых двигателей от соответствующих требуемых скоростей вращения,
k4(c) - коэффициент ограничения двигательного момента каждого тягового электродвигателя по Nt(c),
k5(b) - коэффициент ограничения момента каждого мотор-генератора по Ng(b),
причем значения коэффициентов k1, k2, k3, k4, k5 лежат в интервале [0, 1] и выбираются в зависимости от того, является ли режим работы соответствующей электрической машины генераторным или двигательным и от соответствующих каждому коэффициенту значений, лежащих внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, и изменение k1, k2, k3, k4 и k5 происходит в монотонно возрастающей или монотонно убывающей функции соответствующей данному коэффициенту величины ограничивающего параметра.
2. Способ согласованного управления электромеханической трансмиссией транспортного средства по п.1, в котором коэффициенты ограничения k1, k2, k3, k4 и k5 определяют исходя из следующих условий:
,
,
,
где
k3(a) - коэффициент ограничения суммарного момента тяговых электродвигателей по ΔNД(а),
A (x, x1, x2} - любая монотонно возрастающая в диапазоне значений от 0 до 1 функция аргумента x при возрастании x в диапазоне (x1, x2),
B (x, x1, x2) - любая монотонно убывающая в диапазоне значений от 1 до 0 функция аргумента x при возрастании x в диапазоне (x1, x2).
3. Способ согласованного управления электромеханической трансмиссией транспортного средства по п.1, в котором задают зависимости Mzg(a)=f(NzД(a)) и NzД(a)=f(PzД(a)) или Mzg(a)=f(NД(a)) и NzД(a)=f(PzД(a)) оптимальными в отношении критерия расхода топлива тепловых двигателей, или в отношении критерия совокупного коэффициента полезного действия тепловых двигателей и/или элементов или совокупности элементов электромеханической трансмиссии транспортного средства, или в отношении определенного сочетания указанных критериев.
4. Способ согласованного управления электромеханической трансмиссией транспортного средства по п.1, в котором предварительно задают коэффициент полезного действия электромеханической трансмиссии η в виде константы или зависимости от одного или ряда параметров режима работы элемента или совокупности элементов электромеханической трансмиссии транспортного средства и в каждый момент времени при определении требуемой величины суммарной мощности мотор-генераторов Pzg учитывают заданный η.
5. Способ согласованного управления электромеханической трансмиссией транспортного средства по п.1, в котором задают минимальную ΔNДmin(a) и максимальную ΔNДmax(a) разницу фактической и требуемой скорости вращения каждого теплового двигателя, нижнюю ΔN'Дmin(a) и верхнюю ΔN'Дmax(a) границы регулирования суммарного момента тяговых электродвигателей по разнице ΔNД(a) фактической и требуемой скорости вращения каждого теплового двигателя в зависимости от требуемой скорости вращения данного теплового двигателя ΔNДmin(a)=f(NzД(a)) и ΔNДmax(a)=f(NzД(a)), ΔN'Дmin(a)=f(NzД(a)) и ΔN'Дmax(a)=f(NzД(a)) соответственно.
| RU 2010114407 A, 20.10.2011 | |||
| СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ АВТОНОМНОГО ОБЪЕКТА | 2010 |
|
RU2436691C1 |
| WO 2010130284 A1, 18.11.2010 | |||

