Изобретение относится к области гидроакустики и может быть применено для обнаружения подводных объектов, движущихся с малой радиальной скоростью в контролируемой акватории: подводных пловцов, морских животных, крупных рыб.
Известны гидролокационные способы обнаружения и селекции движущихся объектов, основанные на излучении импульсных сигналов, приеме отраженных сигналов, спектральном анализе принятых сигналов, измерении доплеровского смещения частотных составляющих в принятых сигналах, принятии решения об обнаружении движущегося объекта по превышению полезного сигнала над заданным порогом [1, 2]. При малых радиальных скоростях движения объектов данные способы не эффективны из-за трудностей выделения доплеровского смещения спектра полезного сигнала на фоне флуктуирующих спектров сигналов, отраженных от локальных и распределенных неподвижных объектов на дне и в водном пространстве акватории.
Известен также способ по патенту [3]. Суть способа заключается в определении разности фаз излученного и отраженного сигналов с использованием корреляционной обработки и учета ее при измерении радиальных скоростей объектов по доплеровским параметрам в мультипликативном масштабе. Однако в условиях наблюдения объектов, движущихся с малой скоростью вблизи дна, кроме шумовой помехи на приемник воздействует и реверберационная, которая представляет собой распределенные сигналы от неподвижных объектов, при этом корреляция будет высокой для всех отражающих объектов и выделить на фоне помех движущийся с малой скоростью объект будет практически невозможно.
Наиболее близким к предлагаемому изобретению является способ по патенту [4]. Суть способа заключается в том, что производится последовательное облучение с помощью гидроакустического излучателя различных зон контролируемой области модулированным излучением с амплитудами несущей ниже уровня морских шумов, прием акустических сигналов, отраженных от подводного объекта гидроакустическим приемником, демодуляция принятого сигнала, временная фильтрация, с последующим определением местоположения, курса и скорости движения объекта по параметрам принятого сигнала. Однако помехоустойчивость способа определяется единичным обнаружением и в условиях реверберационной помехи может оказаться низкой.
Задачей изобретения является повышение достоверности обнаружения подводных объектов, движущихся с малой радиальной скоростью, в условиях малых соотношений сигнал/помеха при воздействии шумовых и реверберационных помех и предоставление возможности оператору ГЛС различать обнаруженные подвижные и неподвижные объекты.
Для решения поставленной задачи в гидролокационном способе обнаружения подводных объектов, движущихся с малой радиальной скоростью, основанном на последовательном облучении водного пространства гидроакустическими сигналами по различным направлениям, приеме эхосигналов от неподвижных и движущихся с малой радиальной скоростью объектов, демодуляции, фильтрации и отображении на экране двухкоординатного индикатора принятых эхосигналов, введены новые признаки, а именно: одновременно по m направлениям осуществляют k циклов “излучение-прием”, запоминают все принятые эхосигналы, дискретизированные по l элементам дистанции, отображают их на экране двухкоординатного индикатора в виде яркостных отметок так, что по каждому из m направлений последовательно k раз отображают l элементов дистанции, при этом количество одновременно отображаемых по каждому из m направлений элементов после завершения k-го цикла и при дальнейшем облучении водного пространства сохраняют равным kl, удаляя l элементов начального цикла, сдвигая оставшиеся элементы и на освободившемся месте отображая l элементов последнего цикла, решение об обнаружении объекта по m-му направлению принимают по появлению на соответствующем участке экрана индикатора трассы, образованной яркостными отметками эхосигналов, полученных в k циклах “излучение-прием”, классификацию обнаруженных движущихся с малой радиальной скоростью и неподвижных объектов осуществляют по наличию наклона трасс яркостных отметок эхосигналов от движущихся объектов, обусловленного изменением дистанции до них и отсутствию наклона трасс яркостных отметок эхосигналов от неподвижных объектов.
Техническим результатом от использования способа является возможность обнаружения и классификации подводных объектов, движущихся с малой радиальной скоростью на фоне неподвижных объектов водного слоя и дна. Этот результат основывается на том, что неподвижные объекты в водном слое и элементы дна, образующие донную реверберацию, формируют стационарное изображение на экране индикатора в виде горизонтальных трасс, в то время как все движущиеся (даже с малой радиальной скоростью) объекты образуют наклонные трассы. Наклон трассы зависит от величины и направления изменения дистанции до объекта за k циклов “излучение-прием”.
Наиболее близким к заявляемому изобретению аналогом, который выбран в качестве прототипа, устройства, реализующего заявляемый способ, является рыбопоисковый гидролокатор “Угорь”, имеющий режим одновременного кругового обзора [5, стр. 140...153].
В состав гидролокатора входят:
- приемоизлучающая гидроакустическая антенна, состоящая из ненаправленных пьезоэлектрических преобразователей, объединенных в n идентичных поясов;
- переключатель “излучение-прием”;
- генераторное устройство;
- тракт приема, включающий аппаратуру обработки принятых сигналов и пульт управления с электронным индикатором.
В гидролокаторе “Угорь” в режиме одновременного кругового обзора антенна ненаправленно излучает акустические зондирующие сигналы в горизонтальной плоскости, то есть за одну посылку гидролокатор облучает все подводное пространство, окружающее судно. При этом в генераторном устройстве формируется импульс мощностью до 7,5 кВт, который через переключатель “излучение-прием” поступает на антенну, где электрическая энергия преобразуется в акустическую и излучается в воду.
В режиме приема осуществляется электронное круговое сканирование диаграммы направленности (ДН) в горизонтальной плоскости с большой частотой вращения. Наклон ДН изменяется электронным способом путем коммутации поясов антенны в переключателе “излучение-прием”. Обнаружение объектов производится оператором по текущей информации, получаемой в каждом цикле “излучение-прием”, без ее накопления на экране двухкоординатного электронного индикатора.
К недостаткам данного гидролокатора можно отнести:
- неэффективное использование потребляемой электроэнергии в режиме излучения из-за ненаправленного облучения окружающего пространства;
- отсутствие накопления информации на экране индикатора;
- потеря информации об эхосигналах от объектов при их приеме на вращающуюся с большой частотой в горизонтальной плоскости диаграмму направленности.
Задачей заявляемого устройства является устранение указанных недостатков гидролокатора-прототипа и достижение следующих технических результатов: снижение потерь энергии при излучении и повышение отношения сигнал/помеха в режиме приема, а также увеличение достоверности обнаружения и классификации подводных движущихся объектов.
Для достижения указанных технических результатов в гидролокационной станции (ГЛС) кругового обзора для обнаружения подводных движущихся объектов, содержащей гидроакустическую цилиндрическую антенну из пьезоэлектрических преобразователей, объединенных в n идентичных поясов, переключатель “излучение-прием”, генераторное устройство, тракт приема, включающий устройство обработки принятых сигналов и пульт управления с электронным индикатором, при этом входы управления генераторного устройства, переключателя “излучение-прием” и устройства обработки принятых сигналов соединены с соответствующими выходами управления пульта управления, введены новые признаки, а именно все пьезоэлектрические преобразователи гидроакустической цилиндрической антенны выполнены направленными, при этом каждый пояс содержит m пьезоэлектрических преобразователей, расположенных равномерно по окружности пояса с интервалом 2πR/m и соединенных при излучении параллельно, каждый пояс развернут вокруг своей оси относительно соседнего пояса так, что акустическая ось диаграммы направленности каждого i-го преобразователя одного пояса смещена относительно акустической оси диаграммы направленности i-го преобразователя соседнего пояса на угол ϕ=2π/mn, вход каждого пояса через переключатель “излучение-прием”, выполненный n-позиционным, соединен при излучении с выходом генератора, а при приеме выходы каждого из m преобразователей каждого пояса соединены через n-позиционный переключатель “излучение-прием”, выполненный в режиме приема m-канальным, с соответствующими информационными входами устройства обработки принятых сигналов, выполненного также m-канальным, m информационных выходов устройства обработки соединены с соответствующими m входами введенного в тракт приема блока памяти, содержащего k ячеек памяти для запоминания по каждому из m каналов в n положениях переключателя “излучение-прием” принятых эхосигналов, дискретизированных по l элементам дистанции, kmn выходы блока памяти соединены с соответствующими kmn входами двухкоординатного электронного индикатора, выполненного kmn-канальным.
При переходе к новой элементной базе тракт приема, включающий устройство обработки принятых сигналов, блок памяти и пульт управления с электронным индикатором, выполнен на цифровой вычислительной технике.
Таким образом, заявленные технические результаты достигнуты путем замены ненаправленного излучения и приема эхосигналов вращающейся диаграммой направленности на параллельно-последовательное излучение и прием эхосигналов веером статических ДН, а также накопления и представления информации об обнаруженных подводных объектах на многоканальном электронном индикаторе.
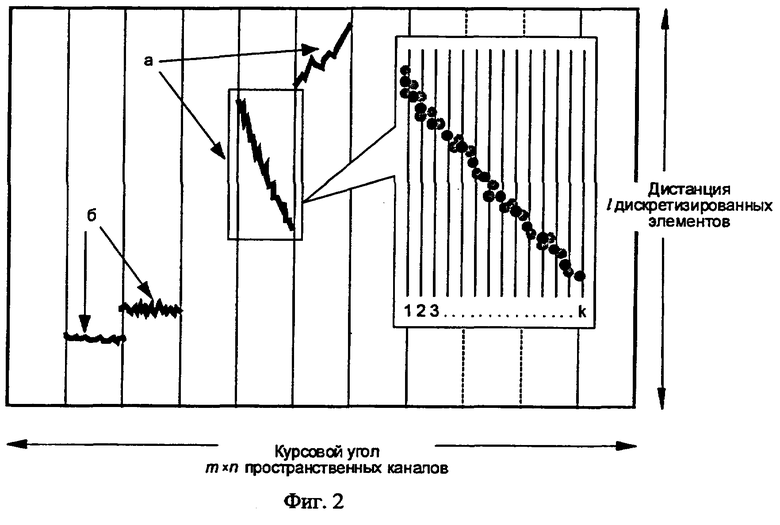
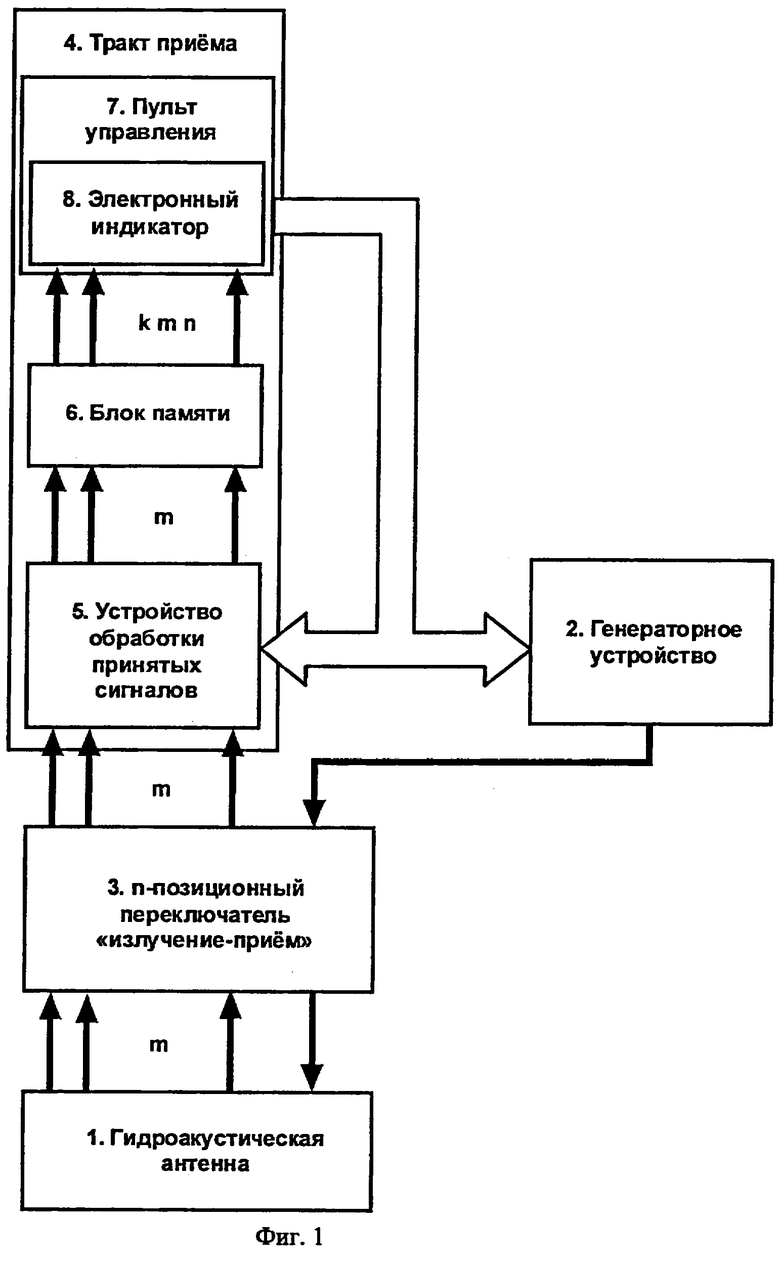
Сущность изобретения иллюстрируется фиг.1 и фиг.2, где на фиг.1 приведена блок-схема гидролокационной станции кругового обзора для обнаружения подводных движущихся объектов, реализующей предложенный способ, а на фиг.2 показано представление трасс от подвижных и неподвижных объектов на экране электронного индикатора в декартовых координатах.
Предлагаемая ГЛС содержит гидроакустическую цилиндрическую антенну 1 из пьезоэлектрических преобразователей, объединенных в идентичные пояса, входы поясов в режиме излучения соединяются через n-позиционный переключатель “излучение-прием” 3 с выходом генераторного устройства 2, а в режиме приема выходы поясов антенны 1 через тот же n-позиционный переключатель “излучение-прием” 3 соединяются с информационными входами тракта приема 4, включающего устройство обработки принятых сигналов 5, блок памяти 6, пульт управления 7 с электронным индикатором 8.
Гидроакустическая антенна 1 предназначена для преобразования электрических сигналов, поступающих на нее в режиме излучения от генераторного устройства в акустические сигналы, и для преобразования принимаемых акустических сигналов в электрические, которые подаются в тракт приема. В предложенной ГЛС гидроакустическая антенна конструктивно представляет собой цилиндр, собранный из шести (n) поясов, по окружности которых равномерно расположены восемь (m) пьезоэлектрических преобразователей. Каждый из этих приемоизлучающих преобразователей, являющихся направленным, формирует отдельный пространственный канал. Ширина ДН каждого пьезоэлектрического преобразователя на рабочей частоте составляет по горизонтали 7,5°, по вертикали 20°.
Угол между акустическими осями восьми ДН каждого пояса составляет 45°, при этом каждый пояс развернут вокруг своей оси относительно соседнего пояса на угол 7,5°. Таким образом, гидроакустическая антенна формирует в круговом горизонтальном секторе веер из 48 (mn) перекрывающихся на уровне 0,7 статических ДН.
Реализуемая ширина ДН в вертикальной плоскости обеспечивает обзор водного слоя до заданной глубины, что исключает необходимость изменения угла наклона ДН.
Генераторное устройство 2 предназначено для формирования, усиления и регулирования мощности зондирующих импульсов в соответствии с управляющими сигналами, поступающими из пульта управления 7, и поочередной подачи усиленных электрических импульсов на пояса антенны.
Описание состава генераторного устройства приведено в [5, стр. 153], при этом в нашем примере в качестве источника энергии использован емкостной накопитель с частичным разрядом, описание которого известно, например из [6, стр. 240...247].
Переключатель “излучение-прием” 3 в соответствии с управляющими сигналами, поступающими из пульта управления 7, производит поочередное подключение каждого пояса гидроакустической антенны 1 к выходу генераторного устройства 2 в режиме излучения и к восьми входам устройства обработки принятых сигналов 5 в режиме приема. Устройство переключателя “излучение-прием” известно, например из [2, стр. 77...80].
Тракт приема 4 предназначен для частотно-временной обработки сигналов, поступающих в режиме приема от гидроакустической антенны 1, накопления и отображения их на электронном индикаторе 8. Устройство приемного тракта гидролокационной станции кругового обзора известно и описано, например, в [2, стр. 99...132].
При переводе элементной базы тракта приема на цифровую вычислительную технику аналого-цифровое преобразование сигналов, их ввод в ЦВМ и обработка в цифровом виде производится согласно принципам, описанным в [7, стр. 32...42] и [8, стр. 389...436].
Устройство обработки принятых сигналов 5 предназначено для усиления, частотного преобразования спектра и фильтрации принятых сигналов. Принципы и устройства, реализующие указанную обработку, известны, например, из [2, стр. 112...115].
Введенный в тракт приема 4 блок памяти 6, являющийся оперативным запоминающим устройством ЦВМ, предназначен для накопления эхосигналов при параллельном приеме по восьми пространственным каналам, формируемым пьезоэлектрическими преобразователями каждого пояса антенны 1, в шести положениях переключателя “излучение-прием” 3, переключающего каждый пояс антенны на прием после каждого цикла излучения. При этом для накопления эхосигналов, дискретизированных по 500 (l) элементам дистанции, по каждому из 48 пространственных каналов в блоке памяти отводится пятнадцать (k) ячеек. Выходы каждой из 720 (kmn) ячеек блока памяти 6 соединены с соответствующими входами электронного индикатора 8.
Электронный индикатор кругового обзора 8 является двухкоординатным индикатором с яркостной отметкой и служит для отображения информации, поступающей из блока памяти 6, а также для классификации, определения дистанции и курсового угла всех отображенных на нем объектов, находящихся в пределах дальности действия ГЛС.
Изображение окружающей обстановки на электронном индикаторе по выбору оператора может быть представлено в декартовых и полярных координатах. Принципы построения электронного индикатора кругового обзора известны, например, из [2, стр. 130...133]. В рассмотренном примере 720-канальный электронный индикатор кругового обзора обеспечивает отображение обнаруженного объекта отдельными яркостными отметками, соответствующими каждому эхосигналу, приходящему в каждом из 15 циклов “излучение-прием” по каждому из 48 пространственных каналов.
Для изображения отметок эхосигналов по шкале дистанций в электронном индикаторе ГЛС по каждому из 720 каналов, расположенных по оси абсцисс, реализуется 500 (l) элементов разрешения по оси ординат.
С помощью предложенной ГЛС заявленный способ реализуется следующим образом.
После подачи на ГЛС электропитания на пульте управления 7 задают параметры излучаемых гидроакустических сигналов: тип, длительность, период следования, мощность. Затем начинают облучать водное пространство контролируемой акватории, для чего от генераторного устройства 2 через шестипозиционный переключатель “излучение-прием” 3 подают электрический импульс с рабочей частотой заполнения на гидроакустическую антенну 1, где он преобразуется в акустический сигнал, излучаемый в водную среду.
В каждом цикле “излучение-прием” сигнал излучают одновременно восемью пьезоэлектрическими преобразователями каждого из шести поясов антенны 1, которые переключают из режима излучения в режим приема с помощью переключателя “излучение-прием” 3. При наличии в зоне обзора ГЛС отражающих подводных объектов эхосигналы от них принимают теми же восемью пьезоэлектрическими преобразователями, которые преобразуют их в электрические сигналы. С выходов пьезоэлектрических преобразователей сигналы через переключатель “излучение-прием” 3 подают на восемь входов устройства обработки принятых сигналов 5. В нем принятые сигналы усиливают, преобразуют по частоте, фильтруют, переводят в цифровой вид и подают на восемь входов блока памяти 6.
После запоминания принятых и обработанных реализаций эхосигналов в восьми соответствующих ячейках блока памяти 6 через переключатель “излучение-прием” 3 подключают к выходу генераторного устройства 2 следующий пояс антенны 1 и начинают новый цикл “излучение-прием”. В результате пятнадцатикратного последовательного переключения шести поясов антенны 1 с излучения на прием в ячейках блока памяти 6 накапливают 720 реализаций эхосигналов, дискретизированных по 500 элементам дистанции.
Для отображения информации по каждому из 48 направлений наблюдения, соответствующих курсовым углам в секторе 0°±180°, на экране электронного индикатора 8 отводят 48 вертикальных полос, состоящих из пятнадцати линий. При этом эхосигнал, отраженный от объекта, индицируют на линии яркостной отметкой (точкой).
Набор полного кадра информации на экране электронного индикатора 8 по 48 направлениям осуществляют последовательно за пятнадцать циклов “излучение-прием”, дальнейшее обновление информации производят в текущем режиме: после каждого нового цикла “излучение-прием” в каждой из 48 полос экрана удаляют информацию начального цикла, оставшуюся на экране информацию сдвигают и на освободившемся месте отображают информацию, полученную в последнем цикле, и так далее на протяжении всего процесса наблюдения.
В результате при параллельно-последовательном круговом обзоре пространства, реализуемом в заявленном изобретении, обеспечивается одновременное обнаружение всех подвижных и неподвижных отражающих объектов и отображение эхосигналов от них на экране электронного индикатора 8 в виде протяженных групп (трасс) яркостных отметок. Трассы формируются из яркостных отметок, соответствующих эхо-сигналам от объектов, накопленным в блоке памяти на протяжении пятнадцати циклов “излучение-прием” и отображаемым на экране индикатора 8 в соответствии с направлениями на объекты и дистанциями до них.
Из фиг.2 видно, что трассы от неподвижных объектов вида “б” имеют горизонтальное положение, а трассы от подвижных объектов вида “а” имеют наклон, характер которого зависит от величины и направления изменения дистанции до объекта. Это позволит оператору ГЛС с большей достоверностью обнаруживать и классифицировать подвижные и неподвижные объекты в контролируемой акватории. При этом за счет режима текущего обновления информации при последующих циклах “излучение-прием” изменения в местоположении движущихся подводных объектов будут отображаться соответствующим перемещением их трасс на экране электронного индикатора 8.
Таким образом задача, поставленная в заявляемом изобретении, выполнена, так как по сравнению с прототипами в предложенных способе и ГЛС, реализующей способ, за счет параллельно-последовательного обзора с использованием веера статических диаграмм направленности обеспечивается уверенное обнаружение и достоверная классификация движущихся объектов, а также в два раза снижена мощность излучения и энергопотребления.
Источники информации
1. Бурдик B.C. Анализ гидроакустических систем. Л.: Судостроение, 1988, с.346-348.
2. Колчеданцев А.С. Гидроакустические станции. Л.: Судостроение, 1982, с.39-41, 105-107.
3. Патент России №2058033, кл. G 01 S 15/00.
4. Патент России №2150123, кл. G 01 S 15/04.
5. Тикунов А.И. Рыбопоисковые приборы и комплексы. Л.: Судостроение, 1989.
6. Рогинский В.Ю. Электропитание радиоустройств. Л.: Энергия, 1970.
7. Рокотов С.П., Титов М.С. Обработка гидроакустической информации на судовых ЦВМ. Л.: Судостроение, 1979.
8. Применение цифровой обработки сигналов. /Под ред. Э. Оппенгейма. М.: Мир, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| КОРАБЕЛЬНАЯ ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2173865C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2015 |
|
RU2603228C1 |
| Способ обработки гидролокационной информации | 2017 |
|
RU2660081C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
Изобретение относится к области гидроакустики и может быть применено для обнаружения подводных объектов, движущихся с малой радиальной скоростью в контролируемой акватории: подводных пловцов, морских животных, крупных рыб. Техническими результатами являются достижение возможности обнаружения и классификации подводных объектов, движущихся с малой радиальной скоростью, а также снижение потерь энергии при излучении гидроакустических сигналов и повышение отношения сигнал/помеха при приеме отраженных сигналов в гидролокационной станции кругового обзора. Способ основан на последовательном облучении водного пространства гидроакустическими сигналами по различным направлениям, приеме эхосигналов от неподвижных и движущихся с малой радиальной скоростью объектов, демодуляции, фильтрации и отображения на экране двухкоординатного индикатора принятых эхосигналов. При этом одновременно по m направлениям осуществляют k циклов "излучение-прием", запоминают все принятые эхосигналы, дискретизированные по l элементам дистанции, отображают их на экране двухкоординатного индикатора в виде яркостных отметок так, что по каждому из m направлений последовательно k раз отображают l элементов дистанции. Решение об обнаружении объекта по m-му направлению принимают по появлению на соответствующем участке экрана индикатора трассы, образованной яркостными отметками эхосигналов, полученных в k циклах "излучение-прием". Классификацию обнаруженных движущихся с малой радиальной скоростью и неподвижных объектов осуществляют по наличию наклона трасс яркостных отметок эхосигналов от движущихся объектов, обусловленного изменением дистанции до них, и отсутствию наклона трасс яркостных отметок эхосигналов от неподвижных объектов. Гидролокационная станция содержит гидроакустическую цилиндрическую антенну из пьезоэлектрических преобразователей, объединенных в n идентичных поясов, переключатель "излучение-прием", генераторное устройство, тракт приема. Каждый пояс развернут вокруг своей оси относительно соседнего пояса так, что акустическая ось диаграммы направленности каждого i-го преобразователя одного пояса смещена относительно акустической оси диаграммы направленности i-го преобразователя соседнего пояса на угол ϕ=2π/mn. 2 с. и 1 з.п. ф-лы, 2 ил.
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| ТИКУНОВ А.И | |||
| РЫБОПОИСКОВЫЕ ПРИБОРЫ И КОМПЛЕКСЫ | |||
| - Л.: СУДОСТРОЕНИЕ, 1989 | |||
| RU 2058033 С1, 10.04.1996 | |||
| СПОСОБ ОБНАРУЖЕНИЯ (КЛАССИФИКАЦИИ) ЯКОРНОЙ МИНЫ НА ТЕЧЕНИИ | 1991 |
|
RU2018876C1 |

